В данной статье рассмотрим способы определить расстояние от точки до точки теоретически и на примере конкретных задач. И для начала введем некоторые определения.
Расстояние между точками – это длина отрезка, их соединяющего, в имеющемся масштабе. Задать масштаб необходимо, чтобы иметь для измерения единицу длины. Потому в основном задача нахождения расстояния между точками решается при использовании их координат на координатной прямой, в координатной плоскости или трехмерном пространстве.
Расстояние между точками на координатной прямой
Исходные данные: координатная прямая Ox и лежащая на ней произвольная точка А. Любой точке прямой присуще одно действительное число: пусть для точки А это будет некое число хA, оно же – координата точки А.

В целом можно говорить о том, что оценка длины некого отрезка происходит в сравнении с отрезком, принятым за единицу длины в заданном масштабе.
Если точке А соответствует целое действительное число, отложив последовательно от точки О до точки по прямой ОА отрезки – единицы длины, мы можем определить длину отрезка OA по итоговому количеству отложенных единичных отрезков.
К примеру, точке А соответствует число 3 – чтобы попасть в нее из точки О, необходимо будет отложить три единичных отрезка. Если точка А имеет координату -4 – единичные отрезки откладываются аналогичным образом, но в другом, отрицательном направлении. Таким образом в первом случае, расстояние ОА равно 3; во втором случае ОА = 4.
Если точка A имеет в качестве координаты рациональное число, то от начала отсчета (точка О) мы откладываем целое число единичных отрезков, а затем его необходимую часть. Но геометрически не всегда возможно произвести измерение. К примеру, затруднительным представляется отложить на координатной прямой дробь 4111.
Вышеуказанным способом отложить на прямой иррациональное число и вовсе невозможно. К примеру, когда координата точки А равна 11 . В таком случае возможно обратиться к абстракции: если заданная координата точки А больше нуля, то OA=xA (число принимается за расстояние); если координата меньше нуля, то OA=-xA . В общем, эти утверждения справедливы для любого действительного числа xA.
Резюмируя: расстояние от начала отсчета до точки, которой соответствует действительное число на координатной прямой, равно:
- 0, если точка совпадает с началом координат;
- xA , если xA>0;
- -xA , если xA<0 .
При этом очевидно, что сама длина отрезка не может быть отрицательной, поэтому, используя знак модуля, запишем расстояние от точки O до точки A с координатой xA: OA=xA

Верным будет утверждение: расстояние от одной точки до другой будет равно модулю разности координат. Т.е. для точек A и B, лежащих на одной координатной прямой при любом их расположении и имеющих соответственно координаты xA и xB : AB=xB-xA.

Расстояние между точками на плоскости
Исходные данные: точки A и B, лежащие на плоскости в прямоугольной системе координат Oxy с заданными координатами: A(xA, yA) и B(xB, yB) .
Проведем через точки А и B перпендикуляры к осям координат Ox и Oy и получим в результате точки проекции: Ax, Ay, Bx, By. Исходя из расположения точек А и B далее возможны следующие варианты:
– если точки А и В совпадают, то расстояние между ними равно нулю;
– если точки А и В лежат на прямой, перпендикулярной оси Ox (оси абсцисс), то точки и совпадают, а |АВ| = |АyBy|. Поскольку, расстояние между точками равно модулю разности их координат, то AyBy=yB-yA , а, следовательно AB=AyBy=yB-yA.

– если точки A и B лежат на прямой, перпендикулярной оси Oy (оси ординат) – по аналогии с предыдущим пунктом: AB=AxBx=xB-xA

– если точки A и B не лежат на прямой, перпендикулярной одной из координатных осей, найдем расстояние между ними, выведя формулу расчета:

Мы видим, что треугольник АВС является прямоугольным по построению. При этом AC=AxBx и BC=AyBy. Используя теорему Пифагора, составим равенство: AB2=AC2+BC2⇔AB2=AxBx2+AyBy2 , а затем преобразуем его: AB=AxBx2+AyBy2=xB-xA2+yB-yA2=(xB-xA)2+(yB-yA)2
Сформируем вывод из полученного результата: расстояние от точки А до точки В на плоскости определяется расчётом по формуле с использованием координат этих точек
AB=(xB-xA)2+(yB-yA)2
Полученная формула также подтверждает ранее сформированные утверждения для случаев совпадения точек или ситуаций, когда точки лежат на прямых, перпендикулярных осям. Так, для случая совпадения точек A и B будет верно равенство: AB=(xB-xA)2+(yB-yA)2=02+02=0
Для ситуации, когда точки A и B лежат на прямой, перпендикулярной оси абсцисс:
AB=(xB-xA)2+(yB-yA)2=02+(yB-yA)2=yB-yA
Для случая, когда точки A и B лежат на прямой, перпендикулярной оси ординат:
AB=(xB-xA)2+(yB-yA)2=(xB-xA)2+02=xB-xA
Расстояние между точками в пространстве
Исходные данные: прямоугольная система координат Oxyz с лежащими на ней произвольными точками с заданными координатами A(xA, yA, zA) и B(xB, yB, zB) . Необходимо определить расстояние между этими точками.
Рассмотрим общий случай, когда точки A и B не лежат в плоскости, параллельной одной из координатных плоскостей. Проведем через точки A и B плоскости, перпендикулярные координатным осям, и получим соответствующие точки проекций: Ax, Ay, Az, Bx, By, Bz

