Формулы математического маятника в физике
Формулы математического маятника
Определение и формулы математического маятника
Определение
Математический маятник – это колебательная система, являющаяся частным случаем физического маятника, вся масса которого
сосредоточена в одной точке, центре масс маятника.
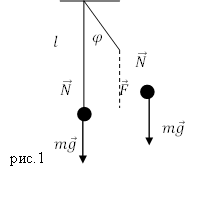
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник – классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
[ddot{varphi }+{omega }^2_0varphi =0 left(1right),]
где $varphi $ – угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
[varphi (t)={varphi }_0{cos left({omega }_0t+alpha right)left(2right), }]
где $alpha $ – начальная фаза колебаний; ${varphi }_0$ – амплитуда колебаний; ${omega }_0$ – циклическая частота.
Колебания гармонического осциллятора – это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
[ {omega }_0=sqrt{frac{g}{l}}left(3right).]
Период колебаний математического маятника ($T$) в этом случае равен:
[T=frac{2pi }{{omega }_0}=2pi sqrt{frac{l}{g}}left(4right).]
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
[E=E_k+E_p=frac{mv^2}{2}+mgh=frac{mv^2}{2}+frac{mgx^2}{2l}=constleft(5right),]
где $E_k$ – кинетическая энергия маятника; $E_p$ – потенциальная энергия маятника; $v$ – скорость движения маятника; $x$ – линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол – смещение связан с $x$ как:
[varphi =frac{x}{l}left(6right).]
Максимальное значение потенциальной энергии математического маятника равно:
[E_{pmax}=mgh_m=frac{mg{x^2}_m}{2l}left(7right);;]
Максимальная величина кинетической энергии:
[E_{kmax}=frac{mv^2_m}{2}=frac{m{omega }^2_0{x^2}_m}{2l}=E_{pmax}left(8right),]
где $h_m$ – максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m={omega }_0x_m$ – максимальная скорость.
Примеры задач с решением
Пример 1
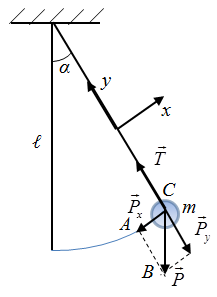
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
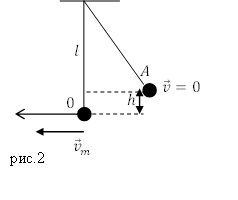
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
[frac{mv^2}{2}=mgh left(1.1right).]
Из уравнения (1.1) найдем искомую высоту:
[h=frac{v^2}{2g}.]
Ответ. $h=frac{v^2}{2g}$
Пример 2
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit{}
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
[T=2pi sqrt{frac{l}{g}}left(2.1right).]
Выразим из нее ускорение:
[g=frac{4{pi }^2l}{T^2} .]
Проведем вычисления ускорения силы тяжести:
[g=frac{4{pi }^2cdot 1}{2^2}={pi }^2approx 9,87 left(frac{м}{с^2}right).]
Ответ. $g=9,87 frac{м}{с^2}$
Читать дальше: формулы пружинного маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 9 февраля 2023 года; проверки требует 1 правка.

Математический маятник. Чёрный пунктир — положение равновесия,  — угол отклонения от вертикали в некоторый момент
— угол отклонения от вертикали в некоторый момент
Математи́ческий ма́ятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки на конце невесомой нерастяжимой нити или лёгкого стержня и находящуюся в однородном поле сил тяготения[1]. Другой конец нити (стержня) обычно неподвижен. Период малых собственных колебаний маятника длины L, подвешенного в поле тяжести, равен

и не зависит, в первом приближении, от амплитуды колебаний и массы маятника. Здесь g — ускорение свободного падения.
Математический маятник служит простейшей моделью физического тела, совершающего колебания: она не учитывает распределение массы. Однако реальный физический маятник при малых амплитудах колеблется так же, как математический с приведённой длиной.
Характер движения маятника[править | править код]
Математический маятник со стержнем способен колебаться только в какой-то одной плоскости (вдоль какого-то выделенного горизонтального направления) и, следовательно, является системой с одной степенью свободы. Если же стержень заменить на нерастяжимую нить, получится система с двумя степенями свободы (так как становятся возможными колебания по двум горизонтальным координатам).
При колебаниях в одной плоскости маятник движется по дуге окружности радиуса  , а при наличии двух степеней свободы может описывать кривые на сфере того же радиуса[1]. Нередко, в том числе в случае нити, ограничиваются анализом плоского движения; оно и рассматривается далее.
, а при наличии двух степеней свободы может описывать кривые на сфере того же радиуса[1]. Нередко, в том числе в случае нити, ограничиваются анализом плоского движения; оно и рассматривается далее.
Уравнение колебаний маятника[править | править код]

