Содержание:
Определение: Вектором называется направленный отрезок прямой 
где А – начало, а В – конец вектора.
Замечание: Векторы в основном обозначают одной прописной буквой латинского алфавита со стрелочкой (или черточкой) наверху  .
.
Определение: Если начало и конец вектора  не закреплены, то он называется свободным.
не закреплены, то он называется свободным.
Замечание: Свободный вектор можно перемещать как вдоль его прямой, так и параллельно самому себе.
Определение: Если зафиксирована точка, которая определяет начало вектора, то она называется точкой приложения вектора.
Определение: Длиной (модулем) вектора а называется расстояние от его начала до его конца: 
Определение: Векторы называются коллинеарными (Рис. 1), если они лежат на одной прямой или в параллельных прямых.
Рис.1. Коллинеарные векторы.
Определение: Векторы называются компланарными (Рис. 2), если они лежат в одной плоскости или параллельных плоскостях.
Рис.2. Компланарные векторы.
Определение: Два коллинеарных вектора  и
и  называются равными, если они со-направлены и имеют одинаковую длину.
называются равными, если они со-направлены и имеют одинаковую длину.
Определение вектора и основные свойства
Многие величины, например, масса, длина, время, температура и др. характеризуются только числовыми значениями. Такие величины называются скалярными величинами. Некоторые же величины, например, скорость, ускорение, сила и др. определяются как числовыми значениями, так и направлением. Такие величины называются векторными величинами. Перемещение – самый простой пример векторных величин. Перемещение тела из точки  в точку
в точку  изображается с помощью направленного от до
изображается с помощью направленного от до  отрезка – вектора. Вектор изображается с помощью направленного отрезка.
отрезка – вектора. Вектор изображается с помощью направленного отрезка.
Длина этого отрезка, называется длиной или модулем вектора. Вектор обозначается указанием начальной и конечной точки. Например, вектор  , здесь – начало, вектора. Вектор обозначается также и маленькими буквами, например, вектор
, здесь – начало, вектора. Вектор обозначается также и маленькими буквами, например, вектор  . Длину вектора
. Длину вектора  обозначают, как:
обозначают, как: 
Два вектора называется равными, если они равны по модулю и одинаково направлены. На рисунке векторы  и
и  равны:
равны:  .
.
• Два вектора называются противоположными, если они равны по модулю и противоположно направлены.


Векторы  и
и  противоположны:
противоположны: 
Если начало и конец вектора совпадают, то такой вектор называется нулевым и обозначается  Длина нулевого вектора равна 0, а направление не определено. Если направленные отрезки, изображающие векторы, параллельны или лежат на одной и той же прямой, то они называются коллинеарными векторами. Коллинеарные вектора могут быть одинаково направлены или противоположно направлены. Одинаково направленные вектора обозначаются как
Длина нулевого вектора равна 0, а направление не определено. Если направленные отрезки, изображающие векторы, параллельны или лежат на одной и той же прямой, то они называются коллинеарными векторами. Коллинеарные вектора могут быть одинаково направлены или противоположно направлены. Одинаково направленные вектора обозначаются как  , а противоположно направленные
, а противоположно направленные  .
.
На рисунке векторы  -коллинеарные векторы. Здесь
-коллинеарные векторы. Здесь 
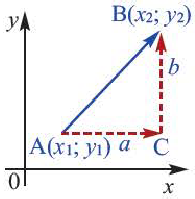
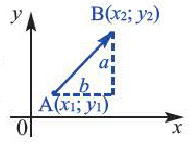
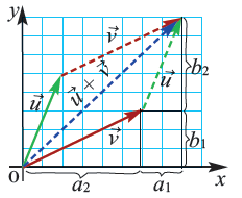
Выражения вектора компонентами в координатной плоскости
Рассмотрим вектор на координатной плоскости. Конечная точка  относительно начальной точки
относительно начальной точки  изменила свое положение вдоль оси
изменила свое положение вдоль оси  на
на  (при
(при  направо, при
направо, при  налево), вдоль оси
налево), вдоль оси  на
на  (при
(при  вверх, при
вверх, при  вниз). Векторы
вниз). Векторы  и
и  , определенные (и по модулю, и по направлению) парами чисел
, определенные (и по модулю, и по направлению) парами чисел  и
и  (как указано выше), являются компонентами вектора . На координатной плоскости вектор записывается как
(как указано выше), являются компонентами вектора . На координатной плоскости вектор записывается как  . Эта запись называется записью вектора с компонентами.
. Эта запись называется записью вектора с компонентами.
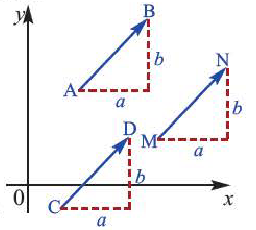
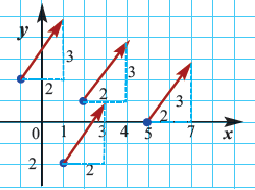
Равные векторы имеют равные компоненты. Наоборот, если, соответствующие компоненты векторов равны, то эти векторы равны. На рисунке  . Если дан какой либо вектор
. Если дан какой либо вектор  , то выбрав любую точку плоскости как начало, можно построить вектор равный данному, причем только один. Значит, выбирая разные начальные точки можно построить бесконечно много векторов равных данному.
, то выбрав любую точку плоскости как начало, можно построить вектор равный данному, причем только один. Значит, выбирая разные начальные точки можно построить бесконечно много векторов равных данному.
На координатной плоскости вектор 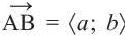 с начальной точкой
с начальной точкой  и конечной точкой
и конечной точкой  согласно координатам этих точек можно выразить с компонентами. Так как
согласно координатам этих точек можно выразить с компонентами. Так как  , то
, то  . Здесь
. Здесь  называются также координатами вектора.
называются также координатами вектора.
Длина вектора
Длину вектора можно найти по координатам начальной у и конечной точек, используя формулу расстояния между точками.

Длину вектора данными с компонентами можно найти по формуле: 
Пример 1.
Напишите вектор  начальная точка которого
начальная точка которого  , конечная
, конечная  в виде
в виде 
Решение: Напишем вектор с компонентами: 

Пример 2.
Точка  начальная точка вектора
начальная точка вектора  Найдите координаты конечной точки этого вектора.
Найдите координаты конечной точки этого вектора.
Решение: Примем за координаты конечной точки вектора  – точку
– точку  : Тогда
: Тогда  . Конечная точка этого вектора
. Конечная точка этого вектора 
Пример 3.
В координатной плоскости нарисуйте несколько векторов равных вектору  начальными точками которых являются точки
начальными точками которых являются точки  .
.
Решение: Данные точки отмечаются на координатной плоскости. Начиная с этих точек изображаются векторы равные 
Пример 4.
 и
и  соответственно начальная и конечная точка вектора
соответственно начальная и конечная точка вектора  . Напишите этот вектор в виде
. Напишите этот вектор в виде  и найдите длину
и найдите длину 
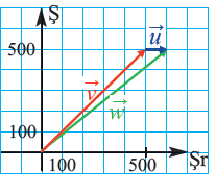
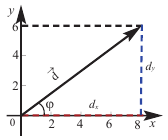
Направление вектора
В соответствии с областями применения существуют различные способы определения направления вектора. В повседневной жизни мы выражаем направление словами налево, направо, вниз, вверх или же восток, запад, север, юг. На координатной плоскости направление вектора определяется углом с положительным направлением оси  против часовой стрелки. Этот угол назовем углом наклона.
против часовой стрелки. Этот угол назовем углом наклона.
На рисунке длина вектора  обозначена
обозначена  а угол, определяющий направление, через
а угол, определяющий направление, через  .
.
длина вектора: 
направление вектора:  или
или 
Иногда для простоты вектор изображается на плоскости только указанием положительного направления  .
.
Пример 1.
Вектор перемещения, модуль которого 200 м, направлен под углом наклона  Выбрав масштаб 1 см : 100 м, нарисуйте этот вектор.
Выбрав масштаб 1 см : 100 м, нарисуйте этот вектор.
Решение: От начала луча, образующий с положительным направлением оси угол в  , соответственно масштабу 1 см : 100 м линейкой отложим отрезок длиной 2 см.
, соответственно масштабу 1 см : 100 м линейкой отложим отрезок длиной 2 см.
Пример 2.
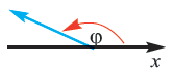
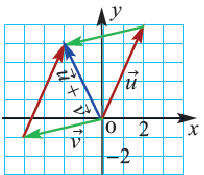
Определите длину и угол наклона вектора 
Решение: Произвольную точку на координатной плоскости примем за начало вектора. От этой точки по горизонтальной оси отложим компоненту  , равную 3 единицам, по вертикальной оси отложим компоненту
, равную 3 единицам, по вертикальной оси отложим компоненту  , равную 4 единицам, и построим вектор
, равную 4 единицам, и построим вектор  как показано на рисунке. Если измерить транспортиром угол
как показано на рисунке. Если измерить транспортиром угол  , то можно увидеть, что его приближенное значение равно
, то можно увидеть, что его приближенное значение равно  Это можно проверить вычислениями.
Это можно проверить вычислениями.
Длина вектора:  Угол наклона:
Угол наклона: 
Сложение и вычитание коллинеарных векторов
Вектор, показывающий сумму одинаково направленных коллинеарных векторов называется результирующим. Его абсолютная величина равна сумме абсолютных величин данных векторов, а сам вектор имеет одинаковое направление с данными векторами.

Абсолютная величина результирующего вектора 2-х противоположно-направленных коллинеарных векторов равна разности абсолютных величин этих векторов, а направление совпадает с направлением вектора большего по абсолютной величине.

Выполним графически сложение векторов, соответствующее реальным жизненным ситуациям.
Задача 1.
Для того, чтобы достичь финиша, Джамиля должна пройти 3 знака. Если она пройдет 10 м на восток, то доберется до 1-го знака, потом пройдя 50 м вперед до 2-го знака и, пройдя в том же направлении еще 20 м, сможет добраться до финиша. Изобразите движение Джамили графически – векторами. Выберем масштаб:
1 см : 10 м и на числовой оси нарисуем векторы так, чтобы начало второго вектора совпало с концом первого, а начало третьего с концом второго.

Результирующий вектор обозначим через  Его длину можно выразить как:
Его длину можно выразить как: 
Общее перемещение: 10 м + 50 м + 20 м = 80 м (на восток) Изображается вектор  длиной 8 см согласно выбранному масштабу.
длиной 8 см согласно выбранному масштабу.
Задача 2.
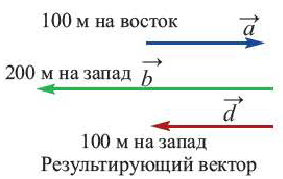
Представьте, что вы прошли 100 м на восток, еще 200 метров на запад.
Нарисуем данные вектора в масштабе
По определению, модуль результирующего вектора равен разности модулей векторов. А направление будет на запад.
В этом случае длина результирующего вектора  равна:
равна: 
200 м 100 м = 100 м (на запад)
Пусть векторы  и
и  противоположно направленные, а
противоположно направленные, а  их результирующий вектор. При
их результирующий вектор. При  и вектор
и вектор  одинаково направлен с вектором .
одинаково направлен с вектором .
При  и вектор одинаково направлен с вектором .
и вектор одинаково направлен с вектором .
При 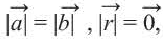 то есть сумма противоположных векторов равна
то есть сумма противоположных векторов равна  вектору.
вектору.
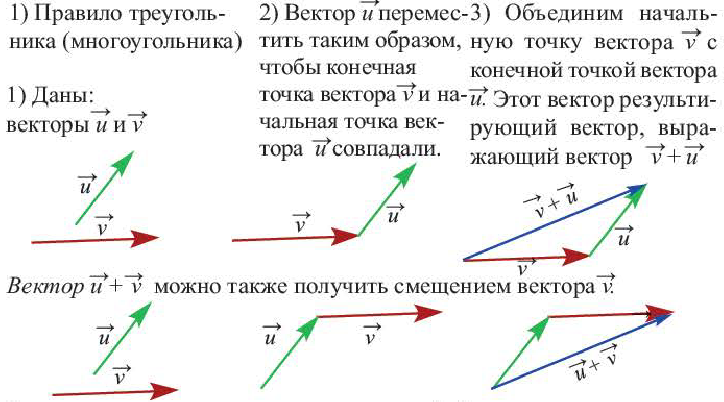
Для того, чтобы найти разность  нужно к вектору
нужно к вектору  прибавить вектор
прибавить вектор  , противоположный вектору
, противоположный вектору  .
.
То есть выражения  эквивалентные.
эквивалентные.


Жившие в XVII веке ученые-математики Рене Декарт и Пьер Ферма, взаимосвязывая алгебру и геометрию, создали новую область науки-аналитическую геометрию. Аналитическая геометрия, благодаря методу координат, позволила, с одной стороны, посредством алгебраических выкладок легко доказывать геометрические теоремы, а с другой стороны, в силу наглядности геометрических представлений упрощает решение задач над векторами.
Сложение векторов
Существуют различные способы сложения неколлинеарных векторов. Рассмотрим два графических способа. При сложении векторов графическим способом данные вектора и результирующий вектор, показывающий их сумму строятся с помощью линейки (модуль) и транспортира(направление).
Вектора можно складывать в любой последовательности. Переместительное свойство сложения верно и для векторов. По этому правилу можно складывать три и более вектора. Определим графическим способом вектор  Для этого: 1) нарисуем вектор
Для этого: 1) нарисуем вектор  противоположный вектору
противоположный вектору  2)
2)  переместим так, чтобы конечная точка вектора
переместим так, чтобы конечная точка вектора  совпадала с начальной точкой вектора
совпадала с начальной точкой вектора 
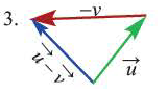
3. Соединим начальную точку вектора  и конечную точку вектора
и конечную точку вектора  Это будет вектор
Это будет вектор 
Пример 1.
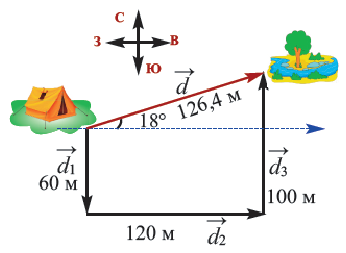
Джамал прошел от палатки, разбитой в лагере 60 метров на юг, 120 м на восток, еще 100 м на север и дошел до озера. Какое наименьшее расстояние от палатки до озера?
Решение:
Выберем масштаб: 1 см : 40 м
Движение Джамала изобразим последовательно соответствующими векторами по выбранному масштабу.
Начальную точку 1-го вектора, показывающего движение Джамала, соединим с конечной точкой 3-го вектора. Полученный результирующий вектор  выражает сумму векторов
выражает сумму векторов  Длина этого вектора приблизительно 126,4 метров, а направление под углом
Длина этого вектора приблизительно 126,4 метров, а направление под углом 
Ответ: Озеро находится на расстоянии 126,4 м от палатки.
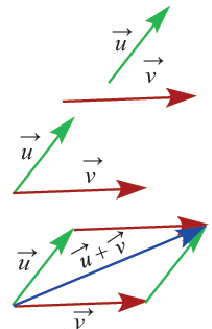
Правило параллелограмма
1. Даны вектора:  и
и 
2. Переместим вектор  так, чтобы начальные точки векторов
так, чтобы начальные точки векторов  и совпадали.
и совпадали.
3. Построим параллелограмм со сторонами и параллельным переносом соответствующих векторов и  Диагональ этого параллелограмма, которая соединяет начальную и конечную точку векторов
Диагональ этого параллелограмма, которая соединяет начальную и конечную точку векторов  показывает их сумму:
показывает их сумму: 
Переместительные и сочетательные свойства сложения векторов
Для любых векторов  верно следующее:
верно следующее:
Переместительное свойство: 
Сочетательное свойство: 
Свойство идентичности: 
Сумма противоположенных векторов: 
Пример:
Сложение векторов, заданных компонентами
Выполним сложение двух векторов на координатной плоскости, используя их компоненты.
Суммой векторов  и
и  будет вектор:
будет вектор: 
Пример 1.
Если  и
и  то вектор
то вектор  выразите через компоненты.
выразите через компоненты.
Решение: Для того, чтобы найти компоненты вектора  нужно по горизонтали (оси абсцисс) и по вертикали (оси ординат) сложить соответствующие компоненты векторов
нужно по горизонтали (оси абсцисс) и по вертикали (оси ординат) сложить соответствующие компоненты векторов 

Пример 2.
Самолет летит в направлении северо-востока со скоростью 707 миль/час. Скорость самолета выражается вектором  В восточном направлении дует ветер со скоростью 40 миль/час. Скорость ветра выражается вектором
В восточном направлении дует ветер со скоростью 40 миль/час. Скорость ветра выражается вектором  Как изменится скорость самолета под воздействием ветра?
Как изменится скорость самолета под воздействием ветра? 
Конечная скорость самолета:
Аналогично можно показать, что 
Пример 3.
Если  , то
, то 
Тригонометрические отношения и компоненты вектора
Найдем компоненты вектора  в координатной плоскости, используя тригонометрические отношения. Обозначим
в координатной плоскости, используя тригонометрические отношения. Обозначим 
 имеем:
имеем: 
Запись  также является записью вектора с компонентами. Угол наклона можно найти по формуле
также является записью вектора с компонентами. Угол наклона можно найти по формуле 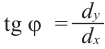
Пример 1.
Автомобиль движется в северо-восточном направлении под углом  со скоростью 80 км/ч. Напишите вектор скорости с компонентами.
со скоростью 80 км/ч. Напишите вектор скорости с компонентами.
Решение: По данным 

скорость в вост. напр. 
скорость в север, напр. 
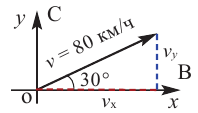
Пример 2.
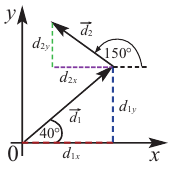
Движения мяча изображены двумя векторами:  с углом наклона
с углом наклона  и модулем равным 18 м и
и модулем равным 18 м и  с углом наклона
с углом наклона  и модулем равным 10 м. Определите вектор, показывающий перемещение мяча (модуль и направление).
и модулем равным 10 м. Определите вектор, показывающий перемещение мяча (модуль и направление).
Решение: Перемещение мяча:  Запишем векторы
Запишем векторы  c компонентами:
c компонентами: 
Здесь 

Пусть 
По правилу сложения векторов с заданными компонентами имеем: 
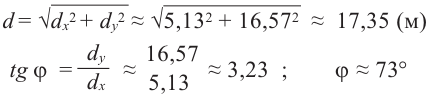
Найдем длину и угол наклона вектора перемежения  мяча, изобразив этот вектор в новой системе координат.
мяча, изобразив этот вектор в новой системе координат.

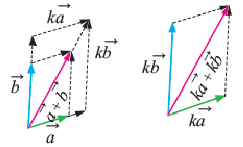
Умножение вектора на число
Произведение вектора на число
на число  записывается как
записывается как  а его длина равна
а его длина равна  при
при  вектора
вектора  имеют одинаковое направление, при
имеют одинаковое направление, при  вектора
вектора  имеют противоположное направление.
имеют противоположное направление. 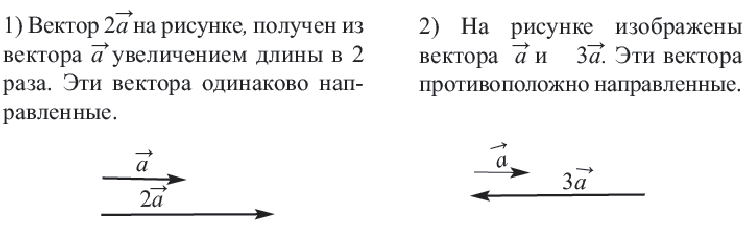 Любой вектор коллинеарен вектору, выражающему произведение этого вектора на число (отличное от нуля). Если
Любой вектор коллинеарен вектору, выражающему произведение этого вектора на число (отличное от нуля). Если  и
и  коллинеарные векторы, то существует единственное число
коллинеарные векторы, то существует единственное число  что
что 
Свойство умножения вектора на число
1. Сочетательное свойство.
Для любых чисел  и вектора
и вектора 

2. Распределительное свойство.
Для любых чисел  и вектора
и вектора 

Для любого числа  и векторов
и векторов 

Действия над векторами, заданным над координатами
Для вектора  заданного компонентами и для любого числа
заданного компонентами и для любого числа  верно:
верно: 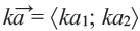
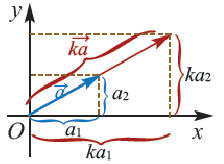
Пример: Если 
Пример: Если 

• Соответствующие координаты коллинеарных векторов пропорциональны.
• Наоборот, если соответствующие координаты векторов пропорциональны, то эти векторы коллинеарные.
Условие коллинеарности векторов  (при
(при  )
)
Пример: При каком значении  векторы
векторы  коллинеарны?
коллинеарны?
Подробное объяснение вектора:
Определение: Вектор — Упорядоченную совокупность  n вещественных чисел называют n-мерным вектором, а числа
n вещественных чисел называют n-мерным вектором, а числа  – компонентами, или координатами, вектора.
– компонентами, или координатами, вектора.
Пример:
Если, например, некоторый автомобильный завод должен выпустить в смену 50 легковых автомобилей, 100 грузовых, 10 автобусов, 50 комплектов запчастей для легковых автомобилей и 150 комплектов для грузовых автомобилей и автобусов, то производственную программу этого завода можно записать в виде вектора (50, 100, 10, 50, 150), имеющего пять компонент.
Обозначения:
Векторы обозначают жирными строчными буквами или буквами с чертой или стрелкой наверху, например,  Два вектора называются равными, если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Два вектора называются равными, если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Компоненты вектора нельзя менять местами, например, (3, 2, 5, 0, 1)  (2, 3, 5, 0, 1).
(2, 3, 5, 0, 1).
Операции над векторами. Произведением вектора  на действительное число
на действительное число  называется вектор
называется вектор  Суммой векторов
Суммой векторов  и
и  называется вектор
называется вектор 
Пространство векторов. N-мерное векторное пространство  определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
Экономическая иллюстрация. Экономическая иллюстрация n-мерного векторного пространства: пространство благ (товаров). Под товаром мы будем понимать некоторое благо или услугу, поступившие в продажу в определенное время в определенном месте. Предположим, что существует конечное число наличных товаров n; количества каждого из них, приобретенные потребителем, характеризуются набором товаров

где через  обозначается количество
обозначается количество  блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров
блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров 
Линейная независимость. Система  n-мерных векторов называется линейно зависимой, если найдутся такие числа
n-мерных векторов называется линейно зависимой, если найдутся такие числа  из которых хотя бы одно отлично от нуля, что выполняется равенство
из которых хотя бы одно отлично от нуля, что выполняется равенство  в противном случае данная система векторов называется линейно независимой, то есть указанное равенство возможно лишь в случае, когда все
в противном случае данная система векторов называется линейно независимой, то есть указанное равенство возможно лишь в случае, когда все  Геометрический смысл линейной зависимости векторов в
Геометрический смысл линейной зависимости векторов в  интерпретируемых как направленные отрезки, поясняют следующие теоремы.
интерпретируемых как направленные отрезки, поясняют следующие теоремы.
Теорема 1. Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой.
Теорема 2. Для того, чтобы два вектора были линейно зависимы, необходимо и достаточно, чтобы они были коллинеарны.
Теорема 3. Для того, чтобы три вектора были линейно зависимы, необходимо и достаточно, чтобы они были компланарны.
Левая и правая тройки векторов. Тройка некомпланарных векторов  называется правой, если наблюдателю из их общего начала обход концов векторов
называется правой, если наблюдателю из их общего начала обход концов векторов  в указанном порядке кажется совершающимся по часовой стрелке. В противном случае
в указанном порядке кажется совершающимся по часовой стрелке. В противном случае  – левая тройка. Все правые (или левые) тройки векторов называются одинаково ориентированными.
– левая тройка. Все правые (или левые) тройки векторов называются одинаково ориентированными.
Базис и координаты. Тройка  некомпланарных векторов в называется базисом, а сами векторы
некомпланарных векторов в называется базисом, а сами векторы  – базисными. Любой вектор
– базисными. Любой вектор  может быть единственным образом разложен по базисным векторам, то есть представлен в виде
может быть единственным образом разложен по базисным векторам, то есть представлен в виде  (1.1) числа
(1.1) числа  в разложении (1.1) называются координатами вектора
в разложении (1.1) называются координатами вектора  в базисе
в базисе  и обозначаются
и обозначаются 
Ортонормированный базис. Если векторы  попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным, а координаты
попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным, а координаты  прямоугольными. Базисные векторы ортонормированного базиса будем обозначать
прямоугольными. Базисные векторы ортонормированного базиса будем обозначать  Будем предполагать, что в пространстве выбрана правая система декартовых прямоугольных координат
Будем предполагать, что в пространстве выбрана правая система декартовых прямоугольных координат 
Векторное произведение. Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  , который определяется следующими тремя условиями:
, который определяется следующими тремя условиями:
- Длина вектора
 численно равна площади параллелограмма, построенного на векторах
численно равна площади параллелограмма, построенного на векторах 
- Вектор
 перпендикулярен к каждому из векторов
перпендикулярен к каждому из векторов 
- Векторы
 взятые в указанном порядке, образуют правую тройку.
взятые в указанном порядке, образуют правую тройку.
Для векторного произведения  вводится обозначение
вводится обозначение 
Если векторы  коллинеарны, тo
коллинеарны, тo  в частности,
в частности,  Векторные произведения ортов:
Векторные произведения ортов:  Если векторы
Если векторы  заданы в базисе
заданы в базисе  координатами
координатами  то
то  Смешанное произведение. Если векторное произведение двух векторов
Смешанное произведение. Если векторное произведение двух векторов  скалярно умножается на третий вектор
скалярно умножается на третий вектор  , то такое произведение трех векторов называется смешанным произведением и обозначается символом
, то такое произведение трех векторов называется смешанным произведением и обозначается символом  Если векторы
Если векторы  в базисе
в базисе  заданы своими координатами
заданы своими координатами 
Смешанное произведение имеет простое геометрическое толкование – это скаляр, по абсолютной величине равный объему параллелепипеда, построенного на трех данных векторах.
Если векторы образуют правую тройку, то их смешанное произведение есть число положительное, равное указанному объему; если же тройка  – левая, то
– левая, то  и
и  следовательно
следовательно 
Координаты векторов, встречающиеся в задачах первой главы, предполагаются заданными относительно правого ортонормированного базиса. Единичный вектор, сонаправленный вектору  обозначается символом
обозначается символом  Символом
Символом  обозначается радиус-вектор точки М, символами
обозначается радиус-вектор точки М, символами  обозначаются модули векторов
обозначаются модули векторов 
Пример №1
Найдите угол между векторами единичные векторы и угол между
единичные векторы и угол между  равен 120°.
равен 120°.
Решение:
Имеем: 




Окончательно имеем: 
Пример №2
Зная векторы АВ(-3,-2,6) и ВС(-2,4,4), вычислите длину высоты AD треугольника АВС.
Решение:
Обозначая площадь треугольника АВС через S, получим:

 значит, вектор
значит, вектор  имеет координаты
имеет координаты  (—5,2,10).
(—5,2,10).


