-
Расчет обмоточных данных
Полная обмотка
АД, размещенная в магнитопроводе его
статора, состоит из трех самостоятельных
фазных обмоток, каждая из которых имеет
свои выводы.
Каждая фазная
обмотка состоит из фазных катушек, или
катушечных групп, соединенных
соответствующим образом.
Под катушечной
группой понимается ряд последовательно
соединенных между собой секций,
принадлежащих одной фазе в одной паре
полюсов.
Секция
является частью катушечной группы и
представляет собой катушку из обмоточного
провода, число витков которой определяется
специальным расчетом , минимальное
число равно одному витку. Каждый виток
состоит из двух активных проводников,
уложенных в пазы магнитопровода статора
двигателя, и двух лобовых частей,
соединяющих эти активные проводники.
Активными они являются потому что именно
в них магнитный поток машины A
индуктирует ЭДС.
Полюсом в
расточке статора АД принято называть
часть магнитопровода, охватывающего
рядом расположенные пазы, в которых
активные проводники обмотки имеют одно
и тоже направление тока.
Любой тип
обмотки трехфазной машины переменного
тока характеризуется следующими
обмоточными данными: N–
число катушечных групп; y–
шаг обмотки; q–
число пазов на полюс и фазу; α–
число электрических градусов, приходящихся
на один паз; а–
число параллельных ветвей.
Так как в
витке ток в одной стороне направлен в
одну сторону, а в другой в противоположную,
каждая фазная катушка обмотки участвует
в создании пары полюсов.
В двухслойной
обмотке число катушечных групп в одной
фазе равно:
![]()
(18)
![]()
шт.
На три
фазы:
![]()
(19)
где m–
количество фаз.
![]()
шт.
Шаг обмотки
– это расстояние, выраженное в зубцах,
между активными сторонами одной и той
же секции
![]()
,
(20)
где
![]()
–
расчетный шаг;
![]()
– произвольное число меньше 1, доводящее
расчетный шаг до целого значения.
![]()
.
Определим
укороченный шаг обмотки
![]()
,
(21)
![]()
Число пазов
на полюс и фазу определяет число секций
в катушечной группе и находится по
формуле
![]()
,
(22)
![]()
.
Число
электрических градусов, приходящихся
на один паз, равно:
![]()
,
(23)
![]()
.
Параллельные
ветви в обмотке АД делаются для сокращения
сечения обмоточного повода, кроме того
это дает возможность лучше загрузить
магнитную систему машины. Для данного
двигателя примем число параллельных
ветвей а=1.
В этом случае все катушечные группы
одной фазы будут соединены последовательно.
-
Построение двухслойной обмотки трехфазного ад
Построение
двухслойной обмотки принципиально не
отличается от построения однослойной
обмотки и выполняется по следующим
этапам:
-
укладываются
секции катушечных групп всех трех фаз; -
проводится
соединение этих групп в обмотки с
требуемым числом параллельных ветвей; -
для
принятого момента времени производится
векторная диаграмма токов и на развернутой
схеме обмоток показываются их направление
в расточке статора, находится положение
полюсов.
Для получения
вращающегося магнитного поля трёхфазного
асинхронного двигателя, при любой схеме
обмотки, требуется:
1. Смещение в
пространстве расточки статора асинхронного
двигателя фазных обмоток, одна относительно
другой на 120эл.
2. Смещение во
времени токов, протекающих по этим
обмоткам, на 1/3 периода.
Первое условие
выполняется соответствующей укладкой
катушечных групп трёхфазной обмотки,
второе – подключением асинхронного
двигателя к сети трёхфазного тока.
При построении
схемы, обмотка первой фазы может в общем
начинаться с любого паза. Поэтому первую
активную сторону секции помещаем в
первый паз. Вторую активную сторону
секции помещаем через 12 зубцов в 13 паз.
Число катушечных
групп одной фазы будет четыре (просчитано
выше)
В однослойной
обмотке первая катушечная группа
участвует в создании первой пары полюсов,
вторая – должна создавать вторую пару
полюсов, следовательно, расстояние
между ними должно быть равно одной паре
полюсов, т. е. 360 электрических градусов.
