Момент
силы (синонимы: крутящий
момент, вращательный момент, вертящий
момент, вращающий момент) — векторная физическая
величина,
равная векторному
произведению радиус-вектора (проведённого
от оси вращения к точке приложения
силы — по определению), на вектор
этой силы. Характеризует вращательное
действие силы на твёрдое тело.
В физике момент
силы можно понимать как «вращающая
сила». В Международной
системе единиц (СИ) единицей
измерения момента силы является ньютон-метр.
Момент силы иногда называют моментом
пары сил, это понятие возникло в
трудахАрхимеда над
рычагами. В простейшем случае, если сила
приложена к рычагу перпендикулярно
ему, момент силы определяется как
произведение величины этой силы на
расстояние до оси вращения рычага.
Например, сила в 3 ньютона, приложенная
к рычагу на расстоянии 2 метров от его
оси вращения, создаёт такой же момент,
что и сила в 1 ньютон, приложенная к
рычагу на расстоянии 6 метров до оси
вращения. Более точно, момент силы
частицы определяется как векторное
произведение:
![]()
где ![]() —
—
сила, действующая на частицу,
а![]() —радиус-вектор частицы.
—радиус-вектор частицы.
Моме́нт
и́мпульса (кинетический
момент, угловой момент, орбитальный
момент, момент количества движения)
характеризует количествовращательного
движения.
Величина, зависящая от того,
сколько массы вращается,
как она распределена относительно оси
вращения и с какой скоростью
происходит вращение.
Замечание: момент
импульса относительно точки —
это псевдовектор,
а момент импульса относительно
оси — псевдоскаляр.
Момент
импульса замкнутой
системы сохраняется.
![]()
Момент
инерции — скалярная (в
общем случае — тензорная) физическая
величина,
мера инертности во вращательном
движении вокруг
оси, подобно тому, как масса тела является
мерой его инертности в поступательном
движении. Характеризуется распределением
масс в теле: момент инерции равен сумме
произведений элементарных масс на
квадрат их расстояний до базового
множества (точки, прямой или плоскости).
Единица
измерения в Международной
системе единиц (СИ): кг·м².
Обозначение: I или JМоментом
инерции механической
системы относительно
неподвижной оси («осевой момент инерции»)
называется величина Ja,
равная сумме произведений масс
всех n материальных
точек системы
на квадраты их расстояний до оси:
![]() ,
,
где: mi —
масса i-й
точки,
ri —
расстояние от i-й
точки до оси.
11.
Зако́н сохране́ния моме́нта и́мпульса (закон
сохранения углового момента) — один
из фундаментальных законов
сохранения.
Математически выражается через векторную
сумму всех моментов
импульса относительно
выбранной оси для замкнутой
системы тел и
остается постоянной, пока на систему
не воздействуют внешние силы. В
соответствии с этиммомент
импульса замкнутой
системы в любой системе координат не
изменяется со временем.
Закон
сохранения момента импульса есть
проявление изотропности
пространства относительно поворота.
В
упрощённом виде: ![]() ,
,
если система находится в равновесии.
16.Постулаты специальной теории относительности.
Специальная
теория относительности (СТО;
также частная
теория относительности) —
теория, описывающая движение,
законымеханики и
пространственно-временные отношения
при произвольных скоростях движения,
меньших скорости света в вакууме, в том
числе близких к скорости
света.
В рамках специальной теории
относительности классическая
механика Ньютона является
приближением низких скоростей. Обобщение
СТО для гравитационных полей
называется общей
теорией относительности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
| Момент импульса | |
|---|---|
 |
|
| Размерность | L2MT−1 |
| Единицы измерения | |
| СИ | м2·кг/с |
| СГС | см2·г/с |
| Примечания | |
| псевдовектор |
Моме́нт и́мпульса (момент импульса относительно точки, также: кинетический момент, угловой момент, орбитальный момент, момент количества движения) — физическая величина, характеризующая количество вращательного движения и зависящая от того, сколько массы вращается, как она распределена в пространстве и с какой угловой скоростью происходит вращение[1].
Для одной материальной точки момент импульса равен векторному произведению радиус-вектора точки на её импульс, для системы точек — сумме таких произведений. Стандартное обозначение: 
Момент импульса замкнутой системы сохраняется. Он является одним из трёх аддитивных (энергия, импульс, момент импульса) интегралов движения. При наличии внешних сил производная момента импульса по времени равна моменту сил (относительно того же начала O).
Основное использование понятия момента импульса относится к задачам, связанным с реальным вращением (особенно при наличии центральной или осевой симметрии; тогда О обычно выбирается в центре или на оси). Но величина
В случае вращения твёрдого тела вокруг фиксированной оси часто используется не сам момент импульса, а его проекция 
Понятие момента импульса было изначально введено в классической механике, но имеет обобщения в квантовой механике и электродинамике.
Момент импульса в классической механике[править | править код]

