Скалярное произведение векторов
Угол
между векторами ![]()
может
принимать значения от 0 до 180 градусов
(от 0 до ![]()
радиан)
включительно. Аналитически данный факт
записывается в виде двойного
неравенства: ![]()
либо ![]()
(в
радианах).
В
литературе значок угла ![]()
часто
пропускают и пишут просто ![]()
.
Определение: Скалярным
произведением двух векторов ![]()
и ![]()
называется
ЧИСЛО, равное произведению длин этих
векторов на косинус угла между ними:
![]()
Обозначение: скалярное
произведение обозначается через ![]()
или
просто ![]()
.
Результат
операции является ЧИСЛОМ:
Умножается вектор на вектор, а получается
число. Действительно, если длины
векторов ![]()
–
это числа, косинус угла – число, то их
произведение ![]()
тоже
будет числом.
Пример
Найти
скалярное произведение векторов
и
,
если ![]()
Решение:
![]()
Ответ: ![]()
Угол между векторами и значение скалярного произведения
Длины
ненулевых векторов всегда положительны: ![]()
,
поэтому знак может зависеть только от
значения косинуса.
1)
Если угол между
векторами острый: ![]()
(от
0 до 90 градусов), то ![]()
,
и скалярное
произведение будет положительным: ![]()
.
Особый случай: если векторы сонаправлены,
то угол между ними считается нулевым ![]()
,
и скалярное произведение также будет
положительным. Поскольку ![]()
,
то формула упрощается: ![]()
.
2)
Если угол между
векторами тупой: ![]()
(от
90 до 180 градусов), то ![]()
,
и, соответственно, скалярное
произведение отрицательно: ![]()
.
Особый случай: если векторы направлены
противоположно, то
угол между ними считается развёрнутым: ![]()
(180
градусов). Скалярное произведение тоже
отрицательно, так как ![]()
3)
Если угол между
векторами прямой: ![]()
(90
градусов), то ![]()
и скалярное
произведение равно нулю: ![]()
.
Скалярное
произведение двух векторов равно нулю
тогда и только тогда, когда данные
векторы ортогональны.
Короткая математическая запись: ![]()
Третий
случай имеет большую практическую
значимость, поскольку
позволяет проверить, ортогональны
векторы или нет.
Скалярный квадрат вектора Что будет, если вектор умножить на самого себя?
![]()
Или: ![]()
Число ![]()
называется скалярным
квадратом вектора
,
и обозначатся как ![]()
.
Таким
образом, скалярный
квадрат вектора
равен
квадрату длины данного вектора:
![]()
Из
данного равенства можно получить формулу
для вычисления длины вектора:
![]()
Свойства
скалярного произведения.
Для
произвольных векторов ![]()
и
любого числа
справедливы
следующие свойства:
1) ![]()
–
переместительный или коммутативный закон
скалярного произведения.
2) ![]()
–
распределительный или дистрибутивный закон
скалярного произведения. Попросту,
можно раскрывать скобки.
3) ![]()
–
сочетательный или ассоциативный закон
скалярного произведения. Константу
можно вынести из скалярного произведения.
Пример
Найти
скалярное произведение векторов ![]()
и ![]()
,
если известно, что ![]()
.
Решение:

(1)
Подставляем выражения векторов ![]()
.
(2)
Раскрываем скобки по правилу умножения
многочленов. Раскрыть скобки нам
позволяет дистрибутивное свойство
скалярного произведения.
(3)
В первом и последнем слагаемом компактно
записываем скалярные квадраты векторов: ![]()
.
Во втором слагаемом используем
перестановочность скалярного
произведения: ![]()
.
(4)
Приводим подобные слагаемые: ![]()
.
(5)
В первом слагаемом используем формулу
скалярного квадрата
,
о которой не так давно упоминалось. В
последнем слагаемом, соответственно,
работает та же штука: ![]()
.
Второе слагаемое раскладываем по
стандартной формуле
.
(6)
Подставляем данные условия ![]()
,
и ВНИМАТЕЛЬНО проводим окончательные
вычисления.
Ответ: ![]()
Пример
Найти
длину вектора ![]()
,
если ![]()
.
Решение:

(1)
Поставляем выражение вектора ![]()
.
(2)
Используем формулу длины: ![]()
,
при этом в качестве вектора «вэ» у нас
выступает целое выражение ![]()
.
(3)
Используем школьную формулу квадрата
суммы ![]()
.
(4)
Дальнейшее аналогично действиям из
двух предыдущих задач.
Ответ: ![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Вектор. Скалярное произведение векторов. Угол между векторами.
Скалярным произведением (или внутренним произведением) 2 векторов есть операция с двумя
векторами, итогом чего является число (скаляр), которое не зависит от системы координат и которое
характеризует длины векторов-сомножителей и угол между векторами.
Также скалярным произведением двух векторов называется число, которое
равно произведению модулей 2 векторов на косинус угла между векторами.
Скалярное произведение векторов формула:
Этой операции соответствует умножение длины вектора x на проекцию вектора y на вектор x. Эта
операция зачастую рассматривается как коммутативная и линейная по каждому из сомножителей.
Скалярное произведение векторов ,, обозначается так: (порядок записи сомножителей не имеет
значения, т.е. ).
Еще используются такие обозначения: , , .
В основном имеется ввиду, что скалярное произведение определено положительно, т.е.
при каждом . Если этого не иметь ввиду, то произведение зовется индефинитным
(неопределенным).
Если хотя бы один из 2 векторов или равен нулевому вектору (равен нулю), то .
Свойства скалярного произведения векторов.
1. – симметричность.
2. обозначается и зовется скалярный квадрат.
3. Если , то
4. Если и и и , то . Обратное утверждение тоже соответствует
5. 
6.
7.
Если же векторы и заданы своими координатами: , , то: скалярное
произведение векторов, формула:
Формула для определения длины вектора:
Длина (модуль) вектора, с известными координатами, равен квадратному корню из суммы квадратов
Длина вектора , заданного своими координатами, равна:
Как определить угол между 2 векторами:
Как найти угол между двумя векторами , , формула:
Ежели угол меж двумя векторами острый, то их скалярное произведение имеет положительный знак; если
же угол между двумя векторами тупой, то их скалярное произведение имеет отрицательный знак.
Скалярное произведение двух ненулевых векторов равно нулю, тогда и только тогда, когда эти векторы
ортогональны.
Альтернативное определение скалярного произведения векторов (вычисление скалярного
произведения двух векторов, заданных своими координатами).
Вычислить координаты вектора, если заданы координаты его начала и его конца очень просто. Давайте
рассмотрим этот вопрос:
Пусть есть вектор AB, точка А – это начало вектора, а В – конец, и координаты этих точек приведены ниже:
Исходя из этого, координаты вектора АВ:
Точно так же и в двухмерном пространстве – разница в отсутствии третьих координат.
Итак, предположим, даны два вектора, которые заданы набором координат своих точек:
а) В двухмерном пространстве (плоскость):
Значит, скалярное произведение этих векторов вычислим по формуле:
б) В трехмерном пространстве:
Как и в двухмерном случае, скалярное произведение двух векторов вычисляем по формуле:
Скалярное произведение векторов