В отличие от
однослойных в двухслойных обмотках
катушечные группы одной и той же фазы
сдвигаются не на 360 электрических
градусов, а на 180.
Поэтому:
![]()
.
Следовательно,
вторая катушка фазы «А» начинается с
13-го паза.
Обмотка фаз «В» и
«С» выполняется аналогично, но они
сдвинуты, соответственно, на 120 и 240
электрических градусов относительно
обмотки фазы «А», т. е. В пазах это будет:
![]()
;
![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Число – фаза – обмотка – статор
Cтраница 1
Число фаз обмоток статора и ротора в принципе может быть любым.
[2]
Если числа фаз обмоток статора и ротора будут различны, то получится электромеханический преобразователь числа фаз.
[3]
По числу фаз обмотки статора асинхронные двигатели делятся на трехфазные, двухфазные и однофазные.
[5]
Что касается устройства обмотки ротора, то следует отметить, что число фаз ее может быть и не равно числу фаз обмотки статора; например, у трехфазного асинхронного двигателя ротор может быть многофазным. Возможность этого различия в числе фаз обмоток обусловлена тем, что многофазная обмотка независимо от числа ее фаз создает вращающееся магнитное поле с тем числом полюсов, на которое она построена.
[7]
У асинхронного двигателя с фазным ротором в пазы укладывают изолированную от сердечника обмотку 6 ( рис. 22), число фаз которой равно числу фаз обмотки статора. Фазы трехфазной обмотки ротора соединяются звездой с помощью медной шины 14 с тремя отпайками или треугольником.
[9]
Гь, xas – активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки статора; г к, XOR – активное сопротивление и индуктивное сопротивление рассеяния обмотки ротора, приведенные к числу витков и числу фаз обмотки статора; хт – сопротивление взаимной индуктивности.
[10]
Можно показать на основе метода усреднения [3], широко используемого при анализе широтно-импульсных преобразователей, что при применении в качестве АЙН инвертора фазных напряжений этот преобразователь с достаточной точностью может быть представлен совокупностью из т несвязанных непрерывных линейных усилительных звеньев, где т – число фаз обмотки статора АД. Это объясняется тем, что широтно-импульсная модуляция, применяемая в законе управления инвертором, обеспечивает усредненное формирование кривой требуемой формы. Таким образом, метод усреднения позволяет линеаризовать инвертор и принять допущение о его непрерывности. В этом случае задачи анализа и синтеза системы управления приводом переменного тока, по сути, могут быть сведены к задачам анализа и синтеза системы управления АД.
[11]
Требование равенства частот вращения бегущих волн МДС ротора у статора жестко определяет лишь равенство числа полюсов. Число фаз обмоток статора и ротора в принципе может быть любым.
[13]
При этом условии бегущие волны МДС ротора и статора будут неподвижны одна относительно другой и будут взаимодействовать между собой, обеспечивая передачу мощности из статора в ротор так же, как и в трансформаторе. В результате ток ротора / 2 будет создавать компенсирующую его составляющую тока статора / 2, и результирующий магнитный поток останется примерно таким же, как и при режиме холостого хода. Требование равенства частот вращения бегущих волн МДС ротора и статора жестко определяет лишь равенство числа полюсов. Число фаз обмоток статора и ротора может быть любым.
[14]
Pi р2 Р – При этом условии бегущие волны МДС ротора и статора неподвижны одна относительно другой и взаимодействуют между собой, обеспечивая передачу мощности из статора в ротор так же, как и в трансформаторе. В результате ток ротора 12 создает компенсирующую его составляющую тока статора Г2 и результирующий магнитный поток остается примерно таким же, как и при режиме холостого хода. Требование равенства частот вращения бегущих волн МДС ротора и статора жестко определяет лишь равенство числа полюсов. Число фаз обмоток статора и ротора может быть любым.