Связь между силой F, моментом силы τ, импульсом 

Определение[править | править код]
Момент импульса
,
где 

Из определения момента импульса следует его аддитивность: для системы, состоящей из нескольких материальных точек, выполняется
.
Количество частиц может быть бесконечным, например в случае твёрдого тела с распределённой массой.
Так как момент импульса задаётся векторным произведением, он является псевдовектором, перпендикулярным обоим векторам
Момент импульса можно вычислить относительно любого начала отсчета O (получающиеся при этом разные значения
Выбор точки O иногда связан с характером задачи. Так, при рассмотрении орбитального движения планеты вокруг Солнца за начало отсчёта естественно взять Солнце, а при анализе её же собственного вращения — центр этой планеты. Естественно, получатся два разных момента импульса: 

Вычисление в общем случае[править | править код]
Если имеется материальная точка массой 


.
Чтобы рассчитать момент импульса тела, его надо разбить на бесконечно малые кусочки 

.
На практике
.
Если считать, что 
Случай фиксированной оси[править | править код]
Важным случаем использования понятия «момент импульса» является движение вокруг неизменной оси. В такой ситуации часто рассматривают не сам момент импульса (псевдовектор), а его проекцию на ось как псевдоскаляр, знак которого зависит от направления вращения:
.
Параллельность-перпендикулярность (




.
Если при этом все точки тела движутся по окружностям (вращаются) с одинаковой угловой скоростью 

или
.
Величину 
Для абсолютно твёрдого тела, величина последнего интеграла называется моментом инерции относительно оси вращения и обозначается 


Сохранение момента импульса[править | править код]
Закон сохранения момента импульса: суммарный момент импульса относительно любой неподвижной точки для замкнутой системы остается постоянным со временем.
Производная момента импульса по времени есть момент силы:
,
Таким образом, требование замкнутости системы может быть ослаблено до требования равенства нулю главного (суммарного по всем частицам 
,
где 
По теореме Нётер закон сохранения момента импульса следует из изотропии пространства, то есть из инвариантности пространства по отношению к повороту на произвольный угол. При повороте на произвольный бесконечно малый угол 




С учётом 


Теперь, пользуясь свойством смешанного произведения, совершим циклическую перестановку векторов, в результате чего получим, вынося общий множитель:

где 


Смежные понятия[править | править код]
При рассмотрении задач, связанных с вращением, фигурируют понятия, частично упоминавшиеся выше:
- момент импульса относительно оси (термин состоит из четырёх слов) — проекция момента импульса на ось;
- момент инерции твёрдого тела (см. также моменты инерции некоторых тел);
- момент силы (он же: крутящий момент, вращательный момент, вертящий момент);
- импульс момента силы
(единица измерения — Н·м·с) — мера воздействия момента силы относительно данной оси за данный промежуток времени (во вращательном движении).
Несмотря на созвучность с «моментом импульса», эти понятия не синонимичны термину «момент импульса» и несут самостоятельный смысл.
Момент импульса в электродинамике[править | править код]
При описании движения заряженной частицы в электромагнитном поле канонический импульс 

