Истинный курс, истинный пеленг, курсовой угол

Рис. 3.6.
Истинный курс судна
Направление
движения судна характеризуется его
истинным курсом.
Покажем
это на рис. 3.6. для чего:
-
проведем
северную часть истинного меридиана
наблюдателя, находящегося на судне С
→ С-NИ; -
продолжим носовую
часть продольной оси симметрии судна
→ С-К, тогда:
–
истинный курс
судна естьничто иное, какнаправление продольной оси судна,
измеряемое горизонтальным углом между
северной частью истинного меридиана и
носовой частью продольной оси судна.
Истинный
курс судна измеряется в круговой системе
счета направлений от 0° до 360°(по
часовой стрелке) и обозначается – какИК.
Направление
на объект наблюдения определяется или
относительно носовой части продольной
оси судна (курсовой угол), или
относительно северной части истинного
меридиана наблюдателя (истинный
пеленг).
Истинным
пеленгом называется горизонтальный
угол в плоскости истинного горизонта
наблюдателя между северной частью
истинного меридиана наблюдателя и
направлением из точки наблюдения на
объект(рис. 3.7.).

Рис.
3.7. Истинный пеленг на ориентир
Истинный
пеленг, также как и истинный курс,
измеряется в круговой системе счета
направлений от 0° до 360°по часовой
стрелке и обозначается какИП.
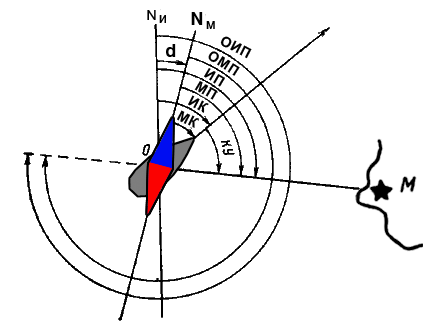
Обратный
истинный пеленг(ОИП) – это
направление, отличающееся от истинного
пеленга на 180°.
Если
ИП на маяк95°, то ОИП (с маяка на судно) 275° (рис.
3.7.).
|
ОИП |
Курсовым
углом называется горизонтальный
угол в плоскости истинного горизонта
наблюдателя между носовой частью
продольной оси судна (ДП судна) и
направлением из точки наблюдения на
объект (ориентир).
Курсовой
угол измеряется в полукруговой системе
счета направлений от 0° до 180° левого
(л/б) и правого (пр/б) бортов (рис.
3.8).
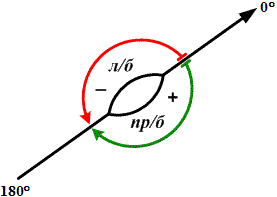
Рис.
3.8. Курсовой угол
Курсовой
угол обозначается – как КУилиq.
При
вычислениях курсовому углу правого
борта (КУ пр/б) придается знак «+», а
курсовому углу левого борта (КУ л/б) –
знак «–».
Курсовые
углы, равные 90° (90° пр/б, 90° л/б) получили
название «траверзных»
курсовых углов.
Курсовые
углы, равные 45° (45° пр/б, 45° л/б) –
«крамбола».
Курсовые
углы, равные 135° (135° пр/б, 135° л/б) –
«раковина»
или «подзор».
Все
истинные направления (ИК, ИП, КУ) связаны
между собой соотношениями, которые
легко установить из рис. 3.9.

Рис.
3.9. Истинные направления
|
ИП |
|
ИК |
|
КУ |
Формулы
алгебраические.
При
решении задач по данным формулам
необходимо знать, что:
-
Еслипри вычислениях ИК или ИП получаетсярезультат более 360°, то из полученного
результата необходимо вычесть 360°.Например:
ИК
= 270°, КУ = 130° пр/б, ИП = ?
ИП = ИК + КУ =
270° + 130° = 400° – 360° = 40°Ответ:
ИП
= 40°. -
Еслипри вычислениях ИК или ИП получитсяотрицательный результат, необходимок полученному результату прибавить
360°.Например:
ИК
= 40°, КУ = 70° л/б, ИП = ?
ИП = ИК + КУ = 40°
+ (–70°) = 40° – 70° = –30° + 360° = 330°Ответ:
ИП
= 330°. -
Если при вычислениях
значение курсового угла (КУ) получается
более 180°, то необходимо полученный
результат отнять от 360°, а наименование
КУ изменить на противоположное.
-
Например:
ИП
= 340°, ИК = 40°, КУ = ?
КУ = ИП – ИК = 340° –
40° = 300° пр/б, 360° – 300° = 60° л/бОтвет:
КУ
= 60° л/б.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
ИСТИННЫЙ КУРС, ИСТИННЫЙ ПЕЛЕНГ И КУРСОВОЙ УГОЛ
Основные задачи навигации: определение направления движения судна и определение направлений на ориентиры, наблюдаемые с судна. Обычно направление движения судна определяется положением его диаметральной плоскости (ДП) относительно истинного меридиана.
