В этой статье мы рассмотрим, как в кратчайшие сроки написать Python-скрипт, который пригодится для подсчёта числа книг на изображении. Для работы будем использовать библиотеку алгоритмов компьютерного зрения OpenCV.
Какова задача?
Посмотрите на фото ниже:
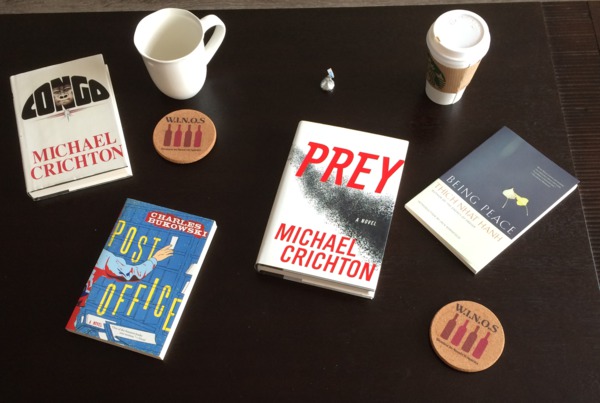
На изображении мы видим 4 книги и различные отвлекающие предметы: конфету, магниты, кофе, чашку. Наша задача — найти эти 4 книги с помощью машинного зрения и не определить как книгу ни один другой предмет.
Чтобы выполнить эту задачу, мы, кроме вышеупомянутой библиотеки OpenCV, будем использовать также и NumPy, поэтому эти библиотеки понадобится установить.
Приступаем к поиску
Открываем редактор кода, создаём новый файл с именем find_books.py и начинаем:
# -*- coding: utf-8 -*- # импортируем нужные пакеты import numpy as np import cv2 # загружаем изображение, меняем цвет на оттенки серого и уменьшаем резкость image = cv2.imread("example.jpg") gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) gray = cv2.GaussianBlur(gray, (3, 3), 0) cv2.imwrite("gray.jpg", gray)Прежде всего, надо выполнить импорт библиотеки OpenCV. Обратите внимание, что загрузка изображения с диска обрабатывается с помощью функции cv2.imread. Тут мы просто загружаем его с диска, после чего преобразуем цветовую гамму в оттенки серого.
Кроме этого, мы немного размываем изображение, дабы уменьшить ВЧ-шумы и увеличить точность приложения. После исполнения кода изображение будет выглядеть следующим образом:
То есть мы выполнили загрузку изображения с диска, преобразовали фото в оттенки серого, а потом немного размыли изображение.
Что же, давайте определим контуры объектов на изображении:
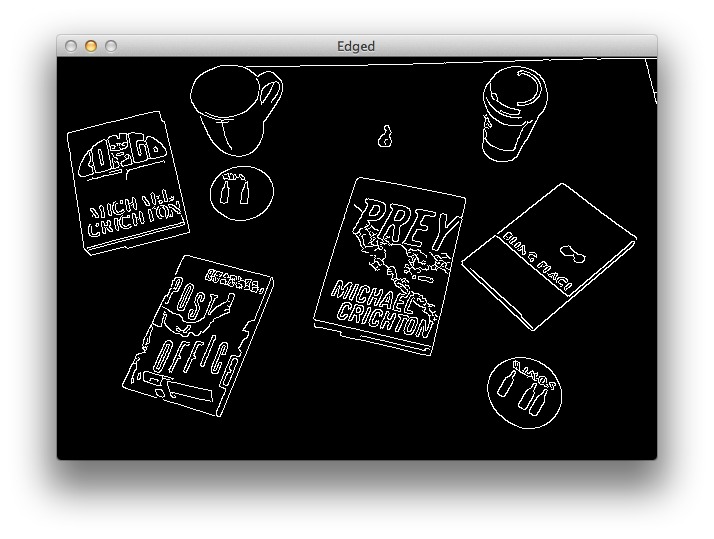
# распознаём контуры edged = cv2.Canny(gray, 10, 250) cv2.imwrite("edged.jpg", edged)Теперь изображение выглядит так:
Итак, мы определили на изображении контуры объектов. Но, как видно, часть контуров не закрыта, а между контурами есть промежутки. Дабы убрать промежутки, существующие между белыми пикселями, задействуем операцию «закрытия»:
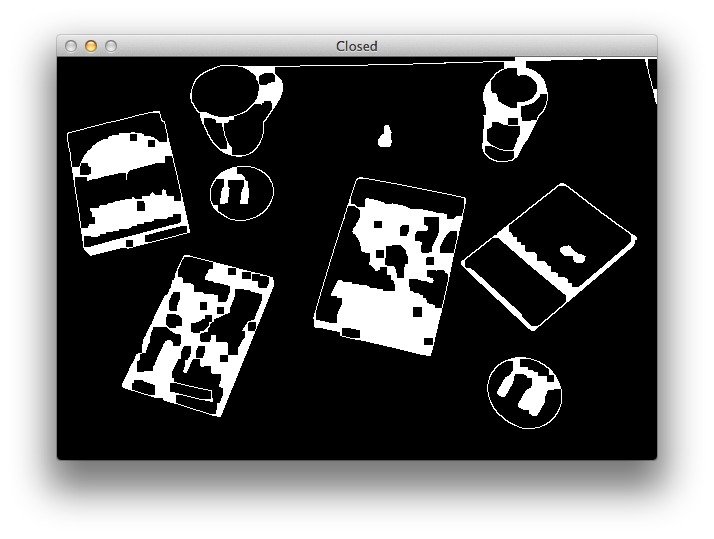
# создаём и применяем закрытие kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (7, 7)) closed = cv2.morphologyEx(edged, cv2.MORPH_CLOSE, kernel) cv2.imwrite("closed.jpg", closed)Вуаля, теперь пробелы в контурах закрыты:
Следующий этап — фактическое обнаружение контуров объектов. Теперь задействуем функцию cv2.findContours:
# находим контуры в изображении и подсчитываем число книг cnts = cv2.findContours(closed.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] total = 0Теперь несколько слов о геометрии книги. Как известно — это прямоугольник, который, соответственно, имеет 4 вершины. Следовательно, если при рассмотрении контура мы обнаружим наличие 4-х вершин, мы сможем предположить, что перед нами именно книга. Чтобы это проверить, надо выполнить цикл по каждому контуру:
# выполняем цикл по контурам for c in cnts: # сглаживаем контур peri = cv2.arcLength(c, True) approx = cv2.approxPolyDP(c, 0.02 * peri, True) # если у контура есть четыре вершины, это, скорее всего, книга if len(approx) == 4: cv2.drawContours(image, [approx], -1, (0, 255, 0), 4) total += 1При этом для каждого из контуров производится вычисление периметра (с помощью cv2.arcLength), а потом происходит аппроксимация (сглаживание) контура с помощью cv2.approxPolyDP.
Зачем выполняем аппроксимацию? Дело в том, что контур может и не быть идеальным прямоугольником, так как зашумление и тени на изображении всё же оказывают влияние. Когда мы аппроксимируем контур, мы эту проблему решаем.
В конце концов, мы осуществляем проверку, что у аппроксимируемого контура действительно есть 4 вершины. Если это так, мы рисуем вокруг книги контур с одновременным увеличением счётчика общего числа книг.
Давайте завершим этот пример и покажем полученное изображение и число книг, которые удалось найти:
# покажем результирующее изображение print("Я нашёл {0} книг на этой картинке".format(total) cv2.imwrite("output.jpg", image))На этом этапе наше фото будет выглядеть так:
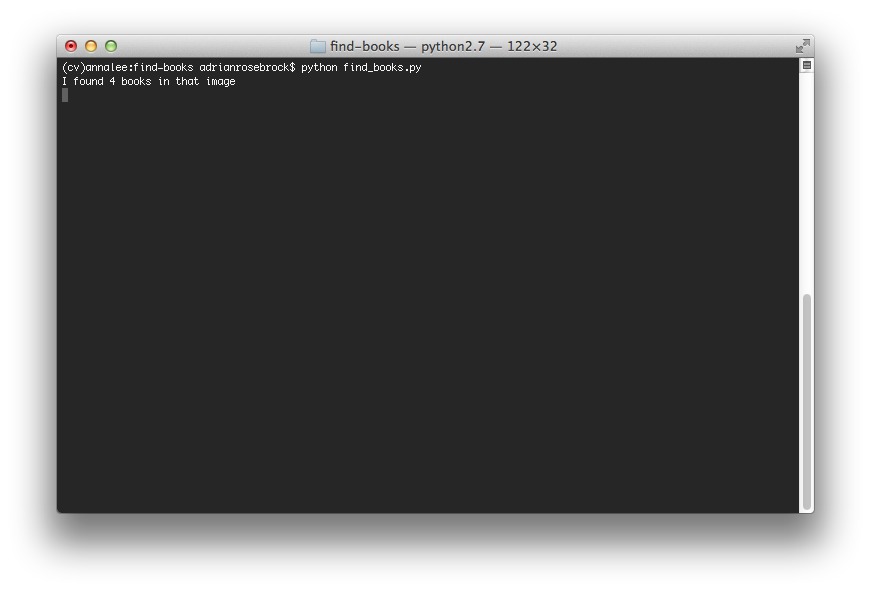
Что касается терминала, то он нам покажет, что мы успешно нашли 4 книги и проигнорировали посторонние предметы:
Делаем выводы
Итак, мы показали, как можно найти книги на фотографиях с помощью простых методов обработки изображений, а также компьютерного зрения, Python и OpenCV.
Кратко перескажем суть подхода:
1. Загружаем изображение с диска, преобразуем его в оттенки серого.
2. Немного размываем изображение.
3. Применяем детектор контуров Canny с целью обнаружения объектов на изображении.
4. Закрываем промежутки в контурах.
5. Находим контуры объектов на изображении.
6. Применяем контурную аппроксимацию для определения, был ли контур прямоугольником и, соответственно, книгой.По материалам статьи «A guide to finding books in images using Python and OpenCV».


