Формула частоты колебаний пружинного маятника в физике
Формула частоты колебаний пружинного маятника
Частота колебаний
Определение
Частота колебаний ($nu$) является одним из параметров, которые характеризуют колебания Это величина обратная периоду колебаний ($T$):
[nu =frac{1}{T}left(1right).]
Таким образом, частотой колебаний называют физическую величину, равную числу повторений колебаний за единицу времени.
[nu =frac{N}{Delta t}left(2right),]
где $N$ – число полных колебательных движений; $Delta t$ – время, за которые произошли данные колебания.
Циклическая частота колебаний (${omega }_0$) связана с частотой $nu $ формулой:
[nu =frac{{omega }_0}{2pi }left(3right).]
Единицей измерения частоты в Международной системе единиц (СИ) является герц или обратная секунда:
[left[nu right]=с^{-1}=Гц.]
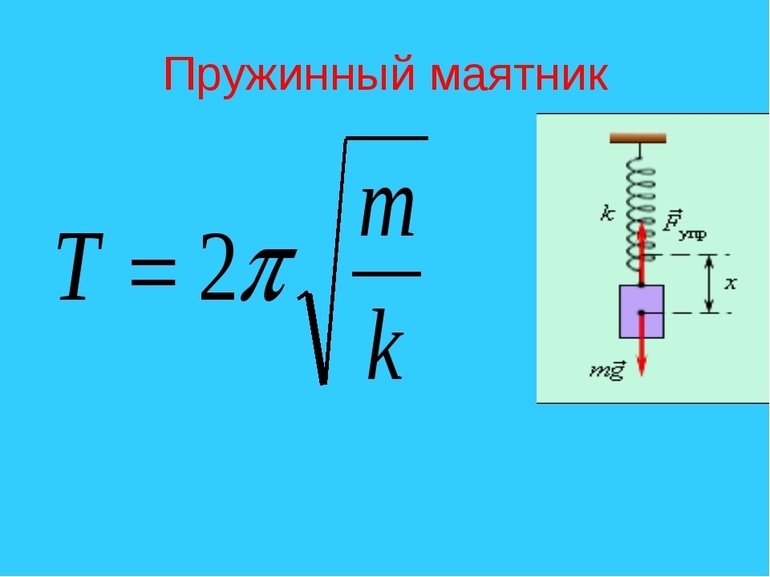
Пружинный маятник
Определение
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
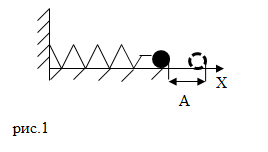
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать горизонтальные движения груза (рис.1), то он движется под действием силы упругости, если систему вывели из состояния равновесия и предоставили самой себе. При этом часто считают, что силы трения можно не учитывать.
Уравнения колебаний пружинного маятника
Пружинный маятник, который совершает свободные колебания – это пример гармонического осциллятора. Пусть он выполняет колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза запишем как:
[ddot{x}+{omega }^2_0x=0left(4right),]
где ${omega }^2_0=frac{k}{m}$ – циклическая частота колебаний пружинного маятника. Решение уравнения (4) это функция синуса или косинуса вида:
[x=A{cos left({omega }_0t+varphi right)=A{sin left({omega }_0t+{varphi }_1right) } }left(5right),]
где ${omega }_0=sqrt{frac{k}{m}}>0$- циклическая частота колебаний пружинного маятника, $A$ – амплитуда колебаний; ${(omega }_0t+varphi )$ – фаза колебаний; $varphi $ и ${varphi }_1$ – начальные фазы колебаний.
Частота колебаний пружинного маятника
Из формулы (3) и ${omega }_0=sqrt{frac{k}{m}}$, следует, что частота колебаний пружинного маятника равна:
[nu =frac{1}{2pi }sqrt{frac{k}{m}} left(6right).]
Формула (6) справедлива в случае, если:
- пружина в маятнике считается невесомой;
- груз, прикрепленный к пружине, является абсолютно твердым телом;
- крутильные колебания отсутствуют.
Выражение (6) показывает, что частота колебаний пружинного маятника увеличивается с уменьшением массы груза и увеличением коэффициента упругости пружины. Частота колебаний пружинного маятника не зависит от амплитуды. Если колебания не являются малыми, сила упругости пружины не подчиняется закону Гука, то появляется зависимость частоты колебаний от амплитуды.
Примеры задач с решением
Пример 1
Задание. Период колебаний пружинного маятника составляет $T=5cdot {10}^{-3}с$. Чему равна частота колебаний в этом случае? Какова циклическая частота колебаний этого груза?
Решение. Частота колебаний – это величина обратная периоду колебаний, следовательно, для решения задачи достаточно воспользоваться формулой:
[nu =frac{1}{T}left(1.1right).]
Вычислим искомую частоту:
[nu =frac{1}{5cdot {10}^{-3}}=200 left(Гцright).]
Циклическая частота связана с частотой $nu $ как:
[{omega }_0=2pi nu left(1.2right).]
Вычислим циклическую частоту:
[{omega }_0=2pi cdot 200approx 1256 left(frac{рад}{с}right).]
Ответ. $1) nu =200$ Гц. 2) ${omega }_0=1256 frac{рад}{с}$
Пример 2
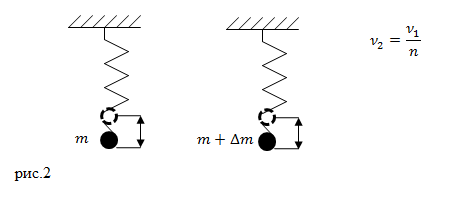
Задание. Массу груза, висящего на упругой пружине (рис.2), увеличивают на величину $Delta m$, при этом частота уменьшается в $n$ раз. Какова масса первого груза?
Решение. Будем считать, что грузы на пружине совершают свободные гармонические колебания, тогда за основу решения задачи примем формулу:
[nu =frac{1}{2pi }sqrt{frac{k}{m}} left(2.1right).]
Для первого груза частота будет равна:
[{nu }_1=frac{1}{2pi }sqrt{frac{k}{m}} left(2.2right).]
Для второго груза:
[{nu }_2=frac{1}{2pi }sqrt{frac{k}{m+Delta m}} left(2.2right).]
По условию задачи ${nu }_2=frac{{nu }_1}{n}$, найдем отношение $frac{{nu }_1}{{nu }_2}:frac{{nu }_1}{{nu }_2}=sqrt{frac{k}{m}cdot frac{m+Delta m}{k}}=sqrt{1+frac{Delta m}{m}}=n left(2.3right).$
Получим из уравнения (2.3) искомую массу груза. Для этого обе части выражения (2.3) возведем в квадрат и выразим $m$:
[1+frac{Delta m}{m}=n^2to frac{Delta m}{m}=n^2-1to m=frac{Delta m}{n^2-1}.]
Ответ. $m=frac{Delta m}{n^2-1}$
Читать дальше: формула частоты.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
При наличии механических колебаний происходит периодическое изменение кинетической и потенциальной энергии. Обращение в ноль кинетической энергии и скорости связано с максимальным отклонением тела от положения равновесия. Энергия такого колеблющегося тела достигает максимального значения. Если груз располагается на горизонтальной пружине, то потенциальная энергия считается энергией упругих деформаций пружины. У математического маятника – это энергия в поле тяготения Земли.
Когда тело принимает положение равновесия при движении, это говорит о наличии минимальной его скорости. Тогда кинетическая энергия обладает максимальным значением, а потенциальная – минимальным. По 3-му закону Ньютона формула силы натяжения записывается как T=mg при вертикальном подвешивании тела на нити. Уменьшение потенциальной приводит к увеличению кинетической. Дальнейшее движение показывает, что происходит уменьшение кинетической и увеличение потенциальной.
Гармонические колебания – это пример превращения кинетической энергии в потенциальную и наоборот.

