 Векторы-строки матрицы . Пространство строк этой матрицы является векторным пространством, созданным линейными комбинациями векторов-строк.
Векторы-строки матрицы . Пространство строк этой матрицы является векторным пространством, созданным линейными комбинациями векторов-строк.  Векторы-столбцы матрицы . Пространство столбцов этой матрицы является векторным пространством, созданным линейными комбинациями векторов-столбцов.
Векторы-столбцы матрицы . Пространство столбцов этой матрицы является векторным пространством, созданным линейными комбинациями векторов-столбцов.
В линейной алгебре пространство столбцов (также называемое диапазоном или изображение ) матрицы A – диапазон (набор всех возможных линейных комбинаций ) его векторов-столбцов. Пространство столбцов матрицы – это изображение или диапазон соответствующего преобразования матрицы.
. Пусть F { displaystyle mathbb {F}} быть полем. Пространство столбцов матрицы m × n с компонентами из F { displaystyle mathbb {F}}является линейным подпространством в m-пространстве Ф м { displaystyle mathbb {F} ^ {m}}
быть полем. Пространство столбцов матрицы m × n с компонентами из F { displaystyle mathbb {F}}является линейным подпространством в m-пространстве Ф м { displaystyle mathbb {F} ^ {m}} . Размер пространства столбцов называется рангом матрицы и не превышает min (m, n). Также возможно определение матриц над кольцом K { displaystyle mathbb {K}}
. Размер пространства столбцов называется рангом матрицы и не превышает min (m, n). Также возможно определение матриц над кольцом K { displaystyle mathbb {K}} .
.
Строковое пространство определяется аналогично.
В этой статье рассматриваются матрицы действительных чисел. Пространства строк и столбцов являются подпространствами вещественных пространств Rи R соответственно.
Содержание
- 1 Обзор
- 1.1 Пример
- 2 Пространство столбцов
- 2.1 Определение
- 2.2 Основа
- 2.3 Размерность
- 2.4 Отношение к левому пустому пространству
- 2.5 Для матриц над кольцом
- 3 Строка
- 3.1 Определение
- 3.2 Основа
- 3.3 Измерение
- 3.4 Отношение к пустому пространству
- 3.5 Отношение к coimage
- 4 См. Также
- 5 Примечания
- 6 Ссылки
- 6.1 Учебники
- 7 Внешние ссылки
Обзор
Пусть A – матрица размером m на n. Тогда
- rank (A) = dim (rowsp (A)) = dim (colsp (A)),
- rank (A) = количество pivots в любой эшелонированной форме A,
- rank (A) = максимальное количество линейно независимых строк или столбцов A.
Если рассматривать матрицу как линейное преобразование из R до R, тогда пространство столбцов матрицы равно изображению этого линейного преобразования.
Пространство столбцов матрицы A – это набор всех линейных комбинаций столбцов в A. Если A = [a1,…., an], то colsp (A) = диапазон {a1,…., an}.
Концепция пространства строк обобщается для матриц более C, поля комплексных чисел или любого поля .
Интуитивно, учитывая матрицу A, действие матрицы A на вектор x вернет линейную комбинацию столбцов A, взвешенных по координатам x в качестве коэффициентов. Другой способ взглянуть на это состоит в том, что он (1) сначала проецирует x в пространство строк A, (2) выполняет обратимое преобразование и (3) помещает результирующий вектор y в пространстве столбцов A. Таким образом, результат y = A x должен находиться в пространстве столбцов A. См. разложение по сингулярным значениям для получения дополнительных сведений. по этой второй интерпретации.
Пример
Дана матрица J:
- J = [2 4 1 3 2 – 1-2 1 0 5 1 6 2 2 2 3 6 2 5 1] { displaystyle J = { begin {bmatrix} 2 4 1 3 2 \ – 1 -2 1 0 5 \ 1 6 2 2 2 \ 3 6 2 5 1 end {bmatrix}}}


строки r1= (2,4,1, 3,2), r2= (−1, −2,1,0,5), r3= (1,6,2,2,2), r4= (3,6,2, 5,1). Следовательно, пространство строк J является подпространством R, покрытым на {r1, r2, r3, r4}. Поскольку эти четыре вектора-строки являются линейно независимыми, пространство строк является 4-мерным. Более того, в этом случае можно увидеть, что все они ортогональны вектору n = (6, −1,4, −4,0), поэтому можно вывести что пространство строк состоит из всех векторов в R, которые ортогональны n.
Пространство столбцов
Определение
Пусть K будет полем из скаляры. Пусть A – матрица размера m × n с векторами-столбцами v1, v2,…, vn. линейной комбинацией этих векторов является любой вектор вида
- c 1 v 1 + c 2 v 2 + ⋯ + cnvn, { displaystyle c_ {1} mathbf {v} _ {1 } + c_ {2} mathbf {v} _ {2} + cdots + c_ {n} mathbf {v} _ {n},}

где c 1, c 2,…, c n – скаляры. Набор всех возможных линейных комбинаций v1,…, vnназывается пространством столбцов A. То есть пространство столбцов A является диапазоном векторов v1,…, vn.
Любая линейная комбинация векторов-столбцов матрицы A может быть записана как произведение A и вектора-столбца:
- A [c 1 ⋮ cn] = [ a 11 ⋯ a 1 n ⋮ ⋱ ⋮ am 1 ⋯ amn] [c 1 ⋮ cn] = [c 1 a 11 + ⋯ + cna 1 n ⋮ ⋮ ⋮ c 1 am 1 + ⋯ + cnamn] = c 1 [a 11 ⋮ am 1] + ⋯ + cn [a 1 n ⋮ amn] = c 1 v 1 + ⋯ + cnvn { displaystyle { begin {array} {rcl} A { begin {bmatrix} c_ {1} \ vdots \ c_ {n} end {bmatrix}} = { begin {bmatrix} a_ {11} cdots a_ {1n} \ vdots ddots vdots \ a_ {m1} cdots a_ {mn} end {bmatrix}} { begin {bmatrix} c_ {1} \ vdots \ c_ {n} end {bmatrix}} = { begin {bmatrix} c_ {1} a_ {11} + cdots + c_ {n} a_ {1n} \ vdots vdots vdots \ c_ {1} a_ {m1} + cdots + c_ {n} a_ {mn } end {bmatrix}} = c_ {1} { begin {bmatrix} a_ {11} \ vdots \ a_ {m1} end {bmatrix}} + cdots + c_ {n} { begin { bmatrix} a_ {1n} \ vdots \ a_ {mn} end {bm atrix}} \ = c_ {1} mathbf {v} _ {1} + cdots + c_ {n} mathbf {v} _ {n} end {array}}}

Следовательно, пространство столбцов A состоит из всех возможных произведений A x для x∈ C. Это то же самое, что и изображение (или диапазон ) соответствующего матричного преобразования.
- Пример
- Если A = [1 0 0 1 2 0] { displaystyle A = { begin {bmatrix} 1 0 \ 0 1 \ 2 0 end {bmatrix}}}, тогда векторы-столбцы v1= (1, 0, 2) и v2= (0, 1, 0).
- Линейная комбинация v1и v2- это любой вектор формы
- c 1 [1 0 2] + c 2 [0 1 0] = [c 1 c 2 2 c 1] { displaystyle c_ {1} { begin {bmatrix} 1 \ 0 \ 2 end {bmatrix}} + c_ {2} { begin {bmatrix} 0 \ 1 \ 0 end {bmatrix}} = { begin {bmatrix} c_ {1} \ c_ {2} \ 2c_ {1} end {bmatrix}} ,}
- c 1 [1 0 2] + c 2 [0 1 0] = [c 1 c 2 2 c 1] { displaystyle c_ {1} { begin {bmatrix} 1 \ 0 \ 2 end {bmatrix}} + c_ {2} { begin {bmatrix} 0 \ 1 \ 0 end {bmatrix}} = { begin {bmatrix} c_ {1} \ c_ {2} \ 2c_ {1} end {bmatrix}} ,}
- Набор всех таких векторов является пространством столбцов A. В этом случае пространство столбцов – это в точности набор векторов (x, y, z) ∈ R, удовлетворяющих уравнению z = 2x ( используя декартовы координаты, этот набор представляет собой плоскость через начало координат в трехмерном пространстве ).

Basis
Столбцы A охватывают пространство столбцов, но они не могут образовывать базис, если векторы-столбцы не t линейно независимый. К счастью, операции с элементарной строкой не влияют на отношения зависимости между векторами столбцов. Это позволяет использовать сокращение строки, чтобы найти базис для пространства столбцов.
Например, рассмотрим матрицу
- A = [1 3 1 4 2 7 3 9 1 5 3 1 1 2 0 8]. { displaystyle A = { begin {bmatrix} 1 3 1 4 \ 2 7 3 9 \ 1 5 3 1 \ 1 2 0 8 end {bmatrix}} { text {.}}}

Столбцы этой матрицы охватывают пространство столбцов, но они могут не быть линейно независимыми, и в этом случае некоторое их подмножество будет составлять основу. Чтобы найти этот базис, мы уменьшаем A до сокращенной формы эшелона строк :
- [1 3 1 4 2 7 3 9 1 5 3 1 1 2 0 8] ∼ [1 3 1 4 0 1 1 1 0 2 2 – 3 0 – 1 – 1 4] ∼ [1 0 – 2 1 0 1 1 1 0 0 0 – 5 0 0 0 5] ∼ [1 0 – 2 0 0 1 1 0 0 0 0 1 0 0 0 0]. { displaystyle { begin {bmatrix} 1 3 1 4 \ 2 7 3 9 \ 1 5 3 1 \ 1 2 0 8 end {bmatrix}} sim { begin {bmatrix} 1 3 1 4 \ 0 1 1 1 1 \ 0 2 2 -3 \ 4 end {bmatrix}} sim { begin {bmatrix} 1 0 -2 1 \ 0 1 1 1 \ 0 0 0 -5 \ 0 0 0 5 end {bmatrix}} sim { begin {bmatrix} 1 0 -2 0 \ 0 1 1 0 \ 0 0 0 1 \ 0 0 0 0 end {bmatrix}} { text {.}}}

На этом этапе ясно, что первый, второй и четвертый столбцы линейно независимы, а третий столбец представляет собой линейную комбинацию первые два. (В частности, v3= –2 v1+ v2.) Следовательно, первый, второй и четвертый столбцы исходной матрицы являются основой для пространства столбцов:
- [1 2 1 1], [3 7 5 2], [4 9 1 8]. { Displaystyle { begin {bmatrix} 1 \ 2 \ 1 \ 1 end {bmatrix}}, ; ; { begin {bmatrix} 3 \ 7 \ 5 \ 2 end {bmatrix }}, ; ; { begin {bmatrix} 4 \ 9 \ 1 \ 8 end {bmatrix}} { text {.}}}

Обратите внимание, что независимые столбцы уменьшенного эшелона строк форма – это именно столбцы с поворотными точками. Это позволяет определить, какие столбцы являются линейно независимыми, сводя их только к форме эшелона.
. Вышеупомянутый алгоритм может быть использован в общем для поиска отношений зависимости между любым набором векторов и выбора основы из любого охватывающий набор. Также поиск основы для пространства столбцов A эквивалентен поиску основы для пространства строк матрицы A транспонирования
Найти основу в практических условиях (например, для большие матрицы) обычно используется разложение по сингулярным числам.
Размер
Размер пространства столбцов называется рангом матрицы. Ранг равен количеству точек поворота в сокращенной форме эшелона строк и является максимальным количеством линейно независимых столбцов, которые могут быть выбраны из матрицы. Например, матрица 4 × 4 в приведенном выше примере имеет третий ранг.
Поскольку пространство столбцов является изображением соответствующего матричного преобразования, ранг матрицы такой же, как размер изображения. Например, преобразование R→ R, описанное вышеприведенной матрицей, отображает все R в некоторое трехмерное подпространство.
. Нулевое значение матрицы – это размерность пустое пространство и равно количеству столбцов в сокращенной форме эшелона строк, не имеющих точек поворота. Ранг и нулевое значение матрицы A с n столбцами связаны уравнением:
- rank (A) + nullity (A) = n. { displaystyle { text {rank}} (A) + { text {nullity}} (A) = n. ,}

Это известно как теорема ранга – недействительности.
Связь с левое пустое пространство
Левое пустое пространство в A – это набор всех векторов x таких, что x A = 0 . Это то же самое, что и пустое пространство в транспонировании из A. Произведение матрицы A и вектора x может быть записано в терминах скалярное произведение векторов:
- AT x = [v 1 ⋅ xv 2 ⋅ x ⋮ vn ⋅ x], { displaystyle A ^ { mathsf {T}} mathbf {x} = { begin {bmatrix} mathbf {v} _ {1} cdot mathbf {x} \ mathbf {v} _ {2} cdot mathbf {x} \ vdots \ mathbf {v} _ {n} cdot mathbf {x} end {bmatrix}},}

, поскольку векторы-строки из A являются транспонированными векторами-столбцами vkиз A. Таким образом, A x= 0if и только если x ортогонально (перпендикулярно) каждому из векторов-столбцов A.
Отсюда следует, что левое пустое пространство (нулевое пространство A) равно ортогональное дополнение к пространству столбцов матрицы A.
Для матрицы A пространство столбцов, пространство строк, пустое пространство и левое пустое пространство иногда называют четырьмя фундаментальными подпространствами.
Для матриц по кольцу
Аналогично пространство столбцов (иногда обозначаемое как пространство правого столбца) может быть определено для матриц по кольцу K как
- ∑ k = 1 nvkck { displaystyle sum limits _ {k = 1} ^ {n} mathbf {v} _ {k} c_ {k}}

для любого c 1,…, c n, с заменой векторного m-пространства на «правый свободный модуль », который изменяет порядок скалярного умножения вектора vkв скаляр c k таким образом, чтобы он был записан в векторном скаляре необычного порядка.
Строка
Определение
Пусть K будет полем из скаляров. Пусть A – матрица размера m × n с векторами-строками r1, r2,…, rm. линейная комбинация этих векторов – это любой вектор вида
- c 1 r 1 + c 2 r 2 + ⋯ + cmrm, { displaystyle c_ {1} mathbf {r} _ {1 } + c_ {2} mathbf {r} _ {2} + cdots + c_ {m} mathbf {r} _ {m},}

где c 1, c 2,…, c m – скаляры. Набор всех возможных линейных комбинаций r1,…, rmназывается пространством строк A. То есть пространство строк A является диапазоном векторов r1,…, rm.
Например, если
- A = [1 0 2 0 1 0], { displaystyle A = { begin {bmatrix} 1 0 2 \ 0 1 0 end { bmatrix}},}

