Андрей Геннадьевич Блохин
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Сущность понятия «центр масс»
Понятие “центр масс” широко используется в физике для решения задач, связанных с движением тел. Например, математический маятник удобно представить себе как подвешенное на нити тело, вся масса которого сконцентрирована в единой точке. В законе всемирного тяготения тоже речь идет о расстоянии не между телами, а между центрами тел, под каковыми подразумеваются именно центры масс, а не геометрические центры.
Определение 1
Центр масс – точка, характеризующая размещение и движение исследуемой системы как единого целого.
Признаком центра масс является то, что если тело подвесить, закрепив за эту точку, оно останется в покое, т.е. не будет раскачиваться или вращаться относительно этого центра. В простейшем случае, если речь идет о симметричном теле с равномерной плотностью, центр масс находится на пересечении осей симметрии рассматриваемого тела. Например, если взять линейку длиной 30 см, то ее центр масс будет расположен на отметке “15 см”. Подложив карандаш под эту отметку, легко привести линейку в положение равновесия.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
На практике далеко не все тела, центр масс которых нужно найти, являются симметричными и однородными по плотности. Более того, многие исследуемые объекты представляют собой системы из нескольких тел с различными геометрическими и химическими характеристиками. Для расчетов их разбивают на элементарные фрагменты и производят вычисления поэтапно.
Нахождение координат центра масс
Определение 2
Центр масс двух тел с точечными массами $m_1$ и $m_2$ и координатами на координатной прямой $x_1$ и $x_2$ находится в точке, делящей расстояние между этими телами на отрезки с длинами обратно пропорциональными массам рассматриваемых тел.
Отсюда следует, что чем массивнее тело в такой элементарной системе, тем ближе оно к общему центру масс.
Расстояние между точечными телами равно:
$Delta x = x_2 – x_1$
Пропорция между массами и расстояниями, согласно определению:
$frac{l_1}{l_2} = frac{m_2}{m_1}$,
«Как найти координаты центра масс» 👇
где $l_1$, $l_2$ – расстояния от соответствующих тел до центра масс.
Выразив, длины через координаты
$l_1 = x_c – x_1; l_2 = x_2 – x_c$,
центр масс можно определить как
$x_c = frac{m_1 cdot x_1 + m_2 cdot x_2}{m_1 + m_2}$.
где $x_c$ – координата центра тяжести.
Разложив любую сложную систему на множество элементарных тел с точечными массами, можно обобщить изложенный принцип в виде формулы (для оси абсцисс):
$x_c = frac{sumlimits^N_{i=1}{m_i cdot x_i}}{sumlimits^N_{i=1}{m_i}}$
В большинстве случаев центр масс требуется найти не на координатной прямой, а в двух- или трехмерной системе координат. Для дополнительных осей координаты центра масс ($y_c$, $z_c$) находят по аналогичному принципу.
Замечание 1
Центр тяжести системы тел представляет собой точку, подобную центру масс, но рассчитывается не для масс, а для весов (обусловленных гравитацией сил), действующих на точечные тела, входящие в систему. Центр тяжести определяется так же, как и центр масс, если размеры системы малы в сравнении с радиусом планеты Земля. Он в большинстве случаев с достаточной для практики точностью совпадает с центром масс рассматриваемой системы.
Пример 1
Найти центр масс двух линеек, изготовленных из одинакового материала, одинаковой толщины и ширины, левые концы линеек совмещены. Длины линеек – 10 и 30 см. Толщиной линеек можно пренебречь.
Поскольку толщиной можно пренебречь, найти нужно лишь координату центра масс по оси $x$.
Разобьем мысленно систему на два отрезка. Первый – где толщина линеек складывается. Его координаты – $[0, 10]$. Второй отрезок – где длинная линейка продолжается одна. Его координаты – $[10, 30]$. Примем за единицу измерения массу одного погонного сантиметра линейки. Тогда масса второго фрагмента:
$m_2 = 30 – 10 = 20$
На каждый сантиметр первого фрагмента приходится вдвое больше массы, поскольку там сложены две линейки:
$m_1 = 10 cdot 2 = 20$
Центры масс отрезков находятся на их осях симметрии, т.е. на середине длины каждого:
$x_{c1} = frac{10}{2} = 5$;
$x_{c2} = 10 + frac{20}{2} = 20$
Подставим значения в формулу:
$x_c = frac{m_1 cdot x_1 + m_2 cdot x_2}{m_1 + m_2}$
$x_c = frac{20 cdot 5 + 20 cdot 20}{20 +20} = frac{100 + 400}{40} = 12, 5$
Ответ: центр масс находится на расстоянии 12,5 см от левого конца системы линеек.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Центр тяжести (центр масс):
Любое твердое тело можно представить как состоящее из множества материальных точек, на каждую из которых действует сила тяжести.