Рисунок 2.4.1. Модель превращения энергии при колебаниях.
Математический и пружинный маятник
Когда колебательная система не имеет силы трения, тогда остается неизменной полная механическая энергия.
Формулы, характеризующие груз на пружине:
E=Ek+Ep=mυ22+kx22, ω02=km,(Ep)max=kxm22, (Ek)max=mυm22=mω02xm22=(Ep)max.
Выражения при малых колебаниях математического маятника записываются:
E=Ek+Ep=mυ22+mgh=mυ22+mgx22l, ω02=gl,(Ep)max=mghm=mgxm22l, (Ek)max=mυm22=mω02xm22=(Ep)max.
Значение hm является максимальной высотой подъема маятника, xm и υm=ω0xm – максимальными значениями отклонения физического маятника от положения равновесия и его скорости.
Для объяснения превращения энергии при свободных механических колебаниях без силы трения приводится иллюстрация.
Если рассматривать колебания с грузом массой m на пружине с жесткостью k, тогда смещение груза x(t) из положения равновесия и его скорость υ(t) могут изменяться со временем согласно законам:
x(t)=xmcos (ω0t), где ω02=km,
υ(t)=-ωxmsin (ω0t).
Формулы кинетической и потенциальной энергии запишутся так:
Ep(t)=12kx2=12kxm2 cos2ω0t=14kxm2(1+cos 2ω0t),
Ek(t)=12mυ2=12kω02xm2 sin2ω0t=14kxm2(1-cos 2ω0t).
Рисунок 2.4.2 показывает два графика функций изменения Ep(t) и Ek(t). Обе энергии в период колебаний T=2πω0, достигают максимальных значений по два раза. Значение их суммы не изменяется Ep(t)+Ek(t)=E=const.

Рисунок 2.4.2. Превращения энергии при свободных колебаниях.
Реальные условия для колебательной системы – это наличие воздействия сил трения (сопротивления).
При переходе части механической энергии во внутреннюю энергию теплового движения атомов и молекул колебания становятся затухающими, как показано на рисунке 2.4.3.