тогда векторы-строки будут r1= (1, 0, 2) и r2= (0, 1, 0). Линейная комбинация r1и r2- это любой вектор вида
- c 1 (1, 0, 2) + c 2 (0, 1, 0) = (c 1, c 2, 2 c 1). { displaystyle c_ {1} (1,0,2) + c_ {2} (0,1,0) = (c_ {1}, c_ {2}, 2c_ {1}). ,}

Множество всех таких векторов – это пространство строк матрицы A. В этом случае пространство строк – это в точности набор векторов (x, y, z) ∈ K, удовлетворяющих уравнению z = 2x (с использованием декартовых координат, этот набор представляет собой плоскость , проходящую через начало координат в трехмерном пространстве ).
Для матрицы, представляющей однородную систему линейных уравнений, пространство строк состоит из всех линейных уравнений, которые следуют из уравнений системы.
Пространство столбца A равно пространству строки A.
Основа
На пространство строки не влияют операции с элементарной строкой. Это позволяет использовать сокращение строки, чтобы найти базис для пространства строки.
Например, рассмотрим матрицу
- A = [1 3 2 2 7 4 1 5 2]. { displaystyle A = { begin {bmatrix} 1 3 2 \ 2 7 4 \ 1 5 2 end {bmatrix}}.}

Строки этой матрицы охватывают пространство строк, но не могут быть линейно независимыми, и в этом случае ряды не будут основой. Чтобы найти основу, мы сокращаем A до эшелон строки, форма :
r1, r2, r3представляет строки.
- [1 3 2 2 7 4 1 5 2] ∼ ⏟ r 2 – 2 r 1 [1 3 2 0 1 0 1 5 2] ∼ ⏟ r 3 – r 1 [1 3 2 0 1 0 0 2 0 ] ∼ r 3 – 2 r 2 [1 3 2 0 1 0 0 0 0] ∼ r 1 – 3 r 2 [1 0 2 0 1 0 0 0 0]. { displaystyle { begin {bmatrix} 1 3 2 \ 2 7 4 \ 1 5 2 end {bmatrix}} underbrace { sim} _ {r_ {2} -2r_ {1}} { begin {bmatrix} 1 3 2 \ 0 1 0 \ 1 5 2 end {bmatrix}} underbrace { sim} _ {r_ {3} -r_ {1}} { begin {bmatrix} 1 3 2 \ 0 1 0 \ 0 2 0 end {bmatrix}} underbrace { sim} _ {r_ {3} -2r_ {2}} { begin {bmatrix} 1 3 2 \ 0 1 0 \ 0 0 0 end {bmatrix}} underbrace { sim} _ {r_ {1} -3r_ {2} } { begin {bmatrix} 1 0 2 \ 0 1 0 \ 0 0 0 end {bmatrix}}.}

Когда матрица находится в эшелонированной форме, ненулевые строки являются основой для пространства строк. В этом случае базис – {(1, 3, 2), (2, 7, 4)}. Другой возможный базис {(1, 0, 2), (0, 1, 0)} возникает в результате дальнейшего сокращения.
Этот алгоритм может использоваться в общем случае для поиска основы для диапазона набора векторов. Если матрица дополнительно упрощается до сокращенного эшелона строк формы, то результирующий базис однозначно определяется пространством строк.
Иногда удобно вместо этого найти основу для пространства строк среди строк исходной матрицы (например, этот результат полезен для элементарного доказательства того, что детерминантный ранг матрицы равен ее рангу). Поскольку операции со строками могут влиять на отношения линейной зависимости векторов-строк, такой базис вместо этого находят косвенно, используя тот факт, что пространство столбцов A равно пространству строк A. Используя приведенный выше пример матрицы A, найдите A и уменьшите его в виде эшелона строки:
- AT = [1 2 1 3 7 5 2 4 2] ∼ [1 2 1 0 1 2 0 0 0]. { displaystyle A ^ {T} = { begin {bmatrix} 1 2 1 \ 3 7 5 \ 2 4 2 end {bmatrix}} sim { begin {bmatrix} 1 2 1 \ 0 1 2 \ 0 0 0 end {bmatrix}}. }

Сводные точки указывают, что первые два столбца A образуют основу пространства столбцов A. Следовательно, первые две строки A (до любых сокращений строк) также образуют основу пространства строк A.
Размер
Размер пространства строк называется рангом матрицы. Это то же самое, что и максимальное количество линейно независимых строк, которые могут быть выбраны из матрицы, или, что то же самое, количество точек поворота. Например, матрица 3 × 3 в приведенном выше примере имеет ранг 2.
Ранг матрицы также равен размерности пространства столбцов. Размерность пустого пространства называется нулевой матрицы и связана с рангом следующим уравнением:
- ранг (A) + нулевое значение (A) = n, { displaystyle operatorname {rank} (A) + operatorname {nullity} (A) = n,}

, где n – количество столбцов в матрице A. Вышеприведенное уравнение известно как теорема ранга – недействительности.
Отношение к пустому пространству
пустое пространство матрицы A – это набор всех векторов x, для которых A x= 0. Произведение матрицы A и вектора x может быть записано в терминах скалярного произведения векторов:
- A x = [r 1 ⋅ xr 2 ⋅ x ⋮ rm ⋅ Икс], { Displaystyle A mathbf {x} = { begin {bmatrix} mathbf {r} _ {1} cdot mathbf {x} \ mathbf {r} _ {2} cdot mathbf {x} \ vdots \ mathbf {r} _ {m} cdot mathbf {x} end {bmatrix}},}