[15]
Страницы:
1
2
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
|
U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
|
|
| Полезная мощность на валу, кВт |
|
Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
|
|
| Вращающий момент двигателя, кГм |
|
nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
|
f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
|
|
| Скорость вращения ротора при нагрузке, об/мин |
|
|
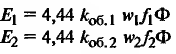
| ЭДС обмоток статора и ротора, В |
|
kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
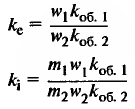
| Коэффициенты трансформации по напряжению и по току |
|
w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
|
zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
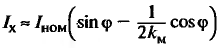
| Ток холостого хода, А |
|
Iном. – номинальный ток двигателя, А |
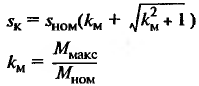
| Критическое скольжение |
|
sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
| Уравнение вращающего момента |
|
Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
|
|
| КПД двигателя при введении добавочного сопротивления в ротор |
|
|
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
|
U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателя
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
В пазах сердечника статора размешается трехфазная обмотка (в случае однофазных двигателей — двухфазная), которая соединяется с сетью трехфазного (однофазного) переменного тока. Трехфазная симметричная обмотка статора асинхронного двигателя состоит из трех однофазных обмоток, которые соединяются между собой по схеме звезда (У) или треугольник (Д). Между собой оси обмоток смещены в пространстве на электрический угол 360/m=360/3=120° (v— число фаз).
Два проводника, расположенных в пазах, отстоящих друг от друга на расстоянии у, называемом шагом обмотки, образуют простейший контур — виток. Каждый виток может состоять из нескольких параллельных (элементарных) проводников. Витки, уложенные в одну и ту же пару пазов и соединенные между собой последовательно, образуют катушку или секцию обмоткн. Совокупность катушек (секции), лежащих в соседних пазах b соединенных последовательно между собой, называется катушечной группой. Обмотка статора асинхронного двигателя состоит из совокупности катушечных групп, которые могут быть соединены последовательно, параллельно или последовательно-параллельно. Параллельно соединенные катушечные группы образуют параллельные ветви обмотки, число которых обозначается a1.
Расстояние между осями соседних зубцов (пазов) называется зубцовым делением t (измеряется в единицах длины или в градусах). Шаг обмотки у может измеряться в зубцовых делениих и в градусах. Часть окружности статора, приходящаяся на один полюс магнитного поля, называется полюсным делением τ. Полюсное деление может измеряться в единицах длины, градусах, зубцовых делениях. Для первых двух случаев полюсное деление рассчитывается по формуле
 (5)
(5)
где D — диаметр расточки статора, м; 2р —число полюсов магнитного поля двигателя.
Из формулы (5) следует, что геометрический угол, соответствующий полюсному делению, равен 180° для двухполюсной машины, 90° для четырехполюсной, 60° для шестиполюсной и т. д. Но по определению полюсное деление — часть окружности, приходящийся на один полюс. А полюс занимает всегда электрический угол 180°, или половину периода. Отсюда вытекает связь между электрическими и геометрическими углами в электрических машинах в виде
1° (геометрический угол)=р° (электрический угол). (6)
В частном случае, когда 2р=2, эти углы совпадают.
Шаг обмотки у, равный полюсному делению τ, называется диаметральным (обмотка с диаметральным шагом). Если у<τ, шаг обмотки называется укороченным, если у>τ — удлиненным. Разность τ—у называется укорочением. Относительное значение укорочения β равно:
β=у/τ . (7)
Расположенные в соседних пазах стороны катушек, занимают q зубцовых делений, называемых числом пазов на полюс и фазу. Зная число пазов на статоре z1, величину q1 для многофазных обмоток можно определить по формуле
q1=z1 (2pm), (8).
а для трехфазных обмоток
q1=z1/6p.