Расстояние между точками A и B являет собой диагональ полученного в результате построения параллелепипеда. Согласно построению измерения этого параллелепипеда: AxBx, AyBy и AzBz
Из курса геометрии известно, что квадрат диагонали параллелепипеда равен сумме квадратов его измерений. Исходя из этого утверждения получим равенство: AB2=AxBx2+AyBy2+AzBz2
Используя полученные ранее выводы, запишем следующее:
AxBx=xB-xA, AyBy=yB-yA, AzBz=zB-zA
Преобразуем выражение:
AB2=AxBx2+AyBy2+AzBz2=xB-xA2+yB-yA2+zB-zA2==(xB-xA)2+(yB-yA)2+zB-zA2
Итоговая формула для определения расстояния между точками в пространстве будет выглядеть следующим образом:
AB=xB-xA2+yB-yA2+(zB-zA)2
Полученная формула действительна также для случаев, когда:
– точки совпадают;
– лежат на одной координатной оси или прямой, параллельной одной из координатных осей.
Примеры решения задач на нахождение расстояния между точками
Исходные данные: задана координатная прямая и точки, лежащие на ней с заданными координатами A(1-2) и B(11+2) . Необходимо найти расстояние от точки начала отсчета O до точки A и между точками A и B.
Решение
- Расстояние от точки начала отсчета до точки равно модулю координаты этой точки, соответственно OA=1-2=2-1
- Расстояние между точками A и B определим как модуль разности координат этих точек: AB=11+2-(1-2)=10+22
Ответ: OA=2-1, AB=10+22
Исходные данные: задана прямоугольная система координат и две точки, лежащие на ней A(1, -1) и B (λ+1, 3) . λ – некоторое действительное число. Необходимо найти все значения этого числа, при которых расстояние АВ будет равно 5.
Решение
Чтобы найти расстояние между точками A и B, необходимо использовать формулу AB=(xB-xA)2+yB-yA2
Подставив реальные значения координат, получим:AB=(λ+1-1)2+(3-(-1))2=λ2+16
А также используем имеющееся условие, что АВ=5 и тогда будет верным равенство:
λ2+16=5λ2+16=25λ=±3
Ответ: АВ = 5, если λ=±3 .
Исходные данные: задано трехмерное пространство в прямоугольной системе координат Oxyz и лежащие в нем точки A (1, 2, 3) и B-7, -2, 4 .
Решение
Для решения задачи используем формулу AB=xB-xA2+yB-yA2+(zB-zA)2
Подставив реальные значения, получим: AB=(-7-1)2+(-2-2)2+(4-3)2=81=9
Ответ: |АВ| = 9
I. Механика
Тестирование онлайн
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Угловая скорость
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период и частота
Период вращения T – это время, за которое тело совершает один оборот.
Частота вращение – это количество оборотов за одну секунду.
Частота и период взаимосвязаны соотношением
Связь с угловой скоростью
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено – это есть период T. Путь, который преодолевает точка – это есть длина окружности.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
Вращение Земли
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Как вывести формулу центростремительного ускорения
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение – изменение скорости за единицу времени. Найдем разницу векторов.
Разница векторов есть . Так как , получим
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Движение по окружности
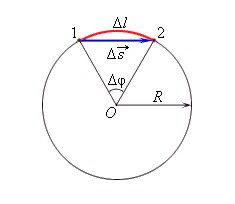
Движение по окружности – простейший случай криволинейного движения тела. Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Зная угловое перемещение, можно вычислить длину дуги окружности (путь), которую прошло тело.
Если угол поворота мал, то ∆ l ≈ ∆ s .
Угловая скорость
При криволинейном движении вводится понятие угловой скорости ω , то есть скорости изменения угла поворота.
Определение. Угловая скорость
Угловая скорость в данной точке траектории – предел отношения углового перемещения ∆ φ к промежутку времени ∆ t , за которое оно произошло. ∆ t → 0 .
ω = ∆ φ ∆ t , ∆ t → 0 .
Единица измерения угловой скорости – радиан в секунду ( р а д с ).
Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой скорости:
Нормальное ускорение
При равномерном движении по окружности, скорости v и ω остаются неизменными. Меняется только направление вектора линейной скорости.
При этом равномерное движение по окружности на тело действует центростремительное, или нормальное ускорение, направленное по радиусу окружности к ее центру.
a n = ∆ v → ∆ t , ∆ t → 0
Модуль центростремительного ускорения можно вычислить по формуле:
a n = v 2 R = ω 2 R
Докажем эти соотношения.
Рассмотрим, как изменяется вектор v → за малый промежуток времени ∆ t . ∆ v → = v B → – v A → .
В точках А и В вектор скорости направлен по касательной к окружности, при этом модули скоростей в обеих точках одинаковы.
По определению ускорения:
a → = ∆ v → ∆ t , ∆ t → 0
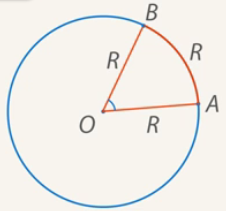
Взглянем на рисунок:
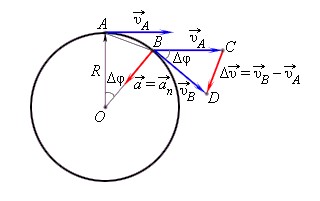
Треугольники OAB и BCD подобны. Из этого следует, что O A A B = B C C D .
Если значение угла ∆ φ мало, расстояние A B = ∆ s ≈ v · ∆ t . Принимая во внимание, что O A = R и C D = ∆ v для рассмотренных выше подобных треугольников получим:
R v ∆ t = v ∆ v или ∆ v ∆ t = v 2 R
При ∆ φ → 0 , направление вектора ∆ v → = v B → – v A → приближается к направлению на центр окружности. Принимая, что ∆ t → 0 , получаем:
a → = a n → = ∆ v → ∆ t ; ∆ t → 0 ; a n → = v 2 R .
При равномерном движении по окружности модуль ускорения остается постоянным, а направление вектора изменяется со временем, сохраняя ориентацию на центр окружности. Именно поэтому это ускорение называется центростремительным: вектор в любой момент времени направлен к центру окружности.
Запись центростремительного ускорения в векторной форме выглядит следующим образом:
Здесь R → – радиус вектор точки на окружности с началом в ее центре.
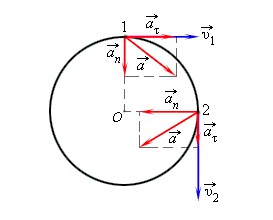
Тангенциальное ускорение
В общем случае ускорение при движении по окружности состоит из двух компонентов – нормальное, и тангенциальное.
Рассмотрим случай, когда тело движется по окружности неравномерно. Введем понятие тангенциального (касательного) ускорения. Его направление совпадает с направлением линейной скорости тела и в каждой точке окружности направлено по касательной к ней.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Здесь ∆ v τ = v 2 – v 1 – изменение модуля скорости за промежуток ∆ t
Направление полного ускорения определяется векторной суммой нормального и тангенциального ускорений.
Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый момент времени скорость тела можно разложить на составляющие v x и v y .
Если движение равномерное, величины v x и v y а также соответствующие координаты будут изменяться во времени по гармоническому закону с периодом T = 2 π R v = 2 π ω
Движение по окружности с постоянной по модулю скоростью
теория по физике 🧲 кинематика
Криволинейное движение — движение, траекторией которого является кривая линия. Вектор скорости тела, движущегося по кривой линии, направлен по касательной к траектории. Любой участок криволинейного движения можно представить в виде движения по дуге окружности или по участку ломаной.
Движение по окружности с постоянной по модулю скоростью — частный и самый простой случай криволинейного движения. Это движение с переменным ускорением, которое называется центростремительным.
Особенности движения по окружности с постоянной по модулю скоростью:
- Траектория движения тела есть окружность.
- Вектор скорости всегда направлен по касательной к окружности.
- Направление скорости постоянно меняется под действием центростремительного ускорения.
- Центростремительное ускорение направлено к центру окружности и не вызывает изменения модуля скорости.
Период, частота и количество оборотов
Пусть тело двигается по окружности беспрерывно. Когда оно сделает один оборот, пройдет некоторое время. Когда тело сделает еще один оборот, пройдет еще столько же времени. Это время не будет меняться, потому что тело движется с постоянной по модулю скоростью. Такое время называют периодом.
Период — время одного полного оборота. Обозначается буквой T. Единица измерения — секунды (с).

t — время, в течение которого тело совершило N оборотов
За один и тот же промежуток времени тело может проходить лишь часть окружности или совершать несколько единиц, десятков, сотен или более оборотов. Все зависит от длины окружности и модуля скорости.
Частота — количество оборотов, совершенных в единицу времени. Обозначается буквой ν («ню»). Единица измерения — Гц.
N — количество оборотов, совершенных телом за время t.
Период и частота — это обратные величины, определяемые формулами:
Количество оборотов выражается следующей формулой:
Пример №1. Шарик на нити вращается по окружности. За 10 секунд он совершил 20 оборотов. Найти период и частоту вращения шарика.
Линейная и угловая скорости
Линейная скорость
Линейная скорость — это отношение пройденного пути ко времени, в течение которого этот путь был пройден. Обозначается буквой v. Единица измерения — м/с.

l — длина траектории, вдоль которой двигалось тело за время t
Линейную скорость можно выразить через период. За один период тело делает один оборот, то есть проходить путь, равный длине окружности. Поэтому его скорость равна:
R — радиус окружности, по которой движется тело
Если линейную скорость можно выразить через период, то ее можно выразить и через частоту — величину, обратную периоду. Тогда формула примет вид:
Выразив частоту через количество оборотов и время, в течение которого тело совершало эти обороты, получим:
Угловая скорость
Угловая скорость — это отношение угла поворота тела ко времени, в течение которого тело совершало этот поворот. Обозначается буквой ω. Единица измерения — радиан в секунду (рад./с).

