Базисные (основные) и свободные (неосновные) переменные. Общее и базисное решения системы линейных алгебраических уравнений. Первая часть.
В теме “Теорема Кронекера-Капелли” было указано, что если ранг расширеной матрицы системы $widetilde{A}$ и ранг матрицы системы $A$ равны между собой, то заданная система линейных алгебраических уравнений (СЛАУ) совместна, т.е. имеет решение. Вопрос о количестве этих решений разрешим с помощью следствия из теоремы Кронекера. Согласно ему, если $rang A=rangwidetilde{A} = n$ ($n$ – количество неизвестных), то СЛАУ имеет единственное решение. Если же $rang A=rangwidetilde{A} < n$, то количество решений заданной СЛАУ бесконечно.
Особый интерес представляет именно случай $rang A=rangwidetilde{A} < n$, которым и займёмся в этой теме. Так как $rang A=rangwidetilde{A}$, то обозначим эти ранги просто буквой $r$, т.е. $rang A=rangwidetilde{A}=r$. Итак, $r < n$ и система неопределена, т.е. имеет бесконечное количество решений.
Что означает фраза “ранг матрицы равен $r$”? Она означает, что есть хотя бы один минор $r$-го порядка, который не равен нулю. Напомню, что такой минор называется базисным. Базисных миноров может быть несколько. При этом все миноры, порядок которых выше $r$, равны нулю или не существуют.
Если коэффициенты при $r$ переменных совместной СЛАУ образуют базисный минор матрицы системы $A$, то эти $r$ переменных называют базисными или основными. Остальные $n-r$ переменных именуют свободными или неосновными.
Выбрать $r$ базисных переменных в общем случае можно различными способами. В примерах я покажу наиболее часто используемый способ выбора.
Решение СЛАУ, в котором все свободные переменные равны нулю, называется базисным.
Во всех изложенных ниже примерах матрицу системы будем обозначать буквой $A$, а расширенную матрицу системы – буквой $widetilde{A}$.
Пример №1
Решить СЛАУ $
left { begin{aligned}
& 3x_1-6x_2+9x_3+13x_4=9\
& -x_1+2x_2+x_3+x_4=-11;\
& x_1-2x_2+2x_3+3x_4=5.
end{aligned} right.$. Если система является неопределённой, указать базисное решение.
Решение
Итак, мы имеем СЛАУ, у которой 3 уравнения и 4 переменных: $x_1$, $x_2$, $x_3$, $x_4$. Так как количество переменных больше количества уравнений, то такая система не может иметь единственное решение (чуть позже мы строго докажем это предложение на основе теоремы Кронекера-Капелли). Найдём решения СЛАУ, используя метод Гаусса:
$$
left( begin{array} {cccc|c}
3 & -6 & 9 & 13 & 9 \
-1 & 2 & 1 & 1 & -11 \
1 & -2 & 2 & 3 & 5 end{array} right) rightarrow
left|begin{aligned}
& text{поменяем местами первую и третью}\
& text{строки, чтобы первым элементом}\
& text{первой строки стала единица.}
end{aligned}right| rightarrow \
rightarrowleft( begin{array} {cccc|c}
1 & -2 & 2 & 3 & 5\
-1 & 2 & 1 & 1 & -11 \
3 & -6 & 9 & 13 & 9
end{array} right)
begin{array} {l} phantom{0} \ r_2+r_1\ r_3-3r_1 end{array} rightarrow
left( begin{array} {cccc|c}
1 & -2 & 2 & 3 & 5\
0 & 0 & 3 & 4 & -6 \
0 & 0 & 3 & 4 & -6
end{array}right)
begin{array} {l} phantom{0} \ phantom{0}\r_3-r_2end{array} rightarrow \
rightarrowleft( begin{array} {cccc|c}
1 & -2 & 2 & 3 & 5\
0 & 0 & 3 & 4 & -6 \
0 & 0 & 0 & 0 & 0
end{array}right)
$$
Мы завершили прямой ход метода Гаусса, приведя расширенную матрицу системы к ступенчатому виду. Слева от черты расположены элементы преобразованной матрицы системы, которую мы также привели к ступенчатому виду. Напомню, что если некая матрица приведена к ступенчатому виду, то её ранг равен количеству ненулевых строк.

И матрица системы, и расширенная матрица системы после эквивалентных преобразований приведены к ступенчатому виду; они содержат по две ненулевых строки. Вывод: $rang A=rangwidetilde{A} = 2$.
Итак, заданная СЛАУ содержит 4 переменных (обозначим их количество как $n$, т.е. $n=4$). Кроме того, ранги матрицы системы и расширенной матрицы системы равны между собой и равны числу $r=2$. Так как $r < n$, то согласно следствию из теоремы Кронекера-Капелли СЛАУ является неопределённой (имеет бесконечное количество решений).
Найдём эти решения. Для начала выберем базисные переменные. Их количество должно равняться $r$, т.е. в нашем случае имеем две базисные переменные. Какие именно переменные (ведь у нас их 4 штуки) принять в качестве базисных? Обычно в качестве базисных переменных берут те переменные, которые расположены на первых местах в ненулевых строках преобразованной матрицы системы, т.е. на “ступеньках”. Что это за “ступеньки” показано на рисунке:

На “ступеньках” стоят числа из столбцов №1 и №3. Первый столбец соответствует переменной $x_1$, а третий столбец соответствует переменной $x_3$. Именно переменные $x_1$ и $x_3$ примем в качестве базисных.
В принципе, если вас интересует именно методика решения таких систем, то можно пропускать нижеследующее примечание и читать далее. Если вы хотите выяснить, почему можно в качестве базисных взять именно эти переменные, и нельзя ли выбрать иные – прошу раскрыть примечание.
Примечание. показатьскрыть
Базисные переменные выбраны: это $x_1$ и $x_3$. Остальные $n-r=2$ переменных (т.е. $x_2$ и $x_4$) являются свободными. Нам нужно выразить базисные переменные через свободные.
Я предпочитаю работать с системой в матричной форме записи. Для начала очистим полученную матрицу $left( begin{array} {cccc|c}
1 & -2 & 2 & 3 & 5\
0 & 0 & 3 & 4 & -6 \
0 & 0 & 0 & 0 & 0
end{array}right)$ от нулевой строки:
$$
left( begin{array} {cccc|c}
1 & -2 & 2 & 3 & 5\
0 & 0 & 3 & 4 & -6
end{array}right)
$$
Свободным переменным, т.е. $x_2$ и $x_4$, соответствуют столбцы №2 и №4. Перенесём эти столбцы за черту. Знак всех элементов переносимых столбцов изменится на противоположный:

Почему меняются знаки? Что вообще значит это перенесение столбцов? показатьскрыть
А теперь продолжим решение обычным методом Гаусса. Наша цель: сделать матрицу до черты единичной. Для начала разделим вторую строку на 3, а потом продолжим преобразования обратного хода метода Гаусса:
$$
left( begin{array} {cc|ccc}
1 & 2 & 5 & 2 & -3\
0 & 3 & -6 & 0 & -4
end{array}right)
begin{array} {l} phantom{0} \ 1/3cdot{r_2} end{array} rightarrow
left( begin{array} {cc|ccc}
1 & 2 & 5 & 2 & -3\
0 & 1 & -2 & 0 & -4/3
end{array}right)
begin{array} {l} r_1-2r_2 \ phantom{0} end{array} rightarrow \
rightarrow left(begin{array} {cc|ccc}
1 & 0 & 9 & 2 & -1/3\
0 & 1 & -2 & 0 & -4/3
end{array}right).
$$
Матрица до черты стала единичной, метод Гаусса завершён. Общее решение найдено, осталось лишь записать его. Если вспомнить, что четвёртый столбец соответствует переменной $x_2$, а пятый столбец – переменной $x_4$, то получим:
$$
left{begin{aligned}
& x_1=9+2x_2-frac{1}{3}x_4;\
& x_2in R;\
& x_3=-2-frac{4}{3}x_4;\
& x_4 in R.
end{aligned}right.
$$
Нами получено общее решение заданной СЛАУ. Чтобы найти базисное решение, нужно все свободные переменные приравнять к нулю. Т.е. полагая $x_2=0$ и $x_4=0$, будем иметь:
$$
left{begin{aligned}
& x_1=9;\
& x_2=0;\
& x_3=-2;\
& x_4=0.
end{aligned}right.
$$
Решение $x_1=9$, $x_2=0$, $x_3=-2$, $x_4=0$ и является базисным решением данной СЛАУ. В принципе, задавая свободным переменным иные значения, можно получить иные частные решения данной системы. Таких частных решений бесконечное количество. Например, принимая $x_2=-4$ и $x_4=1$, получим такое частное решение: $left{begin{aligned}
& x_1=frac{2}{3};\
& x_2=-4;\
& x_3=-frac{10}{3};\
& x_4=1.
end{aligned}right.$. Базисное решение, которые мы нашли ранее – лишь одно из бесконечного множества частных решений заданной СЛАУ.
Если есть желание, то полученное решение можно проверить. Например, подставляя $x_1=9+2x_2-frac{1}{3}x_4$ и $x_3=-2-frac{4}{3}x_4$ в левую часть первого уравнения, получим:
$$
3x_1-6x_2+9x_3+13x_4=3cdot left(9+2x_2-frac{1}{3}x_4right)-6x_2+9cdot left(-2-frac{4}{3}x_4right)+13x_4=9.
$$
Проверка первого уравнения увенчалась успехом; точно так же можно проверить второе и третье уравнения.
Ответ: Общее решение: $left{begin{aligned}
& x_1=9+2x_2-frac{1}{3}x_4;\
& x_2in R;\
& x_3=-2-frac{4}{3}x_4;\
& x_4 in R.
end{aligned}right.$, базисное решение: $
left{begin{aligned}
& x_1=9;\
& x_2=0;\
& x_3=-2;\
& x_4=0.
end{aligned}right.$.
Пример №2
Решить СЛАУ
$$left{begin{aligned}
& x_1-2x_2+4x_3+2x_5=0;\
& 4x_1-11x_2+21x_3-2x_4+3x_5=-1; \
& -3x_1+5x_2-13x_3-4x_4+x_5=-2.
end{aligned}right.$$
Если система является неопределённой, указать базисное решение.
Решение
Похожий пример уже был решен в теме “метод Крамера” (пример №4). Переменные $x_4$ и $x_5$ были перенесены в правые части, а дальше применялись стандартные операции метода Крамера. Однако такой метод решения не гарантирует достижения результата. Например, мы переносим некие переменные в правую часть, а оставшийся определитель оказывается равным нулю, – что тогда? Решать перебором? 🙂 Поэтому гораздо удобнее применять преобразования метода Гаусса, как и в предыдущем примере.
$$
left( begin{array} {ccccc|c}
1 & -2 & 4 & 0 & 2 & 0\
4 & -11 & 21 & -2 & 3 & -1\
-3 & 5 & -13 & -4 & 1 & -2
end{array} right)
begin{array} {l} phantom{0} \r_2-4r_1\r_3+3r_1end{array} rightarrow
left( begin{array} {ccccc|c}
1 & -2 & 4 & 0 & 2 & 0\
0 & -3 & 5 & -2 & -5 & -1\
0 & -1 & -1 & -4 & 7 & -2
end{array} right) rightarrow \
rightarrow left|begin{aligned}
& text{поменяем местами вторую и третью}\
& text{строки, чтобы диагональным элементом}\
& text{второй строки стало число (-1).}
end{aligned}right|rightarrow
left( begin{array} {ccccc|c}
1 & -2 & 4 & 0 & 2 & 0\
0 & -1 & -1 & -4 & 7 & -2\
0 & -3 & 5 & -2 & -5 & -1
end{array} right)
begin{array} {l} phantom{0} \ phantom{0}\r_3-3r_1end{array} rightarrow \
rightarrow left( begin{array} {ccccc|c}
1 & -2 & 4 & 0 & 2 & 0\
0 & -1 & -1 & -4 & 7 & -2\
0 & 0 & 8 & 10 & -26 & 5
end{array} right).
$$
Матрица системы и расширенная матрица системы приведены к трапециевидной форме. Ранги этих матриц равны между собой и равны числу 3, т.е. $rang A=rangwidetilde{A} = 3$. Так как ранги равны между собой и меньше, чем количество переменных, то согласно следствию из теоремы Кронекера-Капелли данная система имеет бесконечное количество решений.
Количество неизвестных $n=5$, ранги обеих матриц $r=3$, поэтому нужно выбрать три базисных переменных и $n-r=2$ свободных переменных. Применяя тот же метод “ступенек”, что и в предыдущем примере, выберем в качестве базисных переменных $x_1$, $x_2$, $x_3$, а в качестве свободных переменных – $x_4$ и $x_5$.
Столбцы №4 и №5, которые соответствуют свободным переменным, перенесём за черту. После этого разделим третью строку на 8 и продолжим решение методом Гаусса:
$$
left( begin{array} {ccc|ccc}
1 & -2 & 4 & 0 & 0 & -2\
0 & -1 & -1 & -2 & 4 & -7\
0 & 0 & 8 & 5 & -10 & 26
end{array} right)
begin{array} {l} phantom{0} \ phantom{0}\1/8cdot{r_3}end{array} rightarrow
left( begin{array} {ccc|ccc}
1 & -2 & 4 & 0 & 0 & -2\
0 & -1 & -1 & -2 & 4 & -7\
0 & 0 & 1 & 5/8 & -5/4 & 13/4
end{array} right)
begin{array} {l}r_1-4r_3 \r_2+r_3\ phantom{0}end{array} rightarrow \
left( begin{array} {ccc|ccc}
1 & -2 & 0 & -5/2 & 5 & -15\
0 & -1 & 0 & -11/8 & 11/4 & -15/4\
0 & 0 & 1 & 5/8 & -5/4 & 13/4
end{array} right)
begin{array} {l} phantom{0} \ -1cdot{r_2}\ phantom{0}end{array} rightarrow
left( begin{array} {ccc|ccc}
1 & -2 & 0 & -5/2 & 5 & -15\
0 & 1 & 0 & 11/8 & -11/4 & 15/4\
0 & 0 & 1 & 5/8 & -5/4 & 13/4
end{array} right)
begin{array} {l}r_1+2r_2 \ phantom{0}\ phantom{0}end{array} rightarrow\
rightarrowleft( begin{array} {ccc|ccc}
1 & 0 & 0 & 1/4 & -1/2 & -15/2\
0 & 1 & 0 & 11/8 & -11/4 & 15/4\
0 & 0 & 1 & 5/8 & -5/4 & 13/4
end{array} right)
$$
Из последней матрицы имеем общее решение заданной СЛАУ: $left{begin{aligned}
& x_1=frac{1}{4}-frac{1}{2}x_4-frac{15}{2}x_5;\
& x_2=frac{11}{8}-frac{11}{4}x_4+frac{15}{4}x_5;\
& x_3=frac{5}{8}-frac{5}{4}x_4+frac{13}{4}x_5;\
& x_4 in R;\
& x_5 in R.
end{aligned}right.$. Базисное решение получим, если приравняем свободные переменные к нулю, т.е. $x_4=0$, $x_5=0$:
$$
left{begin{aligned}
& x_1=frac{1}{4};\
& x_2=frac{11}{8};\
& x_3=frac{5}{8};\
& x_4=0;\
& x_5=0.
end{aligned}right.
$$
Ответ: Общее решение: $left{begin{aligned}
& x_1=frac{1}{4}-frac{1}{2}x_4-frac{15}{2}x_5;\
& x_2=frac{11}{8}-frac{11}{4}x_4+frac{15}{4}x_5;\
& x_3=frac{5}{8}-frac{5}{4}x_4+frac{13}{4}x_5;\
& x_4 in R;\
& x_5 in R.
end{aligned}right.$, базисное решение: $left{begin{aligned}
& x_1=frac{1}{4};\
& x_2=frac{11}{8};\
& x_3=frac{5}{8};\
& x_4=0;\
& x_5=0.
end{aligned}right.$.
Продолжение этой темы рассмотрим во второй части, где разберём ещё два примера с нахождением общего решения.
Рассмотрим
однородную систему (2). Мы можем переставлять
уравнения местами, прибавлять к одному
уравнению другое, умноженное на число,
и всякий раз получать новую систему,
эквивалентную
старой, то есть имеющую то же самое
множество решений. Эти операции удобней
производить над строками матрицы А
системы, и ясно, что они соответствуют
элементарным преобразованиям строк.
Приведем с помощью элементарных
преобразований матрицу А
к ступенчатому виду. Переменные хi,
соответствующие угловым элементам
(т.е. имеющие те же номера, что и номера
столбцов, содержащих угловые элементы)
назовем главными
или зависимыми,
остальные – свободными
или
независимыми.
Выпишем систему,
отвечающую ступенчатому виду

и перенесем в
каждом уравнении все члены со свободными
переменными вправо. Слева останутся
выражения, содержащие только зависимые
переменные. Система приобретет вид:
зависимые
свободные

Пусть для простоты
х1,
х2,
…, хr
– зависимые, а хr+1,
…, хn
– свободные. Тогда новая система имеет
вид:

Итак, матрица
коэффициентов при зависимых переменных
– треугольная
(квадратная матрица, все элементы
которой, расположенные ниже главной
диагонали, равны нулю) и при этом
![]() .
.
Это былпрямой
ход метода Гаусса.
Сделаем обратный
ход: из
последнего уравнения выразим хr
через свободные переменные и подставим
полученное выражение в предпоследнее
уравнение, затем выразим хr-1
через свободные переменные и подставим
выражения для хr,
хr-1
в предыдущее («предпредпоследнее», т.е.
(r 2)-е)
уравнение и т.д. В результате получим
выражения зависимых переменных х1,
х2,
…, хr
через свободные хr+1,
…, хn

(3)
Выражения (3) задают
множество решений однородной системы
(2). Свободным переменным хr+1,
…, хn
мы можем придавать любые значения (они
играют роль произвольных параметров
для множества решений системы) в то
время как зависимые переменные получают
соответствующие значения, вычисляемые
по формулам (3). Всякий раз мы получаем
некоторое решение, и все решения могут
быть таким образом получены. Поэтому
систему (3) называют общим
решением в координатной форме
системы (2). Иногда его представляют так:

(4)
где отчетлива
видно, что свободным переменным хr+1,
…, хn
отводится роль параметров с1,
…, сnr
.
Поскольку общее
число зависимых и независимых переменных
равно n,
а число зависимых переменных равно
рангу матрицы А,
то
размерность
подпространства решений однородной
системы
dim L
=n–
rank А.
Общее решение (3)
позволяет найти базис в подпространстве
L
решений системы (2) и представить общее
решение как произвольную линейную
комбинацию элементов этого базиса.
Свободным переменным хr+1,
…, хn
будем последовательно придавать
значения, соответствующие координатам
векторов стандартного базиса в Rnr:
 .
.
Наборам е1,
…, еnr
свободных переменных соответствуют
векторы
 ,
,
составляющие базис
в L.
Определение.
Базис в подпространстве решений
однородной системы называется
фундаментальной
системой решений
(ФСР).
Линейная комбинация
элементов ФСР
![]() (5)
(5)
есть произвольный
вектор из L.
Запись (5) называется общим
решением в векторной форме
системы (2).
Итак, размерность
подпространства L
есть n r,
где
![]() .
.
Чем меньшеrank А,
тем большую размерность имеет
L
и наоборот. В случае, когда
![]() (т.е.А
(т.е.А
имеет «полный ранг»),
![]() ,
,
т.е.L
имеет нулевую размерность, и, значит,
состоит лишь из нулевого вектора
![]() .