Истинный курс (ИК) — угол в плоскости истинного горизонта, заключенный между нордовой (Nи) частью истинного меридиана и линией курса (рис. 9). Линия курса — линия пересечения диаметральной плоскости судна с плоскостью истинного горизонта.
Истинный курс судна измеряется углом в горизонтальной плоскости, отсчитываемым от линии истинного меридиана по часовой стрелке от 0° до 360°.
Истинный пеленг (ИП) —угол между плоскостью истинного меридиана и вертикальной плоскостью, проходящий через наблюдателя и ориентир. Линия пересечения вертикальной плоскости, проходящей через ориентир, с плоскостью истинного горизонта называется линией пеленга.
Истинный пеленг измеряется в горизонтальной плоскости от линии истинного меридиана до линии пеленга по часовой стрелке от 0° до 360°.
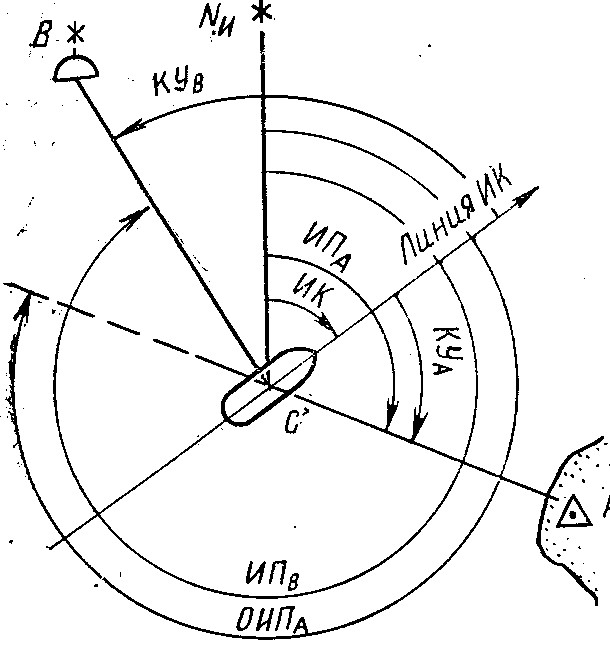
Рис. 9. Истинные направления:
С — судно; А в В — ориентиры; КУА и КУВ — соответственно курсовые углы на ориентиры А и В; ИПА и ИПВ — истинные пеленги соответственно на ориентиры А и В; ОИП — обратный истинный пеленг на ориентир А
____________________________
Угол, отличающийся от истинного пеленга на 180°, называется обратным истинным пеленгом (ОИП), т. е. ОИП=ИП±180°.
Курсовой угол (КУ) — угол, заключенный между диаметральной плоскостью судна и вертикальной плоскостью, проходящей через наблюдателя и ориентир. Курсовые углы отсчитываются от носовой части диаметральной плоскости (ДП) вправо и влево от 0° до 180°, и в зависимости от этого называются курсовыми углами правого (п/б) и левого (л/б) борта.
Если курсовой угол на ориентир составляет 90° правого или левого борта, то говорят, что ориентир находится на траверзе судна.
Условно курсовым углам правого борта приписывается знак плюс (+), а левого борта – знак минус (—).
В судовождении применяется также счет курсовых углов от носовой части диаметральной плоскости по часовой стрелке от 0° до 360°, в этом случае борт судна не указывают.
Зависимость между ИК, ИП и КУ выражается формулами:
ИП=ИК+КУ; КУ=ИП-ИК; ИК=ИП-КУ.
Указанные формулы алгебраические, и курсовой угол входит в них со своим знаком.
Тема 1.2. Определение направлений в море.
План лекции № 2-3
1. Системы счета направлений. Истинные направления.
2. Приборы для выработки и измерения направлений в море.
3. Магнитное поле Земли. Магнитные направления.
4. Магнитные компасы.
5. Магнитное поле судна. Девиация магнитного компаса. Компасные направления по МК.
6. Компасные направления по ГК.
7. Истинный курс, истинный пеленг, курсовой угол.
8. Определение поправок курсоуказателей.
Цель занятия:
Знать:
– определение направлений на картах;
– земной магнетизм и его влияние на магнитные компасы;
– приборы для выработки и измерения направлений в море.
Уметь:
– решать задачи на перевод и исправление курсов и пеленгов;
– определять поправки магнитного компаса;
– приводить магнитное склонение к году плавания;
-
Системы счета направлений. Истинные направления.
Основным условием безопасности плавания корабля является безошибочное определение направления движения судна относительно заданной линии пути и направлений на навигационные опасности.
Основой для определения направлений движения судна и на окружающие судно объекты являются главные направления: N, S, Е,W. Любое из этих главных направлений может быть принято за начало счета направлений.
