

Дополнения
1.О применении определённого интеграла для нахождения объёмов тел вращения
1.1.Формула объёма тела вращения
В п.16.2 дано определение тела вращения.
Получим формулу для вычисления объёма тела вращения, применяя интеграл, о котором вам рассказали в курсе «Алгебры и начал математического анализа».
Пусть f(x) — непрерывная на отрезке [a; b] функция, не принимающая отрицательных значений; А, В — точки графика этой функции (рис. 225).

Рис. 225
Рассмотрим криволинейную трапецию aABb, ограниченную кривой графика функции y = f(x), отрезками aA, bB и отрезком [a; b] координатной оси Ох (см. рис. 225). При вращении этой трапеции вокруг оси Ох образуется тело вращения (рис. 226), которое обозначим Ф и поставим себе задачу: найти объём этого тела.

Рис. 226
Через произвольную точку х = с (a ⩽ с ⩽ b) отрезка [a; b] проведём плоскость, перпендикулярную оси Ox. Сечением тела Ф этой плоскостью является круг, радиус которого равен f(с), а площадь — πf2(с) (или точка (c; 0)).
Объём части тела Ф, заключённой между этой плоскостью и плоскостью х = a, изменяется при изменении x. Обозначим этот переменный объём V(х). Заметим, что V(x) = V(a) = 0 при х = a; при х = b имеем V(x) = V(b) = V — искомый объём тела вращения Ф.
Покажем, что функция V(x) имеет производную V′(х) и V′(х) = πf2(х).
Придадим абсциссе х приращение ∆х > 0, тогда объём V(х) получает приращение ∆V(х) = V(x + ∆x) – V(x). Пусть m и М — соответственно наименьшее и наибольшее значения функции f(х) на промежутке [х; х + ∆х]. Цилиндр, радиус основания которого равен m, содержится в теле вращения объёма ∆V(x), а цилиндр, радиус основания которого равен M, содержит тело объёма ∆V(х); образующие цилиндров параллельны оси Ох и имеют длину, равную ∆х. Объёмы этих цилиндров равны соответственно πm2•∆x и πM2•∆х. На основании свойства 2 объёмов (п. 10.1) получаем
πm2•∆x ⩽ ∆V(x) ⩽ πM2•∆x,
откуда
πm2 ⩽  ⩽ πM2.
⩽ πM2.
Рассуждения для случая ∆х < 0 проводятся аналогично и дают тот же результат.
Пусть теперь ∆х  0. Имеем
0. Имеем  m =
m =  M = f(x), тогда
M = f(x), тогда
 πm2 ⩽
πm2 ⩽  ⩽
⩽  πM2
πM2
или
πf2(х) ⩽  ⩽ πf2(x).
⩽ πf2(x).
Значит,  = πf2(х). По определению производной функции
= πf2(х). По определению производной функции  = V′(x). Поэтому V ′(x) = πf2(х), следовательно, V(х) — первообразная для πf2(х).
= V′(x). Поэтому V ′(x) = πf2(х), следовательно, V(х) — первообразная для πf2(х).
Таким образом, переменный объём V(x) телa вращения представляет собой одну из первообразных для функции πf 2(х) на отрезке [a; b]. Эта первообразная обладает тем свойством, что при х = a она обращается в нуль (V(a) = 0), а при х = b значение функции V(x) равно объёму тела вращения Ф (V(b) = V).
Если F(х) — также некоторая первообразная для функции πf 2(x), то V(x) = F(x) + С, где С — произвольная постоянная. Так как V (a) = 0, то из равенства V(a) = F (a) + C = 0 находим С = –F(a). Значит, V(x) = F(x) – F(a). Toгдa V(b) = F(b) – F(a). Ho V(b) = V — искомый объём тела вращения Ф. Таким образом, V = F(b) – F(a), где F(b) и F(a) — значения первообразной для функции πf 2(х) соответственно при х = b и х = a. Это означает, что
V =  f 2(x)dx = π
f 2(x)dx = π (x)dx.
(x)dx.
Вот почему объём тела, образованного вращением вокруг оси Ох фигуры, ограниченной линиями у = f(x), х = a, х = b, у = 0, вычисляется по формуле

Рис. 227
V =  (x)dx.(*)
(x)dx.(*)
ЗАДАЧА. Вычислить объём тела, образованного вращением вокруг оси Ох фигуры, ограниченной линиями у =  , х = 0, x = 2 и y = 0 (рис. 227).
, х = 0, x = 2 и y = 0 (рис. 227).
Решение. Воспользуемся формулой V = π (x)dx, для чего из уравнения у =
(x)dx, для чего из уравнения у =  находим y2 = 2х. Тогда получаем
находим y2 = 2х. Тогда получаем
V = π dx = 2π•
dx = 2π• =
= = 4π.
= 4π.
Ответ: 4π.
1.2. Объёмы конуса, шара и его частей
Используя формулу V =  (x)dx вычисления объёма тела вращения, получим формулы для вычисления объёма каждого изученного ранее тела вращения.
(x)dx вычисления объёма тела вращения, получим формулы для вычисления объёма каждого изученного ранее тела вращения.
а) Объём конуса и усечённого конуса

Теорема 1 (об объёме полного конуса). Объём V конуса с высотой Н и радиусом основания R равен одной трети произведения площади основания на высоту:
V =  R2Н.
R2Н.