ϕ — угол поворота тела. t — время, в течение которого тело повернулось на угол ϕ
Радиан — угол, соответствующий дуге, длина которой равна ее радиусу. Полный угол равен 2π радиан.
За один полный оборот тело поворачивается на 2π радиан. Поэтому угловую скорость можно выразить через период:

Выражая угловую скорость через частоту, получим:
Выразив частоту через количество оборотов, формула угловой скорости примет вид:
Сравним две формулы:
Преобразуем формулу линейной скорости и получим:

Отсюда получаем взаимосвязь между линейной и угловой скоростями:
Полезные факты
- У вращающихся прижатых друг к другу цилиндров линейные скорости точек их поверхности равны: v1 = v2.
- У вращающихся шестерен линейные скорости точек их поверхности также равны: v1 = v2.
- Все точки вращающегося твердого тела имеют одинаковые периоды, частоты и угловые скорости, но разные линейные скорости. T1 = T2, ν1 = ν2, ω1 = ω2. Но v1 ≠ v2.
Пример №2. Период обращения Земли вокруг Солнца равен одному году. Радиус орбиты Земли равен 150 млн. км. Чему примерно равна скорость движения Земли по орбите? Ответ округлить до целых.
В году 365 суток, в одних сутках 24 часа, в 1 часе 60 минут, в одной минуте 60 секунд. Перемножив все эти числа между собой, получим период в секундах.

За каждую секунду Земля проходит расстояние, равное примерно 30 км.
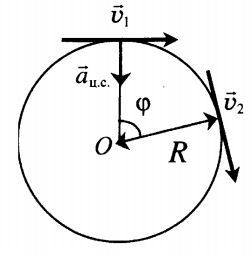
Центростремительное ускорение
Центростремительное ускорение — ускорение с постоянным модулем, но меняющимся направлением. Поэтому оно вызывает изменение направления вектора скорости, но не изменяет его модуль. Центростремительное ускорение обозначается как aц.с.. Единица измерения — метры на секунду в квадрате (м/с 2 ). Центростремительное ускорение можно выразить через линейную и угловую скорости, период, частоту и количество оборотов/время:

Пример №3. Рассчитать центростремительное ускорение льва, спящего на экваторе, в системе отсчета, две оси которой лежат в плоскости экватора и направлены на неподвижные звезды, а начало координат совпадает с центром Земли.
Спящий лев сделает один полный оборот тогда, когда Земля сделает один оборот вокруг своей оси. Земля делает это за время, равное 1 сутки. Поэтому период обращения равен 1 суткам. Количество секунд в сутках: 1 сутки = 24•60•60 секунд = 86400 секунд = 86,4∙10 3 секунд.
Радиус Земли равен 6400 км. В метрах это будет 6,4∙10 6 . Теперь у нас есть все, что нужно для вычисления центростремительного ускорения. Подставляем данные в формулу:

Алгоритм решения
- Записать исходные данные.
- Записать формулу для определения искомой величины.
- Подставить известные данные в формулу и произвести вычисления.
Решение
Записываем исходные данные:
- Радиус окружности, по которой движется автомобиль: R = 100 м.
- Скорость автомобиля во время движения по окружности: v = 20 м/с.
Формула, определяющая зависимость центростремительного ускорения от скорости движения тела:
Подставляем известные данные в формулу и вычисляем:
pазбирался: Алиса Никитина | обсудить разбор | оценить
Точка движется по окружности радиусом R с частотой обращения ν. Как нужно изменить частоту обращения, чтобы при увеличении радиуса окружности в 4 раза центростремительное ускорение точки осталось прежним?
а) увеличить в 2 раза б) уменьшить в 2 раза в) увеличить в 4 раза г) уменьшить в 4 раза
Алгоритм решения
- Записать исходные данные.
- Определить, что нужно найти.
- Записать формулу зависимости центростремительного ускорения от частоты.
- Преобразовать формулу зависимости центростремительного ускорения от частоты для каждого из случаев.
- Приравнять правые части формул и найти искомую величину.
Решение
Запишем исходные данные:
Центростремительное ускорение определяется формулой:
Запишем формулы центростремительного ускорения для 1 и 2 случаев соответственно:
Так как центростремительное ускорение в 1 и 2 случае одинаково, приравняем правые части уравнений:
Произведем сокращения и получим:


Это значит, чтобы центростремительное ускорение осталось неизменным после увеличения радиуса окружности в 4 раза, частота должна уменьшиться вдвое. Верный ответ: «б».
pазбирался: Алиса Никитина | обсудить разбор | оценить
[spoiler title=”источники:”]
http://zaochnik.com/spravochnik/fizika/kinematika/dvizhenie-po-okruzhnosti/
[/spoiler]
Содержание
- Расстояние от точки до прямой
- Геометрия. 7 класс
- 61. Стереометрия Читать 0 мин.
- 61.333. Расстояния
- Расстояние от точки до прямой. Расстояние между параллельными прямыми
- Геометрия. 7 класс
Расстояние от точки до прямой
Пусть нам даны прямая  и точка А, не лежащая на данной прямой. Опустим из точки А к прямой перпендикуляр АН и соединим точку А с произвольной точкой М, лежащей на прямой А и отличной от Н.
и точка А, не лежащая на данной прямой. Опустим из точки А к прямой перпендикуляр АН и соединим точку А с произвольной точкой М, лежащей на прямой А и отличной от Н.

Следовательно, перпендикуляр, проведенный из точки к прямой, меньше любой наклонной, проведенной из той же точки к этой прямой.
Для того, чтобы найти расстояние от точки до прямой, нужно с помощью чертежного угольника провести перпендикуляр из данной точки к данной прямой, а затем измерить длину этого перпендикуляра.

Расстояние от точки Е до прямой равно 6,5 см, расстояние от точки В до прямой равно 11,5 см.
Поделись с друзьями в социальных сетях:
Источник
Геометрия. 7 класс
Расстояние от точки до прямой. Расстояние между параллельными прямыми
Перпендикуляр
Расстояние
Треугольник
Равнобедренный треугольник
Расстояние между параллельными прямыми
Необходимо запомнить
Наклонной, проведенной из данной точки к данной прямой, называется любой отрезок, соединяющий данную точку с точкой прямой, не являющийся перпендикуляром к прямой.
Длина перпендикуляра, проведенного из точки к прямой, называется расстоянием от этой точки до прямой.
Все точки каждой из двух параллельных прямых равноудалены от другой прямой.
Все точки плоскости, расположенные по одну сторону от данной прямой и равноудаленные от неё, лежат на прямой, параллельной данной.
Расстояние от произвольной точки одной из параллельных прямых до другой прямой называется расстоянием между этими прямыми.
Теорема. Все точки каждой из двух параллельных прямых равноудалены от другой прямой.
Справедливо утверждение, обратное доказанной теореме: все точки плоскости, расположенные по одну сторону от данной прямой и равноудалённые от неё, лежат на прямой, параллельной данной.
Параллельность прямых
Докажем утверждение: все точки плоскости, расположенные по одну сторону от данной прямой и равноудалённые от неё, лежат на прямой, параллельной данной.
Доказать: точки A, B, C – принадлежат одной прямой.
Источник
61. Стереометрия  Читать 0 мин.
Читать 0 мин.
61.333. Расстояния
Расстояния
Задача на нахождения расстояния в стереометрической фигуре является главной и самой важной из всех. Прежде всего определимся с тем, что имеется ввиду под словом «расстояние», ведь их может быть бесконечно много.
Расстояние между объектами в геометрии – это кратчайшее из расстояний между ними.