В судовождении традиционно за начало счета направлений принимают или северную или южную часть линии истинного меридиана (полуденной линии). Определение направлений относительно полуденной линии производится по различным системам счета в зависимости от характера решаемых навигационных задач с точностью до 0,1′.
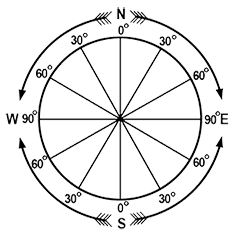
Для определения направления в плоскости истинного горизонта используются три системы деления горизонта: круговая, полукруговая и четвертная.
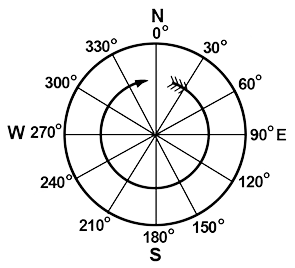
Круговая система счета направлений
В круговой системе за начало счета направлений принята северная (нордовая) часть линии истинного меридиана. В этой системе вся плоскость истинного горизонта разделена на 360°. Счет направлений ведется от северной части истинного меридиана по часовой стрелке от 0° до 360°. Отрицательных значений система не предусматривает.
Форма записи: 37,4°.
В навигации круговая система счета направлений является основной и применяется для определения направления движения судна, а также направлений на видимые с судна предметы.
В соответствии с этой системой на суднах разбиты шкалы всех курсоуказателей и приборов, служащих для определения направлений в море.
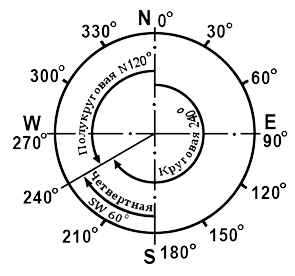
Полукруговая система счета направлений
В полукруговой системе плоскость истинного горизонта линией NS разделена на две части по 180° каждая. За начало счета направлений (0°) принимают как северную (N) часть, так и южную (S) часть линии истинного меридиана. Во всех случаях счет ведут к осту (Е) или весту (W) от 0° до 180°.
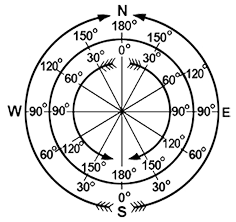
Четвертная система счета направлений
В четвертной системе плоскость истинного горизонта линиями NS и EW делится на четыре четверти: NE, SE, SW и NW.
За начало счета направлений (0°) принимают северную (N) или южную (S) часть истинного меридиана. Счет ведут от N или S в сторону Е или W от 0° до 90° в каждой четверти:
– в NE четверти от N к Е (по часовой стрелке) от 0° до 90°;
– в SE четверти от S к Е (против часовой стрелки) от 0° до 90°;
– в SW четверти от S к W (по часовой стрелке) от 0° до 90°;
– в NW четверти от N к W (против часовой стрелки) от 0° до 90°.
Для исключения многозначности при записи четвертных направлений указывают наименование четверти, в которой это направление расположено.
Например: NE70,1°; SW38,3°; NW76,9°; SE70,0°.
-
Приборы для выработки и измерения направлений в море.
Магнитный компас предназначен для определения направлений. По компасу назначается и удерживается курс судна, берутся пеленги на маяки и другие предметы, определяются курсовые углы, направление ветра и течения. Компас используется при плавании в море, крупных озерах и водохранилищах. Без компаса невозможно удерживать правильное направление движения судна во время плохой видимости (туман, снегопад и т.п.) и при потере видимости береговых ориентиров.
Любой магнитный компас действует на свойстве намагниченной стрелки, которая располагается осью в плоскости магнитного меридиана, причем один конец стрелки (нордовый) всегда обращен в сторону северного полюса.
Компас состоит из: котелка с картушкой; нактоуза (подставки под котелок); пеленгатора; средств для уничтожения девиации.
Гироскопический компас (гирокомпас) – компас, указывающий направления в море и работающий независимо от сил земного магнетизма и магнитного поля на судне.
Принцип действия гирокомпаса основан на использовании следующих свойств быстро вращающегося тела гироскопа:
1) ось быстро вращающегося ротора гироскопа сохраняет неизменным заданное в начальный момент направление;
2) под действием внешней силы, приложенной к гироскопу (подвешивается груз), главная ось поворачивается перпендикулярно к направлению действия силы, что и используется для превращения гироскопа в гирокомпас.
На работу гирокомпаса оказывают влияние скорость судна, маневрирование, качка, широта места и т.д. Часть этих погрешностей устраняется при помощи специальных устройств, часть учитывается поправкой гирокомпаса (ЛГК).
Работа (показания) гирокомпаса постоянно (особенно при каждом изменении курса) контролируется путем сличения курсов с магнитным компасом. В комплект гирокомпаса входят: основной компас; приборы управления, контроля и питания; приборы курсоуказания .