Центр тяжести – геометрическая точка абсолютно твердого тела, через которую проходит равнодействующая всех сил тяжести, действующих на данное тело при любом его положении в пространстве.
На каждую точку тела в поле сил тяжести действует сила, а на все тело – равнодействующая этих сил. Точка приложения равнодействующей называется центром тяжести тела.
Центр масс (центр инерции) – точка, характеризующая распределение масс в теле или системе тел. Представляется она как материальная точка, в которой сосредоточена вся масса системы и на которую действуют все приложенные к системе внешние силы.
При определенных условиях положение центра тяжести тела совпадает с положением центра его масс.
Положение центра масс тела в однородном поле тяжести совпадает с положением его центра тяжести.
При небольших размерах тел возле поверхности Земли поле сил тяжести можно считать однородным, а силы, действующие на каждую точку тела, – параллельными.
Чтобы сила тяжести не вызывала движения, необходимо соблюдать определенные условия.
Положение центра масс тела в однородном поле тяжести | совпадает с положением его центра тяжести.
Если тело закреплено в одной точке, например подвешено или лежит на опоре и пребывает в покое, то центр тяжести и точка опоры лежат на одной вертикали: сила тяжести, действующая на тело, уравновешивается реакцией точки опоры.
Если тело закреплено в одной точке (подвешено или лежит на опоре) и пребывает в покое, то центр тяжести и точка опоры лежат на одной вертикали.
Рассмотрим примеры определения центра тяжести (центра масс) тел правильной несложной геометрической формы.
1. Найдем центр тяжести однородного стержня (рис. 2.48). Разделим стержень на несколько одинаковых небольших объемов (в нашем случае на пять слева и справа от середины стержня). Если добавить две параллельные силы, которые действуют на объемы 1 и 1′, то их равнодействующая будет расположена в точке О – середине стержня.
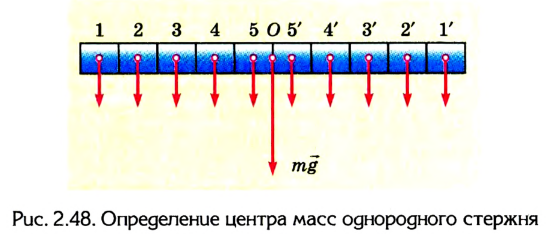
Аналогично и для пар сил 2-2′, 3-3′ и т. д. На основании этого можно сделать вывод: центр тяжести однородного стержня 99 расположен в точке О — середине стержня.
Центр тяжести однородного стержня расположен в середине стержня.
2. Пользуясь рассмотренным выше приемом, можно установить, что центр тяжести однородного круга совпадает с его центром (рис. 2.49).
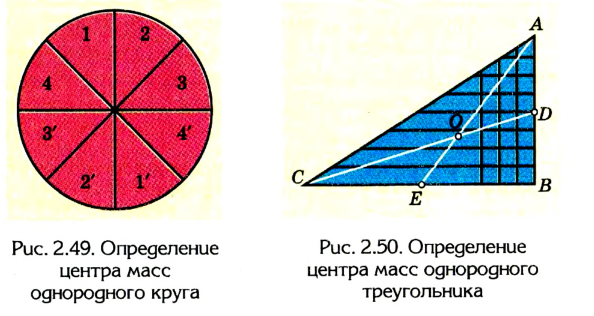
Таким образом, в однородных телах, имеющих центр симметрии (прямоугольник или круглая пластинка, шар, цилиндр и т. д.), центр тяжести совпадает с центром симметрии. Центр тяжести может находиться и вне тела, например у кольца или спичечной коробки, мяча или пустого стакана.
Центр тяжести однородного круга совпадает с его центром.
Центр тяжести однородного треугольника находится в точке пересечения его медиан.
3. Найдем центр тяжести однородного треугольника (рис. 2.50), представим, что вся площадь треугольника поделена на узкие поло-
сы, параллельные любой из сторон треугольника, например АВ. Центр тяжести каждой такой полосы, как однородного стержня, находится в ее середине. Центр тяжести всего треугольника лежит где-то на медиане CD, которая проходит через середины всех отрезков, параллельных стороне АВ.
Если поделить треугольник на отрезки, параллельные стороне СВ, то с учетом предыдущих вычислений можно сделать вывод: центр тяжести треугольника будет лежать на медиане АЕ. На обеих медианах центр тяжести может лежать лишь в том случае, если он совпадает с точкой их пересечения О.