где 



где 

Момент импульса в квантовой механике[править | править код]
Оператор момента[править | править код]
В квантовой механике момент импульса квантуется, то есть он может изменяться только по «квантовым уровням» между точно определёнными значениями. Проекция на любую ось момента импульса частиц, обусловленного их пространственным движением, должна быть целым числом, умноженным на 


Эксперименты показывают, что большинство частиц имеют постоянный внутренний момент импульса, который не зависит от их движения через пространство. Этот спиновый момент импульса всегда кратен 
В классическом определении момент импульса зависит от 6 переменных 





Математически полный момент импульса в квантовой механике определяется как оператор физической величины из суммы двух частей, связанных с пространственным движением — в атомной физике такой момент называют орбитальным, и внутренним спином частицы — соответственно, спиновым. Первый оператор действует на пространственные зависимости волновой функции:
,
где 

,
где 
,
где 
и даже более важные подстановки с гамильтонианом частицы без заряда и спина:
.
Симметрия вращения[править | править код]
Операторы момента импульса обычно встречаются при решении задач сферической симметрии в сферических координатах. Тогда момент импульса в пространственном отображении:

Когда находят собственные значения этого оператора, получают следующее:


где 

— сферические функции.

Примечания[править | править код]
- ↑ Pivarski, Jim Spin. Symmetry Magazine (март 2013). Дата обращения: 28 апреля 2014. Архивировано 15 апреля 2014 года.
- ↑ [Информация с сайта Нобелевского комитета (англ.). Дата обращения: 3 ноября 2017. Архивировано 18 мая 2008 года. Информация с сайта Нобелевского комитета (англ.)]
Литература[править | править код]
- Биденхарн Л., Лаук Дж. Угловой момент в квантовой физике. Теория и приложения. — М.: Мир, 1984. — Т. 1. — 302 с.
- Блохинцев Д. И. Основы квантовой механики. — М.: Наука, 1976. — 664 с.
- Боум А. Квантовая механика: основы и приложения. — М.: Мир, 1990. — 720 с.
- Варшалович Д. А., Москалев А. Н., Херсонский В. К. Квантовая теория углового момента. — Л.: Наука, 1975. — 441 с.
- Зар Р. Теория углового момента. О пространственных эффектах в физике и химии. — М.: Мир, 1993. — 352 с.
Связь между моментом импульса и моментом силы материальной точки
Она определяется через производную от момента импульса по времени:
Это основное уравнение динамики вращательного движения материальной точки
ЗАКОН ИЗМЕНЕНИЯ И СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
Рассмотрим систему материальных точек, которые взаимодействуют меж собой и подвержены воздействию извне. Результирующий момент сил, действующих на систему материальных точек, равен сумме моментов сил, действующих на отдельные точки. Общий момент сил внутреннего попарного взаимодействия равен нулю, поэтому изменение полного момента импульса системы материальных точек определяется только результирующим моментом внешних сил.Если система материальных точек является замкнутой, то полный момент импульса остается неизменным.