Рисунок 2.4.3. Свободные затухающие механические колебания.
Скорость затухания колебаний зависит от величины сил трения.
Частота. Добротность. Формулы
Промежуток времени τ с уменьшением колебаний в e≈2,7 раз называют временем затухания.
Скорость затухания зависит от частоты свободных колебаний, как видно из формулы. При увеличении действия сил трения происходит уменьшение собственной частоты. Если действия силы трения достаточно велико, то изменение частоты становятся заметными.
Колебательная система с затухающими колебаниями характеризуется добротностью Q.
Определение параметра представляет собой произведение числа полных колебаний N за время затухания τ на значение π:
Q=πN=πτT.
Повышение Q колебательной системы происходит при медленных затуханиях свободных колебаний. На рисунке 2.4.3 показано, что Q имеет значение, приближенное к 15.
Добротность механических колебательных систем может достигать огромных значений. Для определения Q колебательной системы применяют формулу:
Q=2πЗапас энергии в колебательной системеПотеря энергии за 1 период колебаний.
То есть добротность способна характеризовать относительную убыль (затухание) энергии при наличии действия силы трения на данном промежутке времени, равняющемуся одному периоду колебаний.
Видеоурок: Маятник – Физика в опытах и экспериментах
Лекция: Период и частота колебаний
Маятник – это физическое тело, совершающее колебания под действием сил тяжести или упругости.
Рассмотрим два вида маятников: математический и пружинный.
 Математический маятник
Математический маятник
Идеальной системой колебаний является математический маятник. Данная модель состоит из упругой длинной нити с большой жесткостью и небольшого тела на её конце. Если отклонить такой маятник от состояния равновесия всего на 5 градусов или менее, то он будет совершать гармонические колебания.
Гармонические колебания данного тела совершаются благодаря силе натяжения нити и силе тяжести.

Для вывода формул периода математического маятника, следует воспользоваться Вторым законом Ньютона и основными уравнениями механики. В результате этого получим, что период и циклическая частота математического маятника равны:

Отсюда можно сделать вывод, что ни масса тела маятника, ни выбранная амплитуда не влияют на период и частоту колебаний. Они зависят только от длины нити и ускорения свободного падения в данной местности.
Математический маятник используют для регулирования часов в определенной местности в любой точке земного шара, поскольку, мы уже знаем, что ускорение свободного падения на разных частях поверхностей Земли отличается.
Математический маятник также используют для определения местонахождения залежей металлической руды, поскольку в данных местностях ускорение свободного падения увеличивает свое значение.
Пружинный маятник
Пружинный маятник – это тело, прикрепленное к пружине, которое колеблется под действием силы упругости и силы тяжести.
Произведя аналогичные математические выкладки, получим период и циклическую частоту пружинного маятника: Характеристики гармонических колебаний пружинного маятника зависят от массы груза и жесткости пружины.
Характеристики гармонических колебаний пружинного маятника зависят от массы груза и жесткости пружины.
Примеры движения
Колебательное движение является одним из наиболее распространенных в природе. Например, можно представить себе струны музыкальных инструментов, качели или голосовые связки человека.
В физике колебаниями называются процессы, которые повторяются через равные промежутки времени. Подобные движения рассматривается посредством нескольких моделей:
- тела, подвешенного на пружине (двигающееся по направлению вверх-вниз);
- груза на нитке;
- электрического контура и других.
Амплитуда, период и частота
Если подвесить одновременно два груза на две разные нити и запустить их, то можно заметить, что расстояние отклонения груза от среднего положения до крайнего — разное.
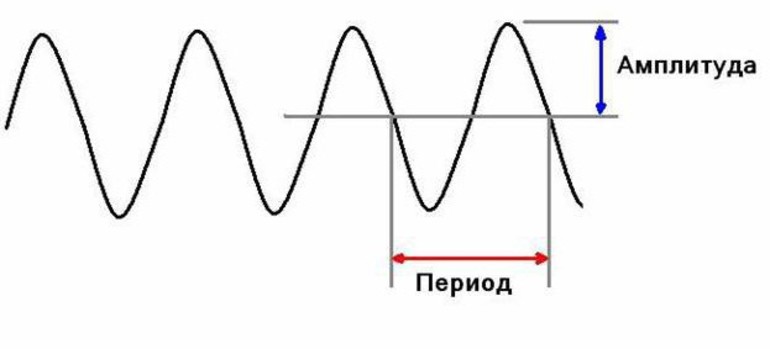
Это величина носит название амплитуды. Обозначается буквой А и измеряется в системе Си в метрах. Также для обозначения подобного движения применяются следующие термины:
- Время, за которое маятник приходит в одно и то же положение, называется периодом колебаний.
- Количество колебаний в единицу времени представляет собой частоту. Она измеряется в Герцах (Гц). Имеет обратную зависимость от периода.
- Циклическая частота колебаний (угловая, круговая) представляет собой количество колебаний за 2 π секунд. Обозначается греческой буквой омега. Она вводится для упрощения расчетов в теоретической физике и электронике. Единица измерения циклической частоты рад/с.
- Если имеется два графика функций с одинаковой частотой, но сдвинуты относительно друг друга, то различна их фаза колебаний.
Выделяют понятие свободных колебаний. Когда системе, например, математическому маятнику, придают импульс, чтобы начать движение, дальнейшие его колебания (самостоятельные) будут считаться свободными.
Математический маятник
Эта модель рассматривает движение груза, подвешенного на нитке. Описывается система, в которой масса нитки намного меньше массы груза, а ее длина намного больше его размеров.
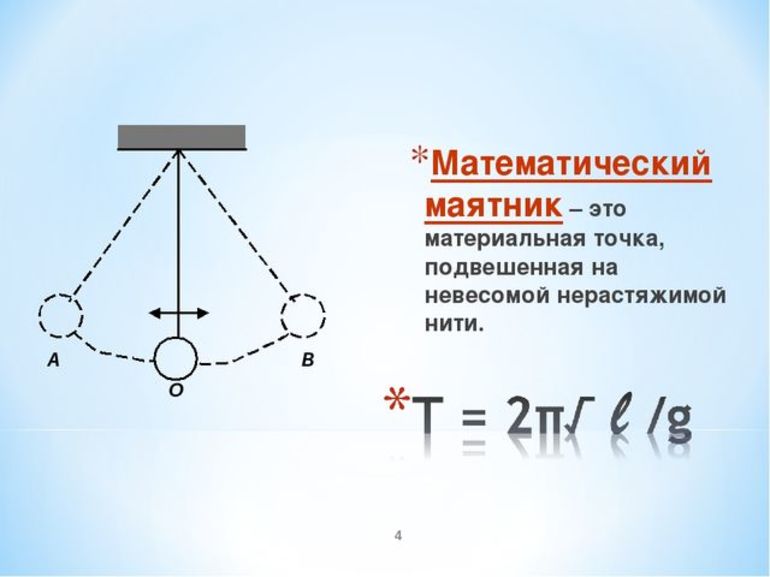
Также нить должна быть невесомой и нерастяжимой.
Груз в этом случае считается материальной точкой.
При выполнении этих условий частота колебаний маятника и период не будут зависеть от массы груза. Движение математического маятника рассматривается при небольшом угле отклонения (α). Последний измеряется в радианах, поэтому приблизительно соответствует по значению его синусу и тангенсу. Этот же угол пропорционален отношению смещения на длину нити:
α=x/l.
На маятник действует синусовая составляющая силы тяжести и тангенсовая сила натяжения нити. Согласно второму закону Ньютона: ma=-mgsin (α). Откуда можно получить a=-gx/l
Вторая производная уравнения движения дает a=-(ω)^2x
Таким образом: -gx/l=-(ω)^2x -> ω ^2=g/l.
Период: T=2π /ω T=2π*sqrt (g/l)
Это формула Галилея, которая описывает движение математического маятника.
Формула частоты колебаний для математического маятника: v=sqrt (l/g)/2π.
Пружинный маятник
Подобным термином называется система, в которой движения совершает груз, подвешенный на легкой пружине.