.
В этом случае (2) имеет единственное
нулевое решение.
Пример. Решить
систему

Матрица системы
уже имеет ступенчатый
вид. Значит, прямой ход метода Гаусса
делать не нужно. Зависимые переменные
– это х1
и х3
(соответствуют угловым элементам
матрицы), свободные – х2
и х4.
Перенесем члены
со свободными переменными вправо:

Обратный ход метода
Гаусса: подставляем
![]() в первое уравнение:
в первое уравнение:
![]() .
.
Итак:

– общее решение
в координатной форме.
Запишем общее
решение в векторной форме. Возьмем
стандартный базис в R2:
 .
.
Находим ФСР.
Положим:
1)
![]() .
.
Получим
 ;
;
2)
![]()
Получим
 .
.
Векторы
![]() образуют ФСР.
образуют ФСР.
Общее решение
однородной системы в векторной форме:
 .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание
Системы линейных уравнений
Обозначим через $ mathbb A_{} $ любое из множеств $ mathbb Q_{}, mathbb R_{} $ или $ mathbb C_{} $.
Системой линейных (алгебраических) уравнений (СЛАУ или просто СЛУ) над $ mathbb A_{} $ называется совокупность (набор) из нескольких уравнений вида
$$
left{
begin{array}{lllll}
a_{11}x_1 &+a_{12}x_2&+ ldots&+a_{1n}x_n &=b_1,\
a_{21}x_1 &+a_{22}x_2&+ ldots&+a_{2n}x_n &=b_2,\
dots & & & & dots \
a_{m1}x_1 &+a_{m2}x_2&+ ldots&+a_{mn}x_n &=b_m
end{array} right.
$$
от одного и того же набора переменных (неизвестных) $ x_{1},dots,x_n $.
Здесь числа $ left{a_{j k} right}_{j=1,dots,m atop k=1,dots,n } $ и $ { b_{j} }_{j=1,dots,m} $ — из $ mathbb A_{} $ ; они называются коэффициентами системы.
Первый индекс у коэффициента $ a_{j k} $ отвечает за номер уравнения, а второй — за номер переменной.
П
Примеры систем уравнений над $ mathbb R $.
$$
left{begin{array}{rrrr}
2,x & + y & + z &=1, \
x &+ 2, y &+ z & = 2.
end{array}
right.
$$
Допустимо, чтобы в системе были одинаковые уравнения; также формально не запрещается записывать взаимно противоречивые уравнения:
$$
left{begin{array}{rrrr}
x_1 & + x_2 & + x_3 &=1, \
x_1 & + x_2 & + x_3 &=1, \
x_1 & + x_2 & + x_3 &=2, \
x_1 & + x_2 & + x_3 &=3.
end{array}
right.
$$
Более того, подобные — очевидно «бессмысленные» — системы имеют право не только на формальное существование — см.
☞
ЗДЕСЬ. В следующей системе
$$
left{begin{array}{rrrrrr}
sqrt[3]{3}x_1 & & & + x_4 & + e^{pi} x_5 &=0, \
x_1 & & & -2, x_4 & &=3/9, \
-57,x_1 & & & & &=2, \
& & & & &0=1 \
end{array}
right.
$$
надо специально договариваться относительно каких переменных она рассматривается. Формально в ней присутствуют только переменные $ x_1, x_4 $ и $ x_5 $. Однако, возможно, что на самом деле в этой системе предполагается, что имеются еще и переменные $ x_2,x_3 $ с нулевыми коэффициентами при этих переменных. Последнее уравнение не содержит переменных вовсе; тем не менее, этот случай также формально допустим.
♦
Относительно числа $ m_{} $ уравнений не делается ни какого предположения: оно может быть меньше, больше или равно числу переменных $ n_{} $. Если $ m_{}>n $ то система называется переопределенной. Решением системы уравнений называется любой набор значений переменных
$ x_1=alpha_{1},dots, x_n = alpha_n $, обращающий каждое из уравнений в истинное равенство. Система называется совместной если она имеет хотя бы одно решение и несовместной в противном случае.
!
Можно доказать (см. результаты
☟
НИЖЕ ), что все возможности для произвольной системы ограничиваются следующими вариантами:
1.
система совместна и имеет единственное решение;
2.
cистема совместна и имеет бесконечное множество решений;
3.
cистема несовместна.
При этом все решения будут находиться в том же множестве $ mathbb A_{} $, что и коэффициенты системы.
Задача о существовании целочисленных решений системы уравнений с коэффициентами из $ mathbb Z_{} $ рассматривается отдельно, т.к. методы ее решения отличаются от здесь излагаемых.
Матричная форма записи
Для системы линейных уравнений относительно переменных $ x_1,x_2,dots,x_n $
$$
left{
begin{array}{lllll}
a_{11}x_1 &+a_{12}x_2&+ ldots&+a_{1n}x_n &=b_1,\
a_{21}x_1 &+a_{22}x_2&+ ldots&+a_{2n}x_n &=b_2,\
dots & & & & dots \
a_{m1}x_1 &+a_{m2}x_2&+ ldots&+a_{mn}x_n &=b_m.
end{array} right.
$$
матрицей системы называется матрица
$$
A=left(
begin{array}{llcl}
a_{11} & a_{12} & dots & a_{1n} \
a_{21} & a_{22} & dots & a_{2n} \
dots &&& dots \
a_{m1} & a_{m2} & dots & a_{mn}
end{array}
right)_{mtimes n} ;
$$
cтолбец
$$
{mathcal B} =
left(
begin{array}{l}
b_{1} \
b_{2} \
vdots \
b_{m}
end{array}
right)
$$
называется столбцом правых частей системы, а столбец
$$
X=
left(
begin{array}{l}
x_{1} \
x_{2} \
vdots \
x_{n}
end{array}
right)
$$
— столбцом неизвестных.
Используя правило умножения матриц, систему можно записать в матричном виде:
$$
AX={mathcal B} .
$$
Любое решение $ x_1=alpha_1,dots,x_n=alpha_n $ системы можно также записать в виде столбца:
$$
X=left( begin{array}{l} alpha_1 \ vdots \ alpha_n end{array} right) in mathbb A^n .
$$
Матрица, составленная из всех коэффициентов системы уравнений:
$$
[A mid mathcal B ]=
left(
begin{array}{rrrrr}
a_{11} & a_{12} & dots & a_{1n} & b_1 \
a_{21} & a_{22} & dots & a_{2n} & b_2 \
dots &&& & dots \
a_{m1} & a_{m2} & dots & a_{mn} & b_m
end{array}
right)_{mtimes (n+1)} ,
$$
т.е. конкатенацией матрицы $ A_{} $ и столбца правых частей $ {mathcal B}_{} $ называется расширенной матрицей системы л.у.
Исключение переменных (метод Гаусса)
Идея
метода достаточно проста.
П
Пример. Решить систему уравнений
$$
left{
begin{array}{rrrr}
2x_1&-3x_2&-x_3&=3 \
4x_1&-3x_2&-5x_3&=6 \
3x_1&+5x_2&+9x_3&=-8
end{array}
right.
$$
Решение. Выразим из первого уравнения $ x_{1} $
$$ x_1=frac{3}{2} x_2+frac{1}{2} x_3 + frac{3}{2} $$
и подставим в оставшиеся уравнения
$$ 4 left(frac{3}{2} x_2+frac{1}{2} x_3 + frac{3}{2}right) -3,x_2-5,x_3=6 {color{Red} iff } 3x_2-3x_3 = 0
$$
$$
{color{Red} iff } x_2-x_3=0 ;
$$
$$ 3 left(frac{3}{2} x_2+frac{1}{2} x_3 + frac{3}{2}right) +5x_2+9x_3=-8 {color{Red} iff } frac{19}{2} x_2 +frac{21}{2}x_3=-frac{25}{2}
$$
$$
{color{Red} iff } 19x_2 +21x_3=-25 .
$$
Два получившихся уравнения не зависят от неизвестной $ x_{1} $ — она оказалась исключенной из этих
уравнений. Иными словами, мы получили новую подсистему уравнений
$$
left{
begin{array}{rrl}
x_2&-x_3&=0 \
19x_2&+21x_3&=-25,
end{array}
right.
$$
которой должны удовлетворять неизвестные $ x_{2} $ и $ x_{3} $. Продолжаем действовать по аналогии:
выразим из первого уравнения $ x_{2} $ через $ x_{3} $:
$$x_2=x_3 $$
и подставим во второе:
$$ 40 x_3 =-25 {color{Red} iff } x_3=-frac{5}{8} . $$
Итак, значение одной компоненты решения получено. Для нахождения оставшихся подставим значение
$ x_{3} $ в полученные по ходу решения соотношения:
$$
x_2=x_3=-frac{5}{8} {color{Red} Rightarrow } x_1=frac{3}{2} x_2+frac{1}{2} x_3 + frac{3}{2}=frac{1}{4} .
$$
Ответ. $ x_{1}=1/4, x_2=-5/8, x_3=-5/8 $.
Теперь осталось формализовать изложенную идею метода (сформулировав допустимые правила действия над уравнениями —
те, что в принципе, очевидны из здравого смысла ), а также исследовать возможные последствия его применения к системам общего вида.
Исключение переменных
Элементарными преобразованиями системы л.у. называются преобразования следующих трех типов:
1.
перестановка двух уравнений;
2.
умножение обеих частей уравнения на любое отличное от нуля число;
3.
прибавление к одному уравнению любого другого, умноженного на произвольное число: пара уравнений
$$
begin{array}{lcl}
a_{j1}x_1 +a_{j2}x_2+ ldots+a_{jn}x_n &=&b_j,\
a_{k1}x_1 +a_{k2}x_2+ ldots+a_{kn}x_n &=&b_k
end{array}
$$
заменяется парой
$$
begin{array}{rrrrcr}
(a_{j1}+ {color{RubineRed} lambda } a_{k1}) x_1 &+ (a_{j2}+ {color{RubineRed} lambda } a_{k2}) x_2 &+
ldots &+ (a_{jn}+ {color{RubineRed} lambda } a_{kn}) x_n &=&b_j + {color{RubineRed} lambda } b_k, , \
a_{k1}x_1 &+a_{k2}x_2&+ ldots &+a_{kn}x_n &=&b_k , .
end{array}
$$
Т
Теорема. Любое элементарное преобразование системы л.у. переводит эту систему в ей эквивалентную, т.е. имеющую то же множество решений, что и исходная.
Задача. С помощью элементарных преобразований привести систему
л.у. к наиболее простому виду: такому, из которого легко было
бы установить множество решений.
Предположим, что первое уравнение системы содержит явно неизвестную $ x_{1} $, т.е. $ a_{11}^{} ne 0 $. Исключим эту неизвестную из всех оставшихся уравнений. С этой целью вычтем из второго уравнения первое, домноженное на $ a_{21}/a_{11}^{} $. Получим
$$left(a_{22}- frac{a_{21}}{a_{11}} a_{12} right)x_2 + dots +
left(a_{2n}- frac{a_{21}}{a_{11}} a_{1n} right)x_n =
b_2 – frac{a_{21}}{a_{11}} b_1 , $$
Аналогичное преобразование — вычитание из третьего уравнения системы первого,
умноженного на $ a_{31}/a_{11}^{} $, позволяет исключить $ x_{1} $ из этого
уравнения, т.е. заменить его на
$$left(a_{32}- frac{a_{31}}{a_{11}} a_{12} right)x_2 + dots +
left(a_{3n}- frac{a_{31}}{a_{11}} a_{1n} right)x_n =
b_3 – frac{a_{31}}{a_{11}} b_1 . $$
Продолжаем процесс далее. В конечном итоге исключаем $ x_{1} $ из всех уравнений
кроме первого:
$$
left{
begin{array}{lllll}
a_{11}x_1 &+a_{12}x_2&+ ldots&+a_{1n}x_n &=b_1,\
&a_{22}^{[1]}x_2&+ ldots&+a_{2n}^{[1]}x_n &=b_2^{[1]},\
&dots & & & dots \
&a_{m2}^{[1]}x_2&+ ldots&+a_{mn}^{[1]}x_n &=b_m^{[1]}.
end{array} right.
npu
begin{array}{lcr}
a_{jk}^{[1]} &= & displaystyle a_{jk} – frac{a_{j1}a_{1k}}{a_{11}} ,\
b_j^{[1]} &= & displaystyle b_j – frac{a_{j1}b_1}{a_{11}} .
end{array}
$$
Полученная система эквивалентна исходной системе, однако она
имеет более простой вид: в ней выделилась подсиcтема
$$
left{
begin{array}{llll}
a_{22}^{[1]}x_2&+ ldots&+a_{2n}^{[1]}x_n &=b_2^{[1]},\
dots & & & dots \
a_{m2}^{[1]}x_2&+ ldots&+a_{mn}^{[1]}x_n &=b_m^{[1]},
end{array} right.
$$
которая не зависит от переменной $ x_{1} $. К этой новой подсистеме можно
применить те же рассуждения, что и к исходной системе,
поставив теперь целью исключение переменной $ x_{2} $.
Понятно, что процесс исключения может быть продолжен и далее. Теперь посмотрим,
где он может прерваться. Может так случиться, что очередная, $ ell_{} $-я
подсистема имеет коэффициент $ a_{ell ell}^{[ell-1]} $ равным нулю, что
не позволит алгоритму идти дальше — т.е. исключить переменную $ x_{ell}^{} $
из оставшихся уравнений (в принципе, такое могло случиться уже на первом
шаге, если бы коэффициент $ a_{11}^{} $ был бы равен нулю). Возможные варианты
дальнейших действий:
1.
если хотя бы один коэффициент при $ x_{ell}^{} $ в одном из оставшихся уравнений отличен от нуля: $ a_{j ell}^{[ell-1]}ne 0^{} $, то это уравнение переставляется с $ ell_{} $-м;
2.
если при всех $ jge ell^{} $ коэффициенты $ a_{j ell}^{[ell-1]} $ равны нулю, то переменная $ x_{ell}^{} $ не входит ни в одно оставшееся уравнение, и можно перейти к исключению переменной $ x_{ell+1}^{} $.
Поскольку число переменных конечно, то алгоритм исключения должен завершиться
за конечное число шагов. Чем он может завершиться? Окончательная система
должна иметь вид:
$$
left{
begin{array}{llllllrl}
a_{11}x_1 +&a_{12}x_2&+ ldots& +a_{1 {mathfrak r}}x_{mathfrak r}&
+a_{1 ,{mathfrak r} +1}x_{{mathfrak r}+1}&+ ldots + & a_{1n}x_n &=b_1,\
&a_{22}^{[1]}x_2&+ ldots& +a_{2 {mathfrak r}}^{[1]} x_{mathfrak r}&
+a_{2 ,{mathfrak r}+1}^{[1]} x_{{mathfrak r}+1}&+ ldots + & a_{2n}^{[1]} x_n &=b_2^{[1]},\
& & ddots & & & & & dots \
& & & a_{{mathfrak r} {mathfrak r}}^{[{mathfrak r}-1]}x_{mathfrak r} &
+ a_{{mathfrak r} ,{mathfrak r} +1}^{[{mathfrak r}-1]}x_{{mathfrak r}+1}& + ldots + &
a_{{mathfrak r} ,n}^{[{mathfrak r}-1]}x_n &=b_{mathfrak r}^{[{mathfrak r}-1]}, \
& & & & & & 0 &=b_{{mathfrak r}+1}^{[{mathfrak r}-1]}, \
& & & & & & dots & \
& & & & & & 0 &=b_{m}^{[{mathfrak r}-1]}, \
end{array} right.
$$
при $ {mathfrak r}le n_{} $. Заметим, что все коэффициенты этой системы будут
принадлежать тому же множеству, что и коэффициенты исходной
системы.
Предположение
. Мы будем считать, что каждое из первых $ {mathfrak r}_{} $ уравнений системы содержит в своей левой части хотя бы одну переменную с ненулевым коэффициентом.
Процесс получения системы такого вида из исходной системы уравнений называется прямым ходом метода Гаусса.
И
Исторический комментарий о Гауссе
☞
ЗДЕСЬ.
Установление множества решений
Т
Теорема. Если хотя бы одно из чисел
$ b_{{mathfrak r}+1}^{[{mathfrak r}-1]},dots , b_{m}^{[{mathfrak r}-1]} $
отлично от нуля, то исходная система линейных уравнений будет несовместной.
Для простоты мы будем иллюстрировать наши рассуждения на системах л.у.
над $ mathbb R_{} $, в этом же множестве искать решения.
Каждое из преобразований метода Гаусса будем обозначать $ to_{} $.
П
Пример. Решить систему л.у.
$$
left{
begin{array}{rrrr}
x_1&+x_2&-3, x_3 =& -1 \
2,x_1&+x_2&-2, x_3 =& 1 \
x_1&+x_2&+ x_3 =& 3 \
x_1&+2,x_2&-3, x_3 =& 1.
end{array}
right.
$$
Решение.
$$
to
left{
begin{array}{rrrr}
x_1&+x_2&-3, x_3 =& -1 \
&-x_2&+4, x_3 =& 3 \
&&4, x_3 =& 4 \
&x_2&=& 2
end{array}
right.
to
left{
begin{array}{rrrr}
x_1&+x_2&-3, x_3 =& -1 \
&-x_2&+4, x_3 =& 3 \
&&4, x_3 =& 4 \
&&4, x_3=& 5
end{array}
right.
to
$$
$$
to
left{
begin{array}{rrrr}
x_1&+x_2&-3, x_3 =& -1 \
&-x_2&+4, x_3 =& 3 \
&&4, x_3 =& 4 \
&&0=& 1
end{array}
right.
$$
Последнее равенство абсолютно противоречиво.
Ответ. Система несовместна.
Пусть теперь $ b_{{mathfrak r}+1}^{[{mathfrak r}-1]}=0,{}dots, b_{m}^{[{mathfrak r}-1]}=0 $.
Возможны два случая: $ {mathfrak r}=n_{} $ и $ {mathfrak r}<n_{} $.
В случае $ {mathfrak r}=n_{} $ перепишем систему:
$$
left{
begin{array}{llllrl}
a_{11}x_1 +&a_{12}x_2&+ ldots& +a_{1,n-1}x_{n-1} &+a_{1, n}x_{n}&=b_1,\
&a_{22}^{[1]}x_2&+ ldots& +a_{2,n-1}^{[1]} x_{n-1}& +a_{2, n}^{[1]} x_{n}&=b_2^{[1]},\
& dots & & & dots & \
& & & a_{n-1,n-1}^{[n-2]}x_{n-1} &+a_{n-1, n}^{[n-2]}x_{n} &=b_{n-1}^{[n-2]},\
&&&& a_{nn}^{[n-1]} x_n &=b_n^{[n-1]}.
end{array} right.
$$
На основании
предположения
, имеем $ a_{nn}^{[n-1]} ne 0 $.
Но тогда, поскольку система является конечной
стадией прямого хода метода Гаусса, то
и все коэффициенты $ a_{n-1,n-1}^{[n-2]}, dots, a_{22}^{[1]}, a_{11} $
должны быть отличны от нуля — в противном случае метод Гаусса не остановился
бы на системе такого вида; он называется треугольным:
Из последнего уравнения системы можно однозначно установить
значение $ x_{n} $:
$$x_n=b_n^{[n-1]} big/ a_{nn}^{[n-1]} .$$
Далее, подставляя это значение в $ (n-1) $-е уравнение системы,
выражаем $ x_{n-1} $:
$$ x_{n-1}= frac{b_{n-1}^{[n-2]} – a_{n-1, n}^{[n-2]}x_{n}}{
a_{n-1,n-1}^{[n-2]}}= frac{ b_{n-1}^{[n-2]} –
a_{n-1, n}^{[n-2]} b_n^{[n-1]} Big/ a_{nn}^{[n-1]}}{
a_{n-1,n-1}^{[n-2]}} .
$$
Подставляем полученные значения для $ x_{n} $ и $ x_{n-1} $
в $ (n-2)_{} $-е уравнение системы, выражаем $ x_{n-2} $, и т.д.,
в конце концов приходим к первому уравнению, из которого выражаем $ x_{1} $
если ранее уже получены выражения для $ x_2,dots,x_{n} $.