Начинаю серию уроков (мини-курс) о распознавании изображений и обнаружении объектов.
В первой части краткое объяснение понятий распознавание изображений с использованием традиционных методов компьютерного зрения. Я называю методы, не основанные на глубоком обучении, традиционными методами компьютерного зрения, потому что они быстро заменяются методами, основанными на глубоком обучении. Тем не менее, традиционные подходы к компьютерному зрению используются по-прежнему во многих приложениях. Многие из этих алгоритмов также доступны в библиотеках компьютерного зрения, таких как OpenCVએ, и очень хорошо работают «из коробки».
Мини-курс, который я пишу, будет состоять из 8 уроков по приблизительно следующей тематике:
- Распознавание изображений с использованием традиционных методов компьютерного зрения
- Гистограмма направленных градиентов
- Пример кода для распознавания изображений
- Обучение лучшему детектору глаза
- Обнаружение объектов с использованием традиционных методов компьютерного зрения
- Как обучить и протестировать собственный детектор объектов OpenCV
- Распознавание изображений с использованием глубокого обучения
- Введение в нейронные сети
- Понимание нейронных сетей с прямой связью
- Распознавание изображений с использованием сверточных нейронных сетей
- Обнаружение объектов с использованием глубокого обучения
Краткая история распознавания изображений и обнаружения объектов
Наша история начинается в 2001 году; В этом году Пол Виола и Майкл Джонс изобрели эффективный алгоритм распознавания лиц. Их демонстрация, показывающая, что лица обнаруживаются в реальном времени на веб-камере, была самой ошеломляющей демонстрацией компьютерного зрения и его потенциала на то время. Скоро, алгоритм был реализован в OpenCVએ, и метод Виолы — Джонсаએ стал синонимом обнаружение лиц.
Каждые несколько лет появляется новая идея, которая заставляет людей делать паузу и принимать к сведению. В области обнаружения объектов эта идея появилась в 2005 году в статье Навнит Далала и Билла Триггса. Их дескриптор функции, гистограмма направленных градиентовએ (HOG), значительно превзошел существующие алгоритмы обнаружения пешеходов.
Примерно каждые десять лет появляется новая идея, настолько эффективная и мощная, что вы отказываетесь от всего, что было до нее, и всем сердцем принимаете новое. Глубокое обучениеએ — идея этого десятилетия. Алгоритмы глубокого обучения существуют уже давно, но они стали мейнстримом в компьютерном зрении благодаря его оглушительному успеху на конкурсе ImageNet Large Scale Visual Recognition Challenge (ILSVRC) 2012 года. В этом конкурсе алгоритм, основанный на глубоком обучении Алекса Крижевского, Ильи Суцкевер,и Джеффри Хинтон потрясли мир компьютерного зрения с поразительной точностью 85% — на 11% лучше, чем алгоритм, занявший второе место! В ILSVRC 2012 это была единственная запись, основанная на глубоком обучении. В 2013, все победившие работы были основаны на глубоком обучении, и в 2015 году несколько алгоритмов под общим названием Свёрточная нейронная сетьએ (CNN) превзошли уровень естественного распознавания человеком 95%.

