Уравнение вынужденных колебаний и его решение. Резонанс.
Потери
механической энергии в любой колебательной
системе из-за
наличия сил трения неизбежны, поэтому
без «подкачки» энергии извне колебания
будут затухающими. Существует несколько
принципиально различных способов
создания колебательных систем незатухающих
колебаний. Остановимся более подробно
на рассмотрении незатухающих
колебаний под действием внешней
периодической силы.
Такие колебания называются
вынужденными.
Продолжим изучение
движения гармонического маятника (рис.
6.9 ).

рис.
6.9
Помимо
рассмотренных ранее сил упругости и
вязкого трения, на шарик действует
внешняя
вынуждающая
периодическая сила, изменяющаяся по
гармоническому закону
![]()
частота,
которой может отличаться от собственной
частоты колебаний маятника ωo.
Природа
этой сил в данном случае нам не существенна.
Создать такую силу можно различными
способами, например, сообщить шарику
электрический заряд и поместить его во
внешнее переменное электрическое
поле.
Уравнение движения шарика в
рассматриваемом случае имеет вид
![]()
Разделим
его на массу шарика и используем прежние
обозначения параметров системы. В
результате получим
уравнение
вынужденных колебаний:
![]()
где
fo
= Fo/m
− отношение амплитудного значения
внешней вынуждающей силы к массе
шарика.
Общее решение уравнения (3)
достаточно громоздко и, конечно, зависит
от
начальных условий. Характер движения
шарика, описываемого уравнением (3),
понятен: под действием вынуждающей силы
возникнуть колебания, амплитуда которых
будет возрастать. Этот переходный режим
достаточно сложен и зависит от начальных
условий. По прошествии некоторого
промежутка времени колебательный режим
установится, их амплитуда перестанет
изменяться. Именно установившийся
режим колебаний,
во многих случаях представляет основной
интерес. Мы не будем рассматривать
переход системы к установившемуся
режиму, а сконцентрируем внимание на
описании и изучении характеристик этого
режима.
При такой постановке задачи
нет необходимости задавать начальные
условия, так как интересующий нас
установившийся режим не зависит от
начальных условий, его характеристики
полностью определяются самим уравнением.
С
аналогичной ситуацией мы сталкивались
при изучении движения тела под действием
постоянной внешней силы и силы вязкого
трения
![]()
По
прошествии некоторого времени тело
движется с постоянной установившейся
скоростью
v
= Fo/β,
которая не зависит от начальных условий,
и полностью определяется уравнением
движения. Начальные условия определяют
режим, переходный к установившемуся
движению.
На основании здравого смысла
разумно предположить, что в установившемся
режиме колебаний шарик будет колебаться
с частотой внешней вынуждающей силы.
Поэтому решение уравнения (3) следует
искать в гармонической функции с частотой
вынуждающей силы.
Для начала решим
уравнение (3), пренебрегая силой
сопротивления
![]()
Попробуем
найти его решение в виде гармонической
функции
![]()
Для
этого вычислим зависимости скорости и
ускорения тела от времени, как производные
от закона движения
![]()
и
подставим их значения в уравнение (4)
![]()
Теперь
можно сократить на
cosωt.
Следовательно, это выражение обращается
в верное тождество в любой момент
времени, при выполнении условия
![]()
Таким
образом, наше предположение о решении
уравнения (4) в виде (5)
оправдалось: установившийся режим
колебаний описывается функцией
![]()
Отметим,
что коэффициент A
согласно полученному выражению (6) может
быть, как положительным (при ω
< ωo),
так и отрицательным (при ω
> ωo).
Изменение знака соответствует изменению
фазы колебаний на π
(причина такого изменение будет выяснена
чуть позже), поэтому амплитудой колебаний
является модуль этого коэффициента
|A|.
Амплитуда
установившихся колебаний, как и следовало
ожидать,
пропорциональна
величине вынуждающей силы. Кроме того,
эта амплитуда сложным образом зависит
от частоты вынуждающей силы. Схематический
график этой зависимости показан на рис.
6.10