Рис. 228
Доказательство. Конус с высотой Н и радиусом основания R можно рассматривать как тело, образованное вращением вокруг оси Ox прямоугольного треугольника с вершинами О(0; 0), А(Н; 0) и B(Н; R) (рис. 228). Треугольник АОВ является частным случаем криволинейной трапеции, которая ограничена графиком функции у =  х (0 ⩽ х ⩽ H), осью Ох и отрезком прямой х = Н. Поэтому, используя формулу (*) п. 1.1 «Дополнений» для объёма V конуса, получаем:
х (0 ⩽ х ⩽ H), осью Ох и отрезком прямой х = Н. Поэтому, используя формулу (*) п. 1.1 «Дополнений» для объёма V конуса, получаем:
V =  dx = π
dx = π  •
• =
=  πR2H,
πR2H,
где πR2 — площадь основания конуса. Теорема доказана. ▼

Теорема 2 (об объёме усечённого конуса). Объём усечённого конуса с высотой Н и радиусами оснований r и R равен сумме объёмов трёх конусов с высотой Н, радиусы оснований которых соответственно равны r, R и  :
:
V =  (r2 + R2 + rR)H.
(r2 + R2 + rR)H.
Доказательство. Усечённый конус с высотой H и радиусами оснований r и R можно получить, вращая вокруг оси Oх прямоугольную трапецию OABC, где O(0; 0), A(0; r), В(Н; R), С(H; 0) (рис. 229).
 Рис. 229
Рис. 229
Прямая AВ проходит через точки (0; r) и (Н; R), поэтому её уравнение имеет вид у =  х + r. Следовательно, трапеция ОАВС ограничена графиком функции y =
х + r. Следовательно, трапеция ОАВС ограничена графиком функции y =  х + r (0 ⩽ х ⩽ Н), осью Oх и отрезками прямых х = 0 и х = Н. Поэтому, используя формулу (*) из п. 1.1 для объёма V усечённого конуса, получаем:
х + r (0 ⩽ х ⩽ Н), осью Oх и отрезками прямых х = 0 и х = Н. Поэтому, используя формулу (*) из п. 1.1 для объёма V усечённого конуса, получаем:
V =  dx.(1)
dx.(1)
Для вычисления интеграла сделаем замену переменных
 x + r = t.(2)
x + r = t.(2)
Тогда  dx = dt, откуда dx =
dx = dt, откуда dx =  dt. Новые пределы интегрирования (по переменной t) найдём посредством подстановки формулы (2): х = 0 ⇒ t = r; х = Н ⇒ t = R. Таким образом, для объёма V усечённого конуса получаем:
dt. Новые пределы интегрирования (по переменной t) найдём посредством подстановки формулы (2): х = 0 ⇒ t = r; х = Н ⇒ t = R. Таким образом, для объёма V усечённого конуса получаем:
что и требовалось доказать. ▼
б) Объём шарового слоя
В прямоугольной декартовой системе координат Оху рассмотрим криволинейную трапецию aABb, ограниченную дугой окружности х2 + у2 = R2, –R ⩽ a ⩽ х ⩽ b ⩽ R, отрезком [a; b] оси Ох и отрезками aА и bВ прямых соответственно x = a и х = b (рис. 230, а).
 Рис. 230
Рис. 230
При вращении криволинейной трапеции aАВb вокруг оси Ох образуется шаровой слой (рис. 230, б). Найдём его объём, применяя формулу (*) п. 1.1.
Из уравнения х2 + у2 = R2 имеем у2 = R2 – x2. Поэтому для вычисления объёма V шарового слоя получаем:
Таким образом, объём шарового слоя, отсекаемого от шара x2 + y2 + z2 ⩽ R2 радиуса R плоскостями x = a и x = b, вычисляется пo формуле
V =  (**)
(**)
Пусть радиусы оснований шарового слоя равны r1 и r2 (r1 > r2), а высота — H (см. рис. 230, a).
Тогда Н = b – a,  = R2 – a2,
= R2 – a2,  = R2 – b2.
= R2 – b2.
Формулу (**) преобразуем к виду:
V =  (3R2 – (b2 + ab + a2)) =
(3R2 – (b2 + ab + a2)) =
=  ((R2 – b2) + (R2 – ab) + (R2 – a2)).
((R2 – b2) + (R2 – ab) + (R2 – a2)).
Из системы равенств (b – a)2 = H2, R2 – a2 =  , R2 – b2 =
, R2 – b2 =  после почленного сложения их левых и правых частей находим:
после почленного сложения их левых и правых частей находим:
R2 – ab =  .
.
Тогда:
V =  ((R2 – b2) + (R2 – ab) + (R2 – a2)) =
((R2 – b2) + (R2 – ab) + (R2 – a2)) =
=  .
.
Таким образом, объём шарового слоя с радиусами оснований r1 и r2 и высотой Н вычисляется по формуле
V =  .(***)
.(***)
в) Объём шара

Рис. 231
При вращении полукруга х2 + у2 = R2 (расположенного в плоскости Оху, рис. 231, а) вокруг оси Ох образуется шар радиуса R (рис. 231, б). Из уравнения окружности х2 + y2 = R2 данного полукруга имеем у2 = R2 – х2. Тогда, полагая a = –R, b = R в формуле (*) п. 1.1, находим объём V шара радиуса R:
Vш =  =
=
=  .
.
Таким образом, имеет место следующая теорема.

Теорема 3 (об объёме шара). Объём шара радиуса R вычисляется по формуле
Vш =  .
.
г) Объём шарового сегмента
Если b = R (см. п. 1.2, б), то получаем криволинейную трапецию aAB (рис. 232, а), при вращении которой вокруг оси Ох образуется шаровой сегмент (рис. 232, б).

Рис. 232
Пусть высота шарового сегмента равна Н, тогда a = R – Н. Так как дуга AВ криволинейной трапеции aАВ является частью окружности x2 + y2 = R2 (в плоскости Оxу), то формулу объёма шарового сегмента получим по аналогии с выводом формулы для вычисления объёма шара, учитывая при этом, что пределы a и b интегрирования равны: a = R – H, b = R, т. е.
Vш. сегм =  =
=
= 
Таким образом, имеет место следующая теорема.