В стереометрии найти расстояние можно между следующими комбинациями фигур:

РАССТОЯНИЕ МЕЖДУ ТОЧКАМИ
Расстояние между точками– это длина отрезка, соединяющего эти точки.

В задачах на стереометрию мы не можем просто воспользоваться линейкой, и длину этого отрезка должны найти аналитически. Поэтому длину отрезка AB между точками A и B находят как сторону треугольника, если отрезок AB удается включить в некоторый треугольник в качестве одной из его сторон.
То есть если в задаче предлагается найти расстояние между точками, нужно задать себе вопрос: «В каком треугольнике этот отрезок является стороной?», затем построить этот треугольник и найти в нем нужную сторону.



РАССТОЯНИЕ МЕЖДУ ТОЧКОЙ И ПРЯМОЙ
Расстояние от точки до прямой – длина перпендикуляра, опущенного из точки на прямую.

Этот отрезок перпендикуляра можно вычислить, включив его в треугольник (или трапецию) в качестве одной из высот. То есть нужно задать себе вопрос: «В каком треугольнике этот отрезок является высотой?», затем построить этот треугольник и найти в нем высоту.

РАССТОЯНИЕ МЕЖДУ ТОЧКОЙ И ПЛОСКОСТЬЮ
Существует несколько способов нахождения расстояния от точки до плоскости:


К этому способу, аналогично, обращаются, если расстояние из точки M на плоскость опускать неудобно, а удобно опустить равный ему перпендикуляр из другой точки, лежащей на одной плоскости с M.

Расстояние от точки M до плоскости β – это перпендикуляр, опущенный из точки на плоскость, то есть по сути это высота в некоторой пирамиде с вершиной M и плоскостью основания, лежащей на β. Если легко вычислить объем этой пирамиды, используя другое основание и другую высоту, то через этот объем можно найти нужное расстояние.

РАССТОЯНИЕ МЕЖДУ СКРЕЩИВАЮЩИМИСЯ ПРЯМЫМИ
Существует несколько способов нахождения расстояния между скрещивающимися прямыми:
1. Построение взаимного перпендикуляра.

2. Построение параллельной прямой.
К этому способу обращаются, если строить взаимный перпендикуляр неудобно и одна из скрещивающихся прямых уже заключена в удобную плоскость.
 К этому способу обращаются, если строить взаимный перпендикуляр неудобно и скрещивающиеся прямые уже заключены в удобные плоскости.
К этому способу обращаются, если строить взаимный перпендикуляр неудобно и скрещивающиеся прямые уже заключены в удобные плоскости.
3. Построение параллельной плоскости.
Источник
Расстояние от точки до прямой. Расстояние между параллельными прямыми

Следовательно, перпендикуляр, проведённый из точки к прямой, меньше любой наклонной, проведённой из той же точки к этой прямой. Длина перпендикуляра, проведённого из точки к прямой, называется расстоянием от этой точки до прямой. Отметим, что расстояние от точки до прямой равно наименьшему из расстояний от этой точки до точек прямой. На рисунке 137 расстояние от точки В до прямой р равно 3 см, а расстояние от точки С до этой прямой равно 5 см.

Прежде чем ввести понятие расстояния между параллельными прямыми, рассмотрим одно из важнейших свойств параллельных прямых.
Все точки каждой из двух параллельных прямых равноудалены от другой прямой.
Рассмотрим параллельные прямые а и B. Отметим на прямой а точку А и проведём из этой точки перпендикуляр АВ к прямой B (рис. 138). Докажем, что расстояние от любой точки X прямой а до прямой b равно АВ.

Проведём из точки X перпендикуляр ХУ к прямой B. Так как ХY ⊥ b, то ХY ⊥ a. Прямоугольные треугольники ABY и YXA равны по гипотенузе и острому углу (AY — общая гипотенуза, а углы 1 и 2 равны как накрест лежащие углы при пересечении параллельных прямых а и B секущей AY). Следовательно, ХY = АВ.
Итак, любая точка X прямой а находится на расстоянии АВ от прямой B. Очевидно, все точки прямой b находятся на таком же расстоянии от прямой а. Теорема доказана.
Источник
Геометрия. 7 класс
Конспект урока
Расстояние от точки до прямой. Расстояние между параллельными прямыми
Перечень рассматриваемых вопросов:
Наклонной, проведенной из данной точки к данной прямой, называется любой отрезок, соединяющий данную точку с точкой прямойине являющийся перпендикуляром к прямой.
Длина перпендикуляра, проведенного из точки к прямой, называется расстоянием от этой точки до прямой.
Все точки каждой из двух параллельных прямых равноудалены от другой прямой.
Все точки плоскости, расположенные по одну сторону от данной прямой и равноудаленные от неё, лежат на прямой, параллельной данной.
Расстояние от произвольной точки одной из параллельных прямых до другой прямой называется расстоянием между этими прямыми.
Теоретический материал для самостоятельного изучения.
Расстояние между двумя точками – длина отрезка, соединяющего эти точки. Введём также следующие понятия:
1) расстояние от точки до прямой;
2) расстояние между параллельными прямыми.

Пусть отрезок АН – перпендикуляр, проведённый из точки А к прямой а, М – любая точка прямой а, отличная от Н. Отрезок АМ называется наклонной, проведённой из точки А к прямой а. В прямоугольном треугольнике АНМ катет АН меньше гипотенузы АМ. Следовательно, перпендикуляр, проведённый из точки к прямой, меньше любой наклонной, проведённой из той же точки к этой прямой.
Длина перпендикуляра, проведённого из точки к прямой, называется расстоянием от этой точки до прямой.

Отметим, что расстояние от точки до прямой равно наименьшему из расстояний от этой точки до точек прямой.
На рисунке расстояние от точки В до прямой р равно 3 см, а расстояние от точки С до этой прямой равно 5 см.
Прежде чем ввести понятие расстояния между параллельными прямыми, рассмотрим одно из важнейших свойств параллельных прямых.

Теорема. Все точки каждой из двух параллельных прямых равноудалены от другой прямой.
Доказательство. Рассмотрим параллельные прямые а и b. Отметим на прямой a точку A и проведём из этой точки перпендикуляр AB к прямой b. Докажем, что расстояние от любой точки X прямой а до прямой b равно АВ.
Проведём из точки Х перпендикуляр XY к прямой b. Так как XY перпендикулярно b, то XY перпендикулярно а. Прямоугольные треугольники ABY и YXA равны по гипотенузе и острому углу (AY – общая гипотенуза, а углы 1 и 2 равны как накрест лежащие углы при пересечении параллельных прямых a и b секущей AY). Следовательно, XY = AB.