При таком огромном успехе в распознавании изображений обнаружение объектов на основе глубокого обучения было неизбежным. Такие методы, как Faster R-CNN, производят челюсти. Отбрасывание результатов по нескольким классам объектов. Мы узнаем об этом в следующих публикациях, но пока имейте в виду, что если вы не изучили алгоритмы распознавания изображений и обнаружения объектов на основе глубокого обучения для своих приложений, вы можете упустить огромную возможность получить лучшие результаты.
Теперь готовы вернуться к основной цели этого поста — разобраться в распознавании изображений с помощью традиционных методов компьютерного зрения.
Распознавание изображений (также известное как классификация изображений)
Алгоритм распознавания изображений (также известный как классификатор изображений) принимает изображение (или фрагмент изображения) в качестве входных данных и выводит то, что содержит изображение. Другими словами, вывод — это метка класса (например, «кошка», «собака», «таблица» и т.д.). Как алгоритм распознавания изображений узнает содержимое изображения? Хорошо, вам нужно обучить алгоритм, чтобы узнать различия между разными классами. Если вы хотите найти кошек на изображениях, вам необходимо обучить алгоритм распознавания изображений с тысячами изображений кошек и тысячами изображений фона, которые не содержат кошек. Разумеется, подобный алгоритм может понимать только те объекты/классы, которые он знает.
Чтобы упростить задачу, в этом посте мы сосредоточимся только на двухклассовых (бинарных) классификаторах. Вы можете подумать, что это очень ограничивающее предположение, но имейте в виду, что многие популярные детекторы объектов (например, детектор лиц и детектор пешеходов) имеют под капотом бинарный классификатор. Например, внутри детектора лиц находится классификатор изображений, который сообщает, является ли участок изображения лицом или фоном.
Анатомия классификатора изображений
На следующей диаграмме показаны этапы работы традиционного классификатора изображений.

