Матрица линейного оператора примеры
Построение матрицы по заданной формуле отображения.
Пусть отображение задано с помощью формулы:

то есть для координат произвольного исходного вектора определены координаты его образа. Тогда, рассматривая вместо произвольного вектора x вектор  , найдём его образ, это будет вектор
, найдём его образ, это будет вектор  . Для этого в формуле, задающей образ вектора, полагаем
. Для этого в формуле, задающей образ вектора, полагаем  ,
,  ,…,
,…,  . Аналогично находим образы для
. Аналогично находим образы для  ,…,
,…,  . Из координат образа вектора
. Из координат образа вектора  составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
Пример 1. Пусть оператор задан с помощью формулы:
 .
.
Прежде всего, докажем, что это отображение – действительно линейный оператор.
Отобразим сумму векторов:
 Теперь каждую координату получившегося вектора можем преобразовать:
Теперь каждую координату получившегося вектора можем преобразовать:



 .
.
Аналогично для умножения на константу:


Для того чтобы найти матрицу этого линейного оператора, нужно, как было сказано выше, подставить значения x1 = 1, x2 = 0, а затем x1 = 0, x2 = 1. В этом примере образы базисных векторов – соответственно (3, 1) и (2, -1).
Поэтому матрица линейного оператора будет иметь вид:
 .
.
Аналогичным способом решается задача и для 3 и большего количества переменных.
Пример 2.  .
.
Построим матрицу оператора. Отображая вектор (1,0,0), получаем (1,4,-1), соответственно (0,1,0) переходит в (2,1,-2), а вектор (0,0,1) – в (-1,1,3).
Матрица линейного оператора:
 .
.
2.2. Построение матрицы оператора в случае, когда известен исходный базис и система векторов, в которую он отображается.
Если задана система  из n векторов, образующих базис, и какая-нибудь произвольная система n векторов
из n векторов, образующих базис, и какая-нибудь произвольная система n векторов  (возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
(возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
Матрицу этого оператора можно найти двумя способами: с помощью обратной матрицы и с помощью системы уравнений.
Пусть  – матрица оператора в базисе
– матрица оператора в базисе  . По условию,
. По условию,  для всех индексов
для всех индексов  . Данные n равенств можно записать в виде одного матричного равенства:
. Данные n равенств можно записать в виде одного матричного равенства:  , при этом столбцы матрицы
, при этом столбцы матрицы  – это векторы , а столбцы матрицы
– это векторы , а столбцы матрицы  – векторы . Тогда матрица может быть найдена в виде
– векторы . Тогда матрица может быть найдена в виде  .
.
Пример. Найти матрицу линейного оператора, отображающего базис
 в систему векторов
в систему векторов  .
.
Здесь  ,
,  ,
,  , и получаем:
, и получаем:
 .
.
Проверка осуществляется умножением получившейся матрицы на каждый вектор:  .
.
Аналогично решаются подобные задачи и для трёхмерного пространства. В приложении (§5) есть несколько вариантов таких задач.
2.3. Прочие способы нахождения матрицы оператора.
Существуют также примеры, где линейный оператор задаётся другими способами, отличными от рассмотренных в п. 2.1 и 2.2.
Пример. Линейными операторами являются как правое, так и левое векторное умножение на фиксированный вектор в трёхмерном пространстве, то есть отображения вида  и
и  . Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
. Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
 .
.
Аналогично,  ,
,
 .
.
Координаты полученных векторов запишем в виде столбцов матрицы оператора.
Матрица оператора:  .
.
Аналогично можно построить матрицу линейного оператора :
 .
.
Пример. Линейный оператор дифференцирования в пространстве всех многочленов степени не более n. Это пространство размерности n + 1. Возьмём в качестве базиса элементы  ,
,  ,
,  ,…,
,…,  .
.
 ,
,  ,
,  , аналогично получим
, аналогично получим  ,…,
,…,  .
.
Матрица этого линейного оператора:
Линейные операторы могут отображать не только пространства конечной размерности, но и бесконечномерные пространства. Так, оператор дифференцирования может рассматриваться также в пространстве всех непрерывных функций. (В этом пространстве нет конечного базиса). В этом случае, очевидно, оператор не может быть задан матрицей конечного порядка.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студента самое главное не сдать экзамен, а вовремя вспомнить про него. 10219 –  | 7588 –
| 7588 –  или читать все.
или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Матрица линейного оператора
Определение 1. Если задан закон, который каждому вектору x?? ставит в соот ветствие вектор y . то говорят, что в линейном пространстве ? задан оператор A , при этом пишут:
Определение 2. Оператор A называется линейным, если для любых x 1 ?? и x 2 ?? и произвольного числа ? выполняются условия:
Рассмотрим теперь в евклидовом пространстве E n базис e 1 ,e 2 . e n и пусть в этом пространстве определён линейный оператор A : y = A x .
Разложим векторы x и y по базису e 1 ,e 2 . e n :

В силу линейности оператора A можно написать
Заметим, что каждый вектор  , следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.
, следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.


В силу единственности разложения по данному базису мы можем при равнять коэффициенты при базисных векторах в правых частях формул (1) и (2); тогда получим:
Получили, что линейному оператору A в данном базисе соответствует квадратная матрица
которая называется матрицей линейного оператора A , i -й столбец которой состоит из координат вектора Ae i (i = 1,2. n ) относительно данного базиса. Отметим, что матрица A оператора A зависит от выбора базиса e 1 ,e 2 . e n .
Итак, мы показали, что всякому линейному оператору A в евклидовом пространстве E n соответствует матрица A ; можно доказать и обратное утверждение: всякую квадратную матрицу A можно рассматривать как матрицу некоторого линейного оператора A в данном базисе e 1 ,e 2 . e n .
Представляют интерес невырожденные линейные операторы, т.е. такие операторы, матрицы которых имеют обратную A -1 , т.е. также являются невырожденными. В этом случае каждому вектору y (образу), определённому соотношением, отвечает единственный вектор x (прообраз) и при этом имеет место матричное равенство: X = A -1 ? Y .
Примеры линейных операторов
1. В пространстве 2-мерных векторов линейным оператором является правило
связывающее вектор-прообраз  с вектором-образом
с вектором-образом 
2. В пространстве бесконечно дифференцируемых функций линейным оператором является операция дифференцирования, ставящая в соответствие каждому элементу этого простран ства его производную функцию.
3. В пространстве многочленов P n (t) линейным оператором является операция умножения многочлена на независимую переменную t .
Пример: Известны образы базисных векторов E 3 под действием оператора A :
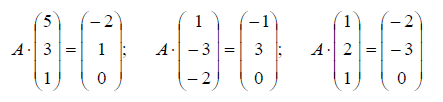
Найти матрицу этого оператора в исходном базисе.
Решение: По определению y = A x, значит в матричном виде можно записать, что A = X -1 Y . Для нашего примера получаем

Действия над операторами
Сложение линейных операторов. Пусть x?E n , A и B – два линейных оператора в этом пространстве.
Определение 1. Суммой линейных операторов A и B в E n называется оператор C, определяемый равенством Cx = A x + Bx , где x – любой вектор из E n .
Сумма линейных операторов является линейным оператором, причём его матрица C = A + B, где A и B – матрицы линейных операторов A и B .
Умножение линейного оператора на число. Пусть x?E n , линейный оператор A определён в E n , ? – некоторое число.
Определение 2. Произведением линейного оператора A на число ? называется оператор ?A , определяемый равенством  .
.
?A является линейным оператором, а матрица этого линейного оператора получается из матрицы A умножением её на число ? , т.е. она равна ? ? A.
Умножение линейных операторов. Пусть x? E n , y ? E n , z ? E n и кроме того в E n определены линейные операторы A и B таким образом, что y = Bx, z = A y .
Определение 3. Произведением A ? B линейных операторов A и B называется оператор C, определяемый соотношением Cx = A (Bx) .
Таким образом, перемножение линейных операторов состоит в последовательном их применении по отношению к вектору x .
Рассмотрим матрицы – столбцы:
и обозначим через A, B и C – соответственно матрицы линейных операторов A, B и C. Тогда Z = A ? (B ? X) = (A ? B) ? X = C ? X , таким образом, C = A ? B, т.е. матрица произведения линей ных операторов также является линейным оператором.
a) (A ? B)(x + y) = A (B(x + y)) = A (Bx + By) = A (Bx) + A (By) = = (A ? B) ? x + (A ? B) ? y
б) (A ? B)(? x) = A (B(? x)) = A (?Bx) =?A (Bx) =? (A ? B)x
Свойства умножения линейных операторов вытекают из свойств умножения матриц.
Определение 4. Линейные операторы A и В называются равными, если 
 . Равенство операторов обозначается как A = B .
. Равенство операторов обозначается как A = B .
Определение 5. Оператор E называется единичным (или тождественным) оператором, если каждому элементу x линейного пространства  он ставит в соответствие тот же самый элемент, то есть
он ставит в соответствие тот же самый элемент, то есть 
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида  , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
, сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы  и
и  соответственно. Пусть задано отображение
соответственно. Пусть задано отображение
где A – m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
 |
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
 |
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
Сделаем следующее обозначение:
 |
(6) |
Тогда равенство (5) примет следующий вид:
 |
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2. m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2. n с коэффициентами aij i=1,2. m; j=1,2. n.
Построим матрицу A с элементами aij:
 |
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B – mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej= Aej+ Bej= | n | (aij+bij) ej |
| ∑ | ||
| j= 1 |
Следовательно оператору C отвечает матрица  ,где i=1,2. m, j=1,2. n, т.е.
,где i=1,2. m, j=1,2. n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
Ядро и образ линейного отображения
Ядром линейного отображения называется множество таких векторов , что , т.е. множество векторов из , которые отображаются в нулевой вектор пространства . Ядро отображения обозначается:
Образом линейного отображения называется множество образов всех векторов из . Образ отображения обозначается или
Заметим, что символ следует отличать от — мнимой части комплексного числа.
Примеры ядер и образов линейных отображений
1. Ядром нулевого отображения является все пространство , а образом служит один нулевой вектор, т.е.
2. Рассмотрим отображение , которое ставит в соответствие каждому вектору n-мерного линейного пространства его координатный столбец относительно заданного базиса . Ядром этого отображения является нулевой вектор пространства , поскольку только этот вектор имеет нулевой координатный столбец . Образ преобразования совпадает со всем пространством , так как это преобразование сюръективно (любой столбец из является координатным столбцом некоторого вектора пространства ).
3. Рассмотрим отображение , которое каждому вектору n-мерного евклидова пространства ставит в соответствие алгебраическое значение его проекции на направление, задаваемое единичным вектором . Ядром этого преобразования является ортогональное дополнение — множество векторов, ортогональных . Образом является все множество действительных чисел .
4. Рассмотрим отображение , которое каждому многочлену степени не выше ставит в соответствие его производную. Ядром этого отображения является множество многочленов нулевой степени, а образом — все пространство .
Свойства ядра и образа линейного отображения
1. Ядро любого линейного отображения является подпространством: .
В соответствии с определением требуется доказать, что множество является непустым и замкнутым относительно операций сложения векторов и умножения вектора на число. В самом деле, из однородности отображения следует, что
т.е. нулевой вектор отображается в нулевой вектор . Следовательно, ядро любого линейного отображения не является пустым и содержит, по крайней мере, нулевой элемент: . Покажем, что множество замкнуто по отношению к операциям сложения векторов и умножения вектора на число. Действительно:
Следовательно, множество является линейным подпространством пространства .
2. Образ любого линейного отображения является подпространством: .
В самом деле, докажем, например, замкнутость множества по отношению к операции умножения вектора на число. Если , то существует вектор такой, что . Тогда , то есть .
Поскольку ядро и образ линейного отображения являются линейными подпространствами (свойства 1 и 2), можно говорить об их размерностях.
Дефектом линейного отображения называется размерность его ядра: , а рангом линейного отображения — размерность его образа: .
3. Ранг линейного отображения равен рангу его матрицы (определенной относительно любых базисов).
В самом деле, если любой базис пространства , то . Поэтому максимальное число линейно независимых векторов системы (ранг системы векторов) равно максимальному числу линейно независимых столбцов матрицы отображения, т.е. рангу матрицы: .
4. Линейное отображение инъективно тогда и только тогда, когда , другими словами, когда дефект отображения равен нулю: .
Действительно, образом нулевого вектора служит нулевой вектор . Поэтому, если отображение инъективно, то ядро содержит только нулевой вектор , иначе два разных вектора имели бы один и тот же образ . Обратно, при условии разные векторы не могут иметь одинаковые образы , так как в этом случае из равенств , следует, что ненулевой вектор (приходим к противоречию).
5. Линейное отображение сюръективно тогда и только тогда, когда , другими словами, когда ранг отображения равен размерности пространства образов: .
6. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда и одновременно.
Теорема (9.1) о размерностях ядра и образа. Сумма размерностей ядра и образа любого линейного отображения равна размерности пространства прообразов:
Действительно, пусть . Выберем в подпространстве базис и дополним его векторами до базиса всего пространства . Покажем, что векторы образуют базис подпространства .
Во-первых, , так как образ любого вектора линейно выражается через векторы
Во-вторых, образующие линейно независимы. Если их линейная комбинация равна нулевому вектору:
то вектор принадлежит ядру (его образ — нулевой вектор). Однако, по построению этот вектор принадлежит алгебраическому дополнению . Учитывая, что , заключаем: . Получили разложение нулевого вектора по линейно независимой системе векторов, значит, все коэффициенты . Поэтому равенство справедливо только для тривиальной линейной комбинации, т.е. система векторов линейно независимая.
Таким образом, векторы образуют базис подпространства , а его размерность определяется количеством базисных векторов, т.е. , что равносильно (9.3).
Следствие. Линейное отображение биективно (значит, обратимо) тогда и только тогда, когда обратима его матрица (определенная относительно любых базисов).
Действительно, для обратимости преобразования (см. свойство 6) его матрица (размеров ) должна удовлетворять условиям (см. свойства 3,4,5):
Тогда по теореме 9.1 заключаем, что , т.е. матрица — квадратная n-го порядка и невырожденная , что и требовалось доказать.
Обратимые линейные отображения называются также невырожденными (имея в виду невырожденность их матрицы).
Линейные операторы
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y= A(x) или y= Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы и соответственно. Пусть задано отображение
где A – m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
|
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
|
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
Сделаем следующее обозначение:
|
(6) |
Тогда равенство (5) примет следующий вид:
|
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2. m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2. n с коэффициентами aij i=1,2. m; j=1,2. n.
Построим матрицу A с элементами aij:
|
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B – mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej= Aej+ Bej= | n | (aij+bij) ej |
| ∑ | ||
| j= 1 |
Следовательно оператору C отвечает матрица ,где i=1,2. m, j=1,2. n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
[spoiler title=”источники:”]
http://mathhelpplanet.com/static.php?p=yadro-i-obraz-linyeinogo-otobrazheniya
http://matworld.ru/linear-algebra/linear-operator.php
[/spoiler]
Линейный
оператор ![]() ,
,
действующий из пространства ![]()
в пространство ![]() ,
,
ставит в соответствие каждому вектору
![]()
определенный вектор ![]()
из ![]() .
.
При этом вектор ![]()
называется образом
вектора
![]() ,
,
а вектор ![]()
– прообразом
вектора
![]()
при отображении ![]() .
.
Пусть
![]()
и ![]()
– некоторые базисы линейных пространств
![]()
и ![]()
соответственно. Тогда ![]() ,
,
![]()
и координаты вектора – образа ![]()
связаны с координатами вектора – прообраза
![]()
соотношением
 ,
,
(7.2.1)
в
котором ![]()
– матрица линейного оператора ![]()
в паре базисов ![]()
и ![]() .
.
В
случае, когда пространства ![]()
и ![]()
совпадают, базисы ![]()
и ![]()
также совпадают, и формула (7.2.1) принимает
вид
 .
.
(7.2.2)
Образом
(областью
значений)
линейного
оператора
![]()
называется
множество всех элементов ![]()
вида ![]() .
.
Образ линейного оператора является
подпространством пространства ![]()
и обозначается ![]() .
.
Размерность образа называется рангом
оператора
и обозначается ![]() .
.
Ядром
линейного оператора
![]()
называется
множество всех векторов пространства
![]() ,
,
которые переводятся оператором ![]()
в нулевой вектор пространства ![]() .
.
Ядро линейного оператора является
подпространством пространства ![]()
и обозначается ![]() .
.
Размерность ядра называется дефектом
оператора
и обозначается ![]() .
.
Сумма
ранга и дефекта оператора
![]()
равна размерности пространства
![]() .
.
Ранг
линейного оператора равен рангу матрицы
этого оператора.
Базис
системы векторов – столбцов матрицы
линейного оператора ![]()
образует систему координатных столбцов
базиса образа ![]() .
.
Базис подпространства решений однородной
системы линейных алгебраических
уравнений с матрицей оператора ![]()
образует базис ядра ![]() .
.
Пример
1.
Из пространства ![]()
с базисом ![]()
в пространство ![]()
с базисом ![]()
действует линейный оператор ![]() ,
,
имеющий в данной паре базисов матрицу
 .
.
Найдите столбец координат в базисе ![]()
образа вектора ![]()
и столбец координат в базисе ![]()
прообраза вектора ![]() .
.
Решение.
Столбец координат образа вектора ![]()
в базисе ![]() находим
находим
непосредственно по формуле (7.2.1):
 .
.
Для
определения прообраза вектора ![]()
по той же формуле (7.2.1) имеем
 ,
,
или,
что то же самое,