Рис.
6.10 Резонансная кривая
Как
следует из формулы (6) и хорошо видно на
графике, при приближении
частоты вынуждающей силы к собственной
частоте системы амплитуда резко
возрастает. Причина такого возрастания
амплитуды понятна: вынуждающая сила
«во время» подталкивает шарик, при
полном совпадении частот установившейся
режим отсутствует − амплитуда возрастает
до бесконечности. Конечно, на практике
такого бесконечного возрастания
наблюдать невозможно: во-первых,
это может привести к разрушению самой
колебательной системы, во-вторых,
при больших амплитудах колебаний нельзя
пренебрегать силами сопротивления
среды.
Резкое
возрастание амплитуды вынужденных
колебаний при приближении частоты
вынуждающей силы к собственной частоте
колебаний системы называется явлением
резонанса.
Приступим
теперь к поиску решения уравнения
вынужденных колебаний с учетом силы
сопротивления
![]()
Естественно,
что и в этом случае решение следует
искать в виде
гармонической функции с частотой
вынуждающей силы. Легко заметить, что
поиск решения в форме (5) в данном случае
не приведет к успеху. Действительно,
уравнение (8), в отличие от уравнения
(4), содержит скорость частицы, которая
описывается функцией синуса. Поэтому,
временная часть в уравнении (8) не
сократится. Следовательно, решение
уравнения (8) следует представить в общей
форме гармонической функции
![]()
в
которой два параметра Ao
и φ
необходимо найти с помощью уравнения
(8). Параметр Ao
является амплитудой вынужденных
колебаний, φ
− сдвиг фаз между изменяющейся координатой
и переменной вынуждающей силой. Используя
тригонометрическую формулу для косинуса
суммы, функцию (9) можно представить в
эквивалентной форме
![]()
которая
также содержит два параметра B
= Aocosφ
и C
= −Aosinφ,
подлежащих определению. Используя
функцию (10), запишем явные выражения для
зависимостей скорости и ускорения
частицы от времени

и
подставим в уравнение (8):
![]()
Перепишем
это выражение в виде
![]()
Для
того чтобы равенство (13) выполнялось в
любой момент времени
необходимо, чтобы коэффициенты при
косинусе и синусе были равны нулю. На
основании этого условия получаем два
линейных уравнения для определения
параметров функции (10):
![]()
Решение
этой системы уравнений имеет вид
На
основании формулы (10) определяем
характеристики вынужденных колебаний:
амплитуду
![]()
сдвиг
фаз
![]()
При
малом затухании эта зависимость имеет
резкий максимум при приближении частоты
вынуждающей силы ω
к собственной частоте системы ωo.
Таким образом, и в этом случае возможно
возникновения резонанса, поэтому
построенные зависимости часто называют
резонансной кривой. Учет слабого
затухания показывает, что амплитуда не
возрастает до бесконечности, ее
максимальное значение зависит от
коэффициента затухания − с возрастанием
последнего максимальная амплитуда
быстро убывает.
Полученная зависимость
амплитуды колебаний от частоты вынуждающей
силы (16) содержит слишком много независимых
параметров ( fo,
ωo,
γ)
для того, чтобы построить полное семейство
резонансных кривых. Как и во многих
случаях, эту зависимость можно существенно
упростить, перейдя к «безразмерным»
переменным. Преобразуем формулу (16) к
следующему виду

и
обозначим
![]()
− относительная
частота (отношение частоты вынуждающей
силы к собственной частоте колебаний
системы);
![]()
− относительная
амплитуда (отношение амплитуды колебаний
к величине отклонения Ao
= f/ωo2
при нулевой частоте);
![]()
−
безразмерный параметр,
определяющий величину затухания.
Используя эти обозначения, функция (16)
существенно упрощается
так
как содержит всего один параметр −
δ.
Однопараметрическое
семейство резонансных кривых, описываемых
функцией
(16 б) может быть построено, особенно
легко с помощью компьютера. Результат
такого построения показан на рис. 629.