Интересно, что многие традиционные алгоритмы классификации изображений компьютерного зрения следуют этому конвейеру, в то время как алгоритмы, основанные на глубоком обучении, полностью обходят этап извлечения признаков. Давайте рассмотрим эти шаги более подробно.
Шаг 1: предварительная обработка
Часто входное изображение предварительно обрабатывается для нормализации эффектов контрастности и яркости. Очень распространенный этап предварительной обработки — вычесть среднее значение интенсивности изображения и разделить его на стандартное отклонение. Иногда гамма-коррекция дает немного лучшие результаты. При работе с цветными изображениями преобразование цветового пространства (например, цветовое пространство RGB в LAB) может помочь получить лучшие результаты.
Обратите внимание, что я не прописываю, какие шаги предварительной обработки являются хорошими. Причина в том, что никто заранее не знает, какой из этих шагов предварительной обработки даст хорошие результаты. Вы пробуете несколько разных, и некоторые из них могут дать немного лучшие результаты. Вот абзац из Далала и Триггса
Мы оценили несколько представлений входных пикселей, включая цветовые пространства в оттенках серого, RGB и LAB, опционально со степенным (гамма) выравниванием. Эти нормализации имеют лишь умеренное влияние на производительность, возможно, потому, что последующая нормализация дескриптора дает аналогичные результаты. Мы используем информацию о цвете, когда она доступна. Цветовые пространства RGB и LAB дают сравнимые результаты, но ограничение оттенками серого снижает производительность на 1,5% при 10–4 кадрах в секунду. Гамма-сжатие с квадратным корнем для каждого цветового канала улучшает производительность при низких значениях FPPW (на 1% при 10–4 кадрах в секунду), но логарифмическое сжатие слишком велико и ухудшает его на 2% при 10–4 кадрах в секунду.
Как вы видете, авторы не знали заранее, какую предварительную обработку использовать. Они делали разумные предположения и использовали метод проб и ошибок.
В рамках предварительной обработки входное изображение или фрагмент изображения также обрезаются и изменяются до фиксированного размера. Это важно, потому что следующий шаг, извлечение признаков, выполняется на изображении фиксированного размера.
Шаг 2: извлечение признаков
Входное изображение содержит слишком много дополнительной информации, которая не нужна для классификации. Следовательно, первым шагом в классификации изображений является упрощение изображения путем извлечения важной информации, содержащейся в изображении, и исключения остальной части. Например, если вы хотите найти на изображениях пуговицы рубашек и пальто, то заметите значительные различия в значениях пикселей RGB. Однако, запустив детектор краев изображения, можно упростить изображение. Вы все еще можете легко различить круглую форму кнопок на этих изображениях краев, и поэтому мы можем сделать вывод, что обнаружение краев сохраняет важную информацию, отбрасывая несущественную информацию. Этот шаг называется извлечением признаков. В традиционных подходах к компьютерному зрению разработка этих функций имеет решающее значение для производительности алгоритма. Оказывается, мы можем сделать намного лучше, чем простое обнаружение краев, и найти функции, которые намного надежнее. В нашем примере с пуговицами рубашки и пальто, хороший детектор функций будет не только фиксировать круглую форму кнопок, но и информацию о том, чем кнопки отличаются от других круглых объектов, таких как автомобильные шины.
Некоторыми хорошо известными функциями, используемыми в компьютерном зрении, являются функции типа Хаара, представленные Виолой и Джонсом, гистограмма направленных градиентов (HOG), Масштабно-инвариантная трансформация признаковએ Scale-Invariant Feature Transform (SIFT), ускорение надежного элемента Speeded Up Robust Feature (SURF) и т.д.
В качестве конкретного примера давайте посмотрим на извлечение признаков с помощью гистограммы ориентированных градиентов (HOG).
Histogram of Oriented Gradients (HOG) или гистограмма направленного градиента
Алгоритм извлечения признаков преобразует изображение фиксированного размера в вектор признаков фиксированного размера. В случае обнаружения пешеходов дескриптор объекта HOG вычисляется для фрагмента изображения размером 64 times 128 и возвращает вектор размером 3780. Обратите внимание, что исходный размер этого фрагмента изображения был 64 times 128 times 3 = 24,576, который сокращен до 3780 дескриптором HOG.
HOG основан на идее, что внешний вид локального объекта может быть эффективно описан распределением (гистограммой) направлений краев (направленных градиентов). Шаги по вычислению дескриптора HOG для изображения размером 64 × 128 перечислены ниже.
Расчет градиента: вычисление градиентов x и y изображений и, исходя из исходного изображения. Это можно сделать, отфильтровав исходное изображение следующими ядрами.
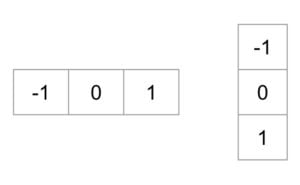
-
Используя изображения градиента и, можно вычислить величины g_x и g_y направления градиента, используя следующие уравнения:
g = sqrt{g_x^2 + g_y^2}
theta = arctan{dfrac{g_x}{g_y}}
Вычисленные градиенты «беззнаковые» и, следовательно, лежат в диапазоне от 0 до 180 градусов.
- Ячейки: разделите изображение на ячейки размером 8 times 8.
- Вычисление гистограммы градиентов в этих ячейках 8 times 8: для каждого пикселя в ячейке 8 times 8 мы знаем градиент (величину и направление), и, следовательно, у нас есть 64 величины и 64 направления, то есть 128 чисел. Гистограмма этих градиентов даст более удобное и компактное представление. Затем мы преобразуем эти 128 чисел в 9‑биновую гистограмма (т.е. 9 чисел). Бины гистограммы соответствуют направлениям градиентов 0, 20, 40… 160 градусов. Каждый пиксель голосует за одну или две ячейки гистограммы. Если направление градиента в пикселе равно 0, 20, 40… или 160 градусам, голос, равный величине градиента, передается пикселем в ячейку. Пиксель, у которого направление градиента не совсем 0, 20, 40… 160 градусов, разделяет свой голос между двумя ближайшими ячейками в зависимости от расстояния от ячейки. Например. Пиксель с величиной градиента 2 и углом 20 градусов будет голосовать за вторую ячейку со значением 2. С другой стороны,пиксель с градиентом 2 и углом 30 будет голосовать за 1 как за второй интервал (соответствующий углу 20), так и за третий интервал (соответствующий углу 40).