где r1,…, rm- векторы-строки A. Таким образом, A x= 0тогда и только тогда, когда x является ортогональным (перпендикулярно) каждому из векторов-строк A.
Отсюда следует что пустое пространство A является ортогональным дополнением к пространству строки. Например, если пространство строки представляет собой плоскость, проходящую через начало координат в трех измерениях, то пустое пространство будет перпендикулярной линией, проходящей через начало координат. Это обеспечивает доказательство теоремы ранга и недействительности (см. размерность выше).
Пространство строки и пустое пространство – это два из четырех основных подпространств, связанных с матрицей A (два других – это пространство столбцов и слева пустым пробел ).
Связь с совместным изображением
Если V и W являются векторными пространствами, то ядро линейного преобразования T: V → W – это множество векторов v ∈ V, для которых T (v ) = 0 . Ядро линейного преобразования аналогично пустому пространству матрицы.
Если V является внутренним пространством продукта, то ортогональное дополнение к ядру можно рассматривать как обобщение пространства строк. Это иногда называют сообразом T. Преобразование T взаимно однозначно по своему соизображению, а коимаж изоморфно отображает на изображение T.
Когда V не является внутренним пространством продукта, совместное изображение T может быть определено как факторное пространство V / ker (T).
См. Также
- Евклидово подпространство
Примечания
Ссылки
Учебники
- Антон, Ховард (1987), Элементарная линейная алгебра (5-е изд.), Нью-Йорк: Wiley, ISBN 0-471-84819-0
- Axler, Sheldon Jay (1997), Linear Algebra Done Right (2-е изд.), Springer -Verlag, ISBN 0-387-98259-0
- Банерджи, Судипто; Рой, Аниндья (6 июня 2014 г.), Линейная алгебра и матричный анализ для статистики (1-е изд.), CRC Press, ISBN 978-1-42-009538-8
- Борегар, Raymond A.; Фрали, Джон Б. (1973), Первый курс линейной алгебры: с дополнительным введением в группы, кольца и поля, Бостон: Houghton Mifflin Company, ISBN 0-395-14017-X
- Lay, David C. (22 августа 2005 г.), Linear Algebra and Its Applications (3-е изд.), Addison Wesley, ISBN 978-0-321-28713-7
- Леон, Стивен Дж. (2006), Линейная алгебра с приложениями (7-е изд.), Пирсон Прентис Холл
- Мейер, Карл Д. (15 февраля 2001 г.), Матричный анализ и прикладная линейная алгебра, Общество промышленной и прикладной математики (SIAM), ISBN 978-0-89871-454-8 , заархивировано с исходный 1 марта 2001 г.
- Пул, Дэвид (2006), Linear Algebra: A Modern Introduction (2 ed.), Brooks / Cole, ISBN 0-534 -99845-3
- Стрэнг, Гилберт (19 июля 2005 г.), Линейная алгебра и ее приложения (4-е изд.), Брукс Коул, ISBN 978-0-03-010567-8
Внешние ссылки
- Вайсштейн, Эрик У. «Пространство строк» . MathWorld.
- Вайсштейн, Эрик У. «Пространство столбца». MathWorld.
- Гилберт Стрэнг, Лекция по линейной алгебре Массачусетского технологического института по четырем фундаментальным подпространствам в Google Video, из MIT OpenCourseWare
- Видеоурок Академии Хана
- Лекция по пространство столбцов и пустое пространство Гилберта Стрэнга из MIT
- Пространство строк и пространство столбцов
Содержание
Благодарю Ю.А.Смолькина за обнаружение 07.08.19 ошибки на настоящей странице и информирование о ней.
Линейное пространство
Определения
Пусть дано множество $ mathbb V_{}=left{ X,Y,Z,U,dots right} $
элементов произвольной природы. Пусть для элементов этого множества определены
две операции: сложения $ X+Y_{} $ и умножения на любое вещественное число $ alpha_{} $:
$ alpha cdot X_{} $, и множество $ mathbb V_{} $ замкнуто относительно этих операций:
$ X+Y in mathbb V , alpha cdot X in mathbb V_{} $. Пусть эти операции подчиняются
аксиомам:
1.
$ X+Y=Y+X_{} $ для $ { X,, Y} subset mathbb V_{} $;
2.
$ (X+Y)+Z_{}=X+(Y+Z) $ для $ { X,, Y,, Z } subset mathbb V_{} $;
3.
в $ mathbb V_{} $ cуществует нулевой вектор $ mathbb O_{} $ со свойством $ X+ mathbb O =X_{} $ для $ forall Xin mathbb V_{} $;
4.
для каждого $ Xin mathbb V_{} $ существует обратный вектор $ X^{prime}in mathbb V_{} $ со свойством $ X+X^{prime}=mathbb O_{} $;
5.
$ 1cdot X=X_{} $ для $ forall Xin mathbb V_{} $;
6.
$ lambda left(mu X right)_{}= left(lambda mu right)X $ для $ forall Xin mathbb V_{} $, $ {lambda ,, mu } subset mathbb R_{} $ ;
7.
$ (lambda + mu)X=lambda X + mu X_{} $ для $ forall Xin mathbb V_{} $, $ {lambda ,, mu }subset mathbb R_{} $ ;
8.
$ lambda (X + Y) =lambda X_{} + lambda Y $ для $ { X,, Y} subset mathbb V_{} ,
lambda in mathbb R $.
Тогда такое множество $ mathbb V_{} $ называется линейным (векторным) пространством,
его элементы называются векторами, и — чтобы подчеркнуть их отличие от
чисел из $ mathbb R_{} $ — последние называются скалярами1).
Пространство, состоящее из одного только нулевого вектора, называется тривиальным .
Если в аксиомах
6
–
8
допустить умножение и на комплексные скаляры, то такое линейное пространство называется комплексным. Для упрощения рассуждений в настоящем разделе будут рассматриваться только вещественные пространства.
Линейное пространство является группой относительно операции сложения, причем группой абелевой.
Элементарно доказывается единственность нулевого вектора, и единственность
вектора, обратного вектору $ Xin mathbb V_{} $: $ X^{prime}=-1cdot X_{} $, его привычно обозначают $ – X_{} $.
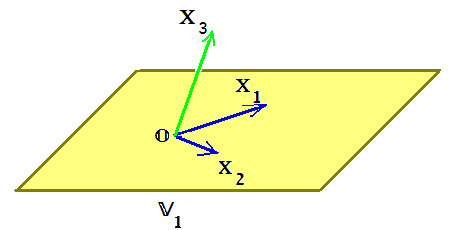
Подмножество $ mathbb V_{1} $ линейного пространства $ mathbb V_{} $, само являющееся линейным
пространством (т.е. $ mathbb V_{1} $ замкнуто относительно сложения векторов и умножения на произвольный скаляр), называется линейным подпространством пространства $ mathbb V_{} $. Тривиальными подпространствами линейного пространства $ mathbb V_{} $
называются само $ mathbb V_{} $ и пространство, состоящее из одного нулевого вектора
$ mathbb O_{} $.
Примеры линейных пространств
П
Пример 1. Пространство $ mathbb R^{3} $ упорядоченных троек вещественных чисел $ (a_1,a_2,a_{3}) $ с операциями, определяемыми равенствами:
$$ (a_1,a_2,a_3)+(b_1,b_2,b_3)= (a_1+b_1,a_2+b_2,a_3+b_3),
alpha (a_1,a_2,a_3) = ( alpha a_1, alpha a_2, alpha a_3 ) .
$$
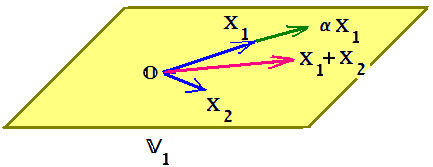
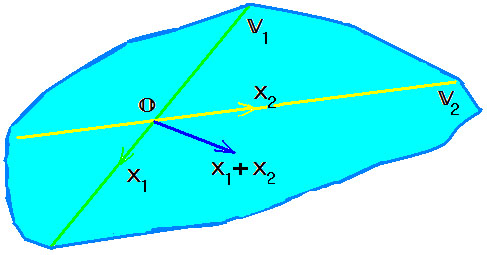
Геометрическая интерпретация очевидна: вектор в пространстве, «привязанный» к началу координат, может быть задан координатами своего конца $ (a_1,a_2,a_{3}) $. На рисунке показано и типичное подпространство пространства $ mathbb R^{3} $: плоскость, проходящая через начало координат.
Точнее говоря, элементами $ mathbb V_1 $ являются векторы, имеющие начало в начале координат и концы — в точках плоскости. Замкнутость такого множества относительно сложения векторов и их растяжения2) очевидна.
Исходя из этой геометрической интерпретации, часто говорят о векторе $ X_{} $ произвольного линейного пространства $ mathbb V_{} $ как о точке пространства $ mathbb V_{} $. Иногда эту точку
называют «концом вектора $ X_{} $». Кроме удобства ассоциативного восприятия, этим словам не придается никакого формального смысла: понятие «конец вектора» отсутствует в аксиоматике линейного пространства.
П
Пример 2. Основываясь на том же примере, можно дать и иную интерпретацию векторного пространства $ mathbb V_1 $ (заложенную, кстати, уже в самом происхождении слова «вектор»3))
— оно определяет набор «сдвигов» точек пространства $ mathbb R^{3} $. Эти сдвиги — или параллельные переносы любой пространственной фигуры — выбираются параллельными плоскости $ mathbb V_1 $.
Вообще говоря, с подобными интерпретациями понятия вектора все обстоит не так просто. Попытки аппелировать к его физическому смыслу — как к объекту, имеющему величину и направление — вызывают справедливую отповедь строгих математиков.
Определение же вектора как элемента векторного пространства очень напоминает эпизод с сепульками из знаменитого фантастического рассказа Станислава Лема (см.
☞
ЗДЕСЬ ). Не будем зацикливаться на формализме, а исследуем этот нечеткий объект в его частных проявлениях.
П
Пример 3. Естественным обобщением пространства $ mathbb R^{3} $ служит пространство $ mathbb R_{}^{n} $ —
векторное пространство строк $ (x_1,dots,x_{n}) $ или столбцов
$ (x_1,dots,x_n)^{^top} $. Один из способов задания подпространства
в $ mathbb R_{}^{n} $ — задание набора ограничений. Множество решений системы линейных однородных уравнений:
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&0,\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&0,\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&0
end{array}right.
iff
AX=mathbb O
$$
образует линейное подпространство пространства $ mathbb R_{}^{n} $. В самом деле, если
$$x_1=alpha_1,dots, x_n=alpha_n $$
— решение системы, то и
$$x_1=t alpha_1,dots, x_n= t alpha_n $$
— тоже решение при любом $ t in mathbb R $. Если
$$x_1=beta_1,dots, x_n=beta_n $$
— еще одно решение системы, то и
$$x_1=alpha_1+beta_1,dots,x_n=alpha_n+beta_n $$
— тоже будет ее решением.
?
Почему множество решений системы неоднородных уравнений не образует линейного подпространства?
П
Пример 4. Обобщая далее, можем рассмотреть пространство «бесконечных» строк или последовательностей
$$ (x_1,dots,x_n, dots ) , , $$
обычно являющееся объектом математического анализа — при рассмотрении последовательностей и рядов. Подпространство этого пространства образуют, например, линейные рекуррентные последовательности $ {x_k}_{k=0,1,2,dots } $ удовлетворяющие — при произвольных числах $ {x_0,dots x_{n-1} } subset mathbb R $ — линейному однородному разностному уравнению $ n_{} $-го порядка,
$$
x_{n+K}=a_1 x_{n+K-1}+ dots+ a_n x_K npu K in {0,1,2,dots } ;
$$
здесь числа $ { a_1,dots,a_{n-1}, a_n ne 0 } subset mathbb R $ считаются фиксированными.
Можно рассматривать строки (последовательности) «бесконечные в обе стороны» $ { dots,x_{-2},x_{-1},x_0,x_1,x_2,dots } $ — они используются в ТЕОРИИ СИГНАЛОВ.
П
Пример 5. Множество $ mtimes n_{} $-матриц с вещественными элементами с операциями сложения матриц и умножения на вещественные числа образует линейное пространство. Будем обозначать это пространство $ mathbb R^{mtimes n} $.
В пространстве квадратных матриц
фиксированного порядка каждое из следующих подмножеств составляет линейное подпространство:
симметричных, кососимметричных, верхнетреугольных, нижнетреугольных и диагональных матриц.
П
Пример 6. Множество полиномов одной переменной $ x_{} $ степени в точности равной $ n_{} $ с коэффициентами из $ mathbb A_{} $ (где $ mathbb A_{} $ — любое из множеств $ mathbb Z, mathbb Q, mathbb R_{} $ или $ mathbb C_{} $) с обычными операциями сложения полиномов и умножения на число из $ mathbb A_{} $
не образует линейного пространства. Почему? — Потому что оно не является замкнутым относительно сложения: сумма полиномов
$$ f(x)=x^n -x+1 quad mbox{ и } quad g(x)=-x^n+x^{n-1}-2 $$
не является полиномом $ n_{} $-й степени. Но вот множество полиномов степени
не выше $ n_{} $ $$ mathbb P_n= left{ p(x) in mathbb A [x] big| deg p(x) le n right} $$
линейное пространство образует; только к этому множеству надо придать еще и тождественно нулевой полином4). Очевидными подпространствами $ mathbb P_{n} $ являются $ mathbb P_{0}, mathbb P_1,dots,mathbb P_{n-1} $. Кроме того, подпространствами будут множество четных и множество нечетных полиномов степени не выше $ n_{} $. Множество всевозможных полиномов
$$
mathbb P= bigcup_{n=0}^{infty} mathbb P_n
$$
(без ограничения на степени) тоже образует линейное пространство.
П
Пример 7. Обобщением предыдущего случая будет пространство полиномов нескольких переменных $ x_1,dots, x_{ell} $ степени не выше $ n_{} $ с коэффициентами из $ mathbb A_{} $. Например, множество линейных полиномов
$$ left{ a_1x_1+dots+a_{ell}x_{ell}+b big| (a_1,dots,a_{ell},b) in mathbb A^{ell+1} right} $$
образует линейное пространство. Множество однородных полиномов (форм) степени $ n_{} $ (с присоединением к этому множеству тождественно нулевого полинома) — также линейное пространство.
С точки зрения приведенного в предыдущем пункте определения, множество строк с целочисленными компонентами
$$ mathbb Z^n = left{ (x_1,dots,x_n) mid {x_j}_{j=1}^n subset mathbb Z right} , $$
рассматриваемое относительно операций покомпонентного сложения и умножения на целочисленные скаляры, не является линейным пространством. Тем не менее, все аксиомы
1
–
8
будут выполнены если мы допустим умножение только на целочисленные скаляры. В настоящем разделе мы не будем акцентировать внимание на этом объекте, но он довольно полезен в дискретной математике, например в
☞
ТЕОРИИ КОДИРОВАНИЯ. Линейные пространства над конечными полями рассматриваются
☞
ЗДЕСЬ.
Изоморфизм
Пусть имеются два линейных пространства разной природы: $ mathbb V_{} $ с операцией $ +_{} $ и $ mathbb W_{} $
с операцией $ boxplus_{} $. Может оказаться так, что эти пространства «очень похожи», и свойства одного получаются простым «переводом» свойств другого.
Говорят, что пространства $ mathbb V_{} $ и $ mathbb W_{} $ изоморфны если между множествами их элементов можно установить такое взаимно-однозначное соответствие, что если $ X_{} leftrightarrow X^{prime} $ и $ Y_{} leftrightarrow Y^{prime} $ то $ X+Y leftrightarrow X_{}^{prime} boxplus Y^{prime} $ и
$ lambda X_{} leftrightarrow lambda X^{prime} $.
=>
При изоморфизме пространств $ mathbb V_{} $ и $ mathbb W_{} $ нулевому вектору одного пространства будет соответствовать нулевой вектор другого пространства.
П
Пример. Пространство $ mathbb R^{n}_{} $ изоморфно пространству $ mathbb P_{n-1}^{} $.
В самом деле, изоморфизм устанавливается соответствием
$$ [a_1,dots,a_n] leftrightarrow a_1+a_2x+dots + a_nx^{n-1} .$$
П
Пример. Пространство $ mathbb R^{mtimes n} $ вещественных матриц порядка $ m_{}times n $ изоморфно пространству
$ mathbb R_{}^{mn} $. Изоморфизм устанавливается с помощью операции векторизации матрицы
(матрица «вытягивается» в один столбец).
П
Пример. Пространство квадратичных форм от $ n_{} $ переменных изоморфно пространству симметричных матриц $ n_{} $-го порядка. Изоморфизм устанавливается соответствием, которое мы проиллюстрируем для случая $ n=3_{} $:
$$
a_{11}x_1^2+a_{12}x_1x_2+a_{13}x_1x_3+a_{22}x_2^2+a_{23}x_2x_3+a_{33}x_3^2 leftrightarrow
left(
begin{array}{ccc}
a_{11} & frac{1}{2}a_{12} & frac{1}{2}a_{13} \
frac{1}{2}a_{12} & a_{22} & frac{1}{2}a_{23} \
frac{1}{2}a_{13} & frac{1}{2}a_{23} & a_{33}
end{array}
right) .
$$
Понятие изоморфизма вводится для того, чтобы исследование объектов, возникающих в различных областях алгебры, но с «похожими» свойствами операций, вести на примере одного образца, отрабатывая на нем результаты, которые можно будет потом дешево тиражировать. Какое именно линейное пространство взять «за образец»? — См. концовку следующего пункта.
Линейная зависимость, базис, координаты
Линейной комбинацией системы векторов $ {X_1,dots,X_{m}} $ называется произвольный вектор
$$ alpha_1 X_1+dots+ alpha_m X_m $$
при каких-то фиксированных значениях скаляров $ alpha_{1}, dots, alpha_{m} $.
Множество всевозможных линейных комбинаций системы векторов $ {X_1,dots,X_{m}} $
$$
left{ alpha_1 X_1+dots+ alpha_m X_m bigg| {alpha_1,dots,alpha_m}subset mathbb R right}
$$
называется линейной оболочкой векторов $ X_1,dots,X_{m} $ и обозначается $ {mathcal L}(X_1,dots,X_{m}) $.
Т
Теорема 1. Линейная оболочка векторов $ X_1,dots,X_{m} $ образует линейное подпространство пространства $ mathbb V_{} $.
П
Пример. В пространстве $ mathbb P_{n} $ полиномов степеней $ le n_{} ge 3 $ линейной оболочкой полиномов $ x,x^2,x^3 $ будет множество полиномов вида
$ a_0x^3+a_1x^2+a_2x $, т.е. множество полиномов степеней $ le 3 $, имеющих корень $ lambda_{}=0 $.
♦
Система векторов $ { X_{1},dots,X_m } $
называется линейно зависимой (л.з.) если существуют числа $ alpha_{1},dots,alpha_m $, такие что хотя бы одно из них отлично от нуля и
$$
alpha_1X_1+dots+alpha_mX_m=mathbb O
$$
Если же это равенство возможно только при $ alpha_{1}=0,dots,alpha_m=0 $,
то система векторов называется линейно независимой (л.н.з.).
П
Пример. Для полиномов нескольких переменных свойство линейной зависимости является частным проявлением более общего свойства функциональной зависимости. Так, однородные полиномы (формы)
$$ f_1=(x_1+x_2+x_3)^2,quad f_2=x_1x_2+x_1x_3+x_2x_3,quad f_3=x_1^2+x_2^2+x_3^2 $$
являются линейно зависимыми, поскольку
$$ f_1-2,f_2-f_3 equiv 0 . $$
Полиномы
$$ tilde f_1=x_1+x_2+x_3,quad f_2=x_1x_2+x_1x_3+x_2x_3,quad f_3=x_1^2+x_2^2+x_3^2 $$
не являются линейно зависимыми, но являются функционально зависимыми, поскольку
$$ tilde f_1^2-2,f_2-f_3 equiv 0 . $$
♦
Т
Теорема 2. а) Если система содержит хотя бы один нулевой вектор, то она л.з.
б) Если система л.н.з., то и любая ее подсистема л.н.з.
в) При $ m>1 $ система $ {X_{1},dots,X_m} $ л.з. тогда и только тогда,
когда по меньшей мере один ее вектор линейно выражается через остальные,
т.е. существуют $ jin {1,dots,n } $ и константы $ gamma_{1},dots,gamma_{j-1},
gamma_{j+1},dots,gamma_{n} $ такие, что
$$ X_j=gamma_1X_1+dots+gamma_{j-1}X_{j-1}+ gamma_{j+1}X_{j+1}+dots + gamma_{m}X_{m} .$$
Т
Теорема 3. Если каждый из векторов системы $ { X_1,dots,X_{m} } $ линейно выражается через векторы другой системы $ { B_{1},dots,B_k } $ с меньшим числом векторов: $ k<m $, то система $ { X_{1},dots,X_m } $ будет л.з.
Доказательство аналогично приведенному
☞
ЗДЕСЬ.
Две системы векторов называются эквивалентными если каждый вектор одной системы линейно выражается через векторы другой и обратно.
Т
Теорема 4. Системы векторов
$$ { X_1,dots,X_{m} } quad mbox{ и } quad { Y_{1},dots,Y_k } $$
будут эквивалентными тогда и только тогда когда совпадают линейные оболочки этих систем:
$${mathcal L}(X_1,dots,X_m)={mathcal L}(Y_1,dots,Y_k) . $$
Т
Теорема 5. Если каждая из двух эквивалентных систем
$$ { X_1,dots,X_{m} } quad mbox{ и } quad { Y_{1},dots,Y_k } $$
является л.н.з., то эти системы состоят из одинакового числа векторов: $ m=k_{} $ .
Линейно независимая система векторов $ {X_{j}}subset mathbb V $ называется базисом этого пространства если каждый $ Xin mathbb V $
можно представить в виде линейной комбинации указанных векторов:
$$
X=sum_{j} alpha_j X_j .
$$
При этом не подразумевается конечность системы, т.е. суммирование может распространяться на бесконечное число слагаемых. Так, например, пространство бесконечных строк (или последовательностей) $ left[a_{1},a_2,dots, right] $ имеет бесконечный базис, состоящий из векторов
$$ [underbrace{0,dots,0,1}_j,0,dots , ] quad npu j in mathbb N . $$
В случае, когда базис пространства $ mathbb V_{} $ конечен,
пространство $ mathbb V_{} $ называется конечномерным, а число векторов
базиса тогда называется размерностью пространства $ mathbb V_{} $ и