4. Чтобы найти центр тяжести плоской фигуры, надо ее подвесить за какую-нибудь точку 1; тогда фигура развернется так, что ее центр тяжести окажется на вертикали, которая проходит через точку подвеса (рис. 2.51).
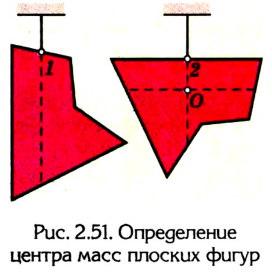
Отметив направление этой вертикали, подвесим фигуру за другую точку 2. И в этом случае фигура развернется так, чтобы центр тяжести находился на вертикали, проходящей через новую точку подвеса. Отметим направление и этой вертикали.
Центр тяжести плоской фигуры расположен в точке О пересечения вертикалей, проведенных через две любые точки подвеса.
Когда нужно определить центр сил тяжести сложных фигур, необходимо исходить из того, что сила тяжести равна сумме сил тяжести частей тела и всегда приложена к центру этих сил.
- Заказать решение задач по физике
Центр тяжести тела и центр масс тела
Когда мы рассматривали опыты с подвешенными телами, находящимися в равновесии, точка приложения сил натяжения была нам известна. А где приложена сила тяжести? В какой точке? Из этих опытов следует только то, что точка приложения силы тяжести при равновесии лежит на линии действия силы натяжения подвеса. Но это позволяет решить задачу о нахождении точки приложения силы тяжести экспериментальным путем. Если подвешивать плоское тело в разных точках (рис. 151), то линии действия сил натяжения пересекутся в одной точке С. Эта точка и будет точкой приложения силы тяжести. Она называется центром тяжести. Подобным образом можно определить положение центра тяжести не только плоского тела, но и любого другого.
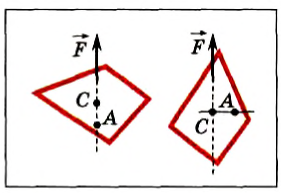
Рис. 151
Очевидно, что положение центра тяжести тел правильной формы можно указать, не выполняя описанный опыт. Так, например, центр тяжести однородного шара находится в его геометрическом центре, поскольку любой диаметр является осью симметрии шара. Центр тяжести круглого диска также находится в его геометрическом центре, как и центр тяжести обруча или кольца, и т. д. Последний пример показывает, что центр тяжести тела может находиться вне тела.
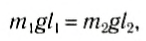
Положение центра тяжести тела можно и вычислить. Предварительно рассмотрим следующий опыт. Пусть тело состоит из двух шаров массами m1 и m2, насаженных на стержень (рис. 152, а). Если масса стержня значительно меньше масс шаров, то ею можно пренебречь. На каждый из шаров действуют силы тяжести, приложенные в их центре тяжести. Для того чтобы система находилась в равновесии, призму надо расположить так, чтобы линия действия силы реакции призмы проходила через центр тяжести этой системы — точку С. В этом случае суммарный момент сил относительно точки C равен нулю, т. е. выполняется условие:
или

Следовательно, центр тяжести делит расстояние между двумя грузами в отношении, обратном отношению их масс. Соотношение (1) можно получить и иначе. Поскольку момент сил тяжести равен нулю, то он должен быть равен нулю и относительно любой горизонтальной оси, проходящей, например, через точку О. Иначе тело вращалось бы вокруг этой оси. Обозначим расстояние между точками C и О через а. Тогда алгебраическая сумма моментов всех сил, действующих на тело, относительно точки О примет вид:

Рис. 152
Поскольку F=(m1 + m2)g, то после несложных преобразований получим соотношение (1). Такой подход позволяет находить положение центра тяжести аналитически.
Направим ось Ox вдоль стержня (рис. 152, б). Выберем начало отсчета в произвольной точке О. тогда координаты точек приложения сил соответственно будут х1, хс и х2. Запишем условие моментов относительно точки О:

Отсюда

При выводе этой формулы было использовано значение силы F = (m1 + m2) g. Таким образом, центр тяжести этой системы тел отстоит от точки О на расстоянии хс, определенном формулой (2).
Напомним, что выражение (2) является следствием правила моментов при равновесии тела, но в правой части отсутствует ускорение свободного падения. В него входят только координаты центра тяжести тел и их массы, поэтому точка, координата которой определяется формулой (2), называется центром масс тела. Следует отметить, что центр масс и центр тяжести совпадают, если тело находится в однородном гравитационном поле.
Понятие центра масс является более общим, чем понятие центра тяжести. Центр масс является характеристикой тела или системы тел, важной не только для задач, где речь идет о силе тяжести, но и для решения других физических проблем.
