как найти дельту m если m = 280г.
—>

дельта m =m1-m2
должно быть еще одно значение
1)нужно найти цену деления весов
2)затем делишь цену деления на 2 и тем самым находишь погрешность т. е. дельту
3) в ответе пишешь : m= 280г +- погрешность
вот и все все просто
Дельта — буква, знак и его происхождение, применение в науке
В данной статье поговорим о знаке Дельта — что он из себя представляет, в каких сферах применяется и для чего вообще используется. Также вы узнаете, как выглядит знак и как его можно вставить в текст в такой программе, какой является Ворд из Майкрософт Оффис.
Знак Дельта применяется во многих сферах жизнедеятельности, к примеру, в физике, текстовых редакторах, формулах и других сферах. Чаще всего именно при печати учебной литературы, докладов и других видов документов применяют знак дельта, который имеется в разных версиях ВОРД от Виндовс и других приложениях для создания документов текстового формата на ПК.

О происхождения знака
Появление символа связано с греческими языком, но сама буква появилась от стародревнего финийского языка, в котором именовалась – далет, что обозначало («вход в дверь»). Выглядела «далет» как перевернутый влево равнобедренный треугольник. В греческом алфавите, была такая буква. Позже эта буква дала начало всем известной буквы латинского набора – D , которая и поныне есть во многих алфавитных рядах разных государств мира, к примеру, английский алфавит ее содержит.
Буква, которая служит аналогом в русском алфавите – Д, а вот символ везде одинаков и изображается, как геометрическая фигура, а именно треугольник с равными сторонами (Δ). Эта версия является заглавной, прописная версия выглядит немного иначе, представляя собой кружок с хвостиком, похожий на обозначение в физике плотности (δ).

Где применяется данный символ?
Кроме использования в правописании греков, символ начали активно применять в математике, геометрии, алгебре, физике, химии и географии.
Поговорим отдельно о применении дельта в каждых научных сферах:
- География. Дельта подразумевает в географическом смысле начальную часть реки, океана или моря, имеет смысловое, нежели символическое, буквенное понятие и восприятие. Почему именно область впадения реки принято так называть? Все просто, дело в форме данной области, если сделать снимок сверху, то отток реки будет иметь форму правильного треугольника, а символ дельта, как раз представляет собой такой геометрический объект. Ярчайшим представителем с выраженной дельтой является река Нил (Египет), которая впадает в Средиземное море, а также Амазонка с ее впадением в океан Атлантики.
- Применение в математике, алгебре, геометрии. Очень часто знак применяют в математической сфере для таких целей, как: 1) Приращение аргумента подразумевает под дельтой измененную переменную. К примеру, сложим 5 и 4 в итоге получим число 9. Дельтой будет являться увеличение 5 на 4. 2) Применение в теории вероятности по системе Лапласа. Такой метод преподают в ВУЗах, а не школах и в нем используют такой знак. 3) А также символ применяется при обозначении прямой и обратной матриц. 4) Дельта, буква, применяемая в написании формул (как письменным методом, так и через компьютер);
- Также в математике применяют прописную версию дельта. А именно, такой символ обозначает производную от числа. Обозначение выглядит следующим образом — δy/δx. 2) Используется для описания бесконечной функции-дельта. Бесконечная функция возможна, если все значения аргумента равны нулю. 3) При помощи δ еще обозначают символику Кронекера, символ равен всегда 1, при условии того, что все его индексы равны, либо нулевые при заданных условиях.
- Физика, астрономия, космогония. Граничащие меж собой научные дисциплины, все особо важные и по-своему интересные, в каждой из дисциплин можно встретить знак дельта. В физике связь всех производных осуществляется при помощи формул с интеграцией. К примеру, формула скорости, которая выглядит следующим образом — δS к δt , является отношением одной части к другой. В данном случае расстояние, которое преодолел объект, соотносится со временем, затраченном на преодоление. Вторая производная – это ускорение, где тоже важна взаимосвязь одной составляющей формулы к другой. В космологии и астрономии применяют формулы, расчеты с данным символом, только в прописном варианте.

