ЗАНЯТИЕ
3. ИМПУЛЬСНЫЙ МЕТОД РАДИОЛОКАЦИИ
Сущность
импульсного метода радиолокации и
структурная схема импульсной РЛС
Основные
показатели импульсного метода
Метод
непрерывного излучения
Основная
часть.
Первый
учебный вопрос.
Сущность
импульсного метода радиолокации и
структурная схема импульсной РЛС
Для
обнаружения объектов по отраженным от
них радиоволнам и определения координат
существует два метода радиолокации:
–
импульсный
метод
метод
непрерывного излучения.
Наибольшее
распространение и радиолокационной
технике получил импульсный метод.
Импульсный
метод радиолокации
Импульсный
метод радиолокации бел предложен
впервые в 1926 году советскими учеными
М.А.Бонч-Бруевичем и А.Н.Щукиным для
измерения высоты отражающих слоев
атмосферы (ионосферы). Ими же в 1932 году
была построена первая ионосферная
станция, использующая импульсный метод
работы.
В
современных РЛС для обнаружения и
определения координат целей импульсный
метод радиолокации получил широкое
применение.
Упрощенная
структурная схема импульсной РЛС
включает в себя (рис. 3,1, слайд 20, 25):
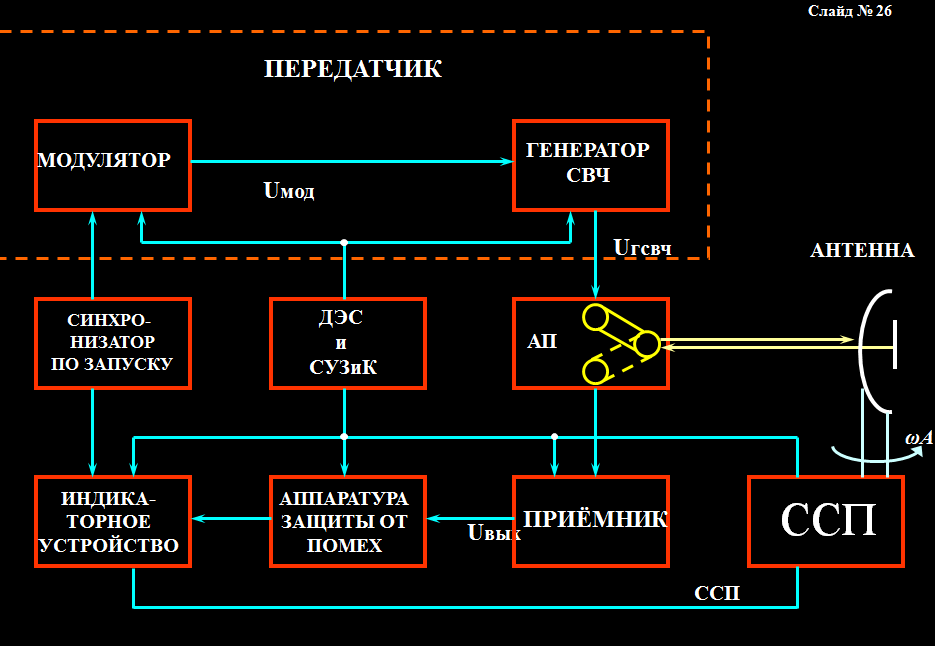
передатчик
(модулятор и генератор СВЧ):
приемник:
антенный
переключатель (АП):
синхронизатор
(блок запуска):
индикаторное
устройство:
антенну:
аппаратуру
защиты от помех:
систему
вращения и синхронизации по вращению:
первичный
источник питания (ДЭС):
СУЗиК.
Система
управления, защиты и контроля обеспечивает
включение станции, управление режимами
работы, защиту аппаратуры в аварийных
ситуациях и контролирует ее работу.
Для
преподавателя.
Показать системы РЛС на структурной
схеме на стенде.
Принцип
работы импульсной РЛС
Принцип
работы импульсной РЛС можно уяснить,
рассмотрев «Упрощенную структурную
схему импульсной РЛС (рис. 3.1, слайд 20,
25)
и графики, поясняющие работу импульсного
радиолокатора (рис. 3.2, слайд 21, 26).
Работу
импульсной РЛС лучше всего начать
рассматривать с блока синхронизации
(блока запуска) станции. Этот блок
задает «ритм» работы станции: он задает
частоту повторения зондирующих сигналов,
синхронизирует работу индикаторного
устройства с работой передатчика
станции. Синхронизатор вырабатывает
кратковременные остроконечные импульсы
Изап
с определенной частотой повторения
Тп.
Конструктивно синхронизатор может
быть выполнен в виде отдельного блока
или представлять единое целое с
модулятором станции.
Модулятор
управляет работой генератора СВЧ,
включает и выключает его. Модулятор
запускается импульсами синхронизатора
и формирует мощные прямоугольные
импульсы необходимой амплитуды Uм
и длительности τи.
Генератор СВЧ включается в работу
только при наличии импульсов модулятора.
Частота включения генератора СВЧ, а,
следовательно, и частота повторения
зондирующих импульсов определяется
частотой импульсов синхронизатора Тп.
Продолжительность работы генератора
СВЧ при каждом его включении (то есть
длительность зондирующего импульса)
зависит от длительности формирующего
в модуляторе импульса τи.
Длительность импульса модулятора τи
обычно составляет единицы микросекунд,
а паузы между ними – сотни и тысячи
микросекунды.
Под
действием напряжения модулятора
генератор СВЧ формирует мощные
радиоимпульсы Uген,
длительность и форма которых определяется
длительностью и формой импульсов
модулятора. Колебания высокой частоты,
то есть зондирующие импульсы от
генератора СВЧ, поступают через антенный
переключатель в антенну. Частота
колебаний радиоимпульсов определяется
параметрами генератора СВЧ.
Антенный
переключатель
(АП) обеспечивает возможность работы
передатчика и приемника на одну общую
антенну. На время генерации зондирующего
импульса (мкс) он подключает антенну к
выходу передатчика и блокирует вход
приемника, а на нее остальное время
(время паузы – сотни, тысячи мкс)
подключает антенну к входу приемника
и отключает ее от передатчика. В
импульсный РЛС в качестве антенных
переключателей применяются автоматические
быстродействующие переключатели.
Антенна
преобразует колебания СВЧ в электромагнитную
энергию (радиоволны) и фокусирует ее в
узкий пучок. Отраженные от цели сигналы
принимаются антенной, проходят через
антенный переключатель и поступают на
вход приемника Uс,
где они селектируются, усиливаются,
детектируются и через аппаратуру защиты
от помех подаются на индикаторные
устройства.
Аппаратура
защиты от помех включается только при
наличии в зоне действия РЛС пассивных
и активных помех. Подробно
эта аппаратура будет изучаться в теме
7.
Индикаторное
устройство является оконечным устройством
РЛС и служит для отображения и съема
радиолокационной информации. Электрическая