О чем эта статья:
11 класс, ЕГЭ/ОГЭ
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
Основные определения
Система координат — способ определить положение и перемещение точки или тела с помощью чисел или других символов.
Координаты — это совокупность чисел, которые определяют положение какого-либо объекта на прямой, плоскости, поверхности или в пространстве. Как найти координаты точки мы рассказали в этой статье.
Скаляр — это величина, которая полностью определяется в любой координатной системе одним числом или функцией.
Вектор — направленный отрезок прямой, для которого указано, какая точка является началом, а какая — концом.
Вектор с началом в точке A и концом в точке B принято обозначать как →AB. Векторы также можно обозначать малыми латинскими буквами со стрелкой или черточкой над ними, вот так: →a.
Скалярное произведение — это операция над двумя векторами, результатом которой является скаляр, то есть число, которое не зависит от выбора системы координат.
Результат операции является число. То есть при умножении вектор на вектор получается число. Если длины векторов |→a|, |→b| — это числа, косинус угла — число, то их произведение |→a|*|→b|*cos∠(→a, →b) тоже будет числом.
Чтобы разобраться в теме этой статьи, нам еще нужно узнать особенности угла между векторами.
Угол между векторами
Угол между векторами ∠(→a, →b) может принимать значения от 0° до 180° градусов включительно. Аналитически это можно записать в виде двойного неравенства: 0°=
2. Если угол между векторами равен 90°, то такие векторы перпендикулярны друг другу.
3. Если векторы направлены в разные стороны, тогда угол между ними 180°.
Также векторы могут образовывать тупой угол. Это выглядит так:
Скалярное произведение векторов
Определение скалярного произведения можно сформулировать двумя способами:
Скалярное произведение двух векторов a и b дает в результате скалярную величину, которая равна сумме попарного произведения координат векторов a и b.
Скалярным произведением двух векторов a и b будет скалярная величина, равная произведению модулей этих векторов, умноженная на косинус угла между ними:
→a * →b = →|a| * →|b| * cosα
Что важно запомнить про геометрическую интерпретацию скалярного произведения:
- Если угол между векторами острый и векторы ненулевые, то скалярное произведение положительно, то есть cosα > 0.
- Если угол между векторами тупой и векторы ненулевые, то скалярное произведение отрицательно, так как cosα
Скалярное произведение в координатах
Вычисление скалярного произведения можно произвести через координаты векторов в заданной плоскости или в пространстве.
Скалярным произведением двух векторов на плоскости или в трехмерном пространстве в прямоугольной системе координат называется сумма произведений соответствующих координат векторов →a и →b.
То есть для векторов →a = (ax, ay), →b = (bx, by) на плоскости в прямоугольной декартовой системе координат формула для вычисления скалярного произведения имеет вид: (→a, →b) = ax*bx + ay*by
А для векторов →a = (ax, ay, az), →b = (bx, by, bz) в трехмерном пространстве скалярное произведение в координатах находится так: (→a, →b) = ax*bx + ay*by + az*bz
Докажем это определение:
Сначала докажем равенства
для векторов →a = (ax, ay), →b = (bx, by) на плоскости, заданных в прямоугольной декартовой системе координат.
Отложим от начала координат (точка О) векторы →OB = →b = (bx, by) и →OA = →a = (ax, ay)
Тогда, →AB = →OB – →OA = →b – →a = (bx – ax, by – ay)
Будем считать точки О, А и В вершинами треугольника ОАВ. По теореме косинусов можно записать:
то последнее равенство можно переписать так:
а по первому определению скалярного произведения имеем
Записывайтесь на наши курсы по математике для учеников с 1 по 11 классы!
Формулы скалярного произведения векторов заданных координатами
Формула скалярного произведения векторов для плоских задач
В плоской задаче скалярное произведение векторов a = и b = можно найти по формуле:
a * b = ax * bx + ay * by
Формула скалярного произведения векторов для пространственных задач
В пространственной задаче скалярное произведение векторов a = и b = можно найти по формуле:
a * b = ax * bx + ay * by + az * bz
Формула скалярного произведения n-мерных векторов
В n-мерном пространстве скалярное произведение векторов a = и b = можно найти по формуле:
a * b = a1 * b1 + a2 * b2 + . + an * bn
Свойства скалярного произведения
Свойства скалярного произведения векторов:
Скалярное произведение вектора самого на себя всегда больше или равно нулю. В результате получается нуль, если вектор равен нулевому вектору.
→0 * →0 = 0
Скалярное произведение вектора самого на себя равно квадрату его модуля:
→a * →a = →∣∣a∣∣2
Операция скалярного произведения коммуникативна, то есть соответствует переместительному закону:
→a * →b = →b * →a
Операция скалярного умножения дистрибутивна, то есть соответствует распределительному закону:
(→a + →b) * →c = →a * →c + →b * →c
Сочетательный закон для скалярного произведения:
(k * →a) * →b = k * (→a * →b)
Если скалярное произведение двух ненулевых векторов равно нулю, то эти векторы ортогональны, то есть перпендикулярны друг другу:
a ≠ 0, b ≠ 0, a * b = 0 a ┴ b
Эти свойства очень легко обосновать, если отталкиваться от определения скалярного произведения в координатной форме и от свойств операций сложения и умножения действительных чисел.
Для примера докажем свойство коммутативности скалярного произведения (→a, →b) = (→b, →a)
По определению (→a, →b) = ax*bx + ay*by и (→b, →a) = bx*ax + by*ay. В силу свойства коммутативности операции умножения действительных чисел, справедливо ax*bx = bx*ax b ay*by = by*ay, тогда ax*bx + ay*by = bx*ax + by*ay.
Следовательно, (→a, →b) = (→b, →a), что и требовалось доказать.
Аналогично доказываются остальные свойства скалярного произведения.
Следует отметить, что свойство дистрибутивности скалярного произведения справедливо для любого числа слагаемых, то есть,
Примеры вычислений скалярного произведения
Пример 1.
Вычислите скалярное произведение двух векторов →a и →b, если их длины равны 3 и 7 единиц соответственно, а угол между ними равен 60 градусам.
У нас есть все данные, чтобы вычислить скалярное произведение по определению:
(→a,→b) = →|a| * →|b| * cos(→a,→b) = 3 * 7 cos60° = 3 * 7 * 1/2 = 21/2 = 10,5.
Ответ: (→a,→b) = 21/2 = 10,5.
Пример 2.
Найти скалярное произведение векторов →a и →b, если →|a| = 2, →|b| = 5, ∠(→a,→b) = π/6.
Используем формулу →a * →b = →|a| * →|b| * cosα.
В данном случае:
→a * →b = →|a| * →|b| * cosα = 2 * 5 * cosπ/6 = 10 * √3/2 = 5√3
Пример 3.
Как найти скалярное произведение векторов →a = 7*→m + 3*→n и →b = 5*→m + 8*→n, если векторы →m и →n перпендикулярны и их длины равны 3 и 2 единицы соответственно.
По свойству дистрибутивности скалярного произведения имеем
Сочетательное свойство позволяет нам вынести коэффициенты за знак скалярного произведения:
В силу свойства коммутативности последнее выражение примет вид
Итак, после применения свойств скалярного произведения имеем
Осталось применить формулу для вычисления скалярного произведения через длины векторов и косинус угла между ними:
Пример 4.
В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, найти косинус угла между прямыми AB1 и BC1.
Введем систему координат.
Если сделать выносной рисунок основания призмы, получим понятный плоскостной рисунок с помощью которого можно легко найти координаты всех интересующих точек.
Пример 5.
а) Проверить ортогональность векторов: →a(1; 2; -4) и →b(6; -1; 1) .
б) Выяснить, будут ли перпендикулярными отрезки KL и MN, если K(3;5), L(-2;0), M(8;-1), N(1;4).
а) Выясним, будут ли ортогональны пространственные векторы. Вычислим их скалярное произведение: →ab = 1*6 + 2*(-1) + (-4)*1 = 0, следовательно
б) Здесь речь идёт об обычных отрезках плоскости, а задача всё равно решается через векторы. Найдем их: →KL(-2-3; 0-5) = →KL(-5; -5), →MN(1-8; 4-(-1)) = →MN(-7;5)
Вычислим их скалярное произведение: →KL*→MN = -5*(-7) + (-5)*5 = 10 ≠ 0, значит, отрезки KL и MN не перпендикулярны.
Обратите внимание на два существенных момента:
- В данном случае нас не интересует конкретное значение скалярного произведения, важно, что оно не равно нулю.
- В окончательном выводе подразумевается, что если векторы не ортогональны, значит, соответствующие отрезки тоже не будут перпендикулярными. Геометрически это очевидно, поэтому можно сразу записывать вывод об отрезках, что они не перпендикулярны.
Ответ: а) →a перпендикулярно →b, б) отрезки KL, MN не перпендикулярны.
Пример 6.
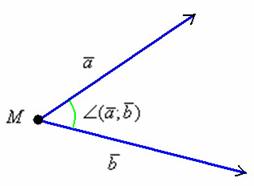
Даны три вершины треугольника A(-1; 0), B(3; 2), C(5; -4). Найти угол при вершине B — ∠ABC.
По условию чертеж выполнять не требуется, но для удобства можно сделать:
Требуемый угол ∠ABC помечен зеленой дугой. Сразу вспоминаем школьное обозначение угла: ∠ABC — особое внимание на среднюю букву B — это и есть нужная нам вершина угла. Для краткости можно также записать просто ∠B.
Из чертежа видно, что угол ∠ABC треугольника совпадает с углом между векторами →BA и →BC, иными словами: ∠ABC = ∠(→BA; →BC).
Вычислим скалярное произведение:
Вычислим длины векторов:
Найдем косинус угла:
Когда такие примеры не будут вызывать трудностей, можно начать записывать вычисления в одну строчку:
Полученное значение не является окончательным, поэтому нет особого смысла избавляться от иррациональности в знаменателе.
Найдём сам угол:
Если посмотреть на чертеж, то результат действительно похож на правду. Для проверки угол также можно измерить и транспортиром.
Ответ: ∠ABC = arccos(1/5√2) ≈1,43 рад. ≈ 82°
Важно не перепутать, что в задаче спрашивалось про угол треугольника, а не про угол между векторами. Поэтому указываем точный ответ: arccos(1/5√2) и приближенное значение угла: ≈1,43 рад. ≈ 82°, которое легко найти с помощью калькулятора.
А те, кому мало и хочется еще порешать, могут вычислить углы ∠A, ∠C, и убедиться в справедливости канонического равенства ∠A + ∠B + ∠C = 180°.
Линейная алгебра для разработчиков игр
Эта статья является переводом цикла из четырёх статей «Linear algebra for game developers», написанных David Rosen и посвящённых линейной алгебре и её применению в разработке игр. С оригинальными статьями можно ознакомиться тут: часть 1, часть 2, часть 3 и часть 4. Я не стал публиковать переводы отдельными топиками, а объединил все статьи в одну. Думаю, что так будет удобнее воспринимать материал и работать с ним. Итак приступим.
Зачем нам линейная алгебра?
Одним из направлений в линейной алгебре является изучение векторов. Если в вашей игре применяется позиционирование экранных кнопок, работа с камерой и её направлением, скоростями объектов, то вам придётся иметь дело с векторами. Чем лучше вы понимаете линейную алгебру, тем больший контроль вы получаете над поведением векторов и, следовательно, над вашей игрой.
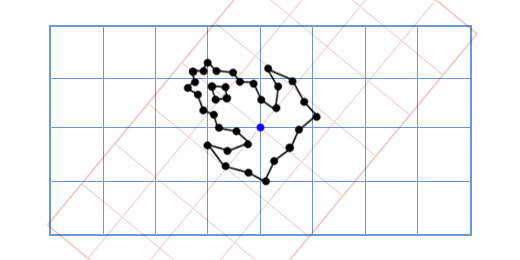
Что такое вектор?
В играх вектора используются для хранения местоположений, направлений и скоростей. Ниже приведён пример двухмерного вектора: 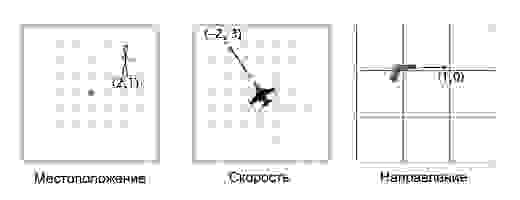
Вектор местоположения (также называемый «радиус-вектором») показывает, что человек стоит в двух метрах восточнее и в одном метре к северу от исходной точки. Вектор скорости показывает, что за единицу времени самолёт перемещается на три километра вверх и на два — влево. Вектор направления говорит нам о том, что пистолет направлен вправо.
Как вы можете заметить, вектор сам по себе всего лишь набор цифр, который обретает тот или иной смысл в зависимости от контекста. К примеру, вектор (1, 0) может быть как направлением для оружия, как показано на картинке, так и координатами строения в одну милю к востоку от вашей текущей позиции. Или скоростью улитки, которая двигается вправо со скоростью в 1 милю в час (прим. переводчика: довольно быстро для улитки, 44 сантиметра в секунду).
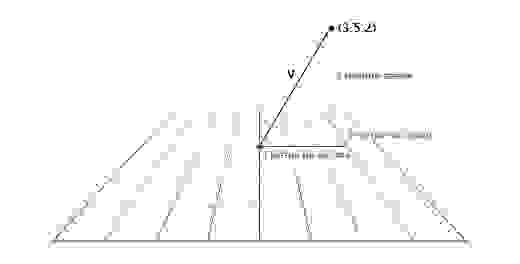
Важно отслеживать единицы измерения. Допустим у нас есть вектор V (3,5,2). Это мало что говорит нам. Три чего, пять чего? В нашей игре Overgrowth расстояния указываются в метрах, а скорости в метрах в секунду. Первое число в этом векторе — это направление на восток, второе — направление вверх, третье — направление на север. Отрицательные числа обозначают противоположные направления, на запад, вниз и на юг. Местоположение, определяемое вектором V (3,5,2), находится в трёх метрах к востоку, в пяти метрах вверху и в двух метрах к северу, как показано на картинке ниже.
Итак, мы изучили основы работы с векторами. Теперь узнаем как вектора использовать.
Сложение векторов
Чтобы сложить вектора, нам надо просто сложить каждую их составляющую друг с другом. Например:
(0, 1, 4) + (3, -2, 5) = (0+3, 1-2, 4+5) = (3, -1, 9)
Зачем нам нужно складывать вектора? Наиболее часто сложение векторов в играх применяется для физического интегрирования. Любой физический объект будет иметь вектора для местоположения, скорости и ускорения. Для каждого кадра (обычно это одна шестидесятая часть секунды), мы должны интегрировать два вектора: добавить скорость к местоположению и ускорение к скорости.
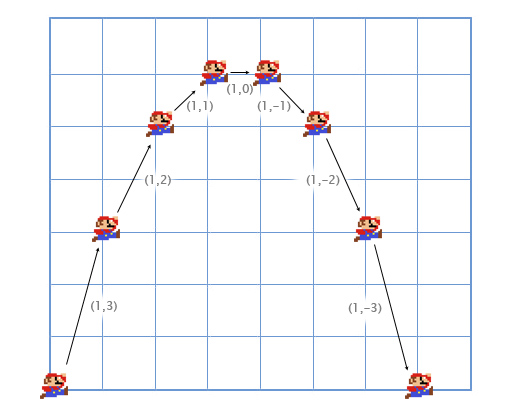
Давайте рассмотрим пример с прыжками Марио. Он начинает с позиции (0, 0). В момент начала прыжка его скорость (1, 3), он быстро двигается вверх и вправо. Его ускорение равно (0, -1), так как гравитация тянет его вниз. На картинке показано, как выглядит его прыжок, разбитый на семь кадров. Чёрным текстом показана его скорость в каждом фрейме.
Давайте рассмотрим первые кадры поподробнее, чтобы понять как всё происходит.
Для первого кадра, мы добавляем скорость Марио (1, 3) к его местоположению (0, 0) и получаем его новые координаты (1, 3). Затем мы складываем ускорение (0, -1) с его скоростью (1, 3) и получаем новое значение скорости Марио (1, 2).
Делаем то-же самое для второго кадра. Добавляем скорость (1, 2) к местоположению (1, 3) и получаем координаты (2, 5). Затем добавляем ускорение (0, -1) к его скорости (1, 2) и получаем новую скорость (1, 1).
Обычно игрок контролирует ускорение игрового персонажа с помощью клавиатуры или геймпада, а игра, в свою очередь, рассчитывает новые значения для скоростей и местоположения, используя физическое сложение (через сложение векторов). Это та-же задача, которая решается в интегральном исчислении, просто мы его сильно упрощаем для нашей игры. Я заметил, что мне намного проще внимательно слушать лекции по интегральному исчислению, думая о практическом его применении, которое мы только что описали.
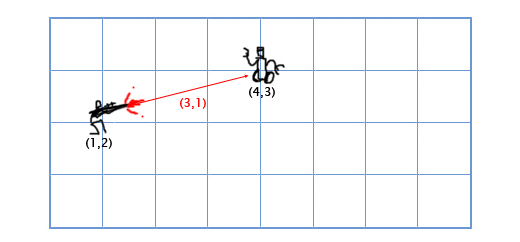
Вычитание векторов
Вычитание рассчитывается по тому-же принципу что и сложение — вычитаем соответствующие компоненты векторов. Вычитание векторов удобно для получения вектора, который показывает из одного местоположения на другое. Например, пусть игрок находится по координатам (1, 2) с лазерным ружьём, а вражеский робот находится по координатам (4, 3). Чтобы определить вектор движения лазерного луча, который поразит робота, нам надо вычесть местоположение игрока из местоположения робота. Получаем:
(4, 3) — (1, 2) = (4-1, 3-2) = (3, 1).
Умножение вектора на скаляр
Когда мы говорим о векторах, мы называем отдельные числа скалярами. Например (3, 4) — вектор, а 5 — это скаляр. В играх, часто бывает нужно умножить вектор на число (скаляр). Например, моделируя простое сопротивление воздуха путём умножения скорости игрока на 0.9 в каждом кадре. Чтобы сделать это, нам надо умножить каждый компонент вектора на скаляр. Если скорость игрока (10, 20), то новая скорость будет:
0.9*(10, 20) = (0.9 * 10, 0.9 * 20) = (9, 18).
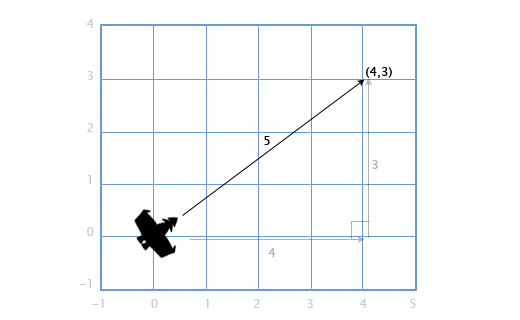
Длина вектора
Если у нас есть корабль с вектором скорости V (4, 3), нам также понадобится узнать как быстро он двигается, чтобы посчитать потребность в экранном пространстве или сколько потребуется топлива. Чтобы сделать это, нам понадобится найти длину (модуль) вектора V. Длина вектора обозначается вертикальными линиями, в нашем случае длина вектора V будет обозначаться как |V|.
Мы можем представить V как прямоугольный треугольник со сторонами 4 и 3 и, применяя теорему Пифагора, получить гипотенузу из выражения: x 2 + y 2 = h 2
В нашем случае — длину вектора H с компонентами (x, y) мы получаем из квадратного корня: sqrt(x 2 + y 2 ).
Итак, скорость нашего корабля равна:
|V| = sqrt(4 2 + 3 2 ) = sqrt(25) = 5
Этот подход используется и для трёхмерных векторов. Длина вектора с компонентами (x, y, z) рассчитывается как sqrt(x 2 + y 2 + z 2 )
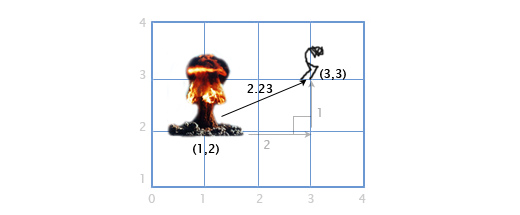
Расстояние
Если игрок P находится в точке (3, 3), а взрыв произошёл в точке E по координатам (1, 2), нам надо определить расстояние между игроком и взрывом, чтобы рассчитать степень ущерба, нанесённого игроку. Это легко сделать, комбинируя две вышеописанных операции: вычитание векторов и их длину.
Мы вычитаем P — E, чтобы получить вектор между ними. А затем определяем длину этого вектора, что и даёт нам искомое расстояние. Порядок следования операндов тут не имеет значения, |E — P| даст тот-же самый результат.
Расстояние = |P — E| = |(3, 3) — (1, 2)| = |(2, 1)| = sqrt(2 2 +1 2 ) = sqrt(5) = 2.23
Нормализация
Когда мы имеем дело с направлениями (в отличие от местоположений и скоростей), важно, чтобы вектор направления имел длину, равную единице. Это сильно упрощает нам жизнь. Например, допустим орудие развёрнуто в направлении (1, 0) и выстреливает снаряд со скоростью 20 метров в секунду. Каков в данном случае вектор скорости для выпущенного снаряда?
Так как вектор направления имеет длину равную единице, мы умножаем направление на скорость снаряда и получаем вектор скорости (20, 0). Если-же вектор направления имеет отличную от единицы длину, мы не сможем сделать этого. Снаряд будет либо слишком быстрым, либо слишком медленным.
Вектор с длиной равной единице называется «нормализованным». Как сделать вектор нормализованным? Довольно просто. Мы делим каждый компонент вектора на его длину. Если, к примеру, мы хотим нормализовать вектор V с компонентами (3, 4), мы просто делим каждый компонент на его длину, то есть на 5, и получаем (3/5, 4/5). Теперь, с помощью теоремы Пифагора, мы убедимся в том, что его длина равна единице:
(3/5) 2 + (4/5) 2 = 9/25 + 16/25 = 25/25 = 1
Скалярное произведение векторов
Что такое скалярное произведение (записывается как •)? Чтобы рассчитать скалярное произведение двух векторов, мы должны умножить их компоненты, а затем сложить полученные результаты вместе
(a1, a2) • (b1, b2) = a1b1 + a2b2
Например: (3, 2) • (1, 4) = 3*1 + 2*4 = 11. На первый взгляд это кажется бесполезным, но посмотрим внимательнее на это:
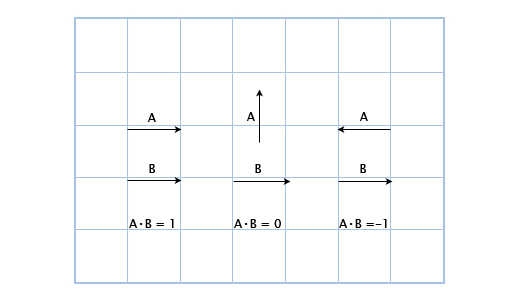
Здесь мы можем увидеть, что если вектора указывают в одном направлении, то их скалярное произведение больше нуля. Когда они перпендикулярны друг другу, то скалярное произведение равно нулю. И когда они указывают в противоположных направлениях, их скалярное произведение меньше нуля.
В основном, с помощью скалярного произведения векторов можно рассчитать, сколько их указывает в одном направлении. И хоть это лишь малая часть возможностей скалярного произведения, но уже очень для нас полезная.
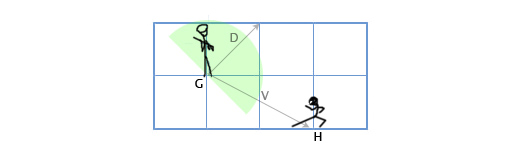
Допустим у нас есть стражник, расположенный в G(1, 3) смотрящий в направлении D(1,1), с углом обзора 180 градусов. Главный герой игры подсматривает за ним с позиции H(3, 2). Как определить, находится-ли главный герой в поле зрения стражника или нет? Сделаем это путём скалярного произведения векторов D и V (вектора, направленного от стражника к главному герою). Мы получим следующее:
V = H — G = (3, 2) — (1, 3) = (3-1, 2-3) = (2, -1)
D•V = (1, 1) • (2, -1) = 1*2 + 1*-1 = 2-1 = 1
Так как единица больше нуля, то главный герой находится в поле зрения стражника.
Мы уже знаем, что скалярное произведение имеет отношение к определению направления векторов. А каково его более точное определение? Математическое выражение скалярного произведения векторов выглядит так:
Где Θ (произносится как «theta») — угол между векторами A и B.
Это позволяет нам найти Θ (угол) с помощью выражения:
Как я говорил ранее, нормализация векторов упрощает нашу жизнь. И если A и B нормализованы, то выражение упрощается следующим образом:
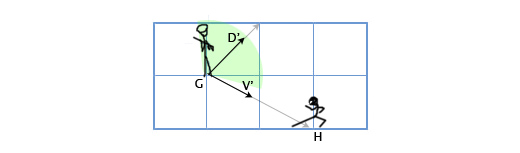
Давайте опять рассмотрим сценарий со стражником. Пусть теперь угол обзора стражника будет равен 120 градусам. Получим нормализованные вектора для направления взгляда стражника (D’) и для направления от стражника к главному герою (V’). Затем определим угол между ними. Если угол более 60 градусов (половина от угла обзора), то главный герой находится вне поля зрения стражника.
D’ = D / |D| = (1, 1) / sqrt(1 2 + 1 2 ) = (1, 1) / sqrt(2) = (0.71, 0.71)
V’ = V / |V| = (2, -1) / sqrt(2 2 + (-1) 2 ) = (2,-1) / sqrt(5) = (0.89, -0.45)
Θ = acos(D’V’) = acos(0.71*0.89 + 0.71*(-0.45)) = acos(0.31) = 72
Угол между центром поля зрения стражника и местоположением главного героя составляет 72 градуса, следовательно стражник его не видит.
Понимаю, что это выглядит довольно сложно, но это потому, что мы всё делаем вручную. В программе это всё довольно просто. Ниже показано как я сделал это в нашей игре Overgrowth с помощью написанных мной С++ библиотек для работы с векторами:
Векторное произведение
Допустим у нас есть корабль с пушками, которые стреляют в правую и в левую стороны по курсу. Допустим, что лодка расположена вдоль вектора направления (2, 1). В каких направлениях теперь стреляют пушки?
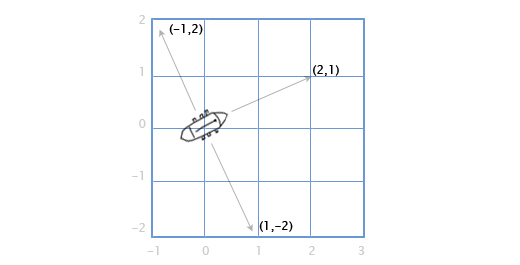
Это довольно просто в двухмерной графике. Чтобы повернуть направление на 90 градусов по часовой стрелке, достаточно поменять местами компоненты вектора, а затем поменять знак второму компоненту.
(a, b) превращается в (b, -a). Следовательно у корабля, расположенного вдоль вектора (2, 1), пушки справа по борту будут стрелять в направлении (1, -2), а пушки с левого борта, будут стрелять в противоположном направлении. Меняем знаки у компонент вектора и получаем (-1, 2).
А что если мы хотим рассчитать это всё для трехмерной графики? Рассмотрим пример с кораблём.
У нас есть вектор мачты M, направленной прямо вверх (0, 1, 0) и направление ветра: север-северо-восток W (1, 0, 2). И мы хотим вычислить вектор направления паруса S, чтобы наилучшим образом «поймать ветер».
Для решения этой задачи мы используем векторное произведение: S = M x W.
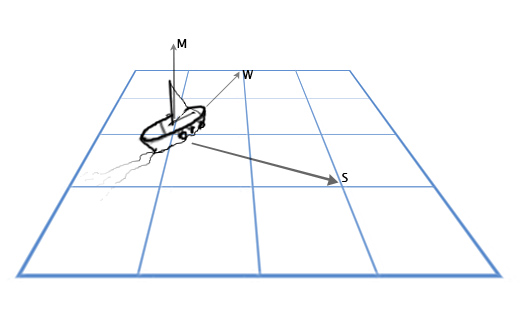
Подставим теперь нужные нам значения:
S = MxW = (0, 1, 0) x (1, 0, 2) = ([1*2 — 0*0], [0*1 — 0*2], [0*0 — 1*1]) = (2, 0, -1)
Для расчётов вручную довольно сложно, но для графических и игровых приложений я рекомендую написать функцию, подобную той, что указана ниже и не вдаваться более в детали подобных расчётов.
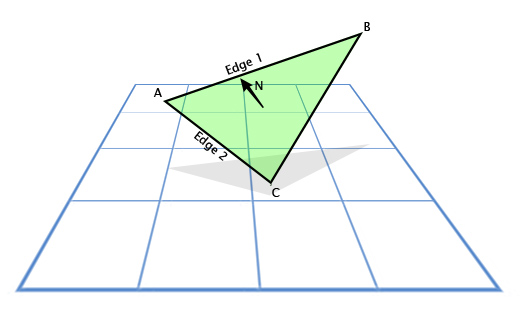
Векторное произведение часто используется в играх, чтобы рассчитать нормали к поверхностям. Направления, в которых «смотрит» та или иная поверхность. Например, рассмотрим треугольник с векторами вершин A, B и С. Как мы найдем направление в котором «смотрит» треугольник, то есть направление перпендикулярное его плоскости? Это кажется сложным, но у нас есть инструмент для решения этой задачи.
Используем вычитание, для определения направления из A в С (C — A), пусть это будет «грань 1» (Edge 1) и направление из A в B (B — A), пусть это будет «грань 2» (Edge 2). А затем применим векторное произведение, чтобы найти вектор, перпендикулярный им обоим, то есть перпендикулярный плоскости треугольника, также называемый «нормалью к плоскости».
Вот так это выглядит в коде:
В играх основное выражение освещённости записывается как N • L, где N — это нормаль к освещаемой поверхности, а L — это нормализованный вектор направления света. В результате поверхность выглядит яркой, когда на неё прямо падает свет, и тёмной, когда этого не происходит.
Теперь перейдем к рассмотрению такого важного для разработчиков игр понятия, как «матрица преобразований» (transformation matrix).
Для начала изучим «строительные блоки» матрицы преобразований.
Базисный вектор
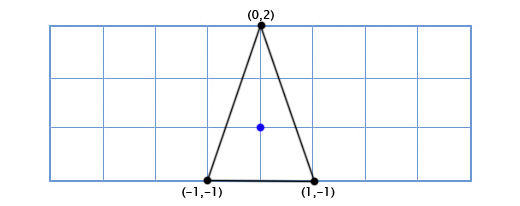
Допустим мы пишем игру Asteroids на очень старом «железе» и нам нужен простой двухмерный космический корабль, который может свободно вращаться в своей плоскости. Модель корабля выглядит так:
Как нам рисовать корабль, когда игрок поворачивает его на произвольный градус, скажем 49 градусов против часовой стрелки. Используя тригонометрию, мы можем написать функцию двухмерного поворота, которая принимает координаты точки и угол поворота, и возвращает координаты смещённой точки:
Применяя эту функцию ко всем трём точкам, мы получим следующую картину:
Операции с синусами и косинусами работают довольно медленно, но так как мы делаем расчёты лишь для трёх точек, это будет нормально работать даже на старом «железе» (прим. переводчика: в случаях, когда предполагается интенсивное использование тригонометрических функций, для ускорения вычислений, в памяти организуют таблицы значений для каждой функции и рассчитывают их во время запуска приложения. Затем при вычислении той или иной тригонометрической функции просто производится обращение к таблице).
Пусть теперь наш корабль выглядит вот так:
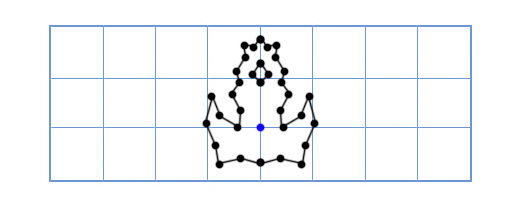
Теперь старый подход будет слишком медленным, так как надо будет поворачивать довольно большое количество точек. Одно из элегантных решений данной проблемы будет звучать так — «Что если вместо поворота каждой точки модели корабля, мы повернём координатную решётку нашей модели?»
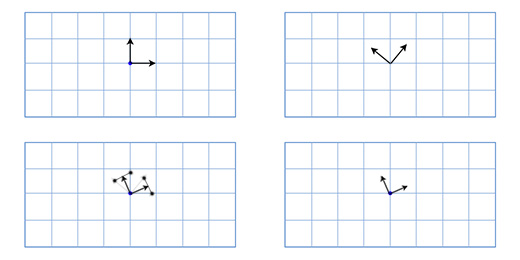
Как это работает? Давайте посмотрим внимательнее, что собой представляют координаты.
Когда мы говорим о точке с координатами (3, 2), мы говорим, что её местоположение находится в трех шагах от точки отсчёта по координатной оси X, и двух шагах от точки отсчёта по координатной оси Y.
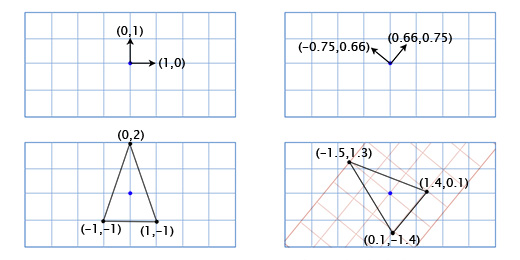
По-умолчанию координатные оси расположены так: вектор координатной оси X (1, 0), вектор координатной оси Y (0, 1). И мы получим расположение: 3(1, 0) + 2(0, 1). Но координатные оси не обязательно должны быть в таком положении. Если мы повернём координатные оси, в это-же время мы повернём все точки в координатной решётке.
Чтобы получить повернутые оси X и Y мы применим тригонометрические функции, о которых говорили выше. Если мы поворачиваем на 49 градусов, то новая координатная ось X будет получена путём поворота вектора (0, 1) на 49 градусов, а новая координатная ось Y будет получена путём поворота вектора (0, 1) на 49 градусов. Итак вектор новой оси X у нас будет равен (0.66, 0.75), а вектор новой оси Y будет (-0.75, 0.66). Сделаем это вручную для нашей простой модели из трёх точек, чтобы убедиться, что это работает так, как нужно:
Координаты верхней точки (0, 2), что означает, что её новое местоположение находится в 0 на новой (повёрнутой) оси X и 2 на новой оси Y:
0*(0.66,0.75) + 2*(-0.75, 0.66) = (-1.5, 1.3)
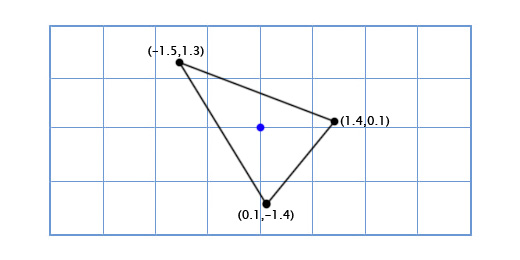
Нижняя левая точка (-1, -1), что означает, что её новое местоположение находится в -1 на повернутой оси X, и -1 на повернутой оси Y:
-1*(0.66,0.75) + -1*(-0.75, 0.66) = (0.1, -1.4)
Нижняя правая точка (1, -1), что означает её новое местоположение находится в 1 на повернутой оси X, и -1 на повернутой оси Y
1*(0.66,0.75) + -1*(-0.75, 0.66) = (1.4, 0.1)
Мы показали, как координаты корабля отображаются в другой координатной сетке с повернутыми осями (или «базисными векторами»). Это удобно в нашем случае, так как избавляет нас от необходимости применять тригонометрические преобразования к каждой из точек модели корабля.
Каждый раз, когда мы изменяем базисные вектора (1, 0) и (0, 1) на (a, b) и (c, d), то новая координата точки (x, y) может быть найдена с помощью выражения:
Обычно базисные вектора равны (1, 0) и (0, 1) и мы просто получаем x(1, 0) + y(0, 1) = (x, y), и нет необходимости заботиться об этом дальше. Однако, важно помнить, что мы можем использовать и другие базисные вектора, когда нам это нужно.
Матрицы
Матрицы похожи на двухмерные вектора. Например, типичная 2×2 матрица, может выглядеть так:
Когда вы умножаете матрицу на вектор, вы суммируете скалярное произведение каждой строки с вектором, на который происходит умножение. Например, если мы умножаем вышеприведённую матрицу на вектор (x, y), то мы получаем:
Будучи записанным по-другому, это выражение выглядит так:
Выглядит знакомо, не так-ли? Это в точности такое-же выражение, которые мы использовали для смены базисных векторов. Это означает, что умножая 2×2 матрицу на двухмерный вектор, мы тем самым меняем базисные вектора. Например, если мы вставим стандартные базисные вектора в (1, 0) и (0, 1) в колонки матрицы, то мы получим:
Это единичная матрица, которая не даёт эффекта, который мы можем ожидать от нейтральных базисных векторов, которые мы указали. Если-же мы повернём базисные вектора на 49-градусов, то мы получим:
Эта матрица будет поворачивать двухмерный вектор на 49 градусов против часовой стрелки. Мы можем сделать код нашей игры Asteriods более элегантным, используя матрицы вроде этой. Например, функция поворота нашего корабля может выглядеть так:
Однако, наш код будет ещё более элегантным, если мы сможем также включить в эту матрицу перемещение корабля в пространстве. Тогда у нас будет единая структура данных, которая будет заключать в себе и применять информацию об ориентации объекта и его местоположении в пространстве.
К счастью есть способ добиться этого, хоть это и выглядит не очень элегантно. Если мы хотим переместиться с помощью вектора (e, f), мы лишь включаем его в нашу матрицу преобразования:
И добавляем дополнительную единицу в конец каждого вектора, определяющего местоположение объекта, например так:
Теперь, когда мы перемножаем их, мы получаем:
(a, c, e) • (x, y, 1) + (b, d, f) • (x, y, 1) + (0, 0, 1) • (x, y, 1)
Что, в свою очередь, может быть записано как:
x(a, b) + y(c, d) + (e, f)
Теперь у нас есть полный механизм трансформации, заключённый в одной матрице. Это важно, если не принимать в расчёт элегантность кода, так как с ней мы теперь можем использовать все стандартные манипуляции с матрицами. Например перемножить матрицы, чтобы добавить нужный эффект, или мы можем инвертировать матрицу, чтобы получить прямо противоположное положение объекта.
Трехмерные матрицы
Матрицы в трехмерном пространстве работают так-же как и в двухмерном. Я приводил примеры с двухмерными векторами и матрицами, так как их просто отобразить с помощью дисплея, показывающего двухмерную картинку. Нам просто надо определить три колонки для базисных векторов, вместо двух. Если базисные вектора это (a,b,c), (d,e,f) and (g,h,i) то наша матрица будет выглядеть так:
Если нам нужно перемещение (j,k,l), то мы добавляем дополнительную колонку и строку, как говорили раньше:
И добавляем единицу [1] в вектор, как здесь:
Вращение в двухмерном пространстве
Так как в нашем случае у нас только одна ось вращения (расположенная на дисплее), единственное, что нам надо знать, это угол. Я говорил об этом ранее, упоминая, что мы можем применять тригонометрические функции для реализации функции двухмерного вращения наподобие этой:
Более элегантно это можно выразить в матричной форме. Чтобы определить матрицу, мы можем применить эту функцию к осям (1, 0) и (0, 1) для угла Θ, а затем включить полученные оси в колонки нашей матрицы. Итак, начнём с координатной оси X (1, 0). Если мы применим к ней нашу функцию, мы получим:
(1*cos(Θ) — 0*sin(Θ), 1*sin(Θ) + 0*cos(Θ)) = (cos(Θ), sin(Θ))
Затем, мы включаем координатную ось Y (0, 1). Получим:
(0*cos(Θ) — 1*sin(Θ), 0*sin(Θ) + 1*cos(Θ)) = (-sin(Θ), cos(Θ))
Включаем полученные координатные оси в матрицу, и получаем двухмерную матрицу вращения:
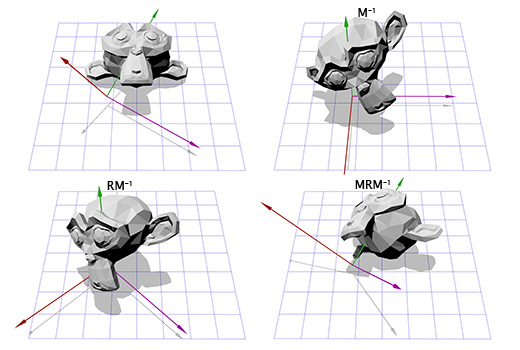
Применим эту матрицу к Сюзанне, мартышке из графического пакета Blender. Угол поворота Θ равен 45 градусов по часовой стрелке.
Как видите — это работает. Но что если нам надо осуществить вращение вокруг точки, отличной от (0, 0)?
Например, мы хотим вращать голову мартышки вокруг точки, расположенной в её ухе:
Чтобы сделать это, мы можем начать с создания матрицы перемещения (translation matrix) T, которая перемещает объект из начальной точки в точку вращения в ухе мартышки, и матрицу вращения R, для вращения объекта вокруг начальной точки. Теперь для вращения вокруг точки, расположенной в ухе, мы можем сперва переместить точку в ухе на место начальной точки, с помощью инвертирования матрицы T, записанной как T -1 . Затем, мы вращаем объект вокруг начальной точки, с помощью матрицы R, а затем применяем матрицу T для перемещения точки вращения назад, к своему исходному положению.
Ниже дана иллюстрация к каждому из описанных шагов:
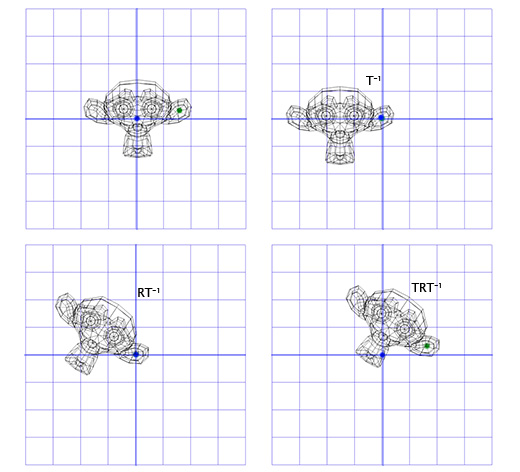
Это важный шаблон, который мы будем применять позднее — применение вращения для двух противоположных трансформаций позволяет нам вращать объект в другом «пространстве». Что очень удобно и полезно.
Теперь рассмотрим трёхмерное вращение.
Трёхмерное вращение
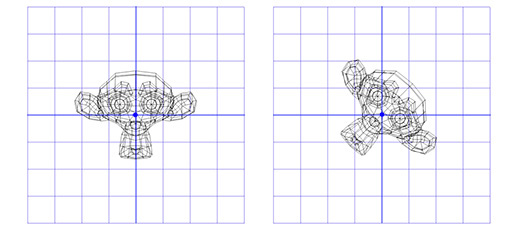
Вращение вокруг оси Z работает по тому-же принципу, что и вращение в двухмерном пространстве. Нам лишь нужно изменить нашу старую матрицу, добавив к ней дополнительную колонку и строку:
Применим эту матрицу к трехмерной версии Сюзанны, мартышки из пакета Blender. Угол поворота Θ пусть будет равен 45 градусов по часовой стрелке.
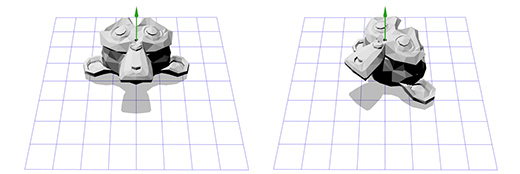
То-же самое. Вращение только вокруг оси Z ограничивает нас, как насчёт вращения вокруг произвольной оси?
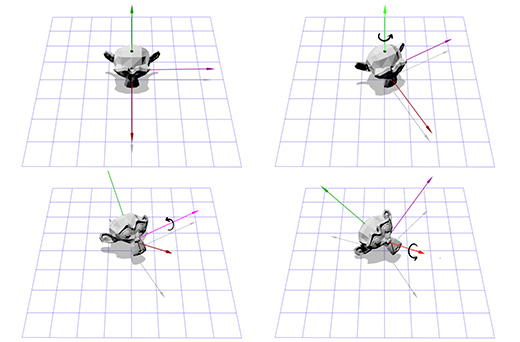
Вращение, определяемое осью и углом (Axis-angle rotation)
Представление вращения, определяемого осью и углом, также известно как вращение в экспоненциальных координатах, параметризованное вращением двух величин. Вектора, определяющего вращение направляющей оси (прямая линия) и угла, описывающего величину поворота вокруг этой оси. Вращение осуществляется согласно правилу правой руки.
Итак, вращение задаётся двумя параметрами (axis, angle), где axis — вектор оси вращения, а angle — угол вращения. Этот приём довольно прост и являет собой отправную точку для множества других операций вращения, с которыми я работаю. Как практически применить вращение, определяемое осью и углом?
Допустим мы имеем дело с осью вращения, показанной на рисунке ниже:
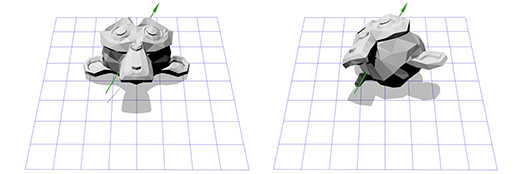
Мы знаем как вращать объект вокруг оси Z, и мы знаем как вращать объект в других пространствах. Итак, нам лишь надо создать пространство, где наша ось вращения будет являться осью Z. И если эта ось будет осью Z, то что будет являться осями X и Y? Займемся вычислениями сейчас.
Чтобы создать новые оси X и Y нам нужно лишь выбрать два вектора, которые перпендикулярны новой оси Z и перпендикулярны друг другу. Мы уже говорили ранее о векторном умножении, которое берёт два вектора и даёт в итоге перпендикулярный им вектор.
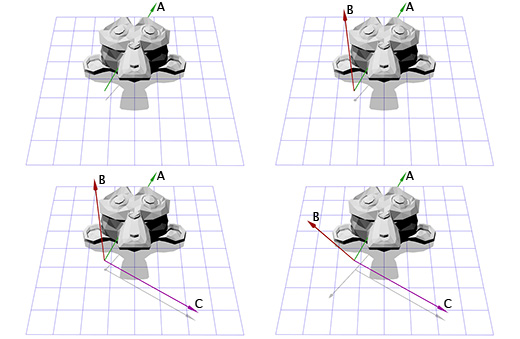
У нас есть один вектор сейчас, это ось вращения, назовём его A. Возьмём теперь случайный другой вектор B, который находится не в том-же направлении, что и вектор A. Пусть это будет (0, 0, 1) к примеру.
Теперь мы имеем ось вращения A и случайный вектор B, мы можем получить нормаль C, через векторное произведение A и B. С перпендикулярен векторам A и B. Теперь мы делаем вектор B перпендикулярным векторам A и C через их векторное произведение. И всё, у нас есть все нужные нам оси координат.
На словах это звучит сложно, но довольно просто выглядит в коде или будучи показанным в картинках.
Ниже показано, как это выглядит в коде:
Тут показана иллюстрация для каждого шага:
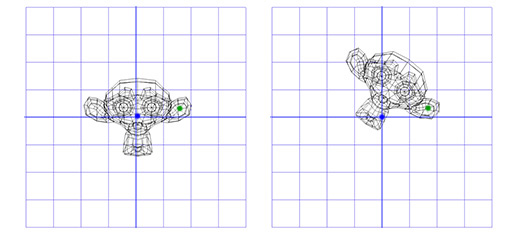
Теперь, имея информацию о новых координатных осях, мы можем составить матрицу M, включив каждую ось как колонку в эту матрицу. Нам надо убедиться, что вектор A является третьей колонкой, чтобы он был нашей новой осью координат Z.
Теперь это похоже на то, что мы делали для поворота в двухмерном пространстве. Мы можем применить инвертированную матрицу M, чтобы переместиться в новую систему координат, затем произвести вращение, согласно матрице R, чтобы повернуть объект вокруг оси Z, затем применить матрицу M, чтобы вернуться в исходное координатное пространство.
Теперь мы можем вращать объект вокруг произвольной оси. В конце концов мы можем просто создать матрицу T = T = M -1 RM и использовать её много раз, без дополнительных усилий с нашей стороны. Есть более эффективные способы конвертирования вращений, определяемых осью и углом во вращения, определяемые матрицами. Просто описанный нами подход показывает многое из того, о чём мы говорили ранее.
Вращение, определяемое осью и углом, возможно, самый интуитивно понятный способ. Применяя его, очень легко инвертировать поворот, поменяв знак у угла, и легко интерполировать, путём интерполяции угла. Однако тут есть серьёзное ограничение, и заключается оно в том, что такое вращение не является суммирующим. То есть вы не можете комбинировать два вращения, определяемых осью и углом в третье.
Вращение, определяемое осью и углом — хороший способ для начала, но оно должно быть преобразовано во что-то другое, чтобы использоваться в более сложных случаях.
Эйлеровские углы
Эйлеровские углы представляют собой другой способ вращения, заключающийся в трёх вложенных вращениях относительно осей X, Y и Z. Вы, возможно, сталкивались с их применением в играх, где камера показывает действие от первого лица, либо от третьего лица.
Допустим вы играете в шутер от первого лица и вы повернулись на 30 градусов влево, а затем посмотрели на 40 градусов вверх. В конце-концов в вас стреляют, попадают, и, в результате удара, камера поворачивается вокруг своей оси на 45 градусов. Ниже показано вращение с помощью углов Эйлера (30, 40, 45).
Углы Эйлера — удобное и простое в управлении средство. Но у этого способа есть два недостатка.
Первый, это вероятность возникновения ситуации под названием «блокировка оси» или «шарнирный замок» (gimbal lock). Представьте, что вы играете в шутер от первого лица, где вы можете посмотреть влево, вправо, вверх и вниз или повернуть камеру вокруг зрительной оси. Теперь представьте, что вы смотрите прямо вверх. В этой ситуации попытка взглянуть налево или направо будет аналогична попытке вращения камеры. Всё что мы можем вы этом случае, это вращать камеру вокруг своей оси, либо посмотреть вниз. Как вы можете представить, это ограничение делает непрактичным применение углов Эйлера в лётных симуляторах.
Второе — интерполяция между двумя эйлеровскими углами вращения не даёт кратчайшего пути между ними.
Например, у вас две интерполяции между двумя одинаковыми вращениями. Первая использует интерполяцию эйлеровского угла, вторая использует сферическую линейную интерполяцию (spherical linear interpolation (SLERP)), чтобы найти кратчайший путь.
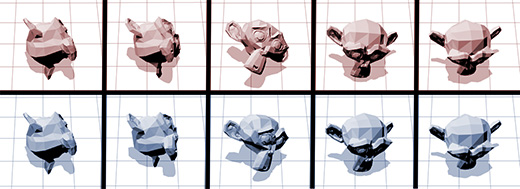
Итак, что-же больше подойдет для интерполяции вращений? Может быть матрицы?
Вращение с помощью матриц
Как мы уже говорили ранее, матрицы вращения хранят в себе информацию о трёх осях. Это означает, что интерполяция между двумя матрицами лишь линейно интерполирует каждую ось. В результате это даёт нам эффективный путь, то так-же привносит новые проблемы. Например, тут показаны два вращения и одно интерполированное полу-вращение:
Как вы можете заметить, интерполированное вращение значительно меньше, чем любое из исходных вращений, и две оси более не перпендикулярны друг другу. Это логично, если вдуматься — середина отрезка, соединяющего любые две точки на сфере будет расположена ближе к центру сферы.
Это в свою очередь порождает известный «эффект фантика» (candy wrapper effect), при применении скелетной анимации. Ниже показана демонстрация этого эффекта на примере кролика из нашей игры Overgrowth (прим. переводчика: обратите внимание на середину туловища кролика).