Как ввести в «Ворд»?
Для вставки символа заходим в верхние меню редактора и ищем колонку «Вставка», наводим на колонку курсором мыши без нажатия правой кнопки. Высвечивается несколько наименования разделов, необходимо нажать на «Символ» , где можно путем перелистывания за счет колеса мыши искать необходимый знак, либо в строке поиска выбрать категорию (статистические или математические) и найти знак. Прописной или заглавный символ высветится в рабочей области окна вставки , вам только стоит нажать правой кнопкой мыши «вставить» или «окей».


§2. Законы Ньютона. Импульс или количество движения материальной точки
В основе динамики материальной точки лежат законы (аксиомы) Ньютона. Напомним ключевые определения и законы.
Система отсчёта, в которой любая материальная точка, не взаимодействующая с другими телами (такая точка называется свободной), движется равномерно и прямолинейно или покоится, называется инерциальной.
инерциальные системы отсчёта (ИСО) существуют
в ИСО приращение импульса материальной точки пропорционально силе и происходит по направлению силы:
`Delta vec p = vec F * Delta t` (1)
Импульсом (или количеством движения) материальной точки называют физическую величину, определяемую произведением её массы на вектор скорости в данной системе отсчёта:
`vec p = m * vec v`.
`vec F` — сумма сил, действующих на материальную точку. Величину `vec F * Delta t` называют импульсом силы за время от `t` до `t + Delta t`, в течение которого силу можно считать неизменной по величине и направлению. Величину `Delta vec p = vec p (t + Delta t) — vec p (t)` называют приращением импульса материальной точки за время от `t` до `t + Delta t`. Поэтому второй закон Ньютона для материальной точки можно сформулировать так:
в ИСО приращение импульса материальной точки равно импульсу силы.
Отметим, что при изучении динамики второй закон Ньютона часто формулируют следующим образом:
в ИСО ускорение материальной точки прямо пропорционально сумме сил, действующих на неё, и обратно пропорционально её массе:
`vec a = vec F/m` (2)
Если масса тела остаётся неизменной, то `Delta vec p = Delta (m vec v) = m Delta vec v`, и соотношение (1) принимает вид `m Delta vec v = vec F Delta t`. С учётом `vec a = (Delta vec v)/(Delta t)` приходим к эквивалентности соотношений (1) и (2) в рассматриваемом случае.
В настоящем Задании представлены задачи, для решения которых привлекается второй закон Ньютона (см.(1)), устанавливающий равенство приращений импульса материальной точки и импульса силы.
при взаимодействии двух материальных точек сила `vecF_(12)`, действующая на первую материальную точку со стороны второй, равна по величине и противоположна по направлению силе `vecF_(21)`, действующей со стороны первой материальной точки на вторую:
1) силы возникают парами и имеют одинаковую природу, они приложены к разным материальным точкам,
2) эти силы равны по величине,
3) они действуют вдоль одной прямой в противоположных направлениях.
Заметим, что согласно третьему закону Ньютона обе силы должны быть равны по величине в любой момент времени независимо от движения взаимодействующих тел. Другими словами, если в системе двух взаимодействующих тел изменить положение одного из тел, то это изменение мгновенно скажется на другом теле, как бы далеко оно ни находилось. На самом деле скорость распространения взаимодействий конечная; она не может превзойти скорость света в вакууме. Поэтому третий закон Ньютона имеет определённые пределы применимости. Однако в классической механике при малых скоростях взаимодействующих тел он выполняется с большой точностью.
Второй закон Ньютона (уравнение движения) можно представить в виде теоремы об изменении импульса материальной точки:
Скорость изменения импульса материальной точки в инерциальной системе отсчёта равна сумме сил, действующих на эту точку.
Напомним, что для решения задач динамики материальной точки следует:
привести «моментальную фотографию» движущегося тела, указать приложенные к нему силы;
выбрать инерциальную систему отсчёта;
составить уравнение (3);
перейти к проекциям приращения импульса и сил на те или иные направления;
решить полученную систему.
Рассмотрим характерные примеры.
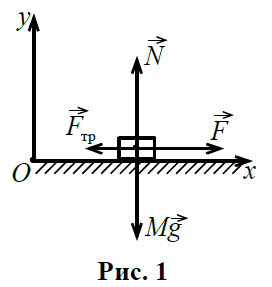
На рис. 1 показаны ИСО и силы, действующие на тело в процессе разгона. По второму закону Ньютона
`(Delta vec p)/(Delta t) = M vec g + vec N + vecF_(«тр») + vec F`.
Переходя к проекциям на горизонтальную ось, находим элементарные приращения импульса в процессе разгона
и в процессе торможения `(F = 0)`
Просуммируем все приращения импульса тела от старта до остановки:
`sum Delta p_x = sum_(0 <= t <= t_1) (F — F_sf»тр») Delta t + sum_(t_1 <= t <= t_1 + t_2) (-F_sf»тр» ) Delta t`.
Напомним, что для любой физической величины сумма приращений равна разности конечного и начального значений. Тогда
Далее рассмотрим пример, в котором одна из сил зависит от времени.
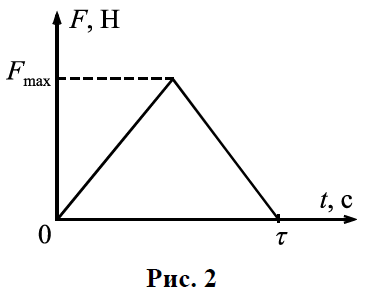
На какое максимальное расстояние `L_max` улетит мяч, если в процессе удара футболист действует на мяч постоянной по направлению силой, величина которой изменяется по закону, представленному на рис. 2. Длительность удара τ = 8 · 10 — 3 c tau=8cdot10^;mathrm c , максимальная сила F max = 3,5 · 10 3 H F_max=3,5cdot10^3;mathrm H , масса мяча m = 0,5 кг m=0,5;mathrm . Здесь и далее ускорение свободного падения g = 10 м / с 2 g=10;mathrm м/mathrm с^2 . Сопротивление воздуха не учитывайте.
Так как `mg < < F_max`, силой тяжести пренебрежём. Из кинематики известно, что максимальная дальность полёта наблюдается при старте под углом `alpha = pi/4`. Процесс удара показан на рис. 3.