Пример №3
Даны два вектора  Найдите единичный вектор
Найдите единичный вектор  , ортогональный векторам
, ортогональный векторам  и направленный так, чтобы упорядоченная тройка векторов
и направленный так, чтобы упорядоченная тройка векторов 
 была правой.
была правой.
Решение:
Обозначим координаты вектора  относительно данного правого ортонормированного базиса через
относительно данного правого ортонормированного базиса через  Поскольку
Поскольку  По условию задачи требуется, чтобы
По условию задачи требуется, чтобы  и
и  Имеем систему уравнений для нахождения
Имеем систему уравнений для нахождения 
Из первого и второго уравнений системы получим  Подставляя
Подставляя  в третье уравнение, будем иметь:
в третье уравнение, будем иметь: 
Используя условие  получим неравенство
получим неравенство 
С учетом выражений для  перепишем полученное неравенство в виде:
перепишем полученное неравенство в виде:  откуда следует, что
откуда следует, что 
Линейные операции над векторами
1. Сумма векторов. Для нахождения суммы векторов существует два правила: а) правило треугольника. Пусть векторы и неколлинеарные и пусть начало вектора совмещено с концом вектора , тогда их суммой будет вектор  начало которого совпадает с началом вектора , а его конец – с концом вектора (Рис. 3):
начало которого совпадает с началом вектора , а его конец – с концом вектора (Рис. 3):
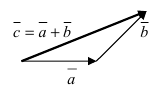
Рис. 3. Сложение векторов по правилу треугольника.
б) правило параллелограмма. Пусть векторы  неколлинеарные и пусть начала векторов
неколлинеарные и пусть начала векторов  совпадают. Построим на векторах
совпадают. Построим на векторах  параллелограмм (Рис. 4), тогда их суммой будет вектор
параллелограмм (Рис. 4), тогда их суммой будет вектор  начало которого совпадает с общим началом векторов , а его конец лежит в противоположной вершине параллелограмма:
начало которого совпадает с общим началом векторов , а его конец лежит в противоположной вершине параллелограмма: 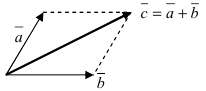
Рис. 4. Сложение векторов по правилу параллелограмма.
Сумма векторов обладает следующими свойствами:
-переместительным  ; – сочетательным
; – сочетательным 
2. Разность векторов. Разностью векторов  называется вектор
называется вектор  сумма которого с вектором
сумма которого с вектором  дает вектор
дает вектор  (Рис. 5):
(Рис. 5): 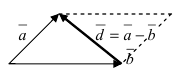 Рис. 5. Разность векторов.
Рис. 5. Разность векторов.
3. Умножение вектора на вещественное число. При умножении веществе иного числа k на вектор  получают ему коллинеарный вектор
получают ему коллинеарный вектор  длина которого равна
длина которого равна  сонаправленный с вектором
сонаправленный с вектором  если
если  и антинаправленный вектору
и антинаправленный вектору  если
если 
Замечание: Числа в векторной алгебре называют скалярами. Отметим здесь, что векторы и скаляры нельзя складывать и вычитать, так как это объекты разной природы.
Замечание: Из определения операции 3 следует первое условие коллинеарности векторов:  – отношения соответствующих проекции векторов должны быть равны между собой (о проекциях векторов см. ниже пункты 3 и 4).
– отношения соответствующих проекции векторов должны быть равны между собой (о проекциях векторов см. ниже пункты 3 и 4).
Пример №4
Найти произведение вектора  на 2 и (-3).
на 2 и (-3).
Решение:
Используя вышеприведенное правило, получим 
Произведение числа на вектор обладает следующими свойствами:
- – сочетательным

- – распределительным относительно скаляров

- -распределительным относительно векторов

Замечание: Если k = 0, то в результате умножения  , получают нулевой вектор.
, получают нулевой вектор.
Определение: Нулевым вектором называется вектор, начало и конец которого совпадают, т.е. расположены в одной точке.
Проекция вектора на произвольную ось
Пусть дана ось l и вектор  Проведем через начало вектора
Проведем через начало вектора  прямую,
прямую,
которая параллельна оси l, угол между прямой и вектором  обозначим через
обозначим через  (Рис. 6):
(Рис. 6):
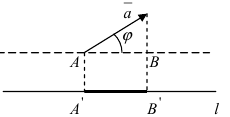
Рис. 6. Проекция вектора на заданную ось.
Из начала и конца вектора  опустим на ось l перпендикуляры, получим отрезок
опустим на ось l перпендикуляры, получим отрезок 
Определение: Проекцией вектора  на ось l называется длина отрезка
на ось l называется длина отрезка  взятая со знаком «+», если угол
взятая со знаком «+», если угол  и со знаком «-», если
и со знаком «-», если  Из рисунка видно, что отрезок
Из рисунка видно, что отрезок  следовательно,
следовательно,  Из этой формулы видно, что при
Из этой формулы видно, что при  величина
величина  а при
а при  величина
величина  При
При  проекция равна нулю, Т. е.
проекция равна нулю, Т. е. 
Проекции обладают свойствами:
– если  то
то 
Декартова система координат и вектора
Определение: Направленная прямая с выбранным началом отсчета и масштабом измерения называется числовой осью.
Определение: Две (три) взаимно перпендикулярные числовые оси называются декартовой системой координат на плоскости (в пространстве).
Рассмотрим декартову систему координат и спроектируем вектор  на координатные оси (Рис. 7).
на координатные оси (Рис. 7). 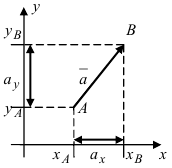
Рис. 7. Проекции вектора на оси декартовой системы координат.
Из рисунка видно, что проекции вектора  на:
на:
- – ось абсцисс (Ох) равна

- – ось ординат (Оу)

(в пространстве – ось аппликат (Oz)  ).
).
Определение: Проекции  называются координатами вектора
называются координатами вектора  Используя теорему Пифагора, найдем длину вектора
Используя теорему Пифагора, найдем длину вектора 

Направляющие косинусы вектора 
Обозначим углы, которые образует вектор  с положительными направлениями координатных осей пространственной декартовой системы отсчета через
с положительными направлениями координатных осей пространственной декартовой системы отсчета через  Тогда
Тогда 
Определение: Величины  называются направляющими косинусами вектора
называются направляющими косинусами вектора 
Вычислив квадрат модуля вектора  найдем соотношение, которое связывает направляющие косинусы вектора
найдем соотношение, которое связывает направляющие косинусы вектора 

Способы задания вектора
- Задаются координаты начальной и конечной точек вектора
 и
и . Тогда
. Тогда 
- Задаются аффинные координаты вектора

- Задаются длина вектора и два любых угла, которые образует вектор
 с какими-либо координатными осями и знак одной из проекций:
с какими-либо координатными осями и знак одной из проекций:
 , но так как по условию
, но так как по условию  , то
, то  . Следовательно,
. Следовательно, 
Деление отрезка в заданном отношении
Пусть в пространственной декартовой системе отсчета даны две точки  и
и  Требуется найти на заданном отрезке
Требуется найти на заданном отрезке  такую точку
такую точку  чтобы
чтобы  где
где  – заданное число (Рис. 8).
– заданное число (Рис. 8). 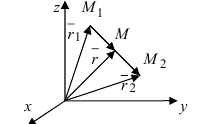
Рис. 8. Деление отрезка в заданном отношении.
Из рисунка видно, что В силу того, что
В силу того, что  Подставляя это равенство в систему и исключая вектор
Подставляя это равенство в систему и исключая вектор  найдем, что
найдем, что  .
.
Отсюда найдем вектор  В проекциях на координатные оси это равенство равносильно системе равенств
В проекциях на координатные оси это равенство равносильно системе равенств  которая определяет деление отрезка в заданном отношении. Если точка
которая определяет деление отрезка в заданном отношении. Если точка  делит отрезок
делит отрезок  пополам
пополам  то система полученных равенств принимает вид известный из курса математики средней школы
то система полученных равенств принимает вид известный из курса математики средней школы 
Понятие базиса векторов
Определение: Любые два (три) неколлинеарных (некомпланарных) вектора образуют базис.
Теорема: Пусть даны два неколлинеарных вектора  и
и  . Любой другой компланарный им вектор может быть единственным образом представлен в виде линейной комбинации векторов и
. Любой другой компланарный им вектор может быть единственным образом представлен в виде линейной комбинации векторов и  :
:  , где
, где  и
и  – вещественные числа.
– вещественные числа.
Доказательство: Пусть векторы  ,
,  и
и  приведены к общему началу (Рис. 9), т.е.
приведены к общему началу (Рис. 9), т.е.
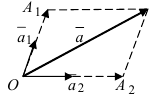
Рис. 9. Разложение вектора по заданному базису.
Из рисунка видно, что  (правило параллелограмма, Лекция .№ 4). Вектор
(правило параллелограмма, Лекция .№ 4). Вектор  коллинеарен вектору
коллинеарен вектору  а вектор
а вектор  вектору
вектору  Следовательно, найдутся 2 вещественных числа
Следовательно, найдутся 2 вещественных числа  такие, что будут выполняться равенства:
такие, что будут выполняться равенства:  Отсюда следует, что
Отсюда следует, что 
Докажем единственность разложения вектора  по базису
по базису  Пусть существуют другие вещественные числа
Пусть существуют другие вещественные числа  такие что
такие что  и пусть хотя бы одна из пар
и пусть хотя бы одна из пар  содержит разные числа, например,
содержит разные числа, например,  Вычитая из первого разложения второе, получим
Вычитая из первого разложения второе, получим

Это означает, что векторы  коллинеарные, что противоречит условию теоремы о том, что они образуют базис. Таким образом, разложение вектора
коллинеарные, что противоречит условию теоремы о том, что они образуют базис. Таким образом, разложение вектора  по базису
по базису  единственно и имеет ВИД
единственно и имеет ВИД 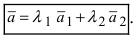 В силу произвольности вектора данная теорема справедлива для любого вектора компланарного с векторами
В силу произвольности вектора данная теорема справедлива для любого вектора компланарного с векторами 
Замечание: С геометрической точки зрения числа  определяют те числа, на которые надо умножить базисные вектора
определяют те числа, на которые надо умножить базисные вектора  чтобы по правилу параллелограмма получить вектор
чтобы по правилу параллелограмма получить вектор  В трехмерном пространстве произвольный вектор
В трехмерном пространстве произвольный вектор  может быть разложен по некомпланарной тройке векторов
может быть разложен по некомпланарной тройке векторов 
 причем единственным образом.
причем единственным образом.
Определение: Ортом направления оси  называется вектор единичной длины в выбранном масштабе измерения, сонаправленный с этой осью
называется вектор единичной длины в выбранном масштабе измерения, сонаправленный с этой осью  Рассмотрим пространственную декартову систему координат, по всем осям (абсцисс – Ох, ординат – Оу и аппликат – Oz) выберем одинаковый масштаб измерения. Вдоль направления каждой оси отложим отрезки единичной длины. Обозначим орты осей:
Рассмотрим пространственную декартову систему координат, по всем осям (абсцисс – Ох, ординат – Оу и аппликат – Oz) выберем одинаковый масштаб измерения. Вдоль направления каждой оси отложим отрезки единичной длины. Обозначим орты осей: – через
– через – через
– через  – через
– через  (Рис. 10):
(Рис. 10): 
Рис. 10. Орты (единичные векторы) декартовой системы координат.
Из Рис. 10 видно, что орты осей имеют следующие проекции:

Так как векторы  некомпланарные, то они образуют базис и любой пространственный вектор может быть единственным образом разложен по этому базису, причем в качестве чисел
некомпланарные, то они образуют базис и любой пространственный вектор может быть единственным образом разложен по этому базису, причем в качестве чисел  выступают проекции вектора:
выступают проекции вектора: 
Векторы в геометрии
Изучая материал этого параграфа, вы узнаете, что векторы используются не только в физике, но и в геометрии. Вы научитесь складывать и вычитать векторы, умножать вектор на число, находить угол между двумя векторами, применять свойства векторов для решения задач.
Понятие вектора в геометрии
Вы знаете много величин, которые определяются своими числовыми значениями: масса, площадь, длина, объем, время, температура и т. д. Такие величины называют скалярными величинами или скалярами.
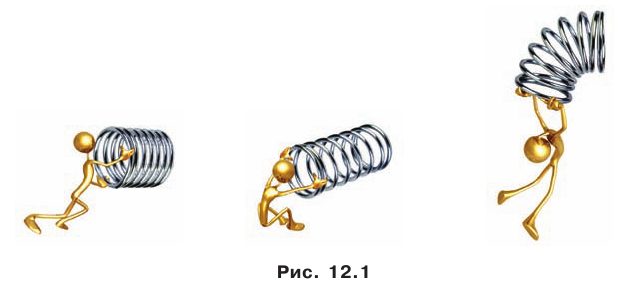
Из курса физики вам знакомы величины, для задания которых недостаточно знать только их числовое значение. Например, если на пружину действует сила 5  то непонятно, будет ли пружина сжиматься или растягиваться (рис. 12.1). Надо еще знать, в каком направлении действует сила.
то непонятно, будет ли пружина сжиматься или растягиваться (рис. 12.1). Надо еще знать, в каком направлении действует сила.
Величины, которые определяются не только числовым значением, но и направлением, называют векторными величинами или векторами.
Сила, перемещение, скорость, ускорение, вес — примеры векторных величин.
Есть векторы и в геометрии.
Рассмотрим отрезок  Если мы договоримся точку
Если мы договоримся точку  считать началом отрезка, а точку
считать началом отрезка, а точку  — его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки
— его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки  к точке
к точке 
Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Вектор с началом в точке  и концом в точке
и концом в точке  обозначают так:
обозначают так:  (читают: «вектор
(читают: «вектор 
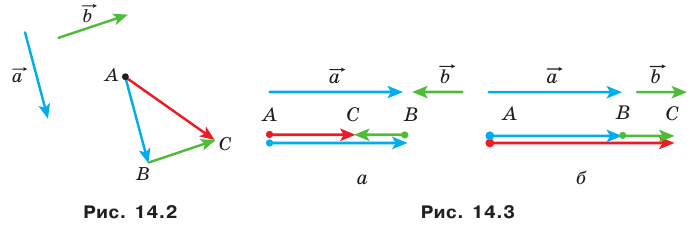
На рисунках вектор изображают отрезком со стрелкой, указывающей его конец. На рисунке 12.2 изображены векторы 
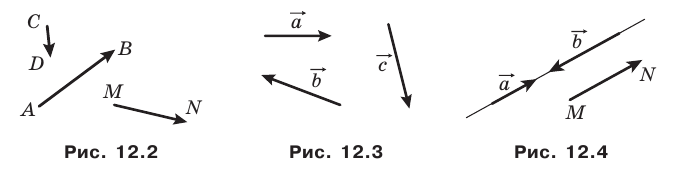 Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 12.3 изображены векторы
Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 12.3 изображены векторы 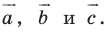
Вектор, у которого начало и конец — одна и та же точка, называют нулевым вектором или нуль-вектором и обозначают  Если начало и конец нулевого вектора — это точка
Если начало и конец нулевого вектора — это точка  то его можно обозначить и так:
то его можно обозначить и так:  На рисунке нулевой вектор изображают точкой.
На рисунке нулевой вектор изображают точкой.
Модулем вектора  называют длину отрезка
называют длину отрезка  Модуль вектора
Модуль вектора  обозначают так:
обозначают так:  а модуль вектора
а модуль вектора  — так:
— так: 
Модуль нулевого вектора считают равным нулю: 
Определение. Ненулевые векторы называют коллинеарными, если они лежат на параллельных прямых или на одной прямой.
Нулевой вектор считают коллинеарным любому вектору.
На рисунке 12.4 изображены коллинеарные векторы  и
и 
Тот факт, что векторы  коллинеарны, обозначают так:
коллинеарны, обозначают так: 
На рисунке 12.5 ненулевые коллинеарные векторы  одинаково направлены. Такие векторы называют сонаправленными и пишут:
одинаково направлены. Такие векторы называют сонаправленными и пишут: 
Если 
Аналогичным свойством обладают и сонаправленные векторы, то есть если  (рис. 12.6).
(рис. 12.6).
На рисунке 12.7 ненулевые коллинеарные векторы  противоположно направлены. Этот факт обозначают так:
противоположно направлены. Этот факт обозначают так: 
Определение. Ненулевые векторы называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны.
На рисунке 12.8 изображены равные векторы  Это обозначают так:
Это обозначают так: 
Равенство ненулевых векторов  означает, что
означает, что  и
и 
Нетрудно доказать, что если  Убедитесь в этом самостоятельно.
Убедитесь в этом самостоятельно.
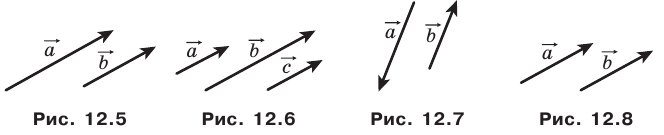
Часто, говоря о векторах, мы не конкретизируем, какая точка является началом вектора. Так, на рисунке 12.9 изображены вектор а и векторы, равные вектору  Каждый из них также принято называть вектором
Каждый из них также принято называть вектором 
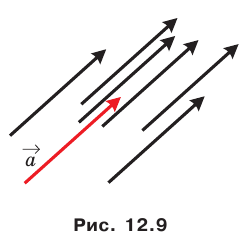
На рисунке 12.10, а изображены вектор  и точка
и точка  Если построен вектор
Если построен вектор  равный вектору
равный вектору  то говорят, что вектор
то говорят, что вектор  отложен от точки
отложен от точки  (рис. 12.10, б).
(рис. 12.10, б).
Покажем, как от произвольной точки  отложить вектор, равный данному вектору
отложить вектор, равный данному вектору 
Если вектор  нулевой, то искомым вектором будет вектор
нулевой, то искомым вектором будет вектор 
Теперь рассмотрим случай, когда  Пусть точка
Пусть точка  лежит на прямой, содержащей вектор
лежит на прямой, содержащей вектор  (рис. 12.11). На этой прямой существуют две точки
(рис. 12.11). На этой прямой существуют две точки  такие, что
такие, что  На указанном рисунке вектор
На указанном рисунке вектор  будет равным вектору
будет равным вектору  Его и следует выбрать.
Его и следует выбрать.
Если точка  не принадлежит прямой, содержащей вектор
не принадлежит прямой, содержащей вектор  то через точку
то через точку  проведем прямую, ей параллельную (рис. 12.12). Дальнейшее построение аналогично уже рассмотренному.
проведем прямую, ей параллельную (рис. 12.12). Дальнейшее построение аналогично уже рассмотренному.
От заданной точки можно отложить только один вектор, равный данному.
Пример №5
Дан четырехугольник  Известно, что
Известно, что  и
и  Определите вид четырехугольника
Определите вид четырехугольника 
Решение:
Из условия  следует, что
следует, что  Следовательно, четырехугольник
Следовательно, четырехугольник  — параллелограмм.
— параллелограмм.
Равенство  означает, что диагонали четырехугольника
означает, что диагонали четырехугольника  равны. А параллелограмм с равными диагоналями — прямоугольник.
равны. А параллелограмм с равными диагоналями — прямоугольник. 
Координаты вектора
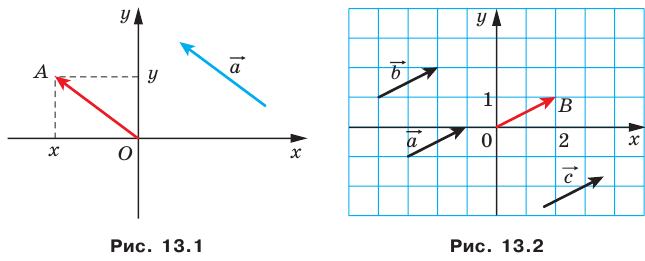
Рассмотрим на координатной плоскости вектор  Отложим от начала координат равный ему вектор
Отложим от начала координат равный ему вектор  (рис. 13.1). Координатами вектора
(рис. 13.1). Координатами вектора  называют координаты точки
называют координаты точки  Запись
Запись  означает, что вектор
означает, что вектор  имеет координаты
имеет координаты 
Числа  называют соответственно первой и второй координатами вектора
называют соответственно первой и второй координатами вектора 
Из определения следует, что равные векторы имеют равные соответствующие координаты. Например, каждый из равных векторов  (рис. 13.2) имеет координаты
(рис. 13.2) имеет координаты 
Справедливо и обратное утверждение: если соответствующие координаты векторов равны, то равны и сами векторы.
Действительно, если отложить такие векторы от начала координат, то их концы совпадут.
Очевидно, что нулевой вектор имеет координаты 
Теорема 13.1. Если точки  соответственно являются началом и концом вектора
соответственно являются началом и концом вектора  то числа
то числа  и
и  равны соответственно первой и второй координатам вектора
равны соответственно первой и второй координатам вектора 
Доказательство: Пусть вектор  равный вектору
равный вектору  имеет координаты
имеет координаты  Докажем, что
Докажем, что 
Если  то утверждение теоремы очевидно.
то утверждение теоремы очевидно.
Пусть  Отложим от начала координат вектор
Отложим от начала координат вектор  равный вектору
равный вектору  Тогда координаты точки
Тогда координаты точки  равны
равны 
Поскольку  то, воспользовавшись результатом задачи 12.32, можем сделать вывод, что середины отрезков
то, воспользовавшись результатом задачи 12.32, можем сделать вывод, что середины отрезков  совпадают. Координаты середин отрезков
совпадают. Координаты середин отрезков  соответственно равны
соответственно равны  Тогда
Тогда

Эти равенства выполняются и тогда, когда точка  совпадает с точкой
совпадает с точкой  или точка
или точка  совпадает с точкой
совпадает с точкой 
Отсюда 
Из формулы расстояния между двумя точками следует, что если вектор  имеет координаты
имеет координаты  то
то
Пример №6
Даны координаты трех вершин параллелограмма 
 Найдите координаты вершины
Найдите координаты вершины 
Решение:
Поскольку четырехугольник  — параллелограмм, то
— параллелограмм, то  Следовательно, координаты этих векторов равны.
Следовательно, координаты этих векторов равны.
Пусть координаты точки  равны
равны  Для нахождения координат векторов
Для нахождения координат векторов  воспользуемся теоремой 13.1.
воспользуемся теоремой 13.1.
Имеем:

Отсюда: 
Ответ: 
Сложение и вычитание векторов
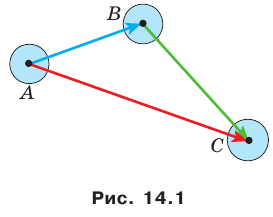
Если тело переместилось из точки  в точку
в точку  а затем из точки
а затем из точки  в точку
в точку  то суммарное перемещение из точки
то суммарное перемещение из точки  в точку
в точку  естественно представить в виде вектора
естественно представить в виде вектора  считая этот вектор суммой векторов
считая этот вектор суммой векторов  то есть
то есть  (рис. 14.1).
(рис. 14.1).
Этот пример подсказывает, как ввести понятие суммы векторов, то есть как сложить два данных вектора  и
и 
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  Далее от точки
Далее от точки  отложим вектор
отложим вектор  равный вектору
равный вектору  Вектор
Вектор  называют суммой векторов
называют суммой векторов  (рис. 14.2) и записывают:
(рис. 14.2) и записывают: 
Описанный алгоритм сложения двух векторов называют правилом треугольника.
Это название связано с тем, что если векторы  не коллинеарны, то точки
не коллинеарны, то точки  являются вершинами треугольника (рис. 14.2).
являются вершинами треугольника (рис. 14.2).
По правилу треугольника можно складывать и коллинеарные векторы. На рисунке 14.3 вектор  равен сумме коллинеарных векторов
равен сумме коллинеарных векторов 
Следовательно, для любых трех точек  выполняется равенство
выполняется равенство  которое выражает правило треугольника для сложения векторов.
которое выражает правило треугольника для сложения векторов.
Теорема 14.1. Если координаты векторов  соответственно равны
соответственно равны  то координаты вектора
то координаты вектора  равны
равны 
Доказательство: Пусть точки  таковы, что
таковы, что  Имеем:
Имеем: 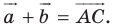 Докажем, что координаты вектора
Докажем, что координаты вектора  равны
равны 
Найдем координаты векторов 

Имеем:

С учетом того, что  получаем:
получаем: 
Замечание. Описывая правило треугольника для нахождения суммы векторов  мы отложили вектор
мы отложили вектор  от произвольной точки. Если точку
от произвольной точки. Если точку  заменить точкой
заменить точкой  то вместо вектора
то вместо вектора  равного сумме векторов
равного сумме векторов  получим некоторый вектор
получим некоторый вектор  Из теоремы 14.1 следует, что координаты векторов
Из теоремы 14.1 следует, что координаты векторов 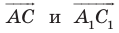 равны
равны  следовательно,
следовательно,  Это означает, что сумма векторов
Это означает, что сумма векторов  не зависит от того, от какой точки отложен вектор
не зависит от того, от какой точки отложен вектор  Свойства сложения векторов аналогичны свойствам сложения чисел.
Свойства сложения векторов аналогичны свойствам сложения чисел.
Для любых векторов  выполняются равенства:
выполняются равенства:
 — переместительное свойство;
— переместительное свойство; — сочетательное свойство.
— сочетательное свойство.
Для доказательства этих свойств достаточно сравнить соответствующие координаты векторов, записанных в правой и левой частях равенств. Сделайте это самостоятельно.
Сумму трех и более векторов находят так: сначала складывают первый и второй векторы, затем складывают полученный вектор с третьим и т. д. Например, 
Из переместительного и сочетательного свойств сложения векторов следует, что при сложении нескольких векторов можно менять местами слагаемые и расставлять скобки любым способом.
В физике часто приходится складывать векторы, отложенные от одной точки. Так, если к телу приложены силы  (рис. 14.4), то равнодействующая этих сил равна сумме
(рис. 14.4), то равнодействующая этих сил равна сумме 
Для нахождения суммы двух неколлинеарных векторов, отложенных от одной точки, удобно пользоваться правилом параллелограмма для сложения векторов.
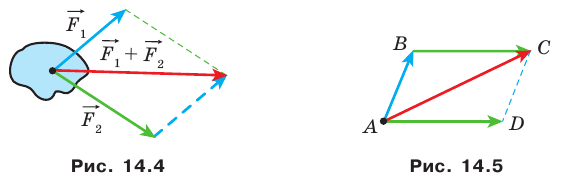 Пусть надо найти сумму неколлинеарных векторов
Пусть надо найти сумму неколлинеарных векторов  (рис. 14.5). Отложим вектор
(рис. 14.5). Отложим вектор  равный вектору
равный вектору  Тогда
Тогда  Поскольку векторы
Поскольку векторы  равны, то четырехугольник
равны, то четырехугольник  — параллелограмм с диагональю
— параллелограмм с диагональю 
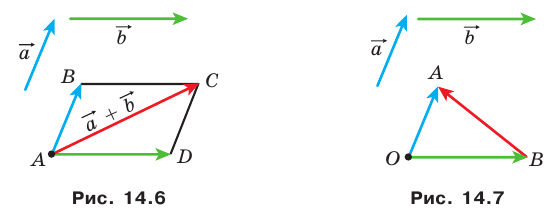
Приведенные соображения позволяют сформулировать правило параллелограмма для сложения неколлинеарных векторов 
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Построим параллелограмм
Построим параллелограмм  (рис. 14.6). Тогда искомая сумма
(рис. 14.6). Тогда искомая сумма  равна вектору
равна вектору 
Определение. Разностью векторов  называют такой вектор
называют такой вектор  сумма которого с вектором
сумма которого с вектором  равна вектору
равна вектору 
Пишут: 
Покажем, как построить вектор, равный разности данных векторов 
От произвольной точки  отложим векторы
отложим векторы  соответственно равные векторам
соответственно равные векторам  (рис. 14.7). Тогда вектор
(рис. 14.7). Тогда вектор  равен разности
равен разности  Действительно,
Действительно,  Следовательно, по определению разности двух векторов
Следовательно, по определению разности двух векторов  то есть
то есть 
На рисунке 14.7 векторы 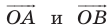 неколлинеарны. Однако описанный алгоритм применим и для нахождения разности кол-линеарных векторов. На рисунке 14.8 вектор
неколлинеарны. Однако описанный алгоритм применим и для нахождения разности кол-линеарных векторов. На рисунке 14.8 вектор  равен разности коллинеарных векторов
равен разности коллинеарных векторов 
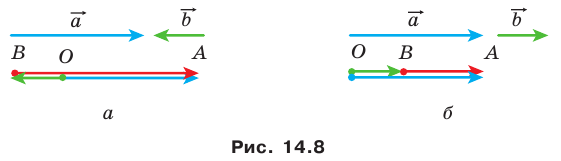 Следовательно, для любых трех точек
Следовательно, для любых трех точек  выполняется равенство
выполняется равенство  которое выражает правило нахождения разности двух векторов, отложенных от одной точки.
которое выражает правило нахождения разности двух векторов, отложенных от одной точки.
Теорема 14.2. Если координаты векторов  соответственно равны
соответственно равны  то координаты вектора
то координаты вектора  равны
равны 
Докажите эту теорему самостоятельно.
Из теоремы 14.2 следует, что для любых векторов  существует единственный вектор
существует единственный вектор  такой, что
такой, что 
Определение. Два ненулевых вектора называют противоположными, если их модули равны и векторы противоположно направлены.
Если векторы  противоположны, то говорят, что вектор
противоположны, то говорят, что вектор  противоположный вектору
противоположный вектору  а вектор
а вектор  противоположный вектору
противоположный вектору 
Вектором, противоположным нулевому вектору, считают нулевой вектор.
Вектор, противоположный вектору  обозначают так:
обозначают так: 
Из определения следует, что противоположным вектору  является вектор
является вектор  Тогда для любых точек
Тогда для любых точек  выполняется равенство
выполняется равенство 
Из правила треугольника следует, что
А из этого равенства следует, что если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Теорема 14.3. Для любых векторов  выполняется равенство
выполняется равенство 
Для доказательства достаточно сравнить соответствующие координаты векторов, записанных в правой и левой частях равенства. Сделайте это самостоятельно.
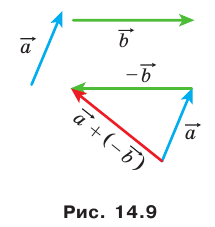
Теорема 14.3 позволяет свести вычитание векторов к сложению: чтобы из вектора  вычесть вектор
вычесть вектор  можно к вектору
можно к вектору  прибавить вектор
прибавить вектор  (рис. 14.9).
(рис. 14.9).
Пример №7
Диагонали параллелограмма  пересекаются в точке
пересекаются в точке  (рис. 14.10). Выразите векторы
(рис. 14.10). Выразите векторы  и
и  через векторы
через векторы 
Решение:
Поскольку точка  — середина отрезков
— середина отрезков  и
и 
Имеем:
Умножение вектора на число
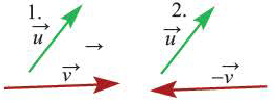
Пусть дан ненулевой вектор  На рисунке 15.1 изображены вектор
На рисунке 15.1 изображены вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Очевидно, что
Очевидно, что 
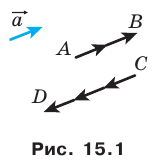
Вектор  обозначают
обозначают  и считают, что он получен в результате умножения вектора
и считают, что он получен в результате умножения вектора  на число 2. Аналогично считают, что вектор
на число 2. Аналогично считают, что вектор  получен в результате умножения вектора
получен в результате умножения вектора  на число -3, и записывают:
на число -3, и записывают: 
Этот пример подсказывает, как ввести понятие «умножение вектора на число».
Определение. Произведением ненулевого вектора  и числа
и числа  отличного от нуля, называют такой вектор
отличного от нуля, называют такой вектор  что:
что:
2) если  если
если 
Пишут: 
Если  то считают, что
то считают, что 
На рисунке 15.2 изображены векторы 
Из определения следует, что
Также из определения следует, что если  то векторы
то векторы  коллинеарны.
коллинеарны.
А если векторы  коллинеарны, то можно ли представить вектор
коллинеарны, то можно ли представить вектор  в виде произведения
в виде произведения  Ответ дает следующая теорема.
Ответ дает следующая теорема.
Теорема 15.1. Если векторы  коллинеарны и
коллинеарны и  то существует такое число
то существует такое число  что
что 
Доказательство: Если  то при
то при  получаем, что
получаем, что  Если
Если  то или
то или 
1) Пусть  Рассмотрим вектор
Рассмотрим вектор  Поскольку
Поскольку  следовательно,
следовательно,  Кроме того,
Кроме того,  Таким образом, векторы
Таким образом, векторы  сонаправлены и их модули равны. Отсюда
сонаправлены и их модули равны. Отсюда 
2) Пусть  Рассмотрим вектор
Рассмотрим вектор  Для этого случая завершите доказательство самостоятельно.
Для этого случая завершите доказательство самостоятельно. 
Теорема 15.2. Если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Доказательство: Если  то утверждение теоремы очевидно.
то утверждение теоремы очевидно.
Пусть  Рассмотрим вектор
Рассмотрим вектор  . Покажем, что
. Покажем, что  Имеем:
Имеем:

Отложим от начала координат векторы  равные соответственно векторам
равные соответственно векторам  Поскольку прямая
Поскольку прямая  проходит через начало координат, то ее уравнение имеет вид
проходит через начало координат, то ее уравнение имеет вид  Этой прямой принадлежит точка
Этой прямой принадлежит точка  Тогда
Тогда  Отсюда
Отсюда 
Следовательно, точка  также принадлежит прямой
также принадлежит прямой  поэтому векторы
поэтому векторы  коллинеарны, то есть
коллинеарны, то есть 
При  числа
числа  имеют одинаковые знаки (или оба равны нулю). Таким же свойством обладают числа
имеют одинаковые знаки (или оба равны нулю). Таким же свойством обладают числа  Следовательно, при
Следовательно, при  точки
точки  лежат в одной координатной четверти (или на одном координатном луче), поэтому векторы
лежат в одной координатной четверти (или на одном координатном луче), поэтому векторы  сонаправлены (рис. 15.3), то есть
сонаправлены (рис. 15.3), то есть  При
При  векторы
векторы  будут противоположно направленными, то есть
будут противоположно направленными, то есть  Следовательно, мы получили, что
Следовательно, мы получили, что 
Следствие 1. Векторы  коллинеарны.
коллинеарны.
Следствие 2. Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 

С помощью теоремы 15.2 можно доказать такие свойства умножения вектора на число.
Для любых чисел  и любых векторов
и любых векторов  выполняются равенства:
выполняются равенства:
 — сочетательное свойство;
— сочетательное свойство; — первое распределительное свойство;
— первое распределительное свойство; — второе распределительное свойство.
— второе распределительное свойство.
Для доказательства этих свойств достаточно сравнить соответствующие координаты векторов, записанных в правых и левых частях равенств. Сделайте это самостоятельно.
Эти свойства позволяют преобразовывать выражения, содержащие сумму векторов, разность векторов и произведение векторов на число, аналогично тому, как мы преобразовываем алгебраические выражения. Например,

Пример №8
Докажите, что если  то точки
то точки  и
и  лежат на одной прямой.
лежат на одной прямой.
Решение:
Из условия следует, что векторы  коллинеарны. Кроме того, эти векторы отложены от одной точки
коллинеарны. Кроме того, эти векторы отложены от одной точки  Следовательно, точки
Следовательно, точки  лежат на одной прямой.
лежат на одной прямой. 
Пример №9
Точка  — середина отрезка
— середина отрезка  — произвольная точка (рис. 15.4). Докажите, что
— произвольная точка (рис. 15.4). Докажите, что 
Решение:
Применяя правило треугольника, запишем:
Сложим эти два равенства:

Поскольку векторы  противоположны, то
противоположны, то  Имеем:
Имеем: 
Отсюда 
Пример №10
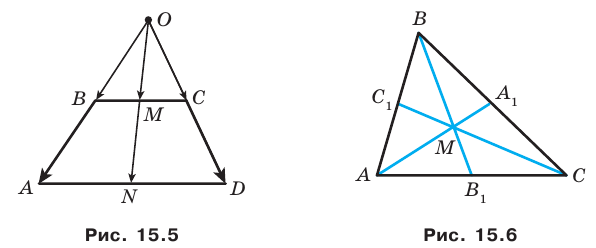
Докажите, что середины оснований трапеции и точка пересечения продолжение ее боковых сторон лежат на одной прямой.
Решение:
Пусть точки  — середины оснований
— середины оснований  и
и  трапеции
трапеции  — точка пересечения прямых
— точка пересечения прямых  (рис. 15.5).
(рис. 15.5).
Применяя ключевую задачу 2, запишем: 
Поскольку  где
где  —некоторые числа.
—некоторые числа.
Поскольку  Следовательно,
Следовательно, 
Имеем: 
Из ключевой задачи 1 следует, что точки  лежат на одной прямой.
лежат на одной прямой. 
Пример №11
Докажите, что если  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  то
то 
Решение:
Пусть отрезки  — медианы треугольника
— медианы треугольника  (рис. 15.6). Имеем:
(рис. 15.6). Имеем:
Отсюда 
Из свойства медиан треугольника следует, что 
Тогда  Аналогично
Аналогично 
Отсюда

Применение векторов
Применяя векторы к решению задач, часто используют следующую лемму.
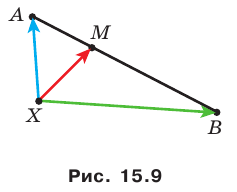
Лемма. Пусть  — такая точка отрезка
— такая точка отрезка  что
что  (рис. 15.9). Тогда для любой точки
(рис. 15.9). Тогда для любой точки  выполняется равенство
выполняется равенство

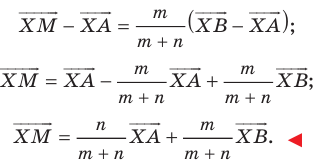
Доказательство: Имеем:

Поскольку  то
то
Запишем: 
Поскольку  то имеем:
то имеем:
Заметим, что эта лемма является обобщением ключевой задачи 2 п. 15.
Пример №12
Пусть  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  — произвольная точка (рис. 15.10). Докажите, что
— произвольная точка (рис. 15.10). Докажите, что

Решение:
Пусть точка  — середина отрезка
— середина отрезка  Имеем:
Имеем:  Тогда, используя лемму, можно записать:
Тогда, используя лемму, можно записать:

Докажем векторное равенство, связывающее две замечательные точки треугольника.
точки треугольника.
Теорема. Если точка  — ортоцентр треугольника
— ортоцентр треугольника  а точка
а точка  — центр его описанной окружности, то
— центр его описанной окружности, то

Доказательство: Для прямоугольного треугольника равенство  очевидно.
очевидно.
Пусть треугольник  не является прямоугольным. Опустим из точки
не является прямоугольным. Опустим из точки  перпендикуляр
перпендикуляр  на сторону
на сторону  треугольника
треугольника  (рис. 15.11). В курсе геометрии 8 класса было доказано, что
(рис. 15.11). В курсе геометрии 8 класса было доказано, что 
На луче  отметим точку
отметим точку  такую, что
такую, что  Тогда
Тогда  Поскольку
Поскольку  то четырехугольник
то четырехугольник  — параллелограмм.
— параллелограмм.
По правилу параллелограмма 
Поскольку точка  является серединой отрезка
является серединой отрезка  то в четырехугольнике
то в четырехугольнике  диагонали точкой пересечения делятся пополам.
диагонали точкой пересечения делятся пополам. 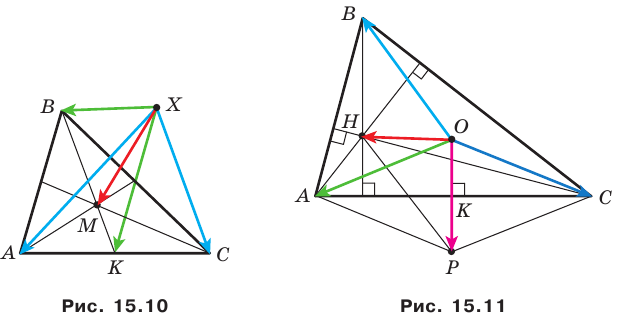
Следовательно, этот четырехугольник — параллелограмм. Отсюда 
Имеем: 
Обратимся к векторному равенству  где
где  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  Так как
Так как  — произвольная точка, то равенство остается справедливым, если в качестве точки
— произвольная точка, то равенство остается справедливым, если в качестве точки  выбрать точку
выбрать точку  — центр описанной окружности треугольника
— центр описанной окружности треугольника 
Имеем: 
Учитывая равенство  получаем:
получаем: 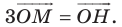
Это равенство означает, что точки  лежат на одной прямой, которую называют прямой Эйлера. Напомним, что это замечательное свойство было доказано в курсе геометрии 8 класса, но другим способом.
лежат на одной прямой, которую называют прямой Эйлера. Напомним, что это замечательное свойство было доказано в курсе геометрии 8 класса, но другим способом.
Скалярное произведение векторов
Пусть  — два ненулевых и несонаправленных вектора (рис. 16.1). От произвольной точки
— два ненулевых и несонаправленных вектора (рис. 16.1). От произвольной точки  отложим векторы
отложим векторы  соответственно равные векторам
соответственно равные векторам  Величину угла
Величину угла  будем называть углом между векторами
будем называть углом между векторами  и
и 
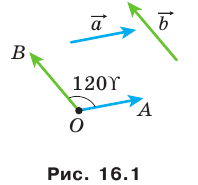
Угол между векторами  обозначают так:
обозначают так:  Например, на рисунке 16.1
Например, на рисунке 16.1  а на рисунке 16.2
а на рисунке 16.2 
Если векторы  сонаправлены, то считают, что
сонаправлены, то считают, что  Если хотя бы один из векторов
Если хотя бы один из векторов  нулевой, то так же считают, что
нулевой, то так же считают, что 
Следовательно, для любых векторов  имеет место неравенство:
имеет место неравенство:

Векторы  называют перпендикулярными, если угол между ними равен
называют перпендикулярными, если угол между ними равен  Пишут:
Пишут: 
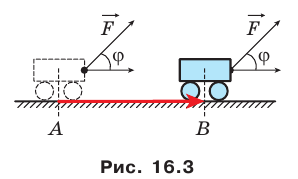
Вы умеете складывать и вычитать векторы, умножать вектор на число. Также из курса физики вы знаете, что если под действием постоянной силы  тело переместилось из точки
тело переместилось из точки  в точку
в точку  (рис. 16.3), то совершенная механическая работа равна
(рис. 16.3), то совершенная механическая работа равна  где
где 
Изложенное выше подсказывает, что целесообразно ввести еще одно действие над векторами.
Определение. Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними. Скалярное произведение векторов  обозначают так:
обозначают так: 
Имеем:
Если хотя бы один из векторов  нулевой, то очевидно, что
нулевой, то очевидно, что 
Пусть 
Скалярное произведение  называют скалярным квадратом вектора
называют скалярным квадратом вектора  и обозначают
и обозначают 
Мы получили, что  то есть скалярный квадрат, вектора равен квадрату его модуля.
то есть скалярный квадрат, вектора равен квадрату его модуля.
Теорема 16.1. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны.
Доказательство: Пусть  Докажем, что
Докажем, что 
Имеем:  Отсюда
Отсюда 
Пусть теперь  Докажем, что
Докажем, что 
Запишем:  Поскольку
Поскольку 
 Отсюда
Отсюда 
Теорема 16.2. Скалярное произведение векторов  можно вычислить по формуле
можно вычислить по формуле
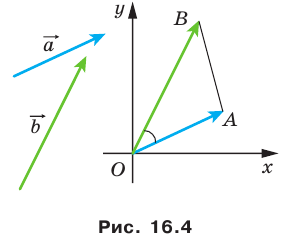
Доказательство: Сначала рассмотрим случай, когда векторы  и
и  неколлинеарны.
неколлинеарны.
Отложим от начала координат векторы  соответственно равные векторам
соответственно равные векторам  (рис. 16.4). Тогда
(рис. 16.4). Тогда

Применим теорему косинусов к треугольнику 

Отсюда 
Поскольку 
Кроме того,  Отсюда
Отсюда 
Имеем:  Воспользовавшись формулой нахождения модуля вектора по его координатам, запишем:
Воспользовавшись формулой нахождения модуля вектора по его координатам, запишем:

Упрощая выражение, записанное в правой части последнего равенства, получаем:
Рассмотрим случай, когда векторы  коллинеарны.
коллинеарны.
Если  то очевидно, что
то очевидно, что 
Если  то существует такое число
то существует такое число  то есть
то есть 
Если  Имеем:
Имеем:

Случай, когда  рассмотрите самостоятельно.
рассмотрите самостоятельно. 
Следствие. Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле
Доказательство: Из определения скалярного произведения векторов  следует, что
следует, что  Воспользовавшись теоремой 16.2 и формулой нахождения модуля вектора по его координатам, получаем формулу
Воспользовавшись теоремой 16.2 и формулой нахождения модуля вектора по его координатам, получаем формулу 
С помощью теоремы 16.2 легко доказать следующие свойства скалярного произведения векторов.
Для любых векторов  и любого числа
и любого числа  справедливы равенства:
справедливы равенства:
 — переместительное свойство;
— переместительное свойство;
 — сочетательное свойство;
— сочетательное свойство;
 — распределительное свойство.
— распределительное свойство.
Для доказательства этих свойств достаточно выразить через координаты векторов скалярные произведения, записанные в правых и левых частях равенств, и сравнить их. Сделайте это самостоятельно.
Эти свойства вместе со свойствами сложения векторов и умножения вектора на число позволяют преобразовывать выражения, содержащие скалярное произведение векторов, аналогично тому, как мы преобразовываем алгебраические выражения.
Например, 

Пример №13
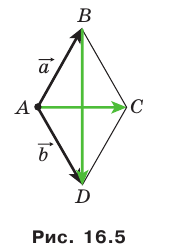
С помощью векторов докажите, что диагонали ромба перпендикулярны.
Решение:
На рисунке 16.5 изображен ромб  Пусть
Пусть  Очевидно, что
Очевидно, что  По правилу параллелограмма имеем:
По правилу параллелограмма имеем: 
Отсюда