рис.
6.11
Отметим,
что переход к «обычным» единицам
измерения может быть проведен элементарным
изменением масштаба осей координат.
Следует
отметить, что частота вынуждающей силы,
при которой амплитуда
вынужденных колебаний максимальна,
также зависит от коэффициента затухания,
слегка убывая с ростом последнего.
Наконец, подчеркнем, что увеличение
коэффициента затухания приводит к
существенному увеличению ширины
резонансной кривой.
Возникающий сдвиг
фаз между колебаниями точки и вынуждающей
силой также
зависит от частоты колебаний и коэффициента
их затухания. Более подробно с ролью
этого сдвига фаз мы познакомимся при
рассмотрении преобразования энергии
в процессе вынужденных колебаний.
частота
свободных незатухающих колебаний
совпадает с собственной частотой,
частота затухающих колебаний немного
меньше собственной, а частота вынужденных
колебаний совпадает с частотой вынуждающей
силы, а не собственной частотой.
Вынужденные
электромагнитные колебания
Вынужденными
называются
такие колебания, которые происходят в
колебательной системе под влиянием
внешнего периодического воздействия.

Рис.6.12.
Контур с вынужденными электрическими
колебаниями
Рассмотрим
процессы, протекающие в электрическом
колебательном контуре (рис.6.12),
присоединенном к внешнему источнику,
ЭДС которого изменяется по гармоническому
закону
![]() ,
,
г деm
деm
– амплитуда внешней ЭДС,
– циклическая
частота ЭДС.
Обозначим
через UC
напряжение на конденсаторе, а через i
–
силу тока в контуре. В этом контуре кроме
переменной ЭДС (t)
действует еще ЭДС самоиндукции L
в катушке индуктивности.
ЭДС
самоиндукции прямо пропорциональна
скорости изменения силы тока в контуре
![]() .
.
Для
вывода дифференциального
уравнения вынужденных колебаний
возникающих
в таком контуре используем второе
правило Кирхгофа
![]() .
.
Напряжение
на активном сопротивлении R
найдем по закону Ома
![]() .
.
Cила
электрического тока равна заряду
протекающему за единицу времени через
поперечное сечение проводника
![]() .
.
Следовательно
![]() .
.
Напряжение
UC
на конденсаторе прямо пропорционально
заряду на обкладках конденсатора
![]() .
.
ЭДС
самоиндукции можно представить через
вторую производную от заряда по времени
![]() .
.
Подставляя
напряжения и ЭДС во второе правило
Кирхгофа
![]() .
.
Разделив
обе части этого выражения на L
и распределив слагаемые по степени
убывания порядка производной, получим
дифференциальное уравнение второго
порядка
![]() .
.
Введем
следующие обозначения и получим
![]() –коэффициент
–коэффициент
затухания,
![]() –циклическая
–циклическая
частота собственных колебаний контура.
![]() .
.
(1)
Уравнение
(1) является неоднородным
линейным дифференциальным уравнением
второго порядка. Такого типа уравнения
описывают поведение широкого класса
колебательных систем (электрических,
механических) под влиянием внешнего
периодического воздействия (внешней
ЭДС или внешней силы).
Общее
решение уравнения (1) складывается из
общего решения q1
однородного
дифференциального уравнения (2)
![]() (2)
(2)
и
любого частного решения q2
неоднородного
уравнения (1)
![]() .
.
Вид
общего решения однородного
уравнения
(2) зависит от величины коэффициента
затухания .
Нас будет интересовать случай слабого
затухания
<< 0.
При этом общее решение уравнения (2)
имеет вид
![]() ,
,
(3)
где
B
и 0
– постоянные, задаваемые начальными
условиями.
Решение
(3) описывает затухающие колебания в
контуре. Входящие в (3) величины:
![]() –циклическая
–циклическая
частота затухающих колебаний;
![]() –амплитуда
–амплитуда
затухающих колебаний;
![]() –фаза
–фаза
затухающих колебаний.
Частное
решение уравнения (1) ищем в виде
гармонического колебания, происходящего
с частотой, равной частоте
внешнего периодического воздействия
– ЭДС, и отстающего по фазе на
от него
![]() ,
,
(4)
где
![]() – амплитуда вынужденных колебаний,
– амплитуда вынужденных колебаний,
зависящая от частоты.
Подставим
(4) в (1) и получим тождество

Чтобы
сравнить фазы колебаний, используем
тригонометрические формулы приведения
![]() ,
,
![]() .
.
Тогда
наше уравнение перепишется в виде

Представим
колебания в левой части полученного
тождества в виде векторной
диаграммы
(рис.6.13)..
Третье
слагаемое, соответствующее колебаниям
на емкости С,
имеющее фазу (t
– )
и амплитуду
![]() ,
,
изобразим горизонтальным вектором,
направленным вправо.