Маятник (схема с обозначениями)
Если в записи второго закона Ньютона  для математического маятника выделить тангенциальную составляющую (
для математического маятника выделить тангенциальную составляющую ( , получится выражение
, получится выражение
 ,
,

так как  , а из действующих на точку сил тяжести и натяжения ненулевую компоненту
, а из действующих на точку сил тяжести и натяжения ненулевую компоненту  даёт только первая. Следовательно, колебания маятника описываются обыкновенным дифференциальным уравнением (ДУ) вида
даёт только первая. Следовательно, колебания маятника описываются обыкновенным дифференциальным уравнением (ДУ) вида
- ,

где неизвестная функция  ― это угол отклонения маятника в момент
― это угол отклонения маятника в момент  от нижнего положения равновесия, выраженный в радианах, ― длина подвеса,
от нижнего положения равновесия, выраженный в радианах, ― длина подвеса,  ― ускорение свободного падения. Предполагается, что потерь энергии в системе нет. В области малых углов
― ускорение свободного падения. Предполагается, что потерь энергии в системе нет. В области малых углов  это уравнение превращается в
это уравнение превращается в
- .

Для решения ДУ второго порядка, то есть для определения закона движения маятника, необходимо задать два начальных условия — угол и его производную  при
при  .
.
Решения уравнения движения[править | править код]
Возможные типы решений[править | править код]
В общем случае решение ДУ с начальными условиями для маятника может быть получено численно. Варианты движения (в случае, если маятник — это материальная точка на лёгком стержне), качественно, представлены на анимации. В каждом окне вверху показана зависимость угловой скорости от угла . По мере нарастания размаха поведение маятника всё сильнее отклоняется от режима гармонических колебаний.
-

Маятник висит
-
Малые колебания (размах 45°)
-
Колебания с размахом 90°
-
Колебания с размахом 135°
-
Колебания с размахом 170°
-
Фиксация в верхнем положении
-
Движение близкое к сепаратрисе
-
Вращение маятника






Гармонические колебания[править | править код]
Уравнение малых колебаний маятника около нижнего положения равновесия, когда уместна замена , называется гармоническим уравнением:
- ,

где  ― положительная константа, определяемая только из параметров маятника и имеющая смысл собственной частоты колебаний. Кроме того, может быть осуществлён переход к переменной «горизонтальная координата»
― положительная константа, определяемая только из параметров маятника и имеющая смысл собственной частоты колебаний. Кроме того, может быть осуществлён переход к переменной «горизонтальная координата»  (ось
(ось  лежит в плоскости качания и ортогональна нити в нижней точке):
лежит в плоскости качания и ортогональна нити в нижней точке):
- .

Малые колебания маятника являются гармоническими. Это означает, что смещение маятника от положения равновесия изменяется во времени по синусоидальному закону[2]:
- ,

где  — амплитуда колебаний маятника,
— амплитуда колебаний маятника,  — начальная фаза колебаний.
— начальная фаза колебаний.
Если пользоваться переменной , то при необходимо задать координату  и скорость
и скорость  , что позволит найти две независимые константы , из соотношений
, что позволит найти две независимые константы , из соотношений  и
и  .
.
Случай нелинейных колебаний[править | править код]
Для маятника, совершающего колебания с большой амплитудой, закон движения более сложен:

где  — это синус Якоби. Для
— это синус Якоби. Для  он является периодической функцией, при малых
он является периодической функцией, при малых  совпадает с обычным тригонометрическим синусом.
совпадает с обычным тригонометрическим синусом.
Параметр определяется выражением
- .

Период колебаний нелинейного маятника составляет
- ,

где K — эллиптический интеграл первого рода.
Для вычислений практически удобно разлагать эллиптический интеграл в ряд:
![{displaystyle T=T_{0}left{1+left({frac {1}{2}}right)^{2}sin ^{2}left({frac {theta _{0}}{2}}right)+left({frac {1cdot 3}{2cdot 4}}right)^{2}sin ^{4}left({frac {theta _{0}}{2}}right)+dots +left[{frac {left(2n-1right)!!}{left(2nright)!!}}right]^{2}sin ^{2n}left({frac {theta _{0}}{2}}right)+dots right}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5346cf06ad62d5c061cf5527d53a86e61cf89478)
где  — период малых колебаний,
— период малых колебаний,  — максимальный угол отклонения маятника от вертикали.
— максимальный угол отклонения маятника от вертикали.
При углах до 1 радиана (≈ 60°) с приемлемой точностью (ошибка менее 1 %) можно ограничиться первым приближением:
- .

