Формула частоты в физике
Формула частоты
Определение
Частота – это физический параметр, которые используют для характеристики периодических процессов.
Частота равна количеству повторений или свершения событий в единицу времени.
Чаще всего в физике частоту обозначают буквой $nu ,$ иногда встречаются другие обозначения частоты, например $f$ или $F$.
Частота (наряду со временем) является самой точно измеряемой величиной.
Формула частоты колебаний
При помощи частоты характеризуют колебания. В этом случае частота является физической величиной обратной периоду колебаний $(T).$
[nu =frac{1}{T}left(1right).]
Частота, в этом случае – это число полных колебаний ($N$), совершающихся за единицу времени:
[nu =frac{N}{Delta t}left(2right),]
где $Delta t$ – время за которое происходят $N$ колебаний.
Единицей измерения частоты в Международной системе единиц (СИ) служат в герцы или обратные секунды:
[left[nu right]=с^{-1}=Гц.]
Герц – это единица измерения частоты периодического процесса, при которой за время равное одной секунде происходит один цикл процесса. Единица измерения частоты периодического процесса получила свое наименование в честь немецкого ученого Г. Герца.
Частота биений, которые возникают при сложении двух колебаний, происходящих по одной прямой с разными, но близкими по величине частотами (${nu }_1 и {nu }_2$) равна:
[{nu =nu }_1- {nu }_2left(3right).]
Еще одно величиной характеризующей колебательный процесс является циклическая частота (${omega }_0$), связанная с частотой как:
[{omega }_0=2pi nu left(4right).]
Циклическая частота измеряется в радианах, деленных на секунду:
[left[{omega }_0right]=frac{рад}{с}.]
Частота колебаний тела, имеющего массу$ m,$ подвешенного на пружине с коэффициентом упругости $k$ равна:
[nu =frac{1}{2pi sqrt{{m}/{k}}}left(5right).]
Формула (4) верна для упругих, малых колебаний. Кроме того масса пружины должна быть малой по сравнению с массой тела, прикрепленного к этой пружине.
Для математического маятника частоту колебаний вычисляют как: длина нити:
[nu =frac{1}{2pi sqrt{{l}/{g}}}left(6right),]
где $g$ – ускорение свободного падения; $ l$ – длина нити (длина подвеса) маятника.
Физический маятник совершает колебания с частотой:
[nu =frac{1}{2pi sqrt{{J}/{mgd}}}left(7right),]
где $J$ – момент инерции тела, совершающего колебания относительно оси; $d$ – расстояние от центра масс маятника до оси колебаний.
Формулы (4) – (6) приближенные. Чем меньше амплитуда колебаний, тем точнее значение частоты колебаний, вычисляемых с их помощью.
Формулы для вычисления частоты дискретных событий, частота вращения
дискретных колебаний ($n$) – называют физическую величину, равную числу действий (событий) в единицу времени. Если время, которое занимает одно событие обозначить как $tau $, то частота дискретных событий равна:
[n=frac{1}{tau }left(8right).]
Единицей измерения частоты дискретных событий является обратная секунда:
[left[nright]=frac{1}{с}.]
Секунда в минус первой степени равна частоте дискретных событий, если за время, равное одной секунде происходит одно событие.
Частотой вращения ($n$) – называют величину, равную количеству полных оборотов, которое совершает тело в единицу времени. Если $tau $ – время, затрачиваемое на один полный оборот, то:
[n=frac{1}{tau }left(9right).]
Примеры задач с решением
Пример 1
Задание. Колебательная система совершила за время равное одной минуте ($Delta t=1 мин$) 600 колебаний. Какова частота этих колебаний?
Решение. Для решения задачи воспользуемся определением частоты колебаний: Частота, в этом случае – это число полных колебаний, совершающихся за единицу времени.
[nu =frac{N}{Delta t}left(1.1right).]
Прежде чем переходить к вычислениям, переведем время в единицы системы СИ: $Delta t=1 мин=60 с$. Вычислим частоту:
[nu =frac{600}{60}=10 left(Гцright).]
Ответ. $nu =10Гц$
Пример 2
Задание. На рис.1 изображен график колебаний некоторого параметра $xi (t)$, Какова амплитуда и частота колебаний этой величины?
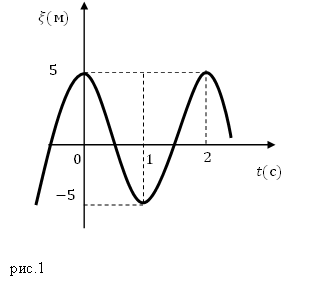
Решение. Из рис.1 видно, что амплитуда величины $xi left(tright)={xi }_{max}=5 (м)$. Из графика получаем, что одно полное колебание происходит за время, равное 2 с, следовательно, период колебаний равен:
[T=2 left(cright).]
Частота – величина обратная периоду колебаний, значит:
[nu =frac{1}{T}=0,5 left(Гцright).]
Ответ. 1) ${xi }_{max}=5 (м)$. 2) $nu =0,5$ Гц
Читать дальше: формулы математического маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 28 июля 2022 года; проверки требует 1 правка.
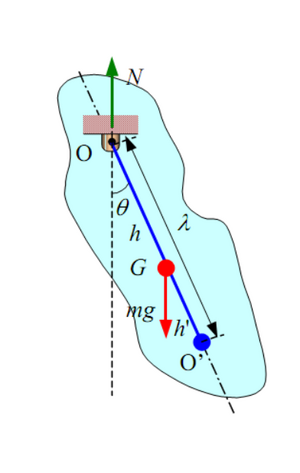
Физи́ческий ма́ятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Дифференциальное уравнение движения физического маятника[править | править код]
Момент инерции относительно оси, проходящей через точку подвеса, по теореме Штейнера:
 ,
,

