Нужно добиться следующего результат, как показано на рисунке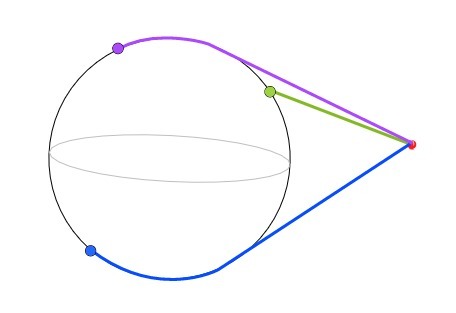
Известны координаты красной точки и координаты (широта/долгота) на сфере (из можно конвертировать в мировые (3D)
Если провести прямую до нужной точки, то в случае ее нахождения по ту сторону сферы прямая будет пересекать сферу. Конечно, можно было бы перевести первую точку пересечения в координаты сферы и уже по широте/долготе найти расстояние и прибавить его к расстоянию к первой точке, но так расстояние будет преувеличеным, если точка находится ровно с обратной стороны.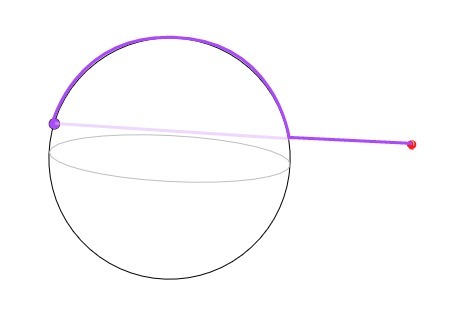
UPD: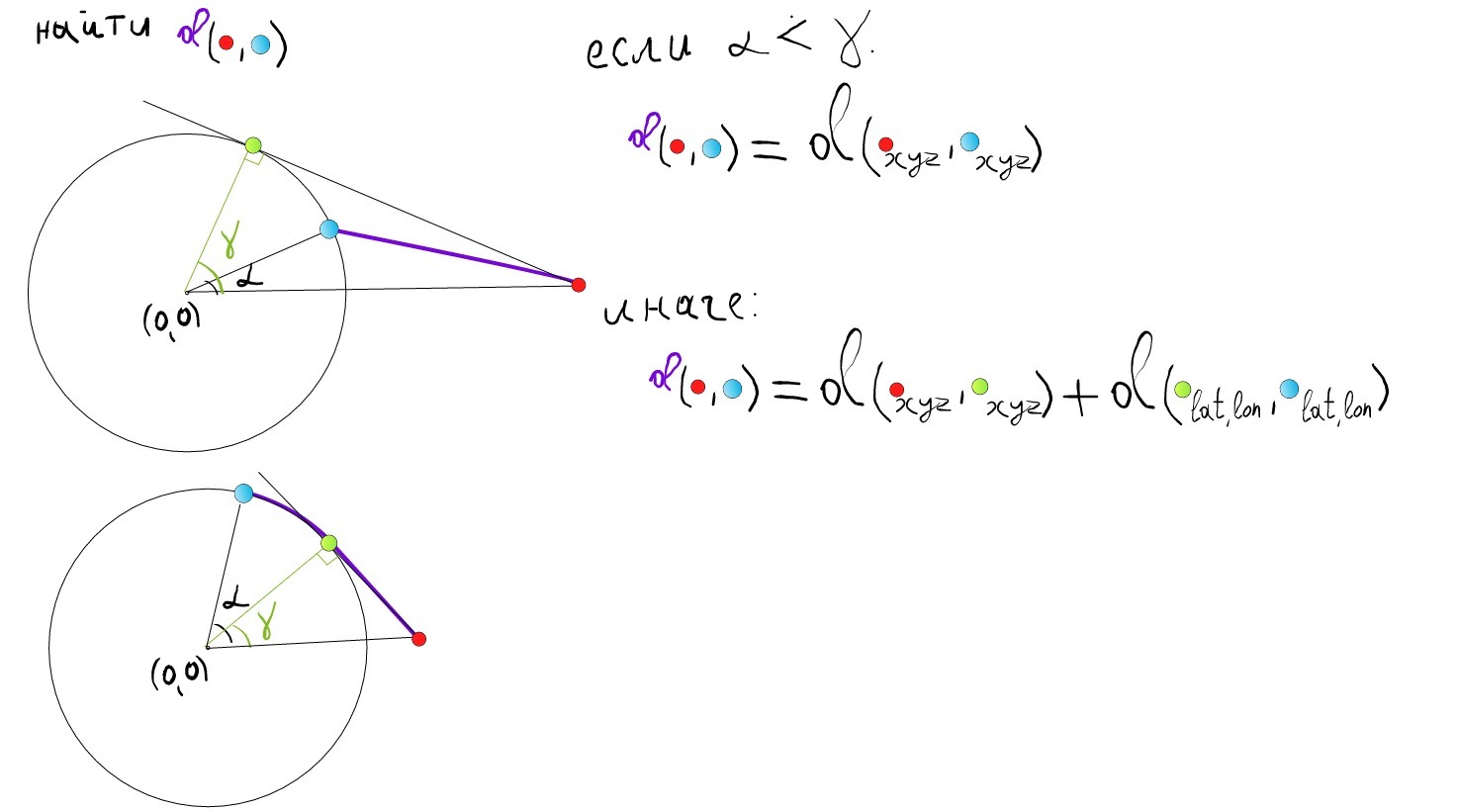
осталось разобраться как найти точку касательной к сфере
Как найти расстояние от точки до сферы (начертательная геометрия)
ADMIRAL*****
Ученик
(166),
закрыт
6 лет назад
Лучший ответ
NiCr
Просветленный
(29688)
11 лет назад
Расстояние от точки А поверхности измеряют по нормали до точки пересечения нормали с поверхностью. 
Остальные ответы
Валерий Янович
Оракул
(89997)
11 лет назад
Соединить точку с центром сферы прямой2 линией. Отрезок этой линии от точки до поверхности сферы и будет искомым расстоянием.
Похожие вопросы
Знания.нет
Войти
Зарегистрироваться
Войти
Зарегистрироваться
-
Все предметы
-
Математика
-
Литература
-
Алгебра
-
Русский язык
-
Геометрия
-
Английский язык
-
Химия
-
Физика
-
Биология
-
Другие предметы
-
История
-
Обществознание
-
Окружающий мир
-
География
-
Українська мова
-
Информатика
-
Українська література
-
Қазақ тiлi
-
Экономика
-
Музыка
-
Право
-
Беларуская мова
-
Французский язык
-
Немецкий язык
-
МХК
-
ОБЖ
-
Психология
-
Оʻzbek tili
-
Кыргыз тили
-
Астрономия
-
Физкультура и спорт
-
Алгебра
Предыдущий вопрос
Следующий вопрос
gilevkir
4 года назад
Ответ
Ответ дан
армения20171
AM=BM
OM расстояние ответ центра сфери.
до прямой AB;OM_|_AB
AB²=(7-1)²+(2-2)²+(5+3)²=36+64=100
AB=10
AM=10/2=5
∆OMA =>OM²=13²-5²=169-25=144
OM=12
Ответы и объяснения
- gilevkir
Не тот ответ, который тебе нужен?
Найди нужный
По всем вопросам пишите на – [email protected]
Вот мое собственное решение, основанное на идее в спроси доктора Матема. Буду рад услышать ваш отзыв.
Отказ от ответственности в первую очередь. Это решение подходит для сфер. Земля не является сферой, и система координат (WGS 84) не предполагает, что это сфера. Так что это всего лишь приближение, и я не могу точно оценить ошибку. Кроме того, для очень малых расстояний, вероятно, также можно получить хорошее приближение, если предположить, что все является просто компланарностью. Опять же, я не знаю, насколько «маленькими» должны быть расстояния.
Теперь к делу. Я назову концы линий A, B и третью точку C. По сути, алгоритм заключается в следующем:
- сначала преобразовать координаты в декартовы координаты (с началом в центре Земли) – например здесь.
-
Вычислите T, точку на прямой AB, ближайшую к C, используя следующие 3 векторных произведения:
G = А х В
Ф = С х Г
Т = G x F
-
Нормализовать T и умножить на радиус Земли.
- Преобразуйте T обратно в долготу широту.
- Рассчитайте расстояние между T и C – например здесь.
Этих шагов достаточно, если вы ищете расстояние между C и большим кругом, определяемым A и B.Если, как и меня, вас интересует расстояние между C и более коротким отрезком линии, вам нужно сделать дополнительный шаг, чтобы проверить, что T действительно находится на этом участке. Если это не так, то ближайшей точкой обязательно будет один из концов A или B – проще всего проверить, какой из них.
В общем, идея трех векторных произведений заключается в следующем. Первый (G) дает нам плоскость большого круга A и B (то есть плоскость, содержащую A, B и начало координат). Вторая (F) дает нам большую окружность, проходящую через C и перпендикулярную G. Тогда T – это пересечение больших окружностей, определяемых F и G, полученное до правильной длины путем нормализации и умножения на R.
Вот часть кода Java для этого.
Нахождение ближайшей точки на большом круге. Входы и выходы представляют собой массивы длиной 2. Промежуточные массивы имеют длину 3.
double[] nearestPointGreatCircle(double[] a, double[] b, double c[])
{
double[] a_ = toCartsian(a);
double[] b_ = toCartsian(b);
double[] c_ = toCartsian(c);
double[] G = vectorProduct(a_, b_);
double[] F = vectorProduct(c_, G);
double[] t = vectorProduct(G, F);
normalize(t);
multiplyByScalar(t, R_EARTH);
return fromCartsian(t);
}
Поиск ближайшей точки на отрезке:
double[] nearestPointSegment (double[] a, double[] b, double[] c)
{
double[] t= nearestPointGreatCircle(a,b,c);
if (onSegment(a,b,t))
return t;
return (distance(a,c) < distance(b,c)) ? a : c;
}
Это простой метод проверки, находится ли точка T, которая, как мы знаем, находится на том же большом круге, что и A и B, на более коротком сегменте этого большого круга. Однако есть более эффективные методы для этого:
boolean onSegment (double[] a, double[] b, double[] t)
{
// should be return distance(a,t)+distance(b,t)==distance(a,b),
// but due to rounding errors, we use:
return Math.abs(distance(a,b)-distance(a,t)-distance(b,t)) < PRECISION;
}
![]()
8.3. ПЕРЕСЕЧЕНИЕ ПРЯМОЙ
СПОВЕРХНОСТЬЮ ВРАЩЕНИЯ
Точками пересечения прямой с поверхностью вращения являются точки пересечения этой прямой с контуром сечения поверхности вспомогательной плоскостью, проведенной через эту прямую (рис. 8.14).
а)
б)
Рис. 8.14. Пересечение прямой линии с поверхностью: а) модель; б) эпюр
В общем случае, алгоритм решения задачи построения точек пересечения прямой с поверхностью вращения состоит в следующем:
1. Провести плоскость частного положения α через прямую l. Вспомогательная секущая плоскость должна пересекать поверхность по линии, проекции которой можно легко построить – по окружности или прямой.
159