обозначается5): $ dim mathbb V_{} $. Также полагают, что размерность тривиального пространства, состоящего из одного только нулевого вектора, равна нулю: $ dim {mathbb O_{} }= 0 $.
П
Пример. Линейное пространство $ mtimes n_{} $ матриц имеет размерность $ mn_{} $. Так, для случая $ m_{}=3 ,n=2 $ в качестве базиса можно выбрать следующий набор матриц
$$
left(
begin{array}{cc}
1 & 0 \
0 & 0 \
0 & 0
end{array}
right) ,
left(
begin{array}{cc}
0 & 1 \
0 & 0 \
0 & 0
end{array}
right) ,
left(
begin{array}{ccccc}
0 & 0 \
1 & 0 \
0 & 0 end{array}
right) ,
left(
begin{array}{cc}
0 & 0 \
0 & 1 \
0 & 0 end{array}
right) ,
left(
begin{array}{cc}
0 & 0 \
0 & 0 \
1 & 0
end{array}
right) ,
left(
begin{array}{cc}
0 & 0 \
0 & 0 \
0 & 1
end{array}
right) .
$$
♦
?
Найти размерности подпространства симметричных и подпространства кососимметричных матриц порядка $ n_{} $.
П
Пример [1]. Замечательный пример трехмерного линейного пространства дает нам совокупность всех цветов. Под суммой двух цветов будем понимать цвет, образованный их смешением
под умножением цвета на положительное число $ k_{} $ — увеличение в $ k_{} $ раз яркости цвета
A
Анимация
☞
ЗДЕСЬ (1500 K, gif)
под умножением на $ (-1) $ — взятие дополнительного цвета. При этом оказывается, что совокупность всех цветов выражается линейно через три цвета: красный, зеленый и синий, т.е. образует трехмерное линейное пространство. (Точнее, некоторое тело в трехмерном пространстве, поскольку яркости цветов ограничены верхним порогом раздражения.) Исследование этого трехмерного тела всех цветов является важным орудием цветоведения.
♦
Если $ dim mathbb V=d_{} $ и вектора $ X_1,dots,X_{d} $ являются базисными для $ mathbb V_{} $, то разложение вектора $ X in mathbb V_{} $ в сумму:
$$ X=alpha_1 X_1+dots+ alpha_d X_d .$$
называется разложением вектора $ X_{} $ по базису $ X_1,dots,X_{d} $; при этом числа $ alpha_1,dots, alpha_{d} $ называются координатами вектора $ X_{} $
в данном базисе.
Т
Теорема 6. Если $ dim mathbb V=d>0 $, то любая система из $ d_{} $ линейно независимых векторов пространства образует базис этого пространства.
Доказательство. Пусть $ {Y_1,dots,Y_d} $ — л.н.з. система. Рассмотрим произвольный
$ Xin mathbb V_{} $. Если система $ {X,Y_1,dots,Y_d} $ л.н.з., то
$ dim mathbb V ge d+1 $, что противоречит условию теоремы. Следовательно, система линейно
зависима: $ alpha_0X+alpha_1Y_1+dots+alpha_dY_d=mathbb O $ при каком-то из чисел
$ {alpha_j}_{j=0}^{d} $ не равном нулю. Если $ alpha_0=0 $, то $ alpha_1Y_1+dots+alpha_dY_d=mathbb O $
при каком-то ненулевом коэффициенте. Это означает, что система
$ {Y_1,dots,Y_d} $ линейно зависима, что противоречит предположению.
Следовательно $ alpha_0ne 0 $, но тогда вектор $ X_{} $ может быть представлен
в виде линейной комбинации векторов $ Y_1,dots,Y_d $:
$$X=- {alpha_1}/{alpha_0} Y_1-dots -{alpha_d}/{alpha_0}Y_d .$$
По определению, система $ {Y_1,dots,Y_d} $ является базисом $ mathbb V $.
♦
Т
Теорема 7. Любой вектор $ X in mathbb V_{} $ может быть разложен по фиксированному базису пространства единственным образом.
Очевидно, $ dim mathbb R^{n} = n $: строки из $ n_{} $ элементов
$$[1,0,0,dots,0], [0,1,0,dots,0], [0,0,1,dots,0], dots , [0,0,0,dots,1]
$$
образуют базис этого пространства.
Имеются два способа задания линейных подпространств в $ mathbb R^{n}_{} $. Пусть
$$ mathbb V_1 = {mathcal L}(A_1,dots,A_k) quad npu {A_1,dots,A_k }
subset mathbb R^n .$$
В разделе
☞
РАНГ установлено, что
$$ dim mathbb V_1 = operatorname{rank} { A_1,dots,A_k } = operatorname{rank} (A) ,$$
где $ A_{} $ — матрица, составленная из строк (столбцов) $ A_{1},dots,A_k $.
П
Пример. Найти базис подпространства
$$mathcal L left([1,2,1,1],, [-1,0,-1,0], , [-1,2,-1,1], , [0,1,0,1] right)
.$$
Решение. Ищем
$$
operatorname{rank}
left(
begin{array}{rrrr}
1 & 2 & 1 & 1 \
-1&0&-1&0 \
-1& 2 &-1 &1 \
0& 1& 0 & 1
end{array}
right)
$$
по методу окаймляющих миноров. Существует минор третьего порядка
$$
left|
begin{array}{rrrr}
1 & 2 & 1 \
-1&0&0 \
0& 1 & 1
end{array}
right|
$$
отличный от нуля, а определитель самой матрицы равен нулю. Замечаем,
что найденный отличный от нуля минор расположен в первой, второй и
четвертой строках матрицы. Именно эти строки и образуют базис.
Ответ. Базис составляют, например, первая, вторая и четвертая строки.
Другим способом задания линейного подпространства в $ mathbb R^{n} $ может служить
задание набора ограничений, которым должны удовлетворять векторы
подпространства. Таким набором ограничений может являться, например,
система уравнений
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&0,\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&0,\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&0
end{array}right. qquad iff qquad AX=mathbb O .
$$
Какова размерность подпространства решений этой системы?
На этот вопрос мы ответим сразу же,
если вспомним определение фундаментальной системы решений (ФСР).
Именно, ФСР — как набор линейно независимых
решений, через которые линейно выражается любое решение системы однородных уравнений — является базисом подпространства этих решений.
Т
Теорема 8. Множество решений системы однородных уравнений $ AX=mathbb O_{} $ образует линейное подпространство пространства $ mathbb R^{n} $. Размерность этого подпространства равна $ n-operatorname{rank} (A) $, а фундаментальная система решений образует его базис.
П
Пример. В пространстве $ mathbb P_{n} $ полиномов степеней $ le n_{} $ каноническим базисом можно взять систему мономов $ {1,x,x^2,dots, x^n } $, т.е. $ dim mathbb P_{n} =n+1 $. Координатами полинома
$$ f(x)=a_0+a_1x+a_2x^2+dots+a_nx^n $$ будут его коэффициенты. Можно выбрать и другой базис, например,
$ {1, x-c,(x-c)^2,dots,(x-c)^n } $ при произвольном числе $ c_{} $. Координатами полинома в этом базисе будут теперь коэффициенты формулы Тейлора:
$$
f(x) equiv f(c)+
frac{f^{prime}(c)}{1!} (x-c) + frac{f^{prime prime }(c)}{2!} (x-c)^2+
dots + frac{f^{(n)}(c)}{n!} (x-c)^{n} .
$$
?
Найти координаты полинома
$$ x^5-x^4+x^3-x^2-x+1 $$
в базисе $ {1,x+1,x^2+1,x^3+1,x^4+1,x^5+1} $.
Т
Теорема 9. Любое векторное пространство $ mathbb V_{} $ размерности $ d_{} $ изоморфно $ mathbb R^{d} $.
Доказательство. Изоморфизм можно установить следующим соответствием.
Если $ {X_1,dots , X_d } $ — какой-то базис $ mathbb V_{} $, то вектору
$ X in mathbb V $ поставим в соответствие набор его координат в этом базисе:
$$ X=x_1X_1+dots+x_d X_d Rightarrow
X mapsto [x_1,dots,x_d]in mathbb R^d .
$$
На основании теоремы $ 6 $, такое соответствие будет взаимно-однозначным,
а проверка двух свойств изоморфизма тривиальна.
♦
Последний результат позволяет свести исследование свойств произвольного линейного пространства $ mathbb V_{} $ к исследованию свойств пространства $ mathbb R^{d} $. Лишь бы только удалось нам найти базис пространства $ mathbb V_{} $, а также разложение произвольного вектора по этому базису.
Однако некоторые теоретические заключения можно сделать основываясь только лишь на фактах принципиального существования
базиса и возможности разложения по нему произвольного вектора.
Критерии линейной зависимости
Т
Теорема . Строки
$$
{(a_{11},dots,a_{1n}),dots, (a_{n1},dots,a_{nn})} subset mathbb C^n
$$
линейно зависимы тогда и только тогда, когда
$$
left|begin{array}{rrr}
a_{11}&dots & a_{1n} \
dots & & dots \
a_{n1}& dots & a_{nn}
end{array}
right|=0 , .
$$
Т
Теорема . Строки
$$
{(a_{11},dots,a_{1n}),dots, (a_{m1},dots,a_{mn})} subset mathbb C^n
$$
линейно зависимы тогда и только тогда, когда
$$
operatorname{rank} A <m , , npu A=left(begin{array}{rrr}
a_{11}&dots & a_{1n} \
dots & & dots \
a_{m1}& dots & a_{mn}
end{array}
right) , .
$$
=>
Строки
$$
{(a_{11},dots,a_{1n}),dots, (a_{m1},dots,a_{mn})} subset mathbb R^n
$$
линейно зависимы тогда и только тогда, когда
$$
det (A^{top} A) = 0 , .
$$
(Определитель в левой части можно интерпретировать как определитель Грама системы строк.)
Т
Теорема . Аналитические на интервале $ ]a,b[ $ функции $ u_1(x),dots,u_n(x) $ линейно зависимы на $ ]a,b[ $ тогда и только тогда, когда их вронскиан
$$
left|
begin{array}{llll}
u_1(x) & u_2(x) & dots & u_n(x) \
u_1^{prime}(x) & u_2^{prime}(x) & dots & u_n^{prime}(x) \
u_1^{prime prime}(x) & u_2^{prime prime}(x)&dots& u_n^{prime prime}(x)\
dots & & & dots \
u_1^{(n-1)}(x) &u_2^{(n-1)}(x) &dots & u_n^{(n-1)}(x)
end{array}
right|
$$
тождественно равен нулю на $ ]a,b[ $.
Относительный базис
В настоящем пункте $ mathbb V_1 $ обозначает линейное подпространство пространства $ mathbb V_{} $, отличное от тривиального; обозначаем $ d_1=dim mathbb V_1 $.
Т
Теорема. Произвольный базис подпространства $ mathbb V_1 $ можно дополнить до базиса пространства $ mathbb V_{} $.
Доказательство. Пусть $ {X_1,dots,X_{d_1} } $ — какой-то
базис $ mathbb V_1 $. В пространстве $ mathbb V_{} $ найдется вектор
$ X_{d_1+1} $ такой, что система $ {X_1,dots,X_{d_1}, X_{d_1+1 }} $ будет л.н.з. (В противном случае, $ dim mathbb V=d_1 $, что противоречит условию настоящего пункта.) Если
$ d_1+1=d = dim mathbb V $, то, на основании теоремы 5 предыдущего пункта, требуемый
базис построен. Если же $ d_1+1<d $, то в пространстве
$ mathbb V_{} $ найдется вектор
$ X_{d_1+2} $ такой, что система $ {X_1,dots,X_{d_1}, X_{d_1+1 },X_{d_1+2 } } $
будет л.н.з. И т.д. Процесс закончится за конечное число
шагов.
♦
Говорят, что система векторов $ {X_1,dots,X_k} $ линейно независима относительно подпространства $ mathbb V_1 $ пространства $ mathbb V_{} $ если
$${.}_{} mbox{ из условия } quad alpha_1X_1+dots+alpha_k X_k in mathbb V_1 quad mbox{ следует } quad
alpha_1=dots=alpha_k=0 .$$
Т
Теорема. Обозначим $ {Y_1,dots,Y_{d_1}} $ — произвольный базис $ mathbb V_1 $.
Система $ {X_{1},dots,X_k} $ л.н.з. относительно $ mathbb V_1 $ тогда и
только тогда, когда система $ {Y_1,dots,Y_{d_1},X_1,dots,X_k} $ линейно независима.
П
Пример. Найти все значения параметра $ {color{Red} alpha } $, при которых система
$${ X_1=[1,, 2,, {color{Red} alpha },, 1 ]^{^{top}}, X_2=[1,, {color{Red} alpha },, 2,, 1]^{^{top}} }
$$
л.н.з. относительно подпространства
$$mathbb V_1=left{X in mathbb R^4 bigg|
begin{array}{ll}
x_1+2,x_2-3,x_3+4, x_4 &=0, \
x_1+x_2-x_3 -x_4 &=0
end{array}
right} . $$
Решение. Базисом подпространства $ mathbb V_1 $ является произвольная
ФСР заданной системы однородных уравнений,
например $ {Y_1=[-1,2,1,0]^{^{top}}, Y_2=[6,-5,0,1]^{^{top}}} $. Теорема
утверждает, что система $ { X_1, X_2} $ л.н.з. относительно $ mathbb V_1 $
тогда и только тогда, когда система $ { X_1, X_2,Y_1,Y_2} $ л.н.з. (в обычном понимании). Последнее равносильно тому, что матрица, составленная
из этих векторов, должна иметь ранг равный $ 4_{} $.
$$operatorname{rank}
left(
begin{array}{rrrr}
1 & 1 &-1 & 6 \
2 & {color{Red} alpha } & 2 & -5 \
{color{Red} alpha } & 2 & 1 & 0 \
1 & 1 & 0 & 1
end{array}
right)=4 iff
left|
begin{array}{rrrr}
1 & 1 &-1 & 6 \
2 & {color{Red} alpha } & 2 & -5 \
{color{Red} alpha } & 2 & 1 & 0 \
1 & 1 & 0 & 1
end{array}
right|= {color{Red} alpha }^2-10, {color{Red} alpha } +16 ne 0 .
$$
Ответ. $ {color{Red} alpha }not in { 2,, 8} $.
Говорят, что система векторов $ {X_1,dots,X_k} $ образует базис пространства $ mathbb V_{} $ относительно (или над) $ mathbb V_1 $ если она л.н.з. относительно
$ mathbb V_1 $ и любой вектор $ Xin mathbb V_{} $ можно представить в виде
$$ X=c_1X_1+dots+c_kX_k+Y, quad mbox{ где } quad Yin mathbb V_1 . $$
Т
Теорема. Обозначим $ { Y_1,dots,Y_{d_1} } $ — произвольный базис подпространства $ mathbb V_1 $.
Система $ {X_1,dots,X_k} $ образует базис $ mathbb V_{} $ относительно $ mathbb V_1 $ тогда и
только тогда, когда система $ { X_1,dots,X_k,Y_1,dots,Y_{d_1} } $ образует
базис $ mathbb V_{} $.
Доказательство. Действительно, любой вектор $ Xin mathbb V_{} $ выражается через
векторы $ X_1,dots,X_k,Y_1,dots,Y_{d_1} $. По предыдущей теореме для линейной
независимости этих векторов необходимо и достаточно относительной линейной независимости
$ X_1,dots,X_k $.
♦
=>
Базис $ mathbb V_{} $ строится дополнением базиса $ mathbb V_1 $ векторами
$ X_1,dots,X_k $ линейно независимыми относительно $ mathbb V_1 $. Поэтому
$${.}_{} mbox{число векторов относительного базиса } = dim mathbb V – dim
mathbb V_1 .$$
Это число называется коразмерностью6) подпространства $ mathbb V_1 $ в пространстве $ mathbb V $.
Сумма и пересечение линейных подпространств
Пусть $ mathbb V_1 $ и $ mathbb V_2 $ — подпространства
линейного пространства $ mathbb V_{} $. Множество
$$ mathbb V_1+ mathbb V_2 = left{X_1+X_2 big| X_1 in mathbb V_1, X_2 in mathbb V_2 right}$$
называется суммой, а множество
$$ mathbb V_1 cap mathbb V_2 = left{X big| X in mathbb V_1, X in mathbb V_2 right}$$
— пересечением подпространств $ mathbb V_1 $ и $ mathbb V_2 $. Аналогично
определяется сумма и пересечение произвольного количества подпространств.
Понятие пересечения линейных подпространств совпадает с понятием пересечения их как множеств.
Как правило, $ mathbb V_1+ mathbb V_2 ne mathbb V _1 cup mathbb V_2 $.
Т
Теорема. $ mathbb V_1+ mathbb V_2 $ и $ mathbb V_1 cap mathbb V_2 $ являются
подпространствами линейного пространства $ mathbb V_{} $.
?
Докажите, что $ mathbb V_1+ mathbb V_2 $ — это подпространство минимальной размерности, содержащее как $ mathbb V_1 $, так и $ mathbb V_2 $.
Понятие суммы линейных подпространств является частным случаем суммы Минковского двух произвольных подмножеств $ mathbb A_1 $ и $ mathbb A_2 $ линейного пространства:
$$ mathbb A_1 + mathbb A_2 = { X+Y mid X in mathbb A_1, Y in mathbb A_2 } . $$
Для подмножеств $ mathbb A_1={ [1,0], [0,1], [0,-1] } $ и $ mathbb A_2={ [0,0], [1,1] } $ пространства $ mathbb R^2 $ имеем:
$$ mathbb A_1 + mathbb A_2 = { [1,0], [0,1], [0,-1], [2,1], [1,2] } , . $$
Т
Теорема. Имеет место формула:
$$
dim , mathbb V_1 + dim , mathbb V_2=dim , (mathbb V_1 cap mathbb V_2) +
dim , (mathbb V_1 + mathbb V_2) . $$
Доказательство
☞
ЗДЕСЬ.
?
Можно ли обобщить этот результат на случай трех (и более подпространств)? Cправедлив ли, к примеру, аналог
формулы включений-исключений в следующем виде:
$$dim , mathbb V_1 + dim , mathbb V_2 + dim , mathbb V_3 –
$$
$$
-left{dim , (mathbb V_1 cap mathbb V_2) + dim , (mathbb V_1 cap mathbb V_3) +
dim , (mathbb V_2 cap mathbb V_3) right} + $$
$$+ dim , (mathbb V_1 cap mathbb V_2 cap mathbb V_3) =dim , (mathbb V_1 + mathbb V_2 + mathbb V_3) ?$$
Т
Теорема. Имеет место формула:
$${mathcal L}(X_1,dots,X_m)+{mathcal L}(Y_1,dots,Y_{ell})=
{mathcal L}(X_1,dots,X_m,Y_1,dots,Y_{ell}) ;
$$
здесь $ {mathcal L} $ означает линейную оболочку.
П
Пример. Найти базис суммы и размерность пересечения
$$mathbb V_1={mathcal L}left(
left[ begin{array}{r} 0 \1 \ 1 \ 1
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 1 \ 2
end{array} right] ,
left[ begin{array}{r} -2 \0 \ 1 \ 1
end{array} right]
right)
quad mbox{ и } quad
mathbb V_2={mathcal L}left(
left[ begin{array}{r} -1 \3 \ 2 \ -1
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 0 \ -1
end{array} right]
right)
$$
Решение. Действуя согласно предыдущей теореме, составляем матрицу из всех векторов
$$
left( begin{array}{rrrrr}
0 & 1 & -2 & -1 & 1 \
1 & 1 & 0 & 3 & 1 \
1 & 1 & 1 & 2 & 0 \
1 & 2 & 1 & -1 & -1
end{array}
right)
$$
и ищем ее ранг методом окаймляющих миноров. Имеем: $ operatorname{rank} = 3 $ при ненулевом миноре матрицы расположенном в первых трех ее столбцах.
Ответ. Базис $ mathbb V_1 + mathbb V_2 $ составляют векторы $ X_1,X_2,X_3 $;
$ dim , (mathbb V_1 cap mathbb V_2) = 3+2 – 3 =2 $.
Алгоритм нахождения базиса
$ {mathcal L}(X_1,dots,X_m) cap {mathcal L}(Y_1,dots,Y_{ell}) $
проиллюстрируем на примере.
П
Пример. Найти базис $ mathbb V_1 cap mathbb V_2 $ при
$$
begin{array}{l}
mathbb V_1={mathcal L} left(
left[
begin{array}{r}
1 \ -1 \ 1 \ -1 \ 1
end{array}
right],,
left[
begin{array}{r}
1 \ 2 \ 1 \ 2 \ 1
end{array}
right],,
left[
begin{array}{r}
0 \ 1 \ 0 \ 1 \ 0
end{array}
right]
right) \
{}_{} qquad qquad quad X_1 quad quad X_2 quad quad X_3
end{array}
,
begin{array}{l}
mathbb V_2={mathcal L} left(
left[
begin{array}{r}
1 \ 0 \ 0 \ 0 \ 1
end{array}
right],,
left[
begin{array}{r}
1 \ 1 \ 0 \ 1 \ 1
end{array}
right],,
left[
begin{array}{r}
0 \ 1 \ 1 \ 1 \ 0
end{array}
right]
right) \
{}_{} quad qquad qquad Y_1 qquad Y_2 quad quad Y_3
end{array}
.
$$
Решение.
1.
Сначала найдем базисы каждого из подпространств:
$$dim mathbb V_1=2, mathbb V_1=mathcal L(X_1, X_2) ; dim mathbb V_2=3,
mathbb V_2=mathcal L(Y_1, Y_2, Y_3) . $$
2.
Произвольный вектор $ Zin mathbb R^5 $, принадлежащий
$ mathbb V_1 cap mathbb V_2 $, должен
раскладываться по базису каждого из подпространств:
$$Z=alpha_1 X_1 + alpha_2 X_2= beta_1 Y_1 + beta_2 Y_2 + beta_3 Y_3 .$$
Для определения неизвестных значений координат составляем систему уравнений
$$
begin{array}{l}
qquad X_1 X_2 \
qquad {color{RubineRed} downarrow} {color{RubineRed} downarrow} \
left( begin{array}{rrrrrrr}
1 & 1 & -1 & &-1 & & 0 \
-1 & 2 & 0 & & -1 & & -1 \
1 & 1 & 0 & & 0 & & -1 \
-1 & 2 & 0 & & -1 & & -1 \
1 & 1 & -1 & & -1 & & 0
end{array}
right) \
qquad qquad qquad {color{RubineRed} uparrow} qquad {color{RubineRed} uparrow} qquad quad {color{RubineRed} uparrow} \
quad qquad qquad -Y_1 quad – Y_2 quad -Y_3
end{array}
left(
begin{array}{r}
alpha_1 \ alpha_2 \ beta_1 \ beta_2 \ beta_3
end{array}
right)= mathbb O_{5times 1}
$$
и решаем ее по методу Гаусса с нахождением фундаментальной системы решений:
$$
left( begin{array}{rrrrr}
1 & 1 & -1 & -1 & 0 \
0 & 3 & -1 & -2 & -1 \
0 & 0 & 1 & 1 & -1 \
0 & 0 & 0 & 0 & 0 \
0 & 0 & 0 & 0 & 0
end{array}
right) left(
begin{array}{r}
alpha_1 \ alpha_2 \ beta_1 \ beta_2 \ beta_3
end{array}
right)= mathbb O quad Rightarrow qquad mbox{ ФСР } qquad
begin{array}{rrr|rr}
alpha_1 & alpha_2 & beta_1 & beta_2 & beta_3 \ hline
-1/3 & 1/3 & -1 & 1 & 0 \
1/3 & 2/3 & 1 & 0 & 1
end{array}
$$
3.
Получившиеся значения координат позволяют выразить
базис пересечения — либо через базис подпространства $ mathbb V_1 $
(если использовать полученные значения для $ alpha_1,alpha_2 $), либо
через базис подпространства $ mathbb V_2 $
(если использовать $ beta_1,beta_2, beta_3 $). Например,
$$
Z_1=-1/3 X_1 + 1/3 X_2 = [0,1,0,1,0]^{^{top}},
$$
$$
Z_2=1/3 X_1 + 2/3 X_2 = [1,1,1,1,1]^{^{top}}
.
$$
Ответ.7) $ left{[0,1,0,1,0]^{^{top}},, [1,1,1,1,1]^{^{top}} right} $.
?
Найти базисы суммы и пересечения подпространств
$$
mathbb V_1=left{
Xin mathbb R^4 left|
begin{array}{rrrrl}
2,x_1&+x_2&+4,x_3&+x_4 &= 0, \
2,x_1&+x_2&+3,x_3& &=0
end{array}
right.
right}
$$
и
$$
mathbb V_2=
left{
Xin mathbb R^4 left|
begin{array}{rrrrl}
3,x_1&+2,x_2&-x_3&-6, x_4 &= 0, \
2,x_1&&+8,x_3 &+7, x_4 &=0
end{array}
right.
right} .
$$
Решение
☞
ЗДЕСЬ.
Прямая сумма линейных подпространств