Т
Теорема. Если прямой ход метода Гаусса заканчивается треугольной системой, т.е.
$ mathfrak r = n_{} $ и $ b_{{mathfrak r}+1}^{[{mathfrak r}-1]}=0,{}dots, b_{m}^{[{mathfrak r}-1]}=0 $, то исходная система линейных уравнений имеет единственное решение.
П
Пример. Решить систему л.у.
$$
left{
begin{array}{rrrr}
x_1&+3,x_2&+ x_3 =&5 \
2,x_1&+x_2&+ x_3 =& 2 \
x_1&+x_2&+ 5,x_3 =& -7 \
2,x_1&+3,x_2&-3, x_3 =& 14.
end{array}
right.
$$
Решение.
$$
to
left{
begin{array}{rrrr}
x_1&+3,x_2&+ x_3 =&5 \
&-5,x_2&- x_3 =& -8 \
&-2,x_2&+4, x_3 =& -12 \
&-3,x_2&-5, x_3 =& 4
end{array}
right.
to
left{
begin{array}{rrrr}
x_1&+3,x_2&+ x_3 =&5 \
&-5,x_2&- x_3 =& -8 \
&&22/5, x_3 =& -44/5 \
&&-22/5, x_3 =& 44/5 \
end{array}
right.
to
$$
$$
to
left{
begin{array}{rrrr}
x_1&+3,x_2&+ x_3 =&5 \
&-5,x_2&- x_3 =& -8 \
&&22/5, x_3 =& -44/5 \
&&0=& 0
end{array}
right.
$$
Из третьего уравнения определяем $ x_{3}=-2 $, подставляем во второе: $ x_{2}=2 $;
оба значения подставляем в первое: $ x_{1}=1 $.
Ответ. $ x_1=1,, x_{2}=2,, x_3=-2 $ .
Исследуем теперь случай $ {mathfrak r}<n_{} $, соответствующая форма системы называется трапециевидной или ступенчатой1):
На основании
предположения
, в $ {mathfrak r} $-м уравнении этой системы
имеется хотя бы один ненулевой коэффициент в левой части,
пусть $ a_{{mathfrak r} {mathfrak s}}^{[{mathfrak r}-1]}ne 0 $ — первый из них.
Если $ {mathfrak s}=n $, то из этого уравнения однозначно определится $ x_{n} $
$$
x_n=alpha_n = b_{mathfrak r}^{[{mathfrak r}-1]} big/ a_{{mathfrak r} n}^{[{mathfrak r}-1]}
.
$$
Если же $ {mathfrak s}<n_{} $, то из того же уравнения можно выразить
$ x_{mathfrak s}^{} $ через переменные $ x_{{mathfrak s}+1},dots,x_{n} $:
$$
x_{mathfrak s}= left( b_{mathfrak r}^{[{mathfrak r}-1]}
– a_{{mathfrak r} ,{mathfrak s} +1}^{[{mathfrak r}-1]}x_{{mathfrak s}+1} – dots –
a_{{mathfrak r} ,n}^{[{mathfrak r}-1]}x_n
right) big/ a_{{mathfrak r} {mathfrak s}}^{[{mathfrak r}-1]} .
$$
Придавая в этой формуле переменным $ x_{{mathfrak s}+1},dots,x_{n} $ любой набор
значений из $ mathbb A_{} $:
$$x_{{mathfrak s}+1} =alpha_{{mathfrak s}+1}, dots, x_n=alpha_n , $$
мы получим соответствующее значение для $ x_{mathfrak s}^{} $:
$$x_{mathfrak s}=alpha_{{mathfrak s}} =
left( b_{mathfrak r}^{[{mathfrak r}-1]}
– a_{{mathfrak r} ,{mathfrak s} +1}^{[{mathfrak r}-1]}alpha_{{mathfrak s}+1} – dots –
a_{{mathfrak r} ,n}^{[{mathfrak r}-1]}alpha_n
right) big/ a_{{mathfrak r} {mathfrak s}}^{[{mathfrak r}-1]}
.
$$
Рассмотрим теперь $ ({mathfrak r}-1) $-е уравнение системы.
На основании все того же
предположения
,
в этом уравнении имеется хотя бы один ненулевой коэффициент в левой части;
пусть $ a_{{mathfrak r}-1, {mathfrak k}}^{[{mathfrak r}-2]}ne 0_{} $ — первый из них.
Поскольку мы преположили, что система является конечной
стадией прямого хода метода Гаусса, то $ {mathfrak k}<{mathfrak s} $, и
переменная $ x_{mathfrak k} $ будет выражаться через переменные
$ x_{{mathfrak k}+1},dots,x_{n} $.
Снова различаются два случая. Если $ {mathfrak k}={mathfrak s}-1 $,
то по фиксированным ранее значениям
$$ x_{mathfrak s}=alpha_{{mathfrak s}}, x_{{mathfrak s}+1} =alpha_{{mathfrak s}+1},
dots, x_n=alpha_n $$
значение переменной $ x_{mathfrak k} $ установится однозначно. Если же
$ {mathfrak k}<{mathfrak s}-1 $, то переменным
$ x_{{mathfrak k}+1},dots,x_{{mathfrak s}-1} $ могут быть приданы произвольные
значения:
$$x_{{mathfrak k}+1}=alpha_{{mathfrak k}+1},dots,
x_{{mathfrak s}-1} =alpha_{{mathfrak s}-1} ,
$$
по которым величина $ x_{mathfrak k}^{} $ установится однозначно. Произведем
подстановку всех полученных значений переменных в
$ ({mathfrak r}-2) $-е уравнение системы, и т.д. Во всей
этой схеме нам на каком-то шаге обязательно встретится уравнение,
в котором будут содержаться по крайней мере две переменные,
значения которых еще не были зафиксированы на предыдущих шагах. Это
следует из предположения, что число уравнений $ {mathfrak r}_{} $ меньше
числа неизвестных $ n_{} $. Такое уравнение допускает бесконечное число
решений, любое из которых в ходе дальнейших шагов может быть «доделано»
до решения системы.
Т
Теорема. Если прямой ход метода Гаусса заканчивается трапециевидной системой, т.е.
$ mathfrak r < n_{} $ и $ b_{{mathfrak r}+1}^{[{mathfrak r}-1]}=0,dots, b_{m}^{[{mathfrak r}-1]}=0 $, то исходная система л.у. имеет бесконечное множество решений.
Процесс получения решения исходной системы из ее треугольной или трапециевидной формы называется обратным ходом метода Гаусса.
П
Пример. Решить систему л.у.
$$ left{
begin{array}{rrrrr}
x_1&-2,x_2&+3, x_3&-4, x_4 =& 4, \
&x_2&-x_3&+x_4 =& -3, \
x_1&+3,x_2 & &-3, x_4 =& 1, \
&-7,x_2&+3, x_3&+x_4 =& -3.
end{array}
right.
$$
Решение.
$$
to
left{
begin{array}{rrrrr}
x_1&-2,x_2&+3, x_3&-4, x_4 =& 4 \
&x_2&-x_3&+x_4 =& -3 \
&5,x_2 &-3, x_3 &+ x_4 =& -3 \
&-7,x_2&+3, x_3&+x_4 =& -3
end{array}
right.
to
left{
begin{array}{rrrrr}
x_1&-2,x_2&+3, x_3&-4, x_4 =& 4 \
&x_2&-x_3&+x_4 =& -3 \
& &2, x_3 &-4, x_4 =& 12 \
&&-4, x_3&+8,x_4 =& -24
end{array}
right.
to
$$
$$
to left{
begin{array}{rrrrr}
x_1&-2,x_2&+3, x_3&-4, x_4 =& 4 \
&x_2&-x_3&+x_4 =& -3 \
& &2, x_3 &-4, x_4 =& 12 \
&&&0=&0
end{array}
right.
$$
Придавая $ x_{4} $ любые значения, из полученных уравнений последовательно
выразим $ x_{3},x_2 $ и $ x_{1} $.
Ответ. Система имеет бесконечное множество решений, которое может быть
представлено формулами:
$$ x_1=-8, x_2=3+t, x_3=6+2,t, x_4=t npu forall, t in mathbb{R} . $$
П
Пример. Решить систему л.у.
$$
left{
begin{array}{rrrrr}
x_1&-2,x_2&-2, x_3&- x_4 =& -2 \
2, x_1&-4, x_2&+3,x_3&-2,x_4 =& 3 \
3,x_1&-6,x_2 &+5,x_3 &-3, x_4 =& 5 \
4,x_1&-8,x_2&-3, x_3&-4,x_4 =& -3.
end{array}
right.
$$
Решение.
$$
to
left{
begin{array}{rrrrr}
x_1&-2,x_2&-2, x_3&- x_4 =& -2 \
&&7,x_3& =& 7 \
& &11, x_3 & =& 11 \
&&5, x_3& =& 5
end{array}
right.
to
$$
$$
to
left{
begin{array}{rrrrr}
x_1&-2,x_2&-2, x_3&- x_4 =& -2 \
&& x_3& =& 1 \
&& { } & & \
&& { } & &
end{array}
right.
$$
Второе уравнение дает единственное значение для $ x_3 $: $ x_3=1 $, подставив
которое в первое, получим выражение для $ x_1 $ через переменные $ x_2 $ и $ x_4 $:
$$x_1=2, x_2 +x_4 .$$
Придавая $ x_2 $ и $ x_4 $ любые значения из $ mathbb{R}_{} $, получим соответствующие
значения для $ x_1 $.
Ответ. Система имеет бесконечное множество решений, которое может быть
представлено формулами:
$$ x_1=2,t+u , x_2=t, x_3=1, x_4=u npu forall, {t,u} subset mathbb{R} . $$
Матричный формализм метода Гаусса
Применим метод Гаусса к системам уравнений общего вида (с символьными, т.е. буквенными коэффициентами) с целью получения общих формул решения. Ограничимся пока только случаем систем с числом уравнений равном числу неизвестных.
П
Пример. Решить систему уравнений
$$
left{
begin{array}{ll}
a_{11}x_1 +a_{12}x_2&=b_1,\
a_{21}x_1 +a_{22}x_2&=b_2.
end{array} right.
$$
Решение. Предположим, что $ a_{11}^{} ne 0 $. Тогда прямым ходом метода Гаусса систему уравнений можно привести к эквивалентной:
$$
left{
begin{array}{lrl}
a_{11}x_1 & +a_{12}x_2&=b_1,\
& & \
&left(a_{22}- frac{a_{21}}{a_{11}}a_{12}right)x_2&=b_2-frac{a_{21}}{a_{11}}b_1.
end{array} right.
$$
Если теперь выражение
$$ a_{11}a_{22}-a_{12}a_{21} $$
отлично от нуля, то последнее уравнение системы однозначно разрешимо относительно $ x_{2} $:
$$
x_2=frac{a_{11}b_2-a_{21}b_1}{a_{11}a_{22}-a_{12}a_{21}} .
$$
Подставляем найденное значение в первое уравнение, получаем:
$$
x_1=frac{a_{22}b_1-a_{12}b_2}{a_{11}a_{22}-a_{12}a_{21}} .
$$
Ответ. При условиях $ a_{11}ne 0, a_{11}a_{22}-a_{12}a_{21} ne 0 $ система имеет единственное решение, которое представимо в виде
$$
x_1=frac{a_{22}b_1-a_{12}b_2}{a_{11}a_{22}-a_{12}a_{21}},
x_2=frac{a_{11}b_2-a_{21}b_1}{a_{11}a_{22}-a_{12}a_{21}} .
$$
П
Пример. Решить систему уравнений:
$$
left{
begin{array}{rrrl}
a_{11}x_1 +&a_{12}x_2+&a_{13}x_3=&b_1 \
a_{21}x_1 +&a_{22}x_2+&a_{23}x_3=&b_2 \
a_{31}x_1 +&a_{32}x_2+&a_{33}x_3=&b_3.
end{array}
right.
$$
Решение. Начинаем действовать так же, как и в предыдущем примере. Пусть $ a_{11}^{} ne 0 $.
Тогда прямым ходом метода Гаусса исключаем из второго и третьего уравнений переменную $ x_{2} $:
$$
left{
begin{array}{rrrl}
a_{11}x_1 +&a_{12}x_2+&a_{13}x_3=&b_1 \
& & & \
&left(a_{22}- frac{a_{21}}{a_{11}}a_{12}right)x_2+&left(a_{23}- frac{a_{21}}{a_{11}}a_{13} right)x_3=&b_2 – b_1 frac{a_{21}}{a_{11}} \
& & & \
&left(a_{32}- frac{a_{31}}{a_{11}}a_{12} right)x_2+&left(a_{33} – frac{a_{31}}{a_{11}}a_{13} right)x_3=&b_3 – b_1 frac{a_{31}}{a_{11}}
end{array}
right.
$$
Коэффициент при $ x_{2} $ во втором уравнении был обозначен нами в предыдущем пункте через $ a_{22}^{[1]} $:
$$
a_{22}^{[1]}=frac{a_{11}a_{22}-a_{12}a_{21}}{a_{11}} .
$$
Если теперь $ a_{11}a_{22}-a_{12}a_{21}^{} ne 0 $, то можно исключить переменную $ x_{2} $ из последнего полученного уравнения:
$$
frac{a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23}}{a_{11}a_{22}-a_{12}a_{21}}, x_3=
$$
$$
=frac{a_{11}a_{22}b_{3}+a_{12}a_{31}b_2+a_{21}a_{32}b_1
-a_{31}a_{22}b_1 -a_{11}a_{32}b_{2} -a_{21}a_{12}b_3}{a_{11}a_{22}-a_{12}a_{21}} .
$$
Коэффициент при $ x_{3} $ в этом уравнении был обозначен в предыдущем пункте через $ a_{33}^{[2]} $. Если выражение
$$
a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23}
$$
отлично от нуля, то последнее уравнение системы однозначно разрешимо относительно $ x_{3} $:
$$
x_3=frac{a_{11}a_{22}b_{3}+a_{12}a_{31}b_2+a_{21}a_{32}b_1
-a_{31}a_{22}b_1 -a_{11}a_{32}b_{2} -a_{21}a_{12}b_3}{a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23}
} .
$$
Подставляем найденное значение в уравнение
$$
left(a_{22}- frac{a_{21}}{a_{11}}a_{12}right)x_2+left(a_{23}- frac{a_{21}}{a_{11}}a_{13} right)x_3=b_2 – b_1 frac{a_{21}}{a_{11}} ,
$$
получаем:
$$
x_2=frac{a_{11}a_{33}b_{2}+a_{21}a_{13}b_3+a_{31}a_{23}b_1
-a_{13}a_{31}b_2 -a_{11}a_{23}b_{3} -a_{21}a_{33}b_1}{a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23}
} .
$$
Наконец, подставляя найденные значения для $ x_{2} $ и $ x_{3} $ в первое уравнение системы, находим значение $ x_{1} $:
$$
x_1=frac{a_{22}a_{33}b_{1}+a_{12}a_{23}b_3+a_{32}a_{13}b_2
-a_{13}a_{22}b_3 -a_{32}a_{23}b_{1} -a_{12}a_{33}b_2}{a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23}
} .
$$
Ответ. При условиях
$$ a_{11}ne 0, a_{11}a_{22}-a_{12}a_{21} ne 0, $$
$$a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23} ne 0
$$
система имеет единственное решение.
Итак, мы получили общие формулы решения системы уравнений. Правда, мы разобрали пока только случай единственности решения. Условия существования единственного решения получились в виде набора неравенств на коэффициенты $ a_{jk}^{} $ системы. Оказывается, что не все эти неравенства являются существенными для единственности, можно доказать, что необходимым и достаточным в каждом примере является последнее полученное неравенство: для системы
$$
left{
begin{array}{ll}
a_{11}x_1 +a_{12}x_2&=b_1,\
a_{21}x_1 +a_{22}x_2&=b_2
end{array} right.
$$
условие единственности решения заключается в выполнении
$$a_{11}a_{22}-a_{12}a_{21} ne 0 , $$
а для системы
$$
left{
begin{array}{rrrl}
a_{11}x_1 +&a_{12}x_2+&a_{13}x_3=&b_1 \
a_{21}x_1 +&a_{22}x_2+&a_{23}x_3=&b_2 \
a_{31}x_1 +&a_{32}x_2+&a_{33}x_3=&b_3
end{array}
right.
$$
– в выполнении
$$a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{21}a_{32}a_{13}
-a_{31}a_{22}a_{13} -a_{21}a_{12}a_{33} -a_{11}a_{32}a_{23} ne 0 .
$$
Оба полученных выражения фактически являются функциями от элементов матрицы $ A_{} $ системы уравнений
$$
AX={mathcal B} ;
$$
эти функции имеют специальное название. Выражение
$$
det (A) = left|
begin{array}{cc}
a_{11} & a_{12} \
a_{21} & a_{22}
end{array}
right|=a_{11}a_{22}-a_{12}a_{21} ;
$$
называется определителем матрицы $ A_{} $ (второго порядка); а выражение
$$
det (A) =
left|
begin{array}{lll}
a_{11} & a_{12} & a_{13}\
a_{21} & a_{22} & a_{23} \
a_{31} & a_{32} & a_{33}
end{array}
right| =
$$
$$
=a_{11}a_{22}a_{33}+a_{12}a_{23} a_{31} +
a_{21}a_{32} a_{13} – a_{31} a_{22} a_{13} – a_{21}a_{12}a_{33} –
a_{11} a_{32} a_{23}
$$
— определителем2) матрицы $ A_{} $ (третьего порядка). Понятие определителя распространяется и на квадратные матрицы бóльших порядков;
образно говоря, определитель — это функция элементов матрицы, отвечающая за единственность решения системы уравнений.
Оказывается, что введенные функции позволяют и записать это решение в компактной форме. Так, полученные в двух предыдущих примерах ответы можно переписать — для $ n_{}=2 $:
$$
x_1 = frac{left|
begin{array}{cc}
b_{1} & a_{12} \
b_{2} & a_{22}
end{array}
right|}{left|
begin{array}{cc}
a_{11} & a_{12} \
a_{21} & a_{22}
end{array}
right|} , x_2=
frac{left|
begin{array}{cc}
a_{11} & b_{1} \
a_{21} & b_{2}
end{array}
right|}{left|
begin{array}{cc}
a_{11} & a_{12} \
a_{21} & a_{22}
end{array}
right|} ;
$$
а для $ n_{}=3 $:
$$
x_1=frac{left|
begin{array}{lll}
b_{1} & a_{12} & a_{13}\
b_{2} & a_{22} & a_{23} \
b_{3} & a_{32} & a_{33}
end{array}
right|}{left|
begin{array}{lll}
a_{11} & a_{12} & a_{13}\
a_{21} & a_{22} & a_{23} \
a_{31} & a_{32} & a_{33}
end{array}
right|} ,
x_2=frac{left|
begin{array}{lll}
a_{11} & b_{1} & a_{13}\
a_{21} & b_{2} & a_{23} \
a_{31} & b_{3} & a_{33}
end{array}
right|}{left|
begin{array}{lll}
a_{11} & a_{12} & a_{13}\
a_{21} & a_{22} & a_{23} \
a_{31} & a_{32} & a_{33}
end{array}
right|} ,
x_3=frac{left|
begin{array}{lll}
a_{11} & a_{12} & b_{1} \
a_{21} & a_{22} & b_{2} \
a_{31} & a_{32} & b_{3}
end{array}
right|}{left|
begin{array}{lll}
a_{11} & a_{12} & a_{13}\
a_{21} & a_{22} & a_{23} \
a_{31} & a_{32} & a_{33}
end{array}
right|} .
$$
Эти формулы, равно как и их обобщение на случай систем уравнений с $ n_{} $ неизвестными, называются формулами Крамера.