схема и конструкция индикаторных
устройств определяется практическим
назначением станции и могут быть весьма
различными. Например,
для РЛС
обнаружения с помощью индикаторных
устройств должна воспроизводиться
воздушная обстановка и определяться
координаты целей Д и β. Эти индикаторы
называются индикаторами кругового
обзора (ИКО). В РЛС измерения высоты
полета цели (высотомерах) используются
индикаторы высоты. Индикаторы дальности
измеряют только дальность до цели и
используются для контроля.
Для
точного определения дальности необходимо
измерять интервал времени tз
(десятки и сотни мкс) с высокой точностью,
то есть требуются приборы с весьма
малой инерционностью. Поэтому в
индикаторах дальности в качестве
измерительных приборов используются
электронно-лучевые трубки (ЭЛТ).
Примечание.
Принцип измерения дальности был изучен
в занятии 1, поэтому при изучении этого
вопроса основное внимание уделить
формированию развертки на ИКО.
Сущность
измерения дальности (время запаздывания
tз)
с помощью ЭЛТ можно пояснить на примере
использования линейной развертки в
трубке с электростатическим управлением
электронным лучом.
При
линейной развертке в ЭЛТ электронный
луч под действием напряжения развертки
Uр
периодически перемещается с постоянной
скоростью по прямой слева направо (рис.
1.7,слайд 9, 12).
Напряжение развертки вырабатывается
специальным генератором развертки,
который запускается тем же импульсом
синхронизатора, что и модулятор
передатчика. Поэтому движение луча по
экрану начинается каждый раз в момент
посылки зондирующего импульса.
При
использовании амплитудной отметки
цели отраженный сигнал, поступающий с
выхода приемника, вызывает отклонение
луча в перпендикулярном направлении.
Таким образом, отраженный сигнал можно
видеть на экране трубки. Чем дальше
находится цель, тем больше времени
проходит до момента появления отраженного
импульса и дальше вправо успевает
переместиться луч вдоль линии развертки.
Очевидно, каждой точке линии развертки
соответствует определенный момент
прихода отраженного сигнала и,
следовательно, определенное значение
дальности.
В
РЛС, работающих в режиме кругового
обзора, используются индикаторы
кругового обзора (ИКО) и ЭЛТ с
электромагнитным отклонением луча и
яркостной отметкой. Антенна РЛС с
узконаправленным лучом (ДН) перемещается
механизмом вращения антенны в
горизонтальной плоскости и «просматривает»
окружающее пространство (рис. 3.3, слайд,
На ИКО линия
развертки дальности вращается по
азимуту синхронно с антенной, а начало
движения электронного луча от центра
трубки в радиальном направлении
совпадает с моментом излучения
зондирующего импульса. Синхронное
вращение развертки на ИКО с антенной
РЛС осуществляется при помощи силового
синхронного привода (ССП). Ответные
сигналы высвечиваются на экране
индикатора в виде яркостной отметки.
ИКО
позволяет одновременно определять
дальность Д
и азимут β
цели. Для удобства отсчета на экране
ИКО электронным способом наносятся
масштабные отметки дальности, имеющие
вид окружностей и масштабные отметки
азимута в виде ярких радиальных линий
(рис. 3.3, слайд, 8, 27).
Примечание.
Используя телевизионную установку и
карточку ТВ предложить студентам
определить координаты целей. Указать
масштаб индикатора: отметки дальности
следуют через 10 км, отметки азимута –
через 10 градусов.
В
Ы В О Д
(слайд
28)
Определение
дальности до объекта при импульсном
методе сводится к измерению времени
запаздывания
tз
отраженного
сигнала относительно зондирующего
импульса. Момент излучения зондирующего
импульса берется за начало отсчета
времени распространения радиоволн.
Достоинства
импульсных РЛС:
удобство
визуального наблюдения одновременно
всех целей, облучаемых антенной в виде
отметок на экране индикаторов;
поочередная
работа передатчика и приемника позволяет
использовать одну общую антенну для
передачи и приема.
Второй
учебный вопрос.
Основные
показатели импульсного метода
Основными
показателями импульсного метода
являются (слайд 29):
–
однозначно определяемая максимальная
дальность, Д;
разрешающая
способность по дальности, δД;
минимальная
определяемая дальность, Дmin.
Рассмотрим
эти показатели.
Однозначно
определяемая максимальная дальность
Максимальная
дальность действия РЛС определяется
основной формулой радиолокации и
зависит от параметров РЛС.
Однозначность
определения дальности до объекта
зависит от периода следования зондирующих
импульсов Тп.
Далее этот вопрос изложить следующим
образом.
Максимальная
дальность действия РЛС равна 300 км.
Определить время задержки до цели,
находящейся на этой дальности