- Нормализация блока: гистограмма, вычисленная на предыдущем шаге, не очень устойчива к изменениям освещения. Умножение интенсивности изображения на постоянный коэффициент также масштабирует значения бина гистограммы. Чтобы противостоять этим эффектам, мы можем нормализовать гистограмму, т.е. представить гистограмму как вектор из 9 элементов, разделив каждый элемент на величину этого вектора. В исходной статье HOG эта нормализация выполняется не по ячейке 8 times 8, которая произвела гистограмму, а по блокам 16 times 16. Идея та же самая, но теперь вместо вектора из 9 элементов у вас есть вектор из 36 элементов.
- Вектор признаков: на предыдущих шагах мы выяснили, как вычислить гистограмму по ячейке 8 times 8, а затем нормализовать ее по блоку 16 times 16. Чтобы вычислить окончательный вектор признаков для всего изображения, блок 16 times 16 перемещается с шагом 8 (т.е. 50% перекрытие с предыдущим блоком), и 36 чисел (соответствующих 4 гистограммам в блоке 16 times 16), вычисленные на каждом шаге, объединяются для получения окончательного вектора признаков. Какова длина последнего вектора?
Входное изображение имеет размер 64 times 128 пикселей, и мы перемещаем 8 пикселей за раз. Следовательно, мы можем сделать 7 шагов в горизонтальном направлении и 15 шагов в вертикальном направлении, что в сумме составляет 7 times 15 = 105 шагов. На каждом шаге мы вычисляли 36 чисел, что составляет длину конечного вектора 105 times 36 = 3:780.
Шаг 3: алгоритм классификации (подробнее)
В предыдущем разделе мы узнали, как преобразовать изображение в вектор признаков. В этом разделе мы узнаем, как алгоритм классификации принимает этот вектор признаков в качестве входных данных и выводит метку класса (например, кошка или фон).
Прежде чем алгоритм классификации сможет творить чудеса, нам нужно обучить его, показывая тысячи примеров кошек и фонов. Различные алгоритмы обучения работают по‑разному, но общий принцип заключается в том, что алгоритмы обучения рассматривают векторы признаков как точки в пространстве более высоких измерений, и попытайтесь найти плоскости/поверхности, которые разделяют пространство более высоких измерений таким образом, что все примеры, принадлежащие к тому же классу, находятся на одной стороне плоскости/поверхности.
Чтобы упростить задачу, давайте более подробно рассмотрим один алгоритм обучения, который называется Support Vector Machines (SVM) или метод опорных векторовએ. Как работает метод опорных векторов (SVM) для классификации изображений?
Метод опорных векторов — один из самых популярных алгоритмов контролируемой двоичной классификации. Хотя идеи, используемые в SVM, существуют с 1963 года, текущая версия была предложена в 1995 году Кортесом и Вапником.
На предыдущем шаге мы узнали, что дескриптор HOG изображения является вектором признаков длиной 3 780. Мы можем думать об этом векторе как о точке в 3 780-мерном пространстве. Визуализировать пространство большого измерения невозможно, поэтому немного упростим ситуацию и представим, что вектор признаков был двухмерным.
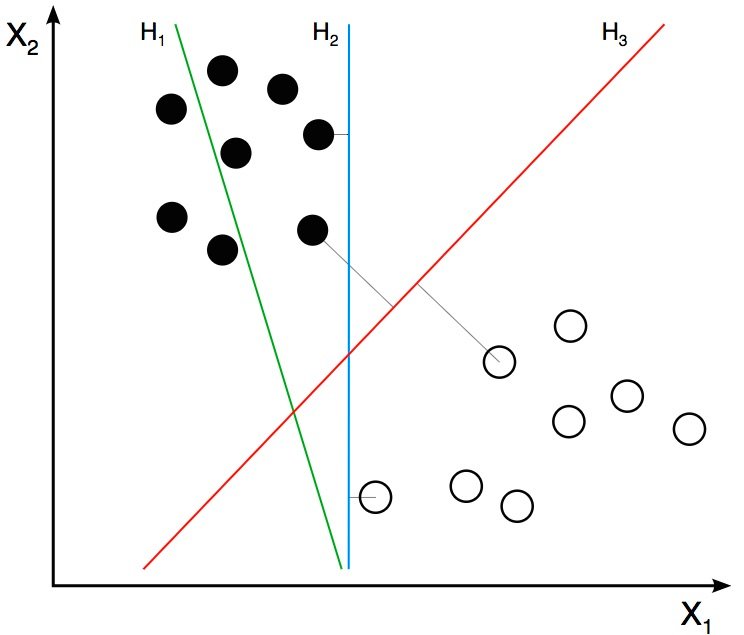
В нашем упрощенном мире теперь у нас есть 2D-точки, представляющие два класса (например, кошки и фон). На изображении выше два класса представлены двумя разными типами точек. Все черные точки принадлежат одному классу, а белые точки — другому классу. Во время тренировки мы предоставляем алгоритм с множеством примеров из двух классов. Другими словами, мы сообщаем алгоритму координаты двумерных точек, а также то, какая точка — черная или белая.
Различные алгоритмы обучения выясняют, как по-разному разделить эти два класса. Линейная SVM пытается найти лучшую линию, разделяющую два класса. На рисунке выше H1, H2 и H3 — это три линии в этом двухмерном пространстве. H1 не разделяет два класса и поэтому не является хорошим классификатором. H2 и H3 разделяют два класса, но интуитивно кажется, что H3 — лучший классификатор, чем H2, потому что H3, кажется, разделяет два класса более четко. Почему? Потому что H2 находится слишком близко к некоторым черным и белым точкам. С другой стороны, H3 выбирается таким образом, чтобы он находился на максимальном расстоянии от членов двух классов.
Учитывая 2D-функции на рисунке выше, SVM найдет для вас линию H3. Если вы получите новый двумерный вектор признаков, соответствующий изображению, которого алгоритм никогда раньше не видел, то можете просто проверить, на какой стороне линии лежит точка, и присвоить ей соответствующую метку класса. Если ваши векторы признаков находятся в 3D, SVM найдет подходящую плоскость, которая максимально разделяет два класса. Как вы, возможно, догадались, если ваш вектор признаков находится в 3 780‑мерном пространстве, SVM найдет соответствующую гиперплоскость.
Оптимизация SVM
Пока все хорошо, но я знаю, что у вас есть один важный вопрос, на который нет ответа. Что, если объекты, принадлежащие двум классам, нельзя разделить с помощью гиперплоскости? В таких случаях, SVM по-прежнему находит лучшую гиперплоскость, решая задачу оптимизации, которая пытается увеличить расстояние гиперплоскости от двух классов, одновременно пытаясь обеспечить правильную классификацию многих обучающих примеров. Этот компромисс контролируется параметром C. Когда значение C мало, выбирается гиперплоскость с большим запасом за счет большего числа ошибочных классификаций. И наоборот, когда C велико, выбирается гиперплоскость меньшего поля, которая пытается правильно классифицировать гораздо больше примеров.
Теперь вы можете быть сбиты с толку, какое значение выбрать для C. Выберите то значение, которое лучше всего работает на тестовом наборе, которого не было в обучающей выборке.
Image Recognition and Object Detection: Part 1

