В механике существуют два типа величин:
- скалярные величины, задающие некоторое числовое значение – время, температура, масса и т.д.
- векторные величины, которые вместе с некоторым числовым значением задают направление – скорость, сила и т.д..
Рассмотрим сначала алгебраический подход к сложению векторов.
Покоординатное сложение векторов.
Пусть даны два вектора, заданные покоординатно ( чтобы вычислить координаты вектора, нужно вычесть из соответствующих координат его конца соответствующие координаты его начала, т.е. из первой координаты – первую, из второй – вторую и т.д.):
Тогда координаты вектора, получившегося при сложении этих двух векторов вычисляются по формуле:
В двумерном случае все абсолютно анологично, просто отбрасываем третью координату.
Теперь перейдем к геометрическому смыслу сложения двух векторов:
При сложении векторов нужно учитывать и их числовые значения, и направления. Есть несколько широко используемых методов сложения:
- правило параллелограмма
- правило треугольника
- тригонометрический способ
Правило параллелограмма. Сложение векторов по правилу параллелограмма. |
|
 |
Процедура сложения векторов по правилу параллелограмма заключается в следующем:
|
Правило треугольника. Сложение векторов по правилу треугольника. |
|
 |
Сложение векторов по правилу треугольника заключается в следующем:
|
Тригонометрический способ. Сложение векторов тригонометрическим способом. |
|
 |
Результирующий вектор сложения двух компланарных векторов может быть вычислен с помощью теоремы косинусов:
Угол между результирующим вектором и одним из исходных векторов может быть вычислен по теореме синусов:
|
Пример – сложение векторов.
Сила 1 равна 5кН и воздействует на тело в направлении, на 80o отличающемся от направления действия второй силы, равной 8 кН.
Результирующая сила вычисляется следующим образом:
Fрез = [ (5 кН)2 + (8 кН)2 – 2 (5 кН)(8 kН) cos(180o – (80o)) ]1/2
= 10,14кН
Угол между результирующей силой и первой силой равен:
β= arcsin[ (8кН) sin(180o – (80o)) / (10,14кН) ]
= 51o
А угол между второй и результирующей силой можно посчитать следующим образом: as
α = arcsin [ (5 кН) sin(180o – (80o)) / (10,2 кН) ]
= 29o
Он-лайн калькулятор сложения векторов.
Калькулятор ниже может быть использован для любвых векторных величин ( силы, скорости и т.д.) Точка начала вектора совпадает с началами обоих исходных векторов.