Точная формула периода, с квадратичной сходимостью для любого угла максимального отклонения, обсуждается на страницах сентябрьского выпуска журнала «Заметки американского математического общества» 2012 года[3]:
- ,

где  — арифметико-геометрическое среднее чисел 1 и
— арифметико-геометрическое среднее чисел 1 и  .
.
Движение по сепаратрисе[править | править код]
Движение маятника по сепаратрисе является непериодическим. В бесконечно далёкий момент времени он начинает падать из крайнего верхнего положения в какую-то сторону с нулевой скоростью, постепенно набирает её, а затем останавливается, возвратившись в исходное положение.
Факты[править | править код]
Несмотря на свою простоту, математический маятник связан с рядом интересных явлений.
- Если амплитуда колебания маятника близка к , то есть движение маятника на фазовой плоскости близко к сепаратрисе, то под действием малой периодической вынуждающей силы система демонстрирует хаотическое поведение. Это одна из простейших механических систем, в которой хаос возникает под действием периодического возмущения[4].
- Если точка подвеса не неподвижна, а совершает колебания, то у маятника может появиться новое положение равновесия. Если точка подвеса достаточно быстро колеблется вверх-вниз, то маятник приобретает устойчивое положение «вверх тормашками». Такая система называется маятником Капицы.
- В условиях вращения Земли при достаточно длинной нити подвеса плоскость, в которой маятник совершает колебания, будет медленно поворачиваться относительно земной поверхности в сторону, противоположную направлению вращения Земли (маятник Фуко).

См. также[править | править код]
- Физический маятник
- Маятник Фуко
- Маятник Дубошинского
Примечания[править | править код]
- ↑ 1 2 Главный редактор А. М. Прохоров. Маятник // Физический энциклопедический словарь. — М.: Советская энциклопедия. — 1983. — Статья в Физическом энциклопедическом словаре
- ↑ Скорость и ускорение маятника при гармонических колебаниях также изменяются во времени по синусоидальному закону.
- ↑ Adlaj S. An Eloquent Formula for the Perimeter of an Ellipse (англ.) // Notices of the AMS. — 2012. — Vol. 59, no. 8. — P. 1096—1097. — ISSN 1088-9477.
- ↑ В. В. Вечеславов. Хаотический слой маятника при низких и средних частотах возмущений // Журнал технической физики. — 2004. — Т. 74, № 5. — С. 1—5. Архивировано 14 февраля 2017 года.
Ссылки[править | править код]
- Коллекция Java-апплетов, моделирующая поведение математических маятников, в частности маятника Капицы.
- Java-апплет, моделирующий колебание математического маятника при наличии вязкого трения с черчением фазовой траектории.
- Учебный фильм «Математический и физический маятник», производство СССР
Частота математического маятника