Теорема 4 (об объёме шарового сегмента). Объём шарового сегмента, отсекаемого от шара радиуса R и имеющего высоту Н, вычисляется по формуле
Vш. сегм = 
Если в формуле (***) п. 1.2, б положить r2 = 0, r1 = r, то получим формулу для вычисления объёма шарового сегмента с радиусом основания r и высотой Н:
Vш. сегм =  (3r2 + H2).
(3r2 + H2).
д) Объём шарового сектора

Рис. 233
Шаровой сектор состоит из конуса с вершиной в центре шара и шарового сегмента, имеющего с конусом общее основание (риc. 233). Пусть R = ОА — радиус шара; АС = r — радиус основания шарового сегмента, NC = H — его высота; N — точка сферы (рис. 233).
Найдём объёмы конуса и шарового сегмента, учитывая, что высота h конуса равна OC = ON – CN = R – Н.
Объём Vк конуса равен
 π•АС2•ОС =
π•АС2•ОС =  πr2 (R – Н).
πr2 (R – Н).
Выразим r2 через R и H.
B прямоугольном треугольнике AOC находим r2 = AC2 = ОА2 – OC2 = R2 – (R – H)2 = H(2R – H).
Значит,
Vк =  πH(2R – H)(R – H) =
πH(2R – H)(R – H) =  (2R2 – 3RH + H2).
(2R2 – 3RH + H2).
Для объёма шарового сегмента имеем:
Vш. сегм =  (3AC2 + NC2) =
(3AC2 + NC2) =  (3H(2R – H) + H2) =
(3H(2R – H) + H2) =
=  (3RН – H2).
(3RН – H2).
Тогда для объёма шарового сектора получаем
Vш. сект = Vк + Vш. сегм =
=  (2R2 – 3RH + H2) +
(2R2 – 3RH + H2) +  (3RH – H2) =
(3RH – H2) =  πR2H.
πR2H.
Таким образом, доказана следующая теорема.

Теорема 5 (об объёме шарового сектора). Объём шарового сектора шара радиуса R вычисляется по формуле
Vш. сект =  R2H,
R2H,
где Н — длина высоты шарового сегмента, соответствующего данному шаровому сектору.
В курсе математического анализа, который вам предстоит изучать в высшей школе, будет дано строгое обоснование применения определённого интеграла не только для нахождения объёмов тел, но и для нахождения площадей поверхностей и длин дуг линий. Решите самостоятельно следующие задачи.
1)Найдите объём тела, которое получается при вращении вокруг оси Ох криволинейной трапеции, ограниченной гиперболой у =  , прямыми х = 3, х = 12 и осью абсцисс. (Ответ: 4π.)
, прямыми х = 3, х = 12 и осью абсцисс. (Ответ: 4π.)
2)Найдите объём тела, образованного вращением вокруг оси Oх фигуры, ограниченной одной полуволной синусоиды у = sin x и отрезком 0 ⩽ х ⩽ π оси абсцисс. (Ответ: 0,5π2.)
3)Найдите объём тела, полученного при вращении кривой у = 0,25х2 вокруг оси Оу в пределах от у = 1 до у = 5. (Ответ: 48π.)
4)Найдите объём тела, образованного вращением вокруг оси Ох фигуры, ограниченной кривыми у = 2х2 и у = x3. 
Определение
3. Тело
вращения – это тело, полученное вращением
плоской фигуры ![]() вокруг оси, не
вокруг оси, не
пересекающей фигуру и лежащей с ней в
одной плоскости.
Ось вращения может
и пересекать фигуру, если это ось
симметрии фигуры.
Теорема
2. Пусть
криволинейная трапеция, ограниченная
графиком непрерывной неотрицательной
функции
![]() ,
,
осью![]() и отрезками прямых
и отрезками прямых![]() и
и![]()
![]() вращается вокруг оси
вращается вокруг оси![]() .
.
Тогда объём получающегося тела вращения
можно вычислить по формуле
![]()
(2)
Доказательство.
Для такого тела сечение с абсциссой
![]() – это круг радиуса
– это круг радиуса![]() ,
,
значит![]() и формула (1) даёт требуемый результат.
и формула (1) даёт требуемый результат.
Если фигура
ограничена графиками двух непрерывных
функций
![]() и
и![]() ,
,
и отрезками прямых![]() и
и![]() ,
,
причём![]() и
и![]() ,
,
то при вращении вокруг оси абсцисс
получим тело, объём которого
![]()
Пример
3. Вычислить
объём тора, полученного вращением круга,
ограниченного окружностью ![]()
![]() вокруг оси абсцисс.
вокруг оси абсцисс.
Р ешение.
ешение.
Указанный круг снизу ограничен графиком
функции
![]() ,
,
а сверху –![]() .
.
Разность квадратов этих функций:

Искомый объём
![]()
(графиком
подынтегральной функции является
верхняя полуокружность, поэтому
написанный выше интеграл – это площадь
полукруга).
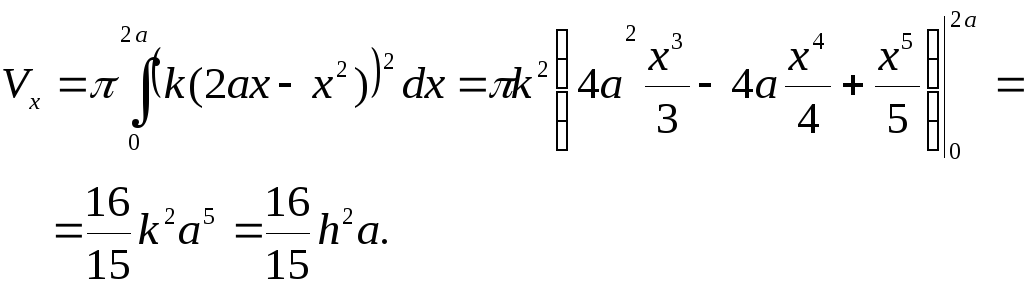
Пример 4.
Параболический сегмент с основанием
![]() ,
,
и высотой![]() ,
,
вращается вокруг основания. Вычислить
объём получающегося тела («лимон»
Кавальери).
Р ешение.
ешение.
Параболу расположим как показано на
рисунке. Тогда её уравнение
![]() ,
,
причем![]() .
.
Найдём значение параметра![]() :
:![]() .
.
Итак, искомый объём:
Теорема
3. Пусть
криволинейная трапеция, ограниченная
графиком непрерывной неотрицательной
функции
![]() ,
,
осью![]() и отрезками прямых
и отрезками прямых![]() и
и![]() ,
,
причём![]() ,
,
вращается вокруг оси![]() .
.
Тогда объём получающегося тела вращения
может быть найден по формуле
![]() (3)
(3)
 Идея
Идея
доказательства.
Разбиваем отрезок
![]() точками
точками![]()
![]() ,
,
на части и проводим прямые![]() .
.
Вся трапеция разложится на полоски,
которые можно считать приближенно
прямоугольниками с основанием![]() и высотой
и высотой![]() .
.
Получающийся при
вращении такого прямоугольника цилиндр
разрежем по образующей и развернём.
Получим «почти» параллелепипед с
размерами:
![]() ,
,![]() и
и![]() .
.
Его объём![]() .
.
Итак, для объёма тела вращения будем
иметь приближенноё равенство
![]()
Для получения
точного равенства надо перейти к пределу
при ![]() .
.
Написанная выше сумма есть интегральная
сумма для функции ![]() ,
,
следовательно, в пределе получим интеграл
из формулы (3). Теорема доказана.
Замечание
1. В теоремах
2 и 3 условие
![]() можно опустить: формула (2) вообще
можно опустить: формула (2) вообще
нечувствительна к знаку![]() ,
,
а в формуле (3) достаточно![]() заменить на
заменить на![]() .
.
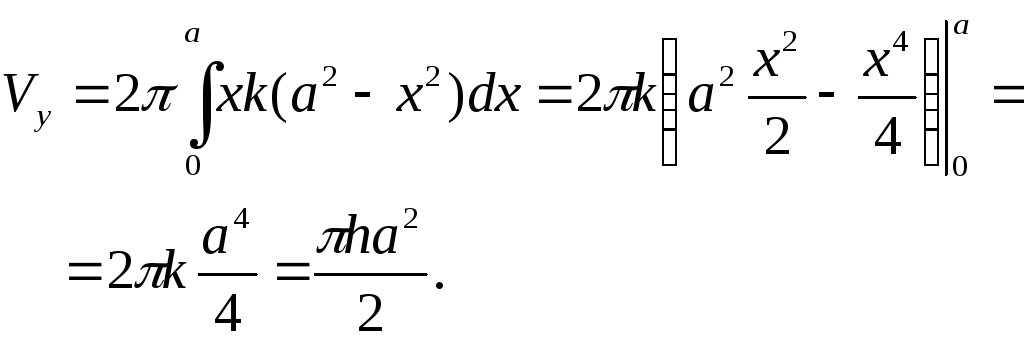
Пример
5.
Параболический сегмент (основание
![]() ,
,
высота![]() )
)
вращается вокруг высоты. Найти объём
получающегося тела.
 Решение.
Решение.
Расположим
параболу как показано на рисунке. И хотя
ось вращения пересекает фигуру, она –
ось – является осью симметрии. Поэтому
надо рассматривать лишь правую половину
сегмента. Уравнение параболы
![]() ,
,
причем![]() ,
,
значит![]() .
.
Имеем для объёма:
Замечание
2. Если
криволинейная граница криволинейной
трапеции задана параметрическими
уравнениями
![]() ,
,![]() ,
,![]() и
и![]() ,
,![]() то можно использовать формулы (2) и (3) с
то можно использовать формулы (2) и (3) с
заменой![]() на
на![]() и
и![]() на
на![]() при измененииt
при измененииt
от
![]() до
до![]() .
.
Пример
6. Фигура
ограничена первой аркой циклоиды
![]() ,
,![]() ,
,![]() ,
,
и осью абсцисс. Найти объём тела,
полученного вращением этой фигуры
вокруг: 1) оси![]() ;
;
2) оси![]() .
.
Решение.
1) Общая формула
![]() В нашем случае:
В нашем случае:
![]()
2) Общая формула
![]() Для нашей фигуры:
Для нашей фигуры:
![]()
Предлагаем
студентам самостоятельно провести все
вычисления.
Замечание
3. Пусть
криволинейный сектор, ограниченный
непре-рывной линией
![]() и лучами
и лучами![]() ,
,![]()
![]() ,
,
вращается вокруг полярной оси. Объём
получающегося тела можно вычислить по
формуле.
![]()
Пример
7. Часть
фигуры, ограниченной кардиоидой
![]() ,
,
лежащая вне окружности![]() ,
,
вращается вокруг полярной оси. Найти
объём тела, которое при этом получается.
 Решение.
Решение.
Обе линии, а значит и фигура, которую
они ограничивают, симметричны относительно
полярной оси. Поэтому необходимо
рассматривать лишь ту часть, для которой
![]() .
.
Кривые пересекаются при![]() и
и
![]() при
при
![]() .
.
Далее, фигуру можно рассматривать как
разность двух секторов, а значит и объём
вычислять как разность двух интегралов.
Имеем:
Задачи
для самостоятельного решения.
1. Круговой сегмент,
основание которого ![]() ,
,
высота
![]() ,
,
вращается вокруг основания. Найти объём
тела вращения.
2. Найти объём
параболоида вращения, основание которого
![]() ,
,
а высота равна![]() .
.
3. Фигура, ограниченная
астроидой
![]() ,
,![]() вращает-ся вокруг оси абсцисс. Найти
вращает-ся вокруг оси абсцисс. Найти
объём тела, которое получается при этом.
4. Фигура, ограниченная
линиями
![]() и
и![]() вращается вокруг оси абсцисс. Найти
вращается вокруг оси абсцисс. Найти
объём тела вращения.
Соседние файлы в папке Лекции по мат.анализу
- #
- #
- #
- #
- #
- #
- #
Тела и поверхности вращения. Шар. Цилиндр. Конус
Тела и поверхности вращения.
Шар. Цилиндр. Конус. Площади поверхности и объемы этих фигур.
Подробная теория с наглядными иллюстрациями и основные формулы.
Читай эту статью, здесь все это есть.
Всего за 15 минут ты полностью во всём разберешься!
Тело вращения – это тело в пространстве, которое возникает при вращении какой-нибудь плоской фигуры вокруг какой-нибудь оси.
Вот самый простой пример: цилиндр.
Берем прямоугольник и начинаем вращать его вокруг одной из сторон.
Смотри.
Было–вращаем–стало:
А теперь гораздо хитрее. Бывает так, что ось вращения находится далеко от фигуры, которая вращается.
Например, так:
Вращаем:
Что получится? Бублик. А по-научному – ТОР.
Ну и так вот можно любую фигуру вертеть вокруг любой оси, и будут получаться разные более или менее сложные тела вращения.
Ну, а поверхность вращения – это просто граница тела вращения. Ведь поверхность это всегда граница тела.
Здесь мы рассмотрим подробно несколько тел вращения. Те, которые встречаются в школьных задачах. Это шар, цилиндр и конус.
Шар
Шар – тело вращения, полученное вращением полуокружности вокруг диаметра.
Было–вращаем–стало:
Вообще-то есть и другое определение шара – через ГМТ (геометрическое место точек)
Шар – геометрическое место точек, удаленных от одной фиксированной точки на расстояние, не более заданного.
Скажу тебе по секрету, что, хоть второе определение и пугающее на вид, оно удобнее в обращении. Задумайся, ведь если тебя попросят сказать, что такое шар, ты скажешь что-то вроде:
«ну …там есть центр и радиус…», подразумевая, что все точки внутри шара находятся я на расстоянии не большем, чем радиус.
Ну, в общем, шар он и есть шар.
Названия, которые ты должен знать:
Незнакомое тебе, наверное, только одно.
Диаметральное сечение шара – сечение, проходящее через центр. Это сечение иногда еще называют большим кругом.
А вообще:
- Любое сечение шара – круг.
- Граница шара называется сфера. (Так же, как граница круга – окружность.)
Площадь поверхности сферы
( {{S}_{поверхности }}=4pi {{R}^{2}})
( R) – радиус
Откуда взялось? Умные математики придумали – это не так уж просто – придется просто запомнить.
Объем шара
( {{V}_{шара}}=frac{4}{3}pi {{R}^{3}})
( R) – радиус