Вращение, основанное на матричных операциях, очень полезно, так как они могут аккумулировать вращения без всяких проблем, вроде блокировки оси (gimbal lock), и может очень эффективно применяться к точкам сцены. Вот почему поддержка вращения на матрицах встроена в графические карты. Для любого типа трёхмерной графики матричный формат вращения — это всегда итоговый применяемый способ.
Однако, как мы уже знаем, матрицы не очень хорошо интерполируются, и они не столь интуитивно понятны.
Итак, остался только один главный формат вращения. Последний, но тем не менее, важный.
Кватернионы
Что-же такое кватернионы? Если очень кратко, то это альтернативный вариант вращения, основанный на оси и угле (axis-angle rotation), который существует в пространстве.
Подобно матрицам они могут аккумулировать вращения, то есть вы можете составлять из них цепочку вращений, без опаски получить блокировку оси (gimbal lock). И в то-же время, в отличие от матриц, они могут хорошо интерполироваться из одного положения в другое.
Являются-ли кватернионы лучшим решением, нежели остальные способы вращений (rotation formats)?
На сегодняшний день они комбинируют все сильные стороны других способов вращений. Но у них есть два слабых места, рассмотрев которые, мы придём к выводу, что кватернионы лучше использовать для промежуточных вращений. Итак, каковы недостатки кватернионов.
Во-первых кватернионы непросто отобразить на трёхмерном пространстве. И мы вынуждены всегда реализовывать вращение более простым способом, а затем конвертировать его. Во-вторых, кватернионы не могут эффективно вращать точки, и мы вынуждены конвертировать их в матрицы, чтобы повернуть значительное количество точек.
Это означает, что вы скорее всего не начнете или не закончите серию вращений с помощью кватернионов. Но с их помощью можно реализовать промежуточные вращения более эффективно, нежели при применении любого другого подхода.
«Внутренняя кухня» механизма кватернионов не очень понятна и не интересна мне. И, возможно, не будет интересна и вам, если только вы не математик. И я советую вам найти библиотеки, которые работают с кватернионами, чтобы облегчить вам решение ваших задач с их помощью.
Математические библиотеки «Bullet» или «Blender» будут хорошим вариантом для начала.
[spoiler title=”источники:”]
http://skysmart.ru/articles/mathematic/skalyarnoe-proizvedenie-vektorov
http://habr.com/ru/post/131931/
[/spoiler]
Содержание:
- Векторы
- Действия над векторами
- Умножение вектора на число
- Скалярное произведение векторов
- Векторное произведение
- Смешенное произведение векторов
- Разложение вектора по базису
- Действия над векторами, заданными своими координатами
- Проекция вектора на ось
- Проекции вектора на оси координат
- Направляющие косинусы вектора
- Разложение вектора по ортам
- Действия над векторами, заданными в координатной форме
- Вектор – основные определения
- Операции над векторами и их свойства
- Сформулируем и докажем ещё одну важную для решения некоторых задач теорему.
- Координаты вектора
- Скалярное произведение векторов и его свойства
- Векторы и их решение
- Собственные числа и собственные векторы
- Векторная алгебра
- Векторы: основные определения, линейные операции
- Линейные операции над векторами
- Умножения вектора на скаляр
- Основные свойства проекции вектора на ось
- Прямоугольная система координат в пространстве. Координатная и алгебраическая формы задания векторов
- Скалярное, векторное, смешанное произведения векторов
- Векторное произведение двух векторов
- Смешанное произведение векторов, заданных в координатной форме
- Простейшие задачи аналитической геометрии
- Задача об определении площади треугольника
- Задача о деление отрезка в заданном отношении
Векторы
В математике вектором называют величину, которая характеризуется только числом и направлением. Так определённые векторы ещё называют свободными векторами. Примером физических величин, которые имеют векторный характер являются скорость, сила, ускорение. Геометрически вектор — это направленный отрезок, хотя правильней говорить про целый класс направленных отрезков, которые все параллельны между собой, имеют одинаковые длину и направление.