По второму закону Ньютона приращение импульса равно импульсу силы `Delta vec p = vec F * Delta t`. Переходя к проекциям приращения импульса и силы на ось `Ox`, получаем
`Delta p_x = F Delta t`.
Просуммируем элементарные приращения импульса мяча за время удара
`sum Delta p_x = mv — 0 = sum_(0 <= t <= tau) F Delta t`.
Импульс силы `sum_(0 <= t <= tau) F(t) Delta t` за время удара численно равен площади под графиком зависимости этой силы от времени (каждое слагаемое `F(t) Delta t` в импульсе силы можно интерпретировать как площадь элементарного прямоугольника со сторонами `F(t)` и `Delta t` на графике зависимости `F(t)`). Тогда импульс силы `F` за время удара равен
`sum_(0 <= t <= tau) F Delta t = (F_max tau)/2`
и в рассматриваемом случае не зависит от того, в какой именно момент времени сила достигает максимального значения (площадь треугольника равна половине произведения основания на высоту!). Далее находим импульс мяча в момент окончания действия силы
`mv = 1/2 F_max * tau`.
Отсюда находим начальную скорость полёта мяча
`v = (F_max * tau)/(2m) = (3,5 * 10^3 * 8 * 10^-3)/(2 * 0,5) = 28 sf»м/с»`
и максимальную дальность (старт под углом `alpha = pi/4`) полёта
`L_max = (v^2)/g = (28^2)/(10)
В рассматриваемом модельном примере получен несколько завышенный по сравнению с наблюдениями результат.
На вступительных испытаниях и олимпиадах в вузах России регулярно предлагаются задачи динамики, в которых наряду с «традиционными» силами: силой тяжести, силой Архимеда и т. д., на тело действует сила лобового сопротивления. Такая сила возникает, например, при движении тел в жидкостях и газах. Вопрос о движении тел в жидкостях и газах имеет большое практическое значение. Знакомство с действием такого рода сил уместно начинать, как это принято в физике, с простейших модельных зависимостей, в которых сила сопротивления принимается пропорциональной скорости или её квадрату.
Мяч, брошенный с горизонтальной поверхности земли под углом `alpha = 60^@` к горизонту со скоростью `v = 10 sf»м/с»`, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на `delta = 30 %` меньшую, чем при бросании. Найдите время полёта мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости.
Согласно второму закону Ньютона приращение импульса пропорционально силе и происходит по направлению силы:
`m * Delta vec v = (m vec g — k vec v) * Delta t`.
Переходя к проекциям сил и приращения скорости на вертикальную ось, получаем
`m * Delta v_y = — mg * Delta t — k * v_y * Delta t`.
Заметим, что элементарное перемещение мяча по вертикали равно `Delta y = v_y * Delta t`, и перепишем последнее соотношение в виде:
`m * Delta v_y = — mg * Delta t — k * Delta y`.