Это еще одна хитрая формула, которую придется запомнить, не понимая, откуда она взялась.
Если ты знаком с производной, то можешь заметить это:
( {{V’}_{шара}}={{S}_{поверхности}})
И это не случайно! Но почему это так вышло, мы тоже здесь обсуждать не будем. Можешь попробовать доказать это сам!
Цилиндр
Цилиндр – тело, образованное вращением прямоугольника вокруг одной из сторон.
Вообще-то, полное имя этого тела – «прямой круговой цилиндр», но составители задач и мы вместе с ними по дружбе называем его просто цилиндром. Названия, относящиеся к цилиндру, такие:
Основания у цилиндра – это круги
Еще у цилиндра есть так называемая развертка.
Представь, что у нас от цилиндра осталась только боковая поверхность, и мы ее разрезали вдоль образующей и развернули.
Что получится? Представь себе, прямоугольник.
Развертка цилиндра – прямоугольник.
Площадь боковой поверхности цилиндра
( {{S}_{бок.}}=2pi RH)
( R) – радиус
( H) – высота, она же образующая.
Откуда взялась эта формула? Это как раз легко! Именно потому, что цилиндр можно развернуть, и получится прямоугольник ( 2pi Rcdot H).
Площадь этого прямоугольника и есть площадь боковой поверхности цилиндра.
Площадь прямоугольника, как мы хорошо помним равна произведению сторон, поэтому
( {{S}_{бок.}}=2pi RH)
Площадь полной поверхности цилиндра
Прибавляем теперь площадь двух кругов – оснований и получаем:
( {{S}_{полн .}}=2pi RH+2pi {{R}^{2}})
Можно вынести (хотя и не обязательно) ( 2pi R):
( {{S}_{полн .}}=2pi Rleft( H+R right))
Но эту формулу неудобно запоминать!
Гораздо проще запомнить, что полная поверхность – сумма боковой поверхности и еще двух кругов – оснований, а боковая поверхность – прямоугольник. И тогда ( {{S}_{полн .}}) можно вообще не запоминать, ты всегда сам напишешь, что
( {{S}_{полн .}}=underbrace{2pi RH}_{прямоугольник}+underbrace{2pi {{R}^{2}}}_{два круга})
Объем цилиндра
( V=pi {{R}^{2}}H)
( R) – радиус основания ( H) – высота
Это точно как у призмы и параллелепипеда!
( V={{S}_{основания}}cdot H), только у призмы и параллелепипеда ( {{S}_{основания}}) — это площадь многоугольника, а у цилиндра ( {{S}_{основания}}) — это площадь круга.
Конус
Конус – тело вращения, образованное вращением прямоугольного треугольника вокруг одного из катетов.
Было–вращаем–стало:
И опять же, полное название этого тела: «прямой круговой конус», но во всех задачах у нас говорится просто «конус».
Названия, относящиеся к конусу:
Что тут нужно твердо помнить?
- Основание корпуса – круг
- Все образующие конуса – равны.
Ясно ли это? Вроде должно быть ясно, ведь образующая – это гипотенуза (одна и та же!) Треугольника, который вращаем, а радиус основания – катет.
У конуса тоже есть развертка.
Снова представим, что основания нет, разрежем боковую поверхность вдоль образующей и развернём кулек. Что получится?
Представь себе сектор круга. Пусть длина образующей равна ( l).
Развертка конуса – сектор круга радиуса ( l)
Площадь поверхности конуса
Как найти площадь боковой поверхности корпуса? Вспомним о развертке, ведь для цилиндра все было просто именно с помощью развертки.
По формуле площади сектора ( {{S}_{бок.}}={{l}^{2}}cdot frac{alpha }{2}) Где ( alpha ) – угол при вершине в радианах.
И это уже формула. В некоторых задачах бывает дан именно угол при вершине в развертке конуса.
Но если все же даны только образующая и радиус основания, как быть?
Нужно осознать, что же такое дуга в развертке? Это бывшая окружность основания! Поэтому длина этой дуги равна ( 2pi R).
С другой стороны, длина этой же дуги равна ( alpha cdot l), так как это дуга окружности радиуса ( l). Поэтому
( alpha cdot l=2pi R)
Подставляем
( {{S}_{бок.}}={{l}^{2}}cdot frac{alpha }{2}=frac{l}{2}cdot alpha cdot l=frac{l}{2}cdot 2pi R)
Итак,
( {{S}_{бок.}}=pi Rl), где
( R) — радиус окружности основания,
( l) — длина образующей
Ну, и осталось площадь полной поверхности конуса. Прибавим к боковой поверхности площадь круга основания, и получаем:
( {{S}_{полн. }}=pi Rl+pi {{R}^{2}})
Можно вынести ( pi R):
( {{S}_{полн. }}=pi Rleft( l+R right))
Но, как и для цилиндра, не надо запоминать вторую формулу, гораздо проще всегда пользоваться первой.
Объём конуса
( V=frac{1}{3}pi {{R}^{2}}H)
( R) – радиус основания (
H) – высота
Это так же, как у пирамиды
( V=frac{1}{3}{{S}_{осн.}}cdot H), только
( {{S}_{осн. }}) — это не площадь многоугольника, а площадь круга.
А вот откуда взялась ( frac{1}{3})?, по-прежнему остается загадкой, потому что эта ( frac{1}{3}) получена в результате довольно хитрых рассуждений умных математиков.
А тебе нужно очень твердо запомнить, что в формулах объёма «треугольных» фигур: конуса и пирамиды эта ( frac{1}{3}) и есть, а в формулах параллелепипеда, призмы и цилиндра ее нет!
Бонус: Вебинары по стереометрии из нашего курса подготовки к ЕГЭ по математике
ЕГЭ 14 Стереометрия. Расстояние между точками и от точки до прямой
В этом видео мы научимся «видеть» 3-мерное пространство и изображать 3-мерные объекты на бумаге (то есть на плоской поверхности).
Затем мы научимся двум основным вещам — находить расстояние между точками на таких рисунках, а также расстояние от точки до прямой.
На этих умениях строится всё дальнейшее изучение стереометрии. В общем это очень важное, базовое видео, с которого нужно начинать изучение стереометрии.
Не перескакивайте, не пропускайте его! Даже если вы знаете стереометрию, вы найдете для себя очень много полезного и нового в этом видео.
ЕГЭ 14. Стереометрия. Пирамида. Разбор варианта профильного ЕГЭ 2020
В этом видео:
- Как нарисовать шестиугольную пирамиду.
- Как подписать вершины пирамиды чтобы потом легче было решать задачу.
- Как исправить рисунок, если грани пирамиды сливаются.
- Доказательство пунктов А и Б, а также их правильная запись, которую примет любой проверяющий на ЕГЭ.
- Нахождение площади основания и объема пирамиды.
- Самое главное, на что нужно обратить внимание.
Самые бюджетные курсы по подготовке к ЕГЭ на 90+
![]()
Алексей Шевчук — ведущий мини-групп
математика, информатика, физика
+7 (905) 541-39-06 — WhatsApp/Телеграм для записи
alexei.shevchuk@youclever.org — email для записи
- тысячи учеников, поступивших в лучшие ВУЗы страны
- автор понятного всем учебника по математике ЮКлэва (с сотнями благодарных отзывов);
- закончил МФТИ, преподавал на малом физтехе;
- репетиторский стаж — c 2003 года;
- в 2021 году сдал ЕГЭ (математика 100 баллов, физика 100 баллов, информатика 98 баллов — как обычно дурацкая ошибка:);
- отзыв на Профи.ру: «Рейтинг: 4,87 из 5. Очень хвалят. Такую отметку получают опытные специалисты с лучшими отзывами».