Период
повторения зондирующих импульсов
выбран равным 1000 мкс. Определить
дальность до цели, время задержки до
которой равно Тп

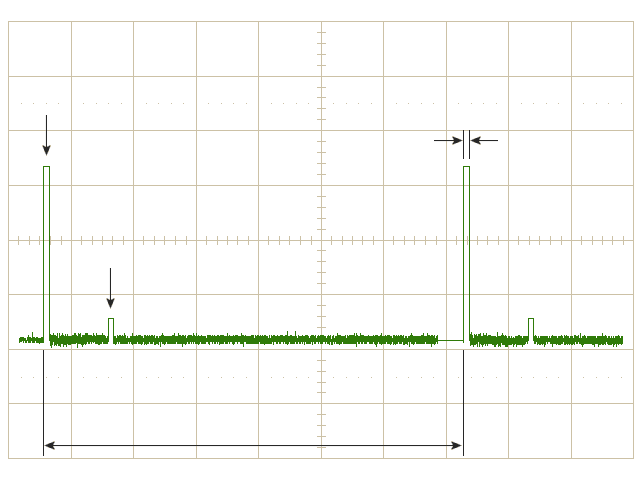
В
воздушном пространстве находятся две
цели: цель № 1 на дальности 100 км и цель
№ 2 на дальности 200 км. Как будут выглядеть
отметки от этих целей на индикаторе
РЛС (рис. 3.4, слайд 22, 30).
При зондировании
пространства импульсами с периодом
повторения 1000 мкс отметка от цели № 1
будет высвечиваться на дальности 50 км,
так как после дальности 150 км начнется
новый период развертки и дальняя цель
даст отметку в начале шкалы (на дистанции
50 км). Отсчитанная дальность не
соответствует реальной.
Как
исключить неоднозначность в определении
дальности?
После
обобщения ответов студентов сделать
вывод:
Для
однозначного определения дальности
необходимо период повторения зондирующих
импульсов выбирать в соответствии с
заданной максимальной дальностью
действия РЛС, то есть

 .
.
Для
заданной дальности 300 км период повторения
зондирующих импульсов должен быть
больше 2000 мкс или частота повторения
должна быть меньше 500 Гц.

Кроме
того, максимально определяемая дальность
зависит от ширины ДНА, скорости вращения
антенны и необходимого числа импульсов,
отраженных от цели за один оборот
антенны.
Разрешающей
способностью по дальности (δД) называется
то минимальное расстояние между двумя
целями, находящимися на одном азимуте
и угле места, при котором отраженные
от них сигналы наблюдаются на экране
индикатора еще раздельно
(рис. 3.5, слайд 23, 31,
32).
При заданной
длительности зондирующего импульса
τи
и расстоянии между целями ∆Д1
цели № 1 и № 2 облучаются раздельно. При
той же длительности импульса, но при
расстоянии между целями
∆Д2
цели № 3 и № 4 облучаются одновременно.
Следовательно, в первом случае на экране
ИКО будут видны раздельно, а во втором
– слитно. Отсюда вытекает, что для
раздельного приема импульсных сигналов
необходимо, чтобы интервал времени
между моментами их приема был больше
длительности импульса τи
(∆t
> τи)