Виктор Матвеевич Скоков
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Замечание 1
Колебаниям математический маятника – тела с точечной массой, подвешенного на упругой нити – свойственен изохронизм. Это значит, что их частота не зависит от амплитуды и массы подвешенного тела. Такая система обладает свойствами гармонического осциллятора – устройства, график движения тела, в котором представляет собой синусоиду.
Функция, описывающая гармонические колебания:
$varphi (t) = varphi_0 cdot cos(omega_0 + alpha)$, где:
- $ alpha$- начальная фаза колебаний,
- $varphi_0$ – их амплитуда,
- $omega_0$ – циклическая частота.
Циклическая частота связана с длиной подвеса математического маятника зависимостью:
$omega_0 = sqrt{frac{g}{l}}$,
где $g$ – ускорение свободного падения, $l$ – длина нити.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
Эта зависимость получается исходя из того, что при малых отклонениях от вертикали касательную (тангенциальную) составляющую силы, тянущей маятник по дуге, можно найти как сумму векторов силы упругости нити (направлена от тела к центру вращения вдоль нити) и силы тяжести (направлена вертикально вниз). Ускорение, создаваемое касательной силой, относится к ускорению свободного падения в следующем соотношении:
$a = g cdot frac{x}{l}$,
где $l$ – длина нити, $x$ – модуль касательной силы.
Поскольку же уравнение колебательного движения выглядит как
$a = – omega_0^2 cdot x$,
где $omega_0$ – частота циклических колебаний, можно подставить в формулу для нахождения периода колебаний полученное соотношение:
$T = frac{2pi}{omega_0}; omega_0 = sqrt{frac{g}{l}} implies T = 2pi cdot sqrt{frac{l}{g}}$
Частоту можно найти как величину, обратную периоду.
$f = frac{1}{T}$
Пример 1
Найти частоту колебаний маятника с длиной подвеса 1 м.
$T = 2 cdot 3,14 cdot sqrt{frac{1}{9,8}} approx 2 с$.
$f = frac{1}{2} = 0,5$
Ответ: 0,5 колебаний в секунду.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Дата последнего обновления статьи: 22.04.2023
Похожие материалы по теме
Автор(ы):
Алексей Алексеевич Ивахно
Автор(ы):
Алексей . Малеев
Автор(ы):
Андрей Геннадьевич Блохин
Автор(ы):
Сергей Феликсович Савельев
Автор(ы):
Наталья Николаевна Пушкина
Решение любого учебного вопроса за 300₽
-
Математический маятник. Частота колебаний математического маятника (формула).
Математический
маятник –
материальная точка, подвешенная на
невесомой нерастяжимой нити, и совершавшая
колебания в вертикальной плоскости под
действием силы тяжести. Если отклонить
маятник от положения равновесия,
то сила
тяжести и сила
упругости будут
направлены под углом. Равнодействующая
сила уже
не будет равна нулю. Под воздействием
этой силы маятник устремится к положению
равновесия, но по инерции движение
продолжится и маятник отклоняется в
другую сторону. Равнодействующая сила
его снова возвращает.
Частота
математического маятника —
Чем больше период колебаний математического
маятника, тем меньше частота.
![]()

Важно
где происходят колебания! На Луне и на
Земле один и тот же математический
маятник при одинаковых начальных
условиях колебаться будет по-разному.
Так как ускорение
свободного падения на
Луне отличается от ускорения свободного
падения на Земле.
-
Линейная скорость материальной точки, линейное ускорение материальной точки, единицы измерения. Сложение скоростей.
линейная
скорость
– это производная от пройденного пути
по времени.
Отдельные
точки вращающегося тела имеют различные
линейные скорости ![]()
(метр/сек).
Скорость каждой точки, будучи направлена
по касательной к соответствующей
окружности, непрерывно изменяет свое
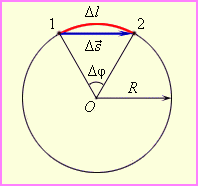
направление. Величина
скорости ![]() определяется
определяется
скоростью вращения тела ![]() и
и
расстоянием R рассматриваемой точки от
оси вращения. Пусть за малый промежуток
времени ![]() тело
тело
повернулось на угол![]()
Точка, находящаяся на расстоянии R от
оси проходит при этом путь, равный :![]()
Линейная
скорость точки по определению:
|
|
линейное
ускорение
– это производная от скорости по времени.
Формула
линейного ускорения:
a
= dv/dt = d2s/dt2,
где s – путь,пройденный телом.
Сложение
скоростей —
с помощью данного закона определяется
скорость движения тела относительно
неподвижной системы отсчёта. Она равна
векторной сумме скорости этого тела
относительно подвижной системы отсчета
и скорости самой подвижной системы
отсчета относительно неподвижной
системы
![]()
Для
того, чтоб было более понятно, как
работает закон сложения скоростей,
рассмотрим такой пример. Вагон движется
со скоростью 50 кмч (это будет ![]() ),
),
в вагоне идет человек со скоростью 3
кмч (это будет ![]() ),
),
найти скорость человека относительно
Земли.
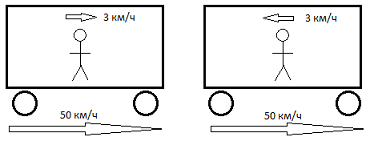 У
У
данной задачи будет два решения. Если
человек будет идти по направлению
движения вагона, то скорость человека
относительно Земли будет 53 кмч.
![]()
А
если человек будет идти против движения
вагона, то скорость человека относительно
Земли будет 47 кмч.
![]()
В
Формуле мы использовали :
![]() —
—
Конечная
скорость тела
— Скорость
тел в различных инерциальных системах
отчета
-
Свободные колебания. Пружинный маятник. Частота колебаний пружинного маятника (формула).
Колебания
называются свободными
(или собственными), если они совершаются
за счет первоначальной сообщенной
энергии при последующем отсутствии
внешних воздействий на колебательную
систему (систему, совершающую колебания).
Пружинный
маятник —
это груз массой т,
подвешенный на абсолютно упругой пружине
и совершающий гармонические колебания
под действием упругой
силы F = –kx, где k — жесткость
пружины.
Частота
пружинного маятника — Чем больше
период колебаний пружинного маятника,
тем меньше частота![]()
![]() —
—
Частота
Пружинного маятника,
![]() — Период
— Период
колебаний маятника
![]() —
—
Масса
груза, или масса маятника,
![]() —
—
Жесткость пружины
-
Угловая
скорость, частота вращения, период
вращения (определение, единицы измерения,
связь между величинами). Связь между
линейной и угловой скоростями.
Угловая
скорость численно равна углу поворота
радиуса за единицу времени.