Если произвольное тело можно разбить на n элементов, массы которых m1, m2…, mn, и если известны координаты центров масс этих элементов x1, x2…, xn относительно выбранной системы координат, то координата центра масс тела вычисляется по формуле:
Естественно, что такие же соотношения можно записать и для ус и zc. Для примера вычислим положение центра масс столярного угольника. Он состоит из деревянного бруска 1 и деревянной линейки 2, соединенных под прямым углом (рис. 153). Положим, что масса бруска 1 в два раза больше массы линейки (m1 = 2m2). Так как линейка и брусок — однородные параллелепипеды, то центры масс находятся в их геометрических центрах. Очевидно, что центр масс угольника находится где-то на линии, соединяющей центры масс бруска (C1) и линейки (C2).
Выберем наиболее оптимальным образом систему координат, как показано на рисунке. Тогда координаты центра масс бруска: х1 = 0, y1 = , а координаты центра масс линейки:
, а координаты центра масс линейки:  , y2 = 0 .
, y2 = 0 .
По формуле (3): .
Таким образом, центр масс угольника находится вне тела.
Главные выводы:
- Центр тяжести — точка, в которой приложена сила тяжести.
- Центр масс симметричных однородных тел находится в их геометрическом центре.
- Координаты центра масс тела можно вычислить по формуле (3).
- Импульс тела в физике
- Замкнутая система в физике
- Реактивное движение в физике
- Освоение космоса – история, этапы и достижения с фотографиями
- Международная система единиц СИ
- Математика – язык физики
- Законы Ньютона в физике
- Гравитационные силы в физике
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 26 июля 2022 года; проверки требуют 3 правки.
Центр масс (тж. центр ине́рции) — геометрическая точка, положение которой определяется распределением массы в теле, а перемещение характеризует движение тела или механической системы как целого[1]. Радиус-вектор данной точки задаётся формулой

где  — зависящая от координат плотность, а интегрирование осуществляется по объёму тела. Центр масс может оказаться как внутри, так и вне тела.
— зависящая от координат плотность, а интегрирование осуществляется по объёму тела. Центр масс может оказаться как внутри, так и вне тела.
Использование понятия центра масс, а также системы координат, связанной с центром масс, удобно во многих приложениях механики и упрощает расчёты. Если на механическую систему не действуют внешние силы, то её центр масс движется с постоянной по величине и направлению скоростью.
Джованни Чева применял рассмотрение центров масс к решению геометрических задач, в результате были сформулированы теоремы Менелая и теоремы Чевы[2].
В случае систем материальных точек и тел в однородном гравитационном поле центр масс совпадает с центром тяжести, хотя в общем случае это разные понятия.
Центр масс в классической механике[править | править код]
Определение[править | править код]
Положение центра масс (центра инерции) системы материальных точек в классической механике определяется следующим образом[3]:

где  — радиус-вектор центра масс,
— радиус-вектор центра масс,  — радиус-вектор i-й точки системы,
— радиус-вектор i-й точки системы,  — масса i-й точки.
— масса i-й точки.
Для случая непрерывного распределения масс:


где  — суммарная масса системы,
— суммарная масса системы,  — объём,
— объём,  — плотность.
— плотность.
Центр масс, таким образом, характеризует распределение массы по телу или системе частиц.
Если система состоит не из материальных точек, а из протяжённых тел с массами  , то радиус-вектор центра масс такой системы
, то радиус-вектор центра масс такой системы  связан с радиус-векторами центров масс тел
связан с радиус-векторами центров масс тел  соотношением[4]:
соотношением[4]:

Действительно, пусть даны несколько систем материальных точек с массами  Радиус-вектор
Радиус-вектор 
 -ной системы:
-ной системы:


При переходе к протяженным телам с непрерывным распределением плотности в формулах будут интегралы вместо сумм, что даст тот же результат.
Иначе говоря, в случае протяжённых тел справедлива формула, по своей структуре совпадающая с той, что используется для материальных точек.
Примеры[править | править код]
- Центры масс плоских однородных фигур
- У отрезка — середина.
- У многоугольников :
- У параллелограмма — точка пересечения диагоналей.
- У треугольника — точка пересечения медиан (центроид).
- У правильного многоугольника — центр поворотной симметрии.
- У полукруга — точка, делящая перпендикулярный радиус в отношении
 от центра круга.
от центра круга.

Координаты центра масс однородной плоской фигуры можно вычислить по формулам (следствие из теорем Паппа — Гульдина):
- и , где — объём тела, полученного вращением фигуры вокруг соответствующей оси, — площадь фигуры.