Просуммируем все приращения вертикальной проекции импульса по всему времени полёта, т. е. от `t = 0` до `t = T`:
`m * (sum Delta v_y) = — mg * (sum Delta t) — k* (sum Delta y)`.
Переходя к конечным приращениям, получаем
`m (v_y (T) — v_y (0)) = — mg (T — 0) — k (y (T) — y (0))`.
Точки старта и финиша находятся в одной горизонтальной плоскости, поэтому перемещение мяча по вертикали за время полёта нулевое
Тогда `- (1 — delta) mv_0 sin alpha — mv_0 sin alpha = — mgT`. Отсюда находим продолжительность полёта мяча:
`T = (v_0 sin alpha)/(g) (2 — delta) = (10 * sin 60^@)/(10) (2,0 — 0,3)
В следующем примере рассматривается удар, в ходе которого две очень большие силы, «согласованно» действуют во взаимно перпендикулярных направлениях.
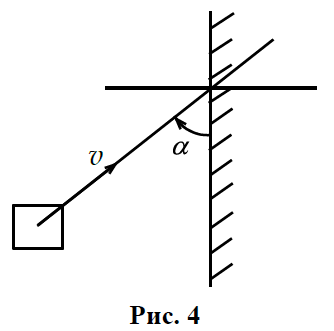
Кубик, движущийся поступательно со скоростью `v` (рис. 4) по гладкой горизонтальной поверхности, испытывает соударение с шероховатой вертикальной стенкой.
Коэффициент трения `mu` скольжения кубика по стенке и угол `alpha` известны. Одна из граней кубика параллельна стенке. Под каким углом `beta` кубик отскочит от стенки? Считайте, что перпендикулярная стенке составляющая скорости кубика в результате соударения не изменяется по величине.
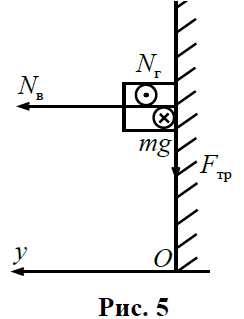
Силы, действующие на кубик в процессе соударения, показаны на рис. 5.
По второму закону Ньютона
`Delta vec p = (m vec g + vecN_(«г») + vecF_(«тр») + vecN_(«в») ) * Delta t`.
Переходя к проекциям на горизонтальные оси `Ox` и `Oy`, получаем
`Delta p_x = — F_sf»тр» Delta t`, `Delta p_y = N_sf»в» Delta t`.
Просуммируем приращения `Delta p_y = N_sf»в» Delta t` по всему времени `tau` соударения, получим:
`sum Delta p_y = p_y (tau) — p_y (0) = mv sin alpha — (- mv sin alpha) = sum_(0 <= t <= tau) N_sf»в» Delta t`.
В процессе удара в любой момент времени `F_sf»тр» = mu N_sf»в»`, следовательно, во столько же раз отличаются импульсы этих сил за время соударения
`sum_(0 <= t <= tau) F_sf»тр» Delta t = mu sum_(0 <= t <= tau) N_sf»в» Delta t = mu 2 mv sin alpha`.
Тогда легко вычислить проекцию `v_x (tau)` скорости кубика после соударения. Для этого просуммируем приращения
`Delta p_x = — F_sf»тр» Delta t = — mu N_sf»в» Delta t`
по всему времени `tau` соударения, получим:
`sum Delta p_x = p_x (tau) — p_x (0) = mv_x (tau) — mv cos alpha = — sum _(0 <= t<= tau) F_sf»тр» Delta t =- mu 2 mv sin alpha`.
Отсюда `v_x (tau) = v (cos alpha — 2 mu sin alpha)`. Далее, считая `v_x (tau) > 0`, получаем
`bbb»tg» beta = (v_y (tau))/(v_x (tau)) = (sin alpha)/(cos alpha — 2 mu sin alpha)`.
Илья Остроух
Ученик
(169),
на голосовании
10 лет назад
Дополнен 10 лет назад
это физика, нужно для нахождения абсолютной ошибки!!
Дополнен 10 лет назад
–>
Дополнен 10 лет назад