Период
и частота
Период
вращения T –
это время, за которое тело совершает
один оборот.
Частота
вращение – это количество оборотов за
одну секунду.


Частота
и период взаимосвязаны соотношением

Связь
с угловой скоростью

Линейная
скорость точки.
Направление вектора линейной скорости
всегда совпадает с касательной к
окружности
Точка,
лежащая на окружности радиусом R,
за один оборот пройдет путь ![]() .
.
Поскольку время одного оборота тела
есть период T,
то модуль линейной скорости точки можно
найти так:
![]()
Так
как ![]() ,
,
то
![]()
-
Условия
возникновения затухающих колебаний
(соотношение между собственной частотой
и коэффициентом затухания). Амплитуда
затухающих колебаний (формула).
Соотношение:
![]()
β – коэффициент затухания. Этот коэффициент
характеризует скорость затухания
колебаний, При наличии сил сопротивления
энергия колеблющейся системы будет
постепенно убывать, колебания будут
затухать.
Амплитуда колебаний –
это максимальное расстояние, на
которое удаляется
колеблющееся тело от своего положения
равновесия. Амплитуда
затухающих колебаний изменяется по
закону ![]() ,
,
где А0 –
начальная амплитуда. Зависимость
амплитуды показана на рис. 8.3.
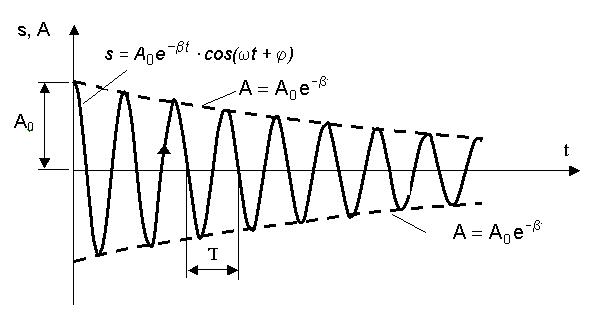 Рис.
Рис.
8.3. График затухающих колебаний
-
Механическая
работа (определение, единицы измерения).
Мощность силы (определение, единицы
измерения).