Гирокомпас имеет ряд преимуществ перед магнитным компасом: большая устойчивость на меридиане; отсутствие влияния на компас магнитного склонения ( d) и судовой девиации (8); возможность использовать в различных помещениях судна Дублирующих показания компаса приборов – репитеров; возможность вести непрерывную автоматическую запись курса судна во время плавания с помощью курсографа и использовать специальный прибор – авторулевой, который обеспечивает автоматическое управление рулевым приводом, удерживая судно на заданном курсе без участия рулевого.
Недостатки: сложность конструкции и потребность в электрическом токе.
3. Магнитное поле Земли. Магнитные направления.
Магнитное поле Земли характеризует вектор напряженности Т (полная сила земного магнетизма), который направлен по касательной к магнитным силовым линиям (рис. 1). В общем случае этот вектор составляет некоторый угол I с плоскостью истинного горизонта и не лежит в плоскости истинного меридиана.
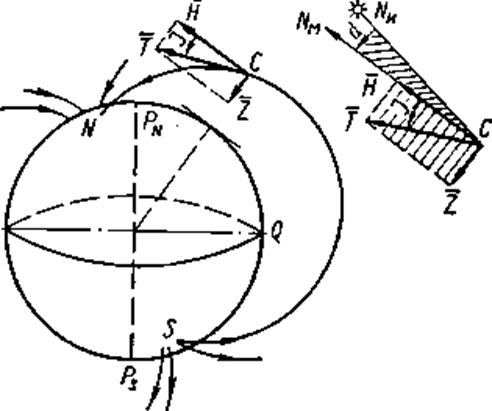
Рис.1. Элементы земного магнетизма
Вертикальная плоскость, проходящая через вектор напряженности магнитного поля Земли в данной точке, называется плоскостью магнитного меридиана. В этой плоскости устанавливается ось свободно подвешенной магнитной стрелки. След от пересечения плоскости магнитного меридиана плоскостью истинного горизонта называется магнитным меридианом.
Угол в плоскости истинного горизонта между истинным меридианом (полуденной линией N — S)и магнитным меридианом называется магнитным склонением (d). Склонение отсчитывается от северной части истинного меридиана к Е или W от 0 до 180°. Восточному (Е) склонению приписывают знак (+), а западному (W) — знак ( — ).
Угол между плоскостью истинного горизонта И вектором полной силы земного магнетизма называется магнитным наклонением (/). На магнитных полюсах наклонение максимально и равно 90°, а по мере удаления от полюсов уменьшается до нулю. Кривая на земной поверхности, образованная точками, в которых магнитное наклонение равно нулю, называется магнитным экватором.
Вектор напряженности магнитного поля Земли можно разложить на горизонтальную (Н) и вертикальную (Z) составляющие (см. рис. 9). Величины Т, Н, Z и I связаны соотношениями
![]()
Горизонтальная составляющая Н направлена по магнитному меридиану и удерживает в нем чувствительный элемент (стрелку, картушку) магнитного компаса. Как видно из формулы, максимальное значение Н принимает при I —0, т.е. на магнитном экваторе, и становится равным нулю на магнитных полюсах. Поэтому в близкополярных районах показания магнитного компаса не надежны, а на магнитных полюсах компас вообще не работает.
Величины d, I, H, Z называются элементами земного магнетизма. Из всех элементов наибольшее значение для судовождения имеет магнитное склонение. Распределение магнетизма на земной поверхности показывают на специальных картах элементов земного магнетизма. Кривыми линиями на карте соединены точки с одинаковыми значениями того или иного элемента. Линия, соединяющая точки с одинаковым значением склонения, называется изогоной. Изолиния нулевого склонения — агона разделяет районы с восточным и западным склонением. Величина магнитного склонения приводится также на морских навигационных картах.
Все элементы земного магнетизма подвержены изменениям по времени — вариациям. Вариации склоненияразличают вековые, суточные и апериодические.
Вековое изменение — это изменение среднегодовой величины склонения из года в год. Годовое изменение склонения (годовое увеличение или уменьшение) не превышает 15′ и показывается на морских картах. Суточныеили солнечносуточныевариации склонения имеют период, равный солнечным суткам, по величине незначительны и в судовождении не учитываются. Апериодические изменения или магнитные возмущенияпроисходят без определенного периода.
Магнитные возмущения большой интенсивности, когда в течение нескольких часов все элементы земного магнетизма резко изменяются, называются магнитными бурями. Возникновение магнитных бурь связано с солнечной активностью и наблюдается по всей земной поверхности. Показания компаса во время магнитных бурь ненадежны — склонение может изменяться на несколько десятков градусов.
Магнитные полюсы Земли располагаются сравнительно недалеко от географических, но с ними не совпадают. Кроме того, они постепенно изменяют свое положение.
Вертикальная плоскость, проходящая через ось свободно подвешенной магнитной стрелки, находящейся под действием только сил земного магнетизма, называется плоскостью магнитного меридиана, а линия от пересечения этой плоскости с плоскостью истинного горизонта – магнитным меридианом.