Минимальная
разность (Д2
– Д1),
при которой цели видны на экране
раздельно, по определению есть разрешающая
способность по дальности δД,
следовательно


Помимо
длительности импульса
τи на
разрешающую способность станции по
дальности оказывает влияние разрешающая
способность индикатора, определяемая
масштабом развертки и минимальным
диаметром светящегося пятна на экране
ЭЛТ (dп
≈ 1 мм). Чем
крупнее масштаб развертки дальности
и лучше фокусировка луча ЭЛТ, тем лучше
разрешающая способность индикатора.
В
общем случае разрешающая способность
РЛС по дальности равна

где
δДи
– разрешающая способность индикатора.
Чем
меньше δД
, тем
лучше разрешающая способность. Обычно
разрешающая способность РЛС по дальности
имеет величину
δД = (0,5…5)
км.
В
отличие от разрешающей способности по
дальности разрешающая способность по
угловым координатам (по азимуту δβ
и углу места
δε) не
зависит
от метода
радиолокации и определяется шириной
диаграммы направленности антенны в
соответствующей плоскости, которую
принято отсчитывать по уровню половинной
мощности.
Разрешающая
способность РЛС по азимуту
δβо
равна:
δβо
= φ0,5р
о
+ δβио,
где
φ0,5р
о
– ширина диаграммы направленности по
половинной мощности в горизонтальной
плоскости;
δβио
– разрешающая способность по азимуту
индикаторной аппаратуры.
Высокие
разрешающие способности РЛС позволяют
раздельно наблюдать и определять
координаты близко расположенных целей.
Минимальная
определяемая дальность – это наименьшее
расстояние, на котором станция еще
может обнаруживать цель. Иногда
пространства вокруг станции, в котором
цели не обнаруживаются, называют
«мертвой» зоной
(слайд 33).
Использование
в импульсной РЛС одной антенны для
передачи зондирующих импульсов и приема
отраженных сигналов требует отключения
приемника на время излучения зондирующего
импульса τu.
Поэтому отраженные сигналы, приходящие
к станции в момент, когда ее приемник
не подключен к антенне, не будут приняты
и зарегистрированы на индикаторах.
Продолжительность времени, в течение
которого приемник не может принимать
отраженные сигналы, определяется
длительностью зондирующего импульса
τu
и временем, необходимым для переключения
антенны с передачи на прием после
воздействия на него зондирующего
импульса передатчика tв.
Зная
это время, значение минимальной дальности
Дmin
импульсной
РЛС можно
определить по формуле

где
τu
– длительность зондирующего импульса
РЛС;
tв
– время включения приемника после
окончания зондирующего импульса
передатчика (единицы – мкс).
Например.
При τu
= 10мкс Дmin
= 1500 м
при τu
= 1 мкс Дmin
= 150 м.
Следует
иметь ввиду, что к увеличению радиуса
«мертвой» зоны
Дmin
приводит наличие на экране индикатора
отраженный от местных предметов и
ограниченность пределов поворота
антенны по углу места.
В
Ы В О Д
Импульсный
метод радиолокации эффективен при
измерении дальностей объектов,
находящихся на больших расстояниях.
Третий учебный
вопрос
Метод
непрерывного излучения
Наряду
с использованием импульсного метода
радиолокации можно осуществить с
помощью установок с непрерывным
излучением энергии. При непрерывном
методе излучения представляется
возможность посылать большую энергию
в направлении на цель.
Наряду
с преимуществом энергетического порядка
метод непрерывного излучения по ряду
показателей уступает импульсному
методу. В зависимости от того, какой
параметр отраженного сигнала служат
основой для измерения дальности до
цели, при непрерывном методе радиолокации
различают:
фазовый
(фазометрический) метод радиолокации;
частотный
метод радиолокации.
Возможны
также комбинированные методы радиолокации,
в частности, импульсно-фазовый и
импульсно-частотный.
При
фазовом методе
радиолокации о расстоянии до цели до
цели судят по разности фаз излучаемых
и принимаемых отраженных колебаний.
Первые фазометрические методы измерения
расстояния были предложены и разработаны
академиками Л.И.Мандельштамом и
Н.Д.Папалекси. Эти методы нашли применение
в длинноволновых авиационных
радионавигационных системах большого
радиуса действия.
При
частотном методе радиолокации
о расстоянии до цели судят по частоте
биений между прямым и отраженным
сигналами.
В
Ы В О Д
Определение
дальности до объекта при импульсном
методе сводится к изменению времени
запаздывания tзап
отраженного сигнала относительно
зондирующего импульса.
Для
однозначности определения дальности
до объекта необходимо, чтобы tзап.мах
≤ Тп.
Разрешающая
способность по дальности δД тем лучше,
чем меньше длительность зондирующего
импульса τu.
4
Соседние файлы в папке 2102172
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