2.Построить линию сечения поверхности плоскостью α.
3.Определить точки пересечения прямой l с линией сечения – точки А и В.
4.Обвести чертеж прямой с учетом видимости точек пересечения. Видимую линию обводят толстой основной линией, невидимую – тонкой штриховой, а внутри между точками входа и выхода – сплошной тонкой линией (считается, что линия отсутствует).
Построение значительно упрощается, если:
– прямая является проецирующей (рис. 8.15, а). Вырожденная проекция прямой (точка) обладает собирательным свойством. Поэтому вырожденная проекция прямой совпадает с проекциями точек пересечения прямой с поверхностью вращения. Другие проекции точек пересечения определяются при помощи построения параллелей. На примере, вырож-
денная проекция прямой l3 совпадает с А3 и В3. На плоскости П1 проекции А1 и В1 строятся при помощи параллели (окружности), на П2 – по линии связи;
– поверхностью вращения является цилиндр (рис. 8.15, б). Вырожденная проекция цилиндра (окружность) обладает собирательным свойством. Поэтому проекции точек пересечения прямой с поверхностью лежат на вырожденной проекции цилиндра. Другие проекции точек пересечения определяются по линии связи. На примере, вырожденная про-
екция цилиндра находится на П3. Пересечение прямой и вырожденной проекции определяют проекции А3 и В3. На плоскости П2 и П1 проекции точек А и В строятся по линии связи.
а) б)
Рис. 8.15. Пересечение: а) проецирующей прямой с тором; б) прямой с цилиндром
160