Следовательно, 
Пример №14
Известно, что 
Найдите 
Решение:
Поскольку скалярный квадрат вектора равен квадрату его модуля, то  Отсюда
Отсюда
Ответ: 
Пример №15
В треугольнике  известно, что
известно, что  Найдите медиану
Найдите медиану 
Решение. Применяя ключевую задачу 2 п. 15, запишем: 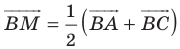 (рис. 16.6).
(рис. 16.6).
Отсюда:
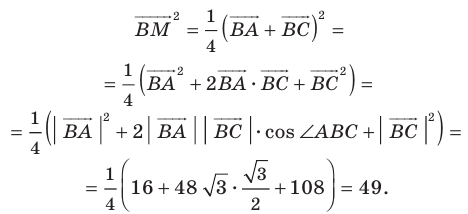
Следовательно, 
Ответ: 
Справочный материал
Вектор
Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Коллинеарные векторы
Ненулевые векторы называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
Равные векторы
Ненулевые векторы называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны. Равные векторы имеют равные соответствующие координаты. Если соответствующие координаты векторов равны, то равны и сами векторы.
Координаты вектора
Если точки  соответственно являются началом и концом вектора
соответственно являются началом и концом вектора  то числа
то числа  равны соответственно первой и второй координатам вектора
равны соответственно первой и второй координатам вектора 
Модуль вектора
Если вектор  имеет координаты
имеет координаты 
Правила сложения двух векторов
Правило треугольника
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  а от точки
а от точки  — вектор
— вектор  равный вектору
равный вектору  Вектор
Вектор  — сумма векторов
— сумма векторов  Для любых трех точек
Для любых трех точек  выполняется равенство
выполняется равенство 
Правило параллелограмма
Отложим от произвольной точки  вектор
вектор  равный вектору
равный вектору  и вектор
и вектор  равный вектору
равный вектору  Построим параллелограмм
Построим параллелограмм  Тогда вектор
Тогда вектор  — сумма векторов
— сумма векторов 
Координаты суммы векторов
Если координаты векторов  соответственно равны
соответственно равны  и
и  то координаты вектора
то координаты вектора  равны
равны 
Свойства сложения векторов
Для любых векторов  выполняются равенства:
выполняются равенства:
 — переместительное свойство;
— переместительное свойство; — сочетательное свойство.
— сочетательное свойство.
Разность векторов
Разностью векторов  называют такой вектор
называют такой вектор  сумма которого с вектором
сумма которого с вектором  равна вектору
равна вектору 
Для любых трех точек  выполняется равенство
выполняется равенство 
Координаты разности векторов
Если координаты векторов  соответственно равны
соответственно равны  и
и  то координаты вектора
то координаты вектора  равны
равны 
Противоположные векторы
Два ненулевых вектора называют противоположными, если их модули равны и векторы противоположно направлены. Для любых точек  выполняется равенство
выполняется равенство 
Умножение вектора на число
Произведением ненулевого вектора  и числа
и числа  отличного от нуля, называют такой вектор
отличного от нуля, называют такой вектор  что:
что:
2) если 
Если  то считают, что
то считают, что 
Если вектор  имеет координаты
имеет координаты  то вектор
то вектор  имеет координаты
имеет координаты 
Свойства коллинеарных векторов
Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 
Если векторы  коллинеарны, причем
коллинеарны, причем  то существует такое число
то существует такое число 
Свойства умножения вектора на число
Для любых чисел  и любых векторов
и любых векторов  справедливы равенства:
справедливы равенства:
 — сочетательное свойство;
— сочетательное свойство; — первое распределительное свойство;
— первое распределительное свойство; — второе распределительное свойство.
— второе распределительное свойство.
Скалярное произведение векторов
Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними:
 Скалярное произведение векторов
Скалярное произведение векторов  можно вычислить по формуле
можно вычислить по формуле 
Свойства скалярного произведения
Для любых векторов  и любого числа
и любого числа  выполняются равенства:
выполняются равенства:
 — переместительное свойство;
— переместительное свойство; — сочетательное свойство;
— сочетательное свойство; — распределительное свойство.
— распределительное свойство.
Условие перпендикулярности двух векторов
Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны.
Косинус угла между двумя векторами
Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле 
Векторы в аналитической геометрии
Понятие вектора широко применяется в экономике, математике, физике и других науках, при этом одинаково широко используется как алгебраическая концепция изложения векторного анализа, так и его геометрическая интерпретация, в рамках которой различаются величины двух видов: скалярные и векторные.
Скалярной величиной или скаляром называется величина, которая полностью определяется одним числом, выражающим отношение этой величины к соответствующей единице измерения, например, цена, количество проданного товара, стоимость и т.д.
Векторной величиной или вектором называется величина, для задания которой кроме численного значения необходимо указать и ее направление в пространстве, например, изменение темпов производства (рост или падение), колебание курса акций на бирже и т.д.
Векторная величина графически обычно изображается как связанный вектор или направленный отрезок, т.е. отрезок прямой, у которого указано, какая из ограничивающих точек является его началом, а какая концом. Но в отличие от направленного отрезка, для описания которого необходимо указать начальную точку, длину и направление, свободный вектор или просто вектор представляет собой множество всех эквивалентных между собой связанных векторов и вполне характеризуется:
- направлением;
- длиной (модулем).
Для задания такого множества достаточно указать какой-либо один из связанных векторов этого множества – представитель вектора, в качестве которого обычно выбирается связанный вектор с началом, совпадающим с началом координат.
Вектор обозначается одной маленькой буквой со стрелкой сверху, например,  или двумя буквами со стрелкой
или двумя буквами со стрелкой  , где точка А есть начало вектора (его точка приложения), а В – его конец.
, где точка А есть начало вектора (его точка приложения), а В – его конец.
Длина вектора называется его модулем, обозначается или
или 
и равна длине любого его представителя, т.е. расстоянию между начальной и конечной точками связного вектора . Вектор, длина которого равна нулю, называется нуль-вектором и обозначается  .
.
Два вектора называются равными, если:
- равны их длины;
- они параллельны;
- они направлены в одну сторону.
Иными словами, равные векторы получаются один из другого параллельным переносом в пространстве.
Векторы называются коллинеарными, если они расположены на одной или на параллельных прямых, и компланарными, если они лежат на одной или на параллельных плоскостях.
Вектор, длина которого равна единице, называется единичным вектором или ортом. Орт обозначатся  .
.
Линейные операции над векторами
Сложение вектора производится по правилу параллелограмма:
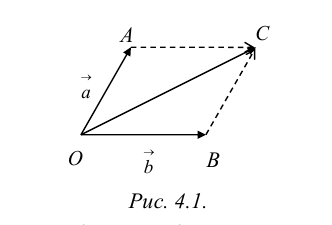
Поскольку вектор  равен
равен  , то можно дать другое правило нахождения суммы
, то можно дать другое правило нахождения суммы  (правило треугольника): суммой векторов
(правило треугольника): суммой векторов  является вектор, идущий из начала
является вектор, идущий из начала  в конец если вектор приложен к концу вектора
в конец если вектор приложен к концу вектора  , т.е.:
, т.е.:
 (4-1)
(4-1)
Это правило распространяется на любое число слагаемых: если векторы  образуют ломаную OAB…KL, то суммой этих векторов является вектор
образуют ломаную OAB…KL, то суммой этих векторов является вектор  , замыкающий эту ломаную, т.е.:
, замыкающий эту ломаную, т.е.:
 (4-2)
(4-2)
В частности, если ломаная замыкается, т.е. O = L, то сумма ее звеньев равна нуль-вектору  .
.
Сложение векторов подчиняется обычным законам сложения -сочетательному и переместительному, а также обладает обратной операцией – вычитанием.
Разностью двух векторов , отложенных от одной точки О является вектор, направленный из конца вычитаемого вектора в конец уменьшаемого вектора , т.е.  (Рис. 4.2.). Это правило следует из формулы (1): т.к.
(Рис. 4.2.). Это правило следует из формулы (1): т.к.  .
.
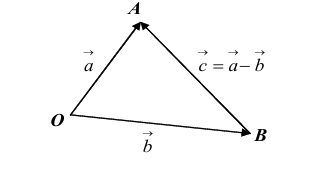 Рис. 4.2.
Рис. 4.2.
Векторы можно не только складывать и вычитать, но и умножать на числа (скаляры).
Вектор  равен
равен  , где
, где  – некоторое число, если:
– некоторое число, если:
 коллинеарен ;
коллинеарен ;- длина вектора отличается от длины вектора в
 раз, т.е.
раз, т.е. 
- при
 направлены в одну сторону, при
направлены в одну сторону, при  – в разные.
– в разные.
Произведение вектора на скаляр обладает следующими свойствами:
Проекция вектора на ось
Пусть даны ось и вектор
и вектор  . Проектируя начало и конец вектора на ось получим на ней вектор
. Проектируя начало и конец вектора на ось получим на ней вектор  . Проекцией
. Проекцией вектора
вектора  на ось называется число, равное длине вектора , взятой со знаком плюс или минус в зависимости от того, направлен ли вектор , в ту же сторону, что и ось (. или в противоположную.
на ось называется число, равное длине вектора , взятой со знаком плюс или минус в зависимости от того, направлен ли вектор , в ту же сторону, что и ось (. или в противоположную.
Проекция вектора на ось (: обозначается ).
Свойства проекций:
 – угол между вектором
– угол между вектором  и осью
и осью  ;
;
Пусть – произвольная конечная система векторов;
– произвольная конечная система векторов;  произвольная система действительных чисел.
произвольная система действительных чисел.
Вектор  называется линейной комбинацией векторов этой системы.
называется линейной комбинацией векторов этой системы.
Из свойства проекций следует, что:

Линейная зависимость векторов
Говорят, что векторы линейно независимы, если из равенства:
 (4-3)
(4-3)
следует, что  .
.
В противном случае векторы  , называются линейно зависимыми. Если какой-нибудь вектор можно представить в виде
, называются линейно зависимыми. Если какой-нибудь вектор можно представить в виде  как, то говорят, что вектор
как, то говорят, что вектор  линейно выражается через векторы
линейно выражается через векторы  .
.
Теорема. Векторы  линейно зависимы тогда и только тогда, когда, по крайней мере, один из них линейно выражается через остальные.
линейно зависимы тогда и только тогда, когда, по крайней мере, один из них линейно выражается через остальные.
Следствие. Если векторы линейно независимы, то ни один из них нельзя выразить через остальные; в частности , ни один из них не может быть нулевым.
Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой. Любые два неколлинеарных вектора  линейно независимы. В самом деле, предположим, неколлинсарные векторы
линейно независимы. В самом деле, предположим, неколлинсарные векторы  линейно зависимы. Тогда, по предыдущей теореме, один из них, например
линейно зависимы. Тогда, по предыдущей теореме, один из них, например ? линейно выражается через второй, т.е.
? линейно выражается через второй, т.е.  , а это противоречит неколлинеарности . Следовательно, – линейно независимы.
, а это противоречит неколлинеарности . Следовательно, – линейно независимы.
Пусть неколлинеарные векторы,  – произвольный вектор компланарный векторам . Отложим векторы
– произвольный вектор компланарный векторам . Отложим векторы  и от одной точки О, т.е. построим
и от одной точки О, т.е. построим (Рис.4.3).
(Рис.4.3).
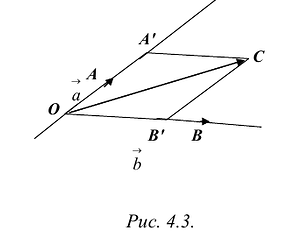
Из параллелограмма  видно, что:
видно, что:

Следовательно, любые три компланарных вектора  линейно зависимы.
линейно зависимы.
Любые три некомпланарных вектора  линейно независимы.
линейно независимы.
Если предположить, что три некомпланарных вектора  линейно зависимы, то один из них, например , линейно выражается через , т.е.
линейно зависимы, то один из них, например , линейно выражается через , т.е.  а это говорит о том, что три вектора
а это говорит о том, что три вектора  лежат в одной плоскости, что противоречит условию.
лежат в одной плоскости, что противоречит условию.
Три вектора линейно зависимы тогда и только тогда, когда определитель, составленный из их координат, равен нулю.
Пусть векторы в некотором базисе имеют координаты
 соответственно. Тогда векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. Значит, векторы линейно зависимы тогда и только тогда, когда существуют числа
соответственно. Тогда векторы линейно зависимы тогда и только тогда, когда линейно зависимы их координатные столбцы. Значит, векторы линейно зависимы тогда и только тогда, когда существуют числа  , неравные одновременно нулю, что выполняется равенство:
, неравные одновременно нулю, что выполняется равенство:

Линейная зависимость означает, что существует ненулевой набор коэффициентов  такой, что:
такой, что:
 4)
4)
Если один из векторов, например,  ,, является нулевым, то система окажется линейно зависимой, т.к. равенство (4.4) будет выполнено при
,, является нулевым, то система окажется линейно зависимой, т.к. равенство (4.4) будет выполнено при  .
.
Теорема, Векторы линейно зависимы тогда и только тогда, когда один из векторов является линейной комбинацией остальных.
Базис. Координаты вектора в базисе
Определим понятие базиса на прямой, плоскости и в пространстве.
Базисом на прямой называется любой ненулевой вектор на
на
этой прямой. Любой другой вектор  , коллинеарный данной прямой,
, коллинеарный данной прямой,
может быть выражен через вектор в виде  .
.
Базисом на плоскости называются любых два линейно независимых вектора  этой плоскости, взятые в определенном порядке. Любой третий вектор
этой плоскости, взятые в определенном порядке. Любой третий вектор  , компланарный плоскости, на которой выбран базис
, компланарный плоскости, на которой выбран базис  , может быть представлен в виде
, может быть представлен в виде  .
.
Базисом в трехмерном пространстве называются любые три некомпланарных вектора  взятые в определенном порядке. Такой базис обозначается
взятые в определенном порядке. Такой базис обозначается  . Пусть – произвольный вектор трехмерного пространства, в котором выбран базис . Тогда существуют числа
. Пусть – произвольный вектор трехмерного пространства, в котором выбран базис . Тогда существуют числа  такие, что:
такие, что:
 (4.5)
(4.5)
Коэффициенты называются координатами вектора в базисе , а формула (4.5) есть разложение вектора с по данному базису.
Координаты вектора в заданном базисе определяются однозначно. Введение координат для векторов позволяет сводить различные соотношения между векторами к числовым соотношениям между их координатами. Координаты линейной комбинации векторов равны таким же линейным комбинациям соответствующих координат этих векторов.
Декартовы прямоугольные координаты в пространстве. Координаты точек. Координаты векторов. Деление отрезка в данном отношении
Декартова прямоугольная система координат в пространстве определяется заданием единицы масштаба для измерения длин и трех пересекающихся в точке взаимно перпендикулярных осей, первая из которых называется осью абсцисс (Ох), вторая – осью ординат (Оу), третья – осью аппликат (Oz); точка О – начало координат (Рис. 4.4).
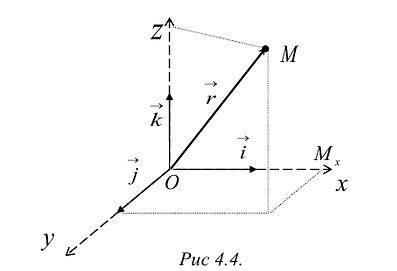
Положение координат осей можно задать с помощью единичных векторов  направленных по осям Ох, Оу, Oz. Векторы называются основными или базисными ортами и определяют базис
направленных по осям Ох, Оу, Oz. Векторы называются основными или базисными ортами и определяют базис  в трехмерном пространстве.
в трехмерном пространстве.
Пусть в пространстве дана точка М. Проектируя ее на ось Ох, получим точку Мх. Первой координатой х или абсциссой точки М называется длина вектора  , взятая со знаком плюс, если
, взятая со знаком плюс, если  направлен в ту же сторону, что и вектор
направлен в ту же сторону, что и вектор  , и со знаком минус -если в противоположную. Аналогично проектируя точку М на оси Оу и Oz, определим ее ординату у и аппликату z. Тройка чисел (х, у, z) взаимно однозначно соответствует точке М .
, и со знаком минус -если в противоположную. Аналогично проектируя точку М на оси Оу и Oz, определим ее ординату у и аппликату z. Тройка чисел (х, у, z) взаимно однозначно соответствует точке М .
Система координат называется правой, если вращение от оси Ох к оси Оу в ближайшую сторону видно с положительного направления оси Oz совершающимися против часовой стрелки, и левой, если вращение от оси Ох к оси Оу в ближайшую сторону видно совершающимися по часовой стрелке.
Вектор  , направленный из начала координат в точку М(х, у, z) называется радиус-вектором точки М, т.е.:
, направленный из начала координат в точку М(х, у, z) называется радиус-вектором точки М, т.е.:
 (4.6)
(4.6)
Если даны координаты точек  , то координаты вектора АВ получаются вычитанием из координат его конца В координат начала или
, то координаты вектора АВ получаются вычитанием из координат его конца В координат начала или  .
.
Следовательно, по формуле (4.5):
При сложении (вычитании) векторов их координаты складываются (вычитаются), при умножении вектора на число все его координаты умножаются на это число.
Длина вектора  равна квадратному корню из суммы квадратов его координат.
равна квадратному корню из суммы квадратов его координат.
 (4.8)
(4.8)
Длина вектора , заданного координатами своих концов, т.е. расстояние между точками А и В вычисляется по формуле:
, заданного координатами своих концов, т.е. расстояние между точками А и В вычисляется по формуле:
 (4.9)
(4.9)
Если  коллинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
коллинеарны, то они отличаются друг от друга скалярным множителем. Следовательно, у коллинеарных векторов координаты пропорциональны:
 (4.10)
(4.10)
Пусть точка М(х, у, z) делит отрезок между точками  и
и  в отношении
в отношении  , тогда радиус-вектор точки М выражается через радиусы-векторы
, тогда радиус-вектор точки М выражается через радиусы-векторы  его концов по формуле:
его концов по формуле:
Отсюда получаются координатные формулы:

В частности, если точка М делит отрезок  пополам, то
пополам, то

Направляющие косинусы
Пусть дан вектор  . Единичный вектор того же направления, что и
. Единичный вектор того же направления, что и  (орт вектора
(орт вектора  ) находится по формуле:
) находится по формуле:
Пусть ось  образует с осями координат углы
образует с осями координат углы . Направляющими косинусами оси называются косинусы этих углов:
. Направляющими косинусами оси называются косинусы этих углов:  . Если направление задано единичным вектором
. Если направление задано единичным вектором  , то направляющие косинусы служат его координатами, т.е.:
, то направляющие косинусы служат его координатами, т.е.:

Направляющие косинусы связаны между собой соотношением: 
Если направление задано произвольным вектором , то находят орт этого вектора и, сравнивая его с выражением для единичного вектора , получают:
Скалярное произведение
Скалярными произведением  двух векторов
двух векторов  называется число, равное произведению их длин на косинус угла между ними
называется число, равное произведению их длин на косинус угла между ними 
Скалярное произведение обладает следующими свойствами:
4. Если – ненулевые векторы, то  тогда и только тогда, когда эти векторы перпендикулярны. Если
тогда и только тогда, когда эти векторы перпендикулярны. Если  , то угол между а и Ь– острый, если
, то угол между а и Ь– острый, если  , то угол – тупой;
, то угол – тупой;
5. Скалярный квадрат вектора а равен квадрату его длины, т.е.
Следовательно, 
Геометрический смысл скалярного произведения: скалярное произведение вектора на единичный вектор  равно проекции вектора
равно проекции вектора  на направление, определяемое
на направление, определяемое  , т.е.
, т.е.  .
.
Из определения скалярного произведения вытекает следующая таблица умножения ортов  :
:
Если векторы заданы своими координатами  и
и
 , то, перемножая эти векторы скалярно и используя таблицу умножения ортов, получим выражение скалярного произведения
, то, перемножая эти векторы скалярно и используя таблицу умножения ортов, получим выражение скалярного произведения  через координаты векторов:
через координаты векторов:
Векторное произведение
Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  длина и направление которого определяется условиями:
длина и направление которого определяется условиями:


3. направлен так, что кратчайший поворот от  виден из его конца совершающимся против часовой стрелки.
виден из его конца совершающимся против часовой стрелки.
Векторное произведение обладает следующими свойствами:  4. Векторное произведение равно нулю (нуль вектору) тогда и только тогда, когда коллинсарны. В частности
4. Векторное произведение равно нулю (нуль вектору) тогда и только тогда, когда коллинсарны. В частности для любого вектора ;
для любого вектора ;
5. Если неколлинеарны, то модуль векторного произведения равен площади параллелограмма S построенного на этих векторах, как на сторонах.
Из первых трех свойств следует, что векторное умножение суммы векторов на сумму векторов подчиняется обычным правилам перемножения многочленов. Надо только следить за тем, чтобы порядок следования множителей не менялся.
Основные орты перемножаются следующим образом: 
Если , то с учетом свойств векторного произведения векторов, можно вывести правило вычисления координат векторного произведения по координатам векторов-сомножителей :
, то с учетом свойств векторного произведения векторов, можно вывести правило вычисления координат векторного произведения по координатам векторов-сомножителей :
Если принять во внимание полученные выше правила перемножения ортов, то:
 (4.11)
(4.11)
Более компактную форму записи выражения для вычисления координат векторного произведения двух векторов можно построить, если ввести понятие определителя матрицы.
Рассмотрим частный случай, когда вектора  принадлежат плоскости Оху, т.е. их можно представить как
принадлежат плоскости Оху, т.е. их можно представить как и
и 
Если координаты векторов записать в виде таблицы следующим образом:  , то можно сказать, что из них сформирована квадратная матрица второго порядка, т.е. размером 2×2, состоящая из двух строк и двух столбцов. Каждой квадратной матрице ставится в соответствие число, которое вычисляется из элементов матрицы по определенным правилам и называется определителем. Определитель матрицы второго порядка равен разности произведений элементов главной диагонали и побочной диагонали:
, то можно сказать, что из них сформирована квадратная матрица второго порядка, т.е. размером 2×2, состоящая из двух строк и двух столбцов. Каждой квадратной матрице ставится в соответствие число, которое вычисляется из элементов матрицы по определенным правилам и называется определителем. Определитель матрицы второго порядка равен разности произведений элементов главной диагонали и побочной диагонали: 
В таком случае: 
Абсолютная величина определителя, таким образом, равна площади параллелограмма, построенного на векторах  , как на сторонах.
, как на сторонах.
Если сравнить это выражение с формулой векторного произведения (4.7), то:  (4.12) Это выражение представляет собой формулу для вычисления определителя матрицы третьего порядка по первой строке. Таким образом:
(4.12) Это выражение представляет собой формулу для вычисления определителя матрицы третьего порядка по первой строке. Таким образом:
Определитель матрицы третьего порядка вычисляется следующим образом:
и представляет собой алгебраическую сумму шести слагаемых.
Формулу для вычисления определителя матрицы третьего порядка легко запомнить, если воспользоваться правилом Саррюса, которое формулируется следующим образом:
- Каждое слагаемое является произведением трех элементов, расположенных в разных столбцах и разных строках матрицы;
- Знак “плюс” имеют произведения элементов, образующих треугольники со стороной, параллельной главной диагонали;
- Знак “минус” имеют произведения элементов, принадлежащих побочной диагонали, и два произведения элементов, образующих треугольники со стороной, параллельной побочной диагонали.
Смешанное произведение
Смешанным произведением тройки векторов  называется число, равное скалярному произведению вектора
называется число, равное скалярному произведению вектора  на векторное произведение
на векторное произведение 
Если рассматриваемые векторы  некомпланарны, то векторное произведение
некомпланарны, то векторное произведение  есть вектор, длина которого численно равна площади построенного на них параллелограмма. Направлен этот вектор по нормали к плоскости параллелограмма. Если этот вектор скалярно умножить на вектор а, то получившееся число будет равно произведению площади основания параллелепипеда, построенного на тройке векторов
есть вектор, длина которого численно равна площади построенного на них параллелограмма. Направлен этот вектор по нормали к плоскости параллелограмма. Если этот вектор скалярно умножить на вектор а, то получившееся число будет равно произведению площади основания параллелепипеда, построенного на тройке векторов  , и его высоты, т.е. объему этого параллелепипеда.
, и его высоты, т.е. объему этого параллелепипеда.
Таким образом, смешанное произведение векторов 
(которое обозначается есть число, абсолютная величина которого выражает объем параллелепипеда, построенного па векторах .
Знак произведение положителен, если векторы, образуют правую тройку векторов, т.е. вектор  направлен так, что кратчайший поворот от
направлен так, что кратчайший поворот от  виден из его конца совершающимся против часовой стрелки.
виден из его конца совершающимся против часовой стрелки.
Из геометрического смысла смешанного произведения непосредственно следует необходимое и достаточное условие некомпланарности векторов : для того, чтобы векторы были некомпланарными необходимо и достаточно, чтобы их сметанное произведение было отлично от нуля.
Если  и
и  то:
то:

или в свернутой форме:
Справедливы следующие свойства сметанного произведения векторов:
- Смешанное произведение не меняется при циклической перестановке его сомножителей
- При перестановке двух соседних множителей смешанное произведение меняет свой знак на противоположный

Векторы в высшей математике
Определение вектора:
На начальной стадии, когда приходится прибегать к математическим методам исследования, необходимо разработать удобное средство организации исходных данных. Таким простейшим средством является вектор. Например, еженедельное изменение цены за месяц на некоторый товар удобно записать в виде массива: (5500; 5700; 6000; 6200). Записанный таким образом массив чисел называют вектором.
Алгебраические операции над векторами и их свойства
Введём теперь математическое определение векторов и алгебраические операции над ними.
Упорядоченную совокупность действительных чисел назовём вектором и обозначим
назовём вектором и обозначим  , т.е
, т.е  . Действительные числа
. Действительные числа  будем называть координатами вектора. Равные векторы имеют равные координаты. Вектор, все координаты которого равны нулю, называется нулевым вектором и обозначается
будем называть координатами вектора. Равные векторы имеют равные координаты. Вектор, все координаты которого равны нулю, называется нулевым вектором и обозначается  . Вектор, у которого одна из координат равна 1, а все остальные равны нулю, называется единичным вектором. Единичными векторами будут векторы:
. Вектор, у которого одна из координат равна 1, а все остальные равны нулю, называется единичным вектором. Единичными векторами будут векторы:

С геометрической точки зрения, вектор – это направленный отрезок. Поэтому вектор, длина которого равна единице, также называется единичным вектором.
Определим далее линейные операции над векторами: сложение и умножение вектора на число.
Сложение векторов
Пусть даны два вектора
 . Суммой двух векторов
. Суммой двух векторов  и
и
 назовем вектор
назовем вектор  , координаты которого равны суммам соответствующих координат векторов
, координаты которого равны суммам соответствующих координат векторов  :
:

Пусть дан вектор  . Обозначим через –
. Обозначим через – вектор, порождённый вектором
вектор, порождённый вектором  , такой, что
, такой, что  .
.
Сложение векторов обладает следующими свойствами:
- Для любых двух векторов
 существует единственный вектор
существует единственный вектор  , называемый суммой векторов
, называемый суммой векторов  .
. - Для любых
 .
. - Для любых
 .
. - Существует единственный вектор
 , называемый нулевым вектором, такой, что
, называемый нулевым вектором, такой, что  для всех
для всех  .
. - Для любого вектора
 существует единственный вектор
существует единственный вектор  , такой, что
, такой, что  . Вектор
. Вектор  называется вектором, противоположным вектору
называется вектором, противоположным вектору 
Из указанных свойств векторов следует, что можно рассматривать сумму любого конечного числа векторов  .
.
Умножение вектора на число
Пусть  и
и
 . Произведение вектора
. Произведение вектора  на число
на число  – это вектор, обозначаемый,
– это вектор, обозначаемый,  полученный умножением координат вектора
полученный умножением координат вектора  на число
на число  :
:
 .
.
Положим,  для любого вектора
для любого вектора  для любого числа
для любого числа  .
.
Умножение вектора на число обладает следующими свойствами:
- Для любого вектора
 и любого числа
и любого числа  существует единственный вектор
существует единственный вектор  .
.  для любых чисел
для любых чисел  и любого
и любого .
. для любых чисел
для любых чисел  и любого .
и любого . для любых чисел
для любых чисел  и любого
и любого  .
. для любого
для любого  .
.
Выражение  где
где  – вскто-ры, а
– вскто-ры, а  – любые действительные числа, называется ли-нейиой комбинацией векторов
– любые действительные числа, называется ли-нейиой комбинацией векторов  с коэффициентами
с коэффициентами  . Линейная комбинация векторов-это вектор. Вектор
. Линейная комбинация векторов-это вектор. Вектор  представленный в виде
представленный в виде  будем называть транспонированным по отношению к вектору
будем называть транспонированным по отношению к вектору  и обозначать
и обозначать  .
.
Замечание. Зная координаты вектора  , можно вычислить его длину по формуле
, можно вычислить его длину по формуле
 .
.
Пример №16
Найти линейную комбинацию  векторов
векторов  .
.
Решение:
Воспользуемся определением линейной комбинации векторов и операций над векторами. Тогда получим вектор вида:

Скалярное произведение векторов и его свойства
Предположим, что объем продаж трёх видов товаров фирмы  в течение месяца составил 34, 57, 21 единиц, и что цены этих же товаров были равны соответственно 2, 3, 7 дсн.ед. Следовательно, общий доход от продажи всех трёх товаров за месяц равен:
в течение месяца составил 34, 57, 21 единиц, и что цены этих же товаров были равны соответственно 2, 3, 7 дсн.ед. Следовательно, общий доход от продажи всех трёх товаров за месяц равен:  ден.ед. Представим данные о продажах с помощью вектора:
ден.ед. Представим данные о продажах с помощью вектора:  , а соответствующие цены с помощью вектора
, а соответствующие цены с помощью вектора  . Тогда общий доход от продажи трёх товаров, равный 386 ден.ед., представляет собой сумму произведений элементов вектора
. Тогда общий доход от продажи трёх товаров, равный 386 ден.ед., представляет собой сумму произведений элементов вектора  на соответствующие элементы вектора
на соответствующие элементы вектора  :
: .
.
Приведенный пример помогает уяснить общую методику введения скалярного произведения векторов.
Определепие2.2.1. Скалярным произведением векторов  называется число, обозначаемое
называется число, обозначаемое  , равное сумме произведений соответствующих коорди-. пат векторов
, равное сумме произведений соответствующих коорди-. пат векторов  :
:

Это определение можно применять только в тех случаях, когда векторы  содержат одинаковое количество координат; в противном случае скалярное произведение
содержат одинаковое количество координат; в противном случае скалярное произведение  не может быть определено.
не может быть определено.
Укажем некоторые свойства скалярного произведения:
 ;
; ;
; ;
; .
.
Два ненулевых вектора  называются ортогональными, если их скалярное произведение равно нулю, т.е.
называются ортогональными, если их скалярное произведение равно нулю, т.е.