§
Дальнейший матричный анализ метода Гаусса
☞
ЗДЕСЬ.
Формулы Крамера
Рассмотрим систему линейных уравнений с квадратной матрицей $ A_{} $, т.е. такую, у которой число уравнений совпадает с числом неизвестных.
Т
Теорема. Cистема
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&b_1\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&b_2\
ldots& & ldots \
a_{n1}x_1 +a_{n2}x_2+ldots+a_{nn}x_n &=&b_n
end{array}right.
$$
имеет единственное решение тогда и только тогда, когда определитель матрицы этой системы отличен от нуля:
$$
left|
begin{array}{rrrr}
a_{11} & a_{12} & dots & a_{1n} \
a_{21} & a_{22} & dots & a_{2n} \
dots &&& dots \
a_{n1} & a_{n2} & dots & a_{nn}
end{array}
right|
ne 0 .
$$
В этом случае решение можно вычислить по формулами Крамера3):
$$
x_k =frac{det left[ A_{[1]}|dots|A_{[k-1]}|{mathcal B}|A_{[k+1]}|dots|A_{[n]} right]}{det A} quad npu
quad kin { 1,dots,n } .
$$
Для получения значения $ x_{k} $ в числитель ставится определитель, получающийся из $ det A_{} $
заменой его $ k_{} $-го столбца на столбец правых частей ( здесь $ {} | $ означает конкатенацию).
Доказательство
☞
ЗДЕСЬ
П
Пример. Решить систему уравнений
$$
left{begin{array}{rrrrrr}
2x_1& +3x_2&+11x_3&+5x_4 &=& color{Red}2,\
x_1& +x_2&+5x_3&+2x_4 &=& color{Red}1 ,\
2x_1& +x_2&+3x_3&+2x_4 &=&color{Red}{-3},\
x_1& +x_2&+3x_3&+4x_4 &=&color{Red}{-3}.
end{array}right.
$$
Решение.
$$
x_1=frac{left|begin{array}{rrrr}
color{Red}2 & 3&11&5 \
color{Red}1 & 1&5&2 \
color{Red}{-3}& 1&3&2 \
color{Red}{-3} & 1&3&4
end{array}right|}
{left|begin{array}{rrrr}
2& 3&11&5 \
1& 1&5&2 \
2& 1&3&2 \
1& 1&3&4
end{array}right|}=frac{-28}{14}=-2,
x_2=frac{left|begin{array}{rrrr}
2& color{Red}2&11&5 \
1& color{Red}1&5&2 \
2& color{Red}{-3}&3&2 \
1& color{Red}{-3}&3&4
end{array}right|}
{left|begin{array}{rrrr}
2& 3&11&5 \
1& 1&5&2 \
2& 1&3&2 \
1& 1&3&4
end{array}right|}=frac{0}{14}=0, dots $$
Найдите оставшиеся компоненты решения.
♦
Формулы Крамера не представляют практического значения в случае систем с числовыми коэффициентами: вычислять по ним решения конкретных систем линейных уравнений неэффективно, поскольку они требуют вычисления $ (n+1)_{} $-го определителя порядка $ n_{} $, в то время как метод Гаусса фактически эквивалентен вычислению одного определителя порядка $ n_{} $. Тем не менее, теоретическое значение формул Крамера заключается в том, что они дают явное представление решения системы через ее коэффициенты. Например, с их помощью легко может быть доказан результат
=>
Решение системы линейных уравнений с квадратной матрицей $ A_{} $ является непрерывной функцией коэффициентов этой системы при условии, что $ det A_{} ne 0 $.
При фиксированной матрице $ A $ и вариации столбца $ mathcal B $ решение системы может меняться с разной скоростью в зависмости от «направления изменения» столбца $ mathcal B $. Отношение наибыстрейшей скорости изменения к самой медленной является характеристикой матрицы $ A $ известной под названием числа обусловленности матрицы.
Кроме того, формулы Крамера начинают конкурировать по вычислительной эффективности с методом Гаусса в случае систем, зависящих от параметра. Подробнее
☞
ЗДЕСЬ.
Еще один способ решения системы основан на построении обратной матрицы:
$$
AX={mathcal B} quad Rightarrow quad X=A^{-1}{mathcal B} .
$$
Этот способ малоэффективен при фиксированных числовых $ A_{} $ и $ {mathcal B}_{} $.
?
Найти достаточное условие существования общего решения систем уравнений:
$$ A_1 X = {mathcal B}_1 quad u quad A_2 Y = {mathcal B}_2 , $$
при квадратных матрицах $ A_1 $ и $ A_2 $ одинакового порядка.
Теорема Кронекера-Капелли
Матрица, получающаяся конкатенацией матрицы $ A_{} $ и столбца правых частей $ {mathcal B}_{} $
$$
[ A|{mathcal B} ] =
left(
begin{array}{rrrrl}
a_{11} & a_{12} & dots & a_{1n} & b_1 \
a_{21} & a_{22} & dots & a_{2n} & b_2 \
dots &&& & dots \
a_{m1} & a_{m2} & dots & a_{mn} & b_m
end{array}
right)_{mtimes (n+1)}
$$
называется расширенной матрицей системы линейных уравнений $ AX={mathcal B} $.
Т
Теорема [Кронекер, Капелли]. Система $ AX={mathcal B} $ совместна тогда и только тогда, когда ранг матрицы этой системы совпадает с рангом ее расширенной матрицы:
$$ operatorname{rank}, A = operatorname{rank}, [ A|{mathcal B} ] . $$
При выполнении этого условия, система имеет единственное решение, если число неизвестных $ n_{} $ совпадает с общим значением ранга $ mathfrak r_{} $, и бесконечное множество решений, если $ n_{} $ больше этого значения.
Доказательство необходимости. Пусть существует решение $ x_1=alpha_1,dots,x_n=alpha_n $ системы,
тогда $$alpha_1 A_{[1]}+dots+alpha_n A_{[n]}={mathcal B} ,$$
т.е. столбец $ {mathcal B} $ линейно выражается через столбцы $ A_{[1]},dots,A_{[n]} $.
Но тогда
$$ operatorname{rank} {A_{[1]},dots,A_{[n]}}=operatorname{rank} {A_{[1]},dots,A_{[n]},{mathcal B}} .$$
Следовательно $ operatorname{rank}, A = operatorname{rank}, [ A|{mathcal B} ] $.
Доказательство достаточности проводится в следующем пункте.
♦
Обозначение $ mathfrak r_{} $ для ранга матрицы $ A_{} $ соответствует по смыслу этому же обозначению в методе Гаусса: после приведения к трапециевидному (или треугольному) виду в системе л.у. должно остаться ровно $ mathfrak r_{} $ линейно независимых уравнений, явно содержащих неизвестные.
Это утверждение вытекает из способа вычисления ранга матрицы по методу элементарных преобразований.
П
Пример. Исследовать совместность системы уравнений
$$
left{ begin{array}{rrrrrcr}
{color{Red}{lambda}} x_1+&x_2+&x_3+&x_4&=&1, \
x_1+& {color{Red}{lambda}} x_2+&x_3+&x_4&=&1, \
x_1+&x_2+&{color{Red}{lambda}} x_3+&x_4&=&1, \
x_1+&x_2+&x_3+&{color{Red}{lambda}} x_4&=&1,
end{array}
right.
$$
в зависимости от значения параметра $ color{Red}{lambda} $.
Решение. В этом примере число уравнений совпадает с числом неизвестных. Это
обстоятельство несколько облегчает рассуждения. Обратимся к замечанию из предыдущего пункта:
система л.у. с числом уравнений, совпадающем с числом неизвестных, как правило, совместна.
Тогда попробуем установить условия, обеспечивающие противоположное свойство — несовместность.
Оно, фактически, единственно: за все отвечает определитель системы $ det A_{} $. Если он отличен от нуля — система совместна.
$$det A =
left| begin{array}{cccc}{color{Red}{lambda}} &1&1&1 \
1&{color{Red}{lambda}}&1&1 \
1&1&{color{Red}{lambda}}&1 \
1&1&1&{color{Red}{lambda}}
end{array}
right|=
left| begin{array}{cccc}
({color{Red}{lambda}}-1) &(1-{color{Red}{lambda}})&0&0 \
0&({color{Red}{lambda}}-1)&(1-{color{Red}{lambda}})&0 \
0&0&({color{Red}{lambda}}-1)&(1-{color{Red}{lambda}}) \
1&1&1&{color{Red}{lambda}}
end{array}
right|=
$$
$$
=({color{Red}{lambda}}-1)^3
left| begin{array}{rrrr}
1 &-1&0&0 \
0&1&-1&0 \
0&0&1&-1 \
1&1&1&{color{Red}{lambda}}
end{array}
right|=
$$
$$ =({color{Red}{lambda}}-1)^3({color{Red}{lambda}}+3), .$$
По теореме Крамера при $ {color{Red}{lambda}}ne 1 $ и при $ {color{Red}{lambda}}ne -3 $ решение системы единственно:
$$x_1=x_2=x_3=x_4=1/({color{Red}{lambda}}+3) .$$
Осталось исследовать критические случаи: $ {color{Red}{lambda}}=1_{} $ и $ {color{Red}{lambda}}= -3 $: определитель системы обращается в нуль, но система может оказаться совместной. Придется вычислять ранги, но, к счастью, уже числовых матриц (а не зависящих от параметра, как исходная!).
При $ {color{Red}{lambda}}= 1_{} $ имеем
$$
operatorname{rank} left( begin{array}{cccc}
1 &1&1&1 \
1&1&1&1 \
1&1&1&1 \
1&1&1&1
end{array}
right)= operatorname{rank}
left( begin{array}{ccccc}
1&1&1&1&1 \
1&1&1&1&1 \
1&1&1&1&1 \
1&1&1&1&1
end{array}
right)=1 ,
$$
и система совместна. Она эквивалентна единственному уравнению
$$x_1+x_2+x_3+x_4=1 ,$$
которое имеет бесконечно много решений.
При $ {color{Red}{lambda}}= -3 $:
$$
operatorname{rank} left( begin{array}{rrrr}
-3 &1&1&1 \
1&-3&1&1 \
1&1&-3&1 \
1&1&1&-3
end{array}
right)=3,quad
operatorname{rank} left( begin{array}{rrrrr}
-3 &1&1&1&1 \
1&-3&1&1&1 \
1&1&-3&1&1 \
1&1&1&-3&1
end{array}
right)=4
$$
и система несовместна.
Ответ. Система несовместна при $ {color{Red}{lambda}} = -3 $; она имеет бесконечное множество решений при $ {color{Red}{lambda}} = 1_{} $ и единственное решение при $ {color{Red}{lambda}} notin {-3,1} $.
Что можно сказать о совместности или несовместности случайным образом составленной системы из $ m_{} $ линейных уравнений относительно $ n_{} $ неизвестных? При $ m_{}<n $ система, как правило, совместна и имеет бесконечное множество решений. В самом деле, если выбрать минор порядка $ m_{} $ в матрице системы $ A_{} $, элементы которой считаются случайными, то этот минор будет «с вероятностью 1» отличен от нуля (см. рассуждения в предыдущем пункте о совместности системы л.у. при $ m=n_{} $). Таким образом, $ operatorname{rank}, (A) = m $, и автоматически получаем, что $ operatorname{rank} (A | mathcal B) = m $ (поскольку ранг не может больше количества строк матрицы).
Если же $ m>n_{} $ то такая переопределенная система, как правило, несовместна. Рассуждения для доказательства правдоподобия этого утверждения могут быть следующими. Выберем произвольным образом в рассматриваемой системе какую-то подсистему, состоящую из $ n_{} $ уравнений. Она, как правило, будет иметь единственное решение. Теперь составим другую подсистему, хотя бы одним уравнением отличающуюся от предыдущей (поскольку $ m>n_{} $ такое всегда можно сделать). Новая подсистема снова, как правило, будет иметь единственное решение. Однако решения этих двух подсистем будут, как правило, различными и, следовательно, сама основная система не будет иметь решения. В этом последнем случае переопределенной системы имеется, однако, важный исключительный, который рассмотрим
☟
НИЖЕ.
=>
Система однородных уравнений
$$
left{
begin{array}{lllll}
a_{11}x_1 &+a_{12}x_2&+ ldots&+a_{1n}x_n &=0,\
a_{21}x_1 &+a_{22}x_2&+ ldots&+a_{2n}x_n &=0,\
dots & & & dots & \
a_{n1}x_1 &+a_{n2}x_2&+ ldots&+a_{nn}x_n &=0
end{array} right.
$$
всегда совместна: она имеет тривиальное решение $ x_1=0,dots,x_n=0 $. Для того, чтобы у нее существовало еще и нетривиальное решение необходимо и достаточно, чтобы определитель ее матрицы был равен нулю.
П
Пример. Найти условие, при котором три точки плоскости с координатами $ (x_1,y_1), (x_2,y_2) $ и $ (x_3,y_{3}) $ лежат на одной прямой.
Решение. Будем искать уравнение прямой в виде $ ax+by+c=0 $ при неопределенных коэффициентах $ a,b,c_{} $. Если точки лежат на прямой, то получаем для определения этих коэффициентов систему линейных уравнений:
$$
left{ begin{array}{cc}
ax_1+by_1+c & =0\
ax_2+by_2+c & =0\
ax_3+by_3+c & =0
end{array} right.
$$
Получившаяся система является однородной, условие существования у нее нетривиального решения (т.е. набора $ (a,b,c)_{} $ при хотя бы одном из чисел отличном от нуля):
$$
left|begin{array}{ccc}
x_1 & y_1 & 1 \
x_2 & y_2 & 1 \
x_3 & y_3 & 1
end{array}
right|=0 .
$$
♦
?
Доказать, что для совместности системы
$$
left{
begin{array}{ccc}
a_{11}x_1+a_{12}x_2+a_{13}x_3 &=& b_1 \
a_{21}x_1+a_{22}x_2+a_{23}x_3 &=& b_2 \
a_{31}x_1+a_{32}x_2+a_{33}x_3 &=& b_3 \
a_{41}x_1+a_{42}x_2+a_{43}x_3 &=& b_4
end{array}
right.
$$
необходимо, чтобы было выполнено условие
$$
left|
begin{array}{cccc}
a_{11}&a_{12}& a_{13} & b_1 \
a_{21}&a_{22}& a_{23} & b_2 \
a_{31}&a_{32}& a_{33} & b_3 \
a_{41}&a_{42}& a_{43} & b_4
end{array}
right|=0 quad .
$$
Является ли это условие достаточным для совместности?
Понятие ранга матрицы и результат, известный в литературе как «теорема Кронекера–Капелли», были открыты несколькими независимыми исследователями. Первое доказательство этой теоремы принадлежит Ч.Л.Додсону, оно было напечатано им в 1867 г. в книге
An elementary treatise on determinants
в следующей формулировке.
Теорема. Для того чтобы система $ n_{} $ неоднородных уравнений была совместна, необходимо и достаточно, чтобы порядок наибольшего отличного от нуля минора был одинаков в расширенной и нерасширенной матрице системы.
?
Додсон — один из самых знаменитых математиков мира. Назовите его псевдоним. ![]()
Ответ
☞
ЗДЕСЬ
Общее решение
Пусть выполнено условие теоремы Кронекера-Капелли: $ operatorname{rank} (A)=operatorname{rank}[Amid mathcal B ] =mathfrak{r} $. По определению ранга матрицы,
в матрице $ A $ существует минор порядка $ mathfrak{r} $, отличный от нуля; этот
же минор останется и минором расширенной матрицы $ [ Amid mathcal B ] $. Пусть, для определенности, ненулевой минор находится в левом верхнем углу матрицы4):
$$
Delta = Aleft( begin{array}{llll}
1 & 2 & dots & mathfrak{r} \
1 & 2 & dots & mathfrak{r}
end{array}
right) = left|
begin{array}{llll}
a_{11} & a_{12} & dots & a_{1mathfrak{r}} \
a_{21} & a_{22} & dots & a_{2mathfrak{r}} \
dots &&& dots \
a_{mathfrak{r}1} & a_{mathfrak{r}2} & dots & a_{mathfrak{r} mathfrak{r}}
end{array}
right| ne 0 .
$$
Тогда первые $ mathfrak{r} $ строк матрицы $ A $ линейно независимы, а остальные будут линейно выражаться через них. Это же утверждение будет справедливо и для строк
матрицы $ [Amid mathcal B] $. Умножая первые $ mathfrak{r} $ уравнений системы на
соответствующие числа и складывая их, получим любое оставшееся уравнение.
Таким образом, система уравнений может быть заменена эквивалентной ей
системой из первых $ mathfrak{r} $ уравнений:
$$
left{ begin{array}{rrrr}
a_{11}x_1+dots+a_{1mathfrak{r}}x_{mathfrak{r}}&+a_{1,mathfrak{r}+1}x_{mathfrak{r}+1}+
dots +a_{1n}x_n&=&b_1, \
dots & & & dots \
a_{mathfrak{r}1}x_1+dots+a_{mathfrak{r}mathfrak{r}}x_{mathfrak{r}}&
+a_{mathfrak{r},mathfrak{r}+1}x_{mathfrak{r}+1}+dots
+a_{mathfrak{r}n}x_n&=&b_mathfrak{r}
end{array}
right.
quad iff quad A^{prime} X={mathcal B}^{prime}
$$
Если $ mathfrak{r}=n $, то матрица $ A^{prime} $ квадратная. По предположению
$ det A^{prime} ne 0 $. По теореме Крамера решение такой системы единственно.