Операции над векторами и их свойства: сложение и умножение
Прежде чем приступить к тематике статьи, напомним основные понятия.
Вектор – отрезок прямой, характеризующийся численным значением и направлением. Вектор обозначается строчной латинской буквой со стрелкой сверху. При наличии конкретных точек границ обозначение вектора выглядит как две прописные латинские буквы (маркирующие границы вектора) также со стрелкой сверху.
Нулевой вектор – любая точка плоскости, обозначается как нуль со стрелкой сверху.
Длина вектора – величина, равная или большая нуля, определяющая длину отрезка, составляющего вектор.
Коллинеарные векторы – лежащие на одной прямой или на параллельных прямых. Не выполняющие это условие векторы называют неколлинеарными.
Сложение двух векторов
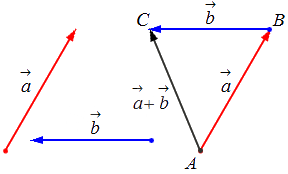
Исходные данные: векторы a → и b → . Для выполнения над ними операции сложения необходимо из произвольной точки отложить вектор A B → , равный вектору а → ; из полученной точки undefined – вектор В С → , равный вектору b → . Соединив точки undefined и C , получаем отрезок (вектор) А С → , который и будет являться суммой исходных данных. Иначе описанную схему сложения векторов называют правилом треугольника.
Геометрически сложение векторов выглядит так:
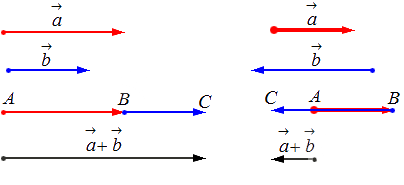
– для неколлинеарных векторов:
– для коллинеарных (сонаправленных или противоположнонаправленных) векторов:
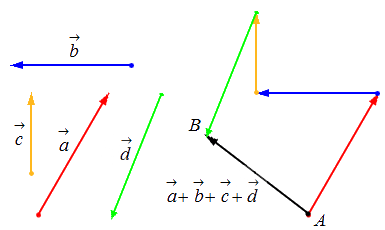
Сложение нескольких векторов
Взяв за основу описанную выше схему, мы получаем возможность произвести операцию сложения векторов в количестве более 2: поочередно прибавляя каждый последующий вектор.
Исходные данные: векторы a → , b → , c → , d → . Из произвольной точки А на плоскости необходимо отложить отрезок (вектор), равный вектору a → ; затем от конца полученного вектора откладывается вектор, равный вектору b → ; далее – по тому же принципу откладываются последующие векторы. Конечной точкой последнего отложенного вектора будет точка B , а полученный отрезок (вектор) A B → – суммой всех исходных данных. Описанную схему сложения нескольких векторов называют также правилом многоугольника .
Геометрически оно выглядит следующим образом:
Отдельной схемы действия по вычитанию векторов нет, т.к. по сути разность векторов a → и b → есть сумма векторов a → и – b → .
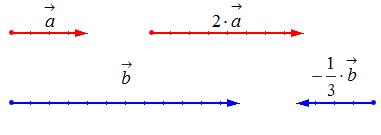
Умножение вектора на число
Чтобы произвести действие умножения вектора на некое число k , необходимо учитывать следующие правила:
– если k > 1 , то это число приведет к растяжению вектора в k раз;
– если 0 k 1 , то это число приведет к сжатию вектора в 1 k раз;
– если k 0 , то это число приведет к смене направления вектора при одновременном выполнении одного из первых двух правил;
– если k = 1 , то вектор остается прежним;
– если одно из множителей – нулевой вектор или число, равное нулю, результатом умножения будет нулевой вектор.
Исходные данные:
1) вектор a → и число k = 2 ;
2) вектор b → и число k = – 1 3 .
Геометрически результат умножения в соответствии с указанными выше правилами будет выглядеть следующим образом:
Свойства операций над векторами
Описанным выше операциям над векторами присущи свойства, некоторые из которых очевидны, а прочие можно обосновать геометрически.
Исходные данные: векторы a → , b → , c → и произвольные действительные числа λ и μ .
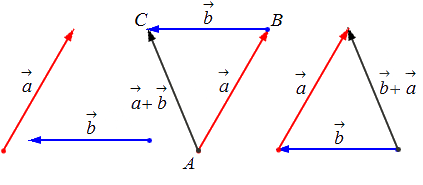
- Свойство коммутативности: a ⇀ + b → = b → + a → .
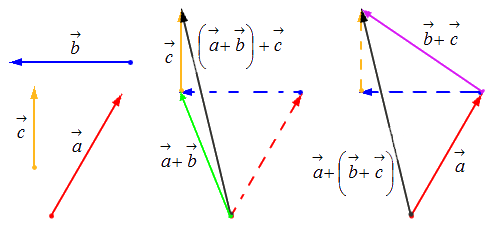
- Свойство ассоциативности: ( a → + b → ) + c → = a → + ( b → + c → ) .
- Свойство использования нейтрального элемента по сложению (нулевой вектор 0 → ⃗). Это очевидное свойство: a → + 0 → = a →
- Свойство использования нейтрального элемента по умножению (число, равное единице): 1 · a → = a → . Это очевидное свойство, не предполагающее никаких геометрических преобразований.
- Любой ненулевой вектор a → имеет противоположный вектор – a → и верным является равенство: a → + ( – a → ) = 0 → . Указанное свойство – очевидное.