Пусть $ mathbb V_1 $ и $ mathbb V_2 $ — подпространства линейного пространства $ mathbb V_{} $.
Говорят, что $ mathbb V_{} $ раскладывается в прямую сумму подпространств
$ mathbb V_1 $ и $ mathbb V_2 $ если любой вектор $ Xin mathbb V_{} $ может быть представлен
в виде $ X=X_1+X_2 $, где $ X_1in mathbb V_1,X_2in mathbb V_2 $ и
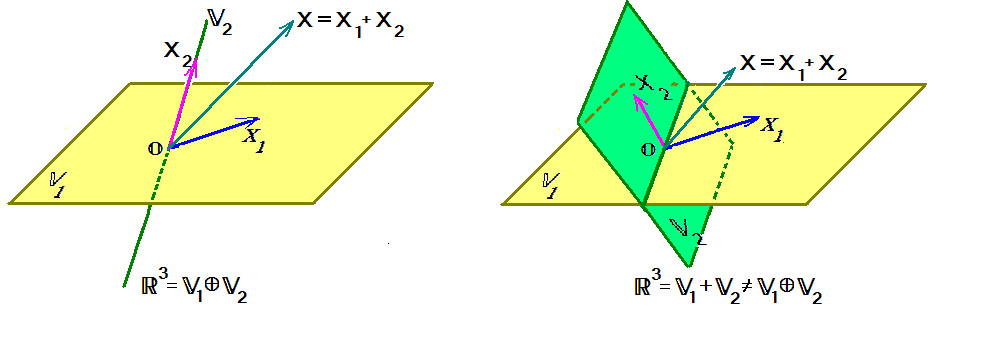
такое представление единственно. Этот факт записывают: $ mathbb V= mathbb V_1 oplus mathbb V_2 $. Вектор $ X_{1} $ называется проекцией вектора $ X_{} $ на подпространство $ mathbb V_1 $ параллельно подпространству $ mathbb V_{2} $.
П
Пример. Линейное пространство квадратных матриц порядка $ n_{} $
раскладывается в прямую сумму подпространств: подпространства симметричных
матриц и подпространства кососимметричных матриц. В самом деле, для матрицы
$ A_{ntimes n} $ справедливо разложение
$$A=frac{1}{2} left(A+A^{^top} right) + frac{1}{2} left(A-A^{^top} right)
$$
и в правой части первая скобка дает симметричную матрицу, а
вторая — кососимметричную. Покажите, что не существует иного
разложения матрицы $ A_{} $ в сумму симметричной и кососимметричной.
Т
Теорема. Пусть $ mathbb V=mathbb V_1 + mathbb V_2 $.
Эта сумма будет прямой тогда и только тогда, когда подпространства $ mathbb V_1 $ и $ mathbb V_2 $ имеют тривиальное пересечение:
$$mathbb V_1 cap mathbb V_2={mathbb O } .$$
Доказательство. Необходимость. Пусть сумма $ mathbb V_1 + mathbb V_2 $ — прямая, но существует вектор $ Xne mathbb O $, принадлежащий $ mathbb V_1 cap mathbb V_2 $.
Но тогда и вектор $ (-X) $ принадлежит $ mathbb V_1 cap mathbb V_2 $. Для нулевого вектора $ mathbb O $ получаем два представления в виде суммы проекций на подпространства:
$$ mathbb O = mathbb O + mathbb O = X+ (-X) , . $$
Это противоречит понятию прямой суммы.
Достаточность. Если $ mathbb V_1 cap mathbb V_2={mathbb O } $, но существует вектор $ X in mathbb V_1 + mathbb V_2 $, имеющий два различных разложения в сумму проекций
$$ X=X_1+X_2 =Y_1+ Y_2 quad npu quad {X_1,Y_1} subset mathbb V_1, {X_2,Y_2} subset mathbb V_2, $$
то
$$ (X_1-Y_1)+(X_2-Y_2) =mathbb O quad Rightarrow quad X_1-Y_1=Y_2-X_2 , , $$
т.е. вектор $ X_1-Y_1 $ принадлежит $ mathbb V_1 cap mathbb V_2 $. Но, по предположению, $ mathbb V_1 cap mathbb V_2={mathbb O } $, следовательно, $ X_1-Y_1=mathbb O $, но тогда и $ Y_2-X_2=mathbb O $.
♦
=>
Сумма $ mathbb V=mathbb V_1 + mathbb V_2 $ будет прямой тогда и только тогда, когда
базис $ mathbb V_{} $ может быть получен объединением базисов $ mathbb V_{j} $.
Сформулированное таким образом утверждение содержится во многих учебниках по линейной алгебре. Тем не менее, с формальной точки зрения, оно неверно. В самом деле,
пусть $ mathbb V_1 = {mathcal L}(X_1,X_2),, mathbb V_2 = {mathcal L}(X_2,X_3) $ при
линейно независимых $ X_1,X_2,X_3 $. Очевидно базис
$ mathbb V_1 + mathbb V_2 ={mathcal L}(X_1,X_2,X_3) $ получается объединением базисов
$ mathbb V_1 $ и $ mathbb V_2 $. В то же время $ mathbb V_1 cap mathbb V_2ne {mathbb O } $.
Причина возникновения этой ошибки кроется в содержании термина
«объединение базисов». С точки зрения терминологии теории множеств,
во множестве не могут содержаться одинаковые элементы (во множестве
они неразличимы). Однако мы с самого начала изложения допустили,
что в систему векторов могут входить одинаковые, которые различаются
порядком своего расположения (хотя это особо и не подчеркивалось, векторы
в системе всегда пронумерованы). Исходя из этих соображений, объединение
базисов $ mathbb V_1 $ и $ mathbb V_2 $ будет пониматься8)
в настоящем пункте (и кое-где далее) как система векторов, в которую входят последовательно векторы базисов
$ mathbb V_1 $ и $ mathbb V_2 $ — с допуском дублей. В рамках такой договоренности,
для приведенного примера получим: объединение базисов линейных подпространств
$ {mathcal L}(X_1,X_2) $ и $ {mathcal L}(X_2,X_3) $ представляет систему
$ {X_1,X_2,X_2,X_3} $, которая, очевидно, не является базисом. Таким образом
сумма $ {mathcal L}(X_1,X_2)+{mathcal L}(X_2,X_3) $ не является прямой, и результат
следствия остается справедливым.
П
Пример [2]. Доказать, что сумма подпространств
$$mathbb V_1={mathcal L}left(
left[ begin{array}{r} 2 \3 \ 11 \ 5
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 5 \ 2
end{array} right] ,
left[ begin{array}{r} 0 \1 \ 1 \ 1
end{array} right]
right)
quad mbox{ и } quad
mathbb V_2={mathcal L}left(
left[ begin{array}{r} 2 \1 \ 3 \ 2
end{array} right] ,
left[ begin{array}{r} 1 \1 \ 3 \ 4
end{array} right] ,
left[ begin{array}{r} 5 \2 \ 6 \ 2
end{array} right]
right)
$$
будет прямой и найти проекции вектора $ Z=[2,0,0,3]^{top} $ на эти подпространства.
Решение. Базисы $ mathbb V_1 $ и $ mathbb V_2 $ составляют соответственно системы
$ {X_2,X_3} $ и $ { Y_1,Y_2 } $, т.е. $ dim , mathbb V_1=dim , mathbb V_2 =2 $.
На основании следствия достаточно установить, что объединенная
система $ {X_2,X_3,Y_1,Y_2 } $ л.н.з. Для этого достаточно проверить, что определитель матрицы
$$
A=left(
begin{array}{rrrr}
1 & 0 & 2 & 1 \
1 & 1 & 1 & 1 \
5 & 1 & 3 & 3 \
2 & 1 & 2 & 4
end{array}
right)
$$
отличен от нуля. Поскольку это условие выполнено, то сумма $ mathbb V_1 + mathbb V_2 $ —
прямая и базис этой суммы состоит из взятых векторов.
Для нахождения разложения вектора $ X_{} $ по этому базису
решаем систему уравнений
$$A left[
begin{array}{c}
alpha_2 \ alpha_3 \ beta_1 \ beta_2
end{array}
right] = Z
$$
и получаем единственное решение:
$ alpha_2=-1,, alpha_3=-1,, beta_1 =1, , beta_2=1 $. Разложение
$ Z=Z_1+Z_2 $ составляют векторы $ Z_1=alpha_2 X_2+alpha_3 X_3 $ и
$ Z_2=beta_1 Y_1+beta_2 Y_2 $.
Ответ. $ Z=[-1,-2,-6,-3]^{top} + [3,2,6,6]^{top} $.
Линейные многообразия
Пусть $ mathbb V_1 $ — линейное подпространство пространства
$ mathbb V_{} $, а $ X_{0} $ — произвольный фиксированный вектор из $ mathbb V_{} $. Множество
$$ mathbb M = X_0+ mathbb V_1 = left{X_0+Y big| Y in mathbb V_1 right} $$
называется линейным многообразием (порожденным подпространством $ mathbb V_1 $). Размерностью этого
многообразия называется размерность порождающего его подпространства: $ dim mathbb M = dim mathbb V_1 $. В случае $ 1 < dim mathbb M = k < dim mathbb V $ о многообразии $ mathbb M $ говорят как о k-мерной плоскости (или гиперплоскости), а при $ k=1 $ — как о прямой.
Образно говоря, многообразие — это сдвиг порождающего его линейного подпространства.
П
Пример. Множество полиномов вида
$$ f(x)= a_0x^3+a_1x^2+a_2x+1 in mathbb R[x] , , $$
т.е. таких, что $ deg f le 3, f(0)=1 $ образует линейное многообразие, порожденное линейным подпространством полиномов $ { x(a_0x^2+a_1x+a_2) mid (a_0,a_1,a_2) in mathbb R^3 } $.
Пересечение многообразий определяется традиционным способом, а сумма многообразий не определяется. Будем называть многообразия, порожденные одним и тем же подпространством
$$ mathbb M = X_0+ mathbb V_1 quad u quad widetilde{mathbb M} = widetilde X_0+ mathbb V_1 , $$
параллельными многообразиями.
П
Пример. Множество столбцов пространства $ mathbb R^{n} $, удовлетворяющих системе уравнений
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&b_1,\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&b_2,\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&b_m
end{array}right.
iff
AX={mathcal B} ,
$$
образует линейное многообразие.
При $ {mathcal B}ne mathbb O_{mtimes 1} $ это многообразие не будет являться линейным пространством. Структуру этого множества описывала теорема из пункта
☞
ОБЩЕЕ РЕШЕНИЕ: если система совместна, то ее
общее решение можно представить как сумму какого-то одного ее решения и общего
решения соответствующей однородной системы $ AX= mathbb O $. Таким образом, многообразие решений неоднородной системы $ AX={mathcal B} $ допускает «параметрическое представление»:
$$mathbb M=X_0+ {mathcal L}(X_1,dots,X_{n-{mathfrak r}})=
$$
$$=left{X_0+t_1
X_1+dots+ t_{n-{mathfrak r}} X_{n-{mathfrak r}} mid (t_1,dots, t_{n-{mathfrak r}}) in mathbb R^{n-{mathfrak r}} right} ; $$
здесь $ X_{0} $ означает частное решение системы (т.е. $ AX_0={mathcal B} $),
$ {X_1,dots,X_{n-{mathfrak r}}} $ — ФСР для системы $ AX= mathbb O $,
а $ mathfrak r= operatorname{rank} A= operatorname{rank} [Amid mathcal B] $.
Получаем, следовательно, $ (n-{mathfrak r}) $-мерную плоскость в $ mathbb R^n $, a в случае $ (n-{mathfrak r})=1 $ — прямую
$$mathbb M=X_0+tX_1 quad npu t in mathbb R ; $$
в последнем случае вектор $ X_{1} $ называют направляющим вектором этой прямой.
§
Некоторые задачи на линейные многообразия
☞
ЗДЕСЬ.
Факторпространство
определяется
☞
ЗДЕСЬ.
Преобразование координат при замене базиса
Пусть $ mathbb V_{} $ — линейное пространство размерности $ n_{} $, пусть
$$ {X_1,dots,X_n} quad u quad {{mathfrak X}_1,dots,{mathfrak X}_n}$$
— два произвольных его базиса («старый» и «новый»).
Задача. Вывести соотношения, связывающие координаты произвольного
вектора $ Xin mathbb V_{} $ в старом и новом базисах:
$$X=x_1X_1+dots+x_nX_n={mathfrak x}_1{mathfrak X}_1+dots+{mathfrak x}_n{mathfrak X}_n
.$$
Предположим, что нам известны координаты векторов нового базиса в старом:
$$
left{
begin{array}{ccc}
{mathfrak X}_1&=&c_{11}X_1+c_{21}X_2+dots+c_{n1}X_n, \
{mathfrak X}_2&=&c_{12}X_1+c_{22}X_2+dots+c_{n2}X_n, \
dots& & dots \
{mathfrak X}_n&=&c_{1n}X_1+c_{2n}X_2+dots+c_{nn}X_n.
end{array}
right.
$$
Матрица
$$
C=left(
begin{array}{cccc}
c_{11} & c_{12} & dots & c_{1n} \
c_{21} & c_{22} & dots & c_{2n} \
dots & & & dots \
c_{n1} & c_{n2} & dots & c_{nn} \
end{array}
right),
$$
по столбцам которой стоят координаты новых базисных векторов в старом базисе называется матрицей перехода от старого базиса к новому, а также — ввиду одного из приведенных ниже результатов — матрицей преобразования координат.
Т
Теорема. Матрица $ C_{} $ неособенная.
Доказательство. Cначала покажем справедливость утверждения в частном случае $ mathbb V=mathbb R^n $. Вектора нового и старого базисов являются столбцами из $ n $ вещественных чисел, и равенства, задающие элементы матрицы $ C_{} $, можно переписать в матричном виде:
$$
left[{mathfrak X}_1|dots|{mathfrak X}_nright]=left[X_1|dots|X_nright]cdot C .
$$
Здесь $ | $ означает конкатенацию. Поскольку системы $ {X_1,dots,X_n} $ и $ {{mathfrak X}_1,dots,{mathfrak X}_n} $ — базисные, то
$$det left[X_1|dots |X_nright] ne 0, quad
det left[{mathfrak X}_1|dots |{mathfrak X}_nright] ne 0 .$$
Из последнего матричного равенства (и теоремы Бине-Коши ) тогда следует, что $ det Cne 0 $.
Теперь докажем теорему для случая произвольного пространства. Если $ det C= 0 $, то столбцы матрицы $ C_{} $ линейно зависимы (см.
☞
ЗДЕСЬ ), т.е. существует линейная комбинация
$$alpha_1 c_{j1}+ dots+alpha_n c_{jn}=0 quad npu quad forall jin {1,dots,n } $$
и при некотором $ alpha_kne 0 $. Но тогда из формул
$$
left{
begin{array}{ccc}
{mathfrak X}_1&=&c_{11}X_1+c_{21}X_2+dots+c_{n1}X_n, \
{mathfrak X}_2&=&c_{12}X_1+c_{22}X_2+dots+c_{n2}X_n, \
dots& & dots \
{mathfrak X}_n&=&c_{1n}X_1+c_{2n}X_2+dots+c_{nn}X_n.
end{array}
right.
$$
следует, что
$$alpha_1 {mathfrak X}_1+ dots+alpha_n {mathfrak X}_n=mathbb O ,$$
что противоречит линейной независимости системы $ {{mathfrak X}_1,dots,{mathfrak X}_n} $.
♦
П
Пример. Найти матрицу перехода
| от базиса | к базису | |
|---|---|---|
| $ left[1,1,0,0,0right] $ | $ left[1,1,1,1,1right] $ | |
| $ left[1,0,1,0,0right] $ | $ left[1,1,1,1,0right] $ | |
| $ left[1,0,0,1,0right] $ | $ left[1,1,1,0,0right] $ | |
| $ left[1,0,0,0,1right] $ | $ left[1,1,0,0,0right] $ | |
| $ left[1,1,1,1,1right] $ | $ left[1,0,0,0,0right] $ |
Решение. Можно попытаться найти элементы матрицы $ C_{} $ напрямую — устанавливая формулы связи между строками. В нашем конкретном примере это не очень трудно сделать — первый и четвертый
столбцы матрицы $ C_{} $ вообще очевидны поскольку $ {mathfrak X}_1 = X_5,, {mathfrak X}_4 = X_1 $. Но мы пойдем по формальному пути и воспользуемся определяющим матричным соотношением, которое мы получили при доказательстве предыдущей теоремы. Поставим координаты базисных векторов по столбцам соответствующих матриц:
$$
left[{mathfrak X}_1|dots|{mathfrak X}_nright]=left[X_1|dots|X_nright]cdot C quad Rightarrow
$$
$$
Rightarrow C= left[X_1|dots|X_nright]^{-1} cdot left[{mathfrak X}_1|dots|{mathfrak X}_nright] .
$$
В нашем примере имеем:
$$
C=
left(
begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \
1 & 0 & 0 & 0 & 1 \
0 & 1 & 0 & 0 & 1 \
0 & 0 & 1 & 0 & 1 \
0 & 0 & 0 & 1 & 1
end{array}
right)^{-1}
left(
begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \
1 & 1 & 1 & 1 & 0 \
1 & 1 & 1 & 0 & 0 \
1 & 1 & 0 & 0 & 0 \
1 & 0 & 0 & 0 & 0
end{array}
right)=
$$
$$
=frac{1}{3}
left(
begin{array}{rrrrr}
1 & 2 & -1 & -1 & -1 \
1 & -1 & 2 & -1 & -1 \
1 & -1 & -1 & 2 & -1 \
1 & -1 & -1 & -1 & 2 \
-1 & 1 & 1 & 1 & 1
end{array}
right)
left(
begin{array}{ccccc}
1 & 1 & 1 & 1 & 1 \
1 & 1 & 1 & 1 & 0 \
1 & 1 & 1 & 0 & 0 \
1 & 1 & 0 & 0 & 0 \
1 & 0 & 0 & 0 & 0
end{array}
right) =
$$
$$
=left(
begin{array}{rrrrr}
0 & 1/3 & 2/3 & 1 & 1/3 \
0 & 1/3 & 2/3 & 0 & 1/3 \
0 & 1/3 & -1/3 & 0 & 1/3 \
0 & -2/3 & -1/3 & 0 & 1/3 \
1 & 2/3 & 1/3 & 0 & -1/3
end{array}
right) .
$$
♦
Т
Теорема. Координаты вектора в старом и новом базисах связаны посредством матрицы перехода $ C_{} $ соотношениями
$$
left{
begin{array}{ccc}
x_1&=&c_{11}{mathfrak x}_1+c_{12}{mathfrak x}_2+dots+c_{1n}{mathfrak x}_n, \
x_2&=&c_{21}{mathfrak x}_1+c_{22}{mathfrak x}_2+dots+c_{2n}{mathfrak x}_n, \
dots& & dots \
x_n&=&c_{n1}{mathfrak x}_1+c_{n2}{mathfrak x}_2+dots+c_{nn}{mathfrak x}_n
end{array}
right.
quad iff quad
left( begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array} right)
=C left( begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array} right) .
$$
Доказательство.
$$
begin{array}{lll}
X=x_1X_1+dots+x_nX_n&=&{mathfrak x}_1{mathfrak X}_1+dots+{mathfrak x}_n{mathfrak X}_n = \
&=&{mathfrak x}_1(c_{11}X_1+c_{21}X_2+dots+c_{n1}X_n)+\
&+&{mathfrak x}_2(c_{12}X_1+c_{22}X_2+dots+c_{n2}X_n)+\
&+& dots +\
&+&{mathfrak x}_n(c_{1n}X_1+c_{2n}X_2+dots+c_{nn}X_n)=\
=(c_{11}{mathfrak x}_1+c_{12}{mathfrak x}_2+dots+c_{1n}{mathfrak x}_n)X_1&+&dots+
(c_{n1}{mathfrak x}_1+c_{n2}{mathfrak x}_2+dots+c_{nn}{mathfrak x}_n)X_n
end{array}
$$
Поскольку при фиксированном базисе координаты вектора определяются однозначно (теорема $ 6 $
☞
ЗДЕСЬ ),
получаем равенства
$$
left{
begin{array}{ccc}
x_1&=&c_{11}{mathfrak x}_1+c_{12}{mathfrak x}_2+dots+c_{1n}{mathfrak x}_n, \
x_2&=&c_{21}{mathfrak x}_1+c_{22}{mathfrak x}_2+dots+c_{2n}{mathfrak x}_n, \
dots& & dots \
x_n&=&c_{n1}{mathfrak x}_1+c_{n2}{mathfrak x}_2+dots+c_{nn}{mathfrak x}_n
end{array}
right.
quad iff quad
left( begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array} right)
=C left( begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array} right)
$$
♦
Практическое значение последнего результата невелико, т.к. нас интересуют именно новые координаты.
=>
Новые координаты выражаются через старые по формуле
$$
left( begin{array}{c}
{mathfrak x}_1 \ {mathfrak x}_2 \ vdots \ {mathfrak x}_n
end{array} right)
=C^{-1} left( begin{array}{c}
x_1 \ x_2 \ vdots \ x_n
end{array} right),
$$
при этом матрицу $ C^{-1} $ можно интерпретировать как матрицу перехода от нового базиса к старому.
?
Пусть в некотором «новейшем» базисе $ { {mathcal X}_1,dots,{mathcal X}_n } $
пространства $ mathbb V_{} $ вектор $ X_{} $ имеет координаты $ (varkappa_1,dots,varkappa_n) $.
Как они связаны с координатами $ (x_{1},dots,x_n) $ в старом базисе $ {X_1,dots,X_n} $, если известны матрица $ C_{} $ перехода от этого базиса к базису $ {{mathfrak X}_1,dots,{mathfrak X}_n } $ и матрица $ D_{} $ перехода от базиса $ {{mathfrak X}_1,dots,{mathfrak X}_n } $ к базису $ {{mathcal X}_1,dots,{mathcal X}_n } $ ?
Евклидовы пространства
— как линейные пространства, в которых вводится понятия угла и расстояния между векторами — рассматриваются
☞
ЗДЕСЬ.
Нормированные пространства
— как линейные пространства, в которых вводится понятие расстояния между векторами — рассматриваются
☞
ЗДЕСЬ.
Линейные отображения
пространств рассматриваются
☞
ЗДЕСЬ
Задачи
Источники
[1]. Лаврентьев М., Люстерник Л. Основы вариационного исчисления. Том 1. Часть I. М.-Л.ОНТИ. 1935, с. 22
[2]. Икрамов Х.Д. Задачник по линейной алгебре. М.1975
[3]. Шилов Г.Е. Математический анализ. Конечномерные линейные пространства. М.Наука.1969
Ну, вообщем я попробовал:
а)
У меня получилось вот такая ступенчатая матрица (для транспонированной изначальной матрицы):
[math]begin{pmatrix} 4 & -1 & frac{ 9 }{ 2 } & frac{ 5 }{ 2 } & frac{ 3 }{ 2 } \ 0 & 2 & 1 & 1 & 1 \ 0 & 0 & 7 & 1 & -1 \ 0 & 0 & 0 & 15 & -1 \ 0 & 0 & 0 & 0 & 0 end{pmatrix}[/math]
И такая для нетранспонированной:
[math]begin{pmatrix} 4 & 2 & -1 & -4 & 0 \ 0 & 14 & 1 & 36 & 16 \ 0 & 0 & 1 & -12 & -8 \ 0 & 0 & 0 & 1 & -frac{ 1 }{ 2 } \ 0 & 0 & 0 & 0 & 0 end{pmatrix}[/math]
(Просто я пока так и не понял, через какую делать правильно)
И вот дальше я не совсем понимаю, как найти базис линейной оболочки строк отсюда…
б)
Тут вроде получше, получилось, чем под а)
Решал по методу Гаусса, собственно ступенчатый вид нашел уже под буквой а), принял [math]x_{1},x_{2},x_{3},x_{4}[/math] за базисные, а [math]x_{5}[/math] и одна свободная осталась только [math]x_{5}[/math]. Получил фундаментальную систему решений:
[math]e=begin{pmatrix} 0 \ 0 \ 2 \ -frac{ 1 }{ 2 } \ 1 end{pmatrix}[/math]
Как я понимаю, это и будет базис решений однородной системы, так как все другие решения, через него выражаются.
Осталось с буквой а) разобраться…
Векторы-строки матрицы . Пространство строк этой матрицы – это векторное пространство, созданное линейными комбинациями векторов-строк.
Векторы-столбцы матрицы . Пространство столбцов этой матрицы – это векторное пространство, созданное линейными комбинациями векторов-столбцов.
В линейной алгебре , то столбец пространство (также называемый диапазон или изображений ) из матрицы A является оболочка (набор всех возможных линейных комбинаций ) его векторов – столбцов . Пространство столбцов матрицы – это изображение или диапазон соответствующего преобразования матрицы .
Позвольте быть поле . Колонка пространство в м × п матрицы с компонентами является линейным подпространством в м – пространстве . Размерность пространства столбца называется рангом матрицы и составляет не более мин ( м , п ) . Определение для матриц над кольцом также возможно .
Строка пространство определяется аналогично.
Пространство строк и пространство столбцов матрицы A иногда обозначают как C ( A T ) и C ( A ) соответственно.
В этой статье рассматриваются матрицы действительных чисел . Пространства строк и столбцов являются подпространствами реальных пространств и соответственно.