Пусть теперь $ mathfrak{r}<n $. Перепишем получившиеся уравнения в виде
$$
left{ begin{array}{rrrr}
a_{11}x_1+dots+a_{1mathfrak{r}}x_{mathfrak{r}}&=&b_1-&
(a_{1,mathfrak{r}+1}x_{mathfrak{r}+1}+
dots +a_{1n}x_n), \
dots & & & \
a_{mathfrak{r}1}x_1+dots+a_{mathfrak{r}mathfrak{r}}x_{mathfrak{r}}
&=&b_mathfrak{r}-&(a_{mathfrak{r},mathfrak{r}+1}x_{mathfrak{r}+1}+dots +a_{mathfrak{r}n}x_n).
end{array}
right.
$$
По предположению, определитель матрицы, составленной из коэффициентов при $ x_1,dots,x_{mathfrak{r}} $, отличен от нуля. По теореме Крамера у этой системы
существует единственное решение относительно неизвестных
$ x_1,dots,x_{mathfrak{r}} $ при произвольных фиксированных значениях
$ x_{mathfrak{r}+1},dots,x_n $:
$$
x_j=frac{
left| begin{array}{lllllll}
a_{11} & dots &a_{1,j-1} &left[ b_1-(a_{1,mathfrak{r}+1}x_{mathfrak{r}+1}+dots +a_{1n}x_n)
right]
&a_{1,j+1}& dots &a_{1mathfrak{r}} \
dots &&&dots&&& dots \
a_{mathfrak{r}1} & dots &a_{mathfrak{r},j-1} & left[ b_{mathfrak{r}}-
(a_{mathfrak{r},mathfrak{r}+1}x_{mathfrak{r}+1}+dots +a_{mathfrak{r}n}x_n)
right]
&a_{mathfrak{r},j+1}& dots &a_{mathfrak{r}mathfrak{r}}
end{array}
right|
}{Delta}
$$
$$
mbox{при} jin {1,dots, mathfrak{r}} .
$$
Таким образом, в этом случае
система имеет бесконечное множество решений. Используя свойство линейности
определителя по столбцу (см. свойство
5
☞
ЗДЕСЬ ), формулы можно переписать в виде
$$
x_j=beta_j + gamma_{j,mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{jn}x_n
npu jin {1,dots, mathfrak{r} } .
$$
Здесь
$$
beta_j =frac{1}{Delta}
left| begin{array}{lllllll}
a_{11} & dots &a_{1,j-1} & b_1 &a_{1,j+1}& dots &a_{1mathfrak{r}} \
vdots &&&vdots&&& vdots \
a_{mathfrak{r}1} & dots &a_{mathfrak{r},j-1} & b_{mathfrak{r}}
&a_{mathfrak{r},j+1}& dots &a_{mathfrak{r}mathfrak{r}}
end{array}
right|, ,
$$
$$
gamma_{jk} = -frac{1}{Delta}
left| begin{array}{lllllll}
a_{11} & dots &a_{1,j-1} & a_{1k} &a_{1,j+1}& dots &a_{1mathfrak{r}} \
vdots &&&vdots&&& vdots \
a_{mathfrak{r}1} & dots &a_{mathfrak{r},j-1} & a_{mathfrak{r}k}
&a_{mathfrak{r},j+1}& dots &a_{mathfrak{r}mathfrak{r}}
end{array}
right|
.
$$
Эти формулы называются общим решением системы $ A X=mathcal B $. Участвующие в них
переменные $ x_{mathfrak{r}+1},dots,x_n $ называются основными (или свободными), а
$ x_1,dots,x_{mathfrak{r}} $ — зависимыми. Решение, получающееся
из общего решения фиксированием значений основных переменных, называется
частным решением системы уравнений.
П
Пример. Исследовать совместность и найти общее решение системы уравнений:
$$
left{ begin{array}{rrrrrrcr}
{color{Red} 2}, x_1-&x_2+& {color{Red} 1}, x_3+&{color{Red} 2}, x_4+&3, x_5&=&2, \
{color{Red} 6} x_1-&3x_2+&{color{Red} 2}, x_3+&{color{Red} 4}, x_4+&5x_5&=&3, \
6x_1-&3x_2+&4x_3+&8x_4+&13x_5&=&9, \
{color{Red} 4} x_1-&2x_2+&{color{Red} 1}, x_3+&{color{Red} 1}, x_4+&2x_5&=&1.
end{array}
right.
$$
Решение проведем двумя способами, соответствующими двум способам вычисления ранга матрицы. Вычисляем сначала ранг матрицы $ A $ по методу окаймляющих миноров:
$$
|2| ne 0,quad left| begin{array}{rr} 2 & 1 \ 6 & 2 end{array} right| ne 0,
quad left| begin{array}{rrr} 2 & 1 & 2 \ 6 & 2 & 4 \ 4 & 1 & 1 end{array} right|=2 ne 0
,
$$
а все миноры, окаймляющие последний, равны нулю. Итак, $ operatorname{rank} (A) =3 $.
Для нахождения ранга расширенной матрицы $ [Amid mathcal B] $ достаточно проверить
окаймление найденного ненулевого минора третьего порядка с помощью
элементов взятых из столбца правых частей. Имеется всего один такой минор,
и он равен нулю. Следовательно $ operatorname{rank}[ Amid mathcal B ] =3 $, система совместна, и имеет бесконечное множество решений.
Ненулевой минор третьего порядка (базисный минор) находится в первой, второй и четвертых строках,
что означает линейную независимость соответствующих уравнений. Третье уравнение
линейно зависит от остальных, и может быть отброшено. Далее, указанный
базисный минор образован коэффициентами при $ x_1,x_3 $ и $ x_4 $.
Следовательно оставшиеся уравнения могут быть разрешены
относительно этих переменных, т.е. они — зависимые, а $ x_2 $ и $ x_5 $ —
основные. Использование формулы дает общее решение
$$
begin{array}{lll}
x_1&=&frac{left| begin{array}{rrr} 2 & 1 & 2 \ 3 & 2 & 4 \ 1 & 1 & 1
end{array}
right|}{displaystyle 2}
-x_2frac{left| begin{array}{rrr} -1 & 1 & 2 \ -3 & 2 & 4 \ -2 & 1 & 1
end{array}
right|}{displaystyle 2}
-x_5frac{left| begin{array}{rrr} 3 & 1 & 2 \ 5 & 2 & 4 \ 2 & 1 & 1
end{array}
right|}{displaystyle 2}
=-frac{1}{2}+frac{1}{2}x_2+frac{1}{2}x_5, \
& & \
x_3&=&frac{left| begin{array}{rrr} 2 & 2 & 2 \ 6 & 3 & 4 \ 4 & 1 & 1
end{array}
right|}{displaystyle 2}
-x_2frac{left| begin{array}{rrr} 2 & -1 & 2 \ 6 & -3 & 4 \ 4 & -2 & 1
end{array}
right|}{displaystyle 2}
-x_5frac{left| begin{array}{rrr} 2 & 3 & 2 \ 6 & 5 & 4 \ 4 & 2 & 1
end{array}
right|}{displaystyle 2}=3-4x_5, \
& & \
x_4 &=&frac{left| begin{array}{rrr} 2 & 1 & 2 \ 6 & 2 & 3 \ 4 & 1 & 1
end{array}
right|}{displaystyle 2}
-x_2frac{left| begin{array}{rrr} 2 & 1 & -1 \ 6 & 2 & -3 \ 4 & 1 & -2
end{array}
right|}{displaystyle 2}
-x_5frac{left| begin{array}{rrr} 2 & 1 & 3 \ 6 & 2 & 5 \ 4 & 1 & 2
end{array}
right|}{displaystyle 2}
= 0.
end{array}
$$
Решим теперь ту же задачу, воспользовавшись методом Гаусса исключения переменных в системе линейных уравнений:
$$
left{ begin{array}{rrrrrrcr}
2x_1&-x_2&+x_3&+2x_4&+3x_5&=&2, \
&&x_3&+2x_4&+4x_5&=&3, \
&&&x_4&&=&0
end{array}
right.
$$
Используя обратный ход метода Гаусса, снова приходим к полученным формулам.
Ответ. Общее решение системы:
$ x_1=1/2 (x_2+x_5-1), x_3=3-4,x_5, x_4=0 $.
Проанализируем теперь полученные общие формулы для общего решения. В этих формулах $ beta_j $ представляет решение системы, получаемое при $ x_{mathfrak{r}+1}=0,dots,x_n=0 $.
Величины же коэффициентов $ gamma_{jk} $ вовсе не зависят от правых частей системы и будут одинаковыми при любых значениях $ b_1,dots,b_m $. В частности, если
$ b_1=0,dots,b_m=0 $, то в формулах величины $ beta_j $ обращаются в нуль и эти формулы превращаются в
$$
x_j=gamma_{j,mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{jn}x_n
npu jin {1,dots, mathfrak{r}} .
$$
Вывод. Формула общего решения системы $ A X=mathcal B $:
$$
x_j=beta_j + gamma_{j,mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{jn}x_n
npu jin {1,dots, mathfrak{r} }
$$
состоит из двух частей: слагаемые, не содержащие свободных переменных, определяют частное решение неоднородной системы:
$$ x_1= beta_1,dots, x_{mathfrak{r}}= beta_{mathfrak{r}},x_{mathfrak{r}+1}=0,dots,x_n=0 ; $$
оставшиеся после их отбрасывания формулы задают общее решение системы $ AX=mathbb O $. Этот результат обобщается в следующей теореме.
Т
Теорема. Общее решение системы уравнений $ A X=mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=mathbb O $.
Доказательство тривиально если система $ A X=mathcal B $ имеет единственное решение. Если же решений бесконечно много, то выбрав какое-то одно частное $ X=X_1 $ мы получаем, что любое другое частное решение $ X=X_2 $ должно быть связано с первым соотношением
$$ A(X_2-X_1)=mathbb O , $$
т.е. разность частных решений неоднородной системы обязательно является решением однородной системы уравнений $ AX=mathbb O $.
♦
Теперь посмотрим как можно описать общее решение однородной системы.
Система однородных уравнений
Система линейных уравнений называется однородной, если все коэффициенты правых частей равны нулю:
$$
left{
begin{array}{lllll}
a_{11}x_1 &+a_{12}x_2&+ ldots&+a_{1n}x_n &=0,\
a_{21}x_1 &+a_{22}x_2&+ ldots&+a_{2n}x_n &=0,\
dots & & & dots & \
a_{m1}x_1 &+a_{m2}x_2&+ ldots&+a_{mn}x_n &=0.
end{array} right.
$$
или, в матричном виде:
$$
A_{mtimes n}X={mathbb O}_{mtimes 1}
$$
Однородная система всегда совместна: она имеет тривиальное решение:
$ x_{1}=0,dots,x_n=0 $.
Задача ставится о поиске нетривиального решения. Оно не всегда существует. Так, к примеру,
если матрица $ A_{} $ системы — квадратная и имеет ненулевой определитель, то, согласно теореме Крамера, нетривиальных решений у однородной системы нет.
Теорема Кронекера-Капелли утверждает, что условие $ det (A_{}) = 0 $ является и достаточным для существования нетривиального решения.
Т
Теорема 1. Для того, чтобы система однородных уравнений с квадратной матрицей $ A_{} $ имела нетривиальное решение необходимо и достаточно, чтобы $ det (A_{}) = 0 $.
Для произвольной (не обязательно квадратной) матрицы $ A_{} $ имеет место следующий общий результат.
Т
Теорема 2. Если $ operatorname{rank} (A)=mathfrak r < n $ то у системы однородных уравнений имеется набор (система) из $ n- mathfrak r_{} $ решений
$$ X=X_1,dots, X=X_{n-mathfrak r} , $$
при линейно независимых столбцах $ {X_1,dots,X_{n-mathfrak r}} subset mathbb A^n $. Любое другое решение $ X= X_{*} $ системы линейно выражается через указанные столбцы:
$$ X_{*}=alpha_1X_1+dots+ alpha_{n-mathfrak r}X_{n-mathfrak r} . $$
Этот набор решений называется фундаментальной системой решений (ФСР) для системы однородных уравнений. Число $ n- mathfrak r $ иногда называется дефектом матрицы5) $ A_{mtimes n}^{} $.
=>
Если $ m<n_{} $, то система однородных уравнений имеет нетривиальное решение.
Определение вместе с предшествующей ему теоремой можно переписать в терминах теории линейных пространств6)
Т
Теорема 3. Множество решений системы однородных уравнений образует линейное подпространство пространства $ mathbb A^{n} $. Размерность этого подпространства равна $ n-mathfrak r $, а фундаментальная система решений образует его базис.
?
Пусть матрица системы $ AX=mathbb O $ квадратная и
$$ operatorname{rank} (A) =n_{}-1 , .$$
Доказать, что если ненулевой минор матрицы порядка $ n_{}-1 $
соответствует какому-нибудь элементу $ j_{} $-й строки, то система алгебраических
дополнений к элементам $ a_{j1},dots,a_{jn}^{} $ этой строки составляет ФСР для $ AX=mathbb O_{} $.
Например, для системы
$$
left{
begin{array}{ll}
a_{11}x_1 +a_{12}x_2+a_{13}x_3&=0,\
a_{21}x_1 +a_{22}x_2+a_{23}x_3&=0
end{array} right.
$$
ФСР состоит из решения
$$
x_1=left|
begin{array}{ll}
a_{12} & a_{13} \
a_{22} & a_{23}
end{array}
right| ,
x_2=-left|
begin{array}{ll}
a_{11} & a_{13} \
a_{21} & a_{23}
end{array}
right| ,
x_3=left|
begin{array}{ll}
a_{11} & a_{12} \
a_{21} & a_{22}
end{array}
right| ,
$$
если только хотя бы один из миноров отличен от нуля.
Теперь обсудим способы нахождения ФСР.
1.
Первый из них получается из общего метода решения системы линейных уравнений, рассмотренного в предыдущем пункте. Так же, как и в том пункте, сделаем упрощающее обозначения предположение, что зависимыми переменными являются первые $ x_{1},dots,x_{mathfrak r} $,
т.е. общее решение задается формулами
$$
x_j=gamma_{j,mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{jn}x_n
npu jin {1,dots, mathfrak{r}} .
$$
Иными словами, вектор столбец
$$
X=left(begin{array}{c}
gamma_{1,mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{1n}x_n \
gamma_{2,mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{2n}x_n \
vdots \
gamma_{mathfrak{r},mathfrak{r}+1}x_{mathfrak{r}+1}+dots+gamma_{mathfrak{r}n}x_n \
x_{mathfrak{r}+1} \
x_{mathfrak{r}+2} \
vdots \
x_{n}
end{array}right)
$$
будет решением однородной системы при любых наборах значений основных переменных $ x_{mathfrak{r}+1},dots,x_{n} $. Представим этот вектор в виде суммы векторов:
$$
=x_{mathfrak{r}+1} underbrace{
left(begin{array}{c}
gamma_{1,mathfrak{r}+1} \
gamma_{2,mathfrak{r}+1} \
vdots \
gamma_{mathfrak{r},mathfrak{r}+1} \
1 \
0 \
vdots \
0
end{array}right)}_{X_1} +
x_{mathfrak{r}+2}
underbrace{left(begin{array}{c}
gamma_{1,mathfrak{r}+2} \
gamma_{2,mathfrak{r}+2} \
vdots \
gamma_{mathfrak{r},mathfrak{r}+2} \
0 \
1 \
vdots \
0
end{array}right)}_{X_2}+dots+
x_{n}
underbrace{left(begin{array}{c}
gamma_{1n} \
gamma_{2n} \
vdots \
gamma_{mathfrak{r}n} \
0 \
0 \
vdots \
1
end{array}right)}_{X_{n-mathfrak r}} .
$$
Таким образом, любое решение однородной системы представимо в виде линейной комбинации $ n_{}- mathfrak r $ фиксированных решений. Именно эти решения и можно взять в качестве ФСР — их линейная независимость очевидна (единицы в нижних частях каждого вектора $ X_{j} $ расположены на разных местах, и ни какая линейная комбинация столбцов $ { X_1,dots,X_{n-mathfrak r} } $ не сможет обратить их одновременно в нуль).
Оформим этот способ построения ФСР в теорему:
Т
Теорема 4. Если система уравнений $ AX=mathbb O $ имеет структуру матрицы $ A_{} $ вида:
$$ A = left[ E_{mathfrak r} mid P_{mathfrak r times (n-mathfrak r)} right] , $$
то ее ФСР состоит из столбцов матрицы
$$ left[ begin{array}{r} – P^{top} \ hline E_{n-mathfrak r} end{array} right] . $$
Для одной и той же системы уравнений, фундаментальная система решений может быть построена разными способами и иметь разный вид. Как только мы смогли упростить систему линейных уравнений таким образом, чтобы выделить в ней основные и зависимые переменные, остается только зафиксировать несколько наборов значений для основных переменных.
$$
begin{array}{lll}
x_{{mathfrak r}+1}={mathbf x}_{1,{mathfrak r}+1} , & dots, &x_n={mathbf x}_{1n} \
dots & & dots \
x_{{mathfrak r}+1}={mathbf x}_{n-{mathfrak r},{mathfrak r}+1} , & dots, &
x_n={mathbf x}_{n-{mathfrak r},n}
end{array}
mbox{ чтобы }
det {mathbf D}= det
left[ begin{array}{lcl}
{mathbf x}_{1,{mathfrak r}+1} & dots & {mathbf x}_{1n} \
dots & & dots \
{mathbf x}_{n-{mathfrak r},{mathfrak r}+1} & dots & {mathbf x}_{n-{mathfrak r},n}
end{array}
right]
$$
был бы ненулевым.
Проще всего взять в качестве $ {mathbf D} $ единичную матрицу $ E_{n-{mathfrak r}} $, что и было сделано выше.
П
Пример. Найти ФСР для системы уравнений
$$
left{ begin{array}{rrrrcl}
x_1-&x_2+&x_3-&x_4&=&0, \
x_1-&x_2+&2x_3+&3x_4&=&0, \
x_1-&x_2-&x_3-&9x_4&=&0
end{array}
right.
$$
Решение. Приводим систему к трапециевидному виду:
$$
left{ begin{array}{rrrrl}
x_1-&x_2+&x_3-&x_4=&0, \
&&x_3+&4x_4=&0
end{array}
right.
$$
В качестве зависимых переменных можно взять, например, $ x_{1} $ и $ x_{3} $.
$$
begin{array}{cc|cc}
x_1 & x_3 & x_2 & x_4 \ hline
1 & 0 & 1 & 0 \
5 & -4 & 0 & 1
end{array}
$$
Ответ.7) $ { [1,1,0,0]^{top}, [5,0,-4,1]^{top} } $.
2.
Этот способ напоминает вычисление обратной матрицы методом приписывания единичной матрицы. Транспонируем матрицу $ A_{} $ системы и припишем к ней справа единичную матрицу порядка $ n_{} $:
$$
left[ A^{top} | E_n right] = left(begin{array}{llllccccc}
a_{11} & a_{21} & dots & a_{m1} & 1 & 0 & 0 & dots & 0 \
a_{12} & a_{22} & dots & a_{m2} & 0 & 1 & 0 & dots & 0 \
a_{13} & a_{23} & dots & a_{m3} & 0 & 0 & 1 & dots & 0 \
vdots & & & vdots & vdots & & & ddots & vdots \
a_{1n} & a_{2n} & dots & a_{mn} & 0 & 0 & 0 & dots & 1
end{array}
right)
;
$$
здесь $ {} |_{} {} $ означает конкатенацию. Получившуюся матрицу элементарными преобразованиями строк приводим к форме:
$$
left(
begin{array}{cc}
hat A & K \
mathbb O & L
end{array}
right)
=
left(begin{array}{cccccccc|ccccc}
color{Red}{star} & * & * & dots & * & * & * & * & * & * & * & dots & * \
0 & color{Red}{star} & * & dots & * & * & * & * & * & * & * & dots & * \
0 & 0 & color{Red}{star} & dots & * & * & * & * & * & * & * & dots & * \
vdots & & & ddots & & vdots & & & vdots & & & & vdots \
0 & 0 & dots & & 0 & color{Red}{star} & * & * & * & * & * & dots & * \
hline
0 & 0 & dots & 0 & 0 & 0 & 0 & 0 & Box & Box & Box & dots & Box \
vdots & & & & & vdots & & & vdots & & & & vdots \
0 & 0 & dots & 0 & 0 & 0 & 0 & 0 & Box & Box & Box & dots & Box
end{array}
right)
begin{array}{l}
left.begin{array}{l}
\ \ \ \ \
end{array}right} mathfrak r
\
left. begin{array}{l}
\ \ \
end{array}right} n – mathfrak r
end{array} .
$$
Элементы трапециевидной матрицы $ hat A $, обозначенные $ color{Red}{star} $, могут быть равны нулю, но $ operatorname{rank}(hat A)= mathfrak r_{} $. В этом случае строки матрицы $ L_{} $, образовавшейся в правом нижнем углу (ее элементы обозначены $ Box $), составляют ФСР для системы $ AX=mathbb O $.