- Центры масс периметров однородных фигур
- Центр масс сторон треугольника находится в центре вписанной окружности дополнительного треугольника (треугольника с вершинами, расположенными в серединах сторон данного треугольника). Эту точку называют центром Шпикера. Это означает то, что если стороны треугольника сделать из тонкой проволоки одинакового сечения, то центр масс (барицентр) полученной системы будет совпадать с центром вписанной окружности дополнительного треугольника или с центром Шпикера.
Использование[править | править код]
Понятие центра масс широко используется в физике, в частности, в механике.
Движение твёрдого тела можно рассматривать как суперпозицию движения центра масс и вращательного движения тела вокруг его центра масс. Центр масс при этом движется так же, как двигалось бы тело с такой же массой, но бесконечно малыми размерами (материальная точка). Последнее означает, в частности, что для описания этого движения применимы все законы Ньютона. Во многих случаях можно вообще не учитывать размеры и форму тела и рассматривать только движение его центра масс.
Часто бывает удобно рассматривать движение замкнутой системы в системе отсчёта, связанной с центром масс. Такая система отсчёта называется системой центра масс (Ц-система), или системой центра инерции. В ней полный импульс замкнутой системы всегда остаётся равным нулю, что позволяет упростить уравнения её движения.
Центр масс в релятивистской механике[править | править код]
В случае высоких скоростей (порядка скорости света) (например, в физике элементарных частиц) для описания динамики системы применяется аппарат СТО. В релятивистской механике (СТО) понятия центра масс и системы центра масс также являются важнейшими понятиями, однако, определение понятия меняется:

где — радиус-вектор центра масс, — радиус-вектор i-й частицы системы,  — полная энергия i-й частицы.
— полная энергия i-й частицы.
Данное определение относится только к системам невзаимодействующих частиц. В случае взаимодействующих частиц в определении должны в явном виде учитываться импульс и энергия поля, создаваемого частицами[5].
Во избежание ошибок следует понимать, что в СТО центр масс характеризуется не распределением массы, а распределением энергии. В курсе теоретической физики Ландау и Лифшица предпочтение отдается термину «центр инерции». В западной литературе по элементарным частицам применяется термин «центр масс» (англ. center-of-mass): оба термина эквивалентны.
Скорость центра масс в релятивистской механике можно найти по формуле:

Смежные понятия[править | править код]
Центр масс vs. барицентр[править | править код]
Движение космических тел вокруг барицентра.
Термин «центр масс» синонимичен одному из значений понятия барицентр (от др.-греч. βαρύς — тяжёлый + κέντρον — центр), однако последнее применяется преимущественно в задачах астрофизики и небесной механики. Под барицентром подразумевается общий для нескольких небесных тел центр масс, вокруг которого эти тела движутся. Примером может выступить совместное движение планеты и звезды (см. рис.) или компонент двойных звёзд. Центр масс (барицентр) в таком случае находится на отрезке длины  , соединяющем тела массами
, соединяющем тела массами  и
и  , на удалении
, на удалении  от тела .
от тела .
Другое значение слова барицентр относится, скорее, к геометрии, нежели к физике; в этом значении выражение для координаты барицентра отличается от формулы для центра масс отсутствием плотности (как если бы всегда было  const).
const).
Центр масс vs. центр тяжести[править | править код]
Центр тяжести (в данном случае = центр масс), демонстрация
Центр масс тела не следует путать с центром тяжести.
Центром тяжести механической системы называется точка, относительно которой суммарный момент сил тяжести (действующих на систему) равен нулю. Например, в системе, состоящей из двух одинаковых масс, соединённых несгибаемым стержнем, и помещённой в неоднородное гравитационное поле (например, планеты), центр масс будет находиться в середине стержня, в то время как центр тяжести системы будет смещён к тому концу стержня, который находится ближе к планете (ибо вес P = m·g зависит от параметра гравитационного поля g), и, вообще говоря, даже расположен вне стержня.
В однородном гравитационном поле центр тяжести всегда совпадает с центром масс. В некосмических задачах гравитационное поле обычно может считаться постоянным в пределах объёма тела, поэтому на практике эти два центра почти совпадают.
По этой же причине понятия центр масс и центр тяжести совпадают при использовании этих терминов в геометрии, статике и тому подобных областях, где применение его по сравнению с физикой можно назвать метафорическим и где неявно предполагается ситуация их эквивалентности (поскольку реального гравитационного поля нет, то и учёт его неоднородности не имеет смысла). В этих применениях традиционно оба термина синонимичны, и нередко второй предпочитается просто в силу того, что он более старый.