Продолжаем говорить о радарах. И перед тем, как мы рассмотрим главные вопросы, нужно четко представлять то, как работает радар. Т.е. как излучается импульс и как принимается сигнал.
Судовые радары (РЛС) основаны на импульсном методе. Если говорить проще, то есть передатчик и приёмник. В антенне находится переключатель, который в момент подачи импульса подключает антенну к передатчику и защищает приёмник от воздействия этого мощного импульса. После подачи импульса, передатчик соединяет антенну с приёмником до генерации следующего импульса.
Отсюда следует, что один цикл состоит из периода, когда импульс вырабатывается, и период, когда антенна работает на прослушивание и ждет отраженный сигнал. Длительность цикла определяется максимальной дальностью, на которую рассчитана развертка индикатора. Т.е. если менять шкалу дальности на радаре (3, 6, 12, 24 мили), то будет меняться и длина всего цикла импульса. На больших шкалах — длинные импульсы, и чем меньше шкала — тем короче импульс (цикл).
Так как в основу обнаружения цели положено свойство постоянство скоростей распространения радиоволн, то после подачи импульса, он должен быть принят, и по нему будет рассчитана дистанция до цели. Следующий импульс будет сгенерирован только, когда дойдет сигнал от самого дальнего объекта, при заданной развертке индикатора. Другими словами, дистанция до цели измеряется по промежутку времени между подачей радиоволны и принятием эхо-сигнала. И важно быть уверенным, что именно данному импульсу соответствует принятый эхо-сигнал.
Теперь мы можем поговорить о том, что саму длительность импульса можно менять в настройках радара. Делается это обычно в левой верхней части экрана: Long Pulse (LP), Medium Pulse (MP), Short Pulse (SP). Но нужно понимать, что это нам даёт.
При увеличении длительности импульса увеличивается дальность действия станции. Т.е. посылается более мощный поток энергии, и радар сможет лучше обнаруживать цели на дальних дистанциях. Но при этом нужно помнить, что минимальная дальность обнаружения целей увеличится (что нам не выгодно в некоторых случаях). Дело в том, что отраженный сигнал от ближних целей не может быть различен на фоне мощного увеличенного зондирующего импульса.
При уменьшении длительности импульса мы получаем следующие выгоды:
— лучшее обнаружение целей, расположенных близко к судну;
— улучшается разрешающая способность по дальности (радар может определить отдельно два рядом находящихся объекта с одними угловыми координатами);
— увеличивается частота следования импульсов, что в свою очередь повышает вероятность обнаружения цели. Ведь, для надежного обнаружения целей необходимо, чтобы за каждый цикл радиолокационного обзора от объекта отражалось, по крайней мере, 5 импульсов.
На обзор целей также влияет и скорость вращения антенны. Чем выше скорость, тем чаще диаграмма излучения оказывается направленной на объект. И раз уж мы об этом заговорили, то одной из характеристик антенны является диаграмма направленности. Но эту темя мы уже затронем в следующий раз.
Автор: Евгений Богаченко
Импульсный радиолокатор

Рисунок 1. Измерение времени запаздывания в радиолокаторе

зондирующий импульс
отраженный сигнал
Рисунок 1. Измерение времени запаздывания в радиолокаторе


Рисунок 1. Измерение времени запаздывания в радиолокаторе
Импульсный радиолокатор
зондирующий импульс
отраженный сигнал
τ
Τ
Рисунок 2. Параметры импульсов в радиолокаторе