Тело находится в положении равновесия, если пружина не деформирована. Если ее растянуть или сжать, то система начнет колебания под действием силы упругости, которая направлена на приведение маятника в положение равновесия.
Сила упругости пропорциональна смещению тела (x), но направлена противоположно. Коэффициент пропорциональности между этими двумя величинами носит название жесткости пружины (k). Таким образом:
F=-kx.
Сила упругости достигает наибольшей величины в положении максимального отклонения тела (амплитуда, смещение) от равновесия. В этой точке наибольшую величину имеет и ускорение.
По мере того, как тело приближается к положению равновесия, уменьшается сила упругости и ускорение. В средней точки обе величины равны нулю, но ненулевое значение имеет скорость тела. Поэтому груз не останавливается, а продолжает движение.
После прохождения положения равновесия он двигается в обратном направлении по инерции, а сила упругости тянет его назад. Благодаря трению воздуха скорость уменьшается, и маятник останавливается.
Все эти модели можно отнести к классическому гармоническому осциллятору — системе, которая имеет одну степень свободы и описывается единственным уравнением.
Явление резонанса
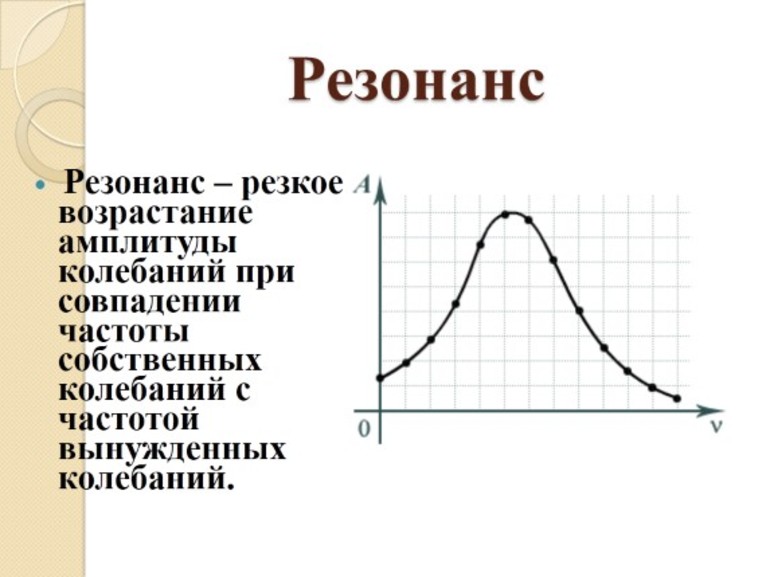
Это понятие имеет особое значение для описания колебаний. Если имеется некое воздействие, частота которого приближается к собственной частоте системы, то последняя реагирует резким увеличением амплитуды.
Явление резонанса можно представить себе на примере того же математического маятника. Для этого необходимо маятник привязать к веревке, к которой привязать еще один такой же, но с более длинной нитью. При этом длина нитки второго маятника может регулироваться. Если привести в движение оба маятника, а длину второй нитки постепенно изменять, то можно будет заметить, что амплитуда увеличивается по мере приближения размеров обеих ниток.
В этом случае первый маятник будет приемником колебаний, а второй — передатчиком. Причиной увеличения амплитуды является колебание подвески с такой же частотой.
Колебательный контур
Является еще одним примером колебаний, на котором основаны все радиоприемники. Контур играет роль приемника сигнала.
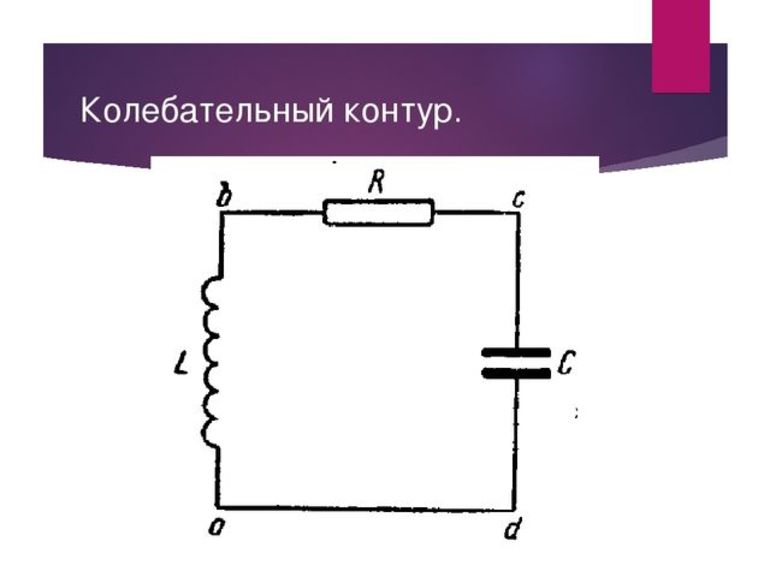
В простейшем примере представляет собой замкнутую цепь из катушки индуктивности и конденсатора. При определенных обстоятельствах в подобном контуре могут возникать и поддерживаться электрические колебания.
Для возбуждения колебаний необходимо подключить источник постоянного напряжения к конденсатору и зарядить его. После этого источник убрать, а цепь замкнуть.
Конденсатор разряжается через катушку индуктивности, а в цепи создается ток, интенсивность которого увеличивается по мере разряда конденсатора. Вокруг катушки создается магнитное поле.
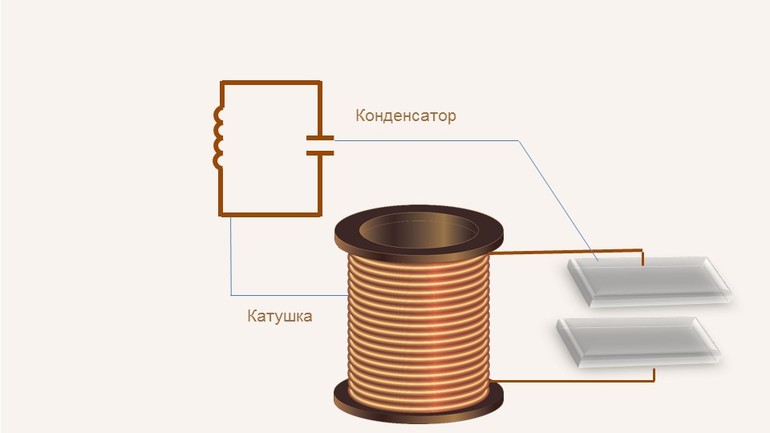
Электрический заряд конденсатора преобразовался в магнитное поле. После этого магнитное поле катушки будет уменьшаться, а конденсатор обратно заряжаться. Процесс повторяется циклически и описывается теми же характеристиками, что и механические колебания: частотой, амплитудой и периодом.
Они являются свободными и затухающими. Чтобы их поддерживать, необходимо периодически заряжать конденсатор.
Звук и электромагнитные волны
Понятие частоты вводится и для звуковых и электромагнитных волн. Первые представляют собой колебания плотности среды. Вторые — изменение со временем напряженности магнитного и электрического полей.
От частоты звука зависит его тональность. Этим свойством пользуются для стандартизации описания музыки и создания музыкальных инструментов — каждой ноте соответствует своя частота.
До 16 Гц человеческое ухо не воспринимает, так же как и выше 20 КГЦ. Более высокие частоты используются в эхолокации, ультразвуковой диагностике.