Вам встречались где-нибудь на просторах интернета картинки, на которых предлагается найти предмет? И вот вы уже сидите и ищете среди предметов необходимый! Наверное, каждому пользователю сети знакома такая ситуация!
В этой статье мы решили собрать интересные картинки для любителей поломать голову. Увлекательное занятие помогает развивать наблюдательность, сообразительность и тренировать мозг.
Эта подборка предназначена для самых лучших следопытов!
1Найди книгу среди гаджетов
2Найди фишку из казино среди тыкв
3Найди карандаш среди книг


4Найди балетную пачку среди арбузов




Приходилось ли вам подолгу вспоминать, как называется предмет, расположенный перед вами? Или может быть вы часто имеете дело с необычными объектами, о которых хотели бы узнать больше. Но не знаете, как он называется. В таком случае помогут приложения и онлайн сервисы определить название разных предметов по фотографии.
Содержание
- Как узнать предмет на фотографии через Яндекс.Картинки
- Как определить предмет по картинке в Гугл
- Каким образом определить предмет через Google Lens
- CamFind — приложение, которое поможет найти вещь по фото
- Использование интернет-магазинов для определения предмета по фотографии
- Видео-инструкция
Как узнать предмет на фотографии через Яндекс.Картинки
Помимо того, что компания Яндекс постоянно создаёт новые сервисы и приложения, она также развивает и улучшает существующие. Сегодня Яндекс Картинки — это не только огромный архив с изображениями, но и полноценный поисковик. Который за несколько секунд расскажет вам всё о предмете на фото, предоставленное ему. Кроме поисковой системы Гугл у данного сервиса нет аналогов, которые бы могли сравниться с ним по качеству поиска. Но далеко не все пользователи успели ознакомиться с ним.
Каким образом пользоваться приложением, чтобы определить предмет по картинке:
- Понадобится само изображение с предметом. Сделайте снимок на телефон, если его ещё нет в памяти;
- Откройте приложение Яндекс на смартфоне. Можно использовать как сайт, так и отдельную программу — на ваше усмотрение;
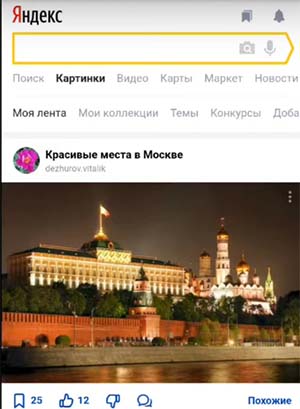
- Выбираем в меню поисковика раздел «Картинки».
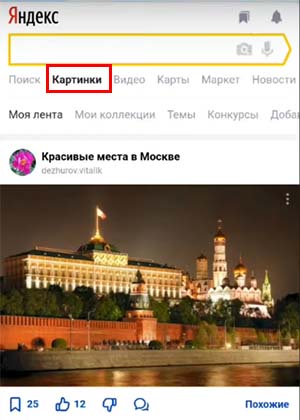 Если его нет или вы используете Яндекс Браузер, то этот раздел можно найти в меню. Нажмите на кнопку с тремя точками и выберите «Спросить картинкой»;
Если его нет или вы используете Яндекс Браузер, то этот раздел можно найти в меню. Нажмите на кнопку с тремя точками и выберите «Спросить картинкой»; 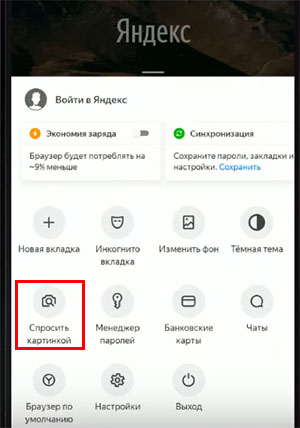
Выберите пункт «Спросить картинкой» - Откроется интерфейс камеры для того, чтобы сделать фото предмета в реальном времени. Чтобы выбрать готовую картинку из памяти, нажмите на иконку справа;
- Если приложение с голосовым помощником Алиса, она предложит несколько вариантов дальнейших действий. Выберите пункт «Похожие картинки» или «Поиск по картинке»;