- Сочетательное свойство операции умножения: ( λ · µ ) · a → = λ · ( µ · a → ) . Например, растяжение вектора при умножении на число 10 можно произвести, сначала растянув вектор в 2 раза, а затем полученный результат еще в 5 раз. Также возможен вариант умножения на число 10 при сжатии вектора в 5 раз и последующего растяжения полученного результата в 50 раз.
- Первое распределительное свойство (очевидно): ( λ + µ ) · a → = λ · a → + µ · a → .
- Второе распределительное свойство: λ · ( a → + b → ) = λ · a → + λ · b → .
Геометрически это свойство определяется подобием треугольников: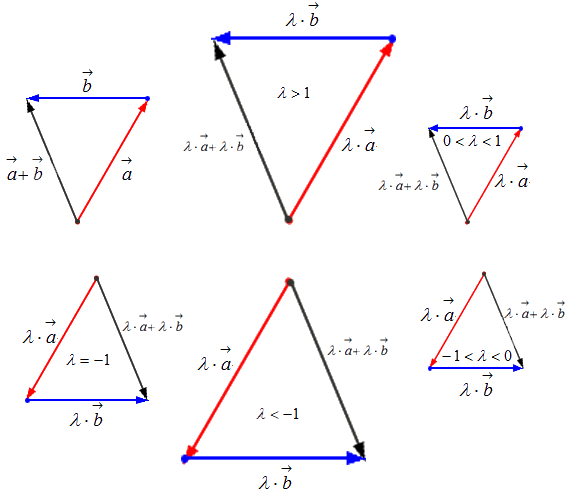
Свойства коммутативности и ассоциативности дают возможность складывать векторы в произвольном порядке.
Перечисленные свойства операций позволяют осуществлять необходимые преобразования векторно-числовых выражений аналогично привычным числовым. Рассмотрим это на примере.
Задача: упростить выражение a → – 2 · ( b → + 3 · a → )
Решение
– используя второе распределительное свойство, получим: a → – 2 · ( b → + 3 · a → ) = a → – 2 · b → – 2 · ( 3 · a → )
– задействуем сочетательное свойство умножения, выражение приобретет следующий вид: a → – 2 · b → – 2 · ( 3 · a → ) = a → – 2 · b → – ( 2 · 3 ) · a → = a → – 2 · b → – 6 · a →
– используя свойство коммутативности, меняем местами слагаемые: a → – 2 · b → – 6 · a → = a → – 6 · a → – 2 · b →
– затем по первому распределительному свойству получаем: a → – 6 · a → – 2 · b → = ( 1 – 6 ) · a → – 2 · b → = – 5 · a → – 2 · b → Краткая запись решения будет выглядеть так: a → – 2 · ( b → + 3 · a → ) = a → – 2 · b → – 2 · 3 · a → = 5 · a → – 2 · b →
Ответ: a → – 2 · ( b → + 3 · a → ) = – 5 · a → – 2 · b →
Сложение векторов. Векторная сумма. Правила сложения векторов. Геометрическая сумма. Он-лайн калькулятор.
Сложение векторов. Векторная сумма. Правила сложения векторов. Геометрическая сумма. Он-лайн калькулятор
В механике существуют два типа величин:
- скалярные величины, задающие некоторое числовое значение – время, температура, масса и т.д.
- векторные величины, которые вместе с некоторым числовым значением задают направление – скорость, сила и т.д..
Рассмотрим сначала алгебраический подход к сложению векторов.
Покоординатное сложение векторов.
Тогда координаты вектора, получившегося при сложении этих двух векторов вычисляются по формуле:
В двумерном случае все абсолютно анологично, просто отбрасываем третью координату.
Теперь перейдем к геометрическому смыслу сложения двух векторов:
При сложении векторов нужно учитывать и их числовые значения, и направления. Есть несколько широко используемых методов сложения:
- правило параллелограмма
- правило треугольника
- тригонометрический способ
Правило параллелограмма. Сложение векторов по правилу параллелограмма.
| |
Процедура сложения векторов по правилу параллелограмма заключается в следующем:
|
Правило треугольника. Сложение векторов по правилу треугольника.
|
Сложение векторов по правилу треугольника заключается в следующем:
|
Тригонометрический способ. Сложение векторов тригонометрическим способом.
|
Результирующий вектор сложения двух компланарных векторов может быть вычислен с помощью теоремы косинусов:
Угол между результирующим вектором и одним из исходных векторов может быть вычислен по теореме синусов:
|
Пример – сложение векторов.
Сила 1 равна 5кН и воздействует на тело в направлении, на 80 o отличающемся от направления действия второй силы, равной 8 кН.
Результирующая сила вычисляется следующим образом:
Fрез = [ (5 кН) 2 + (8 кН) 2 – 2 (5 кН)(8 kН) cos(180 o – (80 o )) ] 1/2
Угол между результирующей силой и первой силой равен:
А угол между второй и результирующей силой можно посчитать следующим образом: as
α = arcsin [ (5 кН) sin(180 o – (80 o )) / (10,2 кН) ]
Он-лайн калькулятор сложения векторов.
Калькулятор ниже может быть использован для любвых векторных величин ( силы, скорости и т.д.) Точка начала вектора совпадает с началами обоих исходных векторов.
Консультации и техническая
поддержка сайта: Zavarka Team
Сумма и разность векторов
В данной публикации мы рассмотрим, как найти сумму и разность векторов, приведем геометрическую интерпретацию, а также формулы, свойства и примеры этих действий.
Сумма векторов
Сложение векторов выполняется по правилу треугольника.