Рис.6.13.
Векторная диаграмма
Первое
слагаемое левой части, соответствующие
колебаниям на индуктивности L,
изобразится на векторной диаграмме
вектором, направленным горизонтально
влево (его амплитуда
![]() ).
).
Второе
слагаемое, соответствующие колебаниям
на сопротивлении R,
изобразим вектором, направленным
вертикально вверх (его амплитуда
![]() ),
),
т. к. его фаза на/2
отстает от фазы первого слагаемого.
Так
как сумма трех колебаний слева от знака
равно дает гармоническое колебание
![]() ,
,
то векторная сумма на диаграмме (диагональ
прямоугольника) изображает колебание
с амплитудой![]() и фазойt,
и фазойt,
которая на
опережает фазу колебаний третьего
слагаемого.
Из
прямоугольного треугольника по теореме
Пифагора можно найти амплитуду A()
 (5)
(5)
и
tg
как отношение противолежащего катета
к прилежащему катету.
![]() .
.
(6)
Следовательно,
решение (4) с учетом (5) и (6) примет вид
 .
.
(7)
Общее
решение дифференциального уравнения
(1) является суммой q1
и q2
 .
.
(8)
Формула
(8) показывает, что при воздействии на
контур периодической внешней ЭДС в нем
возникают колебания двух частот, т.е.
незатухающие колебания с частотой
внешней ЭДС
и затухающие колебания с частотой
![]() .
.
Амплитуда затухающих колебаний![]() со временем становится пренебрежимо
со временем становится пренебрежимо
малой, и в контуре остаются только
вынужденные колебания, амплитуда которых
не зависит от времени. Следовательно,
установившиеся вынужденные колебания
описываются функцией (4). То есть в контуре
возникают вынужденные гармонические
колебания, с частотой, равной частоте
внешнего воздействия, и амплитудой![]() ,
,
зависящей от этой частоты (рис.3а)
по закону (5). При этом по фазе вынужденное
колебание отстает на
от вынуждающего воздействия.
Продифференцировав
выражение (4) по времени, найдем силу
тока в контуре
![]() ,
,
где
![]() – амплитуда силы тока.
– амплитуда силы тока.
Запишем
это выражение для силы тока в виде
![]() ,
,
(9)
где
![]() –сдвиг
–сдвиг
по фазе между током и внешней ЭДС.
В
соответствии с (6) и рис.2
![]() .
.
(10)
Из
этой формулы следует, что сдвиг по фазе
между током и внешней ЭДС зависит, при
постоянном сопротивлении R,
от соотношения между частотой вынуждающей
ЭДС
и собственной частотой контура 0.
Если
< 0,
то сдвиг по фазе между током и внешней
ЭДС
< 0. Колебания силы тока опережают
колебания ЭДС по фазе на угол .
Если
> 0,
тогда
> 0. Колебания силы тока отстают от
колебаний ЭДС по фазе на угол .
Если
= 0
(резонансная
частота),
то
= 0, т. е. сила тока и ЭДС колеблются в
одинаковой фазе.


Резонанс
– это
явление резкого возрастания амплитуды
колебаний при совпадении частоты
внешней, вынуждающей силы с собственной
частотой колебательной системы.
При
резонансе
= 0
и период колебаний
![]() .
.
Учитывая,
что коэффициент затухания
![]() ,
,
получим
выражения для добротности при резонансе
Т
= Т0
![]() ,
,
с
другой стороны
![]() .
.
Амплитуды
напряжений на индуктивности и емкости
при резонансе можно выразить через
добротность контура
![]() ,
,
(15)
![]() .
.
(16)
Из
(15) и (16) видно, что при
= 0,
амплитуда напряжения на конденсаторе
и индуктивности в Q
раз больше амплитуды внешней ЭДС. Это
свойство последовательного RLC
контура используется для выделения
радиосигнала определенной частоты
![]() из спектра радиочастот при перестройке
из спектра радиочастот при перестройке
радиоприемника.
На
практике RLC
контура связаны с другими контурами,
измерительными приборами или усилительными
устройствами, вносящими дополнительное
затухание в RLC
контур. Поэтому реальная величина
добротности нагруженного RLC
контура оказывается ниже величины
добротности, оцениваемой по формуле
![]() .
.
Реальная
величина добротности может быть оценена
как