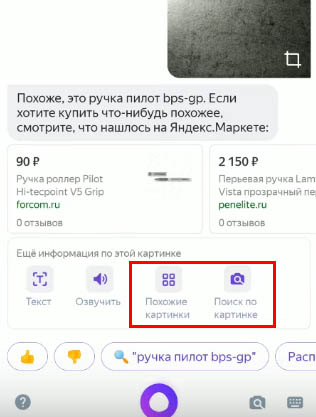
Выберите подходящий пункт в меню приложения - В следующем окне появится похожие картинки, а также сайты, на которых расположена её копия.
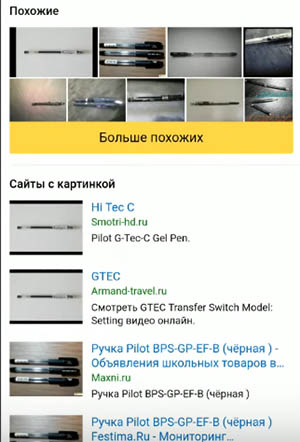
Выбрав один из результатов поиска можно определить название предмета, который вы сфотографировали или предоставили на фото из галереи. Выберите несколько сайтов или изображений, если информации о нём недостаточно. Этот тип поиска можно найти в мобильном приложении Яндекс, в браузере Яндекс поиска, в веб-версии поисковой системы.
Это может быть полезным: Определить растение по фото онлайн.
Как определить предмет по картинке в Гугл
Часто пользователи ищут одежду, имена актёров, название растений в Интернете. Для этого используются разные способы: форумы, сервисы с вопросами и ответами и прочие. В некоторых случаях на них не удаётся найти то, что вы ищите. Поисковая система Google имеет значительно больше изображений и способна определить любой объект на фотографии.
Для поиска можно воспользоваться мобильной версией браузера Google Chrome или приложением Google, которое установлено по умолчанию во всех смартфонах Android:
- Для поиска запустите браузер Хром на телефоне и перейдите на главную страницу поисковой системы Гугл;
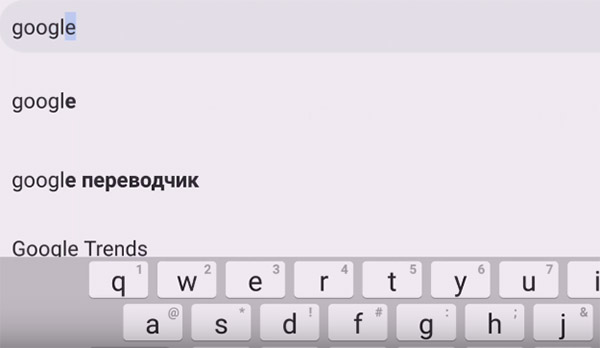
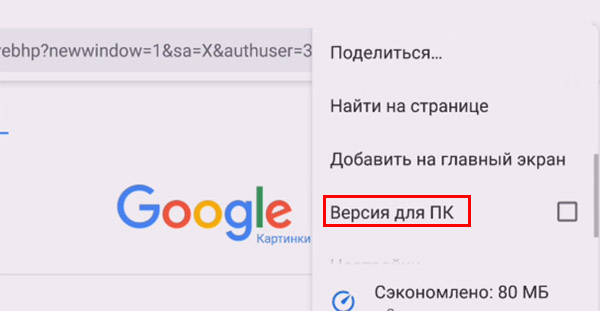
- Нажмите на кнопку меню. Она находится вверху справа;
- В выпадающем меню выберите пункт «Версия для ПК»;
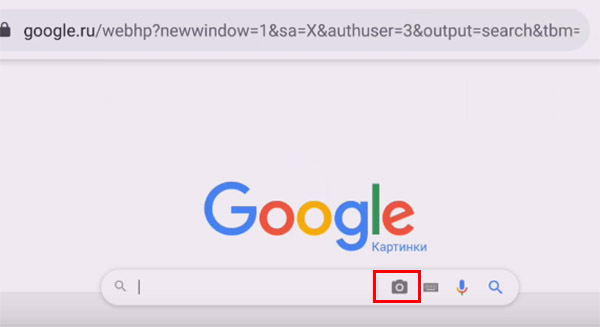
- После этих действий в строке появится кнопка в виде фотоаппарата. Она нам как раз и нужна — нажмите на неё;
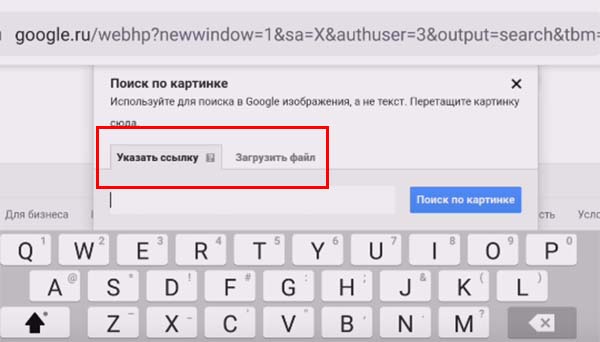
- Появится возможность загрузить фото предмета, который нужно определить, из галереи вашего смартфона. Для этого нужно нажать на кнопку «Выбрать файл». Или нажмите на «Указать ссылку» и вставьте её в строку;
- Появляется возможность создать фотографию тут же, используя камеру мобильного телефона;
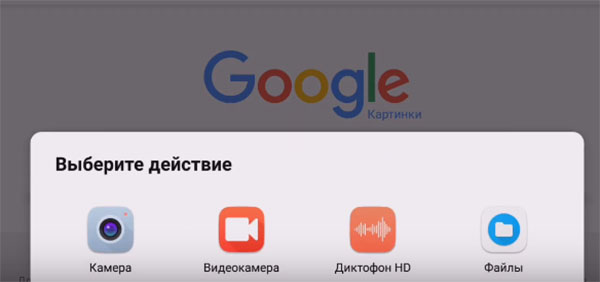
Фотографию можно создать, выбрав подходящий вариант в меню - Поисковик попытается отыскать похожие на изображении предметы, и вы сможете определить, что это.
Найти название объекта поможет описание его на сайте. Иногда свои изображения фотографы описывают в самом файле. Чтобы посмотреть метаданные изображения, его можно открыть в Фотошопе, выбрать пункт «Файл» и нажать на «Сведения о файле». Или попытаться посмотреть их в информации об изображении в смартфоне. Если не удалось этого сделать, смотрите другие приложения, о которых мы расскажем далее.
Каким образом определить предмет через Google Lens
Английское слово «Lens» переводится на русский язык как «Объектив». И это действительно лучшее название для приложения Google Lens на Андроид.