Частота электромагнитных волн также определяет их способность взаимодействовать с человеческим организмом. Рентгеновское излучение проходит насквозь, при этом взаимодействуя с молекулами, вызывая их ионизацию. Ультразвук провоцирует процессы загара, фотосинтеза. Радиоволновое излучение практически не оказывает прямого воздействия, но хорошо подходит для передачи информации. В видимом диапазоне частота определяет цвет.
Есть также такая характеристика, как частота колебаний молекул. Она зависит от температуры тела и определяет его агрегатное состояние.
Таким образом, частота колебаний описывает большое количество процессов и оказывает воздействие на их характеристики.
План урока:
Колебательное движение
Период и частота колебаний
Свободные колебания
Амплитуда колебаний
Колебательные системы
Гармонические колебания
Величины, характеризующие колебательное движение
Затухающие колебания
Вынужденные колебания
Колебательное движение
В самом широком смысле, колебательное движение – это любое движение, повторяющееся с течением времени. Например, птица, машущая крыльями вверх-вниз, совершает ими колебательные движения. Ребенок, качающийся на качелях, тоже совершает колебательные движения. Игла швейной машины при шитье – тоже.
Но как же так, ведь в названных примерах тела движутся абсолютно по-разному? Крылья птицы и игла швейной машины движутся вертикально вверх-вниз (прямолинейно), ребенок на качелях движется горизонтально и по дуге (криволинейно). Это все неважно. Главный признак колебательного движения – его повторяемость через определенный промежуток времени, то есть через период колебаний.
Период и частота колебаний
Период колебаний (T) – это время, за которое тело совершает полный цикл движения, т.е. совершает одно колебание.
В случае с движением крыльев птицы, если считать, что один взмах начинается с верхней точки, полным колебанием будет считаться, когда крылья пройдут от верхней точки через середину до нижней и вернутся от нижней точки через середину до верхней (рисунок 1).

Рисунок 1 – Взмах крыльев птицы как пример полного колебания
Период колебаний обозначается латинской буквой T. По определению период – это время, значит, единица измерения периода будет такой же, как и единица измерения времени. В СИ это секунда.
[T] = 1 с
Как же можно вычислить период колебаний?
Самый простой способ – это посчитать количество колебаний и секундомером измерить время, за которое эти колебания были совершены. Например, ребенок на качелях совершает N = 10 колебаний за t = 30 секунд. Нетрудно подсчитать, что время совершения одного полного колебания будет 30/10 = 3 с. Если обобщить, получится формула для нахождения периода колебаний:

где t – время, за которое совершено N колебаний.
Рассмотрим еще одну важную характеристику.
Частота колебаний (ν) – это количество колебаний, совершаемое телом за единицу времени.
Частота колебаний обозначается греческой буквой (читается как «ню»).
Если сравнить определение частоты колебаний с определением периода, можно заметить, что это обратные величины. То есть:

Гц – единица измерения, которую назвали в честь немецкого физика Генриха Герца. При решении задач одинаково часто употребляется и герц, и с-1. Можно употреблять и то, и другое – в зависимости от того, что удобнее при решении конкретной задачи.
Следует так же отметить, что иногда физики пользуются циклической частотой колебаний:

Свободные колебания
Положение равновесия при колебательном движении
Сравним две ситуации:
1. Родитель толкает качели, на которых сидит ребенок, а потом просто наблюдает, как качели качаются сами по себе.
2. Родитель толкает качели с ребенком, а потом при каждом цикле движения подталкивает качели, поддерживая качания.
Физики говорят, что в первом случае система (качели и ребенок) совершает свободные колебания, то есть колебания под действием только внутренних сил. После выведения системы из равновесия (то есть толчка родителя) к ней больше не прикладывают внешних сил. Во втором случае говорят, что система совершает вынужденные колебания – то есть колебания, под действием периодического внешнего воздействия.
Поговорим о свободных колебаниях. Для простоты рассмотрим систему, состоящую из маленького тяжелого шарика на длинной крепкой нити. Такая система называется нитяным маятником (рисунок 2).