Векторы обозначают малыми латинскими буквами с чертой сверху  , или двумя большими латинскими буквами, которые обозначают его начало и конец, например
, или двумя большими латинскими буквами, которые обозначают его начало и конец, например  . Длина (модуль) вектора — это длина отрезка, который отвечает данному вектору и обозначается
. Длина (модуль) вектора — это длина отрезка, который отвечает данному вектору и обозначается  В зависимости от соотношения длин и направлений различают следующие виды векторов:
В зависимости от соотношения длин и направлений различают следующие виды векторов:


Действия над векторами
Рассмотрим основные действия, определённые над векторами.
1. Сложение векторов. Суммой векторов  называют вектор
называют вектор  , который соединяет начало вектора
, который соединяет начало вектора  с концом вектора
с концом вектора  , при условии, что вектор
, при условии, что вектор  отложен от конца вектора
отложен от конца вектора  . Такой способ сложения векторов называют правилом треугольника.
. Такой способ сложения векторов называют правилом треугольника.

Учитывая, что  , то найти сумму векторов
, то найти сумму векторов  можно также по так называемым “правилом параллелограмма” (рис. 3)
можно также по так называемым “правилом параллелограмма” (рис. 3)

Вычитание векторов сводится к сложению противоположного вектора

Запишем основные свойства действий сложения векторов:

Заметим, что сумма нескольких векторов находится последовательным сложением двух из них, например:

Геометрически сумма нескольких векторов находится их последовательным отложением один за одним так, чтоб начало следующего совпадало с концом предыдущего. Суммой является вектор, который будет соединять начало первого с концом последнего (рис. 4). Если такая последовательность векторов даёт замкнутую ломаную то суммой векторов является  (рис. 5).
(рис. 5).

Умножение вектора на число
Произведением вектора  на число
на число  называют вектор
называют вектор  , для которого выполняются условия:
, для которого выполняются условия:
а)  ;
;
б)  , причём
, причём  сонаправленные если
сонаправленные если  противоположно направленные, если
противоположно направленные, если  . Отсюда, очевидно, что необходимым и достаточным условием коллинеарности векторов является соотношение
. Отсюда, очевидно, что необходимым и достаточным условием коллинеарности векторов является соотношение  .
.
Запишем основные свойства действий умножения вектора на число:

Скалярное произведение векторов
Скалярным произведением  или
или  векторов
векторов  и
и  называют выражение
называют выражение  , где
, где  угол, который образуют векторы. Отметим, что углом между векторами считают угол между их направлениями. Если хотя бы один из векторов равен
угол, который образуют векторы. Отметим, что углом между векторами считают угол между их направлениями. Если хотя бы один из векторов равен  , то их скалярное произведение считают равным нулю.
, то их скалярное произведение считают равным нулю.
Очевидно, что скалярное произведение двух ненулевых векторов будет равно нулю тогда и только тогда когда эти вектора перпендикулярны (ортогональны). Действительно, если  . Но
. Но  , следовательно,
, следовательно,

Наоборот, если  и согласно определениям
и согласно определениям
 .
.
Например, скалярное произведение  будет равным
будет равным

Запишем основные свойства действий скалярного умножения векторов:

Векторное произведение
Векторным произведением  двух векторов
двух векторов  и
и  называется вектор
называется вектор  , который удовлетворяет условия:
, который удовлетворяет условия:
1) модуль вектора  равен произведению модулей векторов и на синус угла между ними
равен произведению модулей векторов и на синус угла между ними

2) вектор перпендикулярный к плоскости, которая определяется векторами и (рис. 5).
3) вектор направленный так, что кратчайший поворот вектора к вектору видно с конца вектора таким, что происходит против движения стрелки (то есть вектора , и образуют правую упорядоченную тройку, или правый руль).

Модуль векторного произведения равен площади параллелограмма, построенного на векторах и . Векторное произведение выражается формулой  , где
, где  площадь параллелограмма построенного на векторах и ,
площадь параллелограмма построенного на векторах и ,  единичный вектор направления
единичный вектор направления  .
.
Приведём основные свойства векторного произведения:
1) векторное произведение равно нулю, если векторы и коллинеарные, или один из них нулевой;
2) от перестановки местами векторов-сомножителей векторное произведение меняет знак на противоположный:  (векторное произведение не имеет свойств перестановки);
(векторное произведение не имеет свойств перестановки);
3)  (распределительный закон);
(распределительный закон);
4)  (соединительный закон).
(соединительный закон).
Физическое содержание векторного произведения такое. Если  сила, а
сила, а  радиус-вектор точки её приложения, которая имеет начало в точке
радиус-вектор точки её приложения, которая имеет начало в точке  , то моментом силы
, то моментом силы  относительно точки
относительно точки  является вектор, который равен векторному произведению
является вектор, который равен векторному произведению  на , то есть
на , то есть  .
.
Смешенное произведение векторов
Смешенным произведением векторов  называют скалярное произведение вектора
называют скалярное произведение вектора  на вектор
на вектор  . Смешенное произведение обозначают (), поэтому по определению имеем
. Смешенное произведение обозначают (), поэтому по определению имеем

Как результат скалярного произведения векторов  и смешенное произведение является скалярной величиной (числом). Геометрически смешенное произведение — это объём параллелепипеда, построенного на эти векторах, взятый со знаком плюс, если векторы образуют правую тройку, и со знаком минус, когда эта тройка левая (рис. 7).
и смешенное произведение является скалярной величиной (числом). Геометрически смешенное произведение — это объём параллелепипеда, построенного на эти векторах, взятый со знаком плюс, если векторы образуют правую тройку, и со знаком минус, когда эта тройка левая (рис. 7).

Действительно,  , где
, где  угол между векторами
угол между векторами  угол между векторами
угол между векторами  и .
и .
Объём V параллелепипеда, построенного на векторах  равный произведению площади основы S на высоту h.
равный произведению площади основы S на высоту h.

Однако, знак смешенного произведения совпадает со знаком  , то есть он положительный, когда угол
, то есть он положительный, когда угол  острый ( образуют правую тройку векторов) и отрицательный, когда угол тупой ( образуют левую тройку векторов). Поэтому:
острый ( образуют правую тройку векторов) и отрицательный, когда угол тупой ( образуют левую тройку векторов). Поэтому:

Из геометрического содержания смешенного произведения выходит, что
1) смешанное произведение равно нулю тогда и только тогда, когда перемноженные вектора копланарные (условие компланарных векторов);
2) 
Учитывая коммутативность скалярного произведения и антикоммутативность векторного, для произвольных векторов имеем

Пример 1.
Доказать, что когда М — точка АВС и О — произвольные точки пространства, то выполняется равенство: 
Решение.
Пусть  медиана треугольника АВС. По свойствам медиан треугольника
медиана треугольника АВС. По свойствам медиан треугольника  Применив к векторам
Применив к векторам  и
и  формулу вычитания векторов
формулу вычитания векторов

тогда

Пример 2.
У прямоугольного параллелепипеда рёбра  , имеют длину 2, 3, 5. Вычислить длины отрезков
, имеют длину 2, 3, 5. Вычислить длины отрезков  и
и  и угол между прямыми и
и угол между прямыми и  .
.
Решение.
Пусть  единичные вектора направленные вдоль рёбер, которые рассматриваются. Тогда
единичные вектора направленные вдоль рёбер, которые рассматриваются. Тогда  (поскольку параллелепипед прямоугольный).
(поскольку параллелепипед прямоугольный).
рис. 9.
Далее,

Этим закончен “перевод” условия задачи на “язык” векторов.
Теперь произведём вычисления с векторами:

Наконец “переводим” полученные вектора равенства снова на “геометрический язык”. Поскольку  аналогично
аналогично  .
.
Далее поскольку  , где
, где  угол между данными векторами то
угол между данными векторами то  , отсюда получаем
, отсюда получаем  . Теперь с помощью тригонометрических таблиц находим значения угла
. Теперь с помощью тригонометрических таблиц находим значения угла  .
.
Разложение вектора по базису
Базисом на площади называют упорядоченную пару неколлинеарных векторов и точку отсчёта.
Теорема. Любой вектор  на плоскости можно разложить по двум неколлинеарным векторам
на плоскости можно разложить по двум неколлинеарным векторам  и
и  , то есть представить в виде:
, то есть представить в виде:  .
.
Доказательство.

Пусть векторы  компланарные и векторы и неколлинеарные. От точки О отложим все три вектора и на продолжении векторов и построим параллелограмм ONCM так, чтобы вектор
компланарные и векторы и неколлинеарные. От точки О отложим все три вектора и на продолжении векторов и построим параллелограмм ONCM так, чтобы вектор  был его диагональю.
был его диагональю.
Тогда по правилу параллелограмма  .
.
Но  , как коллинеарные векторы. Следовательно, вектор
, как коллинеарные векторы. Следовательно, вектор .
.
Числа, которые стоят при базисных векторах в разложении вектора за двумя неколлинеарными векторами называют координатами вектора в данном базисе и обозначают  .
.
Соответственно в пространстве базисом называется упорядоченная тройка некомпланарных векторов и точки отсчёта. Для четырёх некомпланарных векторов справедлива следующая теорема.
Теорема. Любой вектор  в пространстве можно разложить по трём некомпланарным векторам , и , то есть представить в виде:
в пространстве можно разложить по трём некомпланарным векторам , и , то есть представить в виде:  .
.
Доказательство.
От точки О отложим векторы  и на продолжении векторов построим параллелограмм
и на продолжении векторов построим параллелограмм 

в котором вектор  является диагональю. Как видим
является диагональю. Как видим

Числа х,у,z которые стоят при базисных векторах в разложении вектора по трём некомпланарным векторам называют координатами вектора в пространстве и обозначают  . Если базисные вектора взаимно перпендикулярны (их обозначают
. Если базисные вектора взаимно перпендикулярны (их обозначают  ), то вместе с точкой отсчёта они образуют декартовую систему координат, а координаты вектора в таком базисе называют декартовыми координатами. В декартовой системе координат разложение вектора будет иметь вид
), то вместе с точкой отсчёта они образуют декартовую систему координат, а координаты вектора в таком базисе называют декартовыми координатами. В декартовой системе координат разложение вектора будет иметь вид  . Если началом вектора
. Если началом вектора  является точка
является точка  , а концом — точка
, а концом — точка  , то координаты вектора
, то координаты вектора  вычисляют как разность соответствующих координат точек А и В,
вычисляют как разность соответствующих координат точек А и В,

Отсюда легко установить длину вектора как расстояние между двумя точками:

Действия над векторами, заданными своими координатами
1. При сложении двух, или более векторов их соответствующие координаты складываются:

Действительно:

2. При вычитании векторов соответствующие координаты вычитаются:

Доказательство аналогично предыдущему.
3. При умножении вектора на число все координаты умножаются на это число.
Правда, для вектора  и числа
и числа  имеем:
имеем:

4. Скалярное произведение двух векторов  равно сумме произведений соответствующих координат:
равно сумме произведений соответствующих координат:
Правда:

Поскольку  выполняется
выполняется  Следовательно, мы можем записать
Следовательно, мы можем записать

5. Векторное произведение векторов  заданных своими координатами вычисляется так:
заданных своими координатами вычисляется так:

6. Смешенное произведение трёх векторов  равняется:
равняется:

Пример 1.
Зная координаты векторов  , найти координаты векторов
, найти координаты векторов  .
.
Решение:

Ответ:  .
.
Пример 2.
Зная координаты векторов  вычислить координаты вектора
вычислить координаты вектора  .
.
Решение.

Ответ:  .
.
Пример 3.
Зная координаты векторов  вычислить:
вычислить:
а) скалярное произведение векторов 
б) векторное произведение векторов 
в) смешенное произведение векторов  .
.
Решение.

Ответ: 
На основании приведённых выше формул действий над векторами можно установить следующие условия и соотношения для нулевых векторов

1. Угол между векторами.

2. Условие перпендикулярности двух векторов:

(векторы перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю).
3. Условие коллинеарности двух векторов:  (векторы коллинеарные тогда и только тогда, когда соответствующие их координаты пропорциональны).
(векторы коллинеарные тогда и только тогда, когда соответствующие их координаты пропорциональны).
4. Условие компланарности трёх векторов.

(три вектора компланарны тогда и только тогда, когда их смешенное произведение равно нулю).
5. Деление отрезка АВ в заданном отношении.
Если точка  делит отрезок АВ в отношении
делит отрезок АВ в отношении  , то координаты точки М находят по формуле:
, то координаты точки М находят по формуле:

Если точка М делит отрезок АВ на пополам то  , и координаты точки находят согласно формуле:
, и координаты точки находят согласно формуле:

Действия над векторами (теория)
а) Произведение вектора на число.
Определение 1. Произведением вектора  на число λ называется вектор
на число λ называется вектор  ,
,
который имеет длину  и направление его совпадает с направлением вектора
и направление его совпадает с направлением вектора  если λ > 0, и противоположно ему, если λ < 0 (рис.12).
если λ > 0, и противоположно ему, если λ < 0 (рис.12).