где  — момент инерции относительно оси, проходящей через центр тяжести;
— момент инерции относительно оси, проходящей через центр тяжести;  — эффективный радиус инерции относительно оси, проходящей через центр тяжести.
— эффективный радиус инерции относительно оси, проходящей через центр тяжести.
Динамическое уравнение произвольного вращения твёрдого тела:
- ,

где  — суммарный момент сил, действующих на тело относительно оси вращения.
— суммарный момент сил, действующих на тело относительно оси вращения.
- ,

где  — момент сил, вызванный силой тяжести;
— момент сил, вызванный силой тяжести;  — момент сил, вызванный силами трения среды.
— момент сил, вызванный силами трения среды.
Момент, вызванный силой тяжести, зависит от угла отклонения тела от положения равновесия:
- .

Если пренебречь сопротивлением среды, дифференциальное уравнение колебаний физического маятника в поле силы тяжести:
- .

Если разделить обе части уравнения на  и положить
и положить
- ,

получим:
- .

Такое уравнение аналогично уравнению колебаний математического маятника длиной  . Величина называется приведённой длиной физического маятника.
. Величина называется приведённой длиной физического маятника.
Центр качания физического маятника. Теорема Гюйгенса[править | править код]
Центр качания — точка, в которой надо сосредоточить всю массу физического маятника, чтобы его период колебаний не изменился.
Поместим на луче, проходящем от точки подвеса через центр тяжести, точку на расстоянии от точки подвеса. Эта точка и будет центром качания маятника.
Действительно, если всю массу сосредоточить в центре качания, то центр качания будет совпадать с центром тяжести. Тогда момент инерции относительно оси подвеса будет равен  , а момент силы тяжести относительно той же оси
, а момент силы тяжести относительно той же оси  . При этом уравнение движения не изменится.
. При этом уравнение движения не изменится.
Согласно теореме Гюйгенса,
Если физический маятник подвесить за центр качания, то его период колебаний не изменится, а прежняя точка подвеса сделается новым центром качания.
Вычислим приведённую длину для нового маятника:
- .

Совпадение приведённых длин для двух случаев и доказывает утверждение, сделанное в теореме.
Период колебаний физического маятника[править | править код]
Наиболее общий случай[править | править код]
Для того, чтобы найти период колебаний физического маятника, необходимо решить уравнение качания.
Для этого умножим левую  и правую часть этого уравнения на
и правую часть этого уравнения на  . Тогда:
. Тогда:
- .

Интегрируя это уравнение, получаем:
- ,

где  — произвольная постоянная. Её можно найти из условия, что в ситуациях, когда
— произвольная постоянная. Её можно найти из условия, что в ситуациях, когда  , должно быть
, должно быть  (
( — максимальный угол отклонения). Получаем:
— максимальный угол отклонения). Получаем:

Подставляем и преобразовываем получившееся уравнение:

Отделяем переменные и интегрируем это уравнение:
- .