Отсюда
находим все прообразы ![]()
вектора ![]() ,
,
где ![]()
– свободная переменная, принимающая
произвольные значения.
Пример
2.
В пространстве ![]() с
с
базисом ![]() линейный
линейный
оператор ![]()
переводит векторы ![]() ,
,
![]() в
в
векторы ![]() ,
,
![]()
соответственно. Найдите матрицу оператора
![]() в
в
базисе ![]() .
.
Решение.
Пусть  –
–
матрица оператора ![]() в
в
базисе ![]() .
.
Тогда из условий ![]() ,
,
![]()
по формуле (7.2.2) имеем  ,
,

или,
в подробной записи,

Отсюда
получаем ![]()
Следовательно,
![]() .
.
Пример
3.
Найдите базис ядра и базис образа
линейного оператора пространства ![]() ,
,
если этот оператор задан матрицей  .
.
Решение.
При помощи элементарных преобразований
над строками матрицы ![]()
приведём её к ступенчатому виду:
 .
.
Отсюда
следует, что ![]() .
.
Базис ![]() составляют,
составляют,
например, векторы ![]()
и ![]() .
.
Дефект
оператора найдём по формуле
![]() ,
,
т.е.
фундаментальная система решений
однородной системы линейных алгебраических
уравнений с матрицей ![]()
будет состоять из одного вектора. Общее
решение однородной системы можно
записать в виде ![]() .
.
Полагая ![]()
получаем базисный вектор ![]() .
.
7.2.1.
Линейный оператор ![]() переводит
переводит
вектор ![]()
в вектор![]() .
.
Найдите образ вектора ![]()
и прообраз вектора ![]() ,
,
если
![]()
![]() ,
,
![]() ,
,
![]() ;
;
![]()
![]() ,
,
![]() ,
,
![]() ;
;
![]()
![]() ,
,
![]() ,
,
![]() .
.
7.2.2.
Линейный оператор ![]() в
в
паре базисов ![]() и
и
![]()
имеет матрицу ![]() .
.
Найдите прообраз вектора ![]() ,
,
если
![]()
 ,
,
![]() ;
;
б)
 ,
,
![]() ;
;
в)
 ,
,
![]() .
.
7.2.3.
Выясните, существует ли линейный оператор
двумерного пространства, переводящий
векторы ![]() ,
,
![]()
соответственно в векторы ![]() ,
,
![]() ,
,
и найдите матрицу этого оператора в
базисе ![]() ,
,
![]() :
:
а)
![]()
б)
![]()
в)
![]()
7.2.4.
Выясните, существует ли линейный оператор
трехмерного пространства, переводящий
векторы ![]() ,
,
![]() ,
,
![]()
соответственно в векторы ![]() ,
,
![]() ,
,
![]() ,
,
и найдите матрицу этого оператора в том
же базисе, в котором даны координаты
всех векторов:
а)
![]()
б)
![]()
7.2.5.
Для указанных линейных операторов
пространства ![]()
найдите дефект и ранг, а также постройте
базисы ядра и образа. Каждый оператор
описывается своим действием на
произвольный вектор ![]() :
:
а)
![]()
б)
![]()
в)
![]()
7.2.6.
Найдите образ и ядро оператора
дифференцирования в пространстве ![]() .
.
7.2.7.
В пространстве ![]()
рассмотрите разностный
оператор
![]()
![]()
где
![]()
– фиксированное
число, отличное от нуля. Найдите его
образ и ядро.
7.2.8.
Найдите образ и ядро оператора
проектирования (см. задачу 7.1.2) на ![]()
параллельно ![]()
и оператора отражения (см. задачу 7.1.3) в
![]()
параллельно ![]() .
.
7.2.9.
Найдите базис ядра и базис образа
линейного
оператора из ![]() ,
,
заданного в некотором базисе матрицей
![]() :
:
а)
![]() ;
;
б)
 ;
;
в)
 .
.
7.2.10.
Найдите размерность линейного пространства
![]()
всех линейных операторов, действующих
в ![]()
– мерном линейном пространстве ![]()
и постройте базис пространства ![]() .
.
Соседние файлы в папке Задачник-2
- #
- #
- #
- #
- #
- #
Содержание:
- Линейные преобразования. Собственные векторы и собственные числа линейного оператора
- Собственные векторы и собственные числа линейного оператора: определение, свойства
- Нахождение собственных чисел и собственных векторов
- Базис пространства из собственных векторов линейного оператора
- Линейная модель обмена (модель международной торговли)
Линейные преобразования. Собственные векторы и собственные числа линейного оператора
Линейные преобразования (линейные операторы). Матрица линейного преобразования 
Пусть задано  -мерный пространство
-мерный пространство  . Если каждому вектору
. Если каждому вектору  поставлено в соответствие единственный вектор
поставлено в соответствие единственный вектор

этого же пространства, говорится, что в векторном пространстве  задано преобразование
задано преобразование  , или оператор
, или оператор  .
.
Вектор  – результат линейного преобразования – называют образом вектора
– результат линейного преобразования – называют образом вектора  , а выходной вектор
, а выходной вектор  – прообразом вектора
– прообразом вектора  .
.
Преобразование  называется линейным преобразованием, или линейным оператором, если для произвольных векторов
называется линейным преобразованием, или линейным оператором, если для произвольных векторов  и произвольного действительного скаляра
и произвольного действительного скаляра  выполняются условия:
выполняются условия:

То есть линейный оператор преобразует пространство  в то самое пространство. Это записывается следующим образом:
в то самое пространство. Это записывается следующим образом:

Примерами простейших линейных преобразований являются:
тождественное преобразование:  , когда каждый
, когда каждый  -мерный вектор пространства превращается в самого себя, то есть остается без изменения;
-мерный вектор пространства превращается в самого себя, то есть остается без изменения;
нулевой оператор  , когда каждый -мерный вектор пространства превращается в ноль-вектор этого же пространства, то есть
, когда каждый -мерный вектор пространства превращается в ноль-вектор этого же пространства, то есть 
Линейное преобразование  , с помощью которого осуществляется восстановление вектора
, с помощью которого осуществляется восстановление вектора  по его образу
по его образу  , называется обратным к
, называется обратным к  линейным преобразованием. В отличие от матрицы оператор записывают
линейным преобразованием. В отличие от матрицы оператор записывают  каллиграфическим
каллиграфическим шрифтом.
шрифтом.
Рассмотрим задачу об отыскании координат образа вектора  .
.
Пусть в пространстве  выбрано базис
выбрано базис  (не обязательно ортонормированный) и
(не обязательно ортонормированный) и  есть координатами вектора
есть координатами вектора  в этом базисе. Обозначим через
в этом базисе. Обозначим через  координаты вектора
координаты вектора  в выбранном базисе. по условию
в выбранном базисе. по условию  , тогда согласно линейностью оператора
, тогда согласно линейностью оператора  получим :
получим :

Но образы  тоже являются векторами с
тоже являются векторами с  , поэтому иx можно разложить по тому же базисом. Пусть
, поэтому иx можно разложить по тому же базисом. Пусть

где  коэффициенты разложения вектора
коэффициенты разложения вектора  по базису
по базису 
С учетом (5.5) соотношение (5.4) принимает вид:

Группируя члены правой части относительно векторов базиса, имеем:

С другой стороны, если  являются координатами вектора
являются координатами вектора  в базисе
в базисе  то его можно представить следующим образом:
то его можно представить следующим образом:

Сопоставляем (5.8) из (5.7) и получаем координаты вектора  :
:

Следовательно, при линейном преобразовании:

координаты образа вектора являются линейными комбинациями координат прообраза, коэффициенты при которых составляют матрицу  -го порядка (обозначим ее через
-го порядка (обозначим ее через  ):
):

Матрица  , которая в произведении (слева) с вектором с
, которая в произведении (слева) с вектором с  определяет координаты его образа при линейном преобразовании
определяет координаты его образа при линейном преобразовании  , Называется матрицей линейного преобразования
, Называется матрицей линейного преобразования  в базисе
в базисе  и пишут:
и пишут:

Каждый –  -й – столбец матрицы
-й – столбец матрицы  составляют коэффициенты разложения вектора
составляют коэффициенты разложения вектора  по базису
по базису  каждая –
каждая –  -я – строка определяет коэффициенты разложения координат вектора
-я – строка определяет коэффициенты разложения координат вектора  по координатам вектора
по координатам вектора  .
.
Обратите внимание, что  – нераздельный символ (обозначение вектораобраза), а
– нераздельный символ (обозначение вектораобраза), а  – произведение матрицы с вектором (прообразом).
– произведение матрицы с вектором (прообразом).
Каждому линейном оператору  -мерного пространства отвечает матрица
-мерного пространства отвечает матрица  -го порядка в данном базисе. И наоборот, каждой матрицы
-го порядка в данном базисе. И наоборот, каждой матрицы  -го порядка отвечает линейный оператор
-го порядка отвечает линейный оператор  -мерного пространства с определенным базисом.
-мерного пространства с определенным базисом.
Например, с помощью оператора линейных преобразований можно описать поворот произвольного вектора с пространства  вокруг начала координат на угол
вокруг начала координат на угол  против часовой стрелки. Формулы поворота осей координат (формулы перехода от исходных координат
против часовой стрелки. Формулы поворота осей координат (формулы перехода от исходных координат  и
и  к новым
к новым  и
и  , и наоборот ) определяют алгебраическую форму изображения линейного оператора поворота осей:
, и наоборот ) определяют алгебраическую форму изображения линейного оператора поворота осей:

где  оператор перехода от исходных (новых) координат к новым (исходных);
оператор перехода от исходных (новых) координат к новым (исходных);
 векторы, началом которых является точка
векторы, началом которых является точка  , а концами –
, а концами –
точки  и
и  , соответственно.
, соответственно.
По соотношению (5.12) матрица линейного преобразования}  , Описывающий поворот произвольного вектора из пространства
, Описывающий поворот произвольного вектора из пространства  вокруг начала координат на угол
вокруг начала координат на угол  против часовой стрелки, имеет вид:
против часовой стрелки, имеет вид:

а матрица обратного линейного преобразования  , то есть такого, что описывает поворот произвольного вектора из пространства
, то есть такого, что описывает поворот произвольного вектора из пространства  вокруг начала координат на угол
вокруг начала координат на угол  по часовой стрелке, имеет вид:
по часовой стрелке, имеет вид:

Теорема 5.1 (о связи между матрицами оператора в различных базисах).
Матрицы  и
и  линейного оператора
линейного оператора  в разных базисах
в разных базисах  и
и  связаны между собой соотношением:
связаны между собой соотношением:

где  матрица перехода от исходного к новому базису.
матрица перехода от исходного к новому базису.
Доказательство. Пусть линейный оператор  превращает вектор
превращает вектор  пространства
пространства  в вектор
в вектор  того самого пространства. Тогда в матричной форме связь между вектором
того самого пространства. Тогда в матричной форме связь между вектором  и его образом
и его образом  в исходном базисе можно записать как
в исходном базисе можно записать как  , а в новом – как
, а в новом – как  . Поскольку
. Поскольку  является матрицей перехода от исходного базиса к новому, то в соответствии с (4.18) имеем:
является матрицей перехода от исходного базиса к новому, то в соответствии с (4.18) имеем:

Умножим равенство (5.14) слева на матрицу  и получим
и получим  . Отсюда по определению линейного оператора имеем:
. Отсюда по определению линейного оператора имеем:  . С учетом (5.15):
. С учетом (5.15):

Сравнив соотношение  и
и  , получаем
, получаем 
Две квадратные матрицы  и
и  называются подобными, если существует такая невырожденная матрица
называются подобными, если существует такая невырожденная матрица  , матрицы и связанные соотношениями:
, матрицы и связанные соотношениями:

Соответствующие линейные операторы называются преобразованиями сходства.
Подобные матрицы описывают то же линейное преобразование, но в разных базисах, а матрица  является матрицей перехода от одного базиса к другому.
является матрицей перехода от одного базиса к другому.
Подобные матрицы имеют те же ранги, суммы элементов главной диагонали и определители.
В базисе  и
и  задана матрица линейного оператора
задана матрица линейного оператора  :
:

Определим матрицу  , которая отвечает том же оператору в базисе векторов
, которая отвечает том же оператору в базисе векторов  и
и  есть матрица
есть матрица  подобна матрице
подобна матрице  .
.
Предоставим расписание векторов нового базиса по векторам исходного базиса:  . Соответственно, матрица перехода от исходного к новому базису имеет вид:
. Соответственно, матрица перехода от исходного к новому базису имеет вид:

Ее определитель  , то есть матрица
, то есть матрица  невырожденная и имеет обратную:
невырожденная и имеет обратную:

По теореме 5.1 определяем матрицу оператора  в новом базисе:
в новом базисе:

Обратите внимание, что в новом базисе матрица оператора оказалась диагональной.
Собственные векторы и собственные числа линейного оператора: определение, свойства
Рассмотрим  -мерных линейный пространство
-мерных линейный пространство  с определенным базисом и матрицу
с определенным базисом и матрицу  , некоторого линейного оператора
, некоторого линейного оператора  пространства.
пространства.
Ненулевой вектор  называют собственным, или характеристическим вектором линейного оператора
называют собственным, или характеристическим вектором линейного оператора  (или матрицы
(или матрицы  ), если существует такое действительное число
), если существует такое действительное число  , имеет место равенство:
, имеет место равенство:

Скаляр  называется собственным, или характеристическим, числом матрицы
называется собственным, или характеристическим, числом матрицы  , или ее собственным значением, соответствует собственному вектору
, или ее собственным значением, соответствует собственному вектору  :
:
Согласно определениями собственного числа и собственного вектора имеем:
1) Если  , то каждый ненулевой вектор из
, то каждый ненулевой вектор из  является собственным вектором матрицы
является собственным вектором матрицы  , при этом
, при этом  , ведь по свойству единичной матрицы имеем
, ведь по свойству единичной матрицы имеем  ;
;
2) любой ненулевой  -мерный вектор является собственным вектором нулевой матрицы
-мерный вектор является собственным вектором нулевой матрицы  , при этом
, при этом  , так как
, так как  .
.
Поставим задачу нахождения собственных чисел и собственных векторов заданной матрицы 
Поставим задачу нахождения собственных чисел и собственных векторов заданной матрицы



Запишем матричное уравнение (5.17) в развернутом виде:
Таким образом, задача сводится к решению однородной системы  линейных уравнений с
линейных уравнений с  неизвестными. Нас интересуют (по определению собственного вектора) только ненулевые векторы, то есть нетривиальные решения системы, поэтому определитель системы (5.18) должен быть равен нулю:
неизвестными. Нас интересуют (по определению собственного вектора) только ненулевые векторы, то есть нетривиальные решения системы, поэтому определитель системы (5.18) должен быть равен нулю:

Раскрытие определителя в соотношении (5.19) дает многочлен степени  относительно
относительно  , который называется характеристическим многочленом матрицы
, который называется характеристическим многочленом матрицы  , а соотношение (5.19), которое можно представить в виде
, а соотношение (5.19), которое можно представить в виде  , определяет уравнение для нахождения собственных чисел, которое называют характеристическим уравнением матрицы .
, определяет уравнение для нахождения собственных чисел, которое называют характеристическим уравнением матрицы .
По основной теореме алгебры уравнения  любой матрицы
любой матрицы  имеет
имеет  корней, если каждый из них считать столько раз, какова его кратность. Характеристическое уравнение матрицы может иметь только действительные, но и комплексные корни, то есть числа вида
корней, если каждый из них считать столько раз, какова его кратность. Характеристическое уравнение матрицы может иметь только действительные, но и комплексные корни, то есть числа вида  где
где  действительные числа,
действительные числа,  мнимая единица.
мнимая единица.
Множество всех собственных чисел матрицы называют спектром матрицы. Если в спектре матрицы то же собственное число повторяется  раз, то говорят, что кратность этого собственного числа равна
раз, то говорят, что кратность этого собственного числа равна  .
.
Теорема 5.2 (о единственности собственного чucлa, что соответствует собственному вектору). Если  – собственный вектор матрицы
– собственный вектор матрицы  , то существует единственный скаляр
, то существует единственный скаляр  , который удовлетворяет условие
, который удовлетворяет условие  .
.
Доказательство. Предположим, что кроме собственного числа  существует еще один
существует еще один
скаляр  , такой, что
, такой, что  . Тогда должно выполняться равенство
. Тогда должно выполняться равенство  . Поскольку по определению собственный вектор является ненулевым, то есть
. Поскольку по определению собственный вектор является ненулевым, то есть  , получим
, получим  .
.
Согласно теореме 5.2 говорят, что собственный вектор  из матрицы
из матрицы  принадлежит собственному числу
принадлежит собственному числу  .
.
Теорема 5.3 (о множестве собственных векторов, принадлежащих собственному числу). Если матрица имеет собственный вектор, принадлежащий собственному числу  , то таких векторов бесконечно много.
, то таких векторов бесконечно много.
Доказательство базируется на определении собственного вектора и свойствах ассоциативности и коммутативности операции умножения матрицы на скаляр.
Действительно, пусть  собственный вектор матрицы
собственный вектор матрицы  , тогда
, тогда  . Привлечем к рассмотрению вектор
. Привлечем к рассмотрению вектор  , коллинеарный вектору
, коллинеарный вектору  , то есть
, то есть  , где
, где  , и покажем, что в также является собственным вектором матрицы
, и покажем, что в также является собственным вектором матрицы  :
:

Поскольку равенство (5.19) выполняется для произвольного  , то существует множество собственных векторов, принадлежащих данному собственному числу.
, то существует множество собственных векторов, принадлежащих данному собственному числу.
Теорема 5.4 (критерий существования собственного вектора  , соответствующего собственному числу
, соответствующего собственному числу  ). Вектор
). Вектор  тогда и только тогда является собственным вектором матрицы
тогда и только тогда является собственным вектором матрицы  , соответствующим собственному числу
, соответствующим собственному числу  , когда его координаты
, когда его координаты  образуют ненулевое решение однородной квадратной системы линейных алгебраических уравнений
образуют ненулевое решение однородной квадратной системы линейных алгебраических уравнений 
 или
или 
Доказательство сводится к тождественных преобразований матричных уравнений.
Необходимость уже доказано переходом от соотношения  , к однородной системе линейных уравнений
, к однородной системе линейных уравнений  , представленной в развернутом виде (5 18).
, представленной в развернутом виде (5 18).
Достаточность. На основании свойств действий над матрицами с учетом условия  , осуществит переход от однородной системы уравнений в матричной форме с соотношением
, осуществит переход от однородной системы уравнений в матричной форме с соотношением  :
:

Теорема 5.5 (пpo линейную независимость собственных векторов). Собственные векторы, принадлежащие различным собственным числам, является линейно независимыми.
Доказательство проведем методом от противного. Пусть  два произвольные собственные векторы, принадлежащие соответственно собственным числам
два произвольные собственные векторы, принадлежащие соответственно собственным числам  и
и 
 . Необходимо показать, что линейная комбинация этих собственных векторов
. Необходимо показать, что линейная комбинация этих собственных векторов  ноль-вектор только тогда, когда
ноль-вектор только тогда, когда  , то есть
, то есть

Предположим обратное. Пусть (5.23) выполняется при условии, что одно из чисел  не является нулем, например,
не является нулем, например, 
Умножим левую и правую части (5.23) на собственное число  . Тогда
. Тогда

Левую и правую части равенства (5.23) умножим на матрицу  слева, и, учитывая свойства операций над матрицами, получим:
слева, и, учитывая свойства операций над матрицами, получим:

Сравним (5.25) и (5.24). Получаем:

По условию теоремы  . По определению вектор
. По определению вектор  является ненулевым, поэтому равенство (5.26) возможно только при
является ненулевым, поэтому равенство (5.26) возможно только при  , то есть предположение о линейной зависимости векторов
, то есть предположение о линейной зависимости векторов  и
и  ошибочно.
ошибочно.
Если есть более двух собственных векторов, принадлежащих попарно различным собственным числам, доведение аналогичное (с использованием метода математической индукции).
Заметим, что собственные векторы, принадлежащих различным собственным числам, можно использовать как базисные векторы пространства  .
.
Теорема 5.6 (пpo сумму и произведение собственных чисел). Если  собственные числа матрицы
собственные числа матрицы  , то:
, то:
1) сумма собственных чисел равна сумме элементов главной диагонали матрицы  :
:

2) произведение собственных чисел равна определителю матрицы  :
:

Доказательство основывается на формулах Виета, которые описывают соотношение между корнями и коэффициентами многочлена  -гo степени в случае, когда его старший коэффициент равен единице.
-гo степени в случае, когда его старший коэффициент равен единице.
Рассмотрим простейший случай  . Запишем характеристическое уравнение в развернутом виде:
. Запишем характеристическое уравнение в развернутом виде:

С (5.29) по теореме Виета (для квадратного уравнения) имеем:

Сумму всех диагональных элементов матрицы называют следом (от нем. spur – след) этой матрицы и обозначают  .
.
Для квадратной матрицы произвольного порядка  теорему 5.6 в символьном виде можно записать так:
теорему 5.6 в символьном виде можно записать так:

при этом собственное число  берем столько раз, какова его кратность как корня характеристического уравнения (5.29).
берем столько раз, какова его кратность как корня характеристического уравнения (5.29).
Нахождение собственных чисел и собственных векторов
Рассмотрим алгоритм нахождения собственных чисел матрицы  и собственных векторов, которые им принадлежат.
и собственных векторов, которые им принадлежат.
Согласно соотношениями (5.18) и (5.19) имеем такой порядок отыскания собственных чисел и собственных векторов матрицы.
1. Составляем по исходной матрицей  характеристическое уравнение (5.18) и решаем его, то есть находим спектр собственных чисел.
характеристическое уравнение (5.18) и решаем его, то есть находим спектр собственных чисел.
2. Подставляем поочередно каждое собственное число в систему (5.18) и находим все ее нетривиальные решения, что и дает множество собственных векторов, принадлежащих соответствующему собственному числу.
Замечания. Множество всех собственных векторов, принадлежащих определенному собственному числу, можно представить как линейную комбинацию фундаментальных решений однородной системы уравнений согласно (4.19), гл. 4.
Найдем собственные числа и собственные векторы матрицы

Характерным уравнением этой матрицы является квадратное уравнение:

Решив его, получим собственные числа  и
и 
Теперь описываем множества  и
и  всех собственных векторов, принадлежащих найденным собственным числам.
всех собственных векторов, принадлежащих найденным собственным числам.
Для этого в матрицу  вместо
вместо  подставим поочередно значения собственных чисел, запишем соответствующую систему однородных линейных уравнений (5.18) и решим ее:
подставим поочередно значения собственных чисел, запишем соответствующую систему однородных линейных уравнений (5.18) и решим ее:

Предоставляя параметру  произвольных значений, для данного собственного числа
произвольных значений, для данного собственного числа  получим совокупность коллинеарных между собой собственных векторов.
получим совокупность коллинеарных между собой собственных векторов.
Теорема 5.7 (про собственные числа и собственные векторы симметричной матрицы).
Симметричная матрица  имеет только действительные собственные числа. Собственные векторы, принадлежащие разным собственным числам, ортогональны и линейно независимы.
имеет только действительные собственные числа. Собственные векторы, принадлежащие разным собственным числам, ортогональны и линейно независимы.
Теорема приводим без доказательства.
Проиллюстрируем прав выводов данной теоремы на примере.
Пусть имеем симметричную матрицу

Найдем собственные числа и собственные векторы этой матрицы и докажем ортогональность собственных векторов, соответствующих различным собственным числам.
1. Составим характеристическое уравнение матрицы

2. Найдем корни полученного кубического уравнения относительно  . С элементарной алгебры известно, если многочлен со старшим коэффициентом, равным единице, имеет целые корни, то их следует искать среди делителей свободного члена. Перебирая делители числа 36, убеждаемся, что
. С элементарной алгебры известно, если многочлен со старшим коэффициентом, равным единице, имеет целые корни, то их следует искать среди делителей свободного члена. Перебирая делители числа 36, убеждаемся, что  является корнем уравнения (5.30).
является корнем уравнения (5.30).
Нахождение других двух корней сводится к решению квадратного уравнения:

3. Опишем множества  и
и  собственных векторов, принадлежащих найденным собственным числам.
собственных векторов, принадлежащих найденным собственным числам.
Для этого в матрицу  вместо
вместо  подставляем поочередно значения собственных чисел, записываем соответствующую систему однородных линейных уравнений (5.17) и решаем ее методом Жордана-Гаусса:
подставляем поочередно значения собственных чисел, записываем соответствующую систему однородных линейных уравнений (5.17) и решаем ее методом Жордана-Гаусса:

Аналогично находим собственные векторы  и
и 

Система векторов  и
и  является линейно независимой, поскольку
является линейно независимой, поскольку

Убеждаемся, что векторы и – попарно ортогональны.
Для этого определим их скалярные произведения:

Поскольку скалярные произведения векторов равны нулю, то векторы попарно ортогональны.
Если в выражениях (5.31-5.33) положить  , то получим систему векторов:
, то получим систему векторов:

которая использовалась как базис пространства  в примере после теоремы
в примере после теоремы 
 и
и  . В таком базисе, то есть базисе из собственных векторов, матрица оператора
. В таком базисе, то есть базисе из собственных векторов, матрица оператора  оказалась диагональной, ее ненулевыми элементами являются собственные числа матрицы
оказалась диагональной, ее ненулевыми элементами являются собственные числа матрицы  .
.
Теорема 5.8 (о преобразовании матрицы к диагональному виду). Матрица линейного оператора в базисе  имеет диагональный вид тогда и только тогда, когда все векторы базиса являются собственными векторами матрицы .
имеет диагональный вид тогда и только тогда, когда все векторы базиса являются собственными векторами матрицы .
Теорему наводим без доказательств
Заметим, что при нахождении собственных чисел для заданной матрицы самой задачей является решение алгебраического уравнения  -й степени, что во многих случаях сделать невозможно без использования приближенных методов. Изучение приближенных методов выходит за пределы программы. Поэтому предлагаем воспользоваться известными программами MatLab, MathCad, Maple и др.
-й степени, что во многих случаях сделать невозможно без использования приближенных методов. Изучение приближенных методов выходит за пределы программы. Поэтому предлагаем воспользоваться известными программами MatLab, MathCad, Maple и др.
Следующий пример был решен в пакете MatLab, в котором конечный результат вычислений предоставляется без промежуточных выкладок.
Найдем собственные числа и соответствующие им собственные векторы матрицы

Характерным уравнением для нахождения собственных чисел является уравнение

корнями которого будут числа  а соответствующие им собственные векторы имеют вид:
а соответствующие им собственные векторы имеют вид:

Собственные числа и собственные векторы матриц имеют широкий спектр использования, в частности, в аналитической геометрии (Раздел 2), в задачах различных отраслей естественных наук и эконометрики.
Базис пространства из собственных векторов линейного оператора
По теореме 5.5 собственные векторы, принадлежащие разным собственным числам, являются линейно независимыми. Возникает вопрос, при каких условиях существует базис линейного пространства  , построенный из собственных векторов матрицы.
, построенный из собственных векторов матрицы.
Лема. Если  является собственным числом матрицы
является собственным числом матрицы  , то множество собственных векторов матрицы
, то множество собственных векторов матрицы  содержит
содержит  линейно независимых векторов, где
линейно независимых векторов, где  – ранг матрицы
– ранг матрицы  .
.
Доказательство. Согласно теореме 5.4 множество собственных векторов совпадает с множеством всех решений однородной системы линейных уравнений:

где  – собственный вектор матрицы
– собственный вектор матрицы  , что соответствует собственному числу
, что соответствует собственному числу  . По теореме 4.4 такая система имеет фундаментальную систему решений, количество векторов которой равна
. По теореме 4.4 такая система имеет фундаментальную систему решений, количество векторов которой равна  , то есть содержит
, то есть содержит  – линейно независимых векторов.
– линейно независимых векторов.
Теорема 5.9 (о существовании базиса из собственных векторов матрицы). Пусть числа  образуют множество всех различных собственных чисел матрицы
образуют множество всех различных собственных чисел матрицы  . Если сумма рангов матриц
. Если сумма рангов матриц  равна
равна  , то в пространстве
, то в пространстве  существует базис из собственных векторов матрицы
существует базис из собственных векторов матрицы  .
.
Доказательство. Согласно лемме каждое множество собственных векторов, соответствующих уравнению  , содержит независимые векторы в количестве
, содержит независимые векторы в количестве  . По теореме 5.5 собственные векторы, принадлежащие разным собственным числам, являются линейно независимыми. Тогда для матрицы
. По теореме 5.5 собственные векторы, принадлежащие разным собственным числам, являются линейно независимыми. Тогда для матрицы  общее количество линейно независимых собственных векторов составляет:
общее количество линейно независимых собственных векторов составляет:

Поскольку собственные векторы матрицы  в совокупности составляют систему
в совокупности составляют систему  линейно независимых векторов, то они образуют базис пространства
линейно независимых векторов, то они образуют базис пространства  .
.
Теорема 5.10 (о существовании базиса из собственных векторов симметричной матрицы). Если матрица  линейного оператора симметрична, то в пространстве
линейного оператора симметрична, то в пространстве  существует базис, образованный из собственных векторов матрицы
существует базис, образованный из собственных векторов матрицы  .
.
Теорему принимаем без доказательств.
Построим ортонормированный базис пространства  , состоящий из собственных векторов матрицы
, состоящий из собственных векторов матрицы

линейного преобразования  , и найдем матрицу
, и найдем матрицу  заданного преобразования в этом базисе.
заданного преобразования в этом базисе.
Согласно теореме 5.9 такой базис существует, поскольку матрица  является симметричной матрицей. Составим характеристическое уравнение матрицы
является симметричной матрицей. Составим характеристическое уравнение матрицы  :
:

и решим его:  (собственное значение кратности
(собственное значение кратности  ) и
) и 
Для каждого из двух различных собственных чисел матрицы определим фундаментальную систему решений однородной системы уравнений:  . При
. При  в результате элементарных преобразований основной матрицы системы получаем:
в результате элементарных преобразований основной матрицы системы получаем:

По последним шагом элементарных преобразований матрицы записываем общее решение системы:

Определяем фундаментальную систему решений однородной системы уравнений 

Собственные векторы  и
и  являются ортогональными, поскольку их скалярное произведение равно нулю:
являются ортогональными, поскольку их скалярное произведение равно нулю: 
При  в результате элементарных преобразований основной матрицы системы получаем:
в результате элементарных преобразований основной матрицы системы получаем:

По последнем шагом элементарных преобразований матрицы записываем общее решение системы:

Возлагаем  и получаем фундаментальный решение однородной системы уравнений
и получаем фундаментальный решение однородной системы уравнений 

Поскольку  и
и  , то все три вектора попарно ортогональны. Объединив полученные фундаментальные системы решений, иметь систему собственных векторов матрицы
, то все три вектора попарно ортогональны. Объединив полученные фундаментальные системы решений, иметь систему собственных векторов матрицы  . Они образуют ортогональный базис пространства
. Они образуют ортогональный базис пространства  . После нормирования векторы приобретают вид:
. После нормирования векторы приобретают вид:

Это и есть ортогональный базис пространства  , состоящий из собственных векторов матрицы
, состоящий из собственных векторов матрицы  .
.
По соотношению (5.13) определим матрицу  , что соответствует оператору
, что соответствует оператору  в базисе из собственных векторов. Согласно теореме 5.8 эта матрица будет иметь диагональный вид, а элементами ее главной диагонали будут собственные числа этой матрицы. Заключим с собственными векторами
в базисе из собственных векторов. Согласно теореме 5.8 эта матрица будет иметь диагональный вид, а элементами ее главной диагонали будут собственные числа этой матрицы. Заключим с собственными векторами  ,
,  и
и  матрицу
матрицу  перехода к новому базису и найдем обратную к ней матрицу
перехода к новому базису и найдем обратную к ней матрицу  :
:

По матричным уравнением (5.13) находим матрицу  , что соответствует оператору
, что соответствует оператору  в базисе из собственных векторов:
в базисе из собственных векторов:

Следовательно, мы получили диагональную матрицу третьего порядка, элементами главной диагонали которой есть собственные числа матрицы  .
.
Далее приведен пример применения собственных векторов и собственных чисел в одной из многих задач экономики.
Линейная модель обмена (модель международной торговли)
Практически все страны кроме внутреннего товарообмена осуществляют внешний товарообмен, то есть занимаются внешней торговлей. Торговля считается сбалансированной, или бездефицитной, если для каждой страны прибыль от торговли не меньше объем средств, которые она вкладывает в товарооборот (внутренний и внешний).
Постановка задачи. Несколько стран осуществляют взаимный товарообмен. Известную долю бюджетных средств, тратит каждая страна на закупку товаров у другой страны, учитывая и внутренний товарооборот. Определить, каким должно быть соотношение бюджетов партнеров для того, чтобы обеспечить бездефицитность торговли.
Построение математической модели. Введем обозначения количественных характеристик, описывающих торговлю между странами, и определим связь между этими характеристиками. Пусть  – страны, участвующие в международной торговле. Доли средств, которые тратит страна
– страны, участвующие в международной торговле. Доли средств, которые тратит страна  на закупку товаров в стране
на закупку товаров в стране  , учитывая и внутренний товарооборот
, учитывая и внутренний товарооборот  , обозначим через
, обозначим через  . Понятно, что
. Понятно, что

Матрицу  , элементами которой являются числа
, элементами которой являются числа  , называют структурной матрицей торговли:
, называют структурной матрицей торговли:

Эта матрица описывает взаимодействие стран в процессе международной торговли. Соотношение (5.34) означает, что сумма элементов каждого столбца матрицы равна
1. Если объем средств, которые тратит каждая страна на торговлю, обозначить через  , соответственно, то прибыль
, соответственно, то прибыль  страны
страны  от внутренней и внешней торговли составит
от внутренней и внешней торговли составит

Чтобы торговля каждой страны была сбалансированной, по определению должно выполняться условие  , и
, и  , то есть прибыль от торговли не должна быть меньше расходов. Однако соблюдение этого требования в виде неравенства невозможно для всех стран в совокупности. Действительно, добавим левые и правые части указанных неровностей, изменяя
, то есть прибыль от торговли не должна быть меньше расходов. Однако соблюдение этого требования в виде неравенства невозможно для всех стран в совокупности. Действительно, добавим левые и правые части указанных неровностей, изменяя  от единицы до
от единицы до  :
:

Группируя в левой части слагаемые, содержащие каждое из  , получим:
, получим:

Учитывая соотношение (5.20), получим:

Отсюда следует, что сбалансированная торговля возможна только в случае знака равенства. Это, полагаем, понятно не только на основании аналитических выкладок, но и с экономической точки зрения (и даже просто с точки зрения здравого смысла): все страны в совокупности не могут получить прибыль. Более того, для одной из стран не может выполняться знак строгого неравенства  .
.
Итак, условием сбалансированной торговли является равенства  , и
, и  , из которых получим:
, из которых получим:

Введем в рассмотрение вектор (бюджетных) средств  и подадим систему (5.39) в матричной форме:
и подадим систему (5.39) в матричной форме:

С (5.40) следует, что при условии сбалансированности торговли между странами вектор средств  должен быть собственным вектором структурной матрицы торговли
должен быть собственным вектором структурной матрицы торговли  , который принадлежит собственному числу
, который принадлежит собственному числу  . Таким образом, решение задачи сводится к нахождению этого собственного вектора , компоненты которого устанавливают соотношение между бюджетами стран, участвующих в товарообмене.
. Таким образом, решение задачи сводится к нахождению этого собственного вектора , компоненты которого устанавливают соотношение между бюджетами стран, участвующих в товарообмене.
Рассмотрим товарообмен между тремя странами. Пусть структурная матрица торговли стран  , имеет вид:
, имеет вид:

Найдем вектор средств, компонентами которого являются доли от общего объема торговли, должна вкладывать каждая из стран во внешней товарооборот для того, чтобы торговля была сбалансированной.
Искомый вектор средств является собственным вектором структурной матрицы, принадлежащий собственному значению  . Его компоненты образуют ненулевое решение однородной СЛАУ:
. Его компоненты образуют ненулевое решение однородной СЛАУ:

Поскольку система является однородной, то расширенная матрица эквивалентна основной матрицы системы. Осуществим элементарные преобразования основной матрицы этой системы уравнений:

Находим общее решение системы, в котором  – базисные переменные,
– базисные переменные,  – свободная переменная:
– свободная переменная:

Отсюда следует, что для сбалансированности торговли необходимо, чтобы средства, которые вкладывает в внешний товарооборот каждая страна, соотносились как 
Лекции:
- Разложение в ряд Фурье четных и нечетных функций
- Функции многих переменных
- Наибольшее и наименьшее значение функции
- Уравнение плоскости
- Экстремум функции трёх переменных
- Как найти вероятность: пример решения
- Свойства определенного интеграла
- Комбинаторика
- Однородные дифференциальные уравнения
- Простейшие задачи аналитической геометрии
Содержание
Для понимания материалов настоящего раздела крайне желательно ознакомиться с разделом
ЛИНЕЙНОЕ ПРОСТРАНСТВО.
Линейное отображение
Линейным отображением линейного векторного пространства $ mathbb V_{} $ с операцией сложения векторов, обозначаемой $ +_{} $,
в линейное векторное пространство $ mathbb W_{} $ с операцией сложения векторов, обозначаемой $ boxplus_{} $,
называется функция (соответствие)
$$ mathcal A: mathbb V longmapsto mathbb W $$
(т.е. определенная на $ mathbb V_{} $, имеющая
значения в $ mathbb W_{} $), обладающая свойством линейности, которое описывается одним из двух эквивалентных представлений:
$$
mathcal A (X_1 +X_2)= mathcal A(X_1) boxplus mathcal A(X_2),quad mathcal A (alpha_1 X_1)=
alpha_1 mathcal A (X_1),
$$
или
$$
mathcal A(alpha_1 X_1 + alpha_2 X_2)= alpha_1 mathcal A(X_1) boxplus alpha_2 mathcal A(X_2)
$$
указанные свойства должны быть выполнены для любых векторов $ X_1,X_2 $ пространства $ mathbb V_{} $ и любых скаляров $ alpha_1,alpha_ 2 $ (вещественных если оба пространства
вещественны, и комплексных если хотя бы одно из пространств комплексное).
Если $ Y=mathcal A(X) $, то говорят, что $ Y_{} $ — образ вектора $ X_{} $, а $ X_{} $ —
прообраз вектора $ Y_{} $ при отображении $ mathcal A_{} $. Пространство $ mathbb V_{} $ называется областью определения отображения $ mathcal A_{} $.
Образно говоря, свойство линейности отображения заключается в том, что при этом отображении образ суммы любых двух векторов совпадает с суммой образов этих векторов, а произвольное растяжение прообраза влечет за собой сообразное же растяжение образа1).
Примеры линейных отображений
П
Пример 1. Рассмотрим линейное пространство
полиномов степени не выше $ n_{} $:
$$ mathbb P_n={p(x) in mathbb R[x] mid deg p(x) le n } , ; $$
в это же множество включаем и тождественно нулевой полином (для которого степень не определяется). Операция нахождения частного и операция нахождения остатка от деления полинома $ p(x)_{} $ на заданный фиксированный полином $ g(x) in mathbb R[x], g(x) notequiv 0 $ являются линейными отображениями пространства $ mathbb P_{n} $: если
$$ p_1(x)equiv q_1(x)g(x)+r_1(x), p_2(x)equiv q_2(x)g(x)+r_2(x) $$
при $ deg r_j(x)<deg g(x) $
то
$$
(alpha_1p_1(x)+alpha_2p_2(x)) equiv
$$
$$
equiv
(alpha_1q_1(x)+alpha_2q_2(x)) g(x) + (alpha_1r_1(x)+alpha_2r_2(x)) . $$
Фактически, операция деления на $ g_{}(x) $ (с остатком) порождает два разных линейных отображения. Если $ deg g(x) = m $ при $ 0<mle n $, то операция нахождения остатка — это отображение $ mathbb P_{n} mapsto mathbb P_{m-1} $, а операция нахождения частного — это отображение $ mathbb P_{n} mapsto mathbb P_{n-m} $.
П
Пример 2. В том же линейном пространстве $ mathbb P_{n}^{} $ операция дифференцирования
$$ frac{d }{d, x}: p(x) {color{Red}{ longmapsto} } p'(x) $$
является отображением $ mathbb P_{n}^{} $ в $ mathbb P_{n-1}^{} $ линейным
поскольку
$$frac{d }{d, x} (alpha_1 p_1(x) + alpha_2 p_2(x))=
alpha_1 frac{d }{d, x} p_1(x) + alpha_2 frac{d }{d, x} p_2(x)
.
$$
Прообраз любого элемента $ mathbb P_{n-1}^{} $ неединствен:
$ frac{d }{d, x}(frac{1}{2} x^2 + const)=x $.
П
Пример 3. Операцию нахождения первообразной:
$$
int_{0}^{x}:
begin{array}{ccc}
p(x) & {color{Red}{ longmapsto} } & int_{0}^{x} p(t) d, t \
a_0x^n+a_1x^{n-1}+cdots+a_n & {color{Red}{ longmapsto} } &
displaystyle frac{a_0}{n+1}x^{n+1}+frac{a_1}{n}x^{n}+cdots+a_nx
end{array}
$$
тоже можно рассматривать как линейное отображение
$ mathbb P_n {color{Red}{ longmapsto} } mathbb P_{n+1} $. При этом прообраз каждого полинома из
$ mathbb P_{n+1} $ (если существует) будет единствен.
П
Пример 4. Линейная форма от переменных $ x_{1},dots,x_n $:
$$mathcal A(x_1,dots,x_n)=a_1x_1+dots+a_nx_n,quad {a_j }_{j=1}^{n}
subset mathbb R $$
является примером линейного отображения $ mathbb R^{n}_{} $ в $ mathbb R_{} $. Здесь тоже
прообразов у одного и того же элемента из $ mathbb W_{} $ может быть несколько:
$$mathcal A(x_1,x_2)=2x_1-x_2 mbox{ отображает вектора } X_1=[0,0]
mbox{ и } X_2=[1,2] mbox{ в } 0 .$$
П
Пример 5. Обобщением предыдущего примера является
отображение $ mathcal A: mathbb R^n longmapsto mathbb R^m $, задаваемое
$$
mathcal A
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)
= left(begin{array}{c}
a_{11}x_1+a_{12}x_2 + cdots + a_{1n}x_n \
dots \
a_{m1}x_1+a_{m2}x_2 + cdots + a_{mn}x_n
end{array}
right)=
$$
$$
=
left(begin{array}{cccc}
a_{11} & a_{12}& dots & a_{1n} \
dots & & & dots \
a_{m1} & a_{m2}& dots & a_{mn}
end{array}
right) cdot
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)
$$
при произвольной вещественной матрице. Оно является линейным — в отличие от похожего на него отображения
$$
begin{array}{ll}
tilde{mathcal A}
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)
&= left(begin{array}{c}
a_{11}x_1+a_{12}x_2 + cdots + a_{1n}x_n +b_1 \
dots \
a_{m1}x_1+a_{m2}x_2 + cdots + a_{mn}x_n + b_m
end{array}
right)= \
&=left(begin{array}{cccc}
a_{11} & a_{12}& dots & a_{1n} \
dots & & & dots \
a_{m1} & a_{m2}& dots & a_{mn}
end{array}
right) cdot
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)+
left(begin{array}{c}
b_1 \ vdots \ b_m
end{array}
right)
end{array}
$$
при хотя бы одном из чисел $ b_1,dots,b_{m} $ отличном от нуля. В самом деле, если записать последнее в матричном виде:
$$
tilde{mathcal A}(X)=Acdot X+ mathcal B,
$$
то
$$
tilde{mathcal A}(alpha X)=Acdot (alpha X)+ mathcal B ne alpha tilde{mathcal A}(X)=
alpha left(Acdot X+ mathcal B right).
$$
Для этого отображения свойство линейности не выполняется. Для отображений такого типа приходится расширять множество линейных отображений: см.
☟
AФФИННОЕ ОТОБРАЖЕНИЕ.
П
Пример 6. Предыдущим примерам
можно дать и геометрическую интерпретацию. Так, линейное отображение $ mathbb R^3 longmapsto mathbb R^3 $:
$$left(begin{array}{c}
x \ y \ z
end{array}
right) longmapsto
left(begin{array}{c}
x \ y \ 0
end{array}
right)
$$
задает ортогональную проекцию вектора $ X=(x,y,z) $ на плоcкость $ z=0 $.
Можно рассматривать его и как отображение $ mathbb R^{3} longmapsto mathbb R^2 $.
Проецирование же на произвольное подпространство может быть задано
с помощью матрицы. Так, например, отображение
$$left(begin{array}{c}
x \ y \ z
end{array}
right) longmapsto
frac{1}{3} left(begin{array}{rrr}
2 & -1 & -1 \
-1& 2 & -1 \
-1 & -1 & 2
end{array}
right)
left(begin{array}{c}
x \ y \ z
end{array}
right)
$$
задает ортогональную проекцию вектора $ X_{} $ на многообразие $ x+y+z=0 $.
Общее выражение для отображения ортогонального проецирования на линейное подпространство в $ mathbb R^{n}_{} $
☞
ЗДЕСЬ.
П
Пример 7. В линейном пространстве $ mathbb R^{mtimes n} $ матриц порядка $ mtimes n_{} $ с вещественными элементами определим два отображения:
$$ X mapsto Acdot X quad u quad X mapsto X cdot B $$
умножения слева на фиксированную матрицу $ A_{elltimes m} $ и умножения справа на также фиксированную матрицу $ B_{ntimes k} $.
Оба отображения являются линейными. Линейным также будет и отображение
$$ X mapsto Acdot X cdot B . $$
При дополнительных условиях $ m=n=ell=k $ линейным будет и отображение
$$ X mapsto Acdot X + X cdot B . $$
Оно отображает пространство $ mathbb R^{ntimes n} $ в себя.
П
Пример 8. В пространстве полиномов с вещественными коэффициентами от $ m_{} $ переменных $ x_1,x_2,dots,x_{m} $ степени не выше $ n_{} $ рассмотрим отображение
$$ f(x_1,x_2,dots,x_m) mapsto operatorname{grad} (f)= left(frac{partial f}{partial x_1}, frac{partial f}{partial x_2}, dots, frac{partial f}{partial x_m}
right) .
$$
Здесь вектор $ operatorname{grad} (f) $ называется градиентом функции $ f_{} $. Это отображение будет линейным. Для его записи используют следующий формализм. Вводят в рассмотрение специальный вектор, называемый набла2)
$$ nabla = left(frac{partial }{partial x_1}, frac{partial }{partial x_2}, dots, frac{partial }{partial x_m} right) . $$
Умножение этого вектора на функцию $ f_{} $ имеет результатом именно градиент:
$$ nabla cdot f = operatorname{grad} (f) . $$
Умножение же этого вектора по правилу скалярного произведения на вектор $ F= (f_1,f_2,dots,f_m) $,
состоящий из $ m_{} $ полиномов, порождает отображение этого вектора в полином:
$$ operatorname{div} (F) = langle nabla, F rangle =frac{partial f_1 }{partial x_1}+ frac{partial f_2 }{partial x_2}+ dots+ frac{partial f_m }{partial x_m} ; $$
он называется дивергенцией вектора $ F_{} $. Это отображение
$$ F mapsto operatorname{div} (F) $$
также будет линейным.
?
В частном случае линейных форм:
$$ f_j=a_{j1}x_1+dots+a_{jn}x_m quad npu quad jin{1,dots,m} $$
получим связь $ operatorname{div} (F) $ с одним объектом матричного анализа. Каким именно?
?
Является ли линейным отображение
$$ X longmapsto operatorname{Sp} (X) , $$
определенное в пространстве квадратных матриц порядка $ n_{} $? Здесь $ operatorname{Sp} (X) $ — след матрицы $ X_{} $.
?
Про линейное отображение $ mathcal A $ пространства $ mathbb R^{3}_{} $ в пространство $ mathbb P_3^{} $ известно, что
$$ mathcal A(1,0,1)=1+3,x+x^3, mathcal A(1,-1,0)=-1+x-x^2 . $$
Найти $ mathcal A(-1,2,1) $.
Свойства линейных отображений
§
В настоящем пункте $ mathbb O_{} $ означает нулевой вектор пространства $ mathbb V_{} $,
а $ mathbb O’ $ — нулевой вектор пространства $ mathbb W_{} $.
Два линейных отображения $ mathcal A $ и $ mathcal B $ из
$ mathbb V_{} $ в $ mathbb W_{} $ называются равными если $ mathcal A(X)=mathcal B(X) $ для любого
$ Xin mathbb V $. Нулевое отображение определяется условием
$${mathcal O}(X)=mathbb O’ quad npu quad forall Xin mathbb V .$$
Т
Теорема 1. Для любого линейного отображения $ mathcal A(X) $:
а) $ mathcal A(mathbb O)=mathbb O’ $;
б) если система $ {X_1,dots,X_k} $ линейно зависима, то и система $ { mathcal A(X_1),dots,mathcal A(X_k) } $ линейно зависима;
в) если система $ { mathcal A(X_1),dots,mathcal A(X_k) } $ линейно независима, то и система
$ {X_1,dots,X_k} $ линейно независима.
Т
Теорема 2. Линейное отображение отображает произвольное линейное многообразие пространства $ mathbb V_{} $ в линейное же многообразие пространства $ mathbb W_{} $.
Доказательство. Если
$$ mathbb M = X_0+mathcal L(X_1,dots,X_k)=
$$
$$
={X_0+alpha_1X_1+dots+ alpha_kX_k mid (alpha_1,dots,alpha_k)in mathbb R^k } ,
$$
то свойство линейности отображения $ mathcal A_{} $ дает:
$$
mathcal A( mathbb M) ={mathcal A(X_0)boxplus alpha_1mathcal A(X_1) boxplus dots boxplus alpha_kmathcal A(X_k) mid (alpha_1,dots,alpha_k)in mathbb R^k } =
$$
$$
=mathcal A(X_0) boxplus mathcal L(mathcal A(X_1),dots,mathcal A(X_k)) .
$$
Заметим, что в соответствии с теоремой 1, можно утверждать, что линейное отображение не увеличивает размерности отображаемого многообразия: $ dim mathcal A( mathbb M) le dim mathbb M $.
♦
=>
Линейное отображение отображает произвольную прямую пространства $ mathbb V_{} $ в прямую или точку пространства $ mathbb W $.
?
Доказать, что линейное отображение отображает параллельные многообразия пространства $ mathbb V_{} $ в параллельные же многообразия пространства $ mathbb W_{} $.
Т
Теорема 3. Пусть $ {X_1,dots,X_n} $ — произвольный базис $ mathbb V_{} $,
а $ Y_1,dots,Y_n $ — произвольные векторы из $ mathbb W_{} $. Существует единственное линейное отображение $ mathcal A: mathbb V longmapsto mathbb W $ такое, что$$ mathcal A(X_1)=Y_1,dots,mathcal A(X_n)=Y_n .$$
Иными словами: любое линейное отображение пространства $ mathbb V_{} $ в другое пространство однозначно определяется его заданием на базисных векторах пространства $ mathbb V_{} $.
Доказательство. Поскольку векторы $ X_1,dots,X_{n} $ — базисные, то существует
и единственно разложение любого $ Xin mathbb V_{} $: $ X=x_1X_1+cdots+x_nX_n $.
Зададим отображение $ mathcal A: mathbb V longmapsto mathbb W $ формулой
$$mathcal A(X) = x_1Y_1boxplus dots boxplus x_nY_n . $$
Легко проверить свойство его линейности. Кроме того:
$$mathcal A(X_j)=mathcal A(0cdot X_1+dots+1cdot X_j+dots+0cdot X_n)=
$$
$$
=0cdot Y_1 boxplus dots boxplus 1cdot Y_j boxplus dots boxplus 0cdot Y_n=Y_j,$$
т.е. оно удовлетворяет условиям теоремы.
Предположим теперь, что существует еще одно отображение $ mathcal B(X) $,
удовлетворяющее этим условиям: $ mathcal B(X_j)=Y_j $. Тогда
$$mathcal A(X)=x_1Y_1 boxplus cdots boxplus x_nY_n=
$$
$$
=x_1mathcal B(X_1) boxplus cdots boxplus x_nmathcal B(X_n)=mathcal B(X),$$
и, на основании определения, $ mathcal A(X)=mathcal B(X) $.
♦
Отображение $ {mathcal S}: mathbb V longmapsto mathbb W $ называется
суммой линейных отображений $ mathcal A $ и $ mathcal B $ если
$ mathcal S(X)=mathcal A(X) boxplus mathcal B(X) $ для $ forall Xin mathbb V_{} $. Отображение
$ mathcal F:mathbb V longmapsto mathbb W $ называется
произведением линейного отображения $ mathcal A_{} $ на число (скаляр)
$ lambda_{} in mathbb R $ если $ {mathcal F}(X)=lambda cdot mathcal A(X) $ для $ forall Xin mathbb V_{} $.
Т
Теорема 4. Отображения $ {mathcal S} $ и $ {mathcal F} $ — линейные.
П
Пример. В пространстве полиномов $ mathbb P_n $
операцию нахождения второй производной
$$ frac{d^2 }{d, x^2}:p(x) longmapsto p”(x)$$
тоже можно рассматривать как линейное отображение $ mathbb P_n longmapsto mathbb P_{n-1} $.
Линейным также будет и отображение
$$ frac{d^2 }{d, x^2}times Box + 2 frac{d}{d, x}times Box: p(x)
longmapsto p”(x)+2 p'(x) .$$
Т
Теорема 5. Множество $ {mathcal H}om(mathbb V,mathbb W) $ всех линейных
отображений из $ mathbb V_{} $ в $ mathbb W_{} $ образует линейное пространство и$$dim {mathcal H}om(mathbb V,mathbb W) = dim mathbb V cdot dim mathbb W .$$
Ядро и образ линейного отображения
Для линейного отображения $ mathcal A $ его ядром3) называется множество векторов из $ mathbb V_{} $, отображающихся в
$ mathbb O’ in mathbb W $:
$$mathcal{K}er (mathcal A)= left{Xin mathbb V big| mathcal A(X)=mathbb O’ right} ; $$
а его образом называется множество всех векторов из
$ mathbb W_{} $, для каждого из которых существует прообраз из $ mathbb V_{} $:
$$mathcal{I}m (mathcal A)= left{Yin mathbb W mid exists X in mathbb V, mathcal A(X)= Y
right} .$$
Фактически $ mathcal{I}m (mathcal A) $ можно назвать областью значений линейного отображения $ mathcal A_{} $.
Т
Теорема 1. $ mathcal{K}er (mathcal A) $ и $ mathcal{I}m(mathcal A) $ являются
линейными подпространствами соответствующих пространств.
Для линейного отображения $ mathcal A_{} $ его дефектом называется размерность ядра,
а его рангом — размерность образа:
$$ operatorname{dfc}(mathcal A )=dim (mathcal{K}er (mathcal A )) ,
operatorname{rank}(mathcal A )= dim (mathcal{I}m (mathcal A )) .
$$
Отображение называется невырожденным если $ operatorname{dfc}(mathcal A )=0 $.
Т
Теорема 2. Линейное отображение $ mathcal A $ невырождено тогда и только тогда, когда у каждого образа существует единственный прообраз.
Доказательство. Необходимость. Если $ mathcal A $ невырождено, то $ mathcal{K}er (mathcal A )={mathbb O} $, т.е. единственным вектором из $ mathbb V_{} $, отображающимся в $ mathbb O’ in mathbb W $ должен быть $ mathbb O_{} $. Если предположить неединственность прообраза для какого-то
$ Yin mathbb W $: $ Y=mathcal A (X_1)=mathcal A (X_2) $ при $ X_1ne X_2 $, то
$$mathbb O’=mathcal A (X_1)-mathcal A (X_2)=mathcal A (X_1-X_2)$$
и получаем противоречие с единственностью прообраза у $ mathbb O’ $.
Достаточность. Пусть $ mathcal A (X_1)ne mathcal A (X_2) $ для любых $ X_1ne X_2 $. Если бы $ mathcal{K}er (mathcal A ) $ имело ненулевую размерность, то существовал бы $ Xne mathbb O $ такой, что $ mathcal A (X)=mathbb O’ $, что противоречило бы предыдущей фразе: $ mathcal A (X)= mathcal A (mathbb O) $.
♦
Т
Теорема 3. Если $ {X_1,dots,X_{n}} $ — произвольный базис $ mathbb V_{} $,
то $ mathcal{I}m (mathcal A) $ совпадает с линейной оболочкой образов этих векторов$$ mathcal{I}m (mathcal A) ={mathcal L}left(mathcal A (X_1),dots, mathcal A (X_n) right) .$$
Доказательство. Действительно, любой вектор $ Y in mathcal{I}m (mathcal A) $ является
образом какого-то вектора $ X=x_1X_1+cdots+x_nX_n $, тогда на основании
линейности отображения:
$$ Y=mathcal A (X)=x_1mathcal A (X_1) boxplus cdots boxplus x_n mathcal A (X_n) in
{mathcal L}left(mathcal A (X_1),dots, mathcal A(X_n) right) .$$
Таким образом
$$mathcal{I}m (mathcal A) subset
{mathcal L}left(mathcal A (X_1),dots, mathcal A (X_n) right) .$$
Обратно, поскольку векторы $ mathcal A (X_1),dots, mathcal A (X_n) $ принадлежат
$ mathcal{I}m (mathcal A) $, то по теореме 1 и любая линейная комбинация
этих векторов должна принадлежать $ mathcal{I}m (mathcal A) $:
$${mathcal L}left(mathcal A (X_1),dots, mathcal A (X_n) right)
subset mathcal{I}m (mathcal A) .$$
Из двух взаимных включений множеств следует их равенство.
♦
П
Пример. Найти ядро и образ отображения $ mathbb R^3 longmapsto mathbb R^4 $
$$
mathcal A left(begin{array}{c}
x_1 \ x_2 \ x_3
end{array}
right)=
left(begin{array}{c}
x_3 \ 0 \x_1+x_2+x_3 \ x_1+x_2-x_3
end{array}
right) .
$$
Решение. Для определения $ mathcal{K}er (mathcal A) $ найдем фундаментальную
систему решений системы уравнений
$$left{ begin{array}{rrr}
x_3 &=&0 \
0 &=&0 \
x_1+x_2+x_3 &=&0 \
x_1+x_2-x_3 &=&0
end{array} right. quad Longrightarrow
X_1= left(begin{array}{r}
-1 \ 1 \0
end{array}
right)
$$
Имеем $ operatorname{dfc}(mathcal A )=1 $ и $ mathcal{K}er (mathcal A)= mathcal L (X_1) $.
Теперь для нахождения $ mathcal{I}m (mathcal A) $ воспользуемся теоремой 3:
базис следует искать среди векторов
$$Y_1=mathcal A left(begin{array}{c}
1 \ 0 \0
end{array}
right)= left(begin{array}{c}
0 \ 0 \ 1 \ 1
end{array}
right),
Y_2=mathcal A left(begin{array}{c}
0 \ 1 \0
end{array}
right)= left(begin{array}{c}
0 \ 0 \ 1 \ 1
end{array}
right),
$$
$$
Y_3=mathcal A left(begin{array}{c}
0 \ 0 \1
end{array}
right)= left(begin{array}{r}
1 \ 0 \ 1 \ -1
end{array}
right) .
$$
Имеем: $ operatorname{rank}(mathcal A )=2 $ и $ mathcal{I}m (mathcal A) = mathcal L (Y_1,Y_3) $.
♦
П
Пример. Найти ядро и образ отображения пространства полиномов $ mathbb P_3 $ в $ mathbb P_2 $, задаваемого формулой:
$$ mathcal A left(p(x)right) = x^2 p^{prime prime} (x) + p^{prime} (x) – 6, p(x) . $$
Решение. Для начала проверим, что это отображение именно $ mathbb P_3 mapsto mathbb P_2 $, т.е. при таком отображении происходит понижение степени полинома, по крайней мере на $ 1_{} $. И действительно, если $ p(x)=a_0x^3+a_1x^2+a_2x+a_3 $, то
$$ x^2 p^{prime prime} (x) + p^{prime} (x) – 6 p(x) equiv
$$
$$
equiv (-4,a_1+3,a_0)x^2+(2,a_1-6,a_2)x+(a_2-6,a_3) . $$
Теперь понятно, что $ mathcal{I}m (mathcal A) subset mathbb P_2 $, а, на самом деле, это включение может быть заменено на равенство. Действительно, в соответствии с теоремой 2, имеем:
$$ mathcal{I}m (mathcal A)= {mathcal L}left(mathcal A (1),mathcal A (x),mathcal A (x^2),mathcal A (x^3) right)=
$$
$$
= {mathcal L}left(-6,,-6,x+1 ,, -4,x^2+2,x ,, 3,x^2 right) = mathbb P_2 $$
поскольку три из четырех получившихся полиномов линейно независимы.
Теперь найдем $ mathcal{K}er (mathcal A) $, или, в альтернативной формулировке, подмножество решений дифференциального уравнения
$$ x^2 p^{prime prime} (x) + p^{prime} (x) – 6 p(x)=0 $$
во множестве $ mathbb P_3 $ (полиномов степени не выше третьей). Воспользуемся уже выведенной выше формулой для образа произвольного полинома $ p(x) in mathbb P_3 $.
Этот образ будет тождественно равным нулю полиномом при выполнении условий
$$ -4,a_1+3,a_0=0, 2,a_1-6,a_2=0, a_2-6,a_3=0 . $$
Решаем эту систему:
$$ a_0=frac{4}{3} a_1, a_2=frac{1}{3} a_1, a_3=frac{1}{18} a_1 . $$
Таким образом,
$$ mathcal{K}er (mathcal A) = left{ lambda (24,x^3+18,x^2+6,x+1) mid lambda in mathbb R right} . $$
♦
Т
Теорема 4. Пусть $ {X_1,dots,X_{{mathfrak{r}}}} $ — относительный базис $ mathbb V_{} $ над $ mathcal{K}er (mathcal{A}) $. Тогда система $ {mathcal{A}(X_1),dots,mathcal {A}(X_{{mathfrak{r}}}) } $ образует базис $ mathcal{I}m (mathcal{A}) $.
Доказательство. Любой вектор $ Xin mathbb V $ представи́м в виде $ X=X_{ast}+alpha_1X_1+dots+ alpha_{{mathfrak{ r}}}X_{{mathfrak{r}}} $, где $ X_{ast} in mathcal{K}er (mathcal{A}) $. Тогда $ mathcal{A}(X) in mathcal{L} ( mathcal{A}(X_1),dots, mathcal{A}(X_{{mathfrak {r}}})) $ и, следовательно,
$$ mathcal{I}m (mathcal{A}) = mathcal L ( mathcal{A}(X_1),dots, mathcal{A}(X_{{mathfrak{r}}})) . $$
Если векторы $ mathcal{A}(X_1),dots,mathcal{A}(X_{{mathfrak{r}}}) $ удовлетворяют равенству:
$$ beta_1 mathcal{A}(X_1) boxplus dots boxplus beta_{{mathfrak{r}}} mathcal{A}(X_{{mathfrak{r}}})= mathbb O’ , $$
то $ beta_1 X_1 + dots + beta_{{mathfrak{r}}} X_{{mathfrak{r}}} in mathcal{K}er (mathcal{A}) $. На основании определения относительного базиса из такого равенства необходимо следует $ beta_1 = dots = beta_{{mathfrak{r}}}=0 $. Таким образом,
система $ {mathcal A(X_1),dots,mathcal A(X_{{mathfrak{r}}}) } $ л.н.з.
♦
Т
Теорема 5. Имеет место равенство:
$$ dim mathbb V=dim left( mathcal{K}er (mathcal A) right) + dim left( mathcal{I}m (mathcal A) right) = operatorname{dfc}(mathcal A )+ operatorname{rank}(mathcal A ) .$$
Доказательство
☞
ЗДЕСЬ.
Утверждение $ mathbb V= mathcal{K}er (mathcal A) oplus mathcal{I}m (mathcal A) $ (здесь $ oplus $ означает прямую сумму подпространств ),
вообще говоря, неверно!
Т
Теорема 6. Пусть $ mathbb V_1 $ — линейное подпространство $ mathbb V_{} $, а $ mathbb W_1 $ — линейное подпространство $ mathbb W $, причем
$$
dim mathbb V_1 + dim mathbb W_1 =dim mathbb V .
$$
Тогда существует линейное отображение
$ mathcal A : mathbb V longmapsto mathbb W $ такое, что
$$
mathcal{K}er (mathcal A ) =mathbb V_1 , quad mathcal{I}m (mathcal A )=mathbb W_1 .
$$
Определенные в настоящем пункте множества $ mathcal{K}er (mathcal A) $ и $ mathcal{I}m(mathcal A) $ позволяют полностью решить и следующую задачу:
Задача. Установить множество всех прообразов вектора $ Y ne mathbb O^{prime} $ при линейном отображении $ mathcal A_{} $ .
Т
Теорема 7. Если $ Y notin mathcal{I}m(mathcal A) $, то у вектора $ Y in mathbb W $ не существует прообраза в $ mathbb V_{} $. Если $ X_{0} in mathbb V $ — какой-то из прообразов вектора $ Y_{} $, то все множество прообразов этого вектора является линейным многообразием в $ mathbb V_{} $, а именно:
$$ X_0 + mathcal{K}er (mathcal A) . $$
Матрица линейного отображения
Рассмотрим линейное отображение $ mathcal A: mathbb V longmapsto mathbb W $,
и пусть $ {X_1,dots,X_n} $ — базис $ mathbb V_{} $, а
$ {Y_1,dots,Y_m} $ — базис $ mathbb W_{} $. Найдем координаты векторов
$ mathcal A(X_1),dots,mathcal A(X_n) $ в базисе $ {Y_1,dots,Y_m} $:
$$
left{ begin{array}{ccr}
mathcal A(X_1)&=&{color{RubineRed} alpha }_{11}Y_1 boxplus {color{RubineRed} alpha }_{21}Y_2 boxplus dots boxplus {color{RubineRed} alpha }_{m1}Y_m, \
mathcal A(X_2)&=&{color{Green} alpha }_{12}Y_1 boxplus {color{Green} alpha }_{22}Y_2 boxplus dots boxplus {color{Green} alpha }_{m2}Y_m, \
dots & & dots, \
mathcal A(X_n)&=&alpha_{1n}Y_1 boxplus alpha_{2n}Y_2 boxplus dots boxplus alpha_{mn}Y_m.
end{array} right.
$$
Матрица
$$
{mathbf A}= left(begin{array}{cccc}
{color{RubineRed} alpha } _{11} & {color{Green} alpha }_{12}& dots & alpha_{1n} \
{color{RubineRed} alpha } _{21} & {color{Green} alpha }_{22}& dots & alpha_{2n} \
vdots & & & vdots \
{color{RubineRed} alpha } _{m1} & {color{Green} alpha }_{m2}& dots & alpha_{mn}
end{array}
right)_{mtimes n},
$$
по столбцам которой стоят координаты образов базисных векторов, называется матрицей линейного отображения $ mathcal A_{} $ в выбранных базисах.
Почему запись координат в матрицу производится по столбцам? Казалось бы, естественней ставить их по строкам ![]() Объяснение этому решению будет дано ниже.
Объяснение этому решению будет дано ниже.
Т
Теорема 1. Координаты произвольного вектора
$ X=x_1X_1+dots+x_nX_n $ и его образа $ mathcal A (X)=y_1Y_1 boxplus dots boxplus y_mY_m $
связаны формулой:
$$
left(begin{array}{l}
y_1 \ vdots \ y_m
end{array}
right) =
{mathbf A}left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right) .
$$
Вот именно для этой последней формулы необходимо было «транспонировать» запись матрицы линейного отображения в начале настоящего пункта.
Доказательство. С помощью приведенных выше формул для $ mathcal A (X_1), dots, mathcal A (X_n) $ получаем:
$$
begin{array}{rcl}
mathcal A (X)&=&mathcal A (x_1X_1+dots+x_nX_n)=x_1mathcal A (X_1) boxplus dots boxplus
x_nmathcal A (X_n)= \