Рис. 12.
Условие  (2.6)
(2.6)
является условием коллинеарности двух векторов.
б) Сложение векторов.
Определение 2. Суммой двух векторов  и
и  называется вектор
называется вектор  , начало которого совпадает с началом вектора , а конец совпадает с концом вектора , при условии, что начало вектора совпадает с концом вектора (правило треугольника) (рис.13).
, начало которого совпадает с началом вектора , а конец совпадает с концом вектора , при условии, что начало вектора совпадает с концом вектора (правило треугольника) (рис.13).

Рис. 13.
Понятно, что вектор  в этом случае является диагональю параллелограмма, построенного на векторах
в этом случае является диагональю параллелограмма, построенного на векторах  и
и  (правило параллелограмма) (рис.13).
(правило параллелограмма) (рис.13).
Для векторной суммы справедливый переместительный закон

Легко убедиться, что для векторной суммы имеет место соединительный
закон  .
.
Исходя из определения 2, легко находим сумму, например, четырех векторов  (рис. 14).
(рис. 14).

Рис. 14.
Вектор  соединяет начало первого вектора
соединяет начало первого вектора  с концом вектора
с концом вектора  (правило многоугольника).
(правило многоугольника).
в) Вычитание векторов.
Действие вычитание векторов можно рассматривать как обратное действие относительно сложения векторов.
Определение. Разностью  называется вектор
называется вектор  , который в сумме с вектором
, который в сумме с вектором  дает вектор
дает вектор  (рис. 15), т.е.
(рис. 15), т.е. 

Рис. 15.
Как видно из рис. 15, одна диагональ  является суммой
является суммой  , а вторая диагональ
, а вторая диагональ  является разностью векторов
является разностью векторов  и
и  .
.
Дадим еще одно определение разности векторов.
Определение. Разностью двух векторов и , которые имеют общее начало, называется вектор  , который соединяет концы этих векторов и направлен в сторону уменьшаемого.
, который соединяет концы этих векторов и направлен в сторону уменьшаемого.
Проекция вектора на ось
Пусть имеем произвольную ось l на плоскости и некоторый вектор  (рис. 16).
(рис. 16).

Рис. 16.
Опустим из начала A вектора и из конца B перпендикуляры на ось l. Основаниями перпендикуляров будут точки A1 и B1, которые называются проекциями точек A и B.
Величина A1B1 называется проекцией вектора  на ось l и обозначается
на ось l и обозначается  , то есть
, то есть  .
.
Определение 1. Проекцией вектора  на ось l называется величина отрезка A1B1, взята со знаком плюс, если направление отрезка A1B1 совпадает с направлением оси l, и с знаком минус, если направления противоположные.
на ось l называется величина отрезка A1B1, взята со знаком плюс, если направление отрезка A1B1 совпадает с направлением оси l, и с знаком минус, если направления противоположные.
Из точки A проведем прямую, параллельную оси l, которая пересечет отрезок BB1 в точке C. Вектор образует с осью l угол φ. Величина отрезка AC равна величине отрезка A1B1, а тогда из Δ ABC находим
 или
или  (2.7)
(2.7)
Определение 2. Проекция вектора на любую ось равна произведению длины этого вектора на косинус угла между осью и вектором.
Если угол φ острый, то проекция  — положительное число, а если угол φ тупой, то проекция
— положительное число, а если угол φ тупой, то проекция  — отрицательное число.
— отрицательное число.
Свойства проекций.
1. Если векторы и равны, то величины их проекций на одну и ту же ось l также равны, то есть:  .
.
2. Проекция суммы векторов на любую ось равна сумме проекций слагаемых на ту же ось, то есть:

3. Проекция разности двух векторов на ось l равна разности величин проекций на ту же ось, то есть:

4. Если вектор  умножен на любое число λ, то величина проекции вектора на ось l также умножится на число λ, то есть:
умножен на любое число λ, то величина проекции вектора на ось l также умножится на число λ, то есть:

Проекции вектора на оси координат
Рассматривается прямоугольная система координат Oxyz в пространстве и произвольный вектор  .
.
Пусть 

Проекции x, y, z вектора  на координатные оси называют координатами вектора и записывают
на координатные оси называют координатами вектора и записывают  .
.
Если заданы две точки A (x1; y1; z1) и B (x2; y2; z2), то координаты вектора находятся по формулам
x = x2 – x1, y = y2 – y1, z = z2 – z1 .

Рис. 17
Действительно, проведем через точки A и B плоскости, перпендикулярные оси Ox и обозначим точки их пересечения соответственно A1 и B1 (рис.17). Точки A1 и B1 имеют на оси Ox координаты x1 и x2 , но  на основе формулы (2.1), а потому
на основе формулы (2.1), а потому
x = x2 – x1 . Аналогично доказывается, что y = y2 – y1, z = z2 – z1 .
Направляющие косинусы вектора
Пусть имеем вектор  и будем считать, что он выходит из начала координат и не находится ни в одной координатной плоскости.
и будем считать, что он выходит из начала координат и не находится ни в одной координатной плоскости.

Рис. 18
Через точку M проведем плоскости, перпендикулярные к осям координат, и вместе с координатными плоскостями они образуют параллелепипед, диагональ которого — отрезок OM (рис.18). Через α, β, γ обозначим углы, которые образует вектор  с осями координат. Величины cos α, cos β, cos γ называются направляющими косинусами вектора
с осями координат. Величины cos α, cos β, cos γ называются направляющими косинусами вектора  . Координаты вектора
. Координаты вектора  .
.
Квадрат диагонали прямоугольного параллелепипеда равна сумме квадратов длин трех его измерений.
Поэтому
 или
или 
 (2.8)
(2.8)
Формула (2.8) выражает длину вектора через его координаты. Тогда на основе формул (2.7) и (2.8) получим

Отсюда для направляющих косинусов получаем
 (2.9)
(2.9)
Для направляющих косинусов справедливо равенство  (это вытекает из (2.9)).
(это вытекает из (2.9)).
Разложение вектора по ортам
Рассмотрим прямоугольную систему координат в пространстве и вектор, начало которого в точке O (рис.19) .

Рис. 19.
Обозначим орты осей координат Ox, Oy, Oz соответственно через  , причем
, причем

Спроецируем вектор  на координатные оси (через точку M проведем плоскости, перпендикулярные координатным осям). Проекциями точки M на координатные оси будут соответственно точки А, В, С (рис.19).
на координатные оси (через точку M проведем плоскости, перпендикулярные координатным осям). Проекциями точки M на координатные оси будут соответственно точки А, В, С (рис.19).
Из прямоугольника ODMC видно, что вектор  , но из прямоугольника AOBD получаем, что вектор
, но из прямоугольника AOBD получаем, что вектор  .
.
Тогда
 (2.10)
(2.10)
Вектор  , который соединяет точку O с точкой M (x, y, z) называется радиусом-вектором этой точки.
, который соединяет точку O с точкой M (x, y, z) называется радиусом-вектором этой точки.
Векторы  называются составными или компонентами вектора
называются составными или компонентами вектора  , а их величины OA = x, OB = y, OC = z координатами этого вектора. Компоненты вектора выразим через его координаты и единичные векторы
, а их величины OA = x, OB = y, OC = z координатами этого вектора. Компоненты вектора выразим через его координаты и единичные векторы  , а именно
, а именно  .
.
Подставляя эти значения в равенство (2.10), учитывая, что  , получим
, получим
 (2.11)
(2.11)
Слагаемые  являются составными или компонентами вектора
являются составными или компонентами вектора  .
.
Тройка векторов  называется координатным базисом, а разложение (2.11) называется разложением вектора по базису . Это основная формула векторной алгебры.
называется координатным базисом, а разложение (2.11) называется разложением вектора по базису . Это основная формула векторной алгебры.
Пример 1. Построить вектор  .
.

Рис. 20.
Решение. Компоненты вектора  являются
являются  и
и  , и им
, и им
соответствует прямоугольный параллелепипед, диагональ которого является искомый вектор (рис. 20).
Действия над векторами, заданными в координатной форме
Если векторы заданы в координатной форме, то действия сложения, вычитания, умножения вектора на число можно заменить простыми арифметическими операциями над координатами этих векторов по таким правилам.
Правило 1. При сложении векторов их одноименные координаты складываются
Пусть имеем векторы  и
и  . Найдем
. Найдем  . Запишем разложение векторов
. Запишем разложение векторов  и
и  . Тогда
. Тогда  .
.
Сложив эти равенства, получим
 .
.
Итак, координаты вектора  будут
будут 
Правило 2. Чтобы отнять от вектора  вектор
вектор  нужно вычесть из координат вектора
нужно вычесть из координат вектора  соответствующие координаты вектора
соответствующие координаты вектора  , то есть
, то есть

Правило 3. Чтобы умножить вектор  на число λ, нужно каждую из его координат умножить на это число. То есть, если
на число λ, нужно каждую из его координат умножить на это число. То есть, если
 то
то  .
.
Пример 1. Найти вектор  , если
, если 
Решение. Выполним действия последовательно и найдем

 .
.
Значит, 
Вектор – основные определения
Определение вектора в пространстве ничем не отличается от определения вектора на плоскости.
Определение 1. Вектором называется направленный отрезок, т.е. отрезок, для которого указано, какая из его граничных точек является началом, а какая — концом.
Так же как и на плоскости, векторы обозначаются  и т. п. и на чертеже изображаются стрелкой.
и т. п. и на чертеже изображаются стрелкой.
Определение 2. Длиной (или модулем) вектора  называется длина отрезка
называется длина отрезка  а направление, определяемое лучом
а направление, определяемое лучом  называется направлением вектора
называется направлением вектора 
Длина вектора  обозначается
обозначается  длина вектора
длина вектора  обозначается
обозначается 
Любая точка пространства также считается вектором, который называется нулевым. Начало такого вектора совпадает с его концом, а длина равна нулю. Обозначения нулевого вектора: 
По этой ссылке вы найдёте полный курс лекций по высшей математике:
Определение 3. Векторы  и
и  называются коллинеарными, если они лежат на одной прямой или на параллельных прямых.
называются коллинеарными, если они лежат на одной прямой или на параллельных прямых.
Если ненулевые векторы  и
и  лежат на параллельных прямых (следовательно, в одной плоскости), причём лучи
лежат на параллельных прямых (следовательно, в одной плоскости), причём лучи  лежат в одной полуплоскости, границей которой является прямая
лежат в одной полуплоскости, границей которой является прямая  то векторы
то векторы  и
и  называются сонаправленными в случае же, когда эти векторы принадлежат одной прямой, они называются сонаправленными, если один из лучей
называются сонаправленными в случае же, когда эти векторы принадлежат одной прямой, они называются сонаправленными, если один из лучей  или
или  целиком содержится в другом. Нулевой вектор будем считать сонаправленным с любым вектором в пространстве.
целиком содержится в другом. Нулевой вектор будем считать сонаправленным с любым вектором в пространстве.
Ясно, что сонаправленные векторы, в силу их определения, коллинеарны. Если два коллинеарных вектора не сонаправлены, то они называются противоположно направленными. Обозначения остаются обычными:  (векторы
(векторы  и
и  сонаправлены),
сонаправлены),  (векторы
(векторы  и
и  противоположно направлены).
противоположно направлены).
Определение 4. Векторы  и
и  называются равными, если
называются равными, если  и
и  (т.е. если векторы сонаправлены и их длины равны).
(т.е. если векторы сонаправлены и их длины равны).
Теорема 1. От любой тонки пространства можно отложить вектор, равный данному, и притом только один.
Доказательство этой теоремы аналогично доказательству соответствующей планиметрической теоремы.
Возможно вам будут полезны данные страницы:
Операции над векторами и их свойства
Операции над векторами в пространстве аналогичны соответствующим операциям на плоскости.
Пусть даны два вектора  и
и  В силу теоремы 1 от произвольной точки
В силу теоремы 1 от произвольной точки  пространства можно отложить вектор
пространства можно отложить вектор  а от точки
а от точки  — вектор
— вектор  Тогда вектор
Тогда вектор  называется по определению суммой векторов
называется по определению суммой векторов  и
и  а описанное правило построения суммы двух векторов — правилом треугольника (рис. 1).
а описанное правило построения суммы двух векторов — правилом треугольника (рис. 1).
Теорема 2. Сумма  векторов
векторов  и
и  не зависит от выбора точки
не зависит от выбора точки  от которой при сложении откладывается вектор
от которой при сложении откладывается вектор  (Докажите эту теорему самостоятельно.)
(Докажите эту теорему самостоятельно.)
Правило треугольника можно сформулировать и так: для любых трёх точек  пространства выполняется равенство
пространства выполняется равенство

Кроме того, сумму двух неколлинеарных векторов с общим началом можно построить и по правилу параллелограмма:  где
где  — вектор, модуль которого_равен длине диагонали параллелограмма, построенного на векторах
— вектор, модуль которого_равен длине диагонали параллелограмма, построенного на векторах  причём вектор
причём вектор  откладывают от той же точки, что и векторы
откладывают от той же точки, что и векторы  (рис. 2).
(рис. 2).
Все свойства операции сложения векторов, справедливые на плоскости, остаются справедливыми и в пространстве:
1) 
2)  — коммутативность (переместительный закон);
— коммутативность (переместительный закон);
3)  — ассоциативность (сочетательный закон).
— ассоциативность (сочетательный закон).
Здесь  — произвольные векторы в пространстве.
— произвольные векторы в пространстве.
Определение 5. Два ненулевых вектора называются противоположными, если их длины равны и эти векторы противоположно направлены.
Вектор, противоположный данному ненулевому вектору  обозначается
обозначается 
Определение 6. Разностью двух векторов  и
и  называется вектор
называется вектор  такой, что его сумма с вектором
такой, что его сумма с вектором  равна вектору
равна вектору 
Разность векторов  и обозначается
и обозначается  Таким образом, по определению
Таким образом, по определению  если
если 
Разность векторов и можно найти по формуле  (рис. 3) (докажите эту формулу самостоятельно).
(рис. 3) (докажите эту формулу самостоятельно).  Замечание. Так же как и на плоскости, для сложения нескольких векторов в пространстве можно использовать правило многоугольника (рис. 4), только в последнем случае этот многоугольник будет пространственным (т.е. не все векторы, его составляющие, лежат в одной плоскости).
Замечание. Так же как и на плоскости, для сложения нескольких векторов в пространстве можно использовать правило многоугольника (рис. 4), только в последнем случае этот многоугольник будет пространственным (т.е. не все векторы, его составляющие, лежат в одной плоскости).

Из законов сложения векторов следует, что сумма нескольких векторов не зависит от порядка слагаемых.
Умножение (произведение) вектора на число и его свойства, так же как и свойства операции сложения, не претерпевают изменений и в пространстве.
Определение 7. Произведением ненулевого вектора  на действительное число
на действительное число  называется вектор
называется вектор  длина которого равна произведению длины вектора
длина которого равна произведению длины вектора  на модуль числа
на модуль числа  причём вектор
причём вектор  сонаправлен с вектором
сонаправлен с вектором  при
при  и противоположно направлен вектору
и противоположно направлен вектору  при
при 
Таким образом, по определению,  если
если  причём
причём  при
при  Ясно, что векторы
Ясно, что векторы  коллинеарны. Если же
коллинеарны. Если же  или
или  то
то 
Свойства умножения вектора на число не отличаются от аналогичных свойств на плоскости:
-
 — ассоциативность (сочетательный закон);
— ассоциативность (сочетательный закон); -
 —дистрибутивность относительно сложения векторов (1-й распределительный закон);
—дистрибутивность относительно сложения векторов (1-й распределительный закон); -
 — дистрибутивность относительно сложения чисел (2-й распределительный закон).
— дистрибутивность относительно сложения чисел (2-й распределительный закон).
Здесь  и
и  — произвольные векторы,
— произвольные векторы,  — произвольные действительные числа.
— произвольные действительные числа.
Справедлива также и лемма о коллинеарных векторах: если векторы  и
и  коллинеарны и
коллинеарны и  то существует такое действительное число
то существует такое действительное число 
что  (ясно, что
(ясно, что  если
если 
Сформулируем и докажем ещё одну важную для решения некоторых задач теорему.
Теорема 3. Пусть  где
где  — некоторое действительное число, отличное от -1, тогда точки
— некоторое действительное число, отличное от -1, тогда точки 
 принадлежат одной прямой. Для произвольной точки
принадлежат одной прямой. Для произвольной точки  пространства справедливо равенство:
пространства справедливо равенство:

Доказательство
1. Из равенства  следует, что векторы
следует, что векторы  коллинеарны, и так как
коллинеарны, и так как  — общая точка прямых
— общая точка прямых  и
и  эти прямые совпадают, поэтому точки
эти прямые совпадают, поэтому точки  принадлежат одной прямой.
принадлежат одной прямой.
2. Пусть  — произвольная точка пространства. Тогда
— произвольная точка пространства. Тогда  и поскольку
и поскольку 
 откуда
откуда  Поделив обе части последнего равенства на
Поделив обе части последнего равенства на  приходим к формуле (1). Теорема доказана.
приходим к формуле (1). Теорема доказана.
З. Компланарные и некомпланарные векторы
Следующее понятие уже не имеет аналога в планиметрии.
Определение 8. Векторы называются компланарными, если лучи, задающие их направления, параллельны некоторой плоскости.
Замечание. Из определения 8 следует, что при откладывании от одной точки векторов, равных нескольким данным компланарным векторам, получим векторы, лежащие в одной плоскости. Таким образом, компланарные векторы лежат либо в одной плоскости, либо в параллельных плоскостях.
Очевидно, что любые два вектора компланарны и любые три вектора, два из которых коллинеарны, также являются компланарными (поясните). Рассмотрим теперь условия, при которых три вектора, из которых никакие два не коллинеарны, являются компланарными.
Теорема 4. Векторы  из которых никакие два не коллинеарны, являются компланарными в том и только том случае, если существуют такие действительные числа
из которых никакие два не коллинеарны, являются компланарными в том и только том случае, если существуют такие действительные числа  и
и  что
что
 (иными словами, векторы
(иными словами, векторы  являются компланарными в том и только том случае, если один из них можно выразить через два других, или, как говорят, разложить по двум другим).
являются компланарными в том и только том случае, если один из них можно выразить через два других, или, как говорят, разложить по двум другим).
Доказательство
1. Пусть векторы  компланарны. Докажем, что для них имеет место равенство (5). Отложим от произвольной
компланарны. Докажем, что для них имеет место равенство (5). Отложим от произвольной
точки  векторы
векторы 
 Векторы
Векторы  лежат в одной плоскости (см. замечание). Проведём через точку
лежат в одной плоскости (см. замечание). Проведём через точку  прямую
прямую  до пересечения с прямой
до пересечения с прямой  в точке
в точке  и прямую
и прямую  до пересечения с прямой
до пересечения с прямой  в точке
в точке  (см. рис. 8). Так как векторы
(см. рис. 8). Так как векторы  коллинеарны, по лемме о коллинеарных векторах (см. §1.2) существуют такие действительные числа
коллинеарны, по лемме о коллинеарных векторах (см. §1.2) существуют такие действительные числа  и
и  что
что 
 Но по правилу параллелограмма
Но по правилу параллелограмма  откуда
откуда  Обратно, пусть выполнено равенство (5).
Обратно, пусть выполнено равенство (5).
Докажем, что векторы  компланарны. Векторы
компланарны. Векторы  при откладывании от одной точки определяют некоторую плоскость. Согласно правилу параллелограмма и равенству (5) вектор
при откладывании от одной точки определяют некоторую плоскость. Согласно правилу параллелограмма и равенству (5) вектор  принадлежит той же плоскости, откуда следует, что векторы
принадлежит той же плоскости, откуда следует, что векторы 
 и
и  а значит, и векторы
а значит, и векторы  компланарны. Теорема доказана.
компланарны. Теорема доказана.
Отложим от произвольной точки  пространства векторы
пространства векторы 
 где
где  — три данных некомпланарных вектора, и рассмотрим параллелепипед
— три данных некомпланарных вектора, и рассмотрим параллелепипед  построенный на векторах
построенный на векторах  (рис. 9). Тогда сумму векторов
(рис. 9). Тогда сумму векторов  можно найти следующим образом:
можно найти следующим образом: 
 Это правило сложения трёх некомпланарных векторов называется правилом параллелепипеда.
Это правило сложения трёх некомпланарных векторов называется правилом параллелепипеда.
Если векторы  не являются компланарными и для вектора
не являются компланарными и для вектора  имеет место равенство
имеет место равенство  где
где  — некоторые действительные числа, то говорят, что вектор
— некоторые действительные числа, то говорят, что вектор  разложен по трём некомпланарным векторам
разложен по трём некомпланарным векторам
 а числа
а числа  называются коэффициентами разложения.
называются коэффициентами разложения.
Следующая теорема, называемая теоремой о разложении вектора по трём некомпланарным векторам, является основной во всей элементарной (школьной) векторной алгебре.
Теорема 5. Любой вектор  пространства можно разложить по трём данным некомпланарным векторам
пространства можно разложить по трём данным некомпланарным векторам  причём коэффициенты разложения определятся единственным образом. Доказательство. 1. Если векторы
причём коэффициенты разложения определятся единственным образом. Доказательство. 1. Если векторы  и
и  коллинеарны, то
коллинеарны, то 
 и теорема доказана.
и теорема доказана.
2. Пусть векторы  и
и  не коллинеарны. Отложим от произвольной точки
не коллинеарны. Отложим от произвольной точки  пространства векторы
пространства векторы 
 (рис. 10). Проведём через точку
(рис. 10). Проведём через точку  прямую
прямую  до пересечения с плоскостью
до пересечения с плоскостью  в точке
в точке  Через точку
Через точку  в плоскости
в плоскости  проведём прямую
проведём прямую  до пересечения с прямой
до пересечения с прямой  в точке
в точке  (в частности, если
(в частности, если  то точка
то точка  совпадает с точкой
совпадает с точкой  Согласно правилу многоугольника
Согласно правилу многоугольника  но векторы
но векторы 
 по построению коллинеарны, поэтому в силу леммы о коллинеарных векторах
по построению коллинеарны, поэтому в силу леммы о коллинеарных векторах 
 где
где  — некоторые действительные числа Таким образом, учитывая, что
— некоторые действительные числа Таким образом, учитывая, что  приходим к равенству
приходим к равенству 

3. Докажем теперь, что разложение вектора  по данным векторам
по данным векторам  единственно. Допустим, что это не так, т.е. существует ещё одно разложение
единственно. Допустим, что это не так, т.е. существует ещё одно разложение  в котором хотя бы один коэффициент не равен соответствующему коэффициенту в полученном нами разложении. Пусть, например,
в котором хотя бы один коэффициент не равен соответствующему коэффициенту в полученном нами разложении. Пусть, например,  Вычтем последнее равенство из предпоследнего.
Вычтем последнее равенство из предпоследнего.
Тогда
отсюда
– т. е. векторы
компланарны, что противоречит условию теоремы. Значит, наше допущение о ещё одном разложении неверно, т.е. разложение вектора
по данным векторам
единственно. Теорема доказана.

Итак, любой вектор  пространства можно разложить по трём данным некомпланарным векторам
пространства можно разложить по трём данным некомпланарным векторам  причём единственным образом. Заданную тройку некомпланарных векторов
причём единственным образом. Заданную тройку некомпланарных векторов  называют базисом, сами векторы
называют базисом, сами векторы  — базисными векторами, а разложение вектора
— базисными векторами, а разложение вектора  по векторам
по векторам  называют разложением по данному базису
называют разложением по данному базису 
Координаты вектора
Так же как и на плоскости, в пространстве помимо координат точки вводятся координаты вектора. Рассмотрим три попарно перпендикулярных вектора  отложенных от некоторой точки
отложенных от некоторой точки  пространства, таких, что
пространства, таких, что  (например, их можно направить по рёбрам единичного куба). Эти векторы, очевидно, не являются компланарными. Поэтому, в силу теоремы 5, любой вектор
(например, их можно направить по рёбрам единичного куба). Эти векторы, очевидно, не являются компланарными. Поэтому, в силу теоремы 5, любой вектор  можно разложить_по векторам
можно разложить_по векторам  причём единственным образом:
причём единственным образом:  Введём прямоугольную систему координат с началом в точке
Введём прямоугольную систему координат с началом в точке  так, чтобы направления осей
так, чтобы направления осей  совпали_с направлениями векторов
совпали_с направлениями векторов  соответственно. Тогда векторы
соответственно. Тогда векторы  называются единичными векторами осей координат, а числа
называются единичными векторами осей координат, а числа  — координатами вектора
— координатами вектора  в системе координат
в системе координат  (обозначения:
(обозначения: 
Свойства векторов пространства, заданных своими координатами, аналогичны соответствующим свойствам векторов на плоскости:
- Два вектора равны в том и только том случае, если равны их координаты.
- Координаты суммы (разности) двух векторов равны суммам (разностям) соответствующих координат этих векторов, т.е. для векторов
 получаем
получаем 
- При умножении вектора на число каждая его координата умножается на это число, т.е. для вектора
 и действительного числа
и действительного числа  получаем
получаем 
Докажем, например, свойство 2. Так как 
 то, согласно свойствам сложения векторов и умножения вектора на число,
то, согласно свойствам сложения векторов и умножения вектора на число,  т. е. вектор
т. е. вектор  имеет координаты
имеет координаты  что и требовалось доказать. Остальные свойства доказываются аналогично.
что и требовалось доказать. Остальные свойства доказываются аналогично.
Скалярное произведение векторов и его свойства
Определение скалярного произведения векторов  и
и  в пространстве ничем не отличается от аналогичного определения для векторов на плоскости.
в пространстве ничем не отличается от аналогичного определения для векторов на плоскости.
Определение 11. Скалярным произведением векторов  называется произведение длин этих векторов на косинус угла между ними (обозначение:
называется произведение длин этих векторов на косинус угла между ними (обозначение:  Таким образом, по определению,
Таким образом, по определению,

Теорема 8. Два ненулевых вектора  взаимно перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю, т. е.
взаимно перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю, т. е.

Доказательство этой теоремы вытекает из формулы (9).
Определение 12. Скалярным квадратом вектора  называется скалярное произведение
называется скалярное произведение  Скалярный квадрат обозначается
Скалярный квадрат обозначается  т.е. по определению
т.е. по определению 
Так как  то
то

Таким образом, длина вектора равна квадратному корню из его скалярного квадрата.
Замечание. Скалярное произведение есть число, поэтому грубой ошибкой явилась бы запись: 
Если векторы  и
и  заданы своими координатами:
заданы своими координатами: 
 то скалярное произведение может быть выражено через их координаты.
то скалярное произведение может быть выражено через их координаты.
Теорема 9. Скалярное произведение векторов равно сумме произведений их соответственных координат, т. е.

Доказательство. Отложим от произвольной точки  пространства векторы
пространства векторы  При этом, как мы знаем, соответствующие координаты векторов
При этом, как мы знаем, соответствующие координаты векторов  и
и  а также
а также  и
и  будут равны, а угол
будут равны, а угол  По теореме косинусов для треугольника
По теореме косинусов для треугольника  получим
получим

итак как  имеем
имеем 
 откуда
откуда  Но
Но

поэтому

Решение любой геометрической задачи на вычисление сводится, в сущности, к нахождению величин двух типов: расстояний и углов. Если в пространстве задан некоторый базис (в частности, прямоугольный), т. е. тройка некомпланарных векторов, то на основании теоремы 5 любой вектор пространства можно разложить по векторам этого базиса, причём единственным образом.
Если известны длины векторов, образующих базис, углы между ними и разложение некоторого вектора по векторам этого базиса, то, используя свойства скалярного произведения, можно определить длину такого вектора и угол, образуемый им с любым другим вектором, разложение которого по векторам этого базиса известно.
Таким образом, векторы позволяют находить решения довольно широкого класса геометрических задач, а умение определять разложение вектора по базисным векторам является важнейшим фактором их решения.
Для решения задач о разложении вектора по трём данным некомпланарным векторам, разумеется, необходимо, помимо теоремы 5, знание предшествующего ей материала.
Примеры с решением
Задача 1.
Основанием четырёхугольной пирамиды  является параллелограмм
является параллелограмм  Точки
Точки  и
и  — середины рёбер
— середины рёбер  и
и  соответственно. Найдите разложение векторов
соответственно. Найдите разложение векторов  по векторам
по векторам 
Решение (см. рис. 14).
1.  но
но  поэтому
поэтому 
2. Так как  — середина
— середина  но
но 
 (см. следствие 1 теоремы 3), поэтому
(см. следствие 1 теоремы 3), поэтому 

Ответ: 
Заметим, что в разложении вектора  по векторам
по векторам  коэффициент разложения при векторе
коэффициент разложения при векторе  равен нулю, а это означает, в силу теоремы 4, что векторы
равен нулю, а это означает, в силу теоремы 4, что векторы  компланарны. Если заранее «увидеть», что
компланарны. Если заранее «увидеть», что  где
где  — середина
— середина  (отсюда
(отсюда  то разложение вектора
то разложение вектора  можно было бы найти проще. Но векторный метод тем и хорош, что, даже не обладая развитым пространственным воображением, а лишь зная основные определения и теоремы, можно получить правильный ответ (пусть и не всегда самым оптимальным путём)!
можно было бы найти проще. Но векторный метод тем и хорош, что, даже не обладая развитым пространственным воображением, а лишь зная основные определения и теоремы, можно получить правильный ответ (пусть и не всегда самым оптимальным путём)!
Задача 2.
Пусть  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  — произвольная точка пространства. Найдите разложение вектора
— произвольная точка пространства. Найдите разложение вектора  по векторам
по векторам 
Решение (см. рис. 15). Пусть  — середина ребра
— середина ребра  Так как
Так как  — точка пересечения медиан треугольника
— точка пересечения медиан треугольника  точки
точки  принадлежат одной прямой, причём, в силу теоремы о точке пересечения медиан треугольника,
принадлежат одной прямой, причём, в силу теоремы о точке пересечения медиан треугольника,  Согласно следствию I теоремы 3
Согласно следствию I теоремы 3  Тогда
Тогда 

Ответ: 
Векторы и их решение
Вектором называется направленный отрезок. Направление отрезка показывается стрелкой. Различают начало и конец отрезка.
Два вектора называются равными между собой, если каждый из них можно получить параллельными перенесениями другого.
Равные векторы являются параллельными (колинеарными), имеют одно и то же направление и одинаковую длину. Длина вектора  называется абсолютной величиной или модулем вектора и обозначается
называется абсолютной величиной или модулем вектора и обозначается 
Вектор называется нулевым (ноль- вектором), если он имеет нулевую длину, то есть его конец сходится с началом.
Чтобы найти сумму двух векторов и  совместим начало вектора
совместим начало вектора  с концом вектора .
с концом вектора .
Суммой  векторов и называется вектор, начало которого сходится с началом вектора , а конец – с концом вектора (рис. 1.1).
векторов и называется вектор, начало которого сходится с началом вектора , а конец – с концом вектора (рис. 1.1).
 Правило треугольника
Правило треугольника
 Правило параллелограмма
Правило параллелограмма

Для складывания векторов имеют место такие законы:
1) переставной (коммутативный)

2) связующий

3) для каждого вектора существует противоположный  такой, что
такой, что

4)
5) для некоторых двух векторов и выполняются неравенства:

Если вектор образует угол  с осью
с осью  (рис. 1.2), то проекцию вектора на ость называется величина
(рис. 1.2), то проекцию вектора на ость называется величина

Пусть вектор имеет начало в точке  а конец – в точке
а конец – в точке  Тогда величины
Тогда величины 
 являются проекциями вектора на оси
являются проекциями вектора на оси  Проекции вектора однозначно определяют вектор. Потому имеет место равенство
Проекции вектора однозначно определяют вектор. Потому имеет место равенство

Если вектор  то проекция суммы векторов
то проекция суммы векторов

Произведением вектора на число  называется вектор
называется вектор  длина которого равна
длина которого равна  Умножение вектора на число имеет свойство ассоциативности и дистрибутивности, то есть для произвольных чисел
Умножение вектора на число имеет свойство ассоциативности и дистрибутивности, то есть для произвольных чисел  и векторов и
и векторов и  справедливы равенства:
справедливы равенства:

Любой вектор  можно записать в виде
можно записать в виде
где  – единичные векторы,
– единичные векторы, 
 называются компонентами вектора
называются компонентами вектора  (рис. 1.3) .
(рис. 1.3) .


Пример 1.73
Даны два вектора:  и
и 
Найти вектор 
Решение 
Признаком колинеарности двух векторов  и
и  является пропорциональность их координат:
является пропорциональность их координат:

Скалярным произведением двух векторов и называется число  которое равно произведению их модулей на косинус угла между ними:
которое равно произведению их модулей на косинус угла между ними:

Скалярное произведение можно записать в таком виде:

Если векторы и заданы своими координатами, то их скалярное произведение вычисляется по формуле:

Учитывая формулы (1.18) и (1.19), можно найти косинус угла между векторами и :

Отсюда получается условие перпендикулярности двух векторов: если  и
и  или в координатной форме:
или в координатной форме:

Среди свойств скалярного произведения отметим так:

Векторным произведением вектора  на вектор
на вектор  называется вектор
называется вектор  который имеет такие свойства:
который имеет такие свойства:
1) длина вектора  равна произведению длин сомножителей на синус угла между ними:
равна произведению длин сомножителей на синус угла между ними: 
2) вектор перпендикулярный к векторам и 
3) из конца вектора кратчайший поворот от  к
к  является таким, что происходит против часовой стрелки (рис. 1.4).
является таким, что происходит против часовой стрелки (рис. 1.4).

Заметим, что  а модуль векторного произведения равен плоскости параллелограмма, построенного на векторах и , если у них общее начало.
а модуль векторного произведения равен плоскости параллелограмма, построенного на векторах и , если у них общее начало.
В координатной форме векторное произведение векторов  и
и  можно записать в виде:
можно записать в виде:

Смешанным или скалярно – векторным произведением трех векторов  называется векторное произведение векторов и , скалярно умноженный на вектор
называется векторное произведение векторов и , скалярно умноженный на вектор  то есть
то есть 
Если векторы  – компланарны, то есть расположены в одной плоскости или на параллельных плоскостях, то их смешанное произведение равно нулю.
– компланарны, то есть расположены в одной плоскости или на параллельных плоскостях, то их смешанное произведение равно нулю.
Если известные координаты сомножителей 
 то смешанное произведение вычисляется по формуле:
то смешанное произведение вычисляется по формуле:

Если три ненулевых разложены в одной плоскости (компланарны), то из смешанное произведение 
Следует, в координатной форме условие компланарности трех ненулевых векторов имеет вид:

Решение примеров:
Пример 1.74
Заданы координатами точек 
 и
и  Найти:
Найти:
1) вектор  если
если 
2) угол между векторами  и
и 
3) координаты вектора 
4) объем пирамиды с вершинами в точках 
Решение
1) По формуле (1.14) находим

тогда 
2) Косинус угла между векторами  и
и  вычислим по формуле (1.20):
вычислим по формуле (1.20):

Поскольку косинус угла отрицательный, то угол  тупой.
тупой.
3) Координаты векторного произведения находим по формуле (1.22):


4) Чтобы найти объем пирамиды, найдем сначала смешанное произведение векторов, что выходят из одной вершины пирамиды:

Тогда объем пирамиды

Собственные числа и собственные векторы
Вектор – столбец  называется собственным вектором квадратной матрицы
называется собственным вектором квадратной матрицы 
 – ого порядка, что соответствует собственному значению
– ого порядка, что соответствует собственному значению  если он удовлетворяют матричному уравнению
если он удовлетворяют матричному уравнению  или
или 

Тут  – единичная матрица – ого порядка, а
– единичная матрица – ого порядка, а  – нулевой вектор – столбец. При условии, что
– нулевой вектор – столбец. При условии, что  получим характеристическое уравнение для определения собственных значений
получим характеристическое уравнение для определения собственных значений 

Координаты собственного вектора  что соответствуют собственному значению
что соответствуют собственному значению  является решением системы уравнений:
является решением системы уравнений:

Собственный вектор обозначаются с точностью к постоянному множителю.
Решение примеров:
Пример 1.90.
Обозначить собственные определения и собственные векторы матрицы

Решение. Характеристические уравнения данной матрицы имеет вид (1.24):
 или
или 
отсюда получается, что матрица  имеет два собственных значения
имеет два собственных значения  и
и  Собственный вектор
Собственный вектор  что соответствует
что соответствует  обозначаются с системой уравнений вида (1.25)
обозначаются с системой уравнений вида (1.25)
 или
или 
которое приводится к одному уравнению 
Возьмем  получим решение в виде
получим решение в виде 
Следует, первый собственный вектор является

Второй вектор  что соответствует собственному значению
что соответствует собственному значению  определяется из системы уравнений вида (1.25)
определяется из системы уравнений вида (1.25)

Эта система уравнений так же приводится к одному уравнению  положив
положив  запишем ее решение в виде
запишем ее решение в виде  Следует, второй собственный вектор:
Следует, второй собственный вектор:

Таким образом, матрица  имеет два разных определения
имеет два разных определения  и
и  и два собственных вектора, равных
и два собственных вектора, равных  и
и  (с точностью к постоянному множителю).
(с точностью к постоянному множителю).
Пример 1.91
Найти собственные векторы и собственные значения матрицы

Решение. Характеристическое уравнение

Раскрыв определитель получим:

Корень  – кратный, показатель кратности
– кратный, показатель кратности  корень
корень  – простой,
– простой, 
Система уравнений для определения собственных векторов имеет вид:

Последовательно подставим  и
и  в записанную систему:
в записанную систему:


Фундаментальная система уравнений получается, если свободным переменным  последовательно дать значения
последовательно дать значения 

Получили два линейно независимые собственные векторы. Вся совокупность векторов, что соответствуют собственному значению  имеет вид:
имеет вид:



Фундаментальная система решений получается, если взять 

Векторная алгебра
Понятие «вектор» (от лат. vector – носитель), как отрезка, имеет определенную длину и определенное направление, впервые появилось в работах по построению числовых систем в ирландского математика Уильяма Гамильтона (1805-1865). Это понятие связано с объектами, которые характеризуются величиной и направлением, например, скорость, сила, ускорение. При этом скорость можно понимать в широком смысле: скорость изменения издержек производства, доходов, спроса, потребления и предложения и др. Вектор может указывать направление наибольшего возрастания или убывания функции, описывающей различные экономические процессы. Векторы, рассмотренные в данном разделе, является частным случаем  -мерных векторов: они предполагают геометрическую интерпретацию, потому что принадлежат к векторным линейных пространств размерности
-мерных векторов: они предполагают геометрическую интерпретацию, потому что принадлежат к векторным линейных пространств размерности 
Для графического изображения решения экономических задач на плоскости и в пространстве применяются средства аналитической геометрии. Аналитическая геометрия – математическая наука, объектом изучения которой являются геометрические фигуры, а предметом – установление их свойств средствами алгебры с помощью координатного метода. Теоретической базой этой науки является частично известна из школы векторная алгебра.
Основателем метода координат и, вместе с тем, аналитической геометрии является Рене Декарт (1596-1650) – французский философ, математик, физик и физиолог. Его именем и названа известная «декартова прямоугольная система координат», которая позволяет определить положение фигуры на плоскости и тела в пространстве.
После изучения данной темы вы сможете:
● использовать инструмент векторной алгебры для геометрического изображения и анализа объектов экономических процессов;
● применять уравнение прямой линии на плоскости для геометрической интерпретации зависимости между функциональному признаку и аргументом, что на нее влияет;
● применять уравнение кривых второго порядка при построении нелинейных математических моделей экономических задач;
● осуществлять геометрическую интерпретацию решений экономических задач с помощью поверхностей и плоскостей.
Векторы: основные определения, линейные операции
Выберем на произвольной прямой (в  или в
или в  ) отрезок
) отрезок  и укажем, которую из точек
и укажем, которую из точек  или
или  считать начальной (началом отрезка), а какую – конечной (концом отрезка). Конец отрезка обозначают стрелке и говорят, что на отрезке задано направление. Отрезок
считать начальной (началом отрезка), а какую – конечной (концом отрезка). Конец отрезка обозначают стрелке и говорят, что на отрезке задано направление. Отрезок  с заданным на нем направлением, или коротко – направленный отрезок, называется вектором. Вектор обозначается символом
с заданным на нем направлением, или коротко – направленный отрезок, называется вектором. Вектор обозначается символом  или строчными буквами латинского
или строчными буквами латинского
алфавита с чертой:  и др. (Рис. 6.1).
и др. (Рис. 6.1).

Рис. 6.1
В применимых задачах естественных наук существенным является обстоятельство – где, в какой точке находится начало вектора. Например, результат действия силы зависит не только от ее величины и направления действия, но и от того, в какой точке она прикладывается.
Вектор, для которого фиксированная (не фиксирована) начальная точка называется связанным (свободным). Векторы, которые применяются в экономических задачах, как правило, не являются связанными, поэтому в дальнейшем будем рассматривать преимущественно свободные векторы
Длиной, или модулем, вектора называется длина соответствующего отрезка и обозначается одним из символов: 
Нулевым вектором 0, или ноль-вектором, называется вектор, длина которого равна нулю, а направление его считается произвольным (неопределенным).
Единичным вектором  называется вектор, длина которого равна единице.
называется вектор, длина которого равна единице.
Равными векторами называются векторы, которые принадлежат одной прямой или параллельным прямым, одинаково направлены и имеют равные длины.
Взаимно противоположными называются векторы, которые принадлежат одной прямой или параллельным прямым, имеют равные длины, но противоположно направлены. Вектор, противоположный вектору  , обозначают символом
, обозначают символом  .
.
Коллинеарными называют векторы, которые принадлежат одной прямой или параллельным прямым.
Компланарными называются векторы, которые принадлежат одной плоскости или параллельным плоскостям.
Линейные операции над векторами
Будем считать, что векторы  принадлежат одни плоскости. Осуществляя параллельный перенос одного из векторов
принадлежат одни плоскости. Осуществляя параллельный перенос одного из векторов  , совместим начало вектора
, совместим начало вектора  с концом вектора
с концом вектора  (или наоборот) и по отрезками, соответствующие векторам, как по двум сторонам, построим треугольник (рис. 6.2 а).
(или наоборот) и по отрезками, соответствующие векторам, как по двум сторонам, построим треугольник (рис. 6.2 а).
1. Суммой векторов  называется вектор
называется вектор  , который определяется третьей стороной треугольника, с началом в начале вектора
, который определяется третьей стороной треугольника, с началом в начале вектора  . Порядок построения суммы двух векторов по этому определению называют правилом треугольника.
. Порядок построения суммы двух векторов по этому определению называют правилом треугольника.
Параллельный перенос можно осуществить и так, что объединятся начала векторов  и
и  , тогда на векторах как на сторонах построим параллелограмм (рис. 6.2 б), и придем к известному из школьного курса алгебры правилу параллелограмма.
, тогда на векторах как на сторонах построим параллелограмм (рис. 6.2 б), и придем к известному из школьного курса алгебры правилу параллелограмма.

Рис. 6.2
Правило треугольника обобщается на произвольное конечное число векторов. Если параллельным переносом расположить векторы так, что конец предыдущего вектора (начиная с первого) является началом следующего, то результирующим будет вектор, соединяющий начало первого вектора слагаемого с концом последнего (рис. 6.3):


Рис. 6.3
Соответствующее правило называют правилом многоугольника.
Свойства суммы векторов:
1) переставная, или коммутативна:

2) соединительная, или ассоциативная:

3) 
4) 
Разницу  можно рассматривать как сумму вектора
можно рассматривать как сумму вектора  с вектором, противоположным вектору
с вектором, противоположным вектору 

Умножения вектора на скаляр
Пусть  – некоторое действительное число
– некоторое действительное число  . Произведением вектора
. Произведением вектора  со скаляром
со скаляром  называется вектор
называется вектор  , модуль которого равен произведению модулей
, модуль которого равен произведению модулей  , а направление
, а направление  совпадает с направлением
совпадает с направлением  , если
, если  , или противоположно направлению
, или противоположно направлению  , если
, если  (рис. 6.4):
(рис. 6.4):


Рис. 6.4
При вектор
вектор  превращается в ноль-вектор
превращается в ноль-вектор  .
.
Свойства умножения вектора на скаляр:
1) переставной или коммутативных закон:
 где
где 
2) соединительный, или ассоциативный закон:
 где
где 
3) распределительный или дистрибутивный закон:
 где
где 
4) 
5) 
Из определения умножения вектора на скаляр следует необходимое и достаточное условие коллинеарности двух векторов: вектора  и
и  коллинеарны тогда и только тогда, когда каждый из них является произведением другого из скаляром:
коллинеарны тогда и только тогда, когда каждый из них является произведением другого из скаляром:

Известно, что три ненулевые векторы  и
и  компланарны тогда и только тогда, когда один из них является линейной комбинацией двух других:
компланарны тогда и только тогда, когда один из них является линейной комбинацией двух других:
 компланарны
компланарны 
Рассмотрим понятие, имеет очень важное значение в теории векторов – проекции вектора на ось (прямую, имеет направление; заданное направление считать положительным, противоположное направление – отрицательным).
Компонентой вектора  относительно оси
относительно оси  называют вектор, начало которого является проекцией начала вектора
называют вектор, начало которого является проекцией начала вектора  на ось
на ось  , а конец – проекцией конца вектора на ось
, а конец – проекцией конца вектора на ось  (рис. 6.5).
(рис. 6.5).

Рис. 6.5
Проекцией вектора  на ось
на ось  называют скаляр, равный длине компоненты вектора
называют скаляр, равный длине компоненты вектора  относительно оси
относительно оси  со знаком
со знаком  , если направление компоненты совпадает с направлением оси
, если направление компоненты совпадает с направлением оси  , или со знаком
, или со знаком  , если ее направление противоположно направлению оси:
, если ее направление противоположно направлению оси:

Основные свойства проекции вектора на ось
1. Проекция вектора на ось  равна произведению длины вектора
равна произведению длины вектора  с косинусом угла между вектором и осью:
с косинусом угла между вектором и осью:

2. Проекция суммы двух векторов на эту ось равна сумме их проекций на эту ось:

Это свойство обобщается на любое конечное число векторов.
3. Проекция на ось произведения вектора со скаляром равна произведению со скаляром проекции самого вектора на ось:

Прямоугольная система координат в пространстве. Координатная и алгебраическая формы задания векторов
Пусть в трехмерном векторном пространстве  задана прямоугольная декартова система координат
задана прямоугольная декартова система координат  , что определяется тремя взаимно перпендикулярными числовыми осями – осями, на которых указано масштаб (единицу длины) – с общей точкой
, что определяется тремя взаимно перпендикулярными числовыми осями – осями, на которых указано масштаб (единицу длины) – с общей точкой  – началом координат (рис. 6.6).
– началом координат (рис. 6.6).

Рис. 6.6
Выберем в пространстве произвольную точку  и соединим ее отрезком прямой с началом координат
и соединим ее отрезком прямой с началом координат  . Вектор
. Вектор  , началом которого является начало координат , а концом данная точка , называется радиусом-вектором точки . Отметим, что радиусы-векторы точек пространства являются связанными векторами.
, началом которого является начало координат , а концом данная точка , называется радиусом-вектором точки . Отметим, что радиусы-векторы точек пространства являются связанными векторами.
Под декартовыми прямоугольными координатами точки  понимают проекции ее радиус-вектора
понимают проекции ее радиус-вектора  на оси
на оси 

Точка  с координатами
с координатами  обозначается через
обозначается через  . Вектор
. Вектор  каждой точки пространства (кроме точки
каждой точки пространства (кроме точки  ) определяет прямоугольный параллелепипед с диагональю, что является отрезком, на котором построено вектор
) определяет прямоугольный параллелепипед с диагональю, что является отрезком, на котором построено вектор  (рис. 6.6).
(рис. 6.6).
Измерениями параллелепипеда есть модули координат точки  . Длина диагонали параллелепипеда определяется по формуле:
. Длина диагонали параллелепипеда определяется по формуле:

Углы  , которые образованы радиусом-вектором
, которые образованы радиусом-вектором  с координатными осями
с координатными осями  называются его направляющими углами.
называются его направляющими углами.

откуда:

Косинусы направляющих углов называются направляющими косинусами радиус-вектора  . С (6.4) получаем свойства:
. С (6.4) получаем свойства:
1) направляющие косинусы являются координатами единичного радиус-вектора: 
2) сумма квадратов направляющих косинусов вектора  равна единице:
равна единице: 
Понятие «координата», «направляющие углы», «направляющие косинусы» без изменений переносятся на любые свободные векторы, потому начало каждого из них параллельным переносом можно поместить в начало  , дает радиус вектор определенной точки.
, дает радиус вектор определенной точки.
Координатами любого вектора  в пространстве называются его проекции на оси координат. Они обозначаются символами
в пространстве называются его проекции на оси координат. Они обозначаются символами  и пишут:
и пишут:  или
или  , где согласно определению координат:
, где согласно определению координат:

Задача вектора тройкой его координат  , называют координатной формой задачи.
, называют координатной формой задачи.
Для единичных векторов  , расположенных соответственно на осям
, расположенных соответственно на осям  , имеем:
, имеем:

Длина произвольного вектора  и его направляющие косинусы вычисляются по формулам:
и его направляющие косинусы вычисляются по формулам:

Найти длину и направляющие косинусы вектора 

По формулам (6.5) имеем:

Установим связь между координатами вектора – числами – и его компонентами – векторами – с помощью единичных векторов  (рис. 6.7).
(рис. 6.7).

Рис. 6.7
Компонентами вектора  относительно координатных осей являются векторы
относительно координатных осей являются векторы 
 (рис. 6.7). Согласно операции сложения векторов по правилу многоугольника получаем:
(рис. 6.7). Согласно операции сложения векторов по правилу многоугольника получаем:

Следовательно, любой вектор  в трехмерном пространстве является суммой трех его компонент относительно координатных осей:
в трехмерном пространстве является суммой трех его компонент относительно координатных осей:

Изображение вектора с  в виде суммы произведений координат с единичными векторами (ортами) называют алгебраической формой задания вектора.
в виде суммы произведений координат с единичными векторами (ортами) называют алгебраической формой задания вектора.
Согласно свойствами операций над векторами, алгебраическая форма задания дает возможность установить результаты действий над векторами, заданными в координатной форме.
1. При добавлении (вычитании) двух векторов с  :
:  и
и  , их соответствующие по номеру координаты прилагаются (вычитаются):
, их соответствующие по номеру координаты прилагаются (вычитаются):

Действительно, по свойствам ассоциативности и дистрибутивности имеем:

2. При умножении вектора  на скаляр
на скаляр  все его координаты умножаются на этот скаляр:
все его координаты умножаются на этот скаляр:

Действительно, согласно распределительным свойствам умножения скаляра на сумму векторов имеем:

Скалярное, векторное, смешанное произведения векторов
Скалярным произведением двух векторов  и
и  называется число (скаляр), равное произведению их модулей с косинус угла между ними
называется число (скаляр), равное произведению их модулей с косинус угла между ними  и обозначается
и обозначается  :
:

Вместо  часто пишут
часто пишут  или используют обозначения
или используют обозначения  . Название этой операции согласуется с ее сути, а именно: скалярное произведение является скаляром, то есть числом.
. Название этой операции согласуется с ее сути, а именно: скалярное произведение является скаляром, то есть числом.
Для определения угла  между векторами
между векторами  и
и  совмещают их начала и рассматривают угол между двумя лучами
совмещают их начала и рассматривают угол между двумя лучами  и
и  (рис. 6.8). Если угол
(рис. 6.8). Если угол  острый, то
острый, то  , если тупой, то
, если тупой, то  .
.
Основные свойства скалярного произведения векторов вытекают из его определения (6.7).
1. Скалярное произведение  ненулевых векторов равно нулю тогда и только тогда, когда векторы взаимно перпендикулярны (ортогональные):
ненулевых векторов равно нулю тогда и только тогда, когда векторы взаимно перпендикулярны (ортогональные):

2. Скалярный квадрат вектора равен квадрату его модуля, то есть

3. Скалярное произведение подчиняется всем законам арифметики чисел относительно линейных операций:


4. Скалярное произведение двух векторов равно произведению модуля одного из них с проекцией второго на ось, направление которого определяется первым вектором:

Доказательство этого свойства основывается на определении (6.3).
Скалярное произведение векторов  и
и  , заданных в координатной форме. Пусть имеем два вектора
, заданных в координатной форме. Пусть имеем два вектора 
1. Вычислим скалярные произведения единичных векторов  По свойству
По свойству  Для других пар на основании свойства 1 имеем:
Для других пар на основании свойства 1 имеем: 
2. Находим произведение  , подавая векторы в алгебраической форме (6.6) и используя распределительный закон:
, подавая векторы в алгебраической форме (6.6) и используя распределительный закон:

Раскрываем скобки и получаем:

Скалярное произведение двух векторов равно сумме произведений одноименных координат. Это полностью совпадает с определением скалярного произведения  -мерных векторов.
-мерных векторов.
Как следствие из (6.12) при  получаем формулу (6.5) модуля вектора через его координаты:
получаем формулу (6.5) модуля вектора через его координаты:

Определим угол между двумя ненулевыми векторами  и
и  , заданные в координатной форме. Воспользуемся определением скалярного произведения (6.7) и соотношения (6.5). В результате получаем:
, заданные в координатной форме. Воспользуемся определением скалярного произведения (6.7) и соотношения (6.5). В результате получаем:

Следовательно, косинус угла между двумя векторами определяется формулой:

Отсюда 
В результате с соотношением (6.13) получим критерий ортогональности двух векторов, заданных в координатной форме:

Критерием коллинеарности векторов  и
и  , заданных в координатной форме является пропорциональность их координат:
, заданных в координатной форме является пропорциональность их координат:

Векторное произведение двух векторов
Пусть  и
и  – векторы пространства
– векторы пространства 
 , определяющие некоторую плоскость
, определяющие некоторую плоскость  . Вектор
. Вектор  называется векторным произведением векторов и , если вектор удовлетворяет условиям:
называется векторным произведением векторов и , если вектор удовлетворяет условиям:
1) модуль его численно равен площади параллелограмма, построенного на векторах и как на сторонах;
2) он перпендикулярный плоскости параллелограмма и направленный так, что поворот вектора до совмещения с вектором кратчайшим путем наблюдается с конца вектора  против часовой стрелки (рис. 6.9).
против часовой стрелки (рис. 6.9).