Геометрическая интерпретация:
Суммой a и b является вектор c , начало которого совпадает с началом a , а конец – с концом b . При этом конец вектора a должен совпадать с началом вектора b .
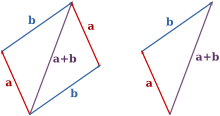
Для сложения векторов также используется правило параллелограмма.

Два неколлинеарных вектора a и b можно привести к общему началу, и в этом случае их суммой является вектор c , совпадающий с диагональю параллелограмма и берущий начало в той же точке, что и исходные векторы.
Формула сложения векторов
Элементы вектора c равняются попарной сумме соответствующих элементов a и b .
” data-lang=”default” data-override=”<“emptyTable”:””,”info”:””,”infoEmpty”:””,”infoFiltered”:””,”lengthMenu”:””,”search”:””,”zeroRecords”:””,”exportLabel”:””,”file”:”default”>” data-merged=”[]” data-responsive-mode=”2″ data-from-history=”0″>
| Для плоских задач | a + b = x + bx; ay + by> |
| Для трехмерных задач | a + b = x + bx; ay + by; az + bz> |
| Для n-мерных векторов | a + b = 1 + b1; a2 + b2; . an + bn> |
Свойства сложения векторов
1. Коммутативность: a + b = b + a
2. Ассоциативность: ( a + b ) + c = a + ( b + c )
3. Прибавление к нулю: a + 0 = a
4. Сумма противоположных векторов: a + (- a ) = 0
Примечание: Вектор – a коллинеарен и равен по длине a , но имеет противоположное направление, из-за чего называется противоположным.
Разность векторов
Для вычитания векторов также применяется правило треугольника.

Если из вектора a вычесть b , то получится c , причем должно соблюдаться условие:
Формула вычитания векторов
Элементы вектора c равны попарной разности соответствующих элементов a и b .
” data-lang=”default” data-override=”<“emptyTable”:””,”info”:””,”infoEmpty”:””,”infoFiltered”:””,”lengthMenu”:””,”search”:””,”zeroRecords”:””,”exportLabel”:””,”file”:”default”>” data-merged=”[]” data-responsive-mode=”2″ data-from-history=”0″>
| Для плоских задач | a – b = x – bx; ay – by> |
| Для трехмерных задач | a – b = x – bx; ay – by; az – bz> |
| Для n-мерных векторов | a – b = 1 – b1; a2 – b2; . an – bn> |
Примеры задач
Задание 1
Вычислим сумму векторов и .
Задание 2
Найдем разность векторов и .
[spoiler title=”источники:”]
http://dpva.ru/Guide/GuideMathematics/linearAlgebra/vectorsaddition/
[/spoiler]
В данной публикации мы рассмотрим, как найти сумму и разность векторов, приведем геометрическую интерпретацию, а также формулы, свойства и примеры этих действий.
-
Сумма векторов
- Формула сложения векторов
- Свойства сложения векторов
-
Разность векторов
- Формула вычитания векторов
- Примеры задач
Сумма векторов
Сложение векторов выполняется по правилу треугольника.
Геометрическая интерпретация:
Суммой a и b является вектор c, начало которого совпадает с началом a, а конец – с концом b. При этом конец вектора a должен совпадать с началом вектора b.
Для сложения векторов также используется правило параллелограмма.
Два неколлинеарных вектора a и b можно привести к общему началу, и в этом случае их суммой является вектор c, совпадающий с диагональю параллелограмма и берущий начало в той же точке, что и исходные векторы.
Формула сложения векторов
ci = ai + bi
Элементы вектора c равняются попарной сумме соответствующих элементов a и b.
| Для плоских задач | a + b = {ax + bx; ay + by} |
| Для трехмерных задач | a + b = {ax + bx; ay + by; az + bz} |
| Для n-мерных векторов | a + b = {a1 + b1; a2 + b2; … an + bn} |
Свойства сложения векторов
1. Коммутативность: a + b = b + a
2. Ассоциативность: (a + b) + c = a + (b + c)
3. Прибавление к нулю: a + 0 = a
4. Сумма противоположных векторов: a + (-a) = 0
Примечание: Вектор –a коллинеарен и равен по длине a, но имеет противоположное направление, из-за чего называется противоположным.
Разность векторов
Для вычитания векторов также применяется правило треугольника.
Если из вектора a вычесть b, то получится c, причем должно соблюдаться условие: b + c = a
Формула вычитания векторов
ci = ai – bi
Элементы вектора c равны попарной разности соответствующих элементов a и b.
| Для плоских задач | a – b = {ax – bx; ay – by} |
| Для трехмерных задач | a – b = {ax – bx; ay – by; az – bz} |
| Для n-мерных векторов | a – b = {a1 – b1; a2 – b2; … an – bn} |
Примеры задач
Задание 1
Вычислим сумму векторов a = {3; 5} и b = {2; 7}.
Решение:
a + b = {3 + 2; 5 + 7} = {5; 12}.
Задание 2
Найдем разность векторов a = {4; 8; -2} и b = {-1; 9; 5}.
Решение:
a – b = {4 – (-1); 8 – 9; -2 – 5} = {5; -1; -7}.
Эта статья — о понятии вектора в геометрии. Об общем понятии вектора в математике см. Вектор (математика).