Момент импульса материальной точки относительно оси
Имеется существенное различие между понятиями момент импульса относительно материальной точки и относительно оси. Проекция момента импульса материальной точки относительно любой точки, лежащей на оси вращения, одинакова и обозначается как Lzo . Это и есть момент импульса материальной точки относительно оси. Если момент импульса материальной точки относительно точки является векторной величиной, то момент импульса относительно оси – это проекция на ось его момента относительно точки, лежащей на оси. Таким образом, момент импульса относительно оси уже не является векторной величиной.
Лекция №7
ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Вращательное движение твердого тела относительно неподвижной оси
Момент импульса твердого тела, вращающегося относительно неподвижной оси, можно представить как сумму моментов отдельных материальных точек, его составляющих. Поскольку всеDLi направлены вдоль оси вращения, суммарный момент импульса материальных точек твердого тела есть арифметическая суммаDLi
Переходя к угловой скорости вращения ω , одинаковой для всех DLi , получим: , где
–
Момент инерции служит мерой инертности твердого тела при вращательном движении, поскольку в данном случае инертность тела определяется не только его массой, но и ее распределением относительно оси вращения.
ОСНОВНОЕ УРАВНЕНИЕ ДИНАМИКИ ВРАЩАТЕЛЬНОГО
ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Как и в случае системы материальных точек для твердого тела, на которое не действуют внешние силы, момент импульса остается неизменным во времени
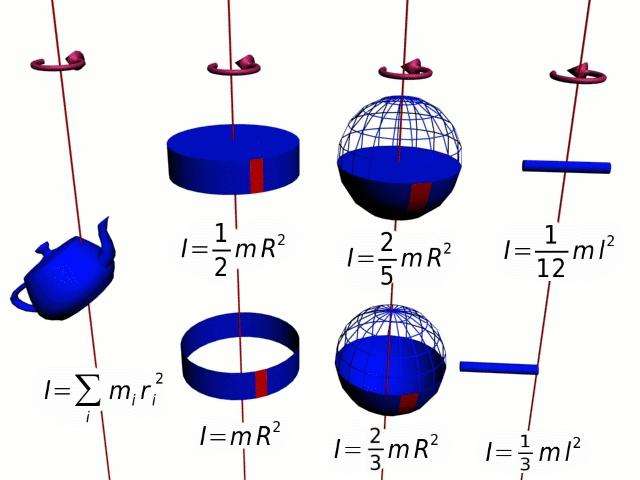
Моменты инерции различных по форме тел
Сплошной цилиндр или диск
Момент инерции стержня относительно оси, проходящей через его центр
Момент инерции шара относительно оси, проходящей через его центр
ТЕОРЕМА ШТЕЙНЕРА.
Теорема Штейнера устанавливает связь между моментом инерции твердого тела относительно оси, проходящей через центр масс, и любой другой осью, параллельной исходной
Момент инерции твердого тела относительно произвольной оси равен моменту инерции этого тела относительно оси, параллельной исходной, плюс произведение массы тела на квадрат расстояния между осями.
Примечание. Поскольку момент инерции J зависит как от массы, так и ее распределения относительно оси вращения, то J изменяется не только при смещении тела, но и его повороте относительно оси вращения.
РАБОТА И ЭНЕРГИЯ ПРИ ВРАЩАТЕЛЬНОМ ДВИЖЕНИИ
Работа, совершаемая при вращательном движении твердого тела относительно
неподвижной оси:
Кинетическая энергия твердого тела при вращательном движении относительно
неподвижной оси =
Если тело участвует одновременно во вращательном и поступательном движениях, то кинетическая энергия тела равна сумме энергии поступательного и вращательного движения:
ЭЛЕКТРОСТАТИКА
ЗАКОН СОХРАНЕНИЯ ЭЛЕКТРИЧЕСКОГО ЗАРЯДА
Уравнение моментов: моменты силы, импульса и инерции
Если линейное перемещение тел описывают в классической механике с помощью законов Ньютона, то характеристики движения механических систем по круговым траекториям вычисляют с помощью специального выражения, которое называется уравнением моментов. О каких моментах идет речь и в чем заключается смысл этого уравнения? Эти и другие вопросы раскрываются в статье.
Момент силы
Всем хорошо известна ньютоновская сила, которая, действуя на тело, приводит к сообщению ему ускорения. Когда же такая сила прилагается к объекту, который закреплен на некоторой оси вращения, то эту характеристику принято называть моментом силы. Уравнение момента силы может быть записано в следующем виде:
 Вам будет интересно: Эмфатические конструкции в английском языке: правила составления, особенности перевода
Вам будет интересно: Эмфатические конструкции в английском языке: правила составления, особенности перевода
Рисунок, поясняющий это выражение, приведен ниже.
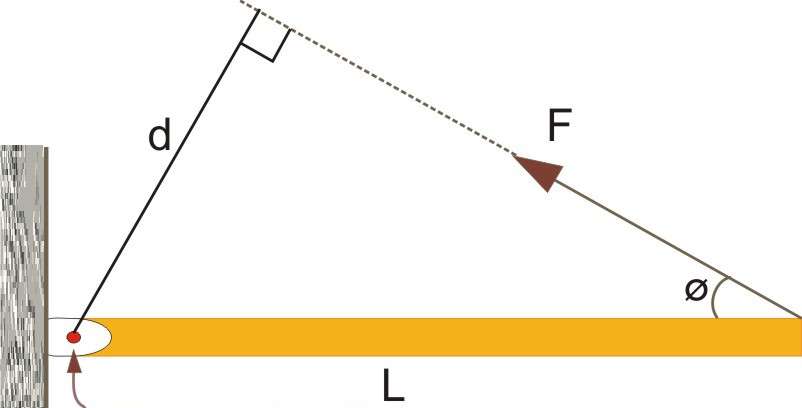
Здесь видно, что сила F¯ направлена к вектору L¯ под углом Φ. Сам же вектор L¯ полагается направленным от оси вращения (указана стрелкой) к точке приложения F¯.
 Вам будет интересно: Что такое дендриты и дендритные шипики
Вам будет интересно: Что такое дендриты и дендритные шипики
Приведенная выше формула представляет собой произведение двух векторов, поэтому величина M¯ также является направленной. Куда будет повернут момент силы M¯? Это можно определить по правилу правой руки (четыре пальца направлены вдоль траектории от конца вектора L¯ к концу F¯, а отставленный палец большой показывает направление M¯).
На рисунке выше выражение для момента силы в скалярном виде примет форму:
Если внимательно всмотреться в рисунок, то можно увидеть, что L*sin(Φ) = d, тогда имеем формулу:
Величина d является важной характеристикой при вычислении момента силы, поскольку она отражает эффективность приложенной F к системе. Эту величину принято называть рычагом силы.
Физический смысл M заключается в способности силы совершить вращение системы. Эту способность может ощутить на себе каждый, если будет открывать дверь за ручку, толкая ее около петель, или же попробует открутить гайку коротким и длинным ключом.
Равновесие системы
Понятие о моменте силы оказывается очень полезным, когда рассматривают равновесие системы, на которую действуют несколько сил, и которая имеет ось или точку вращения. В таких случаях применяют формулу:
То есть система будет находиться в равновесии, если сумма всех моментов сил, приложенных к ней, нулевая. Заметим, что в этой формуле присутствует знак вектора над моментом, то есть при решении следует не забывать учитывать знак этой величины. Общепринятым правилом считается, что действующая сила, которая вращает систему против часовой стрелки, создает положительный Mi¯.