Образование поверхности вращения
Тела вращения — объёмные тела, возникающие при вращении плоской геометрической фигуры, ограниченной кривой, вокруг оси, лежащей в той же плоскости[1].
Примеры тел вращения[править | править код]
- Шар — образован полукругом, вращающимся вокруг диаметра разреза
- Цилиндр — образован прямоугольником, вращающимся вокруг одной из сторон
За площадь боковой поверхности цилиндра принимается площадь его развёртки:
 .
.

- Конус — образован прямоугольным треугольником, вращающимся вокруг одного из катетов
За площадь боковой поверхности конуса принимается площадь его развертки:
- .

Площадь полной поверхности конуса:
- .

- Тор — образован окружностью, вращающейся вокруг прямой, не пересекающей его[2]
При вращении контуров фигур возникает поверхность вращения (например, сфера, образованная окружностью), в то время как при вращении заполненных контуров возникают тела (как шар, образованный кругом).
Объём тел вращения[править | править код]
Вращение вокруг оси x[править | править код]

Объём тела, образуемого вращением вокруг оси  фигуры, ограниченной графиком функции
фигуры, ограниченной графиком функции  на интервале
на интервале ![[a;b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/68e776d74130a8890a814c1f4e74372a9110d2f9) , осью и прямыми
, осью и прямыми  и
и  , равен:
, равен:

Вращение вокруг оси y[править | править код]

Объём тела, образуемого вращением вокруг оси  фигуры, ограниченной графиком функции на интервале , осью и прямыми и , равен:
фигуры, ограниченной графиком функции на интервале , осью и прямыми и , равен:

Теорема Гульдина[править | править код]
Объём и площадь поверхности тел вращения можно также узнать при помощи теорем Гульдина-Паппа, которые связывают площадь или объём с центром масс фигуры.
- Первая теорема Гульдина-Паппа гласит:
Площадь поверхности, образуемой при вращении линии, лежащей в плоскости целиком по одну сторону от оси вращения, равна произведению длины линии на длину окружности, пробегаемой центром масс этой линии.
- Вторая теорема Гульдина-Паппа гласит:
Объём тела, образуемого при вращении фигуры, лежащей в плоскости целиком по одну сторону от оси вращения, равен произведению площади фигуры на длину окружности, пробегаемой центром масс этой фигуры.
Литература[править | править код]
А. В. Погорелов. «Геометрия. 10-11 класс» § 21.Тела вращения. — 2011
Примечания[править | править код]
- ↑ А. В. Погорелов. §21. Тела вращения // Геометрия. 10-11 класс. — 2011.
- ↑ Математика. Энциклопедия для детей том 11й ISBN 5-94623-072-7
Ссылки[править | править код]
Для кинематического описания процесса вращения твердого тела нужно ввести такие понятия как угловое перемещение Δφ, угловое ускорение ε и угловая скорость ω:
ω=∆φ∆t, (∆t→0),ε=∆φ∆t, (∆t→0).
Углы выражаются в радианах. За положительное направление вращения принимается направление против часовой стрелки.
Когда твердое тело вращается относительно неподвижной оси, все точки этого тела перемещаются с одинаковыми угловыми скоростями и ускорениями.