Рис. 6.9
Векторное произведение обозначается символами:  , или
, или 
Следовательно,

где  наименьший из углов
наименьший из углов  что соответствует совмещению с поворотом вектора против часовой стрелки.
что соответствует совмещению с поворотом вектора против часовой стрелки.
Основные свойства векторного произведения вытекают из его определения.
1. Векторное произведение ненулевых векторов равно ноль-вектору тогда и только тогда, когда векторы и коллинеарны:

Еще одним критерием коллинеарности векторов является равенство нулевому вектору их векторного произведения.
2. Векторные произведения с разным порядком сомножителей являются взаимно противоположными векторами:

Это означает, что векторное произведение не подчиняется переставному (коммутативному) закону.
3. Векторное произведение подчиняется ассоциативному закону относительно скалярного множителя и дистрибутивному закону относительно сложения:

где 
Векторное произведение векторов  и
и  , заданных в координатной форме. Пусть имеем два ненулевые векторы:
, заданных в координатной форме. Пусть имеем два ненулевые векторы: 
1. Определяем векторные произведения ортов  (рис. 6.10).
(рис. 6.10).
Векторное произведение одноименных векторов по свойству 1 дает ноль вектор:

Однако все векторные произведения разноименных единичных векторов будут давать единичные векторы:


Рис. 6.10
Рассмотрим, например, произведение  . Совмещение
. Совмещение  с
с  кратчайшим путем (указано дугой со стрелкой на рис. 6.10) происходит против часовой стрелки, если смотреть с конца вектора
кратчайшим путем (указано дугой со стрелкой на рис. 6.10) происходит против часовой стрелки, если смотреть с конца вектора  , следовательно,
, следовательно,  . Тогда по свойству
. Тогда по свойству 
2. Находим произведение  , подавая векторы в алгебраической форме и используя арифметические свойства (6.18) и соотношения (6.19):
, подавая векторы в алгебраической форме и используя арифметические свойства (6.18) и соотношения (6.19):

Множители при  это вскрытые определители 2-го порядка, поэтому
это вскрытые определители 2-го порядка, поэтому 
Коэффициенты при единичных векторах в соотношении (6.20) являются координатами вектора  как векторного произведения векторов
как векторного произведения векторов  и
и  .
.
Если символы  в соотношении (6.20) считать элементами первой строки определителя 3-го порядка, то окончательно получим представление
в соотношении (6.20) считать элементами первой строки определителя 3-го порядка, то окончательно получим представление  в виде определителя:
в виде определителя:

Найдем векторное произведение векторов  и
и 

Модуль векторного произведения  определяет площадь параллелограмма, построенного на векторах
определяет площадь параллелограмма, построенного на векторах  и
и 
Смешанным произведением трех векторов  и
и  называется векторное произведение двух из них, умножен скалярно на третий вектор, то есть
называется векторное произведение двух из них, умножен скалярно на третий вектор, то есть  и т. д.
и т. д.
Смешанное произведение можно обозначать тройкой векторов  , в которой первые два элемента считают связанными векторным произведением, а результат векторного произведения умножают на третий вектор скалярно, то есть
, в которой первые два элемента считают связанными векторным произведением, а результат векторного произведения умножают на третий вектор скалярно, то есть  – это все равно, что
– это все равно, что  . Понятно, что результатом смешанного произведения является скаляр, поскольку векторное произведение
. Понятно, что результатом смешанного произведения является скаляр, поскольку векторное произведение  является вектором (обозначим его через
является вектором (обозначим его через  ), а произведение
), а произведение  дает скаляр.
дает скаляр.
Геометрическая интерпретация смешанного произведения. Пусть  и
и  – некомпланарные векторы. Построим на этих векторах как на ребрах параллелепипед (рис. 6.11).
– некомпланарные векторы. Построим на этих векторах как на ребрах параллелепипед (рис. 6.11).

Рис. 6.11
Вектор  по длине численно равна площади параллелограмма, построенного на векторах
по длине численно равна площади параллелограмма, построенного на векторах  и
и  как на сторонах. Этот параллелограмм является основой параллелепипеда, построенного на векторах
как на сторонах. Этот параллелограмм является основой параллелепипеда, построенного на векторах  и
и  . Вектор
. Вектор  является перпендикулярным плоскости параллелограмма.
является перпендикулярным плоскости параллелограмма.
Согласно (6.11) скалярное произведение  можно представить как произведение модуля
можно представить как произведение модуля  и проекции вектора
и проекции вектора  на ось, определяется вектором
на ось, определяется вектором  :
:

где  , причем
, причем  является положительным числом, если угол между векторами
является положительным числом, если угол между векторами  и
и  острый, и отрицательным, если этот угол тупой. По модулю эта проекция равна высоте параллелепипеда
острый, и отрицательным, если этот угол тупой. По модулю эта проекция равна высоте параллелепипеда  .
.
Модуль смешанного произведения трех векторов численно равен объему параллелепипеда  , построенного на векторах как на ребрах:
, построенного на векторах как на ребрах:

Основные свойства смешанного произведения вытекают из его определения и геометрической интерпретации.
1. Смешанное произведение ненулевых векторов равно нулю, если по крайней мере два из трех векторов коллинеарны или все три – компланарны, и наоборот.
Необходимым и достаточным условием компланарности трех ненулевых векторов является равенство нулю их смешанного произведения:
 компланарны
компланарны 
Свяжем с изображенными на плоскости векторами  круг (рис. 6.12). Перечисление векторов, начиная с любого, против часовой стрелки назовем положительным, или циклическим, перестановкой векторов, в противном случае – отрицательной перестановкой.
круг (рис. 6.12). Перечисление векторов, начиная с любого, против часовой стрелки назовем положительным, или циклическим, перестановкой векторов, в противном случае – отрицательной перестановкой.
2. Циклическая перестановка трех сомножителей смешанного произведения не меняет его величины, а отрицательное перестановки меняет его знак на противоположный:

Смешанное произведение векторов, заданных в координатной форме
Пусть имеем три ненулевые векторы  По определению смешанного произведения и представлением векторного и скалярного произведений в координатной форме имеем:
По определению смешанного произведения и представлением векторного и скалярного произведений в координатной форме имеем:

Полученная сумма произведений является расписанием определителя 3-го порядка, составленный из координат векторов, по элементам его третьей строки, то есть:

Векторы  компланарны тогда и только тогда, когда определитель 3-го порядка, элементами строк которого являются координаты этих векторов равен нулю (свойство 1):
компланарны тогда и только тогда, когда определитель 3-го порядка, элементами строк которого являются координаты этих векторов равен нулю (свойство 1):
 компланарны
компланарны 
С помощью смешанного произведения векторов легко определить, относятся ли четыре точки  одной плоскости. Для этого следует проверить выполнение условия компланарности трех векторов с общим началом в одной из точек.
одной плоскости. Для этого следует проверить выполнение условия компланарности трех векторов с общим началом в одной из точек.
Простейшие задачи аналитической геометрии
Задача об определении длины отрезка. Найти длину отрезка  , если известны координаты его концов:
, если известны координаты его концов:  . Эту задачу можно рассматривать как задачу о нахождении расстояния между двумя точками.
. Эту задачу можно рассматривать как задачу о нахождении расстояния между двумя точками.
1. Введем в рассмотрение вектор  с началом
с началом  и концом
и концом  и радиусы-векторы
и радиусы-векторы 
 (рис. 6.13).
(рис. 6.13).
2. Определим координаты вектора  как разности векторов
как разности векторов  и
и  :
: 
3. Находим модуль вектора  , который и равна длине отрезка
, который и равна длине отрезка  :
:

Задача об определении площади треугольника
Найдем площадь треугольника, заданного координатами вершин: 

По аксиомой стереометрии известно, что три точки в пространстве определяют плоскость и притом только одну. Для упрощения изложения, не нарушает общего подхода к решению задачи, договоримся рассматривать треугольник  , принадлежащей плоскости
, принадлежащей плоскости  :
:  и
и  .
.
1. Введем в рассмотрение векторы:

и найдем их векторное произведение 
По соотношению (6.20) имеем:

2. Вычислим модуль вектора  , численно равна площади параллелограмма
, численно равна площади параллелограмма  , построенного на векторах
, построенного на векторах  как на сторонах (рис. 6.14):
как на сторонах (рис. 6.14):

Тогда для площади треугольника  имеем:
имеем:

Знак  или
или  берется в зависимости от того, каким будет определитель – положительным или отрицательным.
берется в зависимости от того, каким будет определитель – положительным или отрицательным.
Если треугольник принадлежит не плоскости  , а любой другой плоскости в пространстве, то его площадь тоже можно найти по формуле:
, а любой другой плоскости в пространстве, то его площадь тоже можно найти по формуле:

Найдем площадь треугольника с вершинами 


Введем в рассмотрение векторы:  и
и 
 и определим их векторное произведение:
и определим их векторное произведение:

Тогда
 (кв. ед.)
(кв. ед.)
Задача о деление отрезка в заданном отношении
Пусть в пространстве заданы две точки  . Проведем через них произвольную прямую
. Проведем через них произвольную прямую  и установим на этой прямой положительное направление, согласно которому определим направление на отрезке
и установим на этой прямой положительное направление, согласно которому определим направление на отрезке  (рис. 6.15). На прямой
(рис. 6.15). На прямой  возьмем точку
возьмем точку  , которая может принадлежать отрезку
, которая может принадлежать отрезку  , или его продолжению. При этом, если точка
, или его продолжению. При этом, если точка  принадлежит отрезку
принадлежит отрезку  (рис. 6.15 а), говорится, что она осуществляет внутреннее деление отрезка на части, если не принадлежит (рис. 6.15 б) – то внешний.
(рис. 6.15 а), говорится, что она осуществляет внутреннее деление отрезка на части, если не принадлежит (рис. 6.15 б) – то внешний.

Рис. 6.15
Число  , которое определяется формулой
, которое определяется формулой

называется отношением, в котором точка  разделяет направленный отрезок
разделяет направленный отрезок  . Если
. Если  , то
, то  осуществляет внутреннее (внешнее) деление отрезка на части.
осуществляет внутреннее (внешнее) деление отрезка на части.
Задача о деление отрезка в заданном отношении формулируется так: найти координаты точки  , что разделяет отрезок
, что разделяет отрезок  в отношении
в отношении  , если отрезок задан координатами начала
, если отрезок задан координатами начала  и конца –
и конца – 
Пусть точкам  соответствуют радиусы-векторы
соответствуют радиусы-векторы  (рис. 6.16). Из определения (6.29) следует, что векторы
(рис. 6.16). Из определения (6.29) следует, что векторы  и
и  коллинеарны, то есть
коллинеарны, то есть  . Следовательно,
. Следовательно, 
С этого векторного равенства найдем вектор 

или в координатах:

Отсюда, если отрезок разделить на две равные части точкой  то координаты точки
то координаты точки  могут быть найдены следующим образом:
могут быть найдены следующим образом:

Можно доказать, что координаты точки пересечения медиан треугольника, заданного координатами его вершин  вычисляются по формулам:
вычисляются по формулам:



Лекции:
- Объем конуса
- Разложение на множители
- Деление многочлена на многочлен
- Правила дифференцирования
- Теорема Пифагора
- Асимптотическое поведение функций. Сравнение бесконечно малых функций
- Прямая линия на плоскости
- Выпуклость и вогнутость графика функции
- Матанализ для чайников
- Производные некоторых элементарных функций
Для
начала вспомним, какие действия над векторами вам известны.
Итак,
это сложение двух векторов по правилу треугольника или параллелограмма и
нескольких векторов по правилу многоугольника. Вектор разности векторов мы
получали как вектор суммы векторов .
Также
вам знакомо правило умножение вектора на число.
Сегодня
вы познакомитесь с ещё одним действием над векторами — скалярным умножением
векторов.
Определение.
Скалярным произведением двух векторов называется произведение их длин
на косинус угла между ними.
Скалярное
произведение векторов обозначают
так .
Или
возможна запись без знака умножения.
Оно
равно произведению длин данных векторов на косинус угла между ними.
Стоит
вспомнить, что угол между векторами получают, откладывая данные векторы от
одной точки. При этом выбирают угол меньший 180°
Обратите
внимание, ранее, при выполнении сложения, вычитания векторов и умножения
вектора на число, результатом каждого из этих действий мы получали некоторый
вектор.
Результатом
же скалярного произведения векторов является число.
Сейчас
подробнее рассмотрим случай, когда скалярное произведение векторов равно 0.
Понятно,
что для этого хотя бы один из множителей должен быть равен нулю.
Такими
будут случаи, когда хотя бы один из векторов в произведении является нулевым.
Если
же векторы ненулевые,
то косинус угла между ними должен быть равен 0.
Среди
возможных значений градусной меры угла между двумя векторами только лишь косинус
угла в 90° равен 0.
Отсюда
получаем, что векторы перпендикулярны.
Подытожим.
Скалярное произведение равно нулю, если хотя бы один из векторов сомножителей является
нулевым.
Ну,
а скалярное произведение ненулевых векторов равно нулю тогда и только
тогда, когда эти векторы перпендикулярны.
Из
формулы скалярного произведения также можно заметить, что, если векторы не
нулевые, то их длины всегда больше нуля, поэтому их произведение тоже
положительно. А вот значение косинуса угла между ними может принимать как
положительные, так и отрицательные значения.
Можно
сказать, что скалярное произведение двух ненулевых векторов больше нуля, если
угол между векторами острый. Равно нулю, если угол между ним прямой. И меньше
нуля, если угол между данными векторами тупой. Ещё раз обратим внимание на то,
что эти заключения верны для ненулевых векторов .
Задача.
Найти скалярное произведение векторов и
,
пользуясь данными рисунков.
Решение.
а)
б)
в)
г)
Мы
рассмотрели примеры применения формулы скалярного произведения двух векторов и
убедились, что скалярное произведение ненулевых векторов больше нуля, если угол
между ними является острым, равно нулю — если векторы перпендикулярны, и меньше
нуля — если угол между векторами тупой.
А
сейчас рассмотрим сонаправленные векторы и
.
Запишем формулу их скалярного произведения.
Вы
должны помнить с прошлых уроков, что угол между сонаправленными векторами равен
нулю. А косинус угла в 0° равен 1. Тогда получаем, что скалярное произведение
сонаправленных векторов равно произведению их длин.
Говоря
о противоположно направленных векторах, можно вспомнить, что угол между ними
равен 180°. Значит, косинус равен -1.
Тогда
скалярное произведение противоположно направленных векторов равно .
Что
касается, скалярного произведения вектора на самого себя, то его называют скалярным
квадратом вектора. Этот случай можно рассматривать в контексте
сонаправленных векторов. Действительно, ведь векторы равны, а значит, и
сонаправлены. Такое произведение равно произведению длин данного вектора.
Тогда
получаем, что скалярный квадрат вектора равен квадрату его длины.
Задача.
Найдём скалярные квадраты векторов ,
,
и
.
Решение.
Скалярное
произведение векторов применяется не только в математике. Например, из курса
механики известно, что работа постоянной силы F
при перемещении из точки М в точку Н равна .
Тем
самым получаем, что работа силы F
равна скалярному произведению вектора силы и
вектора перемещения .
Вернёмся
к скалярному произведению в математике и решим несколько задач.
Задача.
К одной и той же точке приложены и
,
действующие под углом в друг
к другу. ,
.
Найти величину равнодействующей силы .
Решение.
1
способ
,
2
способ
,
Ответ:
.
Задача.
В ,
где
,
проведена высота .
Вычислить ,
,
,
.
Решение
,
так как
Подведём
итоги нашего урока.
Сегодня
вы познакомились с новым действием над векторами — скалярным умножением
векторов.
Скалярным
произведением двух векторов называют произведение длин данных векторов на
косинус угла между ними.
Проанализировав
эту формулу, мы заметили, что скалярное произведение равно нулю, если хотя бы
один из векторов сомножителей является нулевым. Ну, а скалярное произведение
ненулевых векторов рано нулю, тогда и только тогда, когда данные векторы
перпендикулярны.
Также,
пользуясь знаниями об углах между сонаправленными и противоположно
направленными векторами, мы выяснили, что скалярное произведение сонаправленных
векторов равно произведению их длин, а скалярное произведение противоположно
направленных векторов противоположно произведению их длин.
Введя
понятия скалярного квадрата вектора, мы получили, что он равен квадрату длины
данного вектора.
Знания
о скалярном произведении векторов можно применять не только на уроках
математики. Так же они широко используются в физике.
Два вектора
a→
и
b→
всегда образуют угол.
Угол между векторами может принимать значения от
0°
до
180°
включительно.
Если векторы не параллельны, то их можно расположить на пересекающихся прямых.
Векторы могут образовать:
1. острый угол;

2. тупой угол;

3. прямой угол (векторы перпендикулярны).

Если векторы расположены на параллельных прямых, то они могут образовать:
4. угол величиной
0°
(векторы сонаправлены);

5. угол величиной
180°
(векторы противоположно направлены).

Если один из векторов или оба вектора нулевые, то угол между ними будет равен
0°
.
Угол между векторами записывают так:
Скалярное произведение векторов
Скалярным произведением двух векторов называется число, равное произведению длин этих векторов на косинус угла между ними:
a→⋅b→=a→⋅b→⋅cosa→b→ˆ
.
Результат скалярного произведения векторов является числом (в отличие от результата рассмотренных ранее действий с векторами — сложения, вычитания и умножения на число. В таких случаях результатом был вектор). При умножении вектора на вектор получается число, так как длины векторов — это числа, косинус угла — число — соответственно, их произведение также будет являться числом.
1. Если угол между векторами острый, то скалярное произведение будет положительным числом (так как косинус острого угла — положительное число).
Если векторы сонаправлены, то угол между ними будет равен
0°
, а косинус равен (1), скалярное произведение также будет положительным.
2. Если угол между векторами тупой, то скалярное произведение будет отрицательным (так как косинус тупого угла — отрицательное число).
Если векторы направлены противоположно, то угол между ними будет равен
180°
. Скалярное произведение также отрицательно, так как косинус этого угла равен (-1).
Справедливы и обратные утверждения:
1. Если скалярное произведение векторов — положительное число, то угол между данными векторами острый.
2. Если скалярное произведение векторов — отрицательное число, то угол между данными векторами тупой.
Особенный третий случай!
Обрати внимание!
3. Если угол между векторами прямой, то скалярное произведение векторов равно нулю, так как косинус прямого угла равен (0).
Обратное суждение: если скалярное произведение векторов равно нулю, то эти векторы перпендикулярны.
Вектор, умноженный на самого себя, будет числом, которое называется скалярным квадратом вектора. Скалярный квадрат вектора равен квадрату длины данного вектора и обозначается как
a→2
.
Свойства скалярного произведения
Для любых векторов и любого числа справедливы следующие свойства:
1.
a→2≥0
, к тому же
a→2>0
, если
a→≠0→
.
2. Переместительный, или коммутативный, закон скалярного произведения:
a→⋅b→=b→⋅a→
.
3. Распределительный, или дистрибутивный, закон скалярного произведения:
a→+b→⋅c→=a→⋅c→+b→⋅c→
.
4. Сочетательный, или ассоциативный, закон скалярного произведения:
k⋅a→⋅b→=k⋅a→⋅b→
.
Использование скалярного произведения
Удобно использовать скалярное произведение векторов для определения углов между прямыми и между прямой и плоскостью.
Угол между прямыми
Ознакомимся с ещё одним определением.
Вектор называют направляющим вектором прямой, если он находится на прямой или параллелен этой прямой.

Чтобы определить косинус угла между прямыми, надо определить косинус угла между направляющими векторами этих прямых, то есть найти векторы, параллельные прямым, и определить косинус угла между векторами.
Для этого необходимо рассмотреть определение скалярного произведения, если векторы даны в координатной системе.
Если
a→x1;y1;z1
,
b→x2;y2;z2
, то
a→⋅b→=x1⋅x2+y1⋅y2+z1⋅z2
.
Прежде была рассмотрена формула определения длины вектора в координатной форме.
Теперь, объединив эти формулы, получим формулу для определения косинуса угла между векторами в координатной форме. Так как из формулы скалярного произведения следует, что
cosα=a→⋅b→a→⋅b→
, то
.
Угол между прямой и плоскостью
Введём понятие о нормальном векторе плоскости.
Нормальный вектор плоскости — это любой ненулевой вектор, лежащий на прямой, перпендикулярной к данной плоскости.

Используя следующий рисунок, легко доказать, что косинус угла
β
между нормальным вектором
n→
данной плоскости и неким вектором
b→
равен синусу угла
α
между прямой и плоскостью, так как
α
и
β
вместе образуют угол в
90°
.

При нахождении косинуса угла между
n→
и
b→
можно использовать это число как синус угла между прямой, на которой лежит вектор
b→
, и плоскостью.