Обзор
Пусть A – матрица размером m на n . потом
- ранг ( A ) = dim (rowsp ( A )) = dim (colsp ( A )) ,
- ранг ( A ) = количество опорных точек в любом эшелоне формы A ,
- Оценка ( ) = максимальное число линейно независимых строк или столбцов A .
Если рассматривать матрицу как линейное преобразование из в , то пространство столбцов матрицы равно изображению этого линейного преобразования.
Столбец пространство матрицы A есть множество всех линейных комбинаций столбцов в A . Если A = [ a 1 ⋯ a n ] , то colsp ( A ) = span ({ a 1 , …, a n }) .
Концепция ряд космических обобщается матрицы над , полем комплексных чисел или над любым полем .

Интуитивно, учитывая матрицу A , действие матрицы A на вектор x вернет линейную комбинацию столбцов A, взвешенных по координатам x в качестве коэффициентов. Другой способ смотреть на это является то , что он будет (1) первый проект х в строке пространства А , (2) выполняет обратимый преобразование, и (3) место результирующий вектор у в пространстве столбцов матрицы A . Таким образом, результат у = х должны находиться в пространстве столбцов матрицы A . Подробнее об этой второй интерпретации см. В разделе « Разложение по сингулярным числам» .
Пример
Учитывая матрицу J :
строки являются
,
,
,
. Следовательно, пространство строк J – это подпространство, натянутое на { r 1 , r 2 , r 3 , r 4 } . Поскольку эти четыре вектора-строки линейно независимы , пространство строк является 4-мерным. Более того, в этом случае видно, что все они ортогональны вектору n = [6, −1, 4, −4, 0] , поэтому можно сделать вывод, что пространство строк состоит из всех векторов в , которые ортогональны к п .