Рис.2 – Нитяной маятник
Без воздействия внешних сил шарик будет находиться в положении 1. Такое состояние называется положением равновесия. Далее к шарику прикладывают силу, направленную влево и он начинает совершать колебания. Траектория шарика будет: 1-2-1-3-1 (см. рисунок 1).
Как при этом будет меняться скорость тела? Для того, чтобы рассмотреть подробно, нужно помнить определения потенциальной и кинетической энергии*, а также в чем заключается закон сохранения энергии (систему считаем замкнутой – потерь энергии не происходит, а, значит, закон сохранения энергии выполняется – энергия колебательной системы остается постоянной):
- при движении из точки 1 в 2 шарик постепенно замедляется (уменьшается его кинетическая энергия, а потенциальная увеличивается);
- в точке 2 он на мгновенье останавливается (кинетическая энергия равна нулю, потенциальная максимальна);
- далее он начинает движение с ускорением, но уже в обратном направлении (кинетическая энергия увеличивается, потенциальная уменьшается) – при движении из 2 в 1 тело будет ускоряться;
- когда шарик дойдет до точки 1 его кинетическая энергия будет максимальна, а потенциальная минимальна.
При движении от точки 1 в 3 будет происходить то же самое, что и при движении из 1 в 2 – предлагаем описать процесс изменения величин (скорости и энергии) самостоятельно.
Если обобщить все сказанное, можно сделать вывод: при колебаниях в положении равновесия кинетическая энергия тела максимальна, а потенциальная минимальна (или равна нулю, в зависимости от выбранной точки отсчета). В крайних положениях потенциальная энергия максимальна, а кинетическая равна нулю. То есть положение равновесия маятника – это такое положение, в котором его потенциальная энергия минимальна (или равна нулю, в зависимости от точки отсчета). При удалении маятника от положения равновесия кинетическая энергия будет уменьшаться, а потенциальная увеличиваться.
*Потенциальная энергия тела зависит от его положения в пространстве; кроме того, это относительная величина – она зависит от того, какая точка отсчета выбрана.
Кинетическая энергия зависит от модуля скорости тела.
Амплитуда колебаний
Помимо частоты и периода важной характеристикой колебаний является амплитуда.
Амплитуда колебаний – это модуль максимального смещения тела от положения равновесия. Другими словами, это расстояние между положением равновесия и крайней точкой траектории маятника. Рассмотрим рисунок 3. На нем изображен уже знакомый вам нитяной маятник. В идеальном случае амплитуду колебаний маятника нужно считать как длину дуги от положения равновесия до крайней точки. Но если мы считаем, что колебания малые – то есть длина нити маятника (l) гораздо больше смещения (S), можно считать, что длина дуги совпадает с длиной отрезка между проекциями положения равновесия и крайней точки на ось ОХ.

Рис.3 – Амплитуда колебаний нитяного маятника
Обычно амплитуда обозначается большой латинской буквой A.
Колебательные системы
Для того, чтобы рассмотреть колебательные движения подробнее, рассмотрим несколько колебательных систем, на примере которых будет рассматривать все закономерности.
1. Маятник
В общем случае маятник – это система, способная совершать колебания под действием каких-либо сил, например, сил трения, упругости, тяжести.
2. Пружинный маятник
Пружинный маятник – это система, состоящая из упругой пружины, один конец которой закреплен, а на другой прикреплен груз.
Такой маятник может быть вертикальным (рисунок 4а), тогда колебания будут совершаться под действием сил тяжести и упругости; и горизонтальным (рисунок 4б), тогда на груз будут действовать сил упругости и трения.

Рис.4 – Пружинный маятник
Для пружинного маятника справедливы формулы:

где T –период колебаний пружинного маятника; π ~ 3.14; m–масса груза;k–коэффициент жесткости пружины; – частота колебаний пружинного маятника.
*Ранее говорилось, что существует такая характеристика, как циклическая частота. Формула для ее нахождения будет выглядеть так:

3. Нитяной маятник
Этот вид маятника уже рассматривался ранее (см. рисунок 3), он состоит из длинной нити и тяжелого грузика, подвешенного на ней.
Для нитяного маятника справедливы формулы:

где T – период колебаний нитяного маятника; π ~ 3.14; l –длина нити; g – ускорение свободного падения (~9,8 м/с2), v – частота колебаний.
Интересно отметить, что период нитяного маятника и, следовательно, его частота не зависят от массы грузика, прикрепленного к нити.
*Следует отметить, что все приведенные формулы справедливы только для малых колебаний.
** Циклическая частота нитяного маятника:

Гармонические колебания
При решении задач часто используется не нитяной маятник, а его упрощенная модель – математический маятник. Это идеальная колебательная система, в которой нить считается очень длинной по сравнению с амплитудой колебаний и размерами грузика; сам груз достаточно тяжелым, чтобы пренебречь массой нити. Кроме того, считается, что не происходит потерь энергии.
Рассмотрим подробно, какие силы действуют на такую систему. В первую очередь, на грузик действует сила тяжести mg, направленная вниз (см. рисунок 5). Так же на него действует сила натяжения со стороны нити F, она направлена вдоль нити. Обозначим угол, на который смещается тело от положения равновесия.