Задача 1.
Построить пересечение прямой l с поверхностью сферы: Дано: Решение:
161

Задача 2.
Построить пересечение прямой l с поверхностью конуса: Дано: Решение:
162

Дано:
Дано:
Задача 3.
Построить пересечение прямой l с поверхностью тора:
Решение:
Решение:
164

Дано:
Дано:
Задача 4.
Построить пересечение прямой l с поверхностью цилиндра:
Решение:
Решение:
165

8.4. ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ОТ ТОЧКИ ДО ПОВЕРХНОСТИ
Расстоянием от точки A до поверхности вращения является расстояние от точки A до образующей поверхности вращения, которая лежит в плоскости , заданной данной точкой A и осью i поверхности вращения.
Для определения натуральной величины расстояния от точки A до поверхности вращения необходимо выполнить следующие преобразова-
ния (рис.8.16):
1.Вращением точки A вокруг оси i вывести точку A в плоскость ‘, параллельную плоскости проекций (на одной плоскости проекций проекция точки A движется по окружности, а на другой плоскости проекций проекция точки A перемещается по линии, параллельной смежной плоскости проекций).
2.После такого преобразования, из точки A’ опустить перпендикуляр к контурной образующей поверхности вращения до пересечения в точке В’. Отрезок перпендикуляра A’В’ – натуральная величина расстояния от точки до поверхности вращения.
3.Чтобы найти точку В, необходимо выполнить обратное преобра-
зование – вращение плоскости ‘ со всеми точками в исходное положение.
Рис. 8.16. Определение расстояния от точка до поверхности вращения
Рассмотрим решение задач по изучаемой теме.
166

Задача 1.
Определить расстояние от точки А до поверхности сферы: Дано: Решение:
Задача 2.
Определить расстояние от точки А до поверхности цилиндра: Дано: Решение:
167

Задача 3.
Определить расстояние от точки А до поверхности конуса: Дано: Решение:
Задача 4.
Определить расстояние от точки А до поверхности тора: Дано: Решение:
168