Колонка
Определение
Пусть K является полем из скаляров . Пусть A – матрица размера m × n с векторами-столбцами v 1 , v 2 , …, v n . Линейная комбинация этих векторов является любой вектор вида
где c 1 , c 2 , …, c n – скаляры. Множество всех возможных линейных комбинаций об 1 , …, V п называется столбец пространства из A . То есть пространство столбцов A – это промежуток векторов v 1 , …, v n .
Любая линейная комбинация векторов-столбцов матрицы A может быть записана как произведение A на вектор-столбец:

Следовательно, пространство столбцов матрицы A состоит из всех возможных произведений A x для x ∈ C n . Это то же самое, что и изображение (или диапазон ) соответствующего матричного преобразования .
Пример
Если , то векторы столбцов V 1 = [1, 0, 2] T и V 2 = [0, 1, 0] T . Линейная комбинация v 1 и v 2 – это любой вектор вида


Множество всех таких векторов столбцов пространство A . В этом случае пространство столбцов – это в точности набор векторов ( x , y , z ) ∈ R 3, удовлетворяющих уравнению z = 2 x (с использованием декартовых координат , этот набор представляет собой плоскость, проходящую через начало координат в трехмерном пространстве ).
Основа
Столбцы A охватывают пространство столбцов, но они не могут образовывать основу, если векторы столбцов не являются линейно независимыми . К счастью, элементарные операции со строками не влияют на отношения зависимости между векторами-столбцами. Это позволяет использовать сокращение строк, чтобы найти основу для пространства столбцов.
Например, рассмотрим матрицу

Столбцы этой матрицы охватывают пространство столбцов, но они не могут быть линейно независимыми , и в этом случае некоторое их подмножество будет составлять основу. Чтобы найти это основание, приведем A к сокращенной форме эшелона строк :

На данный момент ясно, что первый, второй и четвертый столбцы линейно независимы, а третий столбец представляет собой линейную комбинацию первых двух. (В частности, v 3 = −2 v 1 + v 2. ) Следовательно, первый, второй и четвертый столбцы исходной матрицы являются основой для пространства столбцов:

Обратите внимание, что независимые столбцы сокращенной формы эшелона строк – это в точности столбцы со сводными точками . Это позволяет определить, какие столбцы являются линейно независимыми, сводя их только к эшелонированной форме .
Вышеупомянутый алгоритм может использоваться в общем для поиска отношений зависимости между любым набором векторов и для выбора основы из любого связующего набора. Кроме того, найти основу для столбца пространства A эквивалентно нахождению основы для строки пространства транспонированной матрицы T .
Чтобы найти основу в практических условиях (например, для больших матриц), обычно используется разложение по сингулярным числам .
Измерение
Размерность пространства столбца называется рангом матрицы. Ранг равен количеству опорных точек в сокращенной форме эшелона строк и является максимальным количеством линейно независимых столбцов, которые могут быть выбраны из матрицы. Например, матрица 4 × 4 в приведенном выше примере имеет третий ранг.
Поскольку пространство столбцов является изображением соответствующего преобразования матрицы , ранг матрицы такой же, как размер изображения. Например, преобразование, описанное вышеприведенной матрицей, отображает все в какое-то трехмерное подпространство .


Дефектности матрицы представляет размерность нуль – пространства , и равно количеству столбцов в восстановленной форме строки эшелона , которые не имеют шарниров. Ранг и нулевое значение матрицы A с n столбцами связаны уравнением:

Это известно как теорема о ранге недействительности .
Отношение к левому пустому пространству
Левый нуль – пространство из А есть множество всех векторов х , такое , что х T A = 0 T . Это то же самое , как нуль – пространство в транспонированной из A . Произведение матрицы A T и вектора x может быть записано в терминах скалярного произведения векторов:
потому , что векторы – строки из A T являются транспонированные векторов – столбцов v K из A . Таким образом , Т х = 0 тогда и только тогда , когда х является ортогональным (перпендикулярным) к каждому из векторов – столбцов A .
Отсюда следует , что левое пространство нуля (нулевое пространство A T ) является ортогональным дополнением к колонку пространству A .
Для матрицы A пространство столбцов, пространство строк, пустое пространство и левое пустое пространство иногда называют четырьмя фундаментальными подпространствами .
Для матриц над кольцом
Точно так же пространство столбцов (иногда обозначаемое как пространство правого столбца) может быть определено для матриц над кольцом K как
для любого c 1 , …, c n , с заменой векторного m -пространства на « правый свободный модуль », который изменяет порядок скалярного умножения вектора v k на скаляр c k , так что он записывается в необычный вектор порядка – скаляр .
Место в строке
Определение
Пусть K является полем из скаляров . Пусть A – матрица размера m × n с векторами-строками r 1 , r 2 , …, r m . Линейная комбинация этих векторов является любой вектор вида
где c 1 , c 2 , …, c m – скаляры. Множество всех возможных линейных комбинаций г 1 , …, г м называются строкой пространства из A . То есть пространство строк A – это промежуток векторов r 1 , …, r m .
Например, если
тогда векторами-строками будут r 1 = [1, 0, 2] и r 2 = [0, 1, 0] . Линейная комбинация r 1 и r 2 – это любой вектор вида

Множество всех таких векторов строки пространство A . В этом случае пространство строк – это в точности набор векторов ( x , y , z ) ∈ K 3, удовлетворяющих уравнению z = 2 x (с использованием декартовых координат , этот набор представляет собой плоскость, проходящую через начало координат в трехмерном пространстве ).
Для матрицы, представляющей однородную систему линейных уравнений , пространство строк состоит из всех линейных уравнений, которые следуют из уравнений системы.
Столбец пространство A равно пространству строк A T .
Основа
Пространство строк не зависит от элементарных операций со строками . Это позволяет использовать сокращение строк, чтобы найти основу для пространства строк.
Например, рассмотрим матрицу
Строки этой матрицы охватывают пространство строк, но они не могут быть линейно независимыми , и в этом случае строки не будут базисом. Чтобы найти основу, сводим A к форме эшелона строки :
r 1 , r 2 , r 3 представляют собой строки.