Рисунок 1. Вращение диска относительно оси, проходящей через его центр O.
Если угловое перемещение Δφ мало, то модуль вектора линейного перемещения ∆s→ некоторого элемента массы Δm вращающегося твердого тела можно выразить соотношением:
∆s=r∆ϕ,
в котором r – модуль радиус-вектора r→.
Между модулями угловой и линейной скоростей можно установить связь посредством равенства
v=rω.
Модули линейного и углового ускорения также взаимосвязаны:
a=aτ=rε.
Векторы v→ и a→=aτ→ направлены по касательной к окружности радиуса r.
Также нам необходимо учесть возникновение нормального или центростремительного ускорения, которое всегда возникает при движении тел по окружности.
Модуль ускорения выражается формулой:
an=v2r=ω2r.
Если разделить вращающееся тело на небольшие фрагменты Δmi, обозначить расстояние до оси вращения через ri, а модули линейных скоростей через vi, то запись формулы кинестетической энергии вращающегося тела будет иметь вид:
Ek=∑iνmvi22=∑i∆m(riω)22=ω22∑i∆miri2.
Физическая величина ∑i∆miri2 носит название момента инерции I тела относительно оси вращения. Она зависит от распределения масс вращающегося тела относительно оси вращения:
I=∑i∆miri2.
В пределе при Δm→0 эта сумма переходит в интеграл. Единица измерения момента инерции в СИ – килограмм–метр в квадрате (кг·м2). Таким образом, кинетическую энергию твердого тела, вращающегося относительно неподвижной оси, можно представить в виде:
Ek=Iω22.
В отличие от выражения, которое мы использовали для описания кинестетической энергии поступательно движущегося тела mv22, вместо массы m в формулу входит момент инерции I. Также мы принимаем во внимание вместо линейной скорости v угловую скорость ω.
Если для динамики поступательного движения основную роль играет масса тела, то в динамике вращательного движения имеет значение момент инерции. Но если масса – это свойство рассматриваемого твердого тела, которое не зависит от скорости движения и других факторов, то момент инерции зависит от того, вокруг какой оси вращается тело. Для одного и того же тела момент инерции будет определяться различными осями вращения.
В большинстве задач считается, что ось вращения твердого тела проходит через центр его массы.
Положение xC, yC центра масс для простого случая системы из двух частиц с массами m1 и m2, расположенными в плоскости XY в точках с координатами x1, y1 и x2, y2 определяется выражениями:
xC=m1x1+m2x2m1+m2, yC=m1y1+m2y2m1+m2.

Рисунок 2. Центр масс C системы из двух частиц.
В векторной форме это соотношение принимает вид:
rC→=m1r1→+m2r2→m1+m2.
Аналогично, для системы из многих частиц радиус-вектор rC→ центра масс определяется выражением
rC→=∑miri→∑mi.
Если мы имеем дело с твердым телом, состоящим из одной части, то в приведенном выражении суммы для rC→ необходимо заменить интегралами.
Центр масс в однородном поле тяготения совпадает с центром тяжести. Это значит, что если мы возьмем тело сложной формы и подвесим его за центр масс, то в однородном поле тяготения это тело будет находиться в равновесии. Отсюда следует способ определения центра масс сложного тела на практике: его необходимо последовательно подвесить за несколько точек, одновременно отмечая по отвесу вертикальные линии.

Рисунок 3. Определение положения центра масс C тела сложной формы. A1, A2, A3 точки подвеса.
На рисунке мы видим тело, которое подвешено за центр масс. Оно находится в состоянии безразличного равновесия. В однородном поле тяготения равнодействующая сил тяжести приложена к центру масс.
Мы можем представить любое движение твердого тела как сумму двух движений. Первое поступательное, которое производится со скоростью центра масс тела. Второе – это вращение относительно оси, которая проходит через центр масс.
Предположим. Что у нас есть колесо, которое катится по горизонтальной поверхности без проскальзывания. Все точки колеса во время движения перемещаются параллельно одной плоскости. Такое движение мы можем обозначить как плоское.
Теорема о движении центра масс
Кинестетическая энергия вращающегося твердого тела при плоском движении будет равна сумме кинетической энергии поступательного движения и кинетической энергии вращения относительно оси, которая проведена через центр масс и располагается перпендикулярно плоскостям, в которых движутся все точки тела:
Ek=mvC22+ICω22,
где m – полная масса тела, IC – момент инерции тела относительно оси, проходящей через центр масс.

Рисунок 4. Качение колеса как сумма поступательного движения со скоростью vC→ и вращения с угловой скоростью ω=vCR относительно оси O, проходящей через центр масс.
В механике используется теорема о движении центра масс.
Любое тело или несколько взаимодействующих тел, которые представляют собой единую систему, обладают центром масс. Этот центр масс под воздействием внешних сил перемещается в пространстве как материальная точка, в которой сосредоточена вся масса системы.
На рисунке мы изобразили движение твердого тела, на которое действуют силы тяжести. Центр масс тела движется по траектории, которая близка к параболе, тогда как траектория остальных точек тела является более сложной.

Рисунок 5. Движение твердого тела под действием силы тяжести.
Теорема Штейнера о параллельном переносе оси вращения
Рассмотрим случай, когда твердое тело движется вокруг некоторой неподвижной оси. Момент инерции этого тела инерции I можно выразить через момент инерции IC этого тела относительно оси, проходящей через центр масс тела и параллельной первой.