Удобно сделать замену переменной полагая  . Тогда искомое уравнение принимает вид:
. Тогда искомое уравнение принимает вид:

Здесь  — нормальный эллиптический интеграл Лежандра 1-го рода. Для периода колебаний получаем формулу:
— нормальный эллиптический интеграл Лежандра 1-го рода. Для периода колебаний получаем формулу:

Здесь  — полный нормальный эллиптический интеграл Лежандра 1-го рода. Раскладывая его в ряд, можно получить удобную для практических вычислений формулу:
— полный нормальный эллиптический интеграл Лежандра 1-го рода. Раскладывая его в ряд, можно получить удобную для практических вычислений формулу:
![{displaystyle T=2pi {sqrt {frac {lambda }{g}}}left{1+left({frac {1}{2}}right)^{2}sin ^{2}left({frac {alpha }{2}}right)+left({frac {1cdot 3}{2cdot 4}}right)^{2}sin ^{4}left({frac {alpha }{2}}right)+dots +left[{frac {left(2n-1right)!!}{left(2nright)!!}}right]^{2}sin ^{2n}left({frac {alpha }{2}}right)+dots right}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aae1c69041f6957ab485b97bcbe5025dc688c47a)
Период малых колебаний физического маятника[править | править код]
Если  — случай малых максимальных угловых отклонений от равновесия
— случай малых максимальных угловых отклонений от равновесия  — то
— то  так как разложение синуса в ряд Маклорена
так как разложение синуса в ряд Маклорена  и уравнения движения переходит в уравнение гармонического осциллятора без трения:
и уравнения движения переходит в уравнение гармонического осциллятора без трения:

Период колебания маятника в этом случае:

В иной формулировке: если амплитуда колебаний мала, то корень в знаменателе эллиптического интеграла приближённо равен единице. Такой интеграл легко берётся, и получается хорошо известная формула малых колебаний:

Эта формула даёт результаты приемлемой точности (ошибка менее 1 %) при углах, не превышающих 4°.
Следующий порядок приближения можно использовать с приемлемой точностью (ошибка менее 1 %) при углах отклонения до 1 радиана (≈57°):

См. также[править | править код]
- Математический маятник
- Маятник Дубошинского
Ссылки[править | править код]
- маятник — статья из Большой советской энциклопедии.
Частота колебаний — величина, обратная периоду колебаний, т. е. равная числу периодов колебаний (числу колебаний), совершаемых в единицу времени.

Разновидность частот колебаний :
Циклическая частота 
Частота колебаний физического маятника 
Частота пружинного маятника 
Частота математического маятника 
Частота электромагнитных колебаний 
Частота колебаний крутильного маятника 

В Формуле мы использовали :
 — Частота колебаний
— Частота колебаний
 — Циклическая частота
— Циклическая частота
 — Период колебаний маятника
— Период колебаний маятника
 — Масса груза, или масса маятника
— Масса груза, или масса маятника
 — Жесткость пружины
— Жесткость пружины
 — Длина подвеса
— Длина подвеса
 — Ускорение свободного падения
— Ускорение свободного падения
 — Момент инерции маятника относительно оси вращения
— Момент инерции маятника относительно оси вращения
 — Расстояние от оси вращения до центра масс
— Расстояние от оси вращения до центра масс
 — Момент инерции тела
— Момент инерции тела
 — Вращательный коэффициент жёсткости маятника
— Вращательный коэффициент жёсткости маятника
18 Понятие колебательного движения.
Период и частота колебаний
Колеба́ния —
повторяющийся в той или иной степени
во времени
процесс изменения состояний системы
около точки равновесия. Например, при
колебаниях маятника
повторяются отклонения его в ту и другую
сторону от вертикального положения;
при колебаниях в электрическом
колебательном
контуре повторяются величина
и направление тока,
текущего через катушку.
Колебания
почти всегда связаны с попеременным
превращением энергии
одной формы проявления в другую форму.
Колебания
различной физической природы имеют
много общих закономерностей и тесно
взаимосвязаны c волнами.
Поэтому исследованиями этих закономерностей
занимается обобщённая теория
колебаний и волн. Принципиальное
отличие от волн: при колебаниях не
происходит переноса энергии, это, так
сказать, «местные» преобразования
энергии.
Выделение
разных видов колебаний зависит от
подчёркиваемых свойств колеблющихся
систем (осцилляторов)
[править]
По физической природе
-
Механические
(звук,
вибрация) -
Электромагнитные
(свет,
радиоволны,
тепловые) -
Смешанного
типа —
комбинации вышеперечисленных
[править]
По характеру взаимодействия с окружающей
средой
-
Вынужденные —
колебания, протекающие в системе под
влиянием внешнего периодического
воздействия. Примеры: листья на деревьях,
поднятие и опускание руки. При вынужденных
колебаниях может возникнуть явление
резонанса:
резкое возрастание амплитуды колебаний
при совпадении собственной
частоты
осциллятора
и частоты внешнего воздействия. -
Свободные
(или собственные) —
это колебания в системе под действием
внутренних сил, после того как система
выведена из состояния равновесия (в
реальных условиях свободные колебания
всегда затухающие).
Простейшими примерами свободных
колебания являются колебания груза,
прикреплённого к пружине, или груза,
подвешенного на нити. -
Автоколебания —
колебания, при которых система имеет
запас потенциальной
энергии,
расходующейся на совершение колебаний
(пример такой системы — механические
часы).
Характерным отличием автоколебаний
от свободных колебаний является, то
что их амплитуда определяется свойствами
самой системы, а не начальными условиями. -
Параметрические —
колебания, возникающие при изменении
какого-либо параметра колебательной
системы в результате внешнего воздействия. -
Случайные —
колебания, при которых внешняя или
параметрическая нагрузка является
случайным процессом.
[править]
Характеристики
-
Амплитуда —
максимальное отклонение колеблющейся
величины от некоторого усреднённого
её значения для системы,