См. также[править | править код]
- Классическая механика
- Теоретическая механика
- Теорема о движении центра масс системы
- Неваляшка
- Барицентр
- Центроид треугольника
Примечания[править | править код]
- ↑ Тарг С. М. Центр инерции (центр масс) // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Большая российская энциклопедия, 1999. — Т. 5: Стробоскопические приборы — Яркость. — С. 624—625. — 692 с. — 20 000 экз. — ISBN 5-85270-101-7.
- ↑ G. Ceva, De lineis rectis se invicem secantibus, statica constructio Milan, 1678
- ↑ Журавлёв, 2001, с. 66.
- ↑ Фейнман Р., Лейтон Р., Сэндс М. Выпуск 2. Пространство. Время. Движение // Фейнмановские лекции по физике. — М.: Мир, 1965. — 164 с. — С. 68.
- ↑ Ландау Л. Д., Лифшиц Е. М. Теория поля. — Издание 7-е, исправленное. — М.: Наука, 1988. — 512 с. — («Теоретическая физика», том II). — ISBN 5-02-014420-7.
Литература[править | править код]
- Бобылёв Д. К. Центр, в физике // Энциклопедический словарь Брокгауза и Ефрона : в 86 т. (82 т. и 4 доп.). — СПб., 1890—1907.
- Журавлёв В. Ф. Основы теоретической механики. 2-е изд. — М.: Физматлит, 2001. — 320 с. — ISBN 5-94052-041-3..
Определение центра масс, теория и онлайн калькуляторы
Определение центра масс
При исследовании поведения систем частиц, часто удобно использовать для описания движения такую точку, которая характеризует положение и движение рассматриваемой системы как единого целого. Такой точкой служит центр масс.
Для однородных тел обладающих симметрией центр масс часто совпадает с геометрическим центром тела. В однородном изотропном теле одной выделенной точке найдется симметричная ей точка.
Радиус-вектор и координаты центра масс
Предположим, что у нас имеются две частицы с равными массами, им соответствуют радиус-векторы: ${overline{r}}_1 и {overline{r}}_2$ . В этом случае центр масс расположен посередине между частицами. Центр масс (точка C) определён радиус-вектором ${overline{r}}_C$ (рис.1).
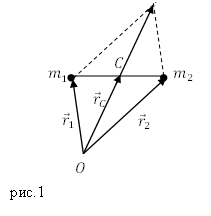
Из рис.1 видно, что:
[{overline{r}}_C=frac{{overline{r}}_1+ {overline{r}}_2}{2}left(1right).]
Можно ожидать, что вместе с геометрическим центром системы радиус-вектор, которого равен ${overline{r}}_C,$ играет роль точка, положение которой определяет распределение массы. Ее определяют так, чтобы вклад каждой частицы был пропорционален ее массе:
[{overline{r}}_C=frac{{overline{r}}_1m_1+ {overline{r}}_2m_2}{m_1+m_2}left(2right).]
Радиус -вектор ${overline{r}}_C$, определенный выражением (2) – средне взвешенная величина радиус-векторов частиц ${overline{r}}_1$ и ${overline{r}}_2$. Это становится очевидным, если формулу (2) представить в виде:
[{overline{r}}_C=frac{m_1}{m_1+m_2}{overline{r}}_1+frac{m_2}{m_1+m_2}{overline{r}}_2left(3right).]
Выражение (3) показывает, что радиус-вектор каждой частицы входит в ${overline{r}}_C$ с весом, который пропорционален его массе.
Выражение (3) легко обобщается для множества материальных точек, которые расположены произвольным образом.
Если положения N материальных точек системы задано при помощи их радиус-векторов, то радиус – вектор, определяющий положение центра масс находим как:
[{overline{r}}_c=frac{sumlimits^N_{i=1}{m_i{overline{r}}_i}}{sumlimits^N_{i=1}{m_i}}left(4right).]
Выражение (4) считают определением центра масс системы.
При этом абсцисса центра масс равна:
[x_c=frac{sumlimits^N_{i=1}{m_ix_i}}{sumlimits^N_{i=1}{m_i}}left(5right).]
Ордината ($y_c$) центра масс и его аппликата ($z_c$):
[y_c=frac{sumlimits^N_{i=1}{m_iy_i}}{sumlimits^N_{i=1}{m_i}}left(6right).]
[z_c=frac{sumlimits^N_{i=1}{m_iz_i}}{sumlimits^N_{i=1}{m_i}}left(7right).]
Формулы (4-7) совпадают с формулами, которые используют для определения тяжести тела. В том случае, если размеры тела малы в сравнении с расстоянием до центра Земли, центр тяжести считают совпадающим с центром масс тела. В большинстве задач центр тяжести совпадает с центром масс тела.