Итак, любая точка X прямой a находится на расстоянии AB от прямой b. Очевидно, что все точки прямой b находятся на таком же расстоянии от прямой a. Теорема доказана.
Из доказанной теоремы следует, что точка, движущаяся по одной из параллельных прямых, все время находится на одном и том же расстоянии от другой прямой.
Расстояние от произвольной точки одной из параллельных прямых до другой прямой называется расстоянием между этими прямыми.
Отметим, что расстояние между параллельными прямыми равно наименьшему из расстояний от точек одной прямой до точек другой прямой.
Замечание. Справедливо утверждение, обратное доказанной теореме: все точки плоскости, расположенные по одну сторону от данной прямой и равноудалённые от неё, лежат на прямой, параллельной данной.
Доказательство: по аксиоме параллельных прямых, через точку A проведем прямую b, b║a, тогда все точки b║a равноудаленыот точек прямой a. Докажем, что B, C∈ b.

Пусть B∉ b, C∉ b, значит, расстояние от точки B до a и C будет больше или меньше, чем расстояние h. Но это противоречит AA1 = BB1 = CC1.
Следовательно, наше предположение неверно и A, B и С ∈ b || a, что и требовалось доказать.
Разбор заданий тренировочного модуля.
В равностороннем треугольнике ABC проведена биссектриса AD. Расстояние от точки D до прямой AC равно 12 см. Найти расстояние от точки A до прямой BC.
Объяснение: равносторонним треугольником называется треугольник с тремя равными сторонами (значит, и с тремя равными углами, то есть – по 60°). Равносторонний треугольник является частным случаем равнобедренного, поэтому все свойства, присущие равнобедренному треугольнику, распространяются и на равносторонний. Поэтому АD – не только биссектриса, но ещё и высота, стало быть AD⊥BC
Поскольку расстояние от точки D до прямой АС – это длина перпендикуляра, опущенного из точки D на прямую AC, то DH – данное расстояние. Рассмотрим треугольник AHD. В нём угол H = 90°, так как DH – перпендикуляр к AC (по определению расстояния от точки до прямой). Кроме этого, в данном треугольнике катет DH лежит против угла DAH = 30°, поэтому AD = 2 ∙ 12= 24см (по свойству).
Расстояние от точки А до прямой ВС – это длина опущенного на прямую ВС перпендикуляра. По доказанному AD⊥ BC, значит, AD = 24 см.
Источник
27
ЛЕКЦИЯ
4.
Движения
и пути в пространстве
![]()
Вектор-функции
и пути.
Обозначим, как обычно, через
![]()
– репер в евклидовом пространстве
![]() ,
,
тогда каждый вектор
![]()
запишется в виде следующего разложения
![]() .
.
Пусть
![]()
– некоторый промежуток числовой оси.
На промежутке
![]()
определим произвольно три действительные
функции:
![]()
![]() .
.
Тогда каждой точке промежутка
![]()
будет поставлена в соответствие
некоторая точка
![]() ,
,
имеющая радиус-вектор
![]() .
.
Отображение
![]()
промежутка
![]()
в евклидово пространство
![]()
называется вектор-функцией
из
![]()
в
![]() ,
,
определённой на промежутке
![]() .
.
Функции
![]()
![]()
называются компонентами,
или координатными
функциями,
вектор-функции
![]() .
.
Определение 4.1.
Вектор-функция
![]()
называется непрерывной
(![]()
раз дифференцируемой;
![]()
раз непрерывно дифференцируемой),
если непрерывны (![]()
раз дифференцируемы;
![]()
раз непрерывно дифференцируемы) её
компоненты
![]()
![]() .
.![]()

Пример 4.1.
Зафиксируем декартову прямоугольную
систему координат в пространстве
![]()
(рисунок 4.1).
Пусть в пространстве
![]()
движется материальная точка
![]() ,
,
положение которой в каждый момент
времени
![]()
задаётся радиус-вектором
![]() .
.
Если известен закон движения точки
![]()
– заданы функции
![]() ,
,
![]() ,
,
![]() ,
,
где
![]() астрономическое
астрономическое
время, то для радиус-вектора имеем
![]() .
.
Получаем
отображение
промежутка времени
![]()
в пространство
![]() .
.
Разным значениям моментов времени
![]()
![]()
соответствуют разные радиус-векторы,
определяющие положение точки
![]()
в трёхмерном пространстве. Если
координатные функции непрерывны, то
конец радиус-вектора описывает в
пространстве некоторую непрерывную
кривую, которая называется годографом
или траекторией.
![]()
Определение 4.2.
Непрерывное
отображение
![]()
любого промежутка
![]()
действительной числовой оси
![]()
в евклидово пространство
![]()
называется движением.
Образ
![]()
промежутка
![]()
в пространстве
![]()
называется следом
движения
или путём.
![]()
Конструкцию
движения,
полгая
![]()
![]() ,
,
можно задать векторным соотношением
![]() ,
,
(1)
или
эквивалентной системой скалярных
соотношений

(2)
Соотношения
(1) и (2) называются, соответственно,
векторной
и скалярной
параметризацией
движения
![]() ,
,
а путь
![]() ,
,
при наличии соотношений вида (1) или (2),
позволяющих вычислять координаты точек
пути для различных значений параметра
![]() ,
,
называется параметризованным
путём.
Если
![]()
– замкнутый промежуток, то путь
![]()
называется замкнутым,
а точки
![]() ,
,
![]()
(3)
– началом
и концом
замкнутого пути
![]() ,
,
соответственно. Если имеется два пути
![]()
и
![]() ,
,
причём конец первого пути совпадает с
началом второго пути, то говорят о сумме
путей
![]() ,
,
которая таким образом, с теоретико-множественнй
точки зрения является их объединением.
Итак,
движение
![]()
есть
непрерывная вектор-функция, определённая
на замкнутом или открытом промежутке
![]()
действительной числовой оси
![]() .
.
Отметим,
что вместо термина параметризованный
путь для обозначения следа движения
![]()
часто используют термин парамтризованная
кривая,
имея в виду возможность изображения
множества
![]()
на чертеже. Формулы примера 4.1 определяют
движение
![]() ;
;
геометрическое место конечных точек
радиус-вектора
![]()
при различных значениях параметра
![]() ,
,
является параметризованным путём; точки
![]()
и
![]()
– начало и конец пути, соответственно.
В пространстве состояний классической
механики след движения (путь) – это
годограф
конечной точки радиус-вектора или
траектория
материальной точки.
На
движения очевидным образом переносятся
правила дифференцирования обычных
скалярных функций. Если
![]()
и
![]()
– два движения,
![]() ,
,
![]()
– соответствующие им параметризации,
а
![]()
– некоторая скалярная функция, то
справедливы проверяемые непосредственно
формулы дифференцирования:
![]() ,
,
(4)
![]() ,
,
(5)
![]() .
.
(6)
Примеры
параметризованных путей в пространствах
![]()
и
![]() .
.
Приведём некоторые примеры параметризованных
путей в двумерном и трёхмерном евклидовых
пространствах.
Пример
4.2. Рассмотрим
в пространстве
![]()
движение с параметризацией
![]() ,
,
![]() ,
,
(7)
где
![]()
– параметр, принимающий значения
в промежутке
![]() .
.
Точка
![]()
исключается, чтобы не повторять точку
![]()
(для удобства иногда полагают
![]() ).
).
Уравнения (7) в векторном виде записываются
так:
![]() .
.
(7, а)



![]()
![]()



![]()
![]()
![]()


![]()