зондирующий импульс
отраженный сигнал
τ
Τ
Рисунок 2. Параметры импульсов в радиолокаторе
Импульсный радиолокатор — это радиолокационное устройство, которое излучает короткие мощные импульсы,
а между ними (во время так называемого интервала покоя) принимает эхо-сигналы.
В отличие от
радиолокатора непрерывного излучения,
передатчик импульсного радиолокатора выключен до момента окончания измерения.
Характерной особенностью этого метода является то, что зондирующие импульсы имеют очень малую длительность
(обычно их длительность составляет τ ≈ 0,1 … 1 мкс).
Между зондирующими импульсами имеются очень продолжительные паузы Τ >> τ,
которые называют интервалами приема (обычно Т ≈ 1 мс), как показано на Рисунке 2.
Дальности до отражающих объектов определяют путем
измерения времени запаздывания
эхо-сигнала, как показано на Рисунке 1 (для стационарных радиолокаторов) или сравнением характерных изменений
допплеровского спектра
эхо-сигнала со значениями для заданных дальностей, хранящимися в базе данных (для радиолокаторов, расположенных на быстро движущихся платформах).
Импульсные радиолокаторы, как правило, разрабатываются для больших дальностей целей и излучают сравнительно высокую импульсную мощность.
Важной отличительной особенностью по сравнению с другими методами радиолокации является необходимость
синхронизации во времени
всех процессов, происходящих в импульсном радиолокаторе.
Передний фронт излучаемого импульса определяет начало отсчета для измерения запаздывания эхо-сигнала.
Концом интервала запаздывания является момент достижения нарастающим фронтом эхо-сигнала своей вершины.
Задержки, возникающие при обработке сигнала, являются систематическими и должны учитываться при расчете дальности цели.
Случайные отклонения времени запаздывания влияют на
точность
импульсного радиолокатора.
Зондирующий сигнал
Форма зондирующего сигнала может быть математически описана следующим выражением:
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |
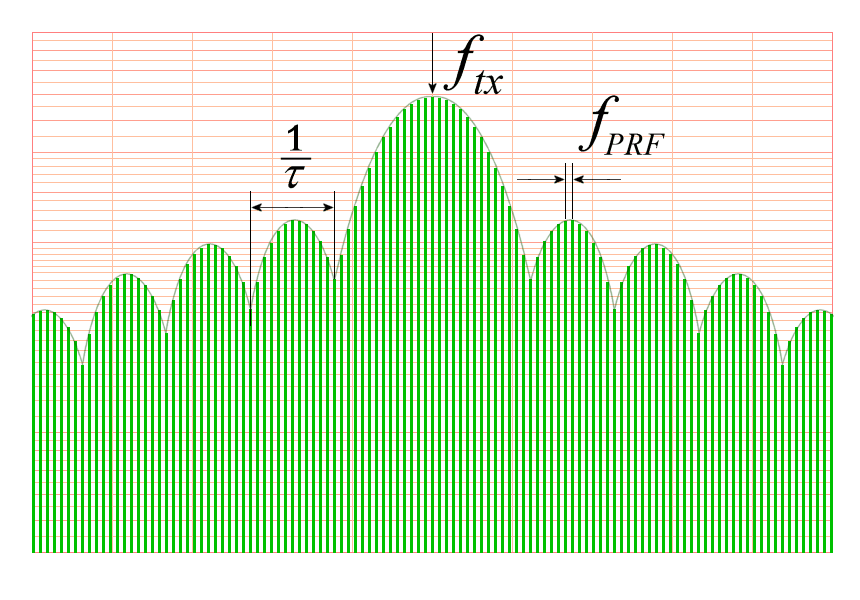
Рисунок 3. Частотный спектр последовательности прямоугольных импульсов вблизи несущей частоты ftx