Скорость центра масс
Выражение для скорости центра масс (${overline{v}}_c=frac{d{overline{r}}_c}{dt}$) запишем как:
[{overline{v}}_c=frac{m_1{overline{v}}_1+m_2{overline{v}}_2+dots +m_n{overline{v}}_n}{m_1+m_2+dots +m_n}=frac{overline{P}}{M}left(8right),]
где $overline{P}$ – суммарный импульс системы частиц; $M$ масса системы. Выражение (8) справедливо при движениях со скоростями которые существенно меньше скорости света.
Если система частиц является замкнутой, то сумма импульсов ее частей не изменяется. Следовательно, скорость центра масс при этом величина постоянная. Говорят, что центр масс замкнутой системы перемещается по инерции, то есть прямолинейно и равномерно, и это движение не зависимо от движения составных частей системы. В замкнутой системе могут действовать внутренние силы, в результате их действия части системы могут иметь ускорения. Но это не оказывает влияния на движение центра масс. Под действием внутренних сил скорость центра масс не изменяется.
Примеры задач на определение центра масс
Пример 2
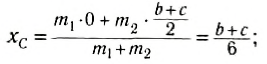
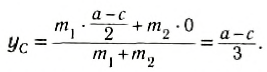
Задание. Система составлена из материальных точек (рис.2), запишите координаты ее центра масс?
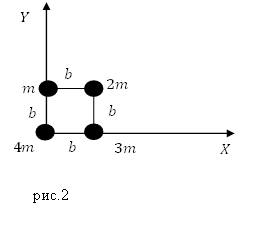
Решение. Рассмотрим рис.2. Центр масс системы лежит на плоскости, значит, у него две координаты ($x_c,y_c$). Найдем их используя формулы:
[left{ begin{array}{c}
x_c=frac{sumlimits_i{Delta m_ix_i}}{m};; \
y_с=frac{sumlimits_i{Delta m_iy_i}}{m}. end{array}
right.]
Вычислим массу рассматриваемой системы точек:
[m=m+2m+3m+4m=10 m.]
Тогда абсцисса центра масс $x_{c } $равна:
[x_c=frac{0cdot 4m+3mcdot b+2mcdot b}{10m}=0,5 b.]
Ордината $y_с$:
[y_с=frac{0cdot m+mcdot b+2mcdot b}{10m}=0,3 b.]
Ответ. $x_c=0,5 b$; $y_с=0,3 b$
Пример 2
Задание. Космонавт, имеющий массу $m$, неподвижен относительно корабля массы $M$. Двигатель космического аппарата выключен. Человек начинает подтягиваться к кораблю при помощи легкого троса. Какое расстояние пройдет космонавт ($s_1$), какое корабль ($s_2$) до точки встречи? В начальный момент расстояние между ними равно $s$.
Решение. Центр масс корабля и космонавта лежит на прямой, соединяющей эти объекты.
В космосе, где внешние силы отсутствуют, центр масс замкнутой системы (корабль-космонавт) либо покоится, либо движется с постоянной скоростью. В избранной нами (инерциальной) системе отсчета он покоится. При этом:
[frac{s_1}{s_2}=frac{m_2}{m_1}left(2.1right).]
По условию:
[s=s_1+s_2left(2.2right).]
Из уравнений (2.1) и (2.2) получаем:
[s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}.]
Ответ. $s_1=sfrac{m_2}{m_1+m_2};; s_2=sfrac{m_1}{m_1+m_2}$
Читать дальше: период и частота колебаний.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Это некоторое положение, определяемое относительно объекта или системы объектов. Это среднее положение всех частей системы, взвешенное в соответствии с их массами.
Для простых жестких объектов с равномерной плотностью центр масс находится в центре тяжести. Например, центр масс однородной формы диска будет в его центре. Иногда центр масс не находится в объекте. Например, центр масс кольца находится в его центре, где нет материала самого кольца.
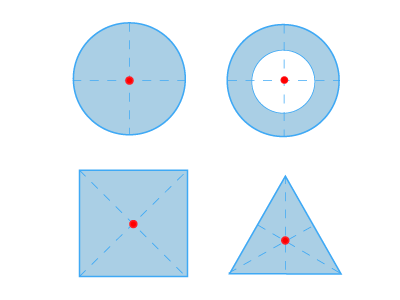
Рисунок 1. Центр масс для некоторых простых геометрических фигур (обозначен красными точками).
Для более сложных фигур нужно более общее математическое определение:
Это уникальная позиция, в которой взвешенные векторы позиций всех частей системы суммируются до нуля.
Что полезного в центре масс?