(м) -
Период —
промежуток времени, через который
повторяются какие-либо показатели
состояния системы (система совершает
одно полное колебание),

(сек) -
Частота —
число колебаний в единицу времени,
(Гц,
сек−1).
Период
колебаний
и
частота
—
обратные величины;
![]()
и
![]()
В
круговых или циклических процессах
вместо характеристики «частота»
используется понятие круговая
(циклическая)
частота
![]()
(рад/сек,
Гц, сек−1),
показывающая число колебаний за 2π
единиц времени:
![]()
-
Смещение
— отклонение тела от положения
равновесия. Обозначение Х, Единица
измерения метр. -
Фаза
колебаний —
определяет смещение в любой момент
времени, то есть определяет состояние
колебательной системы.
19 Гармонические
колебания. Векторная диаграмма
гармонического колебания. Циклическая
частота, фаза, начальная фаза
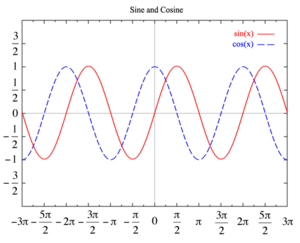
Гармоническое
колебание —
явление периодического изменения
какой-либо величины, при котором
зависимость от аргумента имеет характер
функции синуса или косинуса. Например,
гармонически колеблется величина,
изменяющаяся во времени следующим
образом:
x(t)
= Asin(ωt
+ φ)
или
x(t)
= Acos(ωt
+ φ),
![]()
Графики
функций f(x)
= sin(x)
и g(x)
= cos(x)
на декартовой плоскости.
где
х —
значение изменяющейся величины, t —
время, остальные параметры – постоянные:
А —
амплитуда колебаний, ω —
циклическая частота колебаний, (ωt
+ φ) — полная фаза колебаний,
![]()
—
начальная фаза колебаний.
Обобщенное
гармоническое колебание в дифференциальном
виде
![]()
(Любое
нетривиальное
решение этого дифференциального
уравнения – есть гармоническое колебание
с циклической частотой ω.)
Способ
векторных диаграмм.
Пусть величина х изменяется со временем
по закону
![]()
На
плоскости выбирают произвольно
направленную координатную ось Ох.
Из начала координат под углом
![]()
равным
начальной фазе колебаний, проводят
вектор
![]()
,
модуль которого равен амплитуде
гармонического колебания A (рис. 13.5).
Если вектор
вращается
вокруг точки О с постоянной угловой
скоростью
![]()
против
часовой стрелки, то угол
![]()
между
вращающимся вектором и осью Ох
в любой момент времени определится
выражением
![]()
Проекция
конца вектора
будет
перемещаться по оси Ох
и принимать значения от —А до +А, а
колеблющаяся величина будет изменяться
со временем по закону
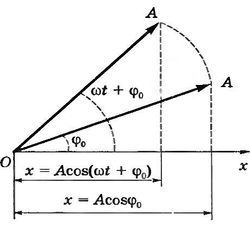
Рис.
13.5
Таким
образом, гармоническое колебание можно
представить проекцией на некоторую
произвольно выбранную ось вектора
амплитуды
,
отложенного от произвольной точки оси
под углом
![]()
,
равным начальной фазе, и вращающегося
с угловой скоростью
вокруг
этой точки.
Циклическая частота
колебний (ω) – число колебаний за 2π
секунд.
–
связь циклической частоты с частотой
колебаний и периодом.
Циклическая
частота в уравнениях колебаний:
![]()
![]()
–
циклическая частота колебаний
математического маятника.
Фа́за
колеба́ний —
физическая величина, при заданной
амплитуде
и коэффициенте
затухания,
определяющая состояние колебательной
системы в любой момент времени.[1]
Если колебания системы описываются
синусоидальным (косинусоидальным) или
экспоненциальным законами:
Acos(ωt
+ φ0),
Asin(ωt
+ φ0),
![]()
,
то
фаза колебаний определяется как аргумент
периодической функции,
описывающей гармонический колебательный
процесс (ω— угловая
частота
(чем величина выше, тем на большее
значение изменяется угол за ед. времени),
t—
время,
φ0—
(угол в начале колебаний) начальная фаза
колебаний, то есть фаза колебаний в
начальный момент времени t
= 0).
Фаза
обычно выражается в угловых единицах
(радианах,
градусах)
или в циклах
(долях периода):
1
цикл = 2π радиан = 360 градусов.
Строго
говоря, этот термин относится только к
колебаниям, но его также применяют и к
другим периодическим и квазипериодическим
процессам.
20 Гармонические
колебания под действием упругой силы
(вывод закона Гука)
Пружинный
маятник состоит из пружины и массивного
шара, насаженного на горизонтальный
стержень, вдоль которого он может
скользить. Пусть на пружине укреплен
шарик с отверстием, который скользит
вдоль направляющей оси (стержня). На
рис. 7.2,а показано положение шара в
состоянии покоя; на рис. 7.2,б – максимальное
сжатие и на рис. 7.2,в -произвольное
положение шарика.