Горизонтальный угол, на который в данной точке Земли плоскость магнитного меридиана отклоняется от плоскости истинного меридиана, называется магнитным склонением d.
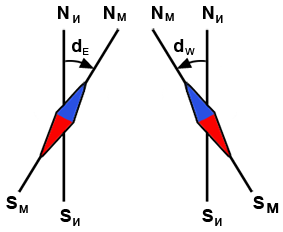
Оно отсчитывается от северной части истинного меридиана Nи к Е или к W от 0 до 180°. Если северная часть магнитного меридиана Nм отклонена от Nи к востоку, то склонение имеет наименование Е (восточное) и ему приписывается знак плюс (+), если к западу, то W (западное) со знаком “минус” (–).
В отдельных точках Земли магнитное склонение отличается как по значению, так и по наименованию. В большей части судоходных районов склонение не превышает 25°Е или W. Исключением являются высокие широты, где склонение может достигнуть десятков градусов, а между одноименными магнитными и географическими полюсами даже 180°.
Чтобы правильно использовать магнитный компас, необходимо знать значение магнитного склонения в районе плавания. С этой целью на навигационные карты наносят значение и наименование склонения. Однако наблюдениями установлено, что значение склонения не остается постоянным даже в одном и том же месте. В отдельных районах за год склонение может изменяться до 0,2–0,3°. Поэтому на навигационных картах указывают также год, к которому отнесено склонение, и значение его годового изменения.
Магнитным курсом (МК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до носовой части диаметральной плоскости судна.
Магнитным пеленгом (МП) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части магнитного меридиана по часовой стрелке до направления на ориентир.
Угол, отличающийся от МП на 180°, называется обратным магнитным пеленгом (ОМП): ОМП = МП ± 180° или МП = ОМП ± 180°.
Магнитные курсы и пеленги могут лежать в пределах от 0 до 360°.
Зная магнитное склонение в данном месте Земли, можно по известным магнитным направлениям получить истинные, а также решить обратную задачу.
Зависимость между магнитными и истинными направлениями выражается формулами:
ИК = МК + d; ИП = МП + d; ОИП = ОМП + d;
МК = ИК – d; МП = ИП – d; ОМП = ОИП – d.
4. Магнитные компасы.
Морские магнитные компасы — основные навигационные, приборы (несмотря на наличие гирокомпасов), которые служат для определения курса судна и направлений на береговые предметы и небесные светила. По компасу можно также определить приближенное направление ветра и дрейфа судна. Магнитные компасы просты по устройству и в то же время безотказны в работе. Они не связаны ни с источниками энергии, ни с какими-либо другими приборами, и к тому же их стоимость относительно небольшая. Все морские суда снабжаются магнитными компасами, независимо от наличия на них гирокомпасов.
Магнитный компас работает на основе свойства намагниченной стрелки располагаться своей осью вдоль магнитных силовых линий магнитного поля Земли; следовательно, стрелка компаса должна показывать направление магнитного меридиана в данной точке на поверхности Земли. В связи с тем что на магнитную стрелку компаса, установленного на судне, действуют магнитные поля Земли и судового железа, ось магнитной стрелки или линия NS картушки магнитного компаса располагается в плоскости компасного меридиана.
По назначению морские магнитные компасы делятся на главные и путевые.
Главный магнитный компас, как об этом говорит само название, является наиболее важным навигационным прибором, который обычно устанавливают на верхнем мостике в диаметральной плоскости судна в возможной удаленности от влияния судового железа, что обеспечивает наиболее оптимальные условия работы компаса. По главному компасу судоводитель назначает заданный курс, проверяет показания путевого компаса и гирокомпаса, пеленгует береговые объекты для определения места.
Путевой магнитный компас служит как указатель курса и, как правило, устанавливается в рулевой рубке перед рулевым.
В настоящее время все отечественные суда снабжаются 127-миллиметровым морским магнитным компасом. Он обладает достаточной точностью и надежностью показаний, прост в использовании, обслуживании и ремонте.. п.
5. Магнитное поле судна. Девиация магнитного компаса. Компасные направления по МК.
Линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось магнитной стрелки, находящейся под действием силы земного магнетизма и магнитных сил судового железа, называется компасным меридианом.
Находящиеся в магнитном поле Земли детали набора и другие стальные и железные части судна постепенно намагничиваются и приобретают свойства магнита. В результате этого в окружающем судно пространстве возникает собственное магнитное поле, действие которого складывается с магнитным полем Земли. Магнитная стрелка судового компаса устанавливается по равнодействующей сил обоих полей, вследствие чего отклоняется от направления магнитного меридиана.
Горизонтальный угол, на который плоскость компасного меридиана отклоняется от плоскости магнитного меридиана, называется девиацией магнитного компаса .
Девиация отсчитывается от северной части магнитного меридиана Nм к Е (со знаком “+”) или W (со знаком “–”) от 0 до 180°.