П
Пример. Найти ФСР для системы уравнений
$$
left{
begin{array}{rrrrrrl}
x_1 &+2,x_2&+ x_3&+3,x_4&-x_5&+2,x_6=&0,\
-3x_1 &-x_2&+ 2,x_3&-4,x_4&+x_5&-x_6=&0,\
x_1 &+x_2&+ 3,x_3&+2,x_4&+x_5&+3,x_6=&0,\
-8,x_1 &-7,x_2&+ 4,x_3&-15,x_4&+6,x_5&-5,x_6=&0,\
6x_1 &+5,x_2& +5,x_3&+11,x_4 &&+9,x_6=&0.
end{array} right.
$$
Решение. Преобразуем матрицу $ left[ A^{top} | E_6 right] $
$$
left(begin{array}{rrrrr|rrrrrr}
1 & -3 & 1 & -8 & 6 & 1 \
2 & -1 & 1 & -7 & 5 & & 1 \
1 & 2 & 3 & 4 & 5 & & & 1 \
3 & -4 & 2 & -15 & 11 &&&& 1 \
-1 & 1 & 1 & 6 & 0 &&&&& 1 \
2 & -1 & 3 & -5 & 9 &&&&&& 1
end{array}
right)_{6times 11}
$$
к трапециевидной форме с помощью элементарных преобразований строк:
$$
rightarrow left(begin{array}{rrrrr|rrrrrr}
1 & -3 & 1 & -8 & 6 & 1 \
0 & 5 & -1 & 9 & -7 &-2 & 1 \
0 & 5 & 2 & 12 & -1 &-1 &0 & 1 \
0 & 5 & -1 & 9 & -7 &-3&0&0& 1 \
0 & -2 & 2 & -2 & 6 &1&0&0&0& 1 \
0 & 5 & 1 & 11 & -3 &-2&0&0&0&0& 1
end{array}
right)rightarrow
$$
$$
rightarrow left(begin{array}{rrrrr|rrrrrr}
1 & -3 & 1 & -8 & 6 & 1 \
0 & 5 & -1 & 9 & -7 &-2 & 1 \
0 & 0 & 3 & 3 & 6 &1 &-1 & 1 \
0 & 0 & 0 & 0 & 0 &-1&-1&0& 1 \
0 & 0 & 8/5 & 8/5 & 16/5 &1/5&2/5&0&0& 1 \
0 & 0 & 2 & 2 & 4 &0&-1&0&0&0& 1
end{array}
right)rightarrow
$$
$$
rightarrow left(begin{array}{rrrrr|rrrrrr}
1 & -3 & 1 & -8 & 6 & 1 \
0 & 5 & -1 & 9 & -7 &-2 & 1 \
0 & 0 & 3 & 3 & 6 &1 &-1 & 1 \
0 & 0 & 0 & 0 & 0 &-1&-1&0& 1 \
0 & 0 & 0 & 0 & 0 &-1/3&14/15&-8/15&0& 1 \
0 & 0 & 0 & 0 & 0 &-2/3&-1/3&-2/3&0& 0 & 1
end{array}
right)
$$
Ответ.8) $ { [-1,-1,0,1,0,0]^{top}, [-1/3,14/15,-8/15,0, 1,0]^{top},
[-2/3,-1/3,-2/3,0, 0, 1]^{top} } $.
§
Обоснование метода
☞
ЗДЕСЬ
3.
Еще один способ построения ФСР основан на теореме Гамильтона-Кэли.
Т
Теорема. Пусть матрица системы $ AX=mathbb O $ квадратная и
$ operatorname{rank} (A) ={mathfrak r} $. Тогда характеристический полином матрицы $ A_{} $ имеет вид:
$$ det(A-lambda E)=(-1)^nlambda^{n-mathfrak r}(lambda^{mathfrak r}
+a_1lambda^{{mathfrak r}-1}+dots+a_{n-mathfrak r} ) $$
и ненулевые столбцы матрицы
$$
A^{{mathfrak r}}+a_1A^{{mathfrak r}-1}+dots+a_{n-mathfrak r}E
$$
составляют ФСР для $ AX=mathbb O $.
П
Пример. Найти ФСР для системы уравнений
$$
left{
begin{array}{rrrrr}
x_1&+x_2&-x_3&-x_4&=0 \
2x_1&+3x_2&+x_3&-2x_4&=0
end{array}
right.
$$
Решение. Здесь
$$
A=
left(
begin{array}{rrrr}
1 & 1 & -1 & -1 \
2 & 3 & 1 & -2 \
0 & 0 & 0 & 0 \
0 & 0 & 0 & 0
end{array}
right), quad det (A-lambda E) = lambda^2(lambda^2-4lambda+1),
$$
$$
A^2-4A+E=
left(
begin{array}{rrrrr}
0 & 0 & 4 & 1 \
0 & 0 & -3 & 0 \
0 & 0 & 1 & 0 \
0 & 0 & 0 & 1
end{array}
right)
$$
Ответ.9) $ { [4_{},-3,1,0]^{top}, [1,0,0,1]^{top} } $.
§
Блок-схемы зависимости множества решений системы уравнений $ AX= mathcal B $ от комбинации чисел $ n, mathfrak r $
☞
ЗДЕСЬ.
Геометрическая интерпретация
Геометрический смысл введенных определений поясним на примере $ mathbb R^{3} $.
Уравнение
$$
a_1x_1+a_2x_2+a_3x_3=b
$$
— при фиксированных вещественных коэффициентах $ a_1,a_2,a_3 $ (хотя бы один из них считаем отличным от нуля) и $ b_{} $ — задает плоскость. Если, к примеру, $ a_1ne 0 $, то из уравнения получаем выражение для $ x_{1} $ как функции $ x_2,x_3 $:
$$
x_1=frac{b}{a_1}-frac{a_2}{a_1}x_2-frac{a_3}{a_1}x_3 .
$$
В этом представлении переменные $ x_{2} $ и $ x_{3} $ могут принимать любые вещественные значения независимо друг от друга, а вот переменная $ x_{1} $ полностью определяется заданием $ x_{2} $ и $ x_{3} $. С одной стороны, последняя формула определяет общее решения системы линейных уравнений (которая в нашем частном случае состоит из одного-единственного уравнения); переменные $ x_{2} $ и $ x_{3} $ выбраны основными, а $ x_{1} $ оказывается зависимой. Строго говоря, координаты любой точки плоскости можно представить формулами
$$x_1=frac{b}{a_1}-frac{a_2}{a_1}t-frac{a_3}{a_1}u, x_2=t, x_3=u quad npu quad {t,u} subset mathbb R , $$
которые называются параметрическим представлением плоскости. Таким образом, получили геометрическую интерпретацию общего решения системы уравнений. Идем далее: представим последние формулы в векторной форме:
$$
left(
begin{array}{c}
x_1 \ x_2 \ x_3
end{array}
right)=
left(
begin{array}{c}
b/a_1- t, a_2/a_1- u, a_3/a_1 \ t \ u
end{array}
right)=
left(
begin{array}{c}
b/a_1\ 0 \ 0
end{array}
right)+
t
left(
begin{array}{c}
-a_2/a_1\ 1 \ 0
end{array}
right)
+
u
left(
begin{array}{c}
-a_3/a_1\ 0 \ 1
end{array}
right) .
$$
Какой геометрический смысл имеет каждое из слагаемых? Первое слагаемое
$$ X_0=left(
begin{array}{c}
b/a_1\ 0 \ 0
end{array}
right)
$$
получается при задании $ t=0,u=0_{} $ в общем решении. Это — частное решение нашего уравнения и определяет точку, через которую проходит плоскость. Два оставшихся столбца
$$ X_1=left(
begin{array}{c}
-a_2/a_1\ 1 \ 0
end{array}
right) quad u quad
X_2=left(
begin{array}{c}
-a_3/a_1\ 0 \ 1
end{array}
right)
$$
не задают решения нашего уравнения — если только $ bne 0_{} $. Но оба удовлетворяют однородному уравнению
$$
a_1x_1+a_2x_2+a_3x_3=0 ,
$$
Последнее также определяет плоскость — параллельную исходной и проходящую через начало координат. Первая плоскость получается из второй сдвигом (параллельным переносом) на вектор
$ vec{OX_0} $: и этот факт составляет геометрическую интерпретацию теоремы, сформулированной в конце
☞
ПУНКТА:
Т
Теорема. Общее решение системы уравнений $ A X=mathcal B $ представимо в виде суммы какого-то частного решения этой системы и общего решения соответствующей однородной системы $ A X=mathbb O $.
Координаты произвольной точки плоскости $ a_1x_1+a_2x_2+a_3x_3=0 $ задаются соотношениями
$$
left(
begin{array}{c}
x_1 \ x_2 \ x_3
end{array}
right)=tX_1+uX_2 .
$$
Векторы пространства $ vec{OX_1} $ и $ vec{OX_2} $ являются базисными векторами плоскости — любой вектор $ vec{OX} $, лежащий в плоскости, через них выражается и они линейно независимы. Но $ X_{1} $ и $ X_{2} $ определяют фундаментальную систему решений однородного уравнения. Таким образом, мы получили геометрическую интерпретацию для ФСР: она задает базисные векторы плоскости, проходящей через начало координат.
Теперь рассмотрим систему из двух уравнений:
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+a_{13}x_3 &=&b_1,\
a_{21}x_1 +a_{22}x_2+a_{23}x_3 &=&b_2.
end{array}right.
$$
Ее можно интерпретировать как пересечение двух плоскостей в $ mathbb R^{3} $. Здесь уже возможны варианты: пересечение может оказаться как пустым так и непустым. От чего это зависит? — В соответствии с теоремой Кронекера-Капелли, надо сравнить два числа
$$
operatorname{rank}
left(
begin{array}{ccc}
a_{11} & a_{12} & a_{13} \
a_{21} & a_{22} & a_{23}
end{array}
right)
quad u quad
operatorname{rank}
left(
begin{array}{cccc}
a_{11} & a_{12} & a_{13} & b_1 \
a_{21} & a_{22} & a_{23} & b_2
end{array}
right) .
$$
Очевидно, ни одно из них не может быть большим $ 2_{} $. Если оба равны $ 2_{} $ и этот факт обеспечен, например, условием
$$
left|
begin{array}{cc}
a_{11} & a_{12} \
a_{21} & a_{22}
end{array}
right| ne 0,
$$
то решения системы определяют прямую в пространстве. Действительно, при таком условии систему можно разрешить относительно неизвестных $ x_{1} $ и $ x_{2} $ и представить общее решение в виде:
$$
x_1= frac{left|begin{array}{cc} b_1 & a_{12} \ b_2 & a_{22} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|}+
frac{left|begin{array}{cc} a_{12} & a_{13} \ a_{21} & a_{23} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|}x_3
,
quad
x_2= frac{left|begin{array}{cc} a_{11} & b_{1} \ a_{12} & b_{2} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|}-
frac{left|begin{array}{cc} a_{11} & a_{13} \ a_{21} & a_{23} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|}x_3 .
$$
В этих формулах переменная $ x_{3} $ принимает любое значение, а значения переменных $ x_{1} $ и $ x_{2} $ линейно выражаются через $ x_{3} $. Общее решение фактически задает прямую в параметрическом виде: координаты произвольной ее точки определяются формулами
$$
left(
begin{array}{c}
x_1 \ x_2 \ x_3
end{array}
right)=X_0+tX_1 ,
$$
где вектор
$$
quad X_0 = left(frac{left|begin{array}{cc} a_{11} & b_{1} \ a_{12} & b_{2} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|} , frac{left|begin{array}{cc} a_{11} & b_{1} \ a_{12} & b_{2} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|}, 0right)^{top}
$$
задает координаты точки, лежащей на прямой (т.е. принадлежащей пересечению плоскостей),
а вектор
$$
X_1= left(frac{left|begin{array}{cc} a_{12} & a_{13} \ a_{21} & a_{23} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|},
–
frac{left|begin{array}{cc} a_{11} & a_{13} \ a_{21} & a_{23} end{array} right|}{left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|}, 1
right)^{top}
$$
является направляющим для прямой. С тем же успехом мы могли бы взять в качестве направляющего вектор, получающийся растяжением $ X_{1} $:
$$
tilde X_1 =
left(left|begin{array}{cc} a_{12} & a_{13} \ a_{21} & a_{23} end{array} right|,
–
left|begin{array}{cc} a_{11} & a_{13} \ a_{21} & a_{23} end{array} right|, left|begin{array}{cc} a_{11} & a_{12} \ a_{21} & a_{22} end{array} right|
right)^{top} .
$$
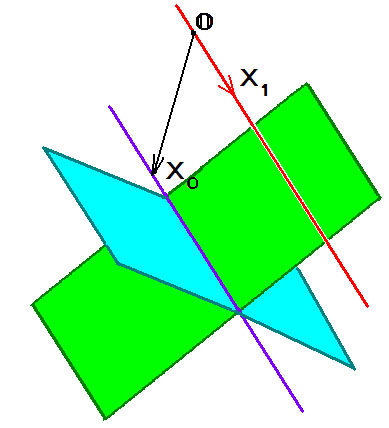
Очевидно, что любой из векторов $ X_{1} $ или $ tilde X_1 $ задает фундаментальную систему решений однородной системы уравнений10)
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+a_{13}x_3 &=&0,\
a_{21}x_1 +a_{22}x_2+a_{23}x_3 &=&0.
end{array}right.
$$
Последняя определяет прямую в $ mathbb R^3 $, проходящую через начало координат. Мы снова получаем интерпретацию теоремы: общее решение неоднородной системы получается сдвигом (параллельным переносом) общего решения однородной системы на вектор $ vec{OX_0} $.
Мы рассмотрели пока только случай пересекающихся плоскостей в пространстве. Его можно считать общим, т.е. случаем «как правило»: две случайным образом выбранные плоскости в $ mathbb R^{3} $ пересекаться будут. Исследуем теперь исключительный случай — параллельности плоскостей. Исключительность этого случая может быть проверена и аналитикой. Для несовместности системы из двух уравнений необходимо, чтобы ранг ее матрицы
$$
left(
begin{array}{ccc}
a_{11} & a_{12} & a_{13} \
a_{21} & a_{22} & a_{23}
end{array}
right)
$$
оказался меньшим $ 2_{} $. Это равносильно тому, что все миноры второго порядка этой матрицы обращаются в нуль:
$$
left|
begin{array}{cc}
a_{11} & a_{12} \
a_{21} & a_{22}
end{array}
right|=0,
left|
begin{array}{cc}
a_{12} & a_{13} \
a_{22} & a_{23}
end{array}
right| =0,
left|
begin{array}{cc}
a_{11} & a_{13} \
a_{21} & a_{23}
end{array}
right|=0 .
$$
Эти условия можно переписать в виде
$$
frac{a_{11}}{a_{21}}=frac{a_{12}}{a_{22}}=frac{a_{13}}{a_{23}} ;
$$
и, если обозначить общую величину последний отношений через $ tau_{} $, то получаем:
$$
(a_{11},a_{12},a_{13})=tau (a_{21},a_{22},a_{23}) .
$$
Если вспомнить, что каждый из этих наборов коэффициентов задает вектор $ vec{OA^{[1]}} $ в $ mathbb R^{3} $, перпендикулярный соответствующей плоскости, то, в самом деле, плоскости, определяемые уравнениями, оказываются параллельными. Пересекаться они, как правило, не будут: для пересечения необходимо, чтобы
расширенная матрица системы
$$
left(
begin{array}{cccc}
a_{11} & a_{12} & a_{13} & b_1 \
a_{21} & a_{22} & a_{23} & b_2
end{array}
right)
$$
имела ранг меньший $ 2_{} $. Это возможно только при условии когда коэффициенты правых частей удовлетворяют соотношению
$$ b_1 = tau b_2 $$
при величине $ tau_{} $ определенной выше.
При выполнении этого условия второе уравнение получается из первого домножением на $ tau_{} $ и соответствующие плоскости попросту совпадают.
Перейдем теперь к системе из трех уравнений:
$$
left{
begin{array}{rrrl}
a_{11}x_1 +&a_{12}x_2+&a_{13}x_3=&b_1, \
a_{21}x_1 +&a_{22}x_2+&a_{23}x_3=&b_2, \
a_{31}x_1 +&a_{32}x_2+&a_{33}x_3=&b_3.
end{array}
right.
$$
Вариантов взаимного расположения трех плоскостей в $ mathbb R^{3} $ уже значительно больше.
Какой из них будет самым распространенным, то есть случаем «как правило»? Геометрически ответ очевиден:
если пересечение двух плоскостей определяет, как правило, прямую, то эта прямая пересекается с третьей плоскостью,
как правило, в одной-единственной точке. И алгебра подтверждает геометрию: в комментарии к теореме Крамера
говорится, что система, число уравнений которой совпадает с числом неизвестных, как правило, имеет единственное
решение. Условие для этого случая «как правило» дается той же теоремой Крамера:
$$
left|
begin{array}{lll}
a_{11} & a_{12} & a_{13}\
a_{21} & a_{22} & a_{23} \
a_{31} & a_{32} & a_{33}
end{array}
right| ne 0 .
$$
Теорема Кронекера-Капелли в этом случае не нужна — нет, она остается справедливой! — но проверка условия на ранги матриц тривиальна: они оба равны $ 3_{} $. Если же указанный определитель обращается в нуль, то этот факт эквивалентен тому, что три строки определителя линейно зависимы. Например, возможно, что строка $ (a_{31},a_{32}, a_{33}) $ может быть представлена в виде линейной комбинации первых двух строк. Вспомним геометрический смысл этих строк: они задают координаты векторов, перпендикулярных соответствующим плоскостям. Если система уравнений
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+a_{13}x_3 &=&b_1,\
a_{21}x_1 +a_{22}x_2+a_{23}x_3 &=&b_2
end{array}right.
$$
определяет прямую в $ mathbb R^{3} $, то оба вектора $ vec{OA^{[1]}} $ и $ vec{OA^{[2]}} $ при $ A^{[1]}= (a_{11},a_{12}, a_{13}) $ и $ A^{[2]}= (a_{21},a_{22}, a_{23}) $ перпендикулярны этой прямой; любая их комбинация также перпендикулярна этой прямой, а, следовательно, плоскость
$$ a_{31}x_1 +a_{32}x_2+a_{33}x_3 =b_3 $$
будет ей параллельна.
Статья не закончена!
Ортогональность
Геометрические соображения из предыдущего пункта могут быть обобщены на случай когда размерности рассматриваемых пространств увеличиваются, и мы говорим о точках и векторах многомерных пространств. В последующих пунктах нам потребуются понятия линейной оболочки, линейного пространства, размерности, базиса и координат применительно к векторам-столбцам или векторам-строкам. Их можно найти
☞
ЗДЕСЬ.