Под
действием возвращающей силы, равной
силе сжатия, шарик будет совершать
колебания. Сила сжатия F = -kx , где k –
коэффициент жесткости пружины. Знак
минус показывает, что направление силы
F и смещение х противоположны. Потенциальная
энергия сжатой пружины
![]()
кинетическая
![]()
.
Для
вывода уравнения движения шарика
необходимо связать х и t. Вывод основывается
на законе сохранения энергии. Полная
механическая энергия равна сумме
кинетической и потенциальной энергии
системы. В данном случае :
![]()
.
В
положении б)
![]()
:
![]()
.
Так
как в рассматриваемом движении выполняется
закон сохранения механической энергии,
можно записать:
![]()
.
Определим
отсюда скорость:
![]()
Но
в свою очередь
![]()
и,
следовательно,
![]()
.
Разделим
переменные

.
Интегрируя
это выражение, получим:
![]()
,
где
![]()
–
постоянная интегрирования.
Из
последнего следует, что
|
|
(7.2) |

Сравнивая
(7.1) с (7.2), получаем
|
|
(7.3) |
Таким
образом, под действием упругой силы
тело совершает гармонические колебания.
Силы иной природы, чем упругие, но в
которых выполняется условие F = -kx,
называются квазиупругими. Под действием
этих сил тела тоже совершают гармонические
колебания. При этом:
|
смещение: |
|
|
скорость: |
|
|
ускорение: |
|
Сила
упругости, возникающая в теле при его
деформации, прямо пропорциональна
величине этой деформации
Для
тонкого растяжимого стержня закон Гука
имеет вид:
![]()
Здесь
F — сила натяжения стержня, Δl —
абсолютное удлинение (сжатие) стержня,
а k называется коэффициентом
упругости (или жёсткости).
Коэффициент
упругости зависит как от свойств
материала, так и от размеров стержня.
Можно выделить зависимость от размеров
стержня (площади поперечного сечения
S и длины L) явно, записав коэффициент
упругости как
![]()
Величина
E называется Модулем
упругости первого рода или модулем Юнга
и является механической характеристикой
материала.
Если
ввести относительное удлинение
![]()
и
нормальное напряжение в поперечном
сечении
![]()
то
закон Гука в относительных единицах
запишется как
![]()
В
такой форме он справедлив для любых
малых объёмов вещества.
Также
при расчёте прямых стержней применяют
запись закона Гука в относительной
форме
![]()
Следует
иметь в виду, что закон Гука выполняется
только при малых деформациях. При
превышении предела
пропорциональности связь между
напряжениями и деформациями становится
нелинейной. Для многих сред закон Гука
неприменим даже при малых деформациях.
21 Циклическая частота
и период колебаний под действием упругой
силы. Энергия колебания.
ЧАСТИЧНО НЕ НАЙДЕНО
При
механических
колебаниях колеблющееся тело (или
материальная точка) обладает кинетической
и потенциальной энергией. Кинетическая
энергия тела W:
![]()
(Скорость
тела v
= ds/dt)
Для
вычисления потенциальной энергии тела
воспользуемся самой общей формулой,
связывающей силу и потенциальную энергию
тела в поле этой силы:

где
U – потенциальная энергия, набираемая
(или теряемая) телом, движущимся в силовом
поле F от точки 0 (точки, в которой
потенциальная энергия принимается
равной 0) до точки х.
Для
силы, линейно зависящей от смещения
(как в случае наших механических
маятников, такие силы носят общее
название квазиупругих сил) мы имеем:
![]()
![]()
![]()
![]()
|
для |
1.
Полная механическая энергия тела не
изменяется при колебаниях:
![]()
2.
Частота колебаний кинетической и
потенциальной энергии в 2 раза больше
частоты колебаний маятника.
3.
Колебания кинетической и потенциальной
энергии сдвинуты друг относительно
друга по фазе на
(на полпериода). Когда кинетическая
энергия достигает максимума, потенциальная
– минимума (нуля) и наоборот. Энергия при
колебаниях постоянно перекачивается
из потенциальной в кинетическую и
обратно.
В
случае электрических колебаний энергия
в конуре представляет собой сумму
энергии электрического поля, запасенной
между обкладками конденсатора, и энергии
магнитного поля, запасенной в катушке
с индуктивностью. Вычислим обе
составляющие.
![]()
![]()
Сравнивая
эти формулы, можно сделать следующие
выводы:
1.
Полная энергия в контуре остается
неизменной:
![]()
2.
Частота колебаний энергий в 2 раза
превосходит частоту колебаний заряда
и тока в контуре.
3. Электрическая и
магнитная энергии сдвинуты по фазе на
полпериода друг относительно друга;
происходит непрерывное перекачивание
энергии из одной формы в другую и обратно.
Поскольку
в контуре происходят колебания
электрической и магнитной энергий,
электрический колебательный контур
также называют электромагнитным.
22 Сложение одинокого
направленных гармонических колебаний.
Колеблющееся
тело может принимать участие в нескольких
колебательных процессах, тогда следует
найти результирующее колебание, другими
словами, колебания необходимо сложить.
В данном разделе будем складывать
гармонические колебания одного
направления и одинаковой частоты
![]()
применяя
метод вращающегося вектора амплитуды,
построим графически векторные диаграммы
этих колебаний (рис. 1). Tax как векторы A1
и A2
вращаются с одинаковой угловой скоростью
ω0,
то разность фаз (φ2
– φ1)
между ними будет оставаться постоянной.
Значит, уравнение результирующего
колебания будет
![]()
(1)
В формуле (1) амплитуда А и начальная
фаза φ соответственно определяются
выражениями
![]()
(2)
![]()
Значит,
тело, участвуя в двух гармонических
колебаниях одного направления и
одинаковой частоты, совершает при этом
также гармоническое колебание в том же
направлении и с той же частотой, что и
складываемые колебания. Амплитуда
результирующего колебания зависит от
разности фаз (φ2
– φ1)
складываемых колебаний.

Рис.1
Исследуем
выражение (2) в зависимости от разности
фаз (φ2
– φ1):
1) φ2
– φ1
= ±2mπ (m = 0, 1, 2, …), тогда A=A1+A2,
т. е. амплитуда результирующего колебания
А будет равна сумме амплитуд складываемых
колебаний;
2) φ2
– φ1
= ±(2m+1)π (m = 0, 1, 2, …), тогда A=|A1–A2|,
т. е. амплитуда результирующего колебания
будет равна разности амплитуд складываемых
колебаний.
Для практики представляет
особый интерес случай, когда два
складываемых гармонических колебания
одинакового направления мало отличаются
по частоте. После сложения этих колебаний
получаются колебания с периодически
изменяющейся амплитудой. Периодические
изменения амплитуды колебания, которые
возникают при сложении двух гармонических
колебаний с близкими частотами, называются
биениями.
Пусть амплитуды складываемых
колебаний равны А, а частоты равны ω и
ω+Δω, причем Δω<<ω. Выберем начало
отсчета так, чтобы начальные фазы обоих
колебаний были равны нулю:
![]()
Складывая
эти выражения и учитывая, что во втором
сомножителе Δω/2<<ω, получим
![]()
(3)
Результирующее колебание (3) можно
считать как гармоническое с частотой
ω , амплитуда Аσ
которого изменяется по следующему
периодическому закону:
![]()
(4)
Частота изменения Аσ
в два раза больше частоты изменения
косинуса (так как берется по модулю), т.
е. частота биений равна разности частот
складываемых колебаний:
![]()
Период
биений
![]()
Вид
зависимости (3) показан на рис. 2, где
сплошные жирные линии представляют
график результирующего колебания (3), а
огибающие их линии – график медленно
меняющейся согласно уравнению (4)
амплитуды.