Рис.5 – Силы, действующие на математический маятник
Запишем 2-й закон Ньютона:


Рисунок 6 – Силы, действующие на математический маятник при смещении на угол φ
В случае малых углов sinφ можно считать равным φ. Из геометрического определения синуса:

Тогда в крайней точке 2-й закон Ньютона в проекции на ось OX перепишется следующим образом:

То есть ускорение, с которым движется маятник прямо пропорционально его смещению от положения равновесия. Минус в данном выражении означает, что ускорении направлено в противоположную сторону от смещения.
Интересно заметить, что ускорение грузика, подвешенного к ниточке (а значит и самого маятника), не зависит от его массы. Период колебаний математического маятника тоже не зависит от массы грузика:

В случаях, когда колебания происходят под действием силы, пропорциональной смещению тела от положения равновесия, говорят, что тело совершает гармонические колебания.*
График зависимости смещения от времени при гармоническом колебательном движении представляет собой синусоиду или косинусоиду (см. рисунок 7).
Для лучшего понимания, почему график выглядит именно так, можно посмотреть урок в курсе алгебры «Тригонометрические функции»:

Рис. 7 – График зависимости смещения (x) от времени (t) при гармонических колебаниях
На графическом представлении колебаний (рисунок 7) удобно находить период и амплитуду гармонических колебаний.
*Могло сложиться впечатление, что гармонические колебания может совершать только математический маятник. Это не так. Любое тело может совершать колебания, близкие к гармоническим (нужно учитывать не идеальность систем). Например, можно говорить о гармонических колебаниях пружины, если она достаточно жесткая, чтобы она деформировалась упруго, а колебания совершаются с небольшой амплитудой.
Величины, характеризующие колебательное движение
Ранее рассматривались такие характеристики колебаний, как период, частота и амплитуда. Помимо этих величин, колебания характеризуются фазой колебаний.
Фаза колебаний
На рисунке 7 изображен график зависимости смещения от времени при гармонических колебаниях. Такой график называется синусоидой (косинусоидой). В общем случае уравнение зависимости координаты Х от времени t будет выглядеть так:

Разность фаз
Понятие «разность фаз» применяется, когда мы хотим сравнить движение двух маятников. Пусть маятник 1 и маятник 2 двигаются по законам соответственно:

Найдем разность фаз колебаний этих двух маятников.
Если взять конкретный момент времени , фаза гармонических колебаний каждого из маятников в этот момент времени будет:

 – это начальные фазы колебания первого и второго маятников соответственно. Эти величины являются начальными условиями, и они не изменяются во время движения, следовательно, при одинаковой частоте колебаний маятников разность фаз остается постоянной.
– это начальные фазы колебания первого и второго маятников соответственно. Эти величины являются начальными условиями, и они не изменяются во время движения, следовательно, при одинаковой частоте колебаний маятников разность фаз остается постоянной.
Затухающие колебания
Во всех рассмотренных ранее случаях считалось, что на колеблющуюся систему не действуют силы извне. На самом деле, идеальных систем не существует, поэтому любой маятник во время движения будет преодолевать внешние силы сопротивления и терять энергию. Например, пружинный маятник (рисунок 8) будет преодолевать силу трению о поверхность.

Рисунок 8 – Пружинный маятник на шероховатой поверхности
Колебания, энергия которых уменьшается с течением времени, называются затухающими.
Амплитуда затухающих колебаний уменьшается со временем. График таких колебаний изображен на рисунке 9.

Рисунок 9 – График зависимости координаты от времени при затухающих колебаниях
Вынужденные колебания
Собственная частота колебаний. Частота вынуждающей силы. Установившиеся вынужденные колебания
В реальных (неидеальных) системах колебания всегда нужно поддерживать внешним воздействием.
Под действием периодической внешней изменяющейся силы возникают вынужденные колебания.
Почему же обязательно сила должны быть периодически изменяющейся? Ответ на этот вопрос легко найти, представив себе качели. Если на них действовать с постоянной по модулю и направлению силой, они никогда не начнут качаться. А толчками (то есть периодической изменяющейся силой) раскачать их не составит труда.
Внешняя сила, заставляющая систему совершать колебания, называется вынуждающей силой.
Так как эта сила периодическая, необходимо ввести частоту вынуждающей силы. А чтобы не запутаться, частоту свободных колебаний называют собственной частотой системы. Как показывают эксперименты, даже если изначально собственная частота системы и частота вынуждающей силы отличались, через некоторое время система начинает колебаться с частотой вынуждающей силы. В таких случаях говорят об установившихся вынужденных колебаниях.
Если частота вынуждающей силы равна собственной частоте системы, возникает резонанс – резкое увеличение амплитуды колебаний.