Рисунок 3. Частотный спектр последовательности прямоугольных импульсов вблизи несущей частоты ftx
Функция A(t) описывает изменение амплитуды в зависимости от времени t, например, амплитудную модуляцию.
В простейшем случае передатчик включается на короткое время (длительностью τ),
а в остальное время остается в «выключенном» состоянии.
Поэтому A(t) = 1 во время излучения импульса и A(t) = 0 в остальное время.
Зависимость от времени определяется частотой повторения импульсов и
коэффициентом заполнения.
Поскольку радиолокационные отклики испытывают разнообразные, не поддающиеся точному учету, потери,
действительная амплитудная модуляция не несет особого смысла, за исключением переключающей функции (включение / выключение).
Огибающая частотного спектра периодической последовательности импульсов описывается функцией вида
(sin x)/x (Рисунок 3), которую иногда называют арочным синусом.
Основная часть излучаемой мощности (обратите внимание на логарифмический масштаб оси ординат)
находится в интервале частот BHF = 2/τ в окрестности несущей частоты сигнала ftx.
Частота повторения импульсов
fPRF, длительность зондирующего импульса τ
и длительность интервала приема (Τ − τ) определяют показатели качества радиолокатора, например,
минимальную дальность действия
(зондирующий импульс должен полностью покинуть антенну) и
максимальная однозначно измеряемая дальность
(эхо-сигнал должен быть принят до момента излучения следующего зондирующего импульса).
Длительность зондирующего импульса τ
в основном определяет
разрешающую способность по дальности
ΔR импульсного радиолокатора, которая описывается выражением:
Чем короче зондирующий сигнал, тем ближе друг к другу могут находиться два отражателя,
которые тем не менее будут обнаруживаться как два отдельных объекта, а не как один протяженный объект.
Ширина спектра BHF зондирующего сигнала увеличивается по мере уменьшения длительности импульса:
В случае простой модуляции импульса уменьшение его длительности ограничивает максимальную дальность действия радиолокатора.
В этих условиях энергия зондирующего сигнала Ep
может быть увеличена только за счет импульсной мощности PS при заданном разрешении по дальности.
Для максимальной дальности определяющим фактором является энергия импульса, а не импульсная мощность:
| Ep = Ps· τ = Pav· Τ = | Pav | где | Ep = энергия импульса; PS = излучаемая импульсная мощность; Pav = средняя мощность (за период зондирования). |
(4) |
| fPRF |
Значительное улучшение в такой ситуации может быть достигнуто за счет внутренней модуляции зондирующего импульса
(внутриимпульсной модуляции).
Соотношение между длительностью зондирующего импульса и длительностью импульса на выходе приемника определяется сжатием импульсов в приемнике.
Измерение координат нескольких отражателей, в том числе определение дальности до каждого из них,
может быть выполнено в течение длительности зондирующего импульса.
Функция φ(t) в выражении (1) описывает фазовый сдвиг всего сигнала.
Радиолокатор, в котором начальная фаза зондирующего сигнала известна или может быть вычислена, называют
полностью когерентным.
Если же известно текущее значение фазы, но начальное ее значение не известно,
то радиолокатор относят к одному из видов псевдокогерентных радиолокаторов.
Если начальная фаза полностью неизвестна (меняется хаотически), радиолокатор является некогерентным.
Функция φ(t) приобретает большое значение для случаев внутриимпульсной модуляции с кодированием (манипуляцией) фазы.
Эхо-сигнал (отраженный сигнал)
Обычно предполагают, что длительность зондирующего импульса и длительность отраженного эхо-сигнала равны.
Поэтому при расчетах, где фигурируют излучаемая мощность и мощность принятого сигнала (что имеет место в
фундаментальном уравнении радиолокации),
длительность этих сигналов можно опустить.
- B спектре:
- могут возникать дополнительные гармоники на несущей частоте;
- на несущую частоту могут быть наложены одна или несколько
допплеровских частот.
- Может изменяться направление
поляризации. - Длительность эхо-сигнала не является постоянной и может существенно увеличиваться за счет
интерференции сигналов,
отраженных близко расположенными элементами цели (следовательно, имеющими отличия во времени запаздывания).
В итоге эхо-сигнал подвергается такому большому количеству влияний, что его форма рассматривается как неизвестная.
Тем не менее, оптимальные согласованные приемники или
согласованные фильтры
создаются путем использования нескольких параллельных каналов,
учитывающих возможные деформации сигнала.
Эти устройства обеспечивают максимально возможное отношение «сигнал — (шум + помеха)»
(В англоязычных источниках: Signal to Noise Plus Interference Ratio, SNIR).
С их выхода сигнал поступает на дальнейшую обработку.
При этом запоминается момент (положение на оси времени) максимального превышения сигналом шума как важный параметр,
идентифицирующий этот сигнал среди сигналов, принятых от других целей.
В общем случае ширина полосы приемника выбирается как можно более узкой для снижения уровня принимаемых нежелательных шумовых и помеховых колебаний.
В случае использования простого радиоимпульса ширина полосы приемника определяется соотношением BHF = 1/τ.
Влияние шумов может быть также уменьшено за счет
накопления импульсов
в приемнике.
Это означает суммирование принятых импульсов в нескольких периодах зондирования.
Предполагается, что на протяжении интервала накопления (несколько периодов зондирования) цель остается неподвижной,
то есть задержка между импульсами будет постоянной и в каждом очередном периоде эхо-сигнал будет находиться на одном и том же месте на оси времени.
Шум имеет случайное распределение амплитуд и складываться будет со случайными фазами.
Поэтому результат его суммирования всегда будет меньше суммы накопленных эхо-сигналов.
Таким образом, за счет использования накопления улучшается отношение «сигнал — шум».
Построение, структурная схема
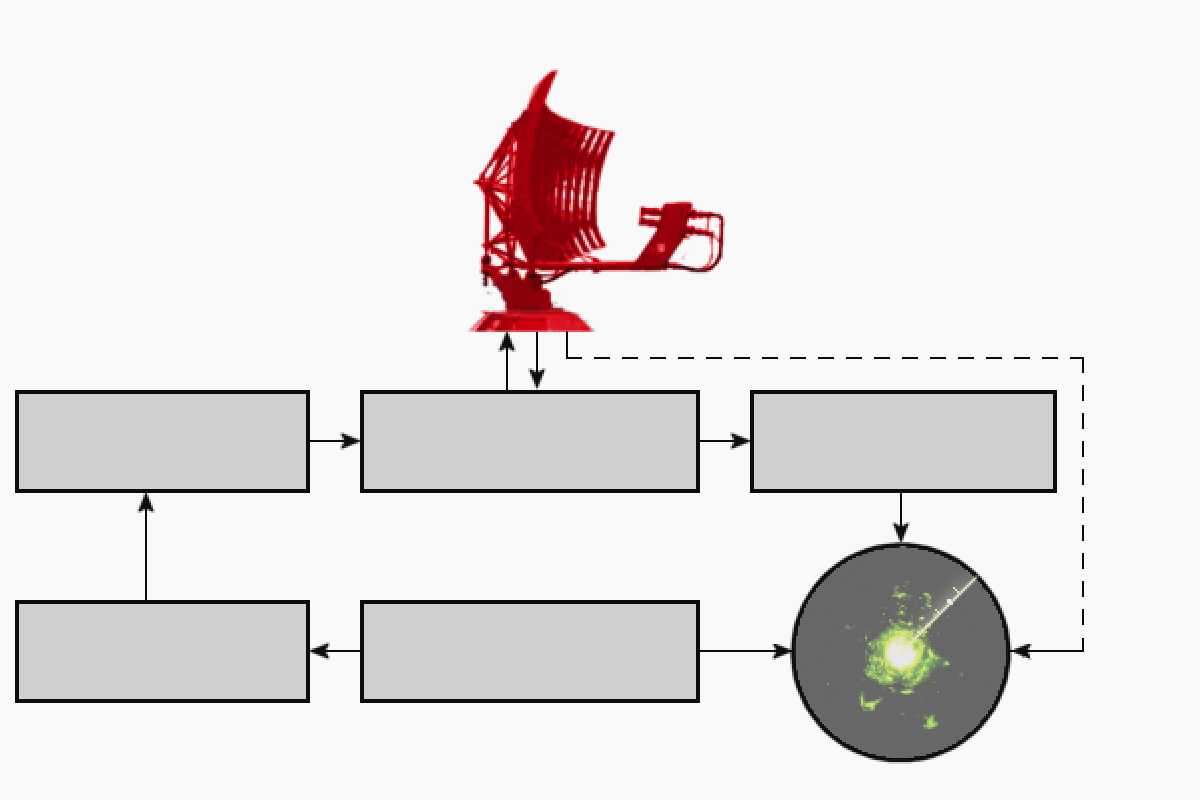
Синхронизатор
Модулятор
Передатчик
Антенный переключатель
Антенна
Приемник
Индикатор
Рисунок 4. Структурная схема моностатического импульсного радиолокатора