По -виду катушек обмотка статора асинхронного двигателя подразделяется на всыпные обмотки с мягкими катушками и обмотки с жесткими катушками. Мягкие катушки изготовляются из круглого медного или алюминиевого провода. Такие катушки наматываются на шаблоны, где им придается предварительная форма, и затем укладываются в изолированные трапецеидальние пазы (рис. 9). После укладки катушек и закрепления их в пазах с помощью клиньев или крышек производится формовка лобовых частей и бандажирование. Междуфазовые изоляционные прокладки устанавливаются в процессе укладки обмоток. Обмотанный таким образом статор подвергается пропитке. Весь процесс изготовления всыпных обмоток может быть полностью механизирован.
Рис. 9. Пазы и обмотки статора: а — полузакрытый паз, обмотка однослойная; б — полузакрытый паз, обмоткаг двухслойная; в — открытый паз. обмотка двухслойная.; г — полуоткрытый паз, обмотка однослойная; 1 — обмоточный провод; 2 — пазовая коробка; 3 — прокладка под клином; 4 — прокладка между слоями; 5 — пазовый клин
Жесткие катушки (или полукатушки) изготовляются из прямоугольного изолированного провода. Окончательная форма придается катушкам до укладки. В двигателях напряжением до 0,66 кВ пазовую изоляцию устанавливают в сердечник до укладки катушек, а сами катушки не изолируют. После укладки катушек в полуоткрытые пазы (рис. 9) обмотанный статор подвергают пропитке и сушке.
В двигателях напряжением 3 кВ и выше применяются катушки с корпусной изоляцией, которая наносится на катушки до укладки их в открытые пазы (рис. 9). В настоящее время применяется термопластичная изоляция и термореактивная изоляция типа «Монолит».
Всыпные обмотки статора асинхронного двигателя имеют следующие преимущества перед обмотками с жесткими катушками из прямоугольного провода:
- возможность полной механизации всего процесса изготовления;
- меньшая длина и вылет лобовых частей, а следовательно, и меньшие потери, более высокий КПД, меньшая длина активной части машины;
- более благоприятная с точки зрения использования зубцовой зоны трапецеидальная форма паза;
- меньшее открытие паза, обеспечивающее меньшие пульсации потока в воздушном зазоре, т. е. меньшие добавочные потери и намагничивающий ток;
- большая производственная технологичность: намотка катушечных групп, в ряде случаев и обмоток фаз, производится без разрыва, т. е. меньшее число паек; возможность укладки обмотки в пазы сердечника без корпуса облегчают и удешевляют обмотку и пропитку.
В силу этих достоинств мягкие всыпные обмотки статора асинхронного двигателя дешевле и менее трудоемки.
Достоинствами жестких обмоток являются больший коэффициент заполнения за счет применения прямоугольных проводов и большая надежность, связанная с меньшей технологической дефектностью, так как в пазы укладываются готовые изолированные и проверенные катушки, которые подвергаются меньшим деформациям.
В силу указанных преимуществ всыпные обмотки статора асинхронного двигателя являются предпочтительными для асинхронных двигателей на напряжение до 1 кВ и мощностью до 100 кВт. В двигателях мощностью выше 100 кВт и в двигателях напряжением 3 кВ и выше обмотки выполняются из прямоугольного провода (из жестких катушек).
По размещению катушек в пазах различаются однослойные и двухслойные обмотки. Сторона катушки однослойной обмотки занимает паз полностью, при двухслойной обмотке в пазу располагаются вместе две стороны различных катушек, одна из которых устанавливается на дне паза, а другая — в части паза, прилегающей к расточке статора.
Механизация укладки обмотки на электромашиностроительных заводах привела к широкому применению однослойных концентрических обмоток в двигателях мощностью до 10—15 кВт. Для двигателей большей мощности (15—100 кВт) применяются более трудоемкие одно-двухслойные и двухслойные всыпные обмотки из круглого провода. Для двигателей мощностью выше 100 квт, обмотка которых укладывается вручную, применяются двухслойные обмотки.
Одно-двухслойные концентрические обмотки сочетают в себе преимущества однослойных в части осуществления механизированной укладки и двухслойных (возможно укорочение шага и уменьшение длины лобовых частей).
При ремонте асинхронных двигателей при отсутствии механизированной укладки обмоток применяют двухслойные обмотки.