Рисунок 6. К доказательству теоремы о параллельном переносе оси вращения.
Для примера возьмем твердое тело, форма которого произвольна. Обозначим центр масс С. Выберем систему координат ХУ с началом координат 0. Совместим центр масс и начало координат.
Одна из осей проходит через центр масс С. Вторая ось пересекает произвольно выбранную точку Р, которая расположена на расстоянии d от начала координат. Выделим некоторый малый элемент массы данного твердого тела Δmi.
По определению момента инерции:
IC=∑∆mi(xi2+yi2),IP=∑mi(xi-a)2+yi-b2
Выражение для IP можно переписать в виде:
IP=∑∆mi(xi2+yi2)+∑∆mi(a2+b2)-2a∑∆mixi-2b∑∆miyi.
Два последних члена уравнения обращаются в нуль, так как начало координат в нашем случае совпадает с центром масс тела.
Так мы пришли к формуле теоремы Штейнера о параллельном переносе оси вращения.
Для тела, которое вращается относительно произвольной неподвижной оси, момент инерции, согласно теореме Штейнера, равен сумме момента инерции этого тела относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями.
IP=IC+md2,
где m – полная масса тела.

Рисунок 7. Модель момента инерции.
На рисунке ниже изображены однородные твердые тела различной формы и указаны моменты инерции этих тел относительно оси, проходящей через центр масс.

Рисунок 8. Моменты инерции IC некоторых однородных твердых тел.
Основное уравнение динамики вращательного движения твердого тела
В тех случаях, когда мы имеем дело с твердым телом, которое вращается относительно неподвижной оси, мы можем обобщить второй закон Ньютона. На рисунке ниже мы изобразили твердое тело произвольной формы, вращающееся относительно некоторой оси, проходящей через точку О. Ось вращения расположена перпендикулярно плоскости рисунка.
Δmi – это произвольный малый элемент массы, на который оказывают воздействие внешние и внутренние силы. Равнодействующая всех сил есть Fi→. Ее можно разложить на две составляющие: касательную составляющую Fiτ→ и радиальную Fir→. Радиальная составляющая Fir→ создает центростремительное ускорение an.

Рисунок 9. Касательная Fiτ→ и радиальная Fir→ составляющие силы Fi→ действующей на элемент Δmi твердого тела.
Касательная составляющая Fiτ→ вызывает тангенциальное ускорение aiτ→ массы Δmi. Второй закон Ньютона, записанный в скалярной форме, дает
∆miaiτ=Fiτsin θ или ∆miriε=Fisin θ,
где ε=aiτri – угловое ускорение всех точек твердого тела.
Если обе части написанного выше уравнения умножить на ri, то мы получим:
∆miri2ε=Firisin θ=Fili=Mi.
Здесь li – плечо силы, Fi,→Mi – момент силы.
Теперь нужно аналогичные соотношения записать для всех элементов массы Δmi вращающегося твердого тела, а затем просуммировать левые и правые части. Это дает:
∑∆miri2ε=∑Mi.
Стоящая в правой части сумма моментов сил, действующих на различные точки твердого тела, состоит из суммы моментов всех внешних сил и суммы моментов всех внутренних сил.
∑M=∑Miвнешн+∑Miвнутр.
Но сумма моментов всех внутренних сил согласно третьему закону Ньютона равна нулю, поэтому в правой части остается только сумма моментов всех внешних сил, которые мы будем обозначать через M. Так мы получили основное уравнение динамики вращательного движения твердого тела.
Угловое ускорение ε и момент сил M в этом уравнении являются величинами алгебраическими.
Iε=M
Обычно за положительное направление вращения принимают направление против часовой стрелки.
Возможна и векторная форма записи основного уравнения динамики вращательного движения, при которой величины ω→, ε→, M→ определяются как векторы, направленные по оси вращения.
Закон сохранения момента импульса
В разделе, посвященном поступательному движению тела, мы ввели понятие импульса тела p→. По аналогии с поступательным движением для вращательного движения мы вводим понятие момента импульса.
Момент импульса вращающегося тела – это физическая величина, которая равняется произведению момента инерции тела I на угловую скорость ω его вращения.
Для обозначения момента импульса используется латинская буква L.
L=lω
Поскольку ε=∆ω∆t; ∆t→0, уравнение вращательного движения можно представить в виде:
M=Iε=I∆ω∆t или M∆t=I∆ω=∆L.
Получаем:
M=∆L∆t; (∆t→0).
Мы получили это уравнение для случая, когда I = const. Но оно будет справедливо и тогда, когда момент инерции тела будет изменяться в процессе движения.
Если суммарный момент M внешних сил, действующих на тело, равен нулю, то момент импульса L=Iω относительно данной оси сохраняется: ∆L=0, если M=0.
Следовательно,
L=lω=const.
Так мы пришли к закону сохранения момента импульса.
В качестве примера приведем рисунок, на котором изображено неупругое вращательное столкновение дисков, которые насажены на общую для них ось.

Рисунок 10. Неупругое вращательное столкновение двух дисков. Закон сохранения момента импульса: I1ω1=(I1+I2)ω.
Мы имеем дело с замкнутой системой. Для любой замкнутой системы закон сохранения момента импульса будет справедливым. Он выполняется и в условиях экспериментов по механике, и в условиях космоса, когда планеты движутся по своим орбитам вокруг звезды.
Мы можем записать уравнение динамики вращательного движения как для неподвижной оси, так и для оси, которая перемещается равномерно или с ускорением. Вид уравнения не изменится и в том случае, если ось движется ускоренно. Для этого должно выполняться два условия: ось должна проходить через центр массы тела, а ее направление в пространстве остается неизменным.
Предположим, что у нас есть тело (шар или цилиндр), которое катится по наклонной плоскости с некоторым трением.

Рисунок 11. Качение симметричного тела по наклонной плоскости.
Ось вращения O проходит через центр масс тела. Моменты силы тяжести mg→ и силы реакции N→ относительно оси O равны нулю. Момент M создает только сила трения: M = FтрR.
Уравнение вращательного движения:
ICε=ICaR=M=FтрR,
где ε – угловое ускорение катящегося тела, a – линейное ускорение его центра масс, IC – момент инерции относительно оси O, проходящей через центр масс.
Второй закон Ньютона для поступательного движения центра масс записывается в виде:
ma=mg sin α-Fтр.
Исключая из этих уравнений Fтр, получим окончательно:
α=mg sin θICR2+m.
Из этого выражения видно, что быстрее будет скатываться с наклонной плоскости тело, обладающее меньшим моментом инерции. Например, у шара IC=25mR2, а у сплошного однородного цилиндра IC=12mR2. Следовательно, шар будет скатываться быстрее цилиндра.