Механическая
рабоат
– то
скалярная физическая величина, которая
характеризует процесс перемещения тела
под действием силы и равна произведению
модуля силы F на модуль перемещения S и
на косинус угла ![]() между
между
ними
Если
тело под действием силы ![]() совершает
совершает
перемещение ![]() ,
,
работа А этой
силы равна скалярному произведению
силы на вектор перемещения. Работа силы
есть скалярная величинаА=![]()
А=![]()
![]()
мощность
силы —
скалярная физическая величина N, равная
отношению работы А, совершаемой силой,
к промежутку времени ![]() ,
,
в течение которого она совершается:
 Работа
Работа
силы, совершаемая в единицу времени,
называется мощностью.
Мощность N это
физическая величина, равная отношению
работы A к
промежутку времени t,
в течение которого совершена эта
работа: ![]()
В
Международной системе (СИ) единица
мощности называется ватт
(Вт).
Ватт равен мощности силы, совершающей
работу в 1 Дж за время 1 с. ![]()
Если
тело движется прямолинейно и на него
действует постоянная сила, то она
совершает работу ![]() .
.
Поэтому мощность этой силы![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Колебательное движение. Математический маятник
- Механические колебания
- Математический маятник
- Параметры колебаний математического маятника
- Задачи
- Лабораторная работа №4. Исследование колебаний математического маятника
п.1. Механические колебания
Кроме прямолинейного и криволинейного движения, с которыми мы уже познакомились, существует еще один вид механического движения – колебательный.
Механические колебания – это движения тел, которые в той или иной степени повторяются через определенные промежутки времени.
Примеры колебательных движений:
- движение маятника в часах;
- колебание автомобиля на рессорах;
- покачивание деревьев на ветру;
- раскачивание качели;
- сокращения сердца и легких;
- движение крыльев насекомых и птиц.
п.2. Математический маятник
Математическим маятником называют тело, подвешенное на длинной нерастяжимой нити, размеры которого значительно меньше длины нити.
Нить считается нерастяжимой и невесомой, а тело – материальной точкой на этой нити.
 |
В положении равновесия тело (шарик) находится внизу. Отклонение от положения равновесия называют смещением тела, обозначают буквой x и измеряют в метрах (в СИ). Наибольшее смещение маятника от положения равновесия называют амплитудой колебаний, обозначают буквой A. В проекции на горизонтальную ось OX смещение изменяется в интервале (-Aleq xleq A). В положении равновесия x=0. Если маятник после смещения в положение 1, прошел положение равновесия 2, отклонился в положение 3, опять прошел положение 2, и вернулся в положение 1, говорят, что маятник совершил полное колебание. |
п.3. Параметры колебаний математического маятника
Период колебаний математического маятника – это время, за которое маятник совершает одно полное колебание. Период колебаний равен: $$ T=2pisqrt{frac Lg} $$ где (L) – длина маятника, (g) – ускорение свободного падения.
На поверхности Земли (gapprox 9,8 м/с^2)
Частота колебаний математического маятника – это количество полных колебаний, которые маятник совершает за единицу времени: $$ f=frac 1T=frac{1}{2pi}sqrt{frac gL} $$
Период и частота колебаний – взаимно обратные величины
Период в СИ измеряют в секундах, частоту – в герцах: 1 Гц=1 c-1
Формула для периода колебаний справедлива для небольших отклонений маятника (на угол порядка 15-20° от положения равновесия).
п.4. Задачи
Задача 1. Маятник совершил 3 полных колебания за 9 с. Найдите период и частоту его колебаний. Чему равна длина нити, на которой подвешен маятник (ответ дайте в см, с округлением до целых)?
Дано:
(N=3)
(t=9 c)
__________________
(T, f, L-?)
Период колебаний: (T=frac tN)
Частота колебаний: (f=frac 1T=frac Nt)