Рассмотрим систему n ненулевых векторов  . Если
. Если
скалярное произведение каждого вектора на себя равно единице, а скалярное произведение различных векторов равно нулю, т.е.

то система векторов  называется ортоиормированной. Условия (1.3) можно записать в координатной форме:
называется ортоиормированной. Условия (1.3) можно записать в координатной форме:

где  .
.
Пример №17
Найти вектор  коллинеарный1 вектору
коллинеарный1 вектору  и удовлетворяющий условию
и удовлетворяющий условию  .
.
Решение:
Так как вектор  коллинеарный вектору
коллинеарный вектору  , то его координаты пропорциональны координатам вектора
, то его координаты пропорциональны координатам вектора  , т.е.
, т.е.
 . Воспользовавшись определением скалярного произведения, составим равенство:
. Воспользовавшись определением скалярного произведения, составим равенство:  .
.
Откуда следует, что  . Тогда вектор коллинеарный вектору я будет иметь координаты: (6,-2,8).
. Тогда вектор коллинеарный вектору я будет иметь координаты: (6,-2,8).
Пример №18
Пусть рассматривается проект вложения капитала на четыре года. Этот проект должен обеспечивать следующую денежную выручку: в первый год- 1000 дсн.ед.; во второй – 3000 дсн.ед.; в третий – 10000 ден.ед.; в четвёртый – 15000 дсн.ед. Проект будет принят в том случае, если совокупный доход от капиталовложений (в пересчёте на сегодняшний доход) будет превышать требующиеся затраты, составляющие 17000 дсн.ед. Дисконтирование ожидаемого дохода проводится по годовой ставке равной 10%. Будет ли принят рассматриваемый проект?
Решение:
При ставке дисконтирования 10% годовых, доход, который будет получен на протяжении первого года, должен быть умножен на  , на протяжении второго года- на
, на протяжении второго года- на  , на протяжении третьего года- на 0,7513 =
, на протяжении третьего года- на 0,7513 = и на протяжении четвёртого года- на 0,6838 =
и на протяжении четвёртого года- на 0,6838 = .
.
1. Вектор  называется коллинеарным вектору
называется коллинеарным вектору  , если при совмещении их начальных точек они располагаются на одной прямой.
, если при совмещении их начальных точек они располагаются на одной прямой.
Запишем денежную выручку и дисконтирующие множители в векторной форме:

и
 .
.
Скалярное произведение векторов  и
и  —
—  —определяет дисконтированный совокупный доход за четыре года:
—определяет дисконтированный совокупный доход за четыре года: 
Так как 21158,3>17000, то рассматриваемый проект вложения капитала будет принят.
Операции над векторами в высшей математике
Внимание! Вектор определяется числом и направлением.
Отрезком АВ называется множество точек, заключенных между точками
А и В, включая их. Точки А и В называются концами отрезка.
Отрезок АВ называется направленным, если его концы упорядочены.
Направленный отрезок с началом в точке А и концом в точке В будем обозначать АВ. Направленный отрезок ВА с началом в точке В и концом в точке А называется противоположно направленным отрезку АВ.
Модулем  направленного отрезка АВ называется его длина.
направленного отрезка АВ называется его длина.
Вектором называется класс направленных отрезков, расположенных на параллельных или совпадающих прямых и имеющих одинаковые направление и длину.
Векторы геометрически изображают направленными отрезками и обозначаются  и буквами жирного шрифта
и буквами жирного шрифта 

Вывод. Вектор однозначно определяется своим одним направленным отрезком. Пусть заданы два вектора  и
и  (рис.1). Суммой векторов а и b
(рис.1). Суммой векторов а и b
называется вектор, проведенный из начала а к концу b: 
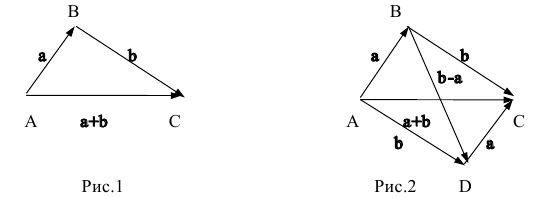
Способ сложения векторов, показанный на рис.1, называется правилом треугольника.
Замечание. На векторах а и b можно построить параллелограмм, в котором одна диагональ будет их суммой:  , а вторая – разностью:
, а вторая – разностью:  Способ сложения векторов, показанный на рис.2, называется правилом параллелограмма.
Способ сложения векторов, показанный на рис.2, называется правилом параллелограмма.
Множество всех нулевых отрезков называется нулевым вектором и обозначается 0. Направление нулевого вектора произвольно.
Вектор, длина которого равна единице, называется единичным.
Для любого вектора а верны равенства:

Произведением вектора а на число  отличное от нуля, называется вектор, обозначаемый
отличное от нуля, называется вектор, обозначаемый  и удовлетворяющий следующим условиям:
и удовлетворяющий следующим условиям:
- длина вектора
 равна длине вектора а, умноженного на модуль числа
равна длине вектора а, умноженного на модуль числа
- векторы а и одинаково направлены, если
 , и противоположно направлены, если
, и противоположно направлены, если  (рис.З).
(рис.З).
Произведение вектора на число «нуль» есть нулевой вектор. 
Углом между двумя векторами а и b называется наименьший угол  на который нужно повернуть один вектор, чтобы он совпал по направлению с другим вектором (рис.4).
на который нужно повернуть один вектор, чтобы он совпал по направлению с другим вектором (рис.4).
Проекцией вектора а на вектор b называется длина вектора а, умноженная на косинус угла между векторами а и b (рис.4):

Внимание! Для ненулевых векторов возможны три варианта произведений: скалярное произведение (в ответе получается число), векторное произведение (в ответе получается вектор) и смешанное произведение (в ответе получается число).
Скалярным произведением двух ненулевых векторов а и b называется число, равное произведению длин этих векторов на косинус угла между ними. Обозначение:  Таким образом,
Таким образом,

Например, для скалярного квадрата ii, где i -единичный вектор, имеем 
Векторным произведением двух ненулевых векторов а и b называется такой вектор  что
что
- 1) его модуль равен площади параллелограмма, построенного на данных векторах, т.е.

- 2) он перпендикулярен плоскости построенного на данных векторах параллелограмма, , т.е.

- 3) векторы
 образуют правую тройку векторов, т.е. при наблюдении из конца вектора
образуют правую тройку векторов, т.е. при наблюдении из конца вектора  кратчайший поворот от а к b виден против часовой стрелки.
кратчайший поворот от а к b виден против часовой стрелки.
Пример №19
Найти площадь параллелограмма, построенного на векторах а и b. если а – единичный вектор, длина вектора b равна трем, а их скалярное произведение – двум.
Решение:
Площадь параллелограмма, построенного на векторах а и b, равна 
 .
.
По условию задачи имеем 
Найдем синус угла между векторами а и b. Так как  то
то 
Следовательно, 
Подставим найденное значение в формулу и получим:  Задача решена.
Задача решена.
Смешанным произведением трех ненулевых векторов а, b и с называется число, равное скалярному произведению векторного произведения первых двух векторов а и b на третий вектор  . Обозначение:
. Обозначение: 
Замечание. Смешанное произведение не меняется при циклической перестановке его сомножителей. При перестановке двух соседних множителей смешанное произведение меняет свой знак на противоположный, т.е. 
Геометрический смысл смешанного произведения. Модуль смешанного произведения трех векторов равен объему параллелепипеда, построенного на этих векторах.
Действительно,
 где S – площадь основания параллелепипеда, H – высота параллелепипеда, V -объем параллелепипеда.
где S – площадь основания параллелепипеда, H – высота параллелепипеда, V -объем параллелепипеда.
Два вектора называются ортогональными, если угол между ними равен 
Необходимое и достаточное условие ортогональности:
Два ненулевых вектора ортогональны тогда и только тогда, когда их скалярное произведение равно нулю  Нулевой вектор ортогонален любому вектору.
Нулевой вектор ортогонален любому вектору.
Два вектора называются коллинеарными, если они лежат на одной прямой. Пулевой вектор коллинеарен любому вектору.
Необходимое и достаточное условие коллинеарности:
- Два ненулевых вектора а и b коллинеарны тогда и только тогда, когда они пропорциональны, т.е.
 – произвольное число, отличное от нуля.
– произвольное число, отличное от нуля. - Два ненулевых вектора коллинеарны тогда и только тогда, когда их векторное произведение равно нулевому вектору (площадь параллелограмма равна нулю).
Три вектора называются компланарными, если они лежат на одной плоскости. Любую тройку векторов, содержащую нулевой вектор, считают компланарной.
Необходимое и достаточное условие компланарности. Три ненулевых вектора компланарны тогда и только тогда, когда их смешанное произведение равно нулю (объем параллелепипеда равен нулю).
Действия над векторами, заданными прямоугольными координатами
Пусть Ох, Оу, Oz – три взаимно перпендикулярные оси в трехмерном пространстве (оси координат), исходящие из общей точки О (начала координат) и образующие правую тройку (рис. 5).
Точка М с координатами х, у, z обозначается M(x,y,z), причем первая координата называется абсциссой, вторая – ординатой, третья – аппликатой точки М.
Для каждой точки М пространства существует ее радиус-вектор r=ОМ, начало которого есть начало координат О и конец которого есть данная точка М. Координаты x,y,z точки М являются проекциями радиус-вектора r на оси Ох, Оу, Oz соответственно.
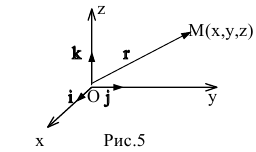 Пусть в прямоугольной системе координат заданы точки
Пусть в прямоугольной системе координат заданы точки  и
и  Тогда координаты вектора АВ вычисляются по формуле:
Тогда координаты вектора АВ вычисляются по формуле:

(«от координат конца отнимают координаты начала»).
Например, координаты радиус-вектора 
Если ввести единичные векторы i,j, k, направленные по осям Ох, Оу, Oz соответственно (рис.5), то координаты вектора r можно записать в эквивалентной форме:

Векторы i, j,k называются базисными.
Пусть даны два вектора 
Сложив векторы почленно, получим: 
или

Умножив вектор а на число  получим:
получим:

или

Пример №20
Найти вектор х из уравнения

Решение:
Выразим х из векторного уравнения:

Подставим векторы а, b и с в полученное выражение:
Задача решена.
Скалярное произведение двух векторов в координатной форме вычисляется по формуле:

Для cкалярного квадрата аа получаем: 
но, с другой стороны,  Следовательно,
Следовательно,
Мы получили формулу вычисления длины вектора, заданного в координатной форме.
Векторное произведение двух векторов в координатной форме вычисляется по формуле

которую можно выразить через символический определитель третьего порядка 
Смешанное произведение трех векторов в координатной форме  определяется формулой
определяется формулой 
- Заказать решение задач по высшей математике
Пример №21
Вершины треугольной пирамиды находятся в точках А( 1,1 ,-1), В(2,1,-3), С(-1,1,1), D(0,7,3). Вычислить высоту пирамиды, опущенную из вершины D на основание АВС.
Решение:
Высоту треугольной пирамиды найдем из формулы:
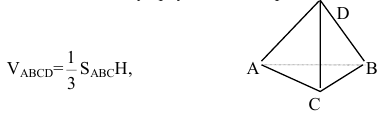
где  – объем пирамиды ABCD,
– объем пирамиды ABCD,  – площадь основания АВС, H – высота пирамиды, опущенная из вершины D.
– площадь основания АВС, H – высота пирамиды, опущенная из вершины D.
Найдем площадь треугольника АВС. Она равна половине площади параллелограмма, построенного, например, на векторах АВ и АС. Следовательно, по определению векторного произведения
 По координатам точек А, В и С найдем координаты векторов АВ и АС:
По координатам точек А, В и С найдем координаты векторов АВ и АС:
Векторное произведение АВ и АС в координатной форме равно 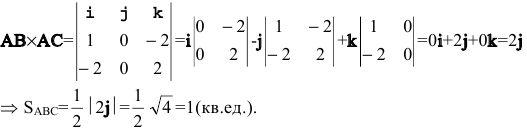
Найдем объем треугольной пирамиды. Он равен одной шестой объема параллелепипеда, построенного, например, на векторах АВ, АС и AD. Тогда по геометрическому смыслу смешанного произведения  Найдем координаты вектора AD:
Найдем координаты вектора AD:

Смешанное произведение АВ, АС и AD в координатной форме равно  разложим определитель по второму столбцу
разложим определитель по второму столбцу

Задача решена.
Замечание.
- 1. Площадь треугольника АВС можно находить из площади параллелограмма, построенного на любых двух векторах, исходящих из одной вершины, например: АВ и АС; ВА и ВС; СА и СВ.
- 2. Объем треугольной пирамиды ABCD можно находить из объема параллелепипеда, построенного на любых трех векторах, исходящих из одной точки, например: АВ, АС и AD; ВА, ВС и BD; СА, СВ и CD; DA, DB и DC.
Линейное пространство
Идея линейности является одним из важнейших принципов математики. На этой основе построены различные разделы математики. Более того, почти каждый экономический процесс в малом является линейным, что позволяет делать о нём достаточно точные выводы, изучая линейный, гораздо более простой для исследования объект.
В математике часто приходится встречаться с объектами, для которых определены операции сложения и умножения на числа. Объектами такого рода являются векторы, функции, матрицы и т.д. Для того, чтобы изучать все такие объекты с единой точки зрения и вводится понятие линейного пространства.
Определение 2.3.1. Множество L элементов х, у, z,… называется линейным пространством, если:
При этом введенные операции должны удовлетворять следующим требованиям (аксиомам):
- х+у = у+х (коммутативности);
- (х+у)+ z = x+(y+z) (ассоциативности);
- существует элемент 0, такой, что х+0=х для любого х. Элемент 0 называется нулевым элементом;
- для каждого х существует противоположный элемент, обозначаемый -х, такой, что х+(-х)=0;
 ;
; ;
; :;
:; ,
,
где  и
и  – вещественные числа.
– вещественные числа.
В определении линейного пространства не говорится, как определяются операции сложения и умножения на числа, и не говорится о природе объектов. Требуется только, чтобы были выполнены сформулированные выше аксиомы. Поэтому всякий раз, когда мы встречаемся с операциями, удовлетворяющими этим условиям, будем считать их операциями сложения и умножения.
Рассмотрим систему векторов на плоскости и в трёхмерном пространстве, для которых определены операции сложения векторов и умножения вектора на число как в п.2.1. Так как для этих операций выполняются свойства (1) – (8) определения 2.3.1, то они образуют линейное пространство.
Линейное пространство образует и совокупность многочленов степени не выше п с вещественными коэффициентами, для которых определены обычные операции сложения многочленов и умножения многочлена на число.
Линейное пространство, в котором введено скалярное произведение, называется евклидовым.
Пространство, где векторами являются наборы из n действительных чисел с покомпонентными операциями сложения и умножения их на число, и скалярное произведение определяется по формуле (1.2.1), является евклидовым пространством. Это пространство обозначается  .
.
Линейно зависимые и линейно независимые векторы. Свойства линейной зависимости векторов.
Определение линейной комбинации векторов, тесно связано с понятием подпространства векторного пространства.
Определение 2.4.1. Некоторое непустое подмножество векторного пространства М называется подпространством, если оно само является векторным пространством.
А доказательство того, что подмножество является векторным пространством, проводится на основании доказательства того, что всякая линейная комбинация любых двух векторов этого подмножества, также является вектором этого подмножества.
Определение 2.4.2. Векторы  из
из  называются линейно независимыми, если не существует чисел
называются линейно независимыми, если не существует чисел  хотя бы одно из которых отлично от нуля, таких, что
хотя бы одно из которых отлично от нуля, таких, что 
Если равенство (2.4.1) возможно и при ненулевом значении хотя бы одного числа  , то векторы
, то векторы  называются линейно зависимыми.
называются линейно зависимыми.
Пример №22
Рассмотрим евклидово пространство  и векторы
и векторы 
называемые координатными векторами. Покажем, что в пространстве  векторы
векторы линейно независимы.
линейно независимы.
Решение:
Пусть  произвольные числа. Составим линейную комбинацию векторов
произвольные числа. Составим линейную комбинацию векторов  :
:

Подставив координаты векторов  , получим:
, получим:
В результате получили вектор , который будет нулевым если
, который будет нулевым если  . Следовательно, линейная комбинация
. Следовательно, линейная комбинация  , может равняться нулю если
, может равняться нулю если  . А это и есть условие линейной независимости векторов
. А это и есть условие линейной независимости векторов  .
.
Вектор  называется линейной комбинацией векторов
называется линейной комбинацией векторов  из
из  , если существуют числа
, если существуют числа , такие, что выполняется равенство:
, такие, что выполняется равенство:  .
.
Относительно линейной зависимости векторов справедливы следующие утверждения:
- Если совокупность векторов
 из
из  содержит нулевой вектор, то она линейно зависима.
содержит нулевой вектор, то она линейно зависима. - Если в системе векторов
 имеется подсистема линейно зависимых векторов, то и вся совокупность векторов
имеется подсистема линейно зависимых векторов, то и вся совокупность векторов  линейно зависима.
линейно зависима. - Система векторов
 из
из  линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных.
линейно зависима тогда и только тогда, если один из векторов этой системы является линейной комбинацией остальных. - Любые
 векторов
векторов  из
из  , каждый из которых является линейной комбинацией m векторов
, каждый из которых является линейной комбинацией m векторов  линейно зависимы. .
линейно зависимы. .
Пример №23
Выясним линейную зависимость векторов  и
и  . Решение. Составим линейную комбинацию этих векторов
. Решение. Составим линейную комбинацию этих векторов
Полученный вектор является нулевым, если координаты равны нулю:
Полученная система имеет только одно решение  . Следовательно, векторное равенство
. Следовательно, векторное равенство  выполняется при нулевых значениях коэффициентов
выполняется при нулевых значениях коэффициентов  . Это значит, что векторы
. Это значит, что векторы  линейно независимы.
линейно независимы.
Заметим, что два геометрических вектора линейно зависимы тогда и только тогда, когда они коллинеарны (их направления параллельны). Три геометрических вектора линейно зависимы тогда и только тогда, когда они компланарны (их направления параллельны некоторой плоскости).
Элементы векторной алгебры
Некоторые физические величины (например, температура, масса, объем, работа, потенциал) могут быть охарактеризованы одним числом, которое выражает отношение этой величины к соответствующей единице измерения; такие величины называются скалярными. Ещё примеры скалярных величин: длина, площадь, время, угол, плотность, сопротивление.
Другие величины (например, сила, скорость, ускорение, напряжённость электрического или магнитного поля) характеризуются числом и направлением. Эти величины называются векторными.
Необходимо подчеркнуть, что вектор не является числом. Если мы рассматриваем вектор, лежащий в плоскости, то для его описания необходимо знать два фактора – модуль и его направление (например, угол, образуемый им с одним из осей координат). Если рассматривается вектор в трехмерном пространстве, то для описания вектора требуется три фактора: один – величину для его модуля и два для указания его положения в системе координат.
Скаляры и векторы
Величина, полностью характеризуемая своим числовым значением в выбранной системе единиц, называется скалярной или скаляром. Таковы, например, масса тела, объем его, температура среды и т. п. Скаляр определяется числом положительным или отрицательным или равным нулю.
Величина, кроме числового значения характеризуемая еще направлением, называется векторной или вектором. К числу их относятся сила, перемещение, скорость и т.п. Вектор определяется числом и направлением.
Векторы обычно обозначают буквами жирного шрифта, например а. Геометрически вектор изображается направленным отрезком пространства (рис. 168); при этом используется обозначение а =  , где точка А — начало В отрезка, а точка В — конец его. В дальнейшем, для наглядности изложения, векторы мы будем рассматривать как направленные отрезки.
, где точка А — начало В отрезка, а точка В — конец его. В дальнейшем, для наглядности изложения, векторы мы будем рассматривать как направленные отрезки.
Под модулем (длиной) вектора а

понимается числовое значение его, без учета направления. (Естественно,  обозначает модуль вектора ) Вектор 0, модуль которого равен нулю, называется нулевым или нуль-вектором (направление нулевого вектора произвольно).
обозначает модуль вектора ) Вектор 0, модуль которого равен нулю, называется нулевым или нуль-вектором (направление нулевого вектора произвольно).
Два вектора  считаются равными, если они расположены на параллельных или совпадающих прямых (параллельность в широком смысле) и имеют одинаковую длину и одинаково направлены. Мы условимся не различать равные векторы и, таким образом, приходим к понятию свободного вектора. Иными словами, свободный вектор допускает перенос его в любую точку пространства при условии сохранения длины и направления.
считаются равными, если они расположены на параллельных или совпадающих прямых (параллельность в широком смысле) и имеют одинаковую длину и одинаково направлены. Мы условимся не различать равные векторы и, таким образом, приходим к понятию свободного вектора. Иными словами, свободный вектор допускает перенос его в любую точку пространства при условии сохранения длины и направления.
В частности, для свободных векторов можно обеспечить общую начальную точку их. В дальнейшем мы будем излагать теорию свободных векторов в трехмерном пространстве.
Сумма векторов
Определение: Суммой нескольких векторов, например а, b, с, d (рис. 169), называется вектор

по величине и направлению равный замыкающей ОМ пространственной ломаной линии, построенной на данных векторах.
Для случая двух векторов а и b (рис. 170) их суммой s является диагональ параллелограмма, построенного на этих векторах, исходящая из общей точки приложения их (правило параллелограмма).
Так как в треугольнике длина одной стороны не превышает суммы длин двух других сторон, то из рис. 170 имеем

т. е. модуль суммы двух векторов не превышает суммы модулей этих векторов.
Для случая трех векторов а, b, с (рис. 171) их суммой s является диагональ  параллелепипеда, построенного на этих векторах (правило параллелепипеда).
параллелепипеда, построенного на этих векторах (правило параллелепипеда).
Легко проверить, что для векторного сложения справедливы следующие свойства:
1)переместительное свойство
а + b = b + а,
т. е. векторная сумма не зависит от порядка слагаемых;
2)сочетательное свойство

т.е. сумма трех (и большего числа) векторов не зависит от порядка расстановки скобок.
Для каждого вектора  (рис. 172) существует противоположный вектор
(рис. 172) существует противоположный вектор  , имеющий ту же длину, но противоположное направление. По правилу параллелограмма, очевидно, имеем
, имеющий ту же длину, но противоположное направление. По правилу параллелограмма, очевидно, имеем

где 0 — нуль-вектор.