Когда матрица находится в эшелонированной форме, ненулевые строки являются основой для пространства строк. В этом случае базис – {[1, 3, 2], [2, 7, 4]} . Другой возможный базис {[1, 0, 2], [0, 1, 0]} возникает в результате дальнейшего сокращения.
Этот алгоритм может использоваться в целом, чтобы найти основу для диапазона набора векторов. Если матрица дополнительно упрощается до уменьшенной формы эшелона строк , то результирующий базис однозначно определяется пространством строк.
Иногда вместо этого удобно найти основу для пространства строк из строк исходной матрицы (например, этот результат полезен для элементарного доказательства того, что детерминантный ранг матрицы равен ее рангу). Поскольку операции строк могут повлиять на линейную зависимость отношение векторов рядов, такой базис вместо найден косвенно используя тот факт , что столбец пространство A T равно пространство строк A . Используя приведенный выше пример матрицы A , найдите A T и приведите его к форме эшелона строк:

Оси показывают , что первые два столбца A T образуют базис в пространстве столбцов матрицы A T . Таким образом, первые два ряда A (до каких – либо сокращений строк) также образует основу строки пространства A .
Измерение
Измерение из строки пространства называется рангом матрицы. Это то же самое, что и максимальное количество линейно независимых строк, которые можно выбрать из матрицы, или, что то же самое, количество точек поворота. Например, матрица 3 × 3 в приведенном выше примере имеет ранг два.
Ранг матрицы также равен размеру пространства столбцов . Размерность нуль – пространства называется аннулированием матрицы, и связано с рангом по следующему уравнению:
где п есть число столбцов матрицы A . Вышеприведенное уравнение известно как теорема ранга-недействительности .
Отношение к нулевому пространству
Нуль – пространство матрицы A есть множество всех векторов х , для которого А х = 0 . Произведение матрицы A и вектора x может быть записано в терминах скалярного произведения векторов:
где R 1 , …, г м являются строки векторов A . Таким образом , х = 0 тогда и только тогда , когда х является ортогональным (перпендикулярным) к каждому из векторов – строк A .
Отсюда следует, что нулевое пространство A является ортогональным дополнением к пространству строк. Например, если пространство строки представляет собой плоскость, проходящую через начало координат в трех измерениях, то пустое пространство будет перпендикулярной линией, проходящей через начало координат. Это обеспечивает доказательство теоремы о ранге-недействительности (см. Размерность выше).
Пространство строк и пустое пространство – это два из четырех основных подпространств, связанных с матрицей A (два других – пространство столбцов и оставшееся пустое пространство ).
Отношение к coimage
Если V и W являются векторные пространства , то ядро из линейного преобразования Т : V → W есть множество векторов v ∈ V , для которых Т ( v ) = 0 . Ядро линейного преобразования аналогично пустому пространству матрицы.
Если V – внутреннее пространство продукта , то ортогональное дополнение к ядру можно рассматривать как обобщение пространства строк. Это иногда называют кообраз из T . Преобразование Т взаимно однозначно на его кообраз и кообраз отображает изоморфно на изображение из T .
Когда V не является внутренним пространством продукта, кообраз T может быть определен как фактор-пространство V / ker ( T ) .
Смотрите также
- Евклидово подпространство
Ссылки и примечания
дальнейшее чтение
- Антон, Ховард (1987), Элементарная линейная алгебра (5-е изд.), Нью-Йорк: Wiley , ISBN 0-471-84819-0
- Акслер, Шелдон Джей (1997), Linear Algebra Done Done Right (2-е изд.), Springer-Verlag, ISBN 0-387-98259-0
- Банерджи, Судипто; Рой, Аниндья (6 июня 2014 г.), Линейная алгебра и матричный анализ для статистики (1-е изд.), CRC Press, ISBN 978-1-42-009538-8
- Beauregard, Raymond A .; Фрали, Джон Б. (1973), Первый курс линейной алгебры: с дополнительным введением в группы, кольца и поля , Бостон: Houghton Mifflin Company , ISBN 0-395-14017-X
- Лэй, Дэвид К. (22 августа 2005 г.), Линейная алгебра и ее приложения (3-е изд.), Аддисон Уэсли, ISBN 978-0-321-28713-7
- Леон, Стивен Дж. (2006), Линейная алгебра с приложениями (7-е изд.), Пирсон Прентис Холл
- Мейер, Карл Д. (15 февраля 2001 г.), Матричный анализ и прикладная линейная алгебра , Общество промышленной и прикладной математики (SIAM), ISBN 978-0-89871-454-8, Архивируются с оригинала на 1 марта 2001
- Пул, Дэвид (2006), Линейная алгебра: современное введение (2-е изд.), Брукс / Коул, ISBN 0-534-99845-3
- Стрэнг, Гилберт (19 июля 2005 г.), Линейная алгебра и ее приложения (4-е изд.), Брукс Коул, ISBN 978-0-03-010567-8
внешние ссылки
- Вайсштейн, Эрик В. «Пространство рядов» . MathWorld .
- Вайсштейн, Эрик В. «Колонное пространство» . MathWorld .
-
Гилберт Стрэнг , Лекция по линейной алгебре Массачусетского технологического института по четырем фундаментальным подпространствам в Google Video, из MIT OpenCourseWare
- Видеоурок Khan Academy
- Лекция Гилберта Стрэнга из Массачусетского технологического института о пространстве столбцов и нулевом пространстве
- Пространство строк и столбцов
и линейные
операторы
23.1. Линейное пространство, определение и примеры
Пусть
F
– множество всех действительных чисел
R
или множество всех комплексных чисел
C.
Множество
V
элементов x, y, z, …
называется линейным
(векторным) пространством
над числовым множеством F,
если для каждых двух элементов x
и y
из V
определена их сумма
![]() для каждого
для каждого![]() и каждого числа
и каждого числа![]() определено их произведение
определено их произведение![]() причем выполняются следующие аксиомы:
причем выполняются следующие аксиомы:
А1) ![]()
![]() –коммутативность
–коммутативность
сложения;
А2) ![]()
![]() –ассоциативность
–ассоциативность
сложения;
А3) существует
такой элемент
![]() называемыйнулевым,
называемыйнулевым,
что х
+ 0 = х,
![]()
А4) для
каждого элемента
![]() существует такой элемент
существует такой элемент![]() называемыйпротивоположным
называемыйпротивоположным
к x,
что
![]()
А5)
![]()
![]()
![]()
А6)
![]() для всех
для всех![]() и
и![]()
А7)
![]()
![]()
![]()
А8)
![]()
![]()
![]()
Элементы
линейного (векторного) пространства
называются векторами.
Если F
– множество действительных чисел R
или множество комплексных чисел C,
то векторное пространство V
над множеством F
называется соответственно действительным
или комплексным
линейным пространством. Далее, в основном,
будут рассматриваться действительные
линейные пространства.
Векторы
![]() линейного пространстваV
линейного пространстваV
называются линейно-зависимыми,
если существуют числа
![]() не все равные нулю, такие, что
не все равные нулю, такие, что
![]() (23.1)
(23.1)
Векторы
![]() называютсялинейно-независимыми,
называютсялинейно-независимыми,
если равенство (23.1) выполняется только
при условии
![]()
Вектор
x
разлагается по векторам (линейно
выражается) через
векторы
![]() если
если![]() Если векторы
Если векторы![]() линейно-зависимы, то хотя бы один из них
линейно-зависимы, то хотя бы один из них
линейно выражается через остальные.
Линейно-независимая
система векторов
![]() называетсябазисом
называетсябазисом
пространства, если любой вектор этого
пространства разлагается по векторам
![]() Линейное пространство называетсяконечномерным,
Линейное пространство называетсяконечномерным,
если его базис состоит из конечного
количества векторов, и бесконечномерным
– в противном случае.
Количество
n
векторов базиса конечномерного
пространства V
называется размерностью
пространства V,
что записывают
![]() или
или![]() где
где![]()
Каждую
линейно-независимую систему векторов
![]()
![]() конечномерного пространства
конечномерного пространства![]() можно дополнить до базиса
можно дополнить до базиса![]()
Если
![]() – базис пространства
– базис пространства![]() то любой векторx
то любой векторx
из
![]() имеет единственное разложение
имеет единственное разложение
![]() (23.2)
(23.2)
Числа
![]() называютсякоординатами
называютсякоординатами
вектора x
в базисе
![]()
![]() при этом записывают
при этом записывают![]()
Если
некоторое подмножество
![]() само образует линейное пространство
само образует линейное пространство
относительно введенных вV
операций сложения и умножения на число,
то
![]() называетсяподпространством
называетсяподпространством
линейного
пространства V.
Пусть
![]() – множество всех матриц-строк, имеющихn
– множество всех матриц-строк, имеющихn
элементов, с обычными операциями сложения
матриц и умножения матрицы на число:
а)
![]()
б)
![]()
![]()
![]()
Для
этого множества выполняются аксиомы
А1)–А8). Следовательно, это множество
является линейным пространством. Строки
![]() образуют базис этого пространства,
образуют базис этого пространства,
поэтому оноn–мерно.
Построенное пространство называется
арифметическим
или координатным
линейным пространством
и обозначается
![]()
Теорема.
Пусть
![]() – линейное пространство размерностиn.
– линейное пространство размерностиn.
Тогда существует взаимно-однозначное
соответствие между
![]() и координатным пространством
и координатным пространством![]()
![]()
Из
этой теоремы следует, что при изучении
свойств пространства
![]() достаточно рассмотреть
достаточно рассмотреть
соответствующие свойства пространства
![]()
Пример
1.
Показать, что множество всех многочленов
![]() образует линейное пространство, найти
образует линейное пространство, найти
базис и определить размерность
пространства![]() всех многочленов с коэффициентами из
всех многочленов с коэффициентами из
множества![]() степень которых не превосходитn.
степень которых не превосходитn.
Решение.
Нетрудно проверить, что множество всех
таких многочленов образует линейное
пространство относительно обычных
операций сложения многочленов и умножения
многочлена на число, т. е. выполняются
аксиомы А1)–А8). Рассмотрим произвольный
многочлен
![]() тогда
тогда![]()
![]()
![]() Следовательно,
Следовательно,![]() линейно выражается через многочлены
линейно выражается через многочлены![]() При этом
При этом![]() тогда и только тогда, когда
тогда и только тогда, когда![]() т. е.
т. е.![]() – линейно-независимые векторы, они
– линейно-независимые векторы, они
образуют базис векторного пространства![]() причем
причем![]()
Пример
2.
Определить размерность линейного
пространства всех действительных
функций F(R)
с обычными операциями сложения функций
и произведения функции на число.
Решение.
Непосредственно проверяются аксиомы
А1)–А8) линейного пространства,
следовательно F(R)
является векторным пространством.
Далее, функции
![]() являются линейно-независимыми
являются линейно-независимыми
векторами для любогоn,
т. е.
F(R)
не имеет конечного базиса и является
бесконечномерным.
Пример
3.
Доказать, что множество M(m, n)
всех прямоугольных действительных
(размера
![]() )
)
матриц с обычными операциями сложения
матриц и умножения матрицы на число
является линейным пространством. Найти
его размерность.
Решение.
Поскольку выполняются аксиомы А1)–А8),
то
M(m, n)
– линейное пространство (убедитесь в
этом самостоятельно).
Рассмотрим
матрицу
![]()
![]() в которой элемент, стоящий вi-й
в которой элемент, стоящий вi-й
строке и j-м
столбце, равен 1, а все остальные элементы
равны нулю. Всего таких матриц будет
![]() Для любой матрицы
Для любой матрицы![]() имеем:
имеем:![]() Из этого равенства следует, что любая
Из этого равенства следует, что любая
матрицаА
линейно выражается через матрицы
![]() Если
Если![]() (нулевая матрица), то
(нулевая матрица), то![]()
![]() Следовательно, векторы
Следовательно, векторы![]() – линейно-независимы и образуют базис
– линейно-независимы и образуют базис
векторного пространстваM(m, n).
Таким образом, размерность этого
пространства равна
![]() В частности, для квадратных матриц
В частности, для квадратных матриц
порядкаn
она равна
![]()
Пример
4.
Доказать, что множество всех геометрических
векторов
в трехмерном пространстве образует
трехмерное векторное пространство V.
Решение.
Если рассмотреть в трехмерном пространстве
декартову систему
координат с соответствующими ортами
![]()
![]()
![]() то любой вектор
то любой вектор![]() единственным образом разлагается по
единственным образом разлагается по![]()
![]()
В
стандартном курсе векторной алгебры
показывается, что операции сложения
векторов и умножения вектора на
действительное число
![]() удовлетворяют аксиомам А1)–А8). Поэтому
удовлетворяют аксиомам А1)–А8). Поэтому
множество всех геометрических векторовV
образует линейное пространство.
Очевидно,
что в случае равенства
![]() выполняется
выполняется![]() и векторы
и векторы![]() – линейно-независимы. Таким образом,
– линейно-независимы. Таким образом,
пространствоV
имеет размерность 3 и отождествляется
с
![]() если задан базис
если задан базис![]()
Пример
5.
Описать геометрически все подпространства
линейного пространства
![]()
Решение.
Любое векторное пространство V
имеет два тривиальных
подпространства V
и
![]() Если
Если![]() – подпространство пространства
– подпространство пространства![]() то в
то в![]() имеется максимальная система
имеется максимальная система
линейно-независимых векторов, предположим,
чтоm
– число векторов этой системы. Если
![]() то
то![]() если
если![]() то
то![]() Если
Если![]() то
то![]() отожествляется с множеством всех
отожествляется с множеством всех
векторов некоторой прямой, проходящей
через начало координат. В случае![]() множество
множество![]() можно считать множеством всех векторов
можно считать множеством всех векторов
плоскости, проходящей через начало
координат. Всевозможные такие прямые
и плоскости геометрически и описывают
все нетривиальные подпространства
пространства![]()
Пример
6.
Доказать, что векторы
![]()
![]() и
и![]() образуют базис пространства
образуют базис пространства![]() и найти координаты вектора
и найти координаты вектора![]() в этом базисе.
в этом базисе.
Решение.
Как известно из векторной алгебры, базис
в
![]() образует всякая тройка векторов, для
образует всякая тройка векторов, для
которой смешанное произведение не равно
нулю. Вычислим его для заданных векторов:

Мы
убедились, что векторы
![]() и
и![]() образуют базис. Чтобы определить
образуют базис. Чтобы определить
координаты вектора![]() разложим его по векторам этого базиса.
разложим его по векторам этого базиса.
Предположим, что
![]()
или в координатной
форме
![]()
В
координатной форме последнее равенство
равносильно системе уравнений:

Для
нахождения неизвестных коэффициентов
![]() решим систему методом Крамера. Вычислим
решим систему методом Крамера. Вычислим
определитель этой системы

Далее
находим

Используя
формулы Крамера, находим:
![]()
![]()
![]()
Таким
образом в базисе
![]() справедливо разложение
справедливо разложение![]() т. е.
т. е.![]()
Задания
Соседние файлы в папке Часть 5
- #
- #
- #
- #
- #
- #