Рис.2
Нахождение
частоты тона (звука определенной высоты)
биений между эталонным и измеряемым
колебаниями — наиболее часто используемый
на практике метод сравнения измеряемой
величины с эталонной. Метод биений
применяется для настройки музыкальных
инструментов, анализа слуха и т. д.
При
исследовании сложного колебательного
процесса нужно знать, что любые сложные
периодические колебания s=f(t) можно
представить в виде суперпозиции
(наложения) одновременно совершающихся
гармонических колебаний с различными
амплитудами, начальными фазами, а также
частотами, которые кратны циклической
частоте ω0
:
![]()
![]()
(5)
Представление в виде (5) любой
периодической функции связывают с
понятием гармонического
анализа сложного периодического
колебания,
или разложения
Фурье.
Слагаемые ряда Фурье, которые определяют
гармонические колебания с частотами
ω0,
2ω0,
3ω0,
…, называются первой
(или основной),
второй,
третьей
и т. д. гармониками
сложного периодического колебания.
23 Колебания физического
маятника.
Физический маятник
— осциллятор,
представляющий собой твёрдое
тело, совершающее колебания
в поле
каких-либо сил
относительно точки, не являющейся
центром
масс этого тела, или неподвижной
оси, перпендикулярной направлению
действия сил и не проходящей через центр
масс этого тела.
Определения
-

—
угол отклонения маятника от равновесия; -

—
начальный угол отклонения маятника; -

—
масса маятника; -

—
расстояние от точки подвеса до центра
тяжести маятника; -

—
радиус инерции относительно оси,
проходящей через центр тяжести. -

—
ускорение свободного падения.
Момент
инерции относительно оси,
проходящей через точку подвеса:
![]()
.
[Править] Дифференциальное уравнение движения физического маятника
Основная
статья: Приведённая
длина
Пренебрегая
сопротивлением среды, дифференциальное
уравнение колебаний физического маятника
в поле силы тяжести записывается
следующим образом:
![]()
.
Полагая
![]()
,
предыдущее уравнение можно переписать
в виде:
![]()
.
Последнее
уравнение аналогично уравнению колебаний
математического
маятника длиной
![]()
.
Величина
называется
приведённой
длиной физического маятника.
[Править] Центр качания физического маятника
Центр
качания — точка, в которой надо
сосредоточить всю массу физического
маятника, чтобы его период колебаний
не изменился.
Поместим
на луче,
проходящем от точки подвеса через центр
тяжести точку на расстоянии
от
точки подвеса. Эта точка и будет центром
качания маятника.
Действительно,
если всю массу сосредоточить в центре
качания, то центр качания будет совпадать
с центром масс. Тогда момент инерции
относительно оси подвеса будет равен
![]()
,
а момент
силы тяжести относительно той
же оси
![]()
.
Легко заметить, что уравнение движения
не изменится.
[править]
Теорема Гюйгенса
[править]
Формулировка
Если
физический маятник подвесить за центр
качания, то его период колебаний не
изменится, а прежняя точка подвеса
сделается новым центром качания.
[править]
Доказательство
Вычислим
приведенную длину для нового маятника:
![]()
.
Совпадение
приведённых длин для двух случаев и
доказывает утверждение, сделанное в
теореме.
[править]
Период колебаний физического маятника
Для
того, чтобы найти период колебаний
физического маятника, необходимо решить
уравнение качания. Для этого умножим
левую часть этого уравнения на
,
а правую часть на
![]()
.
Тогда:
.
Интегрируя
это уравнение, получаем.
,
где
![]()
произвольная
постоянная. Её можно найти из граничного
условия, что в моменты
![]()
.
Получаем:
![]()
.
Подставляем и преобразовываем получившееся
уравнение:

.
Отделяем
переменные и интегрируем это уравнение:
.
Удобно
сделать замену переменной, полагая
![]()
.
Тогда искомое уравнение принимает вид:

.
Здесь
![]()
—
нормальный
эллиптический интеграл Лежандра 1-го
рода. Для периода колебаний
получаем формулу:

.
Здесь
![]()
—
полный
нормальный эллиптический интеграл
Лежандра 1-го рода.
[Править] Период малых колебаний физического маятника
Если
амплитуда колебаний
мала,
то корень в знаменателе эллиптического
интеграла приближенно равен единице.
Такой интеграл легко берется, и получается
хорошо известная формула малых колебаний:
.
24 Колебания
математического маятника
Математи́ческий
ма́ятник —
осциллятор,
представляющий собой механическую
систему,
состоящую из материальной
точки,
находящейся на невесомой
нерастяжимой
нити или на невесомом стержне
в однородном поле сил тяготения.
Период
малых собственных колебаний
математического маятника длины l
неподвижно подвешенного в однородном
поле тяжести с ускорением
свободного падения
g
равен