Интересная вещь о центре масс объекта или системы состоит в том, что это точка, где действует любая однородная сила на объект. Это очень важно, потому что понимание этого облегчает решение механических задач, в которых мы должны описывать движение объектов разной формы и сложных систем.
Для расчетов мы можем рассматривать объект необычной формы, как если бы вся его масса была сосредоточена в крошечном объекте, расположенном в центре масс. Мы иногда называем этот воображаемый объект точечной массой.
Если мы нажимаем на твердый объект в его центре масс, то объект всегда будет двигаться, как будто это точечная масса. Он не будет вращаться вокруг любой оси, независимо от его фактической формы. Если объект подвергается неуравновешенной силе в какой-то другой точке, он начнет вращаться вокруг центра масс.
Как можно найти центр масс любого объекта или системы?
В общем, центр масс может быть найден путем сложения взвешенных векторов положения, которые указывают на центр масс каждого объекта в системе. Один из быстрых методов, который позволяет избежать использования векторной арифметики является нахождение центра масс отдельно для компонентов вдоль каждой оси. То есть:
Для положений объекта вдоль оси x:
ЦМx =m1x1+m2x2+m3x3 m1+m2+m3ЦМ_x;=frac{m_1x_1+m_2x_2+m_3x_3;}{m_1+m_2+m_3}
И аналогично для оси у:
ЦМy =m1y1+m2y2+m3y3 m1+m2+m3ЦМ_y;=frac{m_1y_1+m_2y_2+m_3y_3;}{m_1+m_2+m_3}
Вместе они дают полные координаты (Цмx, Цмy) центра масс системы. Например, рассмотрим систему из трех плоских объектов одинаковой плотности, показанную на рисунке 2.
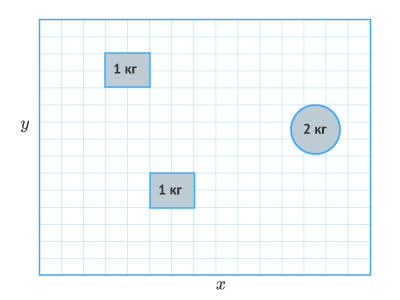
Рисунок 2. Система из трех плоских объектов.
Расположение центра масс по оси х:
1⋅4+1⋅6+2⋅12 1+1+2=8,5frac{1cdot4+1cdot6+2cdot12;}{1+1+2}=8,5
и по оси y:
1⋅5+1⋅12+2⋅8,5 1+1+2=8,5frac{1cdot5+1cdot12+2cdot8,5;}{1+1+2}=8,5
Сложные объекты часто могут быть представлены в виде наборов простых форм, каждый из которых имеет одинаковую массу. Затем мы можем представить форму каждого компонента в виде точечной массы, расположенной в центре тяжести. Пустоты внутри объектов можно даже объяснить, представив их в виде фигур с отрицательной массой.
Рассмотрим плоский объект неправильной формы с равномерной плотностью, показанный на рисунке 3.
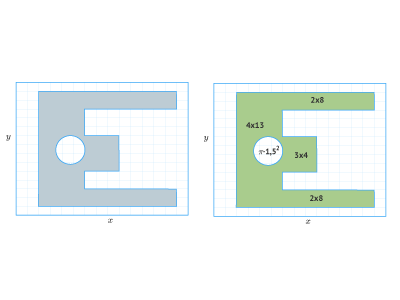
Рисунок 3. Плоский объект неправильной формы. Объект делится на простые формы.
Мы можем разбить этот сложный объект на четыре прямоугольника и один круг, как показано на рисунке справа. Здесь нас интересует только положение центра масс в относительных единицах, показанных на рисунке. Материал имеет однородную плотность, поэтому масса пропорциональна площади. Для простоты мы можем представить массу каждого сечения в единицах «квадратов», как показано на диаграмме.
По х оси, центр масс находится в:
16⋅10+52⋅4+12⋅7,5+16⋅10+(−7,1)⋅4,5 16+52+12+16−7,1=6,6frac{16cdot10+52cdot4+12cdot7,5+16cdot10+(-7,1)cdot4,5;}{16+52+12+16-7,1}=6,6
Важно, что площадь круговой пустоты π⋅1,52π·1,52 ∼7,1sim7,1 учитывается как отрицательная масса.
По y оси, центр масс находится в:
16⋅13+52⋅7,5+12⋅7,0+16⋅2+(−7,1)⋅7,5 16+52+12+16−7,1=7,4frac{16cdot13+52cdot7,5+12cdot7,0+16cdot2+(-7,1)cdot7,5;}{16+52+12+16-7,1}=7,4
Продолжение статьи читайте здесь.