На каждом курсе девиация у судовых компасов различна. Это объясняется тем, что при изменении курса меняется положение судового железа относительно магнитных стрелок компаса. Кроме того, после поворота судна судовое железо частично перемагничивается, что также приводит к изменению магнитного поля судна.
Компасным курсом (КК) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до носовой части диаметральной плоскости судна.
Компасным пеленгом (КП) называется угол в плоскости истинного горизонта, отсчитываемый от нордовой части компасного меридиана по часовой стрелке до направления на ориентир.
Угол, отличающийся от КП на 180°, называется обратным компасным пеленгом ОКП: ОКП = КП ± 180° или КП = ОКП ± 180° Компасные курсы и пеленги могут быть в пределах от 0 до 360°.
Зависимость между компасными и магнитными направлениями:
МК = КК + ; МП = КП + ; ОМП = ОКП +
КК = МК – ; КП = МП – ; ОКП = ОМП – .
Между КК, КП и КУ ориентиров при круговом счете сохраняется следующая зависимость:
КП = КК + КУ;
КК = КП – КУ;
КУ = КП – КК.
ПОПРАВКА МАГНИТНОГО КОМПАСА.
Алгебраическая сумма девиации и магнитного склонения, на величину которой компасные направления отличаются от истинных, называется поправкой магнитного компаса:
ΔК = d +
Девиацию и склонение берут со своими знаками, а именно:
Если северный конец магнитной стрелки отклонен от истинного меридиана вправо (к востоку), то склонение и девиация называются восточными и считаются положительными, т.е. в формулы подставляются со знаком “+”.
Если же северный конец магнитной стрелки отклонен от истинного меридиана влево (к западу), то склонение и девиация называются западными и считаются отрицательными, т.е. в формулы подставляются со знаком “–”.
Задачи, связанные с переходом от компасных курсов и пеленгов к истинным, называются исправлением румбов, а задачи, связанные с переходом от снятых с карты истинных кусов и пеленгов к компасным – переводом румбов.
Формулы исправления румбов:
ИК = КК + d + или ИК = КК + ΔК
ИП = КП + d + или ИП = КП + ΔК
ОИП = ОКП + d + или ОИП = ОКП + ΔК
Формулы перевода румбов:
КК = ИК – d – или КК = ИК – ΔК
КП = ИП – d – или КП = ИП – ΔК
ОКП = ОИП – – d или ОКП = ОИП – ΔК
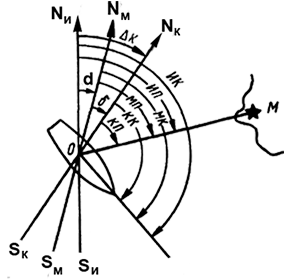
Условные обозначения, используемые в навигационных задачах
Nи – Истиный меридиан – линия пересечения вертикальной плоскости, проходящей через географические полюсы Земли и место наблюдателя, с поверхностью Земли.
Nм – Магнитный меридиан – линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось свободно подвешенной магнитной стрелки, находящейся под действием только силы земного магнетизма.
Nк – Компасный меридиан – линия пересечения плоскости истинного горизонта с вертикальной плоскостью, проходящей через ось магнитной стрелки, находящейся под действием силы земного магнетизма и магнитных сил судового железа.
КК – Компасный курс – угол между линией компасного меридиана Nк и линией курса.
КП – Компасный пеленг – угол между линией компасного меридиана Nк и линией пеленга.
МК – Магнитный курс – угол между магнитным меридианом Nм и линией курса.
МП – Магнитный пеленг – угол между линией магнитного меридиана Nм и линией пеленга.
ИК – Истинный курс – угол между линией истинного меридиана Nи и линией курса.
ИП – Истинный пеленг – угол между линией истинного меридиана и линией пеленга.
d – Девиация – угол между линией компасного меридиана Nк и линией магнитного меридиана Nм.
– Склонение – угол между линией магнитного меридиана Nм и линией истинного меридиана Nи.
ΔК – Поправка компаса – угол между линией истинного меридиана Nи и линией компасного меридиана Nк.
ПУ – Путевой угол – угол между линией истинного меридиана и линией, совпадающей с направлением курса судна
6. Компасные направления по ГК.
Главная ось работающего гирокомпаса всегда устанавливается в плоскости так называемого гироскопического или компасного меридиана. Угол между истинным и гироскопическим (или просто компасным) меридианами носит название поправки гироскопического компаса.
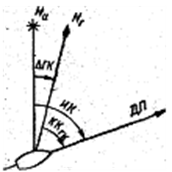
В случаях, когда нордовая часть гироскопического меридиана отклонена от истинного меридиана к востоку, поправке гирокомпаса приписывается знак плюс, и наоборот, когда нордовая часть компасного меридиана отклонена от истинного к западу, поправка гирокомпаса имеет знак минус.