Длина нити: $$ T=2pisqrt{frac Lg}Rightarrow sqrt{frac Lg}=frac{T}{2pi}Rightarrow frac Lg=left(frac{T}{2pi}right)^2Rightarrow L=gleft(frac{T}{2pi}right)^2 $$ Подставляем: begin{gather*} T=frac 93=3 (c)\ f=frac 13 (Гц)\ L=9,8cdotleft(frac{3}{2pi}right)^2approx 2,234 (м)approx 223 (см) end{gather*} Ответ: 3 с; 1/3 Гц; 223 см
Задача 2. Математический маятник колеблется с частотой 20?тиы кГц. Найдите период колебаний и число колебаний в минуту.
Дано:
(f=20 кГц=2cdot 10^4 Гц)
(t=1 мин=60 с)
__________________
(T, N-?)
Период колебаний: (T=frac 1f)
Частота колебаний за время (t: N=ft)
Подставляем: begin{gather*} T=frac{1}{2cdot 10^4}=0,5cdot 10^{-4} (c)=50cdot 10^{-6} (c)=50 (мкс)\ N=2cdot 10^4cdot 60=1,2cdot 10^6 end{gather*} Ответ: 50 мкс; 1,2·106
Задача 3. Расстояние от улья до цветочного поля 600 м. Пчела летит за нектаром со скоростью 8 м/с и машет крылышками с частотой 440 Гц. Возвращаясь в улей с нектаром, пчела летит со скоростью 5 м/с и машет крылышками с частотой 320 Гц. Найдите разность в количестве взмахов крылышками на пути туда и обратно.
Дано:
(s=600 м )
(v_1=8 м/с)
(f_1=440 Гц)
(v_2=5 м/с)
(f_2=320 Гц)
__________________
(triangle N-?)
Время полета из улья за нектаром (t_1=frac{s}{v_1})
Количество взмахов крылышками (N_1=f_1 t_1=f_1frac{s}{v_1})
Аналогично количество взмахов на пути назад (N_2=f_2frac{s}{v_2})
Найдем каждое из (N): begin{gather*} N_1=440cdotfrac{600}{8}=33000\ N_2=320cdotfrac{600}{5}=38400 end{gather*} На пути обратно пчела с грузом делает больше взмахов. Искомая разность: $$ triangle N=N_2-N_1=38400-33000=5400 $$ Ответ: 5400
Задача 4. Определите длину математического маятника с периодом колебаний 1с, если он находится: а) на Луне ((g_л=1,6 м/с^2)); б) на Марсе ((g_м=3,6 м/с^2)). Ответ запишите в см, с точностью до десятых.
Дано:
(T=1 с )
(g_л=1,6 м/с^2 )
(g_м=3,6 м/с^2)
__________________
(L_л, L_м-?)
Длина нити: begin{gather*} T=2pisqrt{frac Lg}Rightarrowsqrt{frac Lg} =frac{T}{2pi}Rightarrowfrac Lg=left( frac{T}{2pi}right)^2Rightarrow L = gleft(frac{T}{2pi}right)^2 end{gather*} На Луне: $$ L_л=1,6cdotleft(frac{1}{2pi}right)^2approx 0,0405 (м)approx 4,1 (см) $$ На Марсе: $$ L_м=3,6cdotleft(frac{1}{2pi}right)^2approx 0,0912 (м)approx 9,1 (см) $$ Ответ: 4,1 см; 9,1 см
п.5. Лабораторная работа №4. Исследование колебаний математического маятника
Цель работы
Исследовать, от каких величин зависит период колебаний математического маятника.
Теоретические сведения
При малых отклонениях (порядка 15-20° от вертикали) период колебаний математического маятника определяется формулой: $$ T=2pisqrt{frac Lg} $$ где (L) – длина маятника, (g) – ускорение свободного падения.
Для работы принять (gapprox 9,80665 м/с^2).
При заданном периоде колебаний для длины маятника получаем: $$ L=gleft(frac{T}{2pi}right)^2 $$
Приборы и материалы
Два лабораторных грузика по 100 г, крепкая нить (1,5-2 м), линейка (30-50 см), штатив, секундомер.
Ход работы
1. Рассчитайте длину нитей, необходимых для создания маятников с периодами колебаний (T_1=1 с; T_2=2 с).
2. Закрепите один грузик на нити и подвесьте его на штативе так, чтобы длина подвеса была равна расчетной длине (L_1).
3. Отклоните грузик на небольшой угол, отпустите его и с помощью секундомера измерьте время, за которое маятник совершит 10 полных колебаний. Повторите опыт 5 раз. Проведите расчеты для определения периода колебаний (T_{1 эксп}) по методике, изложенной в лабораторной работе №2 (см. §4 данного справочника).
4. Теперь подвесьте грузик так, чтобы длина подвеса была равна расчетной длине (L_2). Повторите серию из 5 экспериментов и определите (T_{2 эксп}).
5. При длине подвеса (L_2) подвесьте к первому грузику второй. Повторите серию из 5 экспериментов и определите (T ‘). Сравните (T ‘) и (T_{2 эксп}).
6. Сделайте выводы о проделанной работе.
Результаты измерений и вычислений