Легко проверить, что а + 0 = а.
Разность векторов
Под разностью векторов  (рис. 173) понимается вектор
(рис. 173) понимается вектор

такой, что

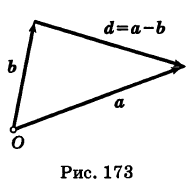
Отметим, что в параллелограмме, построенном на данных векторах (см. рис. 170), их разностью является соответственно направленная вторая диагональ.
Легко проверить, что справедливо следующее правило вычитания:

Умножение вектора на скаляр
Определение: Произведением вектора а на скаляр k (рис. 174) называется вектор
имеющий длину b = а, направление которого: 1) совпадает
а, направление которого: 1) совпадает
с направлением вектора а, если k > 0; 2) противоположно ему, если k < 0; 3) произвольно, если k = 0.
Нетрудно убедиться, что эта векторная операция обладает следующими свойствами:
Пример:

Если ненулевой вектор а разделить на его длину a = |a| (т.е. умножить на скаляр 1 /а), то мы получим единичный вектор е, так называемый  , того же направления: е = а/а. Отсюда имеем стандартную формулу вектора
, того же направления: е = а/а. Отсюда имеем стандартную формулу вектора

Формула (1) формально справедлива также и для нулевого вектора а = 0, где а = 0 и е — произвольный орт.
Коллинеарные векторы
Определение: Два вектора  (рис. 175) называются коллинеарными, если они параллельны в широком смысле (т. е. расположены или на параллельных прямых, или же на одной и той же прямой).
(рис. 175) называются коллинеарными, если они параллельны в широком смысле (т. е. расположены или на параллельных прямых, или же на одной и той же прямой).
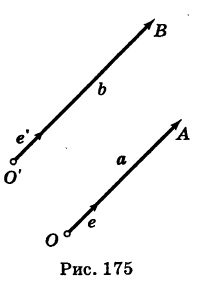
Так как направление нулевого вектора произвольно, то можно считать, что нулевой вектор коллинеарен любому вектору.
Теорема: Два ненулевых вектора  коллинеарны тогда и только тогда, когда они пропорциональны, т.е.
коллинеарны тогда и только тогда, когда они пропорциональны, т.е.

(k — скаляр).
Доказательство: 1) Пусть векторы 
 коллинеарны и е, е’ — их орты. Имеем
коллинеарны и е, е’ — их орты. Имеем

Очевидно,

где знак плюс соответствует векторам одинакового направления, а знак минус— векторам противоположного направления.
Из формул (2) и (3) получаем

Отсюда вытекает формула (1), где 
2) Если выполнено равенство (1), то коллинеарность векторов непосредственно следует из смысла умножения векторов на скаляр.
Компланарные векторы
Определение: Три вектора a, b и с называются компланарны ми, если они параллельны некоторой плоскости в широком смысле (т. е. или параллельны плоскости, или лежат в ней).
Можно сказать также, что векторы а, b и с компланарны тогда и только тогда, когда после приведения их к общему началу они лежат в одной плоскости.
По смыслу определения тройка векторов, среди которых имеется хотя бы один нулевой, компланарна.
Теорема: Три ненулевых вектора а, b и с компланарны тогда и только тогда, когда один из них является линейной комбинацией других, т.е., например,

(k, I — скаляры).
Доказательство: 1) Пусть векторы а, b и с компланарны, расположены в плоскости Р (рис. 176) и имеют общую точку приложения О.
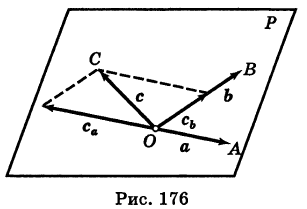
Предположим сначала, что эти векторы не все попарно коллинеарны, например векторы а и b неколлинеарны. Тогда, производя разложение вектора с в сумму векторов са и сь, коллинеарных соответственно векторам а и b, в силу будем иметь

где k и I — соответствующие скаляры.
Если векторы а, b, с попарно коллинеарны, то можно написать

таким образом, снова выполнено условие (1).
2) Обратно, если для векторов  (рис. 176) выполнено условие (1), то на основании смысла соответствующих векторных операций вектор с расположен в плоскости, содержащей векторы а и b, т. е. эти векторы компланарны.
(рис. 176) выполнено условие (1), то на основании смысла соответствующих векторных операций вектор с расположен в плоскости, содержащей векторы а и b, т. е. эти векторы компланарны.
Пример:
Векторы а, а + b, а – b компланарны, так как
Проекция вектора на ось
Осью называется направленная прямая. Направление прямой обычно обозначается стрелкой. Заданное направление оси будем считать положительным, противоположное — отрицательным.
Определение: Проекцией точки А на ось  (рис.177) называется основание А’ перпендикуляра АА’, опущенного из точки А на эту ось.
(рис.177) называется основание А’ перпендикуляра АА’, опущенного из точки А на эту ось.
Здесь под перпендикуляром АА’ понимается прямая, пересекающая ось и составляющая с ней прямой угол. Таким образом, проекция А есть пересечение плоскости, проходящей через точку А и перпендикулярной оси с этой осью.
Определение: Под ком-по не н той (составляющей) вектора  относительно оси (рис. 177) понимается вектор а’ = АВ’, начало которого А есть проекция на ось начала А вектора а, а конец которого В’ есть проекция на ось конца В этого вектора.
относительно оси (рис. 177) понимается вектор а’ = АВ’, начало которого А есть проекция на ось начала А вектора а, а конец которого В’ есть проекция на ось конца В этого вектора.
Определение: Под проекцией вектора а на ось понимается скаляр 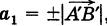 , равный длине {модулю) его компоненты а’ относительно оси , взятой со знаком плюс.
, равный длине {модулю) его компоненты а’ относительно оси , взятой со знаком плюс.
Напомним, что все геометрические объекты мы здесь рассматриваем в трехмерном пространстве.
Если направление компоненты совпадает с направлением оси , и со знаком минус, если направление компоненты противоположно направлению оси
Если а = О, то полагают = О.
= О.
Заметим, что если е — единичный вектор оси , то для компоненты а’ справедливо равенство

Теорема: Проекция вектора а на ось равна произведению длины а вектора на косинус угла между направлением вектора и направлением оси, т.е.

Доказательство: Так как вектор  свободный (рис. 178), то можно предположить, что начало его О лежит на оси .
свободный (рис. 178), то можно предположить, что начало его О лежит на оси .
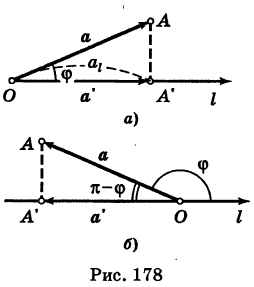
1) Если угол ф между вектором a и осью острый  , то направление компоненты
, то направление компоненты  вектора а совпадает с направлением оси (рис. 178, а). В этом случае имеем
вектора а совпадает с направлением оси (рис. 178, а). В этом случае имеем

2) Если угол ф между вектором а и осью тупой  (рис. 178, б), то направление компоненты вектора а противоположно направлению оси Тогда получаем
(рис. 178, б), то направление компоненты вектора а противоположно направлению оси Тогда получаем

3) Если же ф =  , то формула (2), очевидно, выполняется, так как при этом
, то формула (2), очевидно, выполняется, так как при этом  .
.
Таким образом, формула (2) доказана.
Следствие 1. Проекция вектора на ось: 1) положительна, если вектор образует с осью острый угол; 2) отрицательна, если этот угол — тупой, и 3) равна нулю, если этот угол — прямой.
Следствие 2. Проекции равных векторов на одну и ту же ось равны между собой.
Теорема: Проекция суммы нескольких векторов на данную ось равна сумме их проекций на эту ось.
Доказательство: Пусть, например, s = a + b + с,
где (рис. 179) 

 и, следовательно,
и, следовательно,  .
.
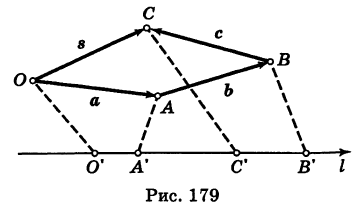
Обозначая проекции точек  на ось
на ось  через
через  и учитывая направления компонент (рис. 179), имеем
и учитывая направления компонент (рис. 179), имеем

что и требовалось доказать.
Следствие. Проекция замкнутой векторной линии на любую ось равна нулю.
Теорема: При умножении вектора на скаляр его проекция на данную ось умножается на этот скаляр, т.е.

Формула (4) следует из теоремы 1 и смысла умножения вектора на скаляр.
Следствие. Проекция линейной комбинации векторов равна такой же линейной комбинации проекций этих векторов, т.е.

Прямоугольные декартовы координаты в пространстве
Пусть (рис. 180) Ox, Оу, Oz — три взаимно перпендикулярные оси в трехмерном пространстве (оси координат), исходящие из общей точки О (начало координат) и образующие правую тройку (правая система координат), т. е. ориентированные по правилу правого буравчика. Иными словами, для наблюдателя, направленного по оси Oz, кратчайший поворот оси Ох к оси Оу происходит против хода часовой стрелки.
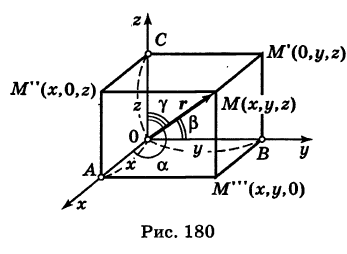
Три взаимно перпендикулярные плоскости Oyz, Ozx и Оху, проходящие через соответствующие оси, называются координатными плоскостями; они делят все пространство на восемь октантов.
Для каждой точки М пространства (рис. 180) существует ее радиус-вектор г = ОМ, начало которого есть начало координат О и конец которого есть данная точка М.
Определение: Под декартовыми прямоугольными координатами х, у, z точки М понимаются проекции ее радиуса вектора г на соответствующие оси координат, т. е.

В дальнейшем для краткости декартовы прямоугольные координаты мы будем называть просто прямоугольными координатами.
Точка М с координатами х, у, z обозначается через М (х, у, z), причем первая координата называется абсциссой, вторая — ординатой, а третья — аппликатой точки М.
Для нахождения этих координат через точку М проведем три плоскости МА, MB, МС, перпендикулярные соответственно осям Ox, Оу, Oz (рис. 180). Тогда на этих осях получатся направленные отрезки

численно равные координатам точки М.
Радиус-вектор г является диагональю параллелепипеда П с измерениями  , образованного плоскостями МА, МБ, МС и координатными плоскостями. Поэтому
, образованного плоскостями МА, МБ, МС и координатными плоскостями. Поэтому

Если обозначить через  углы, образованные радиусом-вектором г с координатными осями, то будем иметь
углы, образованные радиусом-вектором г с координатными осями, то будем иметь

Косинусы cos а, cos р, cos у называются направляющими косинусами радиуса-вектора г. Из (4), учитывая (3), получаем

т. е. сумма квадратов направляющих косинусов радиуса-век-тора точки пространства равна 1.
Из формулы (4) следует, что координата точки М положительна, если радиус-вектор этой точки образует острый угол с соответствующей координатной осью, и отрицательна, если этот угол тупой. В частности, в I октанте пространства, ребра которого составляют положительные полуоси координат, все координаты точек положительны- В остальных октантах пространства отрицательными координатами точек будут те, которые соответствуют отрицательно направленным ребрам октанта.
Измерения  параллелепипеда П равны расстояниям точки М соответственно от координатных плоскостей Oyz, Ozx, Оху. Таким образом, декартовы прямоугольные координаты точки М пространства представляют собой расстояния от этой точки до координатных плоскостей, взятые с надлежащими знаками,
параллелепипеда П равны расстояниям точки М соответственно от координатных плоскостей Oyz, Ozx, Оху. Таким образом, декартовы прямоугольные координаты точки М пространства представляют собой расстояния от этой точки до координатных плоскостей, взятые с надлежащими знаками,
В частности, если точка  лежит на плоскости Oyz, то х = 0; если на плоскости Ozx, то у = 0; если же на плоскости Оху, то z = 0, и обратно.
лежит на плоскости Oyz, то х = 0; если на плоскости Ozx, то у = 0; если же на плоскости Оху, то z = 0, и обратно.
Длина и направление вектора
Пусть в пространстве Oxyz задан вектор а. Проекции этого вектора на оси координат

называются координатами вектора а; при этом вектор мы будем записывать так: 
Так как вектор а свободный, то его можно рассматривать как радиус-вектор точки  . Отсюда получаем длину вектора
. Отсюда получаем длину вектора

т.е. модуль вектора равен корню квадратному из суммы квадратов его координат.
Направляющие косинусы вектора а определяются из уравнений

причем

т.е. сумма квадратов направляющих косинусов вектора равна единице. Направляющие косинусы ненулевого вектора однозначно определяют его направление. Следовательно, вектор полностью характеризуется своими координатами.
Пример №24
Найти длину и направление вектора а = {1, 2, -2}.
Решение:
Имеем

Отсюда
Таким образом, вектор а образует острые углы с координатными осями Ох и Оу и тупой угол с координатной осью Ог.
Расстояние между двумя точками пространства
Пусть  — начальная точка отрезка
— начальная точка отрезка  и
и 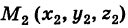 — конечная точка его. Точки
— конечная точка его. Точки  можно задать их радиусами-векторами
можно задать их радиусами-векторами  и
и  (рис. 181).
(рис. 181).
Рассматривая вектор  , из
, из  будем иметь
будем иметь

Проецируя это векторное равенство на оси координат и учитывая свойства проекций, получаем

Таким образом, проекции направленного отрезка на оси координат равны разностям соответствующих координат конца и начала отрезка.
Из формул (2) получаем длину отрезка (или, иначе, расстояние между двумя точками  )
)

Итак, расстояние между двумя точками пространства равно корню квадратному из квадратов разностей одноименных координат этих точек.
Пример №25
Ракета из пункта М1 (10, -20, 0) прямолинейно переместилась в пункт М2 (-30, -50, 40) (расстояния даны в километрах). Найти путь пройденный ракетой.
Решение:
На основании формулы (3) имеем

Заметим, что, найдя направляющие косинусы вектора перемещения  , нетрудно определить направление движения ракеты.
, нетрудно определить направление движения ракеты.
Действие над векторами, заданными в координатной форме
Пусть вектор  задан своими проекциями на оси координат Ox, Оу, Oz.
задан своими проекциями на оси координат Ox, Оу, Oz.
Построим параллелепипед (рис. 182), диагональю которого является вектор а, а ребрами служат компоненты его  относительно соответствующих координатных осей. Имеем разложение
относительно соответствующих координатных осей. Имеем разложение

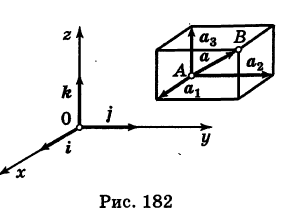
Если ввести единичные векторы (орты) i, j, k, направленные по осям координат, то на основании связи между компонентами вектора и его проекциями будем иметь

Подставляя эти выражения в равенство (1), получаем координатную форму вектора

Заметим, что разложение (3) для вектора а единственно. Действительно, пусть

Отсюда, вычитая из равенства (3) равенство (3′) и пользуясь перемести -тельным и сочетательным свойствами суммы векторов, а также свойствами разности векторов, будем иметь

Если хотя бы один из коэффициентов при ортах i, j и k был отличен от нуля, то векторы i, j и k были бы компланарны, что неверно. Поэтому  и единственность разложения (3) доказана.
и единственность разложения (3) доказана.
Если  то, очевидно, также имеем
то, очевидно, также имеем

Рассмотренные выше линейные операции над векторами можно теперь записать в следующем виде:

или короче:  . Таким образом, при умножении вектора на скаляр координаты вектора умножаются на этот скаляр;
. Таким образом, при умножении вектора на скаляр координаты вектора умножаются на этот скаляр;

или кратко: 
Таким образом, при сложении (или вычитании) векторов их одноименные координаты складываются (или вычитаются):
Пример №26
Найти равнодействующую F двух сил

и ее направление.
Решение:
Имеем  . Отсюда
. Отсюда

где  — направляющие косинусы равнодействующей F.
— направляющие косинусы равнодействующей F.
Скалярное произведение векторов
Определение: Под скалярным произведением двух векторов а и b понимается число, равное произведению длин этих векторов на косинус угла между ними, т. е. в обычных обозначениях:

где 
Заметим, что в формуле (1) скалярное произведение можно еще записывать как ab, опуская точку. Так как (рис. 183)

то можно записать

т.е. скалярное произведение двух векторов равно длине одного из них, умноженной на проекцию другого на ось с направлением первого.
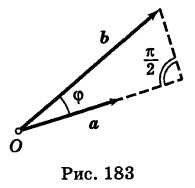
Физический смысл скалярного произведения
Пусть постоянная сила F обеспечивает прямолинейное перемещение  материальной точки. Если сила F образует угол ф с перемещением s (рис. 184), то из физики известно, что работа силы F при перемещении s равна
материальной точки. Если сила F образует угол ф с перемещением s (рис. 184), то из физики известно, что работа силы F при перемещении s равна
На основании формулы (1) имеем

Таким образом, работа постоянной силы при прямолинейном перемещении ее м точки приложения равна скалярному произведению вектора силы на вектор перемещения.
Скалярное произведение векторов обладает следующими основными свойствами.
1)Скалярное произведение двух векторов не зависит от порядка этих сомножителей (переместительное свойство):

Эта формула непосредственно следует из формулы (1).
2)Для трех векторов а, b и с справедливо распределительное свойство

т. е. при скалярном умножении суммы векторов на вектор можно «раскрыть скобки».
Действительно, на основании формул (2), учитывая свойства проекций векторов, имеем

3)Скалярный квадрат вектора равен квадрату модуля этого вектора, т.е.

Действительно,

Отсюда для модуля вектора получаем формулу

4)Скалярный множитель можно выносить за знак скалярного произведения, т.е.

Это свойство также легко получается из (1).
5)Скалярное произведение линейной комбинации векторов на произвольный вектор равно такой же линейной комбинации данных векторов на этот вектор, т.е.

( — скаляры).
— скаляры).
Это — очевидное следствие 2) и 4).
Из определения (1) вытекает, что косинус угла  между двумя ненулевыми векторами а и b равен
между двумя ненулевыми векторами а и b равен

Из формулы (8) получаем, что два вектора а и b перпендикулярны (ортогональны), т. е.  , тогда и только тогда, когда
, тогда и только тогда, когда

Это утверждение справедливо также и в том случае, когда хотя бы один из векторов а или b нулевой.
Пример №27
Найти проекцию вектора а на вектор b. Обозначая через  угол между этими векторами, имеем
угол между этими векторами, имеем

где е = — орт вектора b
— орт вектора b
Скалярное произведение векторов в координатной форме
Пусть

Перемножая эти векторы как многочлены и учитывая соотношения

будем иметь

Таким образом, скалярное произведение векторов равно сумме парных произведений их одноименных координат. Отсюда, обозначая через ф угол между векторами а и b, получаем

Пример:
Определить угол ф между векторами а = { 1,+2, 3} и b ={-3, 2,-1}. На основании формулы (4) имеем

Отсюда 
Пусть векторы а и b коллинеарны (параллельны). Согласно условию коллинеарности,

где k — скаляр, что эквивалентно  или
или

Таким образом, векторы коллинеарны тогда и только тогда, когда их одноименные координаты пропорциональны.
Для перпендикулярных (ортогональных) векторов а и b имеем  и, следовательно, cos ф = 0 или, согласно формуле (4),
и, следовательно, cos ф = 0 или, согласно формуле (4),

Таким образом, два вектора перпендикулярны тогда и только тогда, когда сумма парных произведений их одноименных координат равна нулю.
Векторное произведение векторов
Напомним, что тройка а, b и с некомпланарных векторов называется правой (рис. 185, а) или левой (рис. 185, б), если она ориентирована по правилу правого винта или соответственно по правилу левого винта.
Заметим, что если в тройке некомпланарных векторов а, b, с переставить два вектора, то она изменит свою ориентацию, т. е. из правой сделается левой или наоборот.
В дальнейшем правую тройку мы будем считать стандартной.
Определение: Под векторным произведением двух векторов а и b понимается вектор

для которого:
1)модуль равен площади параллелограмма, построенного на данных векторах, т. е.

где  (рис. 186);
(рис. 186);
2)этот вектор перпендикулярен перемножаемым векторам (иначе говоря, перпендикулярен плоскости построенного на них параллелограмма), т. е.  ;
;
3)если векторы неколлинеарны, то векторы а, b, с образуют правую тройку векторов.
Укажем основные свойства векторного произведения.
1)При изменении порядка сомножителей векторное произведение меняет свой знак на обратный, сохраняя модуль, т. е.

Действительно, при перестановке векторов а и b площадь построенного на них параллелограмма остается неизменной, т. е.  . Однако тройка векторов
. Однако тройка векторов  является левой. Поэтому направление вектора
является левой. Поэтому направление вектора  противоположно направлению вектора
противоположно направлению вектора  (а и b неколлинеарны). Если а и b коллинеарны, то равенство (3) очевидно.
(а и b неколлинеарны). Если а и b коллинеарны, то равенство (3) очевидно.
Таким образом, векторное произведение двух векторов не обладает переместительным свойством.
2)Векторный квадрат равен нуль-вектору, т.е.

Это — очевидное следствие свойства 1).
3)Скалярный множитель можно выносить за знак векторного произведения, т.е. если  — скаляр, то
— скаляр, то

Это свойство непосредственно вытекает из смысла произведения вектора на скаляр и определения векторного произведения.
4)Для любых трех векторов а, b, с справедливо равенство

т.е. векторное произведение обладает распределительным свойством.
Пример:

Отсюда, в частности, имеем

т. е. площадь параллелограмма, построенного на диагоналях данного параллелограмма, равна удвоенной площади этого параллелограмма.
С помощью векторного произведения удобно формулировать легко проверяемый критерий коллинеарности двух векторов а и b:

Векторное произведение в координатной форме
Пусть

Перемножая векторно эти равенства и используя свойства векторного произведения, получим сумму девяти слагаемых:

Из определения векторного произведения следует, что для ортов  справедлива следующая «таблица умножения»:
справедлива следующая «таблица умножения»:

Поэтому из формулы (3) получаем
 (с сохранением порядка следования букв
(с сохранением порядка следования букв  ).
).
Для удобства запоминания формула (4) записывается в виде определителя третьего порядка (см. гл. XVII) 
Из формулы (4) вытекает, что

Геометрически формула (6) дает квадрат площади параллелограмма, построенного на векторах  .
.
Пример №28
Найти площадь треугольника с вершинами А (1, 1, 0), В (1,0, 1) и С (0, 1, 1).
Решение:
Площадь S треугольника ABC равна 1/2 площади параллелограмма, построенного на векторах  (рис. 187). Используя формулы для проекций направленных отрезков, имеем
(рис. 187). Используя формулы для проекций направленных отрезков, имеем 
 отсюда
отсюда 
Следовательно,
Смешанное произведение векторов
Определение: Под смешанным (или векторно-скалярным) произведением векторов  понимается число
понимается число

Построим параллелепипед П (рис. 188), ребрами которого, исходящими из общей вершины О, являются векторы .
Тогда  представляет собой площадь параллелограмма, построенного на векторах
представляет собой площадь параллелограмма, построенного на векторах  , т.е. площадь основания параллелепипеда.
, т.е. площадь основания параллелепипеда. 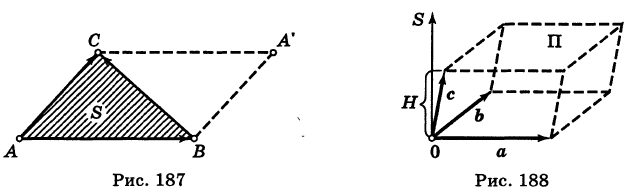
Высота этого параллелепипеда  , очевидно, равна
, очевидно, равна

где  и знак плюс соответствует острому углу
и знак плюс соответствует острому углу 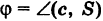 , а знак минус — тупому углу ф. В первом случае векторы
, а знак минус — тупому углу ф. В первом случае векторы  образуют правую тройку, а во втором — левую тройку.
образуют правую тройку, а во втором — левую тройку.
На основании определения скалярного произведения имеем

где V — объем параллелепипеда, построенного на векторах . Отсюда
т. е. смешанное произведение трех векторов равно объему V параллелепипед а у построенного на этих векторах, взятому со знаком плюсу если эти векторы образуют правую тройку, и со знаком минус, если они образуют левую тройку.
Справедливы следующие основные свойства смешанного произведения векторов.
1)Смешанное произведение не меняется при циклической перестановке его сомножителей, т.е.