Ярким примером задач рассматриваемого типа являются проблемы с равновесием рычагов Архимеда.
Момент импульса
Это еще одна важная характеристика движения по окружности. В физике ее описывают произведением количества движения на рычаг. Уравнение момента импульса имеет такой вид:
Здесь p¯ – вектор импульса, r¯ – вектор, соединяющий вращающуюся материальную точку с осью.
Поясняющий это выражение рисунок приведен ниже.
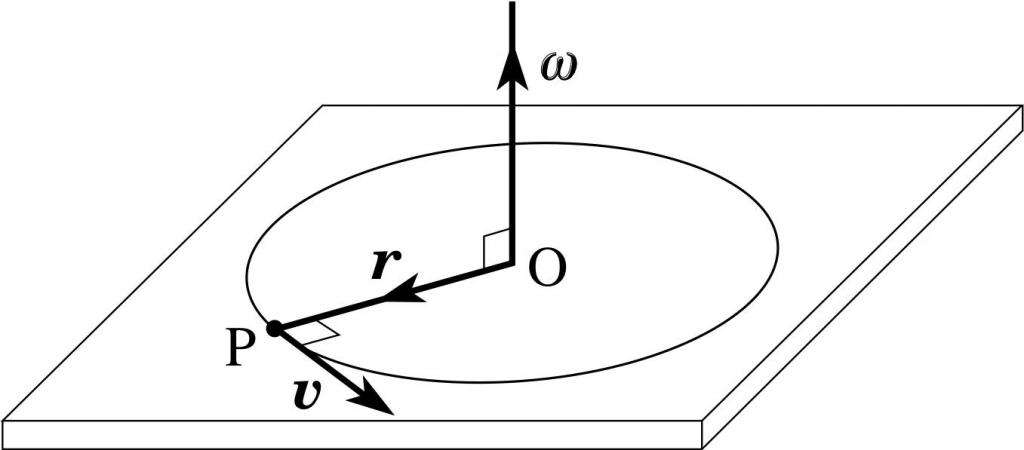
Здесь ω – угловая скорость, которая дальше появится в уравнении моментов. Заметим, что направление вектора T¯ находится по тому же правилу, что и M¯. На рисунке выше T¯ по направлению будет совпадать с вектором угловой скорости ω¯.
Физический смысл величины T¯ является таким же, как и характеристики p¯ в случае линейного движения, то есть момент импульса описывает количество вращательного движения (запасенную кинетическую энергию).
Момент инерции
Третья важная характеристика, без которой невозможно составить уравнение движения вращающегося объекта, – это момент инерции. Появляется он в физике в результате математических преобразований формулы для момента импульса материальной точки. Покажем, как это делается.
Представим величину T¯ в следующем виде:
T¯ = r¯*m*v¯, где p¯ = m*v¯
Пользуясь связью между угловой и линейной скоростями, можно переписать это выражение следующим образом:
T¯ = r¯*m*r¯*ω¯, где v¯ = r¯*ω¯
Последнее выражение запишем в виде:
Величина r2*m – это момент инерции I для точки массой m, которая совершает круговое движение вокруг оси на расстоянии от нее r. Этот частный случай позволяет ввести общее уравнение момента инерции для тела произвольной формы:
I – это аддитивная величина, смысл которой заключается в инерционности вращающейся системы. Чем больше I, тем труднее раскрутить тело, и необходимо приложить значительные усилия, чтобы его остановить.
Уравнение моментов
Мы рассмотрели три величины, название которых начинается со слова “момент”. Это сделано было намеренно, поскольку все они связаны в одно выражение, получившее название уравнения 3 моментов. Выведем его.
Рассмотрим выражение для момента импульса T¯:
Найдем, как изменяется величина T¯ во времени, имеем:
Учитывая, что производная угловой скорости равна таковой для скорости линейной, деленной на r, а также раскрывая величину I, приходим к выражению:
dT¯/dt = m*r2*1/r*dv¯/dt = r*m*a¯, где a¯ = dv¯/dt – линейное ускорение.
Заметим, что произведение массы на ускорение – это не что иное, как действующая внешняя сила F¯. В итоге получаем:
Мы пришли к интересному выводу: изменение момента импульса равно моменту действующей внешней силы. Это выражение принято записывать в несколько иной форме:
M¯ = I*α¯, где α¯ = dω¯/dt – угловое ускорение.
Это равенство называется уравнением моментов. Оно позволяет рассчитать любую характеристику вращающегося тела, зная параметры системы и величину внешнего воздействия на нее.
Закон сохранения T¯
Полученный в предыдущем пункте вывод свидетельствует о том, что если внешний момент сил будет равен нулю, то момент импульса меняться не будет. В таком случае запишем выражение:
T¯ = const. или I1*ω1¯ = I2*ω2¯
Эта формула носит название закона сохранения величины T¯. То есть любые изменения внутри системы суммарный момент импульса не меняют.
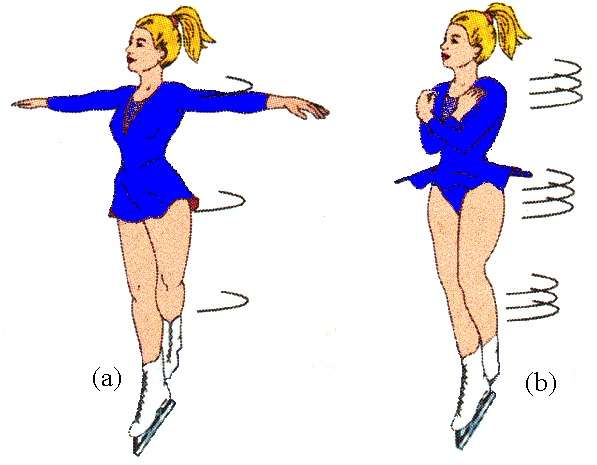
Этот факт используется фигуристами и балеринами во время их выступлений. Также его применяют, если необходимо выполнить поворот вокруг своей оси искусственного спутника, движущегося в космосе.
Момент силы и момент импульса.
Вращение является составляющей большинства рассматриваемых в механике движений. Каждый день мы являемся свидетелями великого космического вращения. Данные последних теоретических исследований говорят, что всё вокруг и мы сами по свойствам напоминаем вращающиеся с большой частотой поля.