Рис.6.14.
Определение добротности по резонансной
кривой
![]() ,
,
где
f
– ширина полосы частот, в которых
амплитуда составляет 0,7 от максимального
значения (рис.4).
Напряжения
на конденсаторе UC,
на активном сопротивлении UR
и на катушке индуктивности UL
достигают максимума при различных
частотах, соответственно
![]() ,
,
![]() ,
, .
.
Если
затухание мало 0
>> ,
то все эти частоты практически совпадают
и можно считать что
![]() .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Для школьников.
Продолжаем рассматривать механические колебания.
Ранее говорилось, если колебательная система выведена из положения равновесия и если сопротивлением среды колебаниям можно пренебречь, то колебательная система (математический маятник, пружинный маятник и т. д.) будет совершать свободные незатухающие колебания.
Их называют ещё собственными, синусоидальными, гармоническими. Графически такие колебания изображаются синусоидой.
Если силы сопротивления среды велики (например, колебания происходят в воде, масле и т. д.), то со временем амплитуда колебаний уменьшается. Такие колебания называются затухающими.
Сейчас рассмотрим случай, когда на колебательную систему, кроме силы сопротивления среды, действует внешняя сила, меняющаяся по гармоническому закону:
Возникшие при этом колебания называются вынужденными.
Здесь
есть амплитуда внешней (вынуждающей) силы, а
есть круговая частота колебаний вынуждающей силы.
Вынужденные колебания можно получить, например, с помощью показанной ниже установки.
Пружинный маятник через нить подвешен в точке небольшого изгиба стержня, который с помощью ручки может вращаться в подшипниках. Длина нити много больше изгиба стержня.
При равномерном вращении ручки (с постоянной круговой частотой) на пружинный маятник будет действовать гармоническая сила той же частоты:
Зададимся вопросом: как при этом будет двигаться груз на пружине?
Прежде надо сказать, что груз с пружиной (пружинный маятник), как и любая колебательная система, имеет собственную частоту колебаний
которая зависит только от свойств самой колебательной системы (массы, упругих свойств, размеров и т. д.).
(Почти у любого тела и любой конструкции есть её собственные колебания, часто они очень сложны. У сложного механического тела может быть много собственных колебаний, а значит и собственных частот).
Вернёмся к нашему пружинному маятнику.
Вынуждающая гармоническая сила, действующая на маятник при вращении стержня, будет навязывать маятнику свою частоту. заставляя пружинный маятник совершать вынужденные колебания.
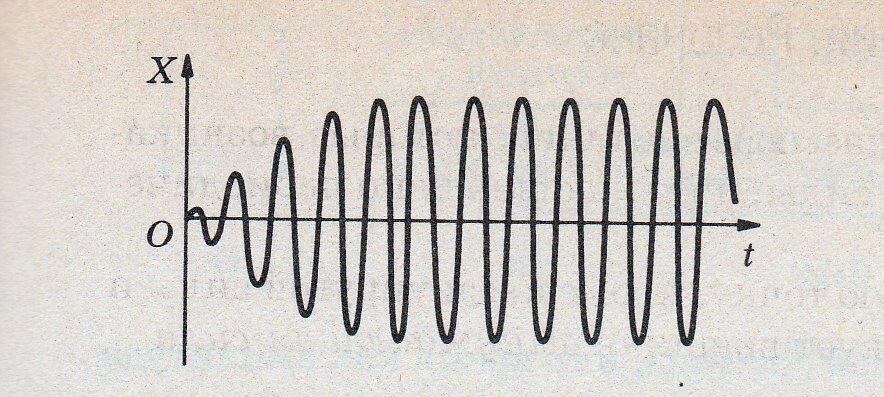
Сначала груз совершает сложные движения, но через несколько оборотов ручки груз начинает совершать правильные (установившиеся) периодические колебания:
Переход к установившимся колебаниям объясняется тем, что в начале действия внешней силы F груз одновременно участвует и в свободных колебаниях с собственной частотой, и в вынужденных колебаниях.
Свободные колебания затухают, так как сила F поддерживает только вынужденные колебания.
Когда свободные колебания груза затухнут, устанавливаются вынужденные колебания. Время установления вынужденных колебаний равно времени затухания свободных колебаний груза.
Уравнение установившихся вынужденных колебаний имеет вид:
Частота вынужденных колебаний равна частоте вынуждающей силы.
Амплитуда вынужденных колебаний А прямо пропорциональна амплитуде вынуждающей силы и имеет сложную зависимость от коэффициента затухания
и круговых частот собственного и вынужденного колебаний:
m – масса груза.
Амплитуда установившихся вынужденных колебаний (при данной частоте вынуждающей силы) даже в присутствии сопротивления среды не изменяется.
Объясняется это тем, что энергия, затраченная на преодоление сопротивления среды, непрерывно восполняется за счёт работы вынуждающей силы.
Опыт показывает, что амплитуда установившихся колебаний существенно зависит от частоты вынуждающей силы (частоты вращения стержня).
Когда частота вынуждающей силы приближается к собственной частоте пружинного маятника
амплитуда колебаний резко возрастает, достигая максимума при равенстве этих частот.
Это явление называется резонансом.
Почему при равенстве частот вынуждающей силы и собственной частоты колебательной системы амплитуда колебаний резко возрастает?
Объясняется это тем, что при этом условии сила упругости колебательной системы и вынуждающая сила действуют в одном направлении (их действия усиливаются). Тогда даже при малой величине вынуждающей силы амплитуда колебаний растёт.
Амплитуда при резонансе достигает особенно большой величины и резко выражена (острый резонанс), если сопротивление среды мало (если в нашем примере маятник колеблется в воздухе).
Если затухание среды большое (маятник колеблется в воде или масле), то резонансные явления получаются слабыми (амплитуды при резонансе не очень сильно отличаются от амплитуд при других частотах вынуждающей силы). Такой резонанс называется тупым резонансом.
На рисунке ниже показаны так называемые резонансные кривые – кривые зависимости амплитуды вынужденных колебаний от частоты вынуждающей силы.
Верхняя резонансная кривая соответствует малому сопротивлению среды (колебания происходят в воздухе).