Действительно, в этом случае не изменяется ни объем параллелепипеда П, ни ориентация его ребер.
2)При перестановке двух соседних множителей смешанное произведение меняет свой знак на обратный, т. е.

Это следует из того, что перестановка соседних множителей, сохраняя объем параллелепипеда, изменяет ориентацию тройки векторов, т.е. правая тройка переходит в левую, а левая — в правую.
С помощью смешанного произведения получаем необходимое и достаточное условие компланарности трех векторов :
abc = 0
(объем параллелепипеда равен нулю). Если
то, используя выражения в координатах для векторного и скалярного произведений векторов, получаем
 т. e.
т. e. 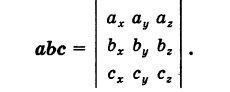
- Прямая – понятие, виды и её свойства
- Плоскость – определение, виды и правила
- Кривые второго порядка
- Евклидово пространство
- Логарифм – формулы, свойства и примеры
- Корень из числа – нахождение и вычисление
- Теория множеств – виды, операции и примеры
- Числовые множества
Координаты вектора в декартовой системе координат (ДСК)
Для начала дадим определение координат вектора в заданной системе координат. Чтобы ввести данное понятие, определим что мы называем прямоугольной или декартовой системой координат.
Прямоугольная система координат представляет из себя прямолинейную систему координат с взаимно перпендикулярными осями на плоскости или в пространстве.
С помощью введения прямоугольной системы координат на плоскости или в трехмерном пространстве становится возможным описывание геометрических фигур вместе с их свойствами при помощи уравнений и неравенств, то есть использовать алгебраические методы при решении геометрических задач.
Тем самым, мы можем привязать к заданной системе координат векторы. Это значительно расширит наши возможности при решении определенных задач
Прямоугольная система координат на плоскости обычно обозначается O x y , где O x и O y – оси коорднат. Ось O x называют осью абсцисс, а ось O y – осью ординат (в пространстве появляется ещё одна ось O z , которая перпендикулярна и O x и O y ).
Итак, нам дана прямоугольная декартова система координат O x y на плоскости если мы отложим от начала координат векторы i → и j → , направление которых соответственно совпадет с положительными направлениями осей O x и O y , и их длина будет равна условной единице, мы получим координатные векторы. То есть в данном случае i → и j → являются координатными векторами.
Координатные векторы
Векторы i → и j → называются координатными векторами для заданной системы координат.
Откладываем от начала координат произвольный вектор a → . Опираясь на геометрическое определение операций над векторами, вектор a → может быть представлен в виде a → = a x · i → + a y · j → , где коэффициенты a x и a y – единственные в своем роде, их единственность достаточно просто доказать методом от противного.
Разложение вектора
Разложением вектора a → по координатным векторам i → и j → на плоскости называется представление вида a → = a x · i → + a y · j → .
Коэффициенты a x и a y называются координатами вектора в данной системе координат на плоскости.
Координаты вектора в данной системе координат принято записывать в круглых скобках, через запятую, при этом заданные координаты следует отделять от обозначения вектора знаком равенства. К примеру, запись a → = ( 2 ; – 3 ) означает, что вектор a → имеет координаты ( 2 ; – 3 ) в данной системе координат и может быть представлен в виде разложения по координатным векторам i → и j → как a → = 2 · i → – 3 · j → .
Следует обратить внимание, что порядок записи координат, имеет важное значение, если вы запишите координаты вектора в другом порядке, вы получите совершенно другой вектор.
Опираясь на определения координат вектора и их разложения становится очевидным, что единичные векторы i → и j → имеют координаты ( 1 ; 0 ) и ( 0 ; 1 ) соответственно, и они могут быть представлены в виде следующих разложений i → = 1 · i → + 0 · j → ; j → = 0 · i → + 1 · j → .
Также имеет место быть нулевой вектор 0 → с координатами ( 0 ; 0 ) и разложением 0 → = 0 · i → + 0 · j → .
Равные и противоположные векторы
Векторы a → и b → равны тогда, когда их соответствующие координаты равны.
Противоположным вектором называется вектор противоположный данному.
Отсюда следует, что координаты такого вектора будут противоположны координатам данного вектора, то есть, – a → = ( – a x ; – a y ) .
Все вышеизложенное можно аналогично определить и для прямоугольной системы координат, заданной в трехмерном пространстве. В такой системе координат имеет место быть тройка координатных векторов i → , j → , k → , а произвольный вектор a → раскладывается не по двум, а уже по трем координатам, причем единственным образом и имеет вид a → = a x · i → + a y · j → + a z · k → , а коэффициенты этого разложения ( a x ; a y ; a z ) называются координатами вектора в данной (трехмерной) системе координат.
Следовательно, координатные векторы в трехмерном пространстве принимают также значение 1 и имеют координаты i → = ( 1 ; 0 ; 0 ) , j → = ( 0 ; 1 ; 0 ) , k → = ( 0 ; 0 ; 1 ) , координаты нулевого вектора также равны нулю 0 → = ( 0 ; 0 ; 0 ) , и в таком случае два вектора будут считаться равными, если все три соответствующие координаты векторов между собой равны a → = b → ⇔ a x = b x , a y = b y , a z = b z , и координаты противоположного вектора a → противоположны соответствующим координатам вектора a → , то есть, – a → = ( – a x ; – a y ; – a z ) .
Координаты радиус-вектора точки
Чтобы ввести данное определение, требуется показать в данной системе координат связь координат точки и координат вектора.
Пусть нам дана некоторая прямоугольная декартова система координат O x y и на ней задана произвольная точка M с координатами M ( x M ; y M ) .
Вектор O M → называется радиус-вектором точки M .
Определим, какие координаты в данной системе координат имеет радиус-вектор точки
Вектор O M → имеет вид суммы O M → = O M x → + O M y → = x M · i → + y M · j → , где точки M x и M y это проекции точки М на координатные прямые Ox и Oy соответственно (данные рассуждения следуют из определения проекция точки на прямую), а i → и j → – координатные векторы, следовательно, вектор O M → имеет координаты ( x M ; y M ) в данной системе координат.
Иначе говоря, координаты радиус-вектора точки М равны соответствующим координатам точки М в прямоугольной декартовой системе координат.
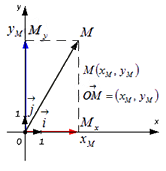
Аналогично в трехмерном пространстве радиус-вектор точки M ( x M ; y M ; z M ) разлагается по координатным векторам как O M → = O M x → + O M y → + O M z → = x M · i → + y M · j → + z M · k → , следовательно, O M → = ( x M ; y M ; z M ) .
learnopengl. Урок 1.7 — Трансформации
Теперь мы знаем как создавать объекты, раскрашивать их и накладывать на них текстуры, но они все еще довольно скучны, поскольку являются статическими объектами. Мы можем попробовать заставить их двигаться изменяя координаты вершин для каждого кадра, но это довольно муторно и требует процессорных вычислений. Есть гораздо более удобный способ для совершения трансформаций над объектом — это применение матриц. Но это не значит, что мы сейчас будем разговаривать про кунг фу и искусственный цифровой мир.
Часть 2. Базовое освещение
Часть 3. Загрузка 3D-моделей
Часть 4. Продвинутые возможности OpenGL
Часть 5. Продвинутое освещение
Матрицы — это очень мощные математические конструкции, которые поначалу пугают, но стоит к ним привыкнуть и они сразу станут крайне полезными. Во время обсуждения матриц требуется также немного углубиться в математику. Также для более склонных к математике читателей я оставлю ссылки на дополнительные ресурсы по этой теме.
Как бы то ни было, для полного понимания трансформаций мы, во первых, должны разобраться с векторами. Основная задача этой главы — дать вам основные математические знания, которые нам понадобятся позже.
Вектора
В самом простом определении, вектора — это не более чем направления. У вектора может быть направление и магнитуда (также иногда называется модулем или длиной). Вы можете представлять себе вектора в качестве направлений на карте сокровищ: “Сделайте 10 шагов налево, теперь 3 шага на север и теперь 5 шагов направо”. В данном примере “налево” — это направление, а “10 шагов” — это длина вектора. Направления на этой карте сокровищ составляются из 3 векторов. Вектора могут иметь любую размерность, но чаще всего используются двухкомпонентные и четырехкомпонентные вектора. Если вектор двухкомпонентный, то он описывает направление на плоскости (или на 2D графике), если вектор трехкомпонентный, то он описывает направление в трехмерном мире.
Ниже вы можете видеть 3 вектора, каждый из которых представлен в виде (x, y) в качестве стрелок на 2D графике. Поскольку более интуитивно представлять вектора в 2D (чем в 3D), то вы можете думать о 2D векторах, как о 3D векторах, но с нулевой z координатой. До тех пор, пока вектор описывает направление — позиция вектора не меняет его значения. На графике можно увидеть, что вектора v и w одинаковы, хотя из позиции отличаются:
Когда математики описывают вектора, они предпочитают использовать символы нижнего регистра с небольшой черточкой сверху. Пример:
Поскольку вектора зачастую описывают направление — то иногда их тяжело представить в виде позиции. Обычно мы визуализируем вектор следующим образом: мы устанавливаем центр в (0, 0, 0), а затем указываем направление, описанное точкой. Таким образом получается позиционный вектор (также мы можем взять за центр другую точку, а потом сказать “Этот вектор указывает на точку в пространстве из этой точки”). Позиционный вектор (3, 5) будет указывать на точку (3, 5) на графе с основанием (0, 0). С помощью векторов мы можем описывать как направления так и позиции в двухмерном и трехмерном пространствах.
Также мы можем производить над векторами некоторые математические действия.
Скалярные векторные операции
Скаляр — это одно число (или однокомпонентный вектор, если вы хотите продолжать работать с векторами). Во время сложения/вычитания/умножения или деления вектора на скаляр мы просто складываем/вычитаем/умножаем или делим каждый элемент вектора на этот скаляр. Пример:
Где вместо сложения может быть вычитание, умножение или деление.
Обратный вектор
Обращение (отрицание) вектора — это получение вектора, чье направление противоположно исходному. Обратный вектор для вектора, указывающего на северо-восток, будет вектор, указывающий на юго-запад. Для обращения вектора мы просто умножаем вектор на -1. Пример:
Сложение и вычитание
Сложение двух векторов производится покомпонентно. Пример:
Визуально сумма векторов v=(4,2) и k=(1,2) выглядит так:
Также как и с обычным сложением и вычитанием, вычитание векторов — это тоже сложение, но с обратным вторым вектором:
Вычитание векторов друг из друга порождают вектор, который является разницей в позициях операндов:
Длина
Для получения длины (модуля) вектора мы используем теорему Пифагора, которые вы, возможно, помните со школы. Вектор образует треугольник, если представить его компоненты в качестве сторон треугольника:
Поскольку длина сторон (x, y) известна, и мы хотим узнать длину гипотенузы — то мы делаем это следующим образом:
Где ||v|| — это длина вектора v. Такая формула легко расширяется в 3D добалением z^2. Пример расчета длины:
Вычисленное значение: 4.47
Также существует специальный вид векторов, называемый единичными векторами. Особенность таких векторов в том, что их длина всегда равна 1. Мы можем преобразовать любой вектор в единичный делением этого вектора на его длину:
Такой вектор называется нормализованным. Единичные векторы обозначаются с небольшой крышей над буквой. С ними, также, проще работать, поскольку нам приходится заботиться только о направлении такого вектора.
Умножение вектора на вектор
Умножение двух векторов выполняется довольно странно. Нормальное умножение не применимо, поскольку оно не имеет визуального смысла, но у нас есть 2 специфических подхода, из которых можно выбирать во время умножения: первый — скалярное произведение, которое изображается как точка, а второе — векторное произведение, которое изображается как крест.
Скалярное произведение
Скалярное произведение двух векторов эквивалентно скалярному произведению длин этих векторов, умноженное на косинус угла между ними. Если это предложение сбило вас с толку, то посмотрите на формулу:
Где угол между векторами описан как тета. Почему это может быть интересно? Что же, представим если вектора v и k являются единичными векторами. Соответственно формула сокращается до:
Теперь скалярное произведение определяет только угол между двумя векторами. Вы возможно помните, что функция cos становится 0, с углом в 90 градусов ну и 1 с углом 0. Это позволяет легко проверять ортогональны ли вектора или параллельны друг другу (ортогональность означает, что вектора прямоугольны). Если хотите узнать больше про sin или cosine, то рекомендую видео Khan Academy про базовую тригонометрию.
Вы также можете вычислить угол между двумя неединичными векторами, но для этого вам придется разделить результат на длины этих векторов, чтобы остаться только с cos.
Так как же считать скалярное произведение? Скалярное произведение — это умножение компонентов векторов и последующее сложение результатов. Пример:
Для вычисления угла между векторами нам потребуется обратить функцию косинуса (cos^-1) в данном случае — это 143.1 градуса. Таким образом мы эффективно вычислили угол между этими двумя векторами. Скалярное произведение очень полезно во время работы со светом.
Векторное произведение
Векторное произведение возможно только в трехмерном пространстве и принимает на вход два непараллельных вектора, а возвращает вектор, который ортогонален входным. Если входные вектора ортогональны друг другу, то векторное произведение создаст 3 ортогональных вектора. Далее вы узнаете, почему это может быть полезно. Следующее изображение показывает как это выглядит трехмерном пространстве:
В отличии от других операций, векторное произведение не очень интуитивно без углубления в линейную алгебру, так что лучше просто запомнить формулу. Ниже представлено векторное произведение между двумя ортогональными векторами A и B.
Как вы можете видеть, в этой формуле не очень много смысла. В любом случае после всех этих шагов вы получите вектор, который будет ортогонален входным.
Матрицы
Теперь, после того как мы обсудили почти все на счет векторов, настало время углубиться в матрицы. Матрица, обычно, это четырехугольних из набора чисел, символов и/или выражений. Вот пример матрицы 2х3:
Доступ к элементам матрицы осуществляется с помощью (i,j), где i — это строка, а j — это столбец. Вот почему матрица выше называется 2х3 (3 столбца и 2 строки). Такая система — обратна той, что используется в 2D графах (x, y). Для получения значения 4 из матрицы выше, мы должны указать индекс (2, 1) (вторая строка, первый столбец).
Матрицы, по факту, ничего более чем четырехугольные массивы математических выражений. Они также обладают очень приятным набором математических свойств и, также как и вектора, имеют несколько операций — сложение, вычитание и умножение.
Сложение и вычитание
Сложение матрицы со скаляром выполняется следующим образом:
Скаляр просто прибавляется во всем элементам матрицы. Тоже самое происходит и при вычитании:
Сложение и вычитание между двумя матрицами выполняется поэлементно. Таким образом операции сложения и вычитания могут быть применены только к матрицам одинакового размера. Пример:
Тоже самое, только с вычитанием:
Умножение матрицы на скаляр
Также как сложение и вычитание, умножение матрицы на скаляр производится умножением каждого элемента матрицы на скаляр. Пример:
Умножение матриц
Умножение матриц не очень сложное, но и не такое простое. Умножение имеет несколько ограничений:
- Вы можете умножать только матрицы, где число столбцов первой совпадает с числом строк второй матрицы.
- Умножение матриц не коммутативно. A * B != B * A.
Вот пример умножения двух матриц 2х2:
Сейчас, возможно вы пытаетесь понять, что же тут вообще происходит? Умножение матриц — это комбинация из нормального умножения и сложения с использованием строк левой матрицы со столбцами правой матрицы. Следующее изображение должно внести немного ясности:
В начале мы берем верхнюю строку левой матрицы и левый столбец правой матрицы. Выбранные нами строка и столбец определяет то, какой элемент результирующей матрицы мы собираемся рассчитать. Если бы мы взяли первую строку левой матрицы, то мы собираемся работать с верхней строкой результирующей матрицы, затем мы выбираем столбец в правой матрице, он определяет то, с каким столбцом результирующей матрицы мы работаем. Для вычисления нижнего-правого элемента мы должны выбрать нижнюю строку левой матрицы и правый столбец правой матрицы.
Для вычисления результирующего значения мы перемножаем элементы строки и столбца с помощью обычного умножения. Результаты умножения затем складываются и мы получаем результат. Вот оттуда и идет первое ограничение.
В результате получается матрица размером (n, m), где n — количество строк в левой матрице, а m — количество столбцов в правой матрице.
Если у вас возникла проблема — то не волнуйтесь. Просто продолжайте вычислять руками и возвращайтесь к этому уроку, когда возникают сложности. Вскоре умножение матриц будет на автомате.
Давайте закроем вопрос умножения матриц одним большим примером. Для представления алгоритма использованы цвета. Для тренировки попробуйте сами посчитать результат, а затем сравнить с результатом в примере.
Как вы можете видеть умножение матриц довольно муторный процесс с большим количеством мест, где можно ошибиться. И эти проблемы лишь растут при увеличении размеров. Если вы все еще жаждите больше математических свойств матриц я крайне рекомендую видео Khan Academy.
Умножение матрицы на вектор
Мы уже использовали вектора в прошлых уроках. Мы использовали их, чтобы представлять позиции, цвета и текстурные координаты. Теперь давайте немного углубимся в кроличью нору и расскажем, что вектор — это на самом деле просто Nx1 матрица, где N — это количество компонентов вектора. Если вы чуть подумаете об этом — это имеет смысл. Вектора, прямо как матрицы — массив чисел, но только с 1 колонкой. И как же нам поможет эта информация? Что же, если у нас есть матрица MxN мы сможем ее умножить на Nx1 вектор, так как количество столбцов матрицы равно количеству строк вектора.
Но зачем нам вообще уметь умножать матрицу на вектор? Довольно много различных 3D/2D трансформаций можно выполнить, умножая матрицу на вектор, получая измененный вектор. Если вы все еще не уверены в том, что полностью понимаете текст выше, то вот немного примеров:
Единичная матрица
В OpenGL обычно работают с матрицами трансформации размерами 4х4 по той причине, что большинство векторов имеет 4 компонента. Самая простая матрица трансформации которую можно обсудить — это единичная матрица. Единичная матрица — это NxN матрица, заполненная нулями, но с 1 по диагонали. Как мы можете заметить эта матрица совершенно не изменяет вектор:
Вектор выглядит нетронутым. Это становится очевидно из правил умножения: первый результирующий элемент — это каждый элемент первой строки матрицы, умноженные на каждый элемент вектора. Поскольку каждый элемент строки равен 0, кроме первого — то мы получаем 1 * 1 + 0 * 2 + 0 * 3 + 0 * 4 = 1. Тоже самое применяется и к остальным 3 элементам вектора.
Вы можете спросить, зачем вообще может понадобится матрица трансформации, которая ничего не трансформирует? Единичная матрица зачастую является отправной точкой для генерации других матриц трансформации и если мы углубимся в линейную алгебру, это также очень удобная матрица для доказательства теорем и решения линейных уравнений.
Матрица масштабирования
Когда мы масштабируем вектор — мы увеличиваем длину стрелки на величину масштабирования, сохраняя направление. Пока мы работаем в 2 или 3 размерностях мы можем определить масштабирование вектором из 2 или 3 величин, каждая из которых масштабирует одну из осей (x, y или z).
Давайте попробуем масштабировать вектор v = (3,2). Мы будем масштабировать вектор по оси x на 0.5, что сделает его в 2 раза уже; и масштабируем вектор по оси y на 2, что увеличит высоту в 2 раза. Давайте посмотрим как будет выглядеть если мы масштабируем вектор на (0.5, 2). Запишем результат в виде s.
Помните, что OpenGL зачастую работает в 3D пространстве, соответственно для 2D можно оставить Z координату, равную 1. Операция масштабирования, которую мы только что выполнили, является неоднородной, поскольку величина масштабирования для каждой оси различается. Если бы величина масштабирования была бы одинаковой — то такое преобразование называется однородным.
Давайте построим матрицу трансформации которая выполнит для нас масштабирование. Мы уже увидели на единичной матрице, что диагональный элемент будет умножен на соответствующий элемент вектора. Что если мы заменим единицы в единичной матрице на тройки? В таком случае мы умножим все элементы вектора на это значение. Соответственно если мы представим величины масштабирования как (S1, S2, S3) то мы сможем определить матрицу масштабирования для любого вектора (x, y, z):
Заметьте, что 4 элемент вектора равняется 1. Этот компонент обозначается как w и будет потом использован для других задач.
Матрица сдвига
Сдвиг — это процесс добавления одного вектора к другому для получения нового вектора с другой позицией, то-есть сдвиг вектора на основании вектора сдвига. Мы уже обсуждали сложение векторов, поэтому для вас это не будет чем-то новым.
Также как и с матрицей масштабирования в матрице 4х4 есть несколько позиций для выполнения требуемых операций, для сдвига — это верхние 3 элемента четвертой колонки. Если мы представим вектор сдвига как (Tx, Ty, Tz) — то мы можем определить матрицу сдвига следующим образом:
Это работает, потому что все значения вектора умножаются на w компонент вектора и складываются с начальным значениями. Это было бы невозможно при использовании матриц 3х3.
Гомогенные координаты
Компонента вектора w также называется гомогенной координатой. Для получения 3D вектора из гомогенной координаты мы делим x, y и z координаты на w. Обычно этого не замечают, так как w большую часть времени равна 1.0. Использование гомогенных координат имеет несколько преимуществ: они позволяют нам выполнять сдвиги на 3D векторах (без w компоненты это было бы невозможно) и в следующей главе мы используем значение w для создания 3D визуализаций.
Также когда гомогенная координата равна 0 — то вектор считается вектором направления, так как вектор с компонентой w равной 0 не может быть сдвинут.
С матрицей сдвига мы можем двигать объекты по всем 3 направлениям (x, y, z), что делает эту матрицу крайне полезной для наших задач.
Матрица вращения
Последние пару трансформаций были довольно просты для понимания и представления в 2D или 3D пространстве, но вращения немного более заковыристые. Если вы хотите узнать как же именно эти матрицы формируются — то я рекомендую видео Khan Academy про линейную алгебру.
Для начала давайте определим что вообще такое — вращение вектора. Вращение в 2D и 3D определяется углом. Угол может выражаться в углах или в радианах, в которых полный оборот — это 360 градусов или 2Pi соответственно. Я предпочитаю работать с градусами, поскольку они более логичны для меня.
Большинство вращательных функций требует угол в радианах, но благо преобразование из одной системы в другую выполнить довольно просто:
Градусы = радианы * (180.0f / PI)
Радианы = градусы * (PI / 180.0f)
Где PI примерно 3.14159265359
Вращение на половину круга — требует от нас вращения на 360/2 = 180 градусов. Вращение на 1/5 направо требует от нас вращение на 360/5 = 72 градуса направо. Вот пример обычного 2D вектора, где v повернут на 72 градуса направо от k.
Вращение в 3D описывается углом и осью вращения. Угол определяет то насколько вектор будет повернут относительно данной оси. При вращении 2D векторов в 3D мире, к примеру, мы установим ось вращения — Z.
С помощью тригонометрии мы можем преобразовывать вектора в повернутые на определенный угол. Обычно это делается хитрой комбинацией sin и cos функций. Обсуждение того, как генерируется матрицы трансформации — выходит за пределы нашего урока.
Матрица вращения определена для каждой оси в 3D пространстве, где угол показан как тета.
Матрица вращения вокруг оси X:
Матрица вращения вокруг оси Y:
Матрица вращения вокруг оси Z:
С помощью матриц вращения мы можем вращать наши вектора по одной из трех осей. Также можно совмещать их, например в начале повернуть по X оси, а потом по Y. Правда такой подход быстро приведет к проблеме, называемый проблемой шарнирного замка (Gimbal Lock). Мы не будем вдаваться в детали, но лучше использовать вращение по конкретной оси, например (0.662, 0.2, 0.722) (заметьте, что это единичный вектор), вместо того, чтобы совмещать вращения по конкретным осям. Матрица для таких преобразований существует и выглядит она следующим образом, где (Rx, Ry, Rz) — это ось вращения:
Математические обсуждения на счет генерации такой матрицы выходят за рамки этого урока. Просто держите в голове, что даже такая матрица не решает проблему шарнирного замка полность (ее просто сложнее получить). Для того, чтобы полностью решить эту проблему нам придется работать с вращениями с помощью кватернионов, которые не просто безопаснее, но еще и гораздо дружелюбнее с точки зрения вычислений. Как бы то ни было обсуждение кватернионов отведено в более поздний урок.
Комбинирование матриц
Для того, чтобы достичь максимальной полезности использования матриц для трансформаций мы должны комбинировать матрицы трансформации в одну матрицу. Давайте посмотрим, сможем ли мы сгенерировать матрицу трансформации, которая будет в себя включать несколько трансформаций. Например у нас есть вектор (x, y, z) и мы хотим масштабировать его в 2 раза и сдвинуть на (1, 2, 3). Для этого нам потребуются матрицы масштабирования и смещения. В результате мы получим что-то вроде:
Заметьте, что во время умножения матриц мы в начале выполняем сдвиг, а потом масштабирование. Умножение матриц не коммутативно, что означает, что порядок умножения важен. Во время умножения матриц правая матрица умножается на вектор, поэтому вам надо читать умножения справа налево. Рекомендуется в начале масштабировать, затем вращать и в конце сдвигать, во время объединения матриц, в ином случае они могут отрицать друг-друга. Например если вы в начале выполните сдвиг, а затем масштабирование, то матрица сдвига тоже будет масштабировать!
В итоге матрица трансформации применяется следующим образом:
Отлично, вектор масштабирован в 2 раза и смещен на (1, 2, 3).
На практике
После того, как мы обсудили всю теорию настало время применять ее на практике. OpenGL не имеет встроенной поддержки матричных или векторных преобразований, поэтому нам придется использовать собственные математические класса и функции. В этих уроках мы абстрагируемся от тонких математических деталей и просто используем готовые математические библиотеки. К счастью уже есть простая в использовании и заточенная под OpenGL математическая библиотека, под названием GLM.
GLM это аббревиатура от OpenGL Mathematics. Эта библиотека является заголовочной, что означает, что нам достаточно подключить требуемые заголовочные файлы. Не нужно заморачиваться ни с линковкой ни с компиляцией. GLM можно скачать с официального сайта. Скопируйте корневую директорию с заголовочными файлами в вашу папку includes и можно начинать.
Большая часть функциональности GLM можно найти в 3 заголовочных файлах:
Давайте посмотрим, сможем ли мы применить наши знания в преобразованиях для сдвига вектора (1, 0, 0) на (1, 1, 0) (заметьте, что мы обозначили из как glm::vec4 с гомогенной координатой равной 1.0):
В начале мы создали вектор названный vec с помощью встроенного в GLM векторного класса. Затем мы определяем mat4, которая является единичной матрицей 4х4. Затем мы создаем матрицу трансформации, передавая нашу единичную матрицу в функцию glm::translate, вместе с вектором сдвига.
Затем мы умножаем наш вектор на матрицу трансформации и выводим результат. Если вы все еще помните как работает матрица сдвига — то вы понимаете, что результирующий вектор должен быть (1+1, 0+1, 0+0), который равен (2, 1, 0). Код выше выводит 210, что означает, что матрица сдвига сделала свою работу.
Давайте попробуем сделать нечто более интересное и попробуем масштабировать, а затем повернуть объект из прошлого урока. В начале мы повернем контейнер на 90 градусов против часовой стрелки. Затем масштабируем его на 0.5 для того, чтобы уменьшить его в 2 раза. Давайте построим матрицу трансформации для этого.
В начале мы уменьшаем контейнер на 0.5, по каждой оси, а затем поворачиваем контейнер на 90 градусов по Z координате. Заметьте, что текстура также повернулась. Поскольку мы передаем матрицу в каждую из GLM функций, GLM автоматически перемножает матрицы, в результате получая матрицу трансформации.
Некоторые версии GLM принимают углы в радианах, а не в градусах. Если у вас такая версия — то преобразуйте градусы в радианы с помощью glm::radians(90.0f).
Следующий большой вопрос — это как передать матрицу трансформации в шейдер? Ранее мы уже говорили, что GLSL имеет тип mat4. Так что нам осталось принять mat4 в качестве uniform переменной и умножить вектор позиции на эту матрицу.
В GLSL также имеются типы mat2 и mat3, которые предоставляют такие же операции, что и вектора. Все затронутые в этой статье операции доступны в матричных типах.
Мы добавили uniform и умножили позиционный вектор на трансформационную матрицу перед тем как передать ее в gl_Position. Наш контейнер теперь должен стать меньше в 2 раза и повернуться на 90 градусов. Но нам все еще надо передать трансформационную матрицу в шейдер?
В начале мы получаем позицию uniform переменной и затем отправляем в нее данные матрицы с помощью функции glUniform с постфиксом Matrix4fv. Первый аргумент должен быть позицией переменной. Второй аргумент сообщает OpenGL сколько матриц мы собираемся отправлять, в нашем случае 1. Третий аргумент говорит требуется ли транспонировать матрицу. OpenGL разработчики часто используют внутренних матричный формат, называемый column-major ordering, который используется в GLM по умолчанию, поэтому нам не требуется транспонировать матрицы, мы можем оставить GL_FALSE. Последний параметр — это, собственно, данные, но GLM не хранит данные точно так как OpenGL хочет их видеть, поэтому мы преобразовываем их с помощью value_ptr.
Мы создали матрицу трансформации, объявили uniform в вершинном шейдере, и отправили матрицу в шейдере с помощью которой мы корректируем вершинные координаты. В результате должно получиться что-то вроде этого:
Отлично! Наш контейнер действительно повернут налево и стал в 2 раза меньше, так что трансформация прошла успешно. А теперь давайте заставим вращаться наш контейнер в реальном времени, а также передвинем его в нижний правый угол. Для того, чтобы это сделать придется производить вычисления при каждой итерации основного цикла. Мы используем функцию GLFW для получения времени, чтобы менять угол со временем:
Держите в голове, что раньше мы могли объявить матрицу трансформации где угодно, но теперь мы создаем ее при каждой итерации, чтобы мы могли обновлять вращение на каждый кадр. Это значит, что мы должны пересоздавать матрицу трансформации на каждой итерации игрового цикла. Обычно, когда на сцене несколько объектов, то их матрицы трансформации пересоздаются с новыми значениями при каждой итерации отрисовки.
Теперь мы вращаем объект вокруг центра (0, 0, 0), а после этого сдвигаем повернутую версию в нижний-правый угол экрана. Помните, что реальная последовательность применения трансформаций читается в обратном порядке: даже в коде мы в начале сдвигаем, а потом поворачиваем, то трансформации применяются в обратном порядке, в начале поворот, затем сдвиг. Понимание всех этих трансформаций и того как они влияют на объекты довольно затруднительно. Попробуйте поэкспериментировать с трансформациями и вы быстро с ними свыкнитесь.
Если вы все сделали правильно — то вы получите что-то вроде этого:
Вот и все. Сдвинутый контейнер, поворачивающийся с течением времени, и все это выполнено с помощью одной матрицы трансформации! Теперь вы можете видеть, почему матрицы настолько сильны в графическом мире. Мы можем определить безграничное количество трансформаций и совмещать их в одну матрицу для последующего повторного использования. Использование подобных трансформаций в вершинном шейдере позволяет нам не менять вершинные данные, что сохраняет нам процессорное время, поскольку нам не требуется отправлять данные в буфер.
Если вам не удалось получить правильный результат или вы где-то застряли — то взгляните на исходный код вместе с вершинным и фрагментным шейдерами.
В следующем уроке мы обсудим как использовать матрицы для определения различных координатных пространств для наших вершин. Это будет новым шагом в мир 3D графики в реальном времени!
Геометрия для новичков. Часть 1: координаты и векторы – теория
Внимание! Этот документ ещё не опубликован.
О чем данная статья
В данной статье дается теоретическое описание векторов, координат векторов и операций над ними.
На кого рассчитана статья
Прежде чем читать эту статью, нужно знать:
- что такое прямоугольная система координат и координаты точки на плоскости
- что такое теорема Пифагора
Введение
Зачем нужны координаты точек в играх
В любой игре положение игрового объекта задается координатами какой-либо точки, привязанной к этому объекту, т.е. эта точка перемещается вместе с объектом. Например, мы можем задать координаты объектов в «Супер Марио» следующим образом:

На этом рисунке крупные черные точки – это точки, привязанные к игровым объектам. Координаты этих точек мы и будем считать координатами игровых объектов.
Итак, на этом рисунке:
- координаты Марио равны (-0.5, -2)
- координаты улитки равны (3, -2)
- координаты кубика равны (4, 1)
Пример координат вектора

Я намеренно не написал конкретные значения для координат точек – пусть они будут произвольными.
Зададим себе вопрос «Как нужно изменить начальные координаты Марио, что получить конечные?» Чтобы ответить на этот вопрос, нам нужно найти пару чисел (x, y), таких, чтобы:
Ax + x = Bx
Ay + y = By
Решая эти 2 уравнения, получаем:
x = Bx – Ax
y = By – Ay
Пара (x, y) в нашей задаче является координатами вектора перемещения Марио. Но это – лишь конкретный пример координат вектора. Что такое вектор и что такое его координаты в общем случае? Сейчас узнаем.
Векторы
Что такое направленный отрезок

Стрелка показывает, что А – начало отрезка, а B – конец.
Что такое вектор

Что у этих отрезков общего? Хм, пожалуй 2 вещи:
- Направление
- Длина
Так вот, вектор – это как раз и есть совокупность направления и длины.
Направленный отрезок – не вектор, который мы изучаем в геометрии. Направленный отрезок задает, или как еще говорят, представляет вектор. Но это – не вектор.
В нашем примере направленный отрезок представляет вектор . Разницу в черточках наверху заметили? Еще часто вектор обозначают 1 буквой, например:
Примечание: о тонкостях приведенного мной определения – в конце статьи.
Равенство векторов
Если задуматься, все направленные отрезки одинаковой длины, которые лежат на параллельных прямых и указывают в одну сторону, имеют одинаковое направление и длину. Следовательно, все эти направленные отрезки представляют один и тот же вектор. Из этого следует определение равенства 2 векторов:
Два вектора и , представленные направленными отрезками и  называются равными, если:
называются равными, если:
- и лежат на параллельных прямых
- и направлены в одну сторону
- и имеют одинаковую длину
Из данного определения следует, что при параллельном переносе произвольный направленный отрезок продолжает представлять тот же вектор, что он представлял до переноса. Это свойство активно используется для операций над векторами.
Длина вектора
Коллинеарные векторы

На рисунке любая пара из векторов , , является коллинеарными векторами
Если отрезки, представляющие коллинеарные векторы, имеют одинаковое направления, то векторы называют сонаправленными:

Пишут: 
Если отрезки, представляющие коллинеарные векторы, имеют противоположное направления, то векторы, представленные данными отрезками, называют противоположно направленными:

Пишут: 
Нулевой вектор
Единичные векторы
 =1
=1
Обратный вектор

Арифметические операции над векторами
- Вектор можно умножать на число. Вектор
 , умноженный на число, записывается как k*. Вектор будет сонаправлен (противоположно направлен) с вектором , если k – положительное (отрицательное) число. Вектор k* будет иметь длину |k|*||:
, умноженный на число, записывается как k*. Вектор будет сонаправлен (противоположно направлен) с вектором , если k – положительное (отрицательное) число. Вектор k* будет иметь длину |k|*||:
|k*| = |k|*||
k* , если k>0
k* , если k 0, такое, что:
|k * |=1
Т.е. в результате нормализации мы получаем единичный вектор, сонаправленный с исходным вектором
Важно: нулевой вектор НЕЛЬЗЯ нормализовать, так как для любого числа k:
|k* | = |k|*|| = k * 0 = 0
| = |k|*|| = k * 0 = 0
Итак, как же найти это число k?
Распишем |k * | по определению:
|k * | = |k| * || = k * || = 1
Здесь мы убрали с k знак модуля, так как по определению k > 0.
Итак:
k * || = 1
Из этого следует, что:
k = 1 / ||
Т.е. чтобы нормализовать произвольный ненулевой вектор, нам нужно разделить вектор на его длину.
Координаты вектора
Вроде бы из примера, приведенного в начале статьи, все понятно: координаты вектора – разность координат конца и начала направленного отрезка, представляющего вектор.
Но это не так. Действительно, значения координат вектора численно равны этой разности. Но определение координат вектора в корне отличается от определения координат точки.
Разложение вектора по 2 неколлинеарным векторам
В геометрии доказывается следующий факт.
Ecли мы возьмем 2 неколлинеарных вектора и ,
то для каждого вектора можно подобрать 2 числа k и s, для которых выполняется равенство:
= k* + s*
Теперь возьмем в качестве таких неколлинеарных векторов и следующие векторы:
- вектор
 – направление – вдоль оси Ox, длина равна 1
– направление – вдоль оси Ox, длина равна 1 - вектор
 – направление – вдоль оси Oy, длина равна 1
– направление – вдоль оси Oy, длина равна 1

Векторы и называют координатными векторами.
Определение координат вектора
= x* + y*
то пара чисел (x, y) будет называться координатами вектора .
Часто пишут:
= (x, y)
Эта запись означает, что вектор имеет координаты x и y.
Арифметические операции над координатами векторов
– = (-ax, -ay)
Координаты вектора, умноженного на число, равны координатам исходного вектора, умноженными на это число:
k* = (k*ax, k*ay)
Пусть у нас есть 2 произвольных вектора =(ax, ay) и =(bx, by). Тогда:
- кoординаты суммы 2 векторов равны сумме x- и y-координат векторов:
+ = (ax + bx, ay + by) - как следствие из предыдущих свойств, координаты разности 2 векторов равны разности координат этих векторов:
– = (ax – bx, ay – by)
Т.е. арифметика для координат векторов – такая же, как и для обычных чисел, только все считается покоординатно.
Радиус-вектор
Можно доказать, что численные значения координат точки совпадают со значения координат ее радиус-вектора. Здесь примем это как факт:
=(Ax, Ay)
где (Ax, Ay) – координаты точки A
Связь между координатами вектора и координатами концов отрезка
если – направленный отрезок, представляющий вектор , то значения координат вектора (x, y) вычисляются по формуле:
(x, y) = (Bx – Ax, By – Ay)
где (Ax, Ay), (Bx, By) – координаты точек А и B соответственно.
Докажем это.
Мы можем записать простое равенство для произвольного вектора :
= –
Заметим, что и – радиус векторы.
Из равенства значений координат точки и радиус-вектора и предыдущей формулы следует, что:
(x, y) = (Bx – Ax, By – Ay)
Нахождение длины вектора по его координатам
Пусть у нас есть вектор , представленный отрезком . Координаты вектора равны (x, y).
Чтобы найти длину вектора через его координаты, воспользуемся теоремой Пифагора и равенством:
= +
По теореме Пифагора:
AC = || = |x|,
СB = || = |y|
то в итоге получаем равенство:
Заключение
Применению векторов в реальных задачах игровой разработки будет посвящена следующая моя статья. В ней практически не будет математики и будет много программирования.
Здесь же я описал то, что будет необходимо для понимания практических приемов использования векторов.
Если не иметь представления, как связаны координаты точек и координаты векторов, очень сложно понять, как работают алгоритмы определения расстояний от точки до геометрической фигуры, алгоритмы обнаружения столкновений и т.д.
Так что не жалейте, если вы (о ужас!) кое-что запомнили из «всей этой математики». Все это вам пригодится очень скоро, обещаю.
Литература
Атанасян Л.С., Бутузов В.Ф., Кадомцев С.Б., Позняк Э.Г., Юдина И.И. «Геометрия», 7-9 классы»
Главы: «Векторы», «Метод координат».
PS: корректность определения вектора в статье
Вся хитрость в том, что существует несколько определений вектора даже в рамках геометрии.
Направленный отрезок – тоже вектор, так называемый фиксированный вектор. Но нужно учитывать один важный факт – 2 фиксированных вектора равны тогда и только тогда, когда их концы и начала совпадают. А это не то определение равенства 2 векторов, что дает учебник геометрии.
Определение вектора, данное в этой статье – определение так называемого свободного вектора.
Каждый свободный вектор – это множество фиксированных векторов, которые имеют равную длину и одинаковое направление.
Именно это определение учебник геометрии и пытается дать в неявном виде, когда вводит понятие равенства векторов. Но здесь возникает нестыковка – учебник объясняет, как работать со свободными векторами, изначально дав определение фиксированного вектора.
Надеюсь, вышесказанное объясняет, почему я привел в данной статье “свое” определение вектора.
[spoiler title=”источники:”]
http://habr.com/ru/post/319144/
http://gamedev.ru/code/articles/geometry_for_beginners_1
[/spoiler]
Для начала дадим определение координат вектора в заданной системе координат. Чтобы ввести данное понятие, определим что мы называем прямоугольной или декартовой системой координат.
Прямоугольная система координат представляет из себя прямолинейную систему координат с взаимно перпендикулярными осями на плоскости или в пространстве.
С помощью введения прямоугольной системы координат на плоскости или в трехмерном пространстве становится возможным описывание геометрических фигур вместе с их свойствами при помощи уравнений и неравенств, то есть использовать алгебраические методы при решении геометрических задач.
Тем самым, мы можем привязать к заданной системе координат векторы. Это значительно расширит наши возможности при решении определенных задач
Прямоугольная система координат на плоскости обычно обозначается Oxy, где Ox и Oy – оси коорднат. Ось Ox называют осью абсцисс, а ось Oy – осью ординат (в пространстве появляется ещё одна ось Oz, которая перпендикулярна и Ox и Oy).
Итак, нам дана прямоугольная декартова система координат Oxy на плоскости если мы отложим от начала координат векторы i→ и j→ , направление которых соответственно совпадет с положительными направлениями осей Ox и Oy , и их длина будет равна условной единице, мы получим координатные векторы. То есть в данном случае i→ и j→ являются координатными векторами.
Координатные векторы
Векторы i→ и j→ называются координатными векторами для заданной системы координат.
Откладываем от начала координат произвольный вектор a→ . Опираясь на геометрическое определение операций над векторами, вектор a→ может быть представлен в виде a→=ax·i→+ay·j→ , где коэффициенты ax и ay – единственные в своем роде, их единственность достаточно просто доказать методом от противного.
Разложение вектора
Разложением вектора a→ по координатным векторам i→ и j→ на плоскости называется представление вида a→=ax·i→+ay·j→.
Коэффициенты ax и ay называются координатами вектора в данной системе координат на плоскости.
Координаты вектора в данной системе координат принято записывать в круглых скобках, через запятую, при этом заданные координаты следует отделять от обозначения вектора знаком равенства. К примеру, запись a→=(2;-3) означает, что вектор a→ имеет координаты (2;-3) в данной системе координат и может быть представлен в виде разложения по координатным векторам i→ и j→ какa→=2·i→-3·j→.
Следует обратить внимание, что порядок записи координат, имеет важное значение, если вы запишите координаты вектора в другом порядке, вы получите совершенно другой вектор.
Опираясь на определения координат вектора и их разложения становится очевидным, что единичные векторы i→ и j→ имеют координаты (1;0) и (0;1) соответственно, и они могут быть представлены в виде следующих разложений i→=1·i→+0·j→; j→=0·i→+1·j→.
Также имеет место быть нулевой вектор 0→ с координатами (0;0) и разложением 0→=0·i→+0·j→.
Равные и противоположные векторы
Векторыa→иb→равны тогда, когда их соответствующие координаты равны.
Противоположным вектором называется вектор противоположный данному.
Отсюда следует, что координаты такого вектора будут противоположны координатам данного вектора, то есть, -a→=(-ax;-ay).
Все вышеизложенное можно аналогично определить и для прямоугольной системы координат, заданной в трехмерном пространстве. В такой системе координат имеет место быть тройка координатных векторов i→,j→,k→, а произвольный вектор a→ раскладывается не по двум, а уже по трем координатам, причем единственным образом и имеет вид a→=ax·i→+ay·j→+az·k→, а коэффициенты этого разложения (ax;ay;az) называются координатами вектора в данной (трехмерной) системе координат.
Следовательно, координатные векторы в трехмерном пространстве принимают также значение 1 и имеют координаты i→=(1;0;0) , j→=(0;1;0), k→=(0;0;1), координаты нулевого вектора также равны нулю 0→=(0;0;0) , и в таком случае два вектора будут считаться равными, если все три соответствующие координаты векторов между собой равныa→=b→⇔ax=bx, ay=by, az=bz , и координаты противоположного вектора a→ противоположны соответствующим координатам вектора a→ , то есть,-a→=(-ax;-ay; -az) .
Координаты радиус-вектора точки
Чтобы ввести данное определение, требуется показать в данной системе координат связь координат точки и координат вектора.
Пусть нам дана некоторая прямоугольная декартова система координат Oxy и на ней задана произвольная точка M с координатами M(xM;yM).
Вектор OM→ называется радиус-вектором точки M.
Определим, какие координаты в данной системе координат имеет радиус-вектор точки
Вектор OM→ имеет вид суммы OM→=OMx→+OMy→=xM·i→+yM·j→, где точки Mx и My это проекции точки М на координатные прямые Ox и Oy соответственно (данные рассуждения следуют из определения проекция точки на прямую), а i→ и j→ – координатные векторы, следовательно, вектор OM→ имеет координаты (xM;yM) в данной системе координат.
Иначе говоря, координаты радиус-вектора точки М равны соответствующим координатам точки М в прямоугольной декартовой системе координат.
Аналогично в трехмерном пространстве радиус-вектор точки M(xM;yM;zM) разлагается по координатным векторам как OM→=OMx→+OMy→+OMz→=xM·i→+yM·j→+zM·k→, следовательно, OM→=(xM;yM;zM).

Преподаватель математики и информатики. Кафедра бизнес-информатики Российского университета транспорта
Вспомним, как мы находили координаты вектора на
плоскости.
Пользуясь тем, что любой вектор можно разложить по
двум неколлинеарным векторам, на осях мы задавали единичные векторы. Таким
образом, любой вектор можно разложить по данным единичным векторам, а
координатами вектора являются коэффициенты этого разложения.
Так же вам уже известно, что любой вектор пространства
можно выразить через 3 некомпланарных вектора, то есть векторы, не лежащие в
одной плоскости.
Изобразим прямоугольную систему координат Охуz.
На каждой из положительных осей от начала координат отложим единичные векторы.
Буквой i
обозначим единичный вектор оси Оx,
буквой j — единичный вектор оси Оy,
буквой k — единичный вектор оси Оz.
Определение:
Векторы i,
j, k
будем называть координатными векторами.
Понятно, что они являются некомпланарными. И
поэтому любой вектор пространства можно разложить по единичным векторам i,
j, k.
Причём коэффициенты разложения х, у и z
определяются единственным образом.
Коэффициенты х, у и z
называют
координатами вектора р в данной системе координат. Координаты
вектора будем записывать в фигурных скобках в последовательности х, у, z.
Задание: Пользуясь
разложениями векторов по координатным векторам, записать их координаты.
Решение:
Задание: пользуясь
координатами векторов, запишем их разложения по координатным векторам i,
j, k.
Решение:
Задача: В
прямоугольном параллелепипеде 𝑂𝐴 =
2, 𝑂𝐵 =
3, а ОО1 = 2. Найти координаты векторов 𝑂𝐴1,
𝑂𝐵1,
𝑂𝑂1,
𝑂𝐶,
𝑂𝐶1,
𝐵𝐶1,
𝐴𝐶1
и 𝑂1 𝐶.
Решение:
После выполнения этого задания можно сделать вывод
о том, что если вектор лежит в некоторой из координатных плоскостей или
параллелен ей, а также лежит или параллелен некоторой из координатных осей, то
его соответствующие координаты равны нулю.
Если вектор лежит в координатной плоскости Оху или
параллелен ей, то его аппликата равна нулю. Если вектор принадлежит или
параллелен координатной плоскости Охz,
то его ордината равна нулю. Если же вектор принадлежит или параллелен
координатной плоскости Оyz,
то его абсцисса равна нулю.
В случае, когда вектор лежит на оси координат Оx
или параллелен ей, то ордината и аппликата равны нулю. Если вектор принадлежит
или параллелен оси Оy, то абсцисса и
аппликата равны нулю. И если вектор принадлежит или параллелен оси Оz,
то абсцисса и ордината равны нулю.
А сейчас поговорим о противоположных векторах. Из
планиметрии известно, что координаты противоположных векторов
противоположны. Это утверждение верно и для векторов в пространстве.
Задание: найти
координаты векторов противоположных данным векторам.
Решение:
Также из курса планиметрии вам известны правила
определения координат вектора суммы, вектора разности и произведения
вектора на число.
Такие же правила действую и для координат векторов в
пространстве.
Задание: 𝑎 ⃗{−1;0;3},
𝑏 ⃗{5;−2;1}
и 𝑐 ⃗{1;7;−2}.
Определить координаты векторов:
1) 𝑎 ⃗+𝑐 ⃗;
2) 𝑏 ⃗−𝑎 ⃗;
3) 2𝑎 ⃗+𝑏 ⃗;
4) 1/2 𝑎 ⃗−2𝑏 ⃗+𝑐 ⃗.
Решение:
Так, используя правила определения координат вектора
суммы, разности и произведения вектора на число, мы определили координаты
данных векторов.
Итоги:
Сегодня мы ввели понятие координатных векторов i,
j, k.
И, пользуясь тем, что любой вектор пространства можно выразить через 3
некомпланарных вектора, записали, что коэффициенты х, у и z
называют координатами вектора p
в данной системе координат.
Мы отметили, что все координаты нулевого вектора равны
нулю. Равные векторы имеют равные координаты, а координаты противоположных
векторов противоположны.
Также мы записали правила, которые позволяют находить
координаты любого вектора, представленного в виде алгебраической суммы данных
векторов, координаты которых известны.
Голосование за лучший ответ
Марина Повзык
Мастер
(1929)
12 лет назад
(-2,3) – надо менять знаки
Efik
Ученик
(147)
12 лет назад
(-2,3) – нужно знаки менять
Business Software
Гуру
(3630)
12 лет назад
умножай координаты на -1