Задача решения системы линейных уравнений
$$
left{
begin{array}{rrrr}
3x_1&+4x_2&-x_3&=2, \
x_1&-2x_2&+3x_3&=1
end{array}
right.
$$
может быть рассмотрена с двух точек зрения. С одной стороны, переписав систему в виде
$$
x_1left(begin{array}{r}
3 \ 1
end{array}
right)+
x_2left(begin{array}{r}
4 \ -2
end{array}
right)+
x_3left(begin{array}{r}
-1 \ 3
end{array}
right)=
left(begin{array}{r}
2 \ 1
end{array}
right) ,
$$
можно говорить о поиске линейной комбинации столбцов
$$
left(begin{array}{r}
3 \ 1
end{array}
right),
left(begin{array}{r}
4 \ -2
end{array}
right),
left(begin{array}{r}
-1 \ 3
end{array}
right)
$$
равной заданному столбцу
$$
left(begin{array}{r}
2 \ 1
end{array}
right) .
$$
В случае произвольной системы, записанной в матричном виде
$$ A_{mtimes n}X=mathcal B_{m times 1} $$
совместность системы интерпретировать в смысле принадлежности столбца $ mathcal B $ линейной оболочке столбцов $ A_{[1]},dots,A_{[n]} $:
$$ mathcal B=x_1 A_{[1]}+dots+x_nA_{[n]} quad iff quad mathcal B in mathcal L (A_{[1]},dots,A_{[n]}) . $$
В случае положительного ответа числа $ x_{1},dots,x_n $ интерпретируются как координаты столбца $ mathcal B $ в системе столбцов11) $ {A_{[1]},dots,A_{[n]}} $.
С другой стороны, к той же задаче решения системы уравнений, в предыдущем ПУНКТЕ мы подошли с другой стороны. Первое из уравнений системы
$$ 3,x_1+4,x_2-x_3=2 $$
можно интерпретировать так: скалярное произведение векторов $ vec{{mathbf OA}^{[1]}} $ и
$ vec{{mathbf OX}} $ равно фиксированному числу $ 2_{} $. Здесь вектора рассматриваются в пространстве строк $ mathbb R_{}^{3} $; считается, что каждый вектор имеет начало в начале координат $ mathbf O=[0,0,0] $, а конец — в точке с координатами $ [3,4,-1] $ или, соответственно, $ [x_1,x_2,x_3] $. Если скалярное произведение векторов обозначать скобками $ langle {} mbox{ } rangle $, то систему уравнений можно переписать в виде
$$ langle vec{{mathbf OA}^{[1]}} , vec{{mathbf OX}} rangle=2, langle vec{{mathbf OA}^{[2]}} , vec{{mathbf OX}} rangle=1 quad npu quad A^{[1]} = [3,4,-1], A^{[2]}=[1,-2,3] $$
— строках матрицы $ A_{} $. И задачу решения такой системы понимать в смысле: найти координаты всех векторов-строк $ [x_1,x_2,x_3] $ которые обеспечат нам заданные значения скалярных произведений с двумя фиксированными векторами.
Геометрическая интерпретация еще более упрощается если рассмотреть случай однородной системы уравнений. Так, решить систему уравнений
$$
left{
begin{array}{rrrr}
3x_1&+4x_2&-x_3&=0, \
x_1&-2x_2&+3x_3&=0
end{array}
right.
$$
означает подобрать вектор $ vec{{mathbf OX}} $ перпендикулярный (ортогональный) одновременно обоим векторам $ vec{{mathbf OA}^{[1]}} $ и $ vec{{mathbf OA}^{[2]}} $. Очевидно, что таких векторов в $ mathbb R^{3} $ бесконечно много — найдя хотя бы один такой вектор $ vec{{mathbf OX}} $, другие получим его растяжением: $ alpha cdot vec{{mathbf OX}} $ остается перпендикулярным векторам $ vec{{mathbf OA}^{[1]}} $ и $ vec{{mathbf OA}^{[2]}} $ при $ forall alpha in mathbb R $.
Все эти геометрические соображения обобщаются в произвольное пространство $ mathbb R_{}^{n} $ строк или столбцов, состоящих из $ n_{} $ вещественных чисел (компонент). Для этого приходится обобщать понятие скалярного произведения. В общем случае оно вводится аксиоматически (и, более того, в одном и том же множестве может быть определено разными способами, см.
☞
ЕВКЛИДОВО ПРОСТРАНСТВО ). Мы сейчас не будем залезать так глубоко в эту аксиоматику, а просто определим скалярное произведение двух строк $ X=[x_1,x_2,dots,x_n] $ и $ Y=[y_1,y_2,dots,y_n] $ формулой
$$ langle X,Y rangle=x_1y_1+x_2y_2+dots+x_ny_n $$
и продекларируем без обоснований, что все привычные нам по случаям $ mathbb R^{2} $ и $ mathbb R^{3} $ свойства скалярного произведения будут выполнены.
В терминах скалярного произведения, задачу решения системы линейных уравнений можно переформулировать как поиск строки $ X=[x_1,x_2,dots,x_n] $, ортогональной всем строкам матрицы $ A_{} $:
$$ langle A^{[1]},X rangle=0, langle A^{[2]},X rangle=0,dots, langle A^{[m]},X rangle=0 . $$
Множество таких строк образует линейное подпространство пространства $ mathbb R_{}^{n} $, это подпространство является ортогональным дополнением линейной оболочки
$ mathcal L ( A^{[1]}, A^{[2]},dots, A^{[m]} ) $ в пространстве $ mathbb R_{}^{n} $.
Это подпространство называется нуль-пространством матрицы или ядром матрицы $ A_{} $ и обозначается12) $ {mathcal K}er (A) $.
Фундаментальная система решений системы $ AX=mathbb O $ составляет базис этого подпространства. Для произвольного линейного пространства количество векторов его базиса называется размерностью пространства и обозначается $ operatorname{dim} $. Во введенных обозначениях теорема из
☞
ПУНКТА переформулируется так:
Т
Теорема. $ operatorname{dim} left( {mathcal K}er (A) right)=n- mathfrak r $, где $ n_{} $ — количество столбцов матрицы $ A_{} $, а $ mathfrak r=operatorname{rank} (A) $ — ее ранг.
Основная теорема линейной алгебры
Приближенные методы решения
Метод Монте-Карло
Псевдорешение системы линейных уравнений
Здесь рассматриваются системы только с вещественными коэффициентами. Постановка задачи тесно увязана с основной задачей
☞
МЕТОДА НАИМЕНЬШИХ КВАДРАТОВ.
В практических задачах часто бывает нужно найти решение, удовлетворяющее
большому числу возможно противоречивых требований. Если такая задача
сводится к системе линейных уравнений
$$
left{begin{array}{ccc}
a_{11}x_1 +a_{12}x_2+ldots+a_{1n}x_n &=&b_1\
a_{21}x_1 +a_{22}x_2+ldots+a_{2n}x_n &=&b_2\
ldots& & ldots \
a_{m1}x_1 +a_{m2}x_2+ldots+a_{mn}x_n &=&b_m
end{array}right.
iff
AX={mathcal B}
$$
при числе уравнений $ m_{} $ большем числа неизвестных $ n_{} $, то такая переопределенная система, как правило, несовместна (см. рассуждения
☝
ВЫШЕ ). В этом случае задача может быть решена только путем выбора некоторого компромисса: все требования могут быть удовлетворены не полностью,
а лишь до некоторой степени.
Псевдорешением системы уравнений называется столбец $ X_{} $, обеспечивающий минимум величины
$$
sum_{j=1}^m [a_{j1}x_1 +a_{j2}x_2+dots+a_{jn}x_n-b_j]^2
$$
или, что то же, минимум квадрату евклидовой нормы вектора $ AX- mathcal B $:
$$ min_{Xin mathbb R^n} left| AX- mathcal B right|^2 . $$
Такому определению можно также соотнести вероятностную интерпретацию. Пусть для определения неизвестных величин $ x_{1},dots,x_n $ проводятся $ m_{} $ экспериментов, описываемых линейными уравнениями:
$$a_{j1}x_1 +a_{j2}x_2+dots+a_{jn}x_n =b_j npu jin {1,dots,m}
.$$
При этом величины $ a_{jk}^{} $ — известные постоянные, не подверженные погрешностям, сопутствующим экспериментам (наблюдениям), в то время как величины $ b_{j} $ этим
погрешностям подвержены. Формально каждое из равенств следует рассматривать как
приближенное.
Понятно, что при таких обстоятельствах не имеет смысла гоняться за
точным решением системы (его может и не
существовать вовсе!). Искать следует приближенное решение, оптимальное
в некотором смысле. Оказывается, что именно выбор критерия в виде cуммы квадратов разностей левых и правых частей системы обеспечивает то, что псевдорешение дает
максимально правдоподобные значения неизвестных величин $ x_{1},dots,x_n $.
?
На дубовой колоде лежит мелкая монетка. К колоде
по очереди подходят четыре рыцаря и каждый наносит удар мечом, стараясь
попасть по монетке. Все промахиваются. Расстроенные,
рыцари уходят в харчевню пропивать злосчастную монетку. Укажите
максимально правдоподобное ее расположение, имея перед глазами зарубки:
$$
begin{array}{rrcr}
3, x &- 2, y&=& 6,\
x &-3,y&=&-3,\
11,x& + 14,y&=& 154, \
4,x&+y&=&48.
end{array}
$$
Т
Теорема. Существует псевдорешение системы
$ AX= {mathcal B} $ и оно является решением системы
$$
left[A^{top}A right]X=A^{top} {mathcal B} .
$$
Это решение будет единственным тогда и только тогда, когда $ operatorname{rank} (A) =n $.
<note cert>
Образно говоря: как правило несовместная система $ AX={mathcal B} $ станет совместной если мы домножим обе ее части слева на матрицу $ A^{top} $.
<note>
Доказательство
☞
ЗДЕСЬ.
П
Пример. Найти псевдорешение системы
$$x_1+x_2 = 2, x_1-x_2 = 0, 2, x_1+x_2 = 2 .$$
Решение. Имеем:
$$A=left( begin{array}{rr}
1 & 1 \
1 & -1 \
2 & 1
end{array}
right),
operatorname{rank}(A) =2,
{mathcal B} =
left( begin{array}{r}
2 \ 0 \ 2
end{array}
right),
A^{top}A= left( begin{array}{rr}
6 & 2 \
2 & 3
end{array}
right),
A^{top} {mathcal B} =
left( begin{array}{r}
6 \ 4
end{array}
right).
$$
Ответ. $ x_1=5/7, x_2 =6/7 $.
Задачи
Источники
[1]. Стренг Г. Линейная алгебра и ее применения. М.Мир.1980
[2]. Утешев А.Ю., Калинина Е.А. Лекции по высшей алгебре. Часть II. Учеб. пособие. СПб. «СОЛО». 2007. 279 c.
Определение понятия функции. Переменные.
Определение
Зависимость переменной у от переменной х, при которой любому значению переменной х соответствует единственное значение переменной у, называют функцией.
- х – это независимая переменная, ее называют аргумент.
- у – это зависимая переменная.
Ключевое слово, которое нужно запомнить в определении функции – это зависимость.
Например, человек идет на деловую встречу, но чувствует, что он опаздывает. Он ускоряет свой шаг, потому что от его скорости зависит время. Чем быстрее он двигается, тем меньше времени уйдет у него на дорогу. То есть время зависит от скорости.
Или, например, спортсмен метает ядро на дальнее расстояние. Чем сильнее будет бросок, тем дальше полетит ядро. Скорость полета зависит от силы толчка. Здесь опять прослеживается зависимость.
Функцию коротко записывают так: y = f(x). Вместо буквы f может быть использована и другая буква. Чтение данной записи следующее: “у равно f от х”.
Например, функция задана формулой у = – 3х2 – 7. Равносильная ей запись такая: f(x)= – 3х2 – 7.
Пример 1. Найти значение функции f(x)= – 3х2 – 7 для значений аргумента, равных –5 и 4.
Подставим в формулу вместо х значения, сначала (-5), а затем 4
f (–5) = – 3.(–5)2 – 7 = –75–7 = –82
f (4) = – 3.(4)2 – 7 = – 48 – 7 = –55
Пример 2. Найти значение х, при котором функция, заданная формулой f (х) = 3х+2, принимает значение равное 5.
Так как дано, что значение равно 5, то значит f (х) = 5, составим и решим уравнение: 5=3х + 2
выполним перенос слагаемого 2 в левую часть, изменяя при этом знак: 5 – 2 = 3х
приведем подобные слагаемые в левой части уравнения: 3 = 3х
найдем неизвестный множитель делением: х = 1
Ответ: х=1.
Области определения и значения функции
Определение
Все возможные значения независимой переменной (х) называют областью определения функции.
Все значения, которые принимает зависимая переменная (у) называют областью значений функции.
Если какая-либо функция у=f(x) задана формулой, а при этом ее область определения не указана, то считается, что она состоит из любых значений переменной, при которых выражение имеет смысл.
Области определения и значений школьных функций
1. Для линейной функции областью определения будет являться любое число.
Если у такой функции k≠0, то областью ее значений также будет являться любое число.
При k=0 область значений этой функции состоит из единственного числа b.
Например, функция задана формулой у = 7. Тогда ее область значения — это число 7, а область определения – любое число.
2. Гипербола задается формулой вида y = k/x.
Область определения такой функции – любое число, кроме нуля.
Область значений такой функции – аналогичная.
3. Функция, заданная формулой y= |x|, имеет область определения – любое число.
4. У функций у = х2 и у = х3 область определения – любое число.
Для того чтобы понимать, как находится область определения функции и рассмотреть примеры заданий на нахождение области определения функции, вспомним правила, при которых существуют ограничения и выражение не имеет смысл: нельзя делить на нуль; нельзя извлекать квадратный корень из отрицательного числа.
Пример 3. Рассмотрим, как находится область определения функций, которые заданы следующими формулами:
- у = 5х + 2
Данное выражение будет иметь смысл при любом значении х, так как все действия здесь выполнимы. Например, подставив нуль, получим, что 5×0 + 2 = 2. Также при любых отрицательных или положительных значениях х выражение будет иметь смысл.
- у = – 8х2 – 4
Данное выражение содержит степень. Все действия здесь так же выполнимы при любом значении х.
- у = 87/(х + 11)
В знаменателе этого выражения содержится переменная х, поэтому надо проверить, при каком значении он может быть равным нулю и исключить это значение из области определения, так как на знаменатель делят, а на нуль делить нельзя.
Итак, имеем знаменатель х + 11. Приравниваем его к нулю, получаем х + 11 = 0. Решаем простое уравнение на нахождение неизвестного слагаемого и получаем х= – 11. Это число исключаем из области определения функции.
- у = √х
Выражение содержит квадратный корень из переменной х. Знаем, что он может извлекаться только из положительного или равного нулю числа. Поэтому область определения будет х≥0.
Ответ: (1) и (2) – множество всех чисел; (3) – любое число, кроме (-11) или х ≠ – 11; (4) х ≥0.
Нахождение области определения функции
- Если выражение целое и не содержит квадратного корня, то оно имеет смысл при любом значении независимой переменной. Следовательно, областью определения будет являться множество всех чисел.
- Если выражение дробное, то необходимо исключить те значения, которые обращают знаменатель в нуль. Для этого знаменатель дроби приравнять к нулю и решить полученное уравнение. Областью определения будут являться все числа, кроме тех, которые получились при решении уравнения.
Даниил Романович | Просмотров: 13.5k
Обновлено: 15.05.2023
С научной точки зрения, переменная – это то, что изучают исследователи. Каждый научный эксперимент включает как минимум одну независимую переменную и одну зависимую переменную. Откройте для себя разницу между этими двумя типами переменных и просмотрите несколько примеров каждого типа.
Определены зависимые переменные
Зависимые переменные факторы, изучаемые с точки зрения их изменения по отношению к независимым переменным. В научном исследовании зависимая переменная – это переменная, которую исследователь проверяет и измеряет по отношению к независимой переменной. Исследователь пытается определить, приведет ли манипулирование независимой переменной к различным результатам в отношении зависимой переменной.
Определены независимые переменные
В исследовании или эксперименте независимые переменные называются лечебными переменными. Они не меняются по отношению к другим факторам. Вместо этого научные исследователи исследуют, вызывает ли независимая переменная изменение одной или нескольких зависимых переменных, ведет к или связана с ними.
- Рассматривая вес как зависимую переменную, ученые могут исследовать независимые переменные, такие как потребление калорий, потребление углеводов, потребление белка, потребление рафинированного сахара, уровень активности или другие факторы, которые могут повлиять на то, сколько весит человек.
- Изучая мастерство Microsoft Excel в качестве зависимой переменной, исследователи могли исследовать влияние независимых переменных, таких как время, потраченное на практику, завершение обучения, многолетний опыт работы с приложением или другие факторы, которые потенциально могут повлиять на чью-либо способность эффективно использовать Excel.
Независимые и зависимые переменные в исследованиях
В каждом научном эксперименте есть как минимум одна независимая переменная и одна зависимая переменная в зависимости от исследуемого вопроса (ов) исследования. В любом данном исследовании конкретная переменная должна быть либо зависимой, либо независимой. Переменная не может быть одновременно двумя типами.
Например, если ученый проводит эксперимент, чтобы проверить теорию о том, что конкретный витамин может увеличить продолжительность жизни человека, то:
- В независимая переменная количество витамина, которое дается испытуемым в ходе эксперимента. Это контролирует ученый-экспериментатор.
- В зависимая переменная, или переменная, на которую влияет независимая переменная, – это продолжительность жизни.
Независимые переменные и зависимые переменные могут варьироваться от человека к человеку, и именно различия проверяются; то есть, живут ли люди, получившие витамин, дольше, чем люди, не получившие витамин. Затем ученый может провести дальнейшие эксперименты, изменяя другие независимые переменные – пол, этническую принадлежность, общее состояние здоровья и т. Д. – чтобы оценить полученные зависимые переменные и сузить влияние витамина на продолжительность жизни при различных обстоятельствах.
Примеры зависимых и независимых переменных
Есть много примеров зависимых и независимых переменных в научных экспериментах, а также в академических и прикладных исследованиях.
Загрузка углеводов и выносливость
Физиологу интересно, влияет ли углеводная загрузка (употребление большого количества углеводов) за день до участия в упражнениях на выносливость (таких как триатлон или марафон) на результативность.
- независимая переменная- количество потребленных углеводов за определенный период времени
- зависимая переменная – выступление в упражнениях на выносливость
Онкологическая медицина
Ученый изучает влияние лекарства на рак.
- независимая переменная – прием препарата (например, дозировка или время)
- зависимая переменная – влияние препарата на рак
Крысы и привязанность
Ученый изучает влияние сдерживания привязанности у крыс.
- независимая переменная – количество привязанности
- зависимая переменная – реакция крыс
Языковое мастерство
Исследователь изучает, изучают ли новые языки люди, которые уже говорят на нескольких языках, быстрее, чем люди, говорящие только на одном языке.
- независимая переменная- количество языков, на которых говорят
- зависимая переменная – количество времени на освоение нового языка
Образование и заработок
Исследователь хочет знать, влияет ли уровень образования на то, сколько человек зарабатывает на своей работе.
- независимая переменная- высший уровень образования
- зависимая переменная – заработок (оклад или заработная плата)
Национальное происхождение и чистая стоимость
Социальный ученый задается вопросом, существует ли связь между национальным происхождением человека и его богатством, измеряемым чистым капиталом.
- независимая переменная- страна происхождения человека
- зависимая переменная – чистая финансовая стоимость человека
Время, потраченное на учебу и академические успехи
Исследователь в области образования исследует, существует ли связь между количеством времени, которое кто-то тратит на обучение, и оценкой, которую он получает в конкретном классе.
- независимая переменная- количество времени, потраченного на обучение в конкретном классе
- зависимая переменная – оценка в классе
Удовлетворенность работой и оплата
Специалист в области управления персоналом задается вопросом, может ли размер заработка человека повлиять на степень его удовлетворенности работой.