Голосование за лучший ответ
Михаил Анатольевич
Гуру
(2850)
10 лет назад
дельта m =m1-m2
должно быть еще одно значение
Максим Кудырко
Знаток
(272)
10 лет назад
1)нужно найти цену деления весов
2)затем делишь цену деления на 2 и тем самым находишь погрешность т. е. дельту
3) в ответе пишешь : m= 280г +- погрешность
вот и все все просто
Похожие вопросы
From Wikipedia, the free encyclopedia
This article is about the mathematical term used in fluid dynamics. For the concept of delta-P in diving safety, see Diving hazards.
ΔP (Delta P) is a mathematical term symbolizing a change (Δ) in pressure (P).
Uses[edit]
- Young–Laplace equation
Darcy–Weisbach equation[edit]
Given that the head loss hf expresses the pressure loss Δp as the height of a column of fluid,

where ρ is the density of the fluid. The Darcy–Weisbach equation can also be written in terms of pressure loss:

Lung compliance[edit]
In general, compliance is defined by the change in volume (ΔV) versus the associated change in pressure (ΔP), or ΔV/ΔP:

During mechanical ventilation, compliance is influenced by three main physiologic factors:
- Lung compliance
- Chest wall compliance
- Airway resistance
Lung compliance is influenced by a variety of primary abnormalities of lung parenchyma, both chronic and acute. Airway resistance is typically increased by bronchospasm and airway secretions. Chest wall compliance can be decreased by fixed abnormalities (e.g. kyphoscoliosis, morbid obesity) or more variable problems driven by patient agitation while intubated.[1]
Calculating compliance on minute volume (VE: ΔV is always defined by tidal volume (VT), but ΔP is different for the measurement of dynamic vs. static compliance.
Dynamic compliance (Cdyn)[edit]

where PIP = peak inspiratory pressure (the maximum pressure during inspiration), and PEEP = positive end expiratory pressure. Alterations in airway resistance, lung compliance and chest wall compliance influence Cdyn.
Static compliance (Cstat)[edit]

where Pplat = plateau pressure. Pplat is measured at the end of inhalation and prior to exhalation using an inspiratory hold maneuver. During this maneuver, airflow is transiently (~0.5 sec) discontinued, which eliminates the effects of airway resistance. Pplat is never > PIP and is typically < 3-5 cmH2O lower than PIP when airway resistance is normal.
See also[edit]
- Pressure measurement
- Pressure drop
- Head loss
References[edit]
- ^ Dellamonica J, Lerolle N, Sargentini C, Beduneau G, Di Marco F, Mercat A, et al. (2011). “PEEP-induced changes in lung volume in acute respiratory distress syndrome. Two methods to estimate alveolar recruitment”. Intensive Care Med. 37 (10): 1595–604. doi:10.1007/s00134-011-2333-y. PMID 21866369.
External links[edit]
- Delta P, Diving Pressure Hazard
Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