Потому как оно работает в режиме онлайн и быстро находит или рассказывает о предмете, который попадает в объектив вашей камере. На данный момент его можно назвать одним из самых лучших инструментов для поиска похожих картинок.
В нём ещё есть другие не менее полезные функции и особенности:
Управлять им несложно, при запуске вам сразу же будет предоставлена возможность создать снимок.
- По умолчанию Гугл Ленс запускает камеру, чтобы начать работать.
- Во время съёмки пользователь может приближать объект в камере, отдалять его, выделять маркером текст, которые предполагается перевести.
- Чтобы помочь приложению сделать качественную расшифровку предмета, выберите в меню подходящий раздел из списка: еда, текст, товары, документы, места.

Сразу же под снимком появятся готовые результаты того, что вы ищите. Если вы находитесь в тёмном помещении, нажмите на иконку с молнией, чтобы включить подсветку (если она доступна на телефоне). А для того, чтобы совершить поиск по готовой картинке из галереи, нажмите на кнопку вверху возле меню.
Читайте также: Программа распознавания лиц по фото онлайн.
CamFind — приложение, которое поможет найти вещь по фото
Мобильное приложение CamFind доступно для платформ Android и IOS. Оно было создано несколько лет назад и обрело успех у пользователей, когда ещё не было такого разнообразия программ для подобных задач. CamFind легко определяет текст, QR коды, достопримечательности, ресторанные блюда и многое другое.

А его функции позволяют вводить информацию разными способами, включая голосовой ввод. В приложении можно находить одежду и покупать её.
Это своеобразная социальная сеть для тех, кто часто делает фотографии, любит создавать изображения и делиться ими с другими. В коллекциях фото каждый может видеть файлы, созданные другими пользователями и оценивать их звёздочкой или сердечком.
Есть в приложении и собственная лента новостей, где отображаются важные события и интересные файлы. Здесь можно не только найти любой предмет, но и узнать его цену. Или сравнить стоимость в разных онлайн-магазинах.
Это интересно: переводчик с фотографии онлайн.
Использование интернет-магазинов для определения предмета по фотографии
Часто в Интернет пользователи заглядывают, чтобы найти для себя подходящую одежду. Иногда бывает непросто найти то, что действительно подойдёт. Но стоит увидеть какую-нибудь вещь на человеке в сети, и мы сразу же понимаем, что хотим такую же. Теперь возникает вопрос, как узнать, что это за бренд? На помощь может прийти приложение Lamoda для IOS и Андроид. Подробная инструкция по поиску одежды.
Оно создано владельцами крупнейшего онлайн-магазина одежды в России и СНГ. И позволяет быстро искать наряд по изображению.
Попробуйте открыть его, найти в меню поиск по картинке и отыскать вещь, которую вы хотите купить. Поиск работает отлично и находит то, что вы ищите. Или предлагает альтернативный варианты. Если не получилось найти, попробуйте поискать в определённом разделе магазина Ламода.
Видео-инструкция
Нужен наглядный пример того, как распознать любой предмет по его фото — тогда смотрите видео.
Подборка картинок, которые заставят вас применить всю свою внимательность. А если засекать время поиска, то можно придать этой затее соревновательный дух, попробуйте!
Кстати, в среднем, взрослый человек разыскивает скрытый предмет за 70 секунд, а ребёнок всего за 20!
1. Найдите четырёхлистный клевер. Он принесёт удачу в дальнейшем поиске.

Ну как, получилось? Поехали дальше.
2. Найдите картошку.

3. Задача немного посложнее, найдите маленький корнишон среди всего многообразия еды.

4. Найдите медведя.

5. Где-то в толпе этих милейших Санта-Клаусов спряталась овечка. Самое время её отыскать.

6. Пингвин-шпион притаился на этой картинке, видите его?

7. На этой картинке вам нужно обнаружить собаку.

8. Панда ждёт, пока вы её обнаружите.

9. Для особо романтичных особ. Найдите спрятанное сердечко.

10. А на этом изображении спряталась игорная фишка.