Рисунок 4. Структурная схема моностатического импульсного радиолокатора
(интерактивный рисунок)
Конструкция импульсного радиолокатора зависит от того находятся ли передатчик и приемник в одном месте
(совмещенный, моностатический радиолокатор) или оба эти компонента размещены в совершенно разных местах
(многопозиционный, бистатический радиолокатор).
Совмещенный импульсный радиолокатор, в дополнении к компактной конструкции, обладает тем преимуществом,
что важные для импульсного радиолокатора устройства синхронизации могут быть сосредоточены в центральном
блоке синхронизации.
Таким образом, внутренние задержки на переключающих устройствах могут быть малыми.
Сложная и дорогая
антенна радиолокатора
за счет применения антенного переключателя может использоваться как для излучения, так и для приема сигналов.
Недостатком является необходимость отключения высокочувствительного приемника при помощи
антенного переключателя
на время излучения зондирующего сигнала во избежание выхода его из строя под воздействием большой мощности передатчика.
В течение этого времени прием сигналов невозможен.
Описание блоков на блок-схеме:
В бистатическом импульсном радиолокаторе приемник имеет собственную антенну, находящуюся на удалении от передатчика.
Этим определяется преимущество, заключающееся в отсутствии необходимости сложных мер защиты приемника от высокой мощности передатчика.
В простейшем случае сеть строится путем дополнения существующего моностатического радиолокатора новыми приемными пунктами.
Пример: метеорологический радиолокатор
Poldirad
в Оберпфаффенгофене (Oberpfaffenhofen), Германия (недалеко от Мюнхена).
Приемные антенны не являются остронаправленными: они должны обеспечивать прием с нескольких направлений одновременно.
Недостатком здесь является очень сложная синхронизация.
Одновременно с эхо-сигналами приемник должен принимать и прямой сигнал от передатчика.
По этому сигналу и известному расстоянию до передатчика может быть сформирован сигнал синхронизации.
Основным применение бистатической схемы в военном деле являются
загоризонтные радиолокаторы.
Пассивные радиолокаторы
являются разновидностью бистатических радиолокаторов.
В них используются различные высокочастотные излучения (радио- или телевещание, импульсные радиолокаторы).
В пассивных радиолокаторах положение цели рассчитывается на основе разницы между временем прихода прямого сигнала
и дополнительным временем запаздывания отраженного сигнала.
Неоднозначность измерения устраняется путем непосредственного определения направления на цель по ее побочным излучениям или
путем синхронизации двух пассивных радиолокаторов, расположенных в разных местах.
Применение
Импульсные радиолокаторы разработаны, в основном, для больших расстояний до целей.
Основным их применением все еще остается военная сфера.
Другими применениями являются
управление воздушным движением,
наблюдение за погодой
(особенно
осадками),
а также спутниковое дистанционное зондирование Земли.
Как определить параметры сигнала РЛС???
Егор Александрович
Ученик
(166),
закрыт
9 лет назад
.Как определить параметры сигнала обзорной РЛС: длительность импульсов “тау импульса”, период Тп и частоту повторения Fп, скважность Q и число импульсов “n”, длительность пачки “тау пачки” обзорной РЛС работающей в диапазоне дальности от Rmin=150м до Rmax=75км, с разрешающей способностью по дальности δR=150м. Если круговой обзор совершается антенной диаграммой направленности шириной Δδ=1град. со скоростью ωОБЗ=200 град./с, время восстановления антенного переключателя τВОС=0,1мкс.
Игорь
Мудрец
(11757)
9 лет назад
Расстояние, проходимое светом в свободном пространстве за одну микросекунду – 300 м. Теперь считай: импульс послан рлс.. . Через сколько микросекунд он достигнет отметки в 75 км? Можешь в столбик…