Нижняя кривая соответствует большому сопротивлению среды (колебания происходят в воде или масле).
Показанные на рисунке резонансные кривые говорят о том. что при всякой частоте силы, амплитуды вынужденных колебаний тем больше, чем меньше затухание.
Из рисунка также видно, что максимум нижней кривой несколько сдвинут влево от максимума верхней кривой, то есть соответствует немного меньшей частоте вынуждающей силы. Это связано с увеличением периода свободных колебаний при возрастании затухания.
Резонанс играет очень большую роль в разных явлениях – в одних случаях вредную, в других – полезную.
Наглядный пример на резонанс.
Представим, что человек переходит ров по доске. Доска с человеком имеет собственную частоту колебаний. Шагая по доске с такой же частотой, человек попадает в резонанс – доска начинает сильно колебаться (изгибаться вверх – вниз).
По этой же причине нельзя поездам переезжать мосты на скорости, когда период ударов колёс о стыки рельсов может совпасть с периодом свободных колебаний моста. Поэтому поезда переезжают мосты медленно или, наоборот, на максимальной скорости.
Были случаи, когда рушился мост, по которому в ногу шла большая группа солдат. Отталкиваясь от моста с частотой его собственных колебаний, они раскачивали его, и мост разрушался.
Ещё пример. Если двигатель недостаточно отцентрирован или его вал содержит прогиб, то при работе такого двигателя возникает периодическая сила. Если частота этой силы совпадает с собственной частотой фундамента, то фундамент может разрушиться.
Резонанс полезен, например, когда с помощью малой силы можно сильно увеличить амплитуду вынужденных колебаний.
Так, можно раскачать язык большого колокола малой силой, если натягивать верёвку с периодом свободных колебаний языка колокола.
Другой пример полезного использования явления резонанса. На явлении резонанса основана работа частотомера – прибора предназначенного для измерения частоты переменного тока.
Принцип работы прибора заключается в следующем.
Прибор состоит из набора упругих пластинок с грузиками на концах (язычков). Массы грузиков и упругость пластинок подобраны так, чтобы собственные частоты соседних язычков отличались, например, на 0,5 Гц.
Электромагнит прибора состоит из обмоток, намотанных на магнитопровод, составленный из листов ферромагнитного материала, и якоря. Якорь представляет собой подвижную часть магнитопровода, отделённого от его неподвижной части воздушным промежутком.
При пропускании через обмотки переменного тока возникающее физическое усилие через колебания якоря передаются планке, укреплённой на гибких пластинках.
На каждый из язычков, связанных с планкой, действует гармоническая сила, частота которой равна частоте тока. Язычок, попавший в резонанс с этой силой, колеблется с большей амплитудой и показывает на шкале прибора частоту тока.
Возвращаемся к теории.
Мы говорили о гармонической силе, действующей на колебательную систему, но резонанс может наступить и при действии на колебательную систему периодической силы (не являющейся гармонической).
Например, можно периодически толкать качели, когда период толчков равен периоду собственных колебаний качели.
Но резонанс наступает и в том случае, если толкать качели, пропуская её одно качание, два качания и т. д., то есть раскачать качели можно не только толчками с периодом, равным периоду качели, но вдвое реже, втрое реже и т. д.
Это говорит о том, что негармоническое периодическое воздействие с периодом Т на качели равносильно одновременному действию гармонических сил с разными частотами, кратными наиболее низкой (основной) частоте (см. статью ” Сложение гармонических колебаний” и увидите аналогию).
В этом суть теоремы Фурье, позволяющей любую физическую величину (смещение, силу и т. д.) представлять в виде суммы этих величин, меняющихся по синусоидальному (гармоническому) закону.
Качели будут раскачиваться, когда в резонанс с собственными колебаниями качелей действует первый обертон силы, второй обертон силы и т. д.
Таким образом, периодическая негармоническая сила сильно раскачивает качели тогда, когда в резонанс с собственной частотой качелей (колебательной системы) попадает какое-либо из гармонических колебаний, входящих в состав силы.
Итак, добиться резонанса (резкого возрастания амплитуды колебаний колебательной системы) можно не только действуя на неё гармонической силой, но и действуя на неё периодической негармонической силой.
К.В. Рулёва, к. ф.-м. н., доцент. Подписывайтесь на канал. Ставьте лайки. Пишите комментарии. Спасибо.
Предыдущая запись: Затухающие колебания.
Следующая запись: Звуковые колебания. Тембр звука. Акустический резонанс.
Ссылки на занятия до электростатики даны в Занятии 1 .
Ссылки на занятия (статьи), начиная с электростатики, даны в конце Занятия 45 .
Ссылки на занятия (статьи), начиная с теплового действия тока, даны в конце Занятия 58.
Ссылки на занятия, начиная с переменного тока, даны в конце Занятия 70 .
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания – это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания – это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия – это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела – это величина его наибольшего отклонения от положения равновесия.
Период колебаний 
Частота колебаний 