&=&x_1 (alpha_{11}Y_1 boxplus dots boxplus alpha_{m1}Y_m) boxplus dots boxplus
x_n(alpha_{1n}Y_1 boxplus dots boxplus alpha_{mn}Y_m)= \
&=&underbrace{(x_1alpha_{11} +dots+x_nalpha_{1n})}_{y_1}Y_1 boxplus dots boxplus
underbrace{(x_1alpha_{m1}+dots+x_nalpha_{mn})}_{y_m}Y_m,
end{array}
$$
откуда и следует утверждение теоремы.
♦
П
Пример. Найти матрицу линейного отображения
$$
mathcal A left(begin{array}{c}
x_1 \ x_2 \ x_3
end{array}
right)=
left(begin{array}{c}
x_3 \ 0 \x_1+x_2+x_3 \ x_1+x_2-x_3
end{array}
right)
$$
в стандартных базисах пространств
$$
overbrace{left{underbrace{left[ begin{array}{c} 1 \ 0 \ 0 end{array} right]}_{=mathfrak e_{_1}} ,
underbrace{left[ begin{array}{c} 0 \ 1 \ 0 end{array} right]}_{=mathfrak e_{_2}},
underbrace{left[ begin{array}{c} 0 \ 0 \ 1 end{array} right]}_{=mathfrak e_{_3}}
right}}^{mathbb R^3} quad u quad
overbrace{left{
underbrace{left[ begin{array}{c} 1 \ 0 \ 0 \ 0 end{array} right]}_{={mathfrak E_{_1}}} ,
underbrace{left[ begin{array}{c} 0 \ 1 \ 0 \0 end{array} right]}_{=mathfrak E_{_2}},
underbrace{left[ begin{array}{c} 0 \ 0 \ 1 \0 end{array} right]}_{=mathfrak E_{_3}} ,
underbrace{left[ begin{array}{c} 0 \ 0 \ 0 \1 end{array} right]}_{=mathfrak E_{_4}}
right}
}^{mathbb R^4}
$$
Решение.
$$ mathcal A(mathfrak e_1)=
left[ begin{array}{c} 0 \ 0 \ 1 \ 1 end{array} right]=0cdot mathfrak E_{_1}+0cdot mathfrak E_{_2}+1cdot mathfrak E_{_3}+1cdot mathfrak E_{_4} ;quad mathcal A(mathfrak e_2)=
left[ begin{array}{c} 0 \ 0 \ 1 \ 1 end{array} right]=0cdot mathfrak E_{_1}+0cdot mathfrak E_{_2}+1cdot mathfrak E_{_3}+1cdot mathfrak E_{_4} ;
$$
$$
mathcal A(mathfrak e_3)=
left[ begin{array}{r} 1 \ 0 \ 1 \ -1 end{array} right]=1cdot mathfrak E_{_1}+0cdot mathfrak E_{_2}+1cdot mathfrak E_{_3}-1cdot mathfrak E_{_4} .
$$
Матрица отображения $ mathcal A_{} $ в выбранных базисах:
$$ mathbf A=
left(begin{array}{ccr}
0 & 0 & 1 \
0 & 0 & 0 \
1& 1 & 1 \
1 & 1 & -1
end{array}
right)
$$
совпадает с матрицей коэффициентов при переменных $ x_1,x_2,x_3 $ в выражениях координат вектора $ mathcal A(X) $.
♦
П
Пример. Найти матрицу линейного отображения пространства полиномов $ mathbb P_3 $ в $ mathbb P_2 $, задаваемого формулой:
$$ mathcal A left(p(x)right) = x^2 p^{prime prime} (x) + p^{prime} (x) – 6 p(x) . $$
Базисом пространства $ mathbb P_3 $ выбран $ {1,x,x^2,x^3} $, а базис пространства
$ mathbb P_2 $ состоит из полиномов Лежандра
$$ {P_0(x)=1, P_1(x)= x, P_2(x)=frac{1}{2}(3,x^2-1) } .$$
Решение. В предыдущем ПУНКТЕ уже были получены выражения:
$$ mathcal A(1)=-6, mathcal A(x)=-6,x+1, mathcal A(x^2)=-4,x^2+2,x
, mathcal A(x^3)=3,x^2 .$$
Если бы базис пространства $ mathbb P_2 $ составляли полиномы, входящие в базис исходного пространства,
т.е. $ {1,x,x^2} $, то матрица линейного отображения построилась бы достаточно просто:
$$
mathbf B=
left(
begin{array}{rrrr}
-6 & 1 & 0 & 0 \
0 &-6 & 2 & 0 \
0 & 0 & -4 & 3 \
end{array}
right) .
$$
Однако базис пространства $ mathbb P_2 $ отличается от $ {1,x,x^2} $ в последнем полиноме: $ P_2(x) notequiv x^2 $. Координаты $ mathcal A(1) $ и $ mathcal A(x) $ остаются прежними, а вот $ mathcal A(x^2) $ и $ mathcal A(x^3) $ приходится переписывать под базис из полиномов Лежандра:
$$ -4,x^2+2,x equiv a_{13}cdot 1 + a_{23}cdot x + a_{33} cdot left( frac{1}{2}(3,x^2-1)
right) . $$
Откуда получаем: $ a_{13}=-4/3, a_{23}=2, a_{33}=-8/3 $. Аналогично
$$ 3,x^2equiv P_0(x)+2,P_2(x) $$
и, следовательно, матрица линейного отображения:
$$
mathbf A=
left(
begin{array}{rrrr}
-6 & 1 & -4/3 & 1 \
0 &-6 & 2 & 0 \
0 & 0 & -8/3 & 2 \
end{array}
right) .
$$
♦
Т
Теорема 2. Существует изоморфизм между линейным пространством $ {mathcal H}om(mathbb V,mathbb W) $ (линейных отображений из $ mathbb V_{} $ в $ mathbb W_{} $)
и линейным пространством матриц $ mathbb R^{mtimes n } $.
Фактически теоремы $ 1_{} $ и $ 2_{} $ сводят рассмотрение произвольного линейного отображения $ mathcal A_{} $ пространства $ mathbb V_{} $ в пространство $ mathbb W_{} $ к рассмотрению отображения арифметического пространства $ n_{} $-компонентных столбцов в арифметическое пространство $ m_{} $-компонентных столбцов
$$ Y=mathbf AX quad mbox{ при } quad Xin mathbb R^n, Yin mathbb R^m ; $$
это отображение задается $ mtimes n_{} $-матрицей $ mathbf A_{} $. Получается, что для полного задания исходного линейного отображения достаточно знать только результат его действия на базисные векторы пространства $ mathbb V_{} $. После фиксирования базисов обоих пространств и установления матрицы линейного отображения, можно «забыть» о природе этих пространств и исследовать свойства отображения в «переводе на язык» умножения матрицы на столбец. В частности, «почти даром» получаем следующий результат:
Т
Теорема 3. Если $ A_{} $ — матрица линейного отображения $ mathcal A_{} $ в каких-то выбранных базисах пространств $ mathbb V_{} $ и $ mathbb W_{} $, то
$$operatorname{rank} (mathcal A)=operatorname{rank}( A ), operatorname{dfc} (mathcal A)=n-operatorname{rank}( A ) .$$
Ядро линейного отображения
$$ Y=AX quad mbox{ при } quad Xin mathbb R^n, Yin mathbb R^m, quad A in mathbb R^{mtimes n } $$
часто называется ядром матрицы $ A_{} $ или нуль-пространством матрицы $ A_{} $ и также обозначается $ {mathcal K}er (A) $. Наряду с определением ядра матрицы через свойства отображения
$ AX $, можно дать ему и другую интерпретацию:
Т
Теорема 4. Если в пространстве $ mathbb R_{}^{n} $, рассматриваемом как пространство $ n_{} $-строк, ввести скалярное произведение формулой
$$ langle X,Y rangle=x_1y_1+x_2y_2+dots+x_ny_n quad npu quad X=[x_1,x_2,dots,x_n], Y=[y_1,y_2,dots,y_n] , $$
то $ {mathcal K}er (A) $ образует ортогональное дополнение линейной оболочки строк этой матрицы в пространстве $ mathbb R_{}^{n} $:
$$ {mathcal K}er (A) bot mathcal L ( A^{[1]}, A^{[2]},dots, A^{[m]} ),
{mathcal K}er (A) oplus mathcal L ( A^{[1]}, A^{[2]},dots, A^{[m]} ) = mathbb R_{}^{n} .
$$
Дефектом матрицы4) $ A_{} $ будем называть размерность ядра этой матрицы, или, что то же, число элементов фундаментальной системы решений системы линейных однородных уравнений $ AX=mathbb O $. В соответствии с результатами, приведенными
☞
ЗДЕСЬ:
$$ operatorname{dfc}(A) = n – mathfrak r npu mathfrak r = operatorname{rank}(A) . $$
Вернемся теперь к общему случаю линейного пространства.
Задача. Как изменяется матрица линейного отображения $ mathcal A_{} $ при изменении
базисов?
Т
Теорема 5. Пусть $ {{mathfrak X}_1,dots,{mathfrak X}_n } $ — новый базис пространства $ mathbb V_{} $, $ { {mathfrak Y}_1,dots,{mathfrak Y}_m } $— новый базис $ mathbb W_{} $, и в этих
базисах линейное отображение $ mathcal A $ имеет матрицу $ {mathbf B} $. Если $ C_{} $ — матрица перехода от старого базиса к новому в пространстве $ mathbb V_{} $, а $ D_{} $ — матрица перехода от старого базиса к новому в пространстве $ mathbb W_{} $, то
$$ {mathbf B}=D^{-1}cdot {mathbf A} cdot C . $$
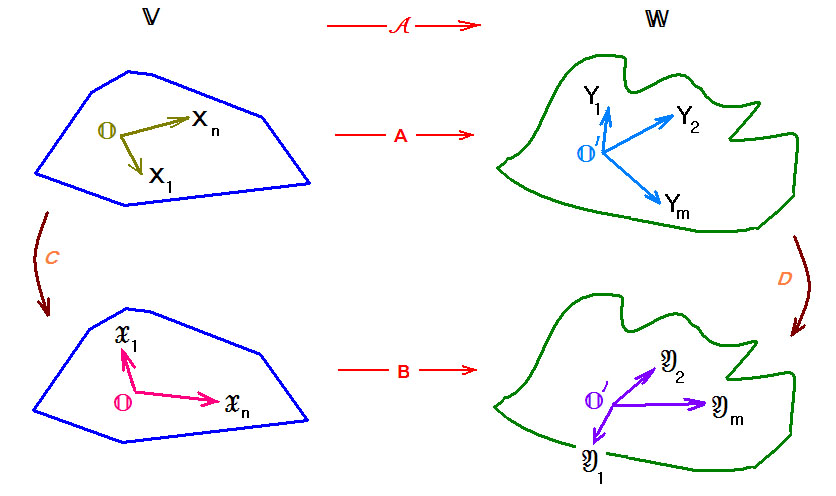
Доказательство. Действительно, координаты произвольного вектора
$$ X=x_1X_1+dots+x_nX_n = {mathfrak x}_1 {mathfrak X}_1+dots+ {mathfrak x}_n {mathfrak X}_n ,$$
и его образа
$$ Y =mathcal A(X)=y_1Y_1 boxplus dots boxplus y_mY_m= {mathfrak y}_1{mathfrak Y}_1 boxplus dots boxplus {mathfrak y}_m{mathfrak Y}_m $$
связаны следующими соотношениями: с одной стороны, на основании теоремы 1,
$$
left(begin{array}{c}
y_1 \ vdots \ y_m
end{array}
right) = {mathbf A}left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right), qquad
left(begin{array}{c}
{mathfrak y}_1 \ vdots \ {mathfrak y}_m
end{array}
right) = {mathbf B}left(begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array}
right) .
$$
с другой стороны, на основании результатов пункта
☞
ПРЕОБРАЗОВАНИЕ КООРДИНАТ ПРИ ЗАМЕНЕ БАЗИСА,
$$
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)=C left(begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array}
right),
qquad
left(begin{array}{c}
y_1 \ vdots \ y_m
end{array}
right)=D left(begin{array}{c}
{mathfrak y}_1 \ vdots \ {mathfrak y}_m
end{array}
right).
$$
Получаем цепочку равенств:
$$
{mathbf B}left(begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array}
right)=
left(begin{array}{c}
{mathfrak y}_1 \ vdots \ {mathfrak y}_m
end{array}
right) =D^{-1}left(begin{array}{c}
y_1 \ vdots \ y_m
end{array}
right)=D^{-1} {mathbf A}left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)=D^{-1} {mathbf A} C left(begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array}
right).
$$
Поскольку равенство справедливо для любого столбца координат, то оно справедливо и для столбцов
$$
left(begin{array}{c}
1 \ 0 \ vdots \ 0
end{array}
right) ,
left(begin{array}{c}
0 \ 1 \ vdots \ 0
end{array}
right)
,dots,
left(begin{array}{c}
0 \ 0 \ vdots \ 1
end{array}
right) .
$$
Объединяя полученные $ n_{} $ равенств в одно матричное, получаем $ {mathbf B}E = D^{-1} {mathbf A} C E $, где $ E_{} $ — единичная матрица порядка $ n_{} $. Отсюда и следует утверждение теоремы.
♦
Канонический вид матрицы линейного отображения
Задача. Подобрать базисы пространств $ mathbb V_{} $ и $ mathbb W_{} $ так, чтобы матрица заданного линейного отображения $ mathcal A $ имела наиболее простой вид.
Найдем относительный базис $ mathbb V_{} $ над $ mathcal{K}er (mathcal A) $, т.е. базис $ mathcal{K}er (mathcal A) $ дополним до базиса $ mathbb V_{} $:
$$
{X_1,dots,X_{{mathfrak r}}} gets mbox{ относительный базис }
mathbb V mbox{ над } mathcal{K}er (mathcal A)
$$
$$
{X_{{mathfrak r}+1},dots,X_{n} } gets mbox{ базис } mathcal{K}er (mathcal A)
$$
Было доказано (см.
☞
теорему 4 ), что $ {mathcal A(X_1),dots,mathcal A(X_{{mathfrak r}}) } subset mathbb W $ является базисом $ mathcal{I}m (mathcal A) $. Составим базис $ mathbb W_{} $ ее дополнением:
$$
{mathcal A(X_1),dots,mathcal A(X_{{mathfrak r}})} gets
mbox{ базис } mathcal{I}m (mathcal A)
$$
$$
{ Y_{{mathfrak r}+1},dots,Y_{m}} gets mbox{ относительный базис }
mathbb W mbox{ над } mathcal{I}m (mathcal A)
$$
Т
Теорема. В выбранных базисах матрица линейного отображения $ mathcal A $ имеет следующий канонический вид:
$$
{mathbf B}=left( begin{array}{cccccc}
1 & & & & \
&1 & & &mathbb O\
& &ddots& & \
& & & 1 & \
& & & & \
&mathbb O & & & mathbb O
end{array}
right)
begin{array}{r}
left. begin{array}{r}
\ \ \ \ end{array} right} \
\ \
end{array}
begin{array}{r}
\ \ {mathfrak r} \ \ \
\ \
end{array}
= left( begin{array}{ll}
E_{{mathfrak r}times {mathfrak r}} & mathbb O_{{mathfrak r}times (n-{mathfrak r})} \
mathbb O_{(m-{mathfrak r})times {mathfrak r}} & mathbb O_{(m-{mathfrak r})times (n-{mathfrak r})}
end{array}
right) .
$$
Здесь $ {mathfrak r}= operatorname{rank} (mathcal A) $.
Доказательство. Разложим образы базисных векторов $ {X_1,dots,X_n} $ по базису пространства $ mathbb W $:
$$
begin{array}{llllllll}
mathcal A(X_1) & = 1cdot mathcal A(X_1) & boxplus 0 cdot mathcal A(X_2) & boxplus dots & boxplus 0cdot mathcal A(X_{mathfrak r})&
boxplus 0cdot Y_{{mathfrak r}+1}&boxplusdots &boxplus 0cdot Y_m, \
mathcal A(X_2) & = 0cdot mathcal A(X_1) & boxplus 1 cdot mathcal A(X_2) & boxplus dots & boxplus 0cdot mathcal A(X_{mathfrak r})&
boxplus 0cdot Y_{{mathfrak r}+1}&boxplus dots & boxplus 0cdot Y_m, \
dots & & & dots \
mathcal A(X_{mathfrak r}) & = 0cdot mathcal A(X_1) & boxplus 0 cdot mathcal A(X_2) & boxplus dots & boxplus 1cdot mathcal A(X_{mathfrak r})&
boxplus 0cdot Y_{{mathfrak r}+1}&boxplus dots & boxplus 0cdot Y_m,
end{array}
$$
а $ mathcal A(X_{{mathfrak r}+1})=mathbb O^{prime},dots, mathcal A(X_{m})=mathbb O^{prime} $ по определению
$ mathcal{K}er (mathcal A) $.
♦
Матричный формализм
§
Настоящий пункт может быть пропущен при первоначальном чтении.
В частном случае отображения $ mathbb R^{n} $ в $ mathbb R^{m} $, задаваемого матрицей в стандартных базисах пространств, результат последнего пункта можно переформулировать в следующем виде.
Т
Теорема. Любую матрицу $ A_{mtimes n} $ ранга $ mathfrak r > 0 $ можно представить в виде произведения
$$ A=Dcdot A_d cdot tilde C $$
при
$$
A_d =left( begin{array}{cccccc}
1 & & & & \
&1 & & &mathbb O\
& &ddots& & \
& & & 1 & \
& & & & \
&mathbb O & & & mathbb O
end{array}
right)
begin{array}{r}
left. begin{array}{r}
\ \ \ \ end{array} right} \
\ \
end{array}
begin{array}{r}
\ \ {mathfrak r} \ \ \
\ \
end{array}
= left( begin{array}{ll}
E_{{mathfrak r}times {mathfrak r}} & mathbb O_{{mathfrak r}times (n-{mathfrak r})} \