Динамические характеристики – момент силы и момент импульса, используемые при описании вращательного движения, играют в теории вращательного движения такую же большую роль, какую сила и импульс играют в динамике поступательного движения.
Известно, что передвинуть массивный предмет (например, ящик) вручную тяжело, гораздо легче передвинуть его с помощью длинной палки, трубы (лома), т.е. перекантовать с помощью рычага, причем, чем длинней этот рычаг, тем легче это сделать (прикладывается меньшая сила при большей длине рычага (см. рис. 4.8)). Вспомним знаменитое изречение Архимеда (ок. 286–212 гг. до н.э.): «Дайте мне точку опоры (и рычаг) и я переверну Землю».
Другой пример – взвешивание предметов на весах (см. рис. 4.9): при равных плечах (силы) весов li перевесит тот груз, масса которого mi больше, а если массы грузов равны, то перевесит груз, для которого плечо силы li больше.
Следует различать момент силы и момент импульса относительно точки и относительно оси, в первом случае – это вектора, а во втором – проекции векторов (скаляры).
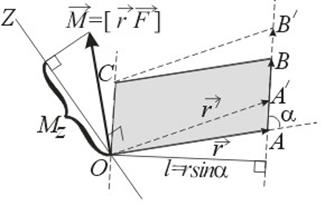
Пусть дана точка О (полюс), относительно которой находится момент силы. Моментом силы  относительно точки О называется векторное произведение (вектор) радиуса-вектора
относительно точки О называется векторное произведение (вектор) радиуса-вектора  , проведенного из точки О в точку А приложения силы на вектор:
, проведенного из точки О в точку А приложения силы на вектор:
 (4.16)
(4.16)
Модуль момента силы:
 , (4.17)
, (4.17)
где l=rsina – кратчайшее расстояние до линии АВ действия силы (рис.4.10), называемое плечом силы l.
При этом вектор  не изменится, если точку приложения силы перенести в любую другую точку, расположенную на линии действия силы, например в точку А / . При этом параллелограмм ОАВС перейдет в параллелограмм ОА / В / С. Оба параллелограмма имеют одинаковые основание и высоту, а следовательно, и площадь.
не изменится, если точку приложения силы перенести в любую другую точку, расположенную на линии действия силы, например в точку А / . При этом параллелограмм ОАВС перейдет в параллелограмм ОА / В / С. Оба параллелограмма имеют одинаковые основание и высоту, а следовательно, и площадь.
В отличие от полярных векторов  (именно их изучают в школе), вектора, характеризующие вращательное движение
(именно их изучают в школе), вектора, характеризующие вращательное движение  , не имеют конкретной точки приложения (см. также лекция 1, п.1), их называют скользящими. Так, вектор можно откладывать от любой точки параллельно одному из направлений, полученному в результате векторного произведения (по свойствам векторного произведения перпендикулярно плоскости, в которой лежат два перемножаемых вектора –
, не имеют конкретной точки приложения (см. также лекция 1, п.1), их называют скользящими. Так, вектор можно откладывать от любой точки параллельно одному из направлений, полученному в результате векторного произведения (по свойствам векторного произведения перпендикулярно плоскости, в которой лежат два перемножаемых вектора –  ), направление вектора совпадает с направлением поступательного движения правого винта при его вращении от вектора к (в математике термин – «левая тройка»).
), направление вектора совпадает с направлением поступательного движения правого винта при его вращении от вектора к (в математике термин – «левая тройка»).
Главным моментом нескольких внешних сил,действующих на систему, относительно точки О называется сумма моментов их относительно этой точки (принцип независимости действия сил):
 , (4.18)
, (4.18)