![]()
![]()
![]()
Рис. 4.2.
Здесь
![]()
и
![]()
– орты локального репера с центром в
точке
![]() .
.
На рисунке 4.2 в декартовой системе
координат изображен след движения
– параметризованный
путь (7) (орты локальной системы координат
не изображены), являющийся окружностью
с центром в точке
![]() .
.
Действительно, преобразуем параметрические
уравнения (7) к виду
![]() ,
,
![]() ,
,
возведём
обе их части в квадрат и сложим. В
результате получим неявное
уравнение
параметризованного пути (7)
![]() ,
,
(8)
известное
ещё из школьного курса математики как
уравнение
окружности с центром в точке
![]() .
.
Итак,
в пространстве
![]()
движение
![]()
с параметризацией
![]() ,
,
(9)
имеет
в качестве своего следа параметризованный
путь – окружность
(8) радиуса
![]()
с центром в точке
![]() .
.
Из
проведённого рассмотрения следует, что
параметр
![]()
имеет смысл угла между положительным
направлением оси
![]()
и радиус-вектором текущей точки
![]()
в локальной декартовой системе координат.
![]()
Пример
4.3. Обозначим
в (7)
![]()
и рассмотрим параметризованный путь,
который получается из пути (7) или, что
тоже самое, из (9), сжатием в
![]()
раз относительно оси
![]() ,
,
то есть, умножением координаты
![]()
на величину
![]() .
.
Умножая второе уравнение из (7) на
![]() ,
,
получим:
![]() ,
,
![]() .
.
Обозначая
![]()
и
![]() ,
,
имеем:
![]() ,
,
![]() .
.
(10)
В
уравнениях (10) мы опустили штрихи у
индекса координаты
![]() .
.
Для случая, когда
![]()
и
![]() ,
,
путь
![]()
с параметризацией
 ,
,
(11)

![]()


![]()
Рис. 4.3.
изображён
на рисунке 4.3. Отметим, что в этом случае
параметр
![]()
уже не является углом между радиус-вектором
текущей точки
![]()
и осью
![]() .
.
Действительно, предположим, что
![]()
– это угол между осью
![]()
и радиус-вектором текущей точки
![]() .
.
Тогда имеем
![]() ,
,
что
конечно при
![]()
невозможно.
Как
известно, путь
(11) называется эллипсом.
Этот объект изучался в разделе кривые
второго порядка
в аналитической геометрии.
Для
получения неявных уравнений пути (11)
нужно исключить из (10) параметр
![]() .
.
Для этого умножим первое из уравнений
(10) на
![]() ,
,
а второе на
![]() ,
,
возведём в квадрат и результаты сложим.
После несложных преобразований получим:
 .
.
(12)
Для
случая
![]()
и
![]()
имеем известное из курса алгебры и
аналитической геометрии каноническое
уравнение эллипса
![]() .
.
(13)
Напомним,
что величины
![]()
и
![]()
называются, соответственно, большой
и малой полуосями эллипса.
![]()
Пример 4.4.
Рассмотрим в пространстве
![]()
путь, заданный векторной параметризацией
![]() ,
,
(14)

или
скалярной параметризацией
 .
.
(15)
Исключая
параметр
![]()
из уравнений (15), получаем неявное
уравнение пути, которое известно курса
аналитической геометрии как уравнение
параболы с вершиной в точке
![]()
(рисунок
4.4, где изображёна часть следа пути на
промежутке изменения параметра
![]() )
)
![]() .
.
(16)
Обозначая
![]() ,
,
![]()
и полагая
![]() ,
,
получаем каноническое уравнение параболы
с вершиной в начале системы координат
![]() .
.
Итак, путь,
соответствующий движению
![]()
с параметризацией (15) – это парабола
с вершиной в точке
![]() .
.
![]()
Пример 4.5.
Рассмотрим в пространстве
![]()
движение
![]() ,
,
параметризованное векторным соотношением
![]()
(17)
или
скалярными соотношениями
 .
.
(18)
Путь
(18) в пространстве
![]()
называется винтовой
линией.
Точки винтовой линии, соответствующие
двум значениям параметра
![]()
и
![]() ,
,
отличаются друг от друга только своей
координатой
![]()
и при этом, на число
![]() .
.
Число
![]()
называется шагом
винтовой линии, а число
![]()
называется радиусом
винтовой линии.
![]()
Преобразование
параметра.
Векторная параметризация
![]() ,
,
где
![]() ,
,
пути
![]()
движения
![]()
задаётся координатными функциями
![]()
![]() .
.
Продемонстрируем примером, что для
одного и того же пути можно ввести, по
крайней мере, две различные параметризации.
Пример 1.6.
Рассмотрим множество
![]() ,
,
имеющее
геометрическим образом верхнюю единичную
полуокружность. Пусть
![]() .
.
Зададим движение
![]()
формулами
![]() .
.
Тогда,
очевидно,
![]() ,
,
![]() ,
,
![]() .
.
Поэтому
![]()
– параметризованный путь. Ранее мы
рассмотрели другую параметризацию пути
![]() ,
,
которая при
![]()
имеет вид
![]() ,
,
где
![]()
– угол.
![]()
Определение 1.3.
Пусть
![]()
и
![]()
– два одновременно замкнутых или
одновременно открытых промежутка
действительной числовой оси
![]() .
.
Функция
![]() ,
,
отображающая промежуток
![]()
на промежуток
![]() ,
,
называется преобразованием
параметра
(от
![]()
к
![]() ),
),
если она непрерывна и биективна.
![]()
Таким
образом, движения можно параметризовать
разными параметрами. Пусть, например,
![]() .
.
Тогда по определению, имеем:
![]() ,
,
![]() .
.
Пусть, далее,
![]()
и
![]()
– два преобразования параметра от
![]()
к
![]()
и от
![]()
к
![]() ,
,
соответственно. Тогда композиция функций
![]()
является преобразованием параметра от
![]()
к
![]() .
.

Справедлива
следующая лемма.
Лемма 1.1.
Пусть
![]()
– некоторое движение, а
![]()
– параметризация
пути
![]() .
.
Тогда, если
![]()
– преобразование параметра, то отображение
![]()
также является движением.
Определение 1.4.
Параметризованные
движения
![]()
и
![]()
называются сильно
эквивалентными,
если существует преобразование параметра
![]()
(или преобразование параметра
![]() )
)
такое, что
![]()
(или, соответственно,
![]() )
)
. Эти движения называются эквивалентными,
если существуют такие параметризованные
движения
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
что
![]() ,
,
![]() ,
,
а параметризованные движения
![]()
и
![]()
при
![]()
сильно эквивалентны.
![]()
Геометрический смысл перемещения заключается в том, что перемещение есть площадь фигуры, заключенной между графиком скорости, осью времени и прямыми, проведенными перпендикулярно к оси времени через точки, соответствующие времени начала и конца движения.
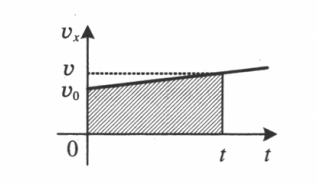
При равноускоренном прямолинейном движении перемещение определяется площадью трапеции, основаниями которой служат проекции начальной и конечной скорости тела, а ее боковыми сторонами — ось времени и график скорости соответственно. Поэтому перемещение (путь) можно вычислить по формуле:
Формула перемещения
Пример №1. По графику определить перемещение тела в момент времени t=3 с.
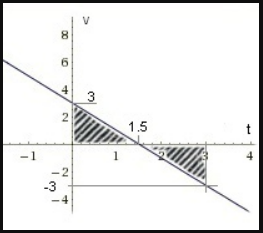
Перемещение есть площадь фигуры, ограниченной графиком скорости, осью времени и перпендикулярами, проведенными к ней. Поэтому в нашем случае:

Извлекаем из графика необходимые данные:
- Фигура 1. Начальная скорость — 3 м/с. Конечная — 0 м/с. Время — 1,5 с.
- Фигура 2. Начальная скорость — 0 м/с. Конечная — –3 м/с. Время — 1,5 с (3 с – 1,5 с).
Подставляем известные данные в формулу:

Перемещение равно 0, так как тело сначала проделало некоторый путь, а затем вернулось в исходное положение.
Варианты записи формулы перемещения
Конечная скорость движения тела часто неизвестна. Поэтому при решении задач вместо нее обычно подставляют эту формулу:
v = v0 ± at
В итоге получается формула:
Если движение равнозамедленное, в формуле используется знак «–». Если движение равноускоренное, оставляется знак «+».
Если начальная скорость равна 0 (v0 = 0), эта формула принимает вид:
Если неизвестно время движения, но известно ускорение, начальная и конечная скорости, то перемещение можно вычислить по формуле:
Пример №2. Найти тормозной путь автомобиля, который начал тормозить при скорости 72 км/ч. Торможение до полной остановки заняло 3 секунды. Модуль ускорения при этом составил 2 м/с.
Перемещение при разгоне и торможении тела
Все перечисленные выше формулы работают, если направление вектора ускорения и вектора скорости совпадают (а↑↑v). Если векторы имеют противоположное направление (а↑↓v), движение следует описывать в два этапа:
Этап торможения
Время торможения равно разности полного времени движения и времени второго этапа:
t1 = t – t2
Когда тело тормозит, через некоторое время t1 оно останавливается. Поэтому скорость в момент времени t1 равна 0:
0 = v01 – at1
При торможении перемещение s1 равно:
Этап разгона
Время разгона равно разности полного времени движения и времени первого этапа:
t2 = t – t1
Тело начинает разгоняться сразу после преодоления нулевого значения скорости, которую можно считать начальной. Поэтому скорость в момент времени t2 равна:
v = at2
При разгоне перемещение s2 равно:
При этом модуль перемещения в течение всего времени движения равен:
s = |s1 – s2|
Полный путь (обозначим его l), пройденный телом за оба этапа, равен:
l = s1 + s2
Пример №3. Мальчик пробежал из состояния покоя некоторое расстояние за 5 секунд с ускорением 1 м/с2. Затем он тормозил до полной остановки в течение 2 секунд с другим по модулю ускорением. Найти этот модуль ускорения, если его тормозной путь составил 3 метра.
В данном случае движение нужно разделить на два этапа, так как мальчик сначала разогнался, потом затормозил. Тормозной путь будет соответствовать второму этапу. Через него мы выразим ускорение:
Из первого этапа (разгона) можно выразить конечную скорость, которая послужит для второго этапа начальной скоростью:
v02 = v01 + a1t1 = a1t1 (так как v01 = 0)
Подставляем выраженные величины в формулу:

Перемещение в n-ную секунду прямолинейного равноускоренного движения
Иногда в механике встречаются задачи, когда нужно найти перемещение тела за определенный промежуток времени при условии, что тело начинало движение из состояния покоя. В таком случае перемещение определяется формулой:
За первую секунду тело переместится на расстояние, равное:
За вторую секунду тело переместится на расстояние, равное разности перемещения за 2 секунды и перемещения за 1 секунду:

За третью секунду тело переместится на расстояние, равное разности перемещения за 3 секунды и перемещения за 2 секунды:
Видно, что за каждую секунду тело проходит перемещение, кратное целому нечетному числу:

Из формул перемещений за 1, 2 и 3 секунду можно выявить закономерность: перемещение за n-ную секунду равно половине произведения модуля ускорения на (2n–1), где n — секунда, за которую мы ищем перемещение тела. Математически это записывается так:
Формула перемещения за n-ную секунду
Пример №4. Автомобиль разгоняется с ускорением 3 м/с2. Найти его перемещение за 6 секунду.
Подставляем известные данные в формулу и получаем:
Таким же способом можно найти перемещение не за 1 секунду, а за некоторый промежуток времени: за 2, 3, 4 секунды и т. д. В этом случае используется формула:
где t — время одного промежутка, а n — порядковый номер этого промежутка.
Пример №5. Ягуар ринулся за добычей с ускорением 2,5 м/с2. Найти его перемещение за промежуток времени от 4 до 6 секунд включительно.
Время от 4 до 6 секунд включительно — это 3 секунды: 4-ая, 5-ая и 6-ая. Значит, промежуток времени составляет 3 секунды. До наступления этого промежутка успело пройти еще 3 секунды. Значит, время от 4 до 6 секунд — это второй по счету временной промежуток.
Подставляем известные данные в формулу:

Проекция и график перемещения
Проекция перемещения на ось ОХ. График перемещения — это график зависимости перемещения от времени. Графиком перемещения при равноускоренном движении является ветка параболы. График перемещения при равноускоренном движении, когда вектор скорости направлен в сторону оси ОХ (v↑↑OX), а вектора скорости и ускорения сонаправлены (v↑↑a), принимает следующий вид:
График перемещения при равнозамедленном движении, когда вектор скорости направлен в сторону оси ОХ (v↑↑OX), а вектора скорости и ускорения противоположно (v↓↑a), принимает следующий вид:
Определение направления знака проекции ускорения по графику его перемещения:
- Если ветви параболического графика смотрят вниз, проекция ускорения тела отрицательна.
- Если ветви параболического графика смотрят вверх, проекция ускорения тела положительна.
Пример №6. Определить ускорение тела по графику его перемещения.