mathbb O_{(m-{mathfrak r})times {mathfrak r}} & mathbb O_{(m-{mathfrak r})times (n-{mathfrak r})}
end{array}
right) $$
и при невырожденных матрицах $ D_{mtimes m} $ и $ tilde C_{ntimes n} $.
Здесь матрица $ tilde C $ соответствует матрице $ C^{-1} $ из теоремы предыдущего пункта.
П
Пример. Представить матрицу
$$ A =
left(
begin{array}{rrr}
2 & – 1 & 0 \
-2/3 & 5/3 & 4/3 \
2 & – 1 & 0 \
-2/3 & 5/3 & 4/3
end{array}
right)
$$
в виде произведения из теоремы.
Решение. Здесь $ operatorname{rank} (A) =2 $, так что
$$
A_d=
left(begin{array}{ccc}
1 & 0 & 0 \
0 & 1 & 0 \
0 & 0 & 0 \
0 & 0 & 0
end{array}
right) , .
$$
Для нахождения матрицы $ C $ из теоремы предыдущего пункта ищем базис ядра отображения $ AX $, т.е. попросту говоря, фундаментальную систему решений системы уравнений $ AX=mathbb O $. Можно взять $ X=[1,2,-2]^{top} $. Этот столбец будет третьим столбцом матрицы $ C $. Первые два — любые линейно независимые с этим столбцом. Например
$$
C=
left(begin{array}{ccr}
1 & 0 & 1 \
0 & 1 & 2 \
0 & 0 & -2
end{array}
right) , .
$$
Теперь умножаем столбцы $ C_{[1]} $ и $ C_{[2]} $ на матрицу $ A $ (слева). Полученные столбцы
$$
D_{[1]}=left[2,-2/3,2,-2/3right]^{top}, D_{[2]}=left[-1,5/3,-1,5/3right]^{top}
$$
будут первыми столбцами искомой матрицы $ D $. Оставшиеся два выбираем произвольными линейно независимыми с уже найденными.
$$
D=
left(
begin{array}{rrrr}
2 & – 1 & 1 & 0 \
-2/3 & 5/3 & 0 & 1 \
2 & -1 & 0 & 0 \
-2/3 & 5/3 & 0 & 0
end{array}
right), quad tilde C= C^{-1} =
left(
begin{array}{rrr}
– 1 & 0 & 1/2 \
0 & 1 & 1 \
0 & 0 & -1/2
end{array}
right) , .
$$
♦
Разложение матрицы в произведение из теоремы не единственно. Так, например, матрицу $ tilde C $ можно выбрать в классе ортогональных матриц. Из этого замечания можно «перебросить мостик» к похожему разложению матрицы в произведение, известному как сингулярное разложение. Очень полезно в задачах обработки данных.
Линейный оператор
Линейное отображение векторного пространства $ mathbb V_{} $
в себя
$$ mathcal A : mathbb V longmapsto mathbb V $$
называется линейным преобразованием $ mathbb V_{} $ или линейным оператором на $ mathbb V_{} $. Подробнее
☞
ЗДЕСЬ.
Аффинное отображение
Линейные отображения пространства $ mathbb V_{} $ в пространство $ mathbb W_{} $ составляют подмножество более широкого класса отображений.
Рассмотрим пример $ 5_{} $
☞
ЗДЕСЬ. Отображение пространства $ mathbb R^{n}_{} $ в пространство $ mathbb R^{m} $, задаваемое соотношением
$$
begin{array}{ll}
tilde{mathcal A}
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)
&= left(begin{array}{c}
a_{11}x_1+a_{12}x_2 + cdots + a_{1n}x_n +b_1 \
dots \
a_{m1}x_1+a_{m2}x_2 + cdots + a_{mn}x_n + b_m
end{array}
right)= \
&=left(begin{array}{cccc}
a_{11} & a_{12}& dots & a_{1n} \
dots & & & dots \
a_{m1} & a_{m2}& dots & a_{mn}
end{array}
right) cdot
left(begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array}
right)+
left(begin{array}{c}
b_1 \ vdots \ b_m
end{array}
right)
end{array}
$$
будет линейным отображением при условии, что $ b_1=0,dots, b_m=0 $ и не будет линейным отображением при хотя бы одном из чисел $ b_1,dots,b_{m} $ отличном от нуля.
Тем не менее, по своему внешнему виду отображение из $ mathbb R^{n}_{} $ в $ mathbb R^{m} $, задаваемое в матричном виде как $ A, X + mathcal B $ напоминает линейную функцию $ a, x+b $, действующую в $ mathbb R $. Кажется очень несправедливым лишать подобные отображения эпитета линейный, однако же именно это и произошло в линейной алгебре и геометрии.
Аффинным5) отображением линейного векторного пространства $ mathbb V_{} $ с операцией сложения векторов, обозначаемой $ +_{} $,
в линейное векторное пространство $ mathbb W_{} $ с операцией сложения векторов, обозначаемой $ boxplus_{} $,
называется функция вида
$$ mathcal A(X) boxplus_{} mathcal B npu X in mathbb V . $$
Здесь $ mathcal A $ — линейное отображение $ mathbb V_{} $ в $ mathbb W_{} $, а $ mathcal B $ — некоторый вектор пространства $ mathbb W_{} $.
Образно говоря, аффинное отображение может быть получено сдвигом некоторого линейного отображения. Фактически же определение содержит в себе объяснение той причины, по которой аффинные отображения изучаются менее подробно, чем линейные: первые сводятся ко вторым.
Основное геометрическое свойство аффинного отображения проявилось в
☞
ПУНКТЕ для отображения линейного.
Т
Теорема. Аффинное отображение отображает произвольное линейное многообразие пространства $ mathbb V_{} $ в линейное же многообразие пространства $ mathbb W_{} $. Аффинное отображение отображает параллельные многообразия пространства $ mathbb V_{} $ в параллельные же многообразия пространства $ mathbb W_{} $.
=>
Аффинное отображение отображает произвольную прямую пространства $ mathbb V_{} $ в прямую или точку пространства $ mathbb W $.
Почему рассматриваются только линейные отображения?
Почему во всех вузовских курсах алгебры не рассматриваются более сложные отображения, задаваемые, например, нелинейными полиномами:
$$
left(
begin{array}{l}
x_1 \
x_2 \
x_3
end{array}
right) mapsto
left(
begin{array}{c}
x_1^4-sqrt{2} x_1^2x_3 + 17, x_2^5+2, x_1 – 3,x_3-14 \
x_2^{18}- x_2^7+x_1x_2^4x_3^6-x_1-5,x_2+2 \
x_2x_3^3+x_3-6 \
x_1-2,x_2+6,x_3-33
end{array}
right) ?
$$
— Да потому что про них мало что понятно. Попытки обобщения на нелинейный случай практически любого понятия, введенного для линейного отображения, приводят к нерешенной задаче. Так, для обобщения понятия ядра придется решить не решенную на настоящий момент 16-ю проблему Гильберта;
еще одна нерешенная проблема — проблема якобиана — связана с существованием обратного к полиномиальному отображению.
В одном частном случае нелинейные отображения сравнительно хорошо изучены — это отображения $ mathbb R^2 mapsto mathbb R^2 $, заданные условиями:
$$
left(
begin{array}{l}
x \
y
end{array}
right) mapsto
left(
begin{array}{l}
u(x,y) \
v(x,y)
end{array}
right) quad npu quad frac{partial u}{partial x}=frac{partial v}{partial y}, frac{partial u}{partial y}=-frac{partial v}{partial x} ;
$$
(функции $ u_{} $ и $ v_{} $ — не обязательно полиномы).
Последние два условия называются условиями Коши-Римана (Даламбера-Эйлера); из них следует, что каждая из функций $ u_{} $ и $ v_{} $ является гармонической функцией, т.е. удовлетворяет тождествам:
$$
frac{partial^2 u}{partial x^2}+frac{partial^2 u}{partial y^2}equiv 0,quad frac{partial^2 v}{partial x^2}+frac{partial^2 v}{partial y^2} equiv 0 .
$$
Подобные отображения рассматриваются в разделе математики, известном как КОМПЛЕКСНЫЙ АНАЛИЗ или теория функций комплексной переменной (ТФКП).
Как же исследовать нелинейные отображения в общем случае? — Ну, по крайней мере, можно попытаться свести их исследование к линейному случаю. Рассмотрим пример отображения из начала
пункта
$$
left(
begin{array}{l}
x_1 \
x_2 \
x_3
end{array}
right) mapsto
left(
begin{array}{c}
x_1^4-sqrt{2} x_1^2x_3 + 17, x_2^5+2, x_1 – 3,x_3-14 \
x_2^{18}- x_2^7+x_1x_2^4x_3^6-x_1-5,x_2+2 \
x_2x_3^3+x_3-6 \
x_1-2,x_2+6,x_3-33
end{array}
right) =
$$
$$
=left(
begin{array}{r}
-14 \
2 \
-6 \
-33
end{array}
right)
+
left(
begin{array}{c}
2, x_1 – 3,x_3 \
-x_1-5,x_2 \
x_3 \
x_1-2,x_2+6,x_3
end{array}
right)
+ dots
$$
В разложении каждого элемента вектора отбросим все члены степени выше первой. В результате мы получили отображение, которое можно представить в матричном виде
$$
left(
begin{array}{l}
x_1 \
x_2 \
x_3
end{array}
right) mapsto
underbrace{left(
begin{array}{r}
-14 \
2 \
-6 \
-33
end{array}
right)}_{=mathcal B}+
underbrace{left(
begin{array}{rrr}
2 & 0 & – 3 \
-1 & -5 & 0 \
0 & 0 & 1 \
1 & -2 & 6
end{array}
right)}_{=A}
left(
begin{array}{l}
x_1 \
x_2 \
x_3
end{array}
right) .
$$
Это новое отображение является аффинным отображением пространства $ mathbb R^{3} $ в пространство $ mathbb R^{4} $. Таким образом, исходное, существенно нелинейное, отображение $ mathcal F(X) $ фактически заменили аффинным $ tilde{mathcal A}(X)=AX+mathcal B $. Насколько такая замена оправдана? — Ну, по крайней мере, в одной точке эти отображения совпадают: $ mathcal F(mathbb O) = tilde {mathcal A}(mathbb O) $. Трудно ожидать, что они будут совпадать еще где-нибудь. Однако же, в малой окрестности точки $ mathbb O $ значения этих двух функций оказываются близкими!
$$
begin{array}{lll}
mathcal F left(
begin{array}{r}
0.01 \
-0.02\
0.07
end{array}
right)=
left(
begin{array}{r}
-14.19000994 \
2.090000000 \
-5.930006860 \
-32.53000000
end{array}
right); &
mathcal F left(
begin{array}{r}
0.05 \
0.12\
-0.14
end{array}
right)=
left(
begin{array}{r}
-13.47907577 \
1.349999642 \
-6.140329280 \
-34.03000000
end{array}
right); & mathcal F left(
begin{array}{r}
-0.30 \
0.25\
-0.24
end{array}
right)=
left(
begin{array}{r}
-13.82475143 \
1.049938741 \
-6.243456000 \
-35.24000000
end{array}
right) ; dots
\
tilde{mathcal A}
left(
begin{array}{r}
0.01 \
-0.02\
0.07
end{array}
right)=
left(
begin{array}{r}
-14.19000000 \
2.090000000 \
-5.930000000 \
-32.53000000
end{array}
right) ; &
tilde{mathcal A}
left(
begin{array}{r}
0.05 \
0.12\
-0.14
end{array}
right)=
left(
begin{array}{r}
-13.48000000 \
1.350000000\
-6.140000000 \
-34.03000000
end{array}
right) &
tilde{mathcal A} left(
begin{array}{r}
-0.30 \
0.25\
-0.24
end{array}
right)=
left(
begin{array}{r}
-13.88000000 \ 1.050000000 \ -6.240000000 \ -35.24000000
end{array}
right); dots
end{array}
$$
Иными словами, в некоторой достаточно малой окрестности6) точки $ X_0=mathbb O_{} $ нелинейное отображение аппроксимируется аффинным. А чем аппроксимировать за пределами этой окрестности, скажем, в окрестности вектора $ X_0=[1,-1,1]^top $? — Для этого придется привлекать аппарат разложения нелинейных функций нескольких переменных в ряды Тейлора. К счастью, функции нашего примера являются полиномиальными, поэтому этот ряд не будет содержать бесконечного числа членов. Воспользовавшись материалом пункта
☞
ФОРМУЛА ТЕЙЛОРА, получим:
$$
mathcal F left(
begin{array}{r}
x_1 \
x_2\
x_3
end{array}
right)
=
left(
begin{array}{c}
-31-sqrt{2} \
9 \
-6 \
-24
end{array}
right)+
left(
begin{array}{rrr}
(6-2,sqrt{2})(x_1-1) &+ 85, (x_2+1) & +(-sqrt{2}-3)(x_3-1)\
&-34,(x_2+1) & +6,(x_3-1) \
&(x_2+1) & -2,(x_3-1)\
(x_1-1) &- 2,(x_2+1) & +6,(x_3-1)
end{array}
right)+ dots
$$
Перепишем второе слагаемое в матричном виде:
$$
=
left(
begin{array}{c}
-31-sqrt{2} \
9 \
-6 \
-24
end{array}
right)+
left(
begin{array}{ccc}
6-2,sqrt{2} &85& -sqrt{2}-3\
0 &-34 & 6 \
0&1& -2\
1 &- 2 & 6
end{array}
right)left(
begin{array}{c}
x_1-1 \
x_2+1 \
x_3-1
end{array}
right) + dots
$$
В общем же случае, если
$$
mathcal{F} left(
begin{array}{l}
x_1 \
x_2\
vdots \
x_n
end{array}
right)=
left(
begin{array}{c}
f_1(x_1,dots,x_n) \
vdots \
f_m(x_1,dots,x_n)
end{array}
right),
$$
то, в окрестности вектора $ X_0= (x_{01},x_{02},dots,x_{0n})^{top} $ его можно аппроксимировать аффинным отображением
$$
tilde{mathcal A} left(
begin{array}{l}
y_1 \
y_2\
vdots \
y_n
end{array}
right)=
underbrace{left(
begin{array}{c}
f_1(x_{01},dots,x_{0n}) \
vdots \
f_m(x_{01},dots,x_{0n})
end{array}
right)}_{=mathcal F(X_0)}+
underbrace{left(
begin{array}{cccc}
{partial f_1}/{partial x_1} & {partial f_1}/{partial x_2} & dots & {partial f_1}/{partial x_n} \
{partial f_2}/{partial x_1} & {partial f_2}/{partial x_2} & dots & {partial f_2}/{partial x_n} \
dots & && dots \
{partial f_m}/{partial x_1} & {partial f_m}/{partial x_2} & dots & {partial f_m}/{partial x_n}
end{array}
right)}_{mathbf J}left(
begin{array}{l}
y_1 \
y_2\
vdots \
y_n
end{array}
right) ,
$$
которое рассматривается в окрестности $ Y_0=mathbb O_{} $. Здесь все частные производные в матрице $ mathbf J $ вычисляются в точке $ X_{0} $. Матрица
$$
mathbf J = left[ frac{partial f_j}{partial x_k} right]_{j=1,dots,m, atop k=1,dots,n}
$$
называется матрицей Якоби системы из $ m_{} $ функций $ {f_1(x_1,dots,x_n),dots,f_m(x_{1},dots,x_n)} $ по переменным $ x_1,dots,x_{n} $. Линейное отображение
$$
mathbf J left(
begin{array}{l}
y_1 \
y_2\
vdots \
y_n
end{array}
right)
$$
известно как дифференциал (первого порядка) функции $ mathcal F(X) $ в точке $ X_0 $.
Подводя итог, можно сказать, что линейные (аффинные) отображения служат основой анализа отображений нелинейных — но этот анализ носит локальный характер: линеаризация адекватно приближает исходное нелинейное отображение лишь в малых областях значений аргументов.