Рассмотрение рисунка позволяет при использовании гирокомпаса установить связь между истинными и компасными направлениями, выражающуюся формулами:
ИК = ККгк + ΔГК
ИП = КПгк + ΔГК
Поправка гироскопического компаса и ее знак определяются по формулам:
ΔГК = ИК – ККгк
ΔГК = ИП – КПгк
Поправка гирокомпаса, вообще говоря, состоит из двух составляющих — постоянной и переменной. Однако здесь мы не будем рассматривать ее составляющие и причины, порождающие их. Это изучается в теории гирокомпасов. Мы будем рассматривать лишь результат — отклонение оси гирокомпаса от плоскости истинного меридиана и считать этот угол поправкой гирокомпаса ΔГК, которой следует исправлять все измеренные направления, если нужно получить истинные.
7. Истинный курс, истинный пеленг, курсовой угол.
Для обеспечения безопасности плавания судна в море необходимо уметь определять направление его движения относительно заданного пути, а также направления на навигационные опасности и видимые с судна ориентиры.
Направления в море определяются относительно истинного меридиана (Nи) и называются истинными направлениями. Зная положение истинного меридиана любое направление на поверхности земли (моря) можно определить углом между нордовой частью этого меридиана и направлением на предмет. При этом величина этого угла измеряется в градусах по круговой системе, т.е. от 0° до 360°.
Направление движения судна определяется истинным курсом.
Истинным курсом (ИК) называется горизонтальный угол между северной частью истинного меридиана и диаметральной плоскостью судна по направлению его движения, измеренный по ходу часовой стрелки.
Диаметральная плоскость, пересекаясь с плоскостью истинного горизонта, образует линию курса судна. Таким образом, истинным курсом ИК является угол между северной частью истинного меридиана и линией курса. Отсчитывается истинный курс в круговой системе счета.
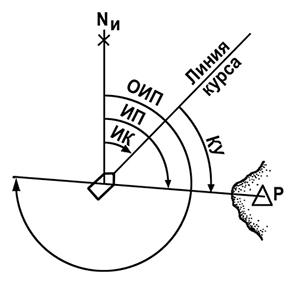
Направлением из точки наблюдения на объект называется линией пеленга.
Направление с судна на естественные и искусственные объекты определяется истинным пеленгом.
Истинным пеленгом (ИП) называется горизонтальный угол между северной частью истинного меридиана и направлением из точки наблюдения на объект, измеряемый по часовой стрелке.
Вертикальная плоскость, проходящая через место наблюдателя и место наблюдаемого объект, называется визирной плоскостью.
Пересечение визирной плоскости с плоскостью истинного горизонта образует линию пеленга, которая и является направлением на объект. Таким образом, истинным пеленгом (ИП) является угол между северной частью истинного меридиана и линией пеленга. Отсчитывается истинный пеленг в круговой системе счета.
При решении отдельных задач используется направление, противоположное истинному пеленгу. Это направление называется обратным истинным пеленгом (ОИП):
ОИП = ИП + 180°, если ИП
ОИП = ИП – 180°, если ИП 180°.
При решении задач, для которых особое значение имеет взаимное расположение курса судна и наблюдаемого объекта, измеряют курсовой угол (КУ) – горизонтальный угол между диаметральной плоскостью судна и направлением на наблюдаемый объект, т.е. угол между носовой частью диаметральной плоскости судна и линией пеленга. Курсовой угол измеряется в круговой или полукруговой системе счета направлений.
В основном курсовые углы измеряют в полукруговой системе и для исключения многозначности им придают наименования, указывающие в сторону какого борта судна (правого или левого) вели счет.
Например: КУ= 15° л/б, КУ= 78° п/б.
При решении задач курсовые углы правого борта считают положительными, а курсовые углы левого борта считают отрицательными.
При решении некоторых задач требуется, чтобы курсовой угол был измерен в круговом счете. Счет при этом ведут от носовой части диаметральной плоскости судна вправо от 0° до 360°. Курсовой угол, измеренный в круговом счете, получил название отсчета курсового угла (ОКУ).
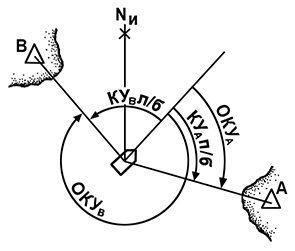
Связь между отсчетом курсового угла и курсовыми углами определяется выражениями:
ОКУ = КУ п/б;
ОКУ = 360° – КУ л/б
Некоторым значениям курсовых углов традиционно присвоены наименования. Например, КУ = 90° – направление, перпендикулярное диаметральной плоскости корабля – называют траверзом.
Математическая зависимость между истинными направлениями:
ИП = ИК + КУ;
ИК = ИП – КУ;
КУ = ИП – ИК.