к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой 

")
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них – синус и косинус – являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на 
Гармонические колебания – это колебания, при которых координата зависит от времени по гармоническому закону:
")
Выясним смысл входящих в эту формулу величин.
Положительная величина 
Аргумент косинуса 



Величина называется 





Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)")
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину 
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае 


График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае 


График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
")
Теперь дифференцируем полученное равенство (4):
")
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем 

Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:

C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными 
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой 
к оглавлению ▴
Пружинный маятник.
Пружинный маятник – это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу 

Координате
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости 


Если 





Тогда соотношение (8) принимает вид:

или

Мы получили уравнение гармонических колебаний вида (6), в котором

Циклическая частота колебаний пружинного маятника, таким образом, равна:

Отсюда и из соотношения 

Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник – это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна 
Запишем для маятника второй закон Ньютона:

и спроектируем его на ось

Если маятник занимает положение как на рисунке (т. е.

Если же маятник находится по другую сторону от положения равновесия (т. е.

Итак, при любом положении маятника имеем:

Когда маятник покоится в положении равновесия, выполнено равенство 


или

Это – уравнение гармонических колебаний вида (6), в котором

Следовательно, циклическая частота колебаний математического маятника равна:

Отсюда период колебаний математического маятника:

Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания – это колебания, совершаемые системой под воздействием внешней силы ")
Предположим, что собственная частота колебаний системы равна 
=F_{0}cos omega t")
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты 



Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