и
не зависит[1]
от амплитуды
и массы
маятника.
Плоский
математический маятник со стержнем —
система с одной степенью
свободы.
Если же стержень заменить на растяжимую
нить, то это система с двумя степенями
свободы со связью. Пример школьной
задачи, в которой важен переход от одной
к двум степеням свободы.
При
малых
колебаниях
физический
маятник
колеблется так же, как математический
с приведённой
длиной.
Уравнение
колебаний маятника
Колебания
математического маятника описываются
обыкновенным
дифференциальным уравнением
вида
![]()
где
ω ― положительная константа, определяемая
исключительно из параметров маятника.
Неизвестная функция x(t)
― это угол отклонения маятника в момент
t
от нижнего положения равновесия,
выраженный в радианах;
![]()
,
где L
― длина подвеса, g
― ускорение
свободного падения.
Уравнение малых колебаний маятника
около нижнего положения равновесия
(т. н. гармоническое уравнение) имеет
вид:
![]()
.
[править]
Решения уравнения движения
[править]
Гармонические колебания
Маятник,
совершающий малые колебания, движется
по синусоиде. Поскольку уравнение
движения является обыкновенным ДУ
второго порядка, для определения закона
движения маятника необходимо задать
два начальных условия — координату
и скорость, из которых определяются две
независимых константы:
![]()
где
A —
амплитуда
колебаний маятника, θ0 —
начальная фаза
колебаний, ω — циклическая
частота,
которая определяется из уравнения
движения. Движение, совершаемое маятником,
называется гармоническими
колебаниями
[править]
Нелинейный маятник
Для
маятника, совершающего колебания с
большой амплитудой, закон движения
более сложен:
![]()
где
![]()
—
это синус
Якоби.
Для
![]()
он
является периодической функцией, при
малых
![]()
совпадает
с обычным тригонометрическим синусом.
Параметр
определяется
выражением
![]()
где
![]()
—
энергия маятника в единицах t−2.
Период
колебаний нелинейного маятника
![]()
где
K — эллиптический интеграл первого
рода.
[править]
Движение по сепаратрисе
Движение
маятника по сепаратрисе является
непериодическим. В бесконечно далёкий
момент времени он начинает падать из
крайнего верхнего положения в какую-то
сторону с нулевой скоростью, постепенно
набирает её, и останавливается,
возвратившись в исходное положение.
25 Затухающие колебания.
Зависимость амплитуды от времени.
Затухающие колебания —
колебания, энергия которых уменьшается
с течением времени. Бесконечно длящийся
процесс вида
![]()
в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил сопротивления
среды, наиболее часто выражаемых линейной
зависимостью от скорости колебаний
![]()
или
её квадрата.
Пускай
имеется система, состоящая из пружины
(подчиняющейся закону
Гука), один конец которой жёстко
закреплён, а на другом находится тело
массой m. Колебания совершаются в
среде, где сила сопротивления
пропорциональна скорости с коэффициентом
c (см. вязкое
трение).
Тогда
второй
закон Ньютона для рассматриваемой
системы запишется так:
![]()
где
Fc — сила сопротивления,
Fy — сила упругости
Fc
= − cv, Fy = − kx, то
есть
ma + cv
+ kx = 0
или
в дифференциальной форме
![]()
где
k — коэффициент упругости в законе
Гука, c — коэффициент
сопротивления, устанавливающий
соотношение между скоростью движения
грузика и возникающей при этом силой
сопротивления.
Для
упрощения вводятся следующие обозначения:

Величину
ω называют собственной частотой системы,
ζ — коэффициентом затухания.
Тогда
дифференциальное уравнение принимает
вид
![]()
Сделав
замену x = eλt,
получают характеристическое
уравнение
![]()
Корни
которого вычисляются по следующей
формуле
![]()
Частота колебаний — физическая величина, равная количеству колебаний, совершаемых за единицу времени.
Чтобы найти частоту колебаний надо количество колебаний разделить на время совершения этих колебаний:

Частота – величина, обратная периоду колебаний:

Частота колебаний ν показывает, сколько колебаний совершается за 1 с. Единица частоты – герц (Гц).
Частота колебаний на графике:
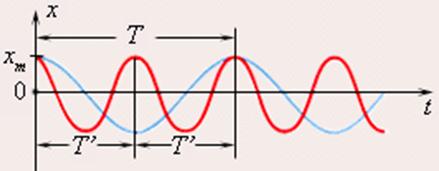
красная кривая отличается от синей только значением частоты (ν’= 2ν)
Разновидности частот колебаний:
Циклическая частота ![]()
Частота колебаний пружинного маятника ![]()
Частота колебаний математического маятника ![]()
Частота электромагнитных колебаний ![]()
Частота колебаний физического маятника ![]()
Частота колебаний крутильного маятника ![]()
Обозначения:
ν — частота колебаний
N – количество колебаний
t – время, за которое совершено N колебаний
ω — циклическая частота
T — период колебаний маятника
m — масса груза, или масса маятника
k — жесткость пружины
L — длина подвеса
g — ускорение свободного падения
J — момент инерции маятника относительно оси вращения
l — расстояние от оси вращения до центра масс
I — момент инерции тела
K — вращательный коэффициент жёсткости маятника
L – индуктивность катушки
С – емкость конденсатора