- независимая переменная- компенсация (оклад или заработная плата)
- зависимая переменная – удовлетворение от работы
Солнечный свет и рост растений
Ботаник задается вопросом, влияет ли количество прямого солнечного света на растение на скорость его роста.
- независимая переменная- количество прямого солнечного света, которое получает растение
- зависимая переменная – скорость роста растений
Путешествие самолетом и заражение гриппом
Медицинский исследователь задается вопросом, влияет ли количество авиаперелетов, которые совершает человек, на его вероятность заразиться гриппом во время сезона гриппа.
- независимая переменная- количество авиаперелетов
- зависимая переменная – гриппозные инфекции
Лечение хиропрактики и мигрени
Научный исследователь задается вопросом, снижает ли регулярная хиропрактика частота и / или тяжесть эпизодов мигрени.
- независимая переменная- как часто получают хиропрактику
- зависимые переменные – частота приступов мигрени; тяжесть приступов мигрени
Социально-экономический статус и количество детей
Социальный ученый исследует, существует ли связь между социально-экономическим статусом и количеством детей.
- независимая переменная- социоэкономический статус
- зависимая переменная – количество детей
Просмотр новостей и знание фактов
Исследователь медиа-исследований задается вопросом, влияет ли количество времени, которое человек тратит на просмотр телевизионных новостей, на то, сколько фактической информации люди знают о текущих событиях.
Понимание переменных
Знание различий между независимыми и зависимыми переменными может помочь вам лучше понять научный метод. Приведенные здесь примеры довольно простые. Вопросы научных исследований, экспериментов и статистического анализа данных могут быть очень сложными. Изучение того, как распознавать разницу между независимыми и зависимыми переменными, обеспечит вам прочную основу, прежде чем вы начнете изучать другие типы переменных. Чтобы еще больше расширить свои исследовательские навыки, просмотрите несколько примеров заявлений о целях исследовательских работ. Это может помочь вам лучше понять контекст, в котором определены переменные.
Если зависимая- функция, то независимая- аргумент, а как еще ее назвать, при построении графика, ось абсцисс- аргумент, независимая переменная, ось ординат- функция- зависимая переменная величина, вот график всегда показывает, что от чего зависит.
Четные соседние числа НЕ взаимно просты.
Нечетные соседние числа – ДА, взаимно просты.
Простое число – натуральное число, которое больше 1 и при этом делится только на 1 и на себя.
Два взаимно простых числа – натуральные, которые не имеют общих делителей, кроме 1.
Число 1 – взаимно простое с любым числом.
Два четных числа имеют общий делитель 2, (по определению четного числа), поэтому не могут быть взаимно простыми.
Для того чтобы возвести число в дробную степень нужно выполнить две операции: во-первых, возвести число в степень числителя дробной степени (числитель – это то что у дроби находится сверху), во-вторых, из того что получилось после возведения в степень нужно извлеч корень той степени чему равен знаменатель дробной степени (знаменатель – это то что стоит внизу дроби). Например, нам нужно возвести 3 в степень 3/7, сначало мы возводим 3 в степень числителя т.е. в куб, получаем 27, а затем извлекаме корень седьмой степени. Если дробная степень представленна с целой частью, то есть например нужно 2 возвести в степень 1 целая 1/3 то степень нужно представить в виде обычной дроби т.е. в данном случае это будет 4/3, а затем производить вычисления, 2 возводим в 4 степень получаем 16 и затем берем кубический корень из 16. Таким же образом в случае если нужно возвести число в степень 1,5, степень можно представить в виде обычной дроби 15/10 или 3/2 и произвести вычисления.
чтобы возвести дробь в степень надо возвести в степень и числитель и знаменатель
Результатом возведения дроби в степень будет новая дробь у которой числитель равен числителю этой дроби в возведенному в степень, а знаменателем будет знаменатель этой дроби в возведенный в степень.
Зависимость переменной у от переменной х, при которой любому значению переменной х соответствует единственное значение переменной у, называют функцией.
- х – это независимая переменная, ее называют аргумент.
- у – это зависимая переменная.
Ключевое слово, которое нужно запомнить в определении функции – это зависимость.
Например, человек идет на деловую встречу, но чувствует, что он опаздывает. Он ускоряет свой шаг, потому что от его скорости зависит время. Чем быстрее он двигается, тем меньше времени уйдет у него на дорогу. То есть время зависит от скорости.
Или, например, спортсмен метает ядро на дальнее расстояние. Чем сильнее будет бросок, тем дальше полетит ядро. Скорость полета зависит от силы толчка. Здесь опять прослеживается зависимость.
Функцию коротко записывают так: y = f(x). Вместо буквы f может быть использована и другая буква. Чтение данной записи следующее: “у равно f от х”.
Пример 1. Найти значение функции f(x)= – 3х 2 – 7 для значений аргумента, равных –5 и 4. Подставим в формулу вместо х значения, сначала (-5), а затем 4 f (–5) = – 3 . (–5) 2 – 7 = –75–7 = –82 f (4) = – 3 . (4) 2 – 7 = – 48 – 7 = –55 Пример 2. Найти значение х, при котором функция, заданная формулой f (х) = 3х+2, принимает значение равное 5. Так как дано, что значение равно 5, то значит f (х) = 5, составим и решим уравнение: 5=3х + 2 выполним перенос слагаемого 2 в левую часть, изменяя при этом знак: 5 – 2 = 3х приведем подобные слагаемые в левой части уравнения: 3 = 3х найдем неизвестный множитель делением: х = 1 Ответ: х=1.
Области определения и значения функции
Все возможные значения независимой переменной (х) называют областью определения функции.
Все значения, которые принимает зависимая переменная (у) называют областью значений функции.
Если какая-либо функция у=f(x) задана формулой, а при этом ее область определения не указана, то считается, что она состоит из любых значений переменной, при которых выражение имеет смысл.
Области определения и значений школьных функций
1. Для линейной функции областью определения будет являться любое число.
Если у такой функции k≠0, то областью ее значений также будет являться любое число.
При k=0 область значений этой функции состоит из единственного числа b.
Например, функция задана формулой у = 7. Тогда ее область значения — это число 7, а область определения – любое число.
2. Гипербола задается формулой вида y = k/x.
Область определения такой функции – любое число, кроме нуля.
Область значений такой функции – аналогичная.
3. Функция, заданная формулой y= |x|, имеет область определения – любое число.
4. У функций у = х 2 и у = х 3 область определения – любое число.
Для того чтобы понимать, как находится область определения функции и рассмотреть примеры заданий на нахождение области определения функции, вспомним правила, при которых существуют ограничения и выражение не имеет смысл: нельзя делить на нуль; нельзя извлекать квадратный корень из отрицательного числа.
Пример 3. Рассмотрим, как находится область определения функций, которые заданы следующими формулами:
- у = 5х + 2
- у = – 8х 2 – 4
- у = 87/(х + 11)
В знаменателе этого выражения содержится переменная х, поэтому надо проверить, при каком значении он может быть равным нулю и исключить это значение из области определения, так как на знаменатель делят, а на нуль делить нельзя.
Итак, имеем знаменатель х + 11. Приравниваем его к нулю, получаем х + 11 = 0. Решаем простое уравнение на нахождение неизвестного слагаемого и получаем х= – 11. Это число исключаем из области определения функции.
Ответ: (1) и (2) – множество всех чисел; (3) – любое число, кроме (-11) или х ≠ – 11; (4) х ≥0.
В типы переменных существующие можно классифицировать по различным критериям, которые мы обсудим в этой статье. Переменная – это нечто, качество или количество которой может варьироваться. Например, температура (количественная переменная) или качество сна (качественная переменная).
Другими словами, статистические переменные – это типологии, которые могут колебаться или варьироваться; это изменение можно измерить и наблюдать. Точно так же переменную можно понимать как абстрактную конструкцию, которая относится к свойству или элементу, который может играть определенную роль по отношению к объекту, который анализируется.
Это означает, что указанное свойство или элемент напрямую влияет на изучаемый предмет или объект. Концепция переменной направлена на объединение различных модальностей или вариантов, которые необходимо принимать во внимание для понимания объекта исследования.
Следовательно, значения переменных будут непоследовательными или разными в предметах и / или моментах, которые будут анализироваться. Понимание этой концепции в теоретической области может быть сложным.
Однако на конкретных примерах можно лучше понять подход: переменной может быть пол или возраст человека, поскольку эти характеристики могут влиять на объект исследования, если вы хотите провести анализ у пациентов, которые страдают сердечными или другими заболеваниями.
Типы переменных в зависимости от взаимосвязи с другими переменными
Помимо операционных переменных существует также классификация в соответствии с отношениями, существующими между значениями этих переменных. Необходимо иметь в виду, что роль каждого типа переменной зависит от анализируемой функции. Другими словами, на классификацию этих вариаций влияет объект исследования.
В этой классификации есть независимые, зависимые, модерирующие, странные, управляющие, ситуативные, участвующие и смешивающие переменные.
-Независимые переменные
Они относятся к переменным, которые принимаются во внимание в процессе исследования и могут быть изменены исследователем. Другими словами, речь идет о тех переменных, из которых аналитик начинает рассматривать и записывать эффекты, которые их характеристики производят на объект исследования.
пример
Примером независимой переменной может быть пол, а также возраст, если вы хотите создать реестр людей с болезнью Альцгеймера.
Можно установить, что независимая переменная обусловливает зависимую. Кроме того, независимое можно назвать экспериментальным или причинным, поскольку им непосредственно манипулирует исследователь. Независимые переменные используются в первую очередь для описания факторов, вызывающих конкретную проблему.
-Зависимые переменные
Это те, которые имеют прямую ссылку на элемент, который изменен вариацией, произведенной независимой переменной. Это означает, что зависимая переменная создается из независимой переменной.
Примеры
Например, если мы хотим определить депрессию по полу, последний будет независимой переменной; изменение этого параметра вызовет колебания зависимой переменной, которой в данном случае является депрессия.
-Модерирование переменных
Эти переменные изменяют или модифицируют отношения, существующие между зависимой и независимой переменной; отсюда и их название, поскольку они модерируют связь между двумя вышеупомянутыми.
пример
Например, учебные часы связаны с академическими последствиями; следовательно, регулирующей переменной может быть душевное состояние ученика или развитие его моторики.
-Странные переменные
Странные переменные получили свое название, потому что они не были приняты во внимание при разработке исследования, но они оказали заметное влияние на окончательные результаты. Они также известны как промежуточные или озадачивающие переменные, поскольку они могут ослабить связь между проблемой и возможной причиной.
Следовательно, это группа переменных, которые не контролировались во время анализа объекта исследования, но могут быть идентифицированы после завершения исследования, а в некоторых случаях они даже выявляются в ходе исследования.
пример
Например, переменной этого типа может быть тот факт, что нервные люди больше курят и имеют большую склонность к раку, чем те, кто не страдает нервозностью; странной или загадочной переменной в данном случае являются нервы.
-Переменный контроль
Контрольные переменные – это те, которые ученый хочет оставаться постоянными, и он должен наблюдать за ними так же тщательно, как и за зависимыми переменными.
Например, если ученый хочет изучить влияние диеты (VI) на здоровье (DV), контрольной переменной может быть то, что люди, участвующие в исследовании, не курят.
Это будет управляющая переменная; необходимо контролировать это, потому что наблюдаемые различия в состоянии здоровья могут быть связаны с тем, курят люди или нет. В любом случае в подобном эксперименте могут быть другие контрольные переменные; быть спортсменом, иметь другие привычки .
-Ситуационные переменные
Ситуационная переменная – это аспект среды, который может влиять на эксперимент. Например, качество воздуха в эксперименте, связанном со здоровьем.
-Переменные участники
Переменная участника или субъекта – это характеристика субъектов, изучаемых в эксперименте. Например, пол людей, участвующих в исследовании здоровья. Также известны как участвующие переменные.
-Переменная путаницы
Смешивающая переменная – это переменная, которая влияет как на независимую, так и на зависимую переменную. Например, стресс может заставить людей больше курить, а также напрямую влияет на их здоровье.
Типы переменных по работоспособности
-Качественные переменные
Качественные переменные – это те вариации, которые позволяют установить идентификацию конкретного элемента, но не могут быть определены количественно. Это означает, что эти переменные могут сообщать о существовании характеристики, но не могут быть оценены численно.
Следовательно, это вариации, которые определяют, есть ли равенство или неравенство, как это происходит с полом или национальностью. Хотя они не поддаются количественной оценке, эти переменные могут внести вклад в расследование.
Примером качественной переменной может служить мотивация учащихся в процессе обучения; эту переменную можно идентифицировать, но нельзя пронумеровать.
Кроме того, они могут быть подразделены на другие категории, такие как дихотомические качественные переменные и политомические качественные переменные.
Дихотомические качественные переменные
пример
Качественные политомические переменные
Эти статистические переменные являются противоположностью дихотомических переменных, поскольку они допускают существование трех или более значений. Однако во многих случаях это препятствует их заказу, поскольку они только устанавливают идентификацию стоимости.
пример
Точный пример – цветовая переменная, поскольку, хотя она позволяет идентифицировать, она заявляет, что существует только одна возможная характеристика или элемент, присваиваемый этой переменной.
-Квазиколичественные переменные
Эти переменные характеризуются невозможностью выполнения каких-либо математических операций; однако они более продвинуты, чем исключительно качественные.
Это связано с тем, что квазиколичественные методы позволяют установить иерархию или своего рода порядок, хотя их нельзя измерить количественно.
пример
Например, уровень обучения группы людей может быть переменной этого типа, поскольку получение степени аспиранта находится в более высокой иерархии, чем завершение степени бакалавра.
-Количественные переменные
Эти переменные, как следует из их названия, позволяют выполнять математические операции в пределах своих значений; следовательно, различным элементам этих переменных могут быть присвоены номера (то есть они могут быть определены количественно).
Некоторые примеры этого типа переменных включают следующее:
-Возраст, поскольку он может быть выражен в годах.
-Вес, который может быть определен в фунтах или килограммах.
-Расстояние между данным местом и местом отправления, которое может выражаться в километрах или минутах.
-Месячный доход, который может быть выражен в долларах, евро, песо, солях и других валютах.
В свою очередь, эти типы переменных можно разделить на две группы: дискретные количественные переменные и непрерывные количественные переменные.
Дискретные количественные переменные
Они относятся к количественным переменным, которые не могут иметь промежуточных значений – они не допускают десятичных знаков в своем числе. Другими словами, они должны быть пронумерованы до полного числа.
пример
Точный пример – невозможность иметь 1,5 детей; можно иметь только одного или двух детей. Это означает, что единицы измерения нельзя дробить.
Непрерывные количественные переменные
В отличие от дискретных, непрерывные переменные могут иметь десятичные дроби, поэтому их значения могут быть промежуточными.
Эти переменные измеряются интервальными шкалами. Другими словами, непрерывные количественные переменные можно разделить.
пример
Например, измерение веса или роста группы людей.
Переменные в зависимости от их масштаба
В дополнение к предыдущим классификациям, статистические переменные могут быть каталогизированы с учетом функции их шкал и мер, которые используются для их расчета; однако, говоря об этих переменных, больше внимания уделяется шкале, чем самой переменной.
В свою очередь, шкалы, используемые для переменных, могут претерпевать изменения в зависимости от уровня работоспособности, поскольку последний позволяет включать другие возможности в пределах диапазона шкал.
Несмотря на это, по шкале можно установить четыре основных типа переменных; Это следующие: номинальная переменная, порядковая переменная, интервальная переменная, переменная отношения и непрерывная переменная.
-Номинальная переменная
Этот тип переменных относится к тем переменным, значения которых позволяют выделить только одно конкретное качество, не вводя выполнение над ними математических операций. В этом смысле номинальные переменные эквивалентны качественным переменным.
пример
В качестве примера номинальной переменной можно найти пол, поскольку он делится на мужской и женский; а также семейное положение, которое может быть холостым, женатым, вдовцом или разведенным.
-Переменная для заказа
Эти переменные по сути качественные, поскольку они не позволяют выполнять математические операции; однако порядковые переменные позволяют устанавливать определенные иерархические отношения в своих значениях.
пример
Примером номинальной переменной может быть уровень образования или экономический статус человека. Другим примером может быть рейтинг успеваемости по следующим прилагательным: отлично, хорошо или плохо.
Переменные этого типа используются для иерархической классификации предметов, событий или явлений с учетом конкретных характеристик.
-Interval переменная
Это приводит к невозможности проведения преобразований непосредственно в других значениях. Следовательно, интервальные переменные измеряют не конкретные значения, а диапазоны; Это несколько усложняет операции, но способствует покрытию большого количества ценных бумаг.
Интервальные переменные могут быть представлены в градусах, величинах или любом другом выражении, которое символизирует количество. Точно так же они позволяют классифицировать и упорядочивать категории, а также указывать степени расстояния, которые существуют между ними.
пример
В рамках этой классификации может быть температура или IQ.
-Ration переменная
Этот тип переменной измеряется с помощью шкалы, которая работает в целом, что позволяет напрямую преобразовывать полученные результаты.
Кроме того, это также способствует выполнению операций со сложными числами. В этих переменных есть начальная точка, которая подразумевает полное отсутствие того, что было измерено.
Следовательно, переменные отношения действительно имеют абсолютный ноль, и расстояние между двумя точками всегда одинаково, хотя они также имеют характеристики предыдущих переменных.
Примеры
Например, переменными отношения являются возраст, вес и рост.
-Постоянная переменная
Другие менее известные
-Категорические переменные
Категориальные переменные – это переменные, значения которых могут быть выражены через серию определяющих их категорий.
пример
Хороший пример категориальной переменной соответствует последствиям данного заболевания, которые можно разделить на выздоровление, хроническое заболевание или смерть.
-Активная переменная
Переменная, которой манипулирует исследователь.
-Двоичная переменная
Переменная, которая может принимать только два значения, обычно 0/1. Это также может быть да / нет, высокий / короткий или другая комбинация двух переменных.
-Переменная ковариата
Подобно независимой переменной, он влияет на зависимую переменную, но обычно не является интересующей переменной.
-Критериальная переменная
Другое название зависимой переменной, когда переменная используется в неэкспериментальных ситуациях.
-Эндогенная переменная
Подобно зависимым переменным, на них влияют другие переменные в системе. Используется почти исключительно в эконометрике.
-Экзогенная переменная
Переменные, которые влияют на других, и которые поступают извне.
-Идентификация переменных
Переменные, используемые для однозначной идентификации ситуаций.
-Переменная вмешательства
Переменная, которая используется для объяснения взаимосвязи между переменными.
-Скрытая переменная
Скрытая переменная, которую нельзя напрямую измерить или наблюдать.
-Переменные манифесты
Переменная, которую можно непосредственно наблюдать или измерять.
-Переменная-посредник или промежуточная переменная
Переменные, объясняющие, как происходит взаимосвязь между переменными.
-Модерирующая переменная
Изменяет интенсивность эффекта между независимыми и зависимыми переменными. Например, психотерапия может снизить уровень стресса у женщин в большей степени, чем у мужчин, поэтому секс смягчает эффект между психотерапией и уровнями стресса.
-Поликотомические переменные
Переменные, которые могут иметь более двух значений.
-Прогнозная переменная
По смыслу аналогичен независимой переменной, но используется в регрессионных и неэкспериментальных исследованиях.
Читайте также:
- С чем можно сделать хлебцы в школу
- Почему динамическая работа менее утомительна чем статическая кратко
- Что такое ритуал кратко
- Обязательно ли классное руководство в школе
- Что такое цивилизация как объяснялось это понятие философами прошлого кратко