где силы  считают приложенными к одной точке О, что можно получить путем параллельного переноса векторов (часто в механике для удобства при решении задач силы рассматривают как приложенные к центру масс тела, хотя это не для всех сил так, пример – сила трения
считают приложенными к одной точке О, что можно получить путем параллельного переноса векторов (часто в механике для удобства при решении задач силы рассматривают как приложенные к центру масс тела, хотя это не для всех сил так, пример – сила трения  приложена к поверхности тела).
приложена к поверхности тела).
При вращении ТТ (системы материальных точек) необходимо учитывать только внешние силы,так как внутренние силы взаимодействия двух любых элементов ТТ (системы) всегда равны по модулю (величине) и противонаправлены вдоль одной прямой (их векторная (геометрическая) сумма равна нулю).
Аналогично вышесказанному можно определить момент импульса относительно точки (вектор  ) и относительно оси (проекция вектора Lz):
) и относительно оси (проекция вектора Lz):
 , (4.19)
, (4.19)
где  – импульс (материальной) точки А,
– импульс (материальной) точки А,  . Важно отметить, что моментом импульса относительно точки может обладать и тело, движущееся поступательно (достаточно наличие импульса и плеча). Тело, обладающее импульсом, может не обладать моментом импульса относительно одних точек (в отсутствие плеча) и обладать относительно других.
. Важно отметить, что моментом импульса относительно точки может обладать и тело, движущееся поступательно (достаточно наличие импульса и плеча). Тело, обладающее импульсом, может не обладать моментом импульса относительно одних точек (в отсутствие плеча) и обладать относительно других.
Единицы измерения[М]=Н×м (не путать с [А]=Дж=Н×м), а  .
.
В общем случае  (неколлинеарна) и , т.е. и
(неколлинеарна) и , т.е. и  , но если полюс (точка) О неподвижен, то импульс
, но если полюс (точка) О неподвижен, то импульс  точки А сонаправлен с ее скоростью
точки А сонаправлен с ее скоростью  , тогда:
, тогда:
 ,
,
т.к.  ,
,
то есть получают основное уравнение динамики вращательного движения:
 . (4.20)
. (4.20)
Этот закон остается справедливым и для системы материальных точек, в этом случае
 и
и  . (4.21)
. (4.21)
Особенность вращения ТТ, по сравнению с системой несвязанных друг с другом материальных точек, заключается в том, что при вращении ТТ вокруг неподвижной оси все его элементы движутся по окружностям, причем угловая скорость вращения  для них одинакова (а линейная различная). Поэтому естественным будет выразить вектор через скорость .
для них одинакова (а линейная различная). Поэтому естественным будет выразить вектор через скорость .
Разобьем ТТ (рис. 4.11), вращающееся относительно оси ОО / , на элементы (материальные точки). Момент импульса каждого элемента
 .
.
С учетом равенства 
 .
.
В математике известно, что двойное векторное произведение имеет вид
 ,
,
т.е.  .
.
 , (4.22)
, (4.22)
где DIi – момент инерции i–го элемента.
Суммируя (интегрируя) по всем элементам, получают:
 . (4.23)
. (4.23)
С учетом формул (4.20) и (4.23) получаем еще одну форму записи основного уравнения динамики вращательного движения:
 , (4.24)
, (4.24)
где e – угловое ускорение.
При вращении ТТ (системы материальных точек) необходимо учитывать только внешние силы,так как внутренние силы взаимодействия двух любых элементов ТТ (системы) всегда равны по модулю (величине) и противонаправлены вдоль одной прямой (их векторная (геометрическая) сумма равна нулю). Согласно уравнению (4.21) для замкнутой системы имеем:
 , (4.25)
, (4.25)
т.е.  .
.
Значит,для замкнутых систем выполняется закон сохранения момента импульса.
[spoiler title=”источники:”]
http://1ku.ru/obrazovanie/28956-uravnenie-momentov-momenty-sily-impulsa-i-inercii/
http://helpiks.org/3-35417.html
[/spoiler]