Расчет длины нитей begin{gather*} L=gleft(frac{T}{2pi}right)^2\ T_1=1 c, L_1=9,80665cdotleft(frac{1}{2pi}right)^2approx 0,248 (м)=24,8 (см)\ T_2=2 c, L_1=9,80665cdotleft(frac{2}{2pi}right)^2approx 0,9994 (м)=99,4 (см) end{gather*}
Определение (T_{1 эксп})
Инструментальная погрешность секундомера (d=frac{triangle}{2}=0,1 c)
Время 10 колебаний
| № опыта | 1 | 2 | 3 | 4 | 5 | Сумма |
| (t, c) | 9,7 | 10,2 | 9,8 | 9,9 | 10,3 | 50 |
| (triangle c) | 0,3 | 0,2 | 0,2 | 0,1 | 0,3 | 1 |
begin{gather*} t_{cp}=frac{50}{5}=10\ triangle_{cp}=frac 15=0,2 end{gather*} Среднее абсолютное отклонение больше инструментальной погрешности, поэтому абсолютная погрешность измерений: $$ triangle t=maxleft{d;triangle_{cp}right}=maxleft{0,1;0,2right}=0,2 text{c} $$ Результат измерения времени 10 колебаний: begin{gather*} t=t_0pmtriangle t, t=(10,0pm 0,2) c end{gather*} Период колебаний в 10 раз меньше: $$ T_{1 эксп}=frac{1}{10}(t_0pmtriangle t), T_{1 эксп}=(1,00pm 0,02) c $$ Относительная погрешность измерений: $$ delta_T=frac{triangle T}{T_{1 эксп}}cdot 100text{%}=frac{0,02}{1}cdot 100text{%}=2,0text{%} $$
Определение (T_{2 эксп})
Время 10 колебаний
| № опыта | 1 | 2 | 3 | 4 | 5 | Сумма |
| (t, c) | 19,7 | 20,1 | 19,8 | 20,2 | 19,7 | 99,5 |
| (triangle c) | 0,2 | 0,2 | 0,1 | 0,3 | 0,2 | 1 |
begin{gather*} t_{cp}=frac{99,5}{5}=19,9\ triangle_{cp}=frac 15=0,2 end{gather*} Среднее абсолютное отклонение больше инструментальной погрешности, поэтому абсолютная погрешность измерений: $$ triangle t=maxleft{d;triangle_{cp}right}=maxleft{0,1;0,2right}=0,2 text{c} $$ Результат измерения времени 10 колебаний: begin{gather*} t=t_0pmtriangle t, t=(19,9pm 0,2) c end{gather*} Период колебаний в 10 раз меньше: $$ T_{2 эксп}=frac{1}{10}(t_0pmtriangle t), T_{2 эксп}=(1,99pm 0,02) c $$ Относительная погрешность измерений: $$ delta_T=frac{triangle T}{T_{2 эксп}}cdot 100text{%}=frac{0,02}{1,99}cdot 100text{%}approx 1,0text{%} $$
Определение (T ‘) (с двумя грузиками)
Время 10 колебаний
| № опыта | 1 | 2 | 3 | 4 | 5 | Сумма |
| (t, c) | 20,2 | 19,7 | 19,6 | 20,0 | 20,3 | 99,8 |
| (triangle c) | 0,24 | 0,26 | 0,36 | 0,04 | 0,34 | 1,24 |
begin{gather*} t_{cp}=frac{99,8}{5}=19,96\ triangle_{cp}=frac{1,24}{5}approx 0,25 end{gather*} Среднее абсолютное отклонение больше инструментальной погрешности, поэтому абсолютная погрешность измерений: $$ triangle t=maxleft{d;triangle_{cp}right}=maxleft{0,1;0,25right}=0,25 text{c} $$ Результат измерения времени 10 колебаний: begin{gather*} t=t_0pmtriangle t, t=(19,96pm 0,25) c end{gather*} Период колебаний в 10 раз меньше: $$ T’=frac{1}{10}(t_0pmtriangle t), T’=(1,996pm 0,025) c $$ Относительная погрешность измерений: $$ delta_T=frac{triangle T}{T’}cdot 100text{%}=frac{0,025}{1,996}cdot 100text{%}approx 1,3text{%} $$
Полученные на опыте интервалы для (T_{2 эксп}) и (T’) (одинаковая длина нити (L_2) и разные массы грузиков – 100 г и 200 г соответственно): begin{gather*} 1,97leq T_{2 эксп}leq 2,01\ 1,971leq T’leq 2,021 end{gather*} Таким образом, (T_{2 эксп}approx T’), т.е. период колебаний математического маятника не зависит от массы груза.
Выводы
На основании проделанной работы можно сделать следующие выводы.
В работе с помощью расчетной формулы были определены длины нитей подвеса для маятников с периодами колебаний (T_1=1 с; T_2=2 с).
Полученный на опыте период колебаний для подвеса с (L_1=24,8 см) с грузиком 100 г равен $$ T_{1 эксп}=(1,00pm 0,02) c, delta=2,0text{%} $$ Полученный на опыте период колебаний для подвеса с (L_2=99,4 см) с грузиком 100 г равен $$ T_{2 эксп}=(1,99pm 0,02) c, delta=1,0text{%} $$ Полученный на опыте период колебаний для подвеса с (L_2=99,4 см) с грузиком 200 г равен $$ T’=(1,996pm 0,025) c, delta=1,3text{%} $$ Формула (T=2pisqrt{frac Lg}) данными экспериментами подтверждена.
Период колебаний математического маятника зависит от длины подвеса и не зависит от массы грузика на подвесе.