Перемещение тела в момент времени t=0 с соответствует нулю. Значит, ускорение можно выразить из формулы перемещения без начального ускорения. Получим:
Теперь возьмем любую точку графика. Пусть она будет соответствовать моменту времени t=2 с. Этой точке соответствует перемещение 30 м. Подставляем известные данные в формулу и получаем:
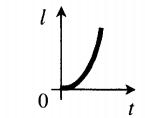
График пути
График пути от времени в случае равноускоренного движения совпадает с графиком проекции перемещения, так как s = l.
В случае с равнозамедленным движением график пути представляет собой линию, поделенную на 2 части:
- 1 часть — до момента, когда скорость тела принимает нулевое значение (v = 0). Эта часть графика является частью параболы от начала координат до ее вершины.
- 2 часть — после момента, при котором скорость тела принимает нулевое значение (v = 0). Эта часть является ветвью такой же, но перевернутой параболы. Ее вершина совпадает с вершиной предыдущей параболы, но ее ветвь направлена вверх.
Такой вид графика (возрастающий) объясняется тем, что путь не может уменьшаться — он либо не меняется (в состоянии покоя), либо растет независимо от того, в каком направлении, с какой скоростью и с каким ускорением движется тело.
Пример №7. По графику пути от времени, соответствующему равноускоренному прямолинейному движению, определить ускорение тела.
При равноускоренном прямолинейном движении графиком пути является ветвь параболы. Поэтому наш график — красный. График пути при равноускоренном прямолинейном движении также совпадает с графиком проекции его ускорения. Поэтому для вычисления ускорения мы можем использовать эту формулу:
Для расчета возьмем любую точку графика. Пусть она будет соответствовать моменту времени t=2 c. Ей соответствует путь, равный 5 м. Значит, перемещение тоже равно 5 м. Подставляем известные данные в формулу:
Задание EF18553
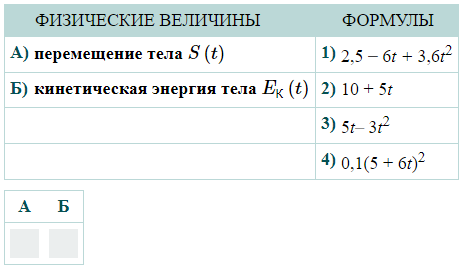 Тело массой 200 г движется вдоль оси Ох, при этом его координата изменяется во времени в соответствии с формулой х(t) = 10 + 5t– 3t2(все величины выражены в СИ).
Тело массой 200 г движется вдоль оси Ох, при этом его координата изменяется во времени в соответствии с формулой х(t) = 10 + 5t– 3t2(все величины выражены в СИ).
Установите соответствие между физическими величинами и формулами, выражающими их зависимости от времени в условиях данной задачи.
К каждой позиции первого столбца подберите соответствующую позицию из второго столбца и запишите в таблицу выбранные цифры под соответствующими буквами.
Алгоритм решения
1.Записать исходные данные и перевести их единицы измерения величин в СИ.
2.Записать уравнение движения тела при прямолинейном равноускоренном движении в общем виде.
3.Сравнить формулу из условия задачи с этим уравнением движения и выделить кинематические характеристики движения.
4.Определить перемещение тела и его кинетическую энергию.
5.Выбрать для физических величин соответствующую позицию из второго столбца таблицы и записать ответ.
Решение
Из условия задачи известна только масса тела: m = 200 г = 0,2 кг.
Так как тело движется вдоль оси Ox, уравнение движения тела при прямолинейном равноускоренном движении имеет вид:
x(t)=x0+v0t+at22
Теперь мы можем выделить кинематические характеристики движения тела:
• a/2 = –3 (м/с2), следовательно, a = –6 (м/с2).
Перемещение тела определяется формулой:
s=v0t+at22
Начальная координата не учитывается, так как это расстояние было уже пройдено до начала отсчета времени. Поэтому перемещение равно:
x(t)=v0t+at22=5t−3t2
Кинетическая энергия тела определяется формулой:
Ek=mv22
Скорость при прямолинейном равноускоренном движении равна:
v=v0+at=5−6t
Поэтому кинетическая энергия тела равна:
Ek=m(5−6t)22=0,22(5−6t)2=0,1(5−6t)2
Следовательно, правильная последовательность цифр в ответе будет: 34.
Ответ: 34
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18774
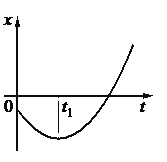
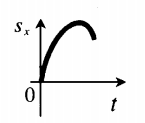
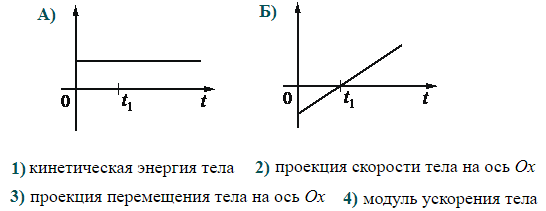
На рисунке показан график зависимости координаты x тела, движущегося вдоль оси Ох, от времени t (парабола). Графики А и Б представляют собой зависимости физических величин, характеризующих движение этого тела, от времени t. Установите соответствие между графиками и физическими величинами, зависимости которых от времени эти графики могут представлять.
К каждой позиции графика подберите соответствующую позицию утверждения и запишите в поле цифры в порядке АБ.
Алгоритм решения
- Определить, какому типу движения соответствует график зависимости координаты тела от времени.
- Определить величины, которые характеризуют такое движение.
- Определить характер изменения величин, характеризующих это движение.
- Установить соответствие между графиками А и Б и величинами, характеризующими движение.
Решение
График зависимости координаты тела от времени имеет вид параболы в случае, когда это тело движется равноускоренно. Так как движение тела описывается относительно оси Ох, траекторией является прямая. Равноускоренное прямолинейное движение характеризуется следующими величинами:
- перемещение и путь;
- скорость;
- ускорение.
Перемещение и путь при равноускоренном прямолинейном движении изменяются так же, как координата тела. Поэтому графики их зависимости от времени тоже имеют вид параболы.
График зависимости скорости от времени при равноускоренном прямолинейном движении имеет вид прямой, которая не может быть параллельной оси времени.
График зависимости ускорения от времени при таком движении имеет вид прямой, перпендикулярной оси ускорения и параллельной оси времени, так как ускорение в этом случае — величина постоянная.
Исходя из этого, ответ «3» можно исключить. Остается проверить ответ «1». Кинетическая энергия равна половине произведения массы тела на квадрат его скорости. Графиком квадратичной функции является парабола. Поэтому ответ «1» тоже не подходит.
График А — прямая линия, параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости ускорения от времени (или его модуля). Поэтому первая цифра ответа — «4».
График Б — прямая линия, не параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости скорости от времени (или ее проекции). Поэтому вторая цифра ответа — «2».
Ответ: 24
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18831
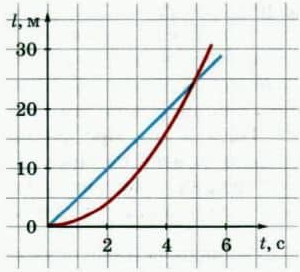
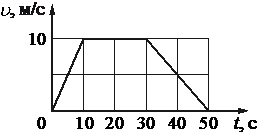
На рисунке представлен график зависимости модуля скорости υ автомобиля от времени t. Определите по графику путь, пройденный автомобилем в интервале времени от t1=20 с до t2=50 с.
Алгоритм решения
- Охарактеризовать движение тела на различных участках графика.
- Выделить участки движения, над которыми нужно работать по условию задачи.
- Записать исходные данные.
- Записать формулу определения искомой величины.
- Произвести вычисления.
Решение
Весь график можно поделить на 3 участка:
- От t1 = 0 c до t2 = 10 с. В это время тело двигалось равноускоренно (с положительным ускорением).
- От t1 = 10 c до t2 = 30 с. В это время тело двигалось равномерно (с нулевым ускорением).
- От t1 = 30 c до t2 = 50 с. В это время тело двигалось равнозамедленно (с отрицательным ускорением).
По условию задачи нужно найти путь, пройденный автомобилем в интервале времени от t1 = 20 c до t2 = 50 с. Этому времени соответствуют два участка:
- От t1 = 20 c до t2 = 30 с — с равномерным движением.
- От t1 = 30 c до t2 = 50 с — с равнозамедленным движением.
Исходные данные:
- Для первого участка. Начальный момент времени t1 = 20 c. Конечный момент времени t2 = 30 с. Скорость (определяем по графику) — 10 м/с.
- Для второго участка. Начальный момент времени t1 = 30 c. Конечный момент времени t2 = 50 с. Скорость определяем по графику. Начальная скорость — 10 м/с, конечная — 0 м/с.
Записываем формулу искомой величины:
s = s1 + s2
s1 — путь тела, пройденный на первом участке, s2 — путь тела, пройденный на втором участке.
s1 и s2 можно выразить через формулы пути для равномерного и равноускоренного движения соответственно:
Теперь рассчитаем пути s1 и s2, а затем сложим их:
s1 + s2 = 100 + 100 = 200 (м)
Ответ: 200
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 25.4k