При расчетах по этим формулам следует помнить о необходимости учитывать знак курсового угла. Другая особенность заключается в том, что истинный курс и истинный пеленг не могут иметь отрицательных значений. Если все же при решении задач будет получено отрицательное значение ИК или ИП, то его следует вычесть из 360°, а полученный результат считать положительным.
Двугранный угол между нордовой частью плоскости истинного меридиана и вертикальной плоскостью, совпадающей с линией перемещения судна называется путевым углом (ПУ).
8. Определение поправок курсоуказателей.
Определение поправки компаса по пеленгу ориентира, место которого нанесено на карту. Сущность этого способа состоит в сравнении истинного пеленга на отдаленный предмет с измеренным на него компасным пеленгом. Для этого необходимо, чтобы места корабля и наблюдаемого объекта (т. е. их координаты) в момент наблюдений были известны. Истинный пеленг с корабля на маяк может быть рассчитан (при известных координатах того и другого) аналитически или снят непосредственно с карты крупного масштаба, компасный пеленг измеряется с помощью компаса. Тогда определяемая поправка компаса найдется по формулам
Δ МК = ОИП – ОКПмк— для магнитного компаса
и
Δ ГК = ИП – КПгк —для гироскопического компаса.
Вследствие того что место наблюдаемого ориентира, как правило, бывает известно с высокой точностью, ошибка в определяемой поправке компаса зависит главным образом от того, насколько точно известно мести корабля, т. е. его координаты. Поэтому рассматриваемый способ определения поправки компаса применяется чаще всего при стоянке корабля в гавани или на рейде, когда место корабля может быть определено высокой точностью. На ходу этот способ может быть применен лишь в том случае, когда имеется реальная возможность определить свое место с ошибкой, не превышающей 25 – 50 метров.
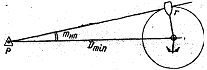
Выбор достаточно удаленного ориентира, когда определение поправки компаса осуществляется с якорного места, должен производиться с таким расчетом, чтобы изменение пеленга за счет разворачивания корабля на якорной цепи не превышало допустимой ошибки в определяемой поправке компаса. Принимая допустимую ошибку определения пеленга mп = ± 0,2° и радиус окружности разворота корабля на якорной цепи r = 50 м, найдем минимальное расстояние Дmin от корабля до наблюдаемого ориентира, при котором возможно применять этот способ определения Δ К:
Dmin = r * ctg mп = r / tg mп = r / mп *arc 1° = 50 * 57,3° / 0,2° = 8 миль.
Следовательно, чтобы определить с ошибкой, не превышающей mп = ±0,2° поправку компаса с якорной позиции по отдаленному ориентиру, нужно последний выбирать на расстоянии не менее 8 миль от места корабля.
Если почему-либо компасный пеленг измерить не представляется возможным, но может быть измерен КУ на него, то искомый КП может быть рассчитан по формуле
КП = КК + КУ
В этом случае одновременно с измерением курсового угла на ориентир необходимо заметить компасный курс.
Определение поправки компаса по сличению показаний двух курсоуказателей. Поправка компаса может быть определена путем сличения его показаний с показаниями другого компаса, поправка которого известна. Сущность способа состоит в том, что в один и тот же момент по сигналу замечаются курсы по обоим компасам. После наблюдений показания второго компаса исправляются его поправкой и из сравнения рассчитанного истинного курса с наблюденным компасным курсом исследуемого компаса находится искомая поправка
ККгк + ΔГК = ИК;
ИК – ККмк = ΔМК
Δ МК = (ККгк – ККмк) + Δ ГК
Разность одновременно замеченных показаний курсов двух компасов (ККгк – ККмк)называется сличением.
Таким образом, определяемая поправка компаса равна сличению плюс поправка компаса, с которым производится сличение. В примере приведен порядок определения Δ МК по сличению с ГК, хотя в принципе сличать можно показания любых курсоуказателей. Важно лишь, чтобы поправка одного из них была известна. Чаще этим способом определяется поправка магнитного компаса.
Определение поправки компаса по пеленгу небесного светила. Сущность способа состоит в том, что поправка компаса находится как разность рассчитанного истинного пеленга на небесное светило (Солнце, Луну, планету, звезду) и наблюденного на него компасного пеленга. Расчет истинного пеленга светила на момент наблюдения компасного пеленга производится по формулам сферической тригонометрии с применением специальных таблиц.. Вывод формул и порядок вычислений по ним подробно излагаются в мореходной астрономии (мы постараемся учебник по мореходной астрономии на сайте разместить в ближайшее время) и поэтому здесь не приводятся. Результаты вычислений истинного пеленга (ИП) на светило и наблюдений его с помощью компаса (КП) реализуются для получения искомой поправки компаса по формулам .
Контрольные вопросы:
1. Системы деления горизонта?
2. Компасный кур – ……….
3. Склонение – ………..
4. Поправка магнитного компаса?
5. Классификация магнитных компасов?
6. Курсовой угол (КУ)?
7. Истинный пеленг – ……
.