Вектор
Вектор — направленный отрезок прямой, то есть отрезок, для которого указано, какая из его граничных точек является началом, а какая — концом[1].
Вектор с началом в точке 




Вектор в геометрии естественно сопоставляется переносу (параллельному переносу), что, очевидно, проясняет происхождение его названия (лат. vector, несущий). Итак, каждый направленный отрезок однозначно определяет собой какой-то параллельный перенос плоскости или пространства: скажем, вектор 
Интерпретация вектора как переноса позволяет естественным и интуитивно очевидным способом ввести операцию сложения векторов — как композиции (последовательного применения) двух (или нескольких) переносов; то же касается и операции умножения вектора на число.
Основные понятия[править | править код]
Вектором называется направленный отрезок построенный по двум точкам, одна из которых считается началом, а другая концом.
Координаты вектора определяются как разность координат точек его конца и начала. Например, на координатной плоскости, если даны координаты начала и конца: 


Длиной вектора 



Роль нуля среди векторов играет нулевой вектор, у которого начало и конец совпадают 

Проекция вектора на направленную прямую

Для координатного представления векторов большое значение имеет понятие проекции вектора на ось (направленную прямую, см. рисунок). Проекцией называется длина отрезка, образованного проекциями точек начала и конца вектора на заданную прямую, причём проекции приписывается знак плюс, если направление проекции соответствует направлению оси, иначе — знак минус. Проекция равна длине исходного вектора, умноженной на косинус угла между исходным вектором и осью; проекция вектора на перпендикулярную ему ось равна нулю.
Применения[править | править код]
Векторы находят широкое применение в геометрии и в прикладных науках, где используются для представления величин, имеющих направление (силы, скорости и т. п.). Применение векторов упрощает ряд операций — например, определение углов между прямыми или отрезками, вычисление площадей фигур. В компьютерной графике векторы-нормали используются, чтобы создать правильное освещение тела. Использование векторов может быть положено в основу метода координат.
Виды векторов[править | править код]
Иногда вместо того, чтобы рассматривать в качестве векторов множество всех направленных отрезков (рассматривая как различные все направленные отрезки, начала и концы которых не совпадают), берут только некоторую модификацию этого множества (фактормножество), то есть, некоторые направленные отрезки рассматривают как равные, если они имеют одинаковое направление и длину, хотя они могут иметь разное начало (и конец), то есть направленные отрезки одинаковой длины и направления считаются представляющими один и тот же вектор; таким образом, каждому вектору оказывается соответствующим целый класс направленных отрезков, одинаковых по длине и направлению, но различающихся началом (и концом).
Так, говорят о «свободных», «скользящих» и «фиксированных» векторах. Эти виды отличаются понятием равенства двух векторов.
- Говоря о свободных векторах, отождествляют любые векторы, имеющие одинаковое направление и длину;
- говоря о скользящих векторах — добавляют, что начала равных скользящих векторов должны совпадать или лежать на одной прямой, на которой лежат изображающие эти векторы направленные отрезки (так что один может быть совмещен с другим перемещением в направлении, им же самим задаваемом);
- говоря о фиксированных векторах — говорят, что равными считаются только векторы, у которых совпадают и направления, и начала (то есть в этом случае факторизации нет: нет двух фиксированных векторов с различными началами, которые считались бы равными).
Формально:
Говорят, что свободные векторы 




Говорят, что скользящие векторы
Скользящие векторы особо употребимы в механике. Простейший пример скользящего вектора в механике — сила, действующая на твердое тело. Перенос начала вектора силы вдоль прямой, на которой он лежит, не меняет момента силы относительно любой точки; перенос же его на другую прямую, даже если не менять величины и направления вектора, может вызвать изменение его момента (даже почти всегда вызовет): поэтому при вычислении момента нельзя рассматривать силу как свободный вектор, то есть, нельзя её считать приложенной к произвольной точке твердого тела.
Говорят, что фиксированные векторы 

Вектором в одном случае называется направленный отрезок, а в других случаях различные векторы — это разные классы эквивалентности направленных отрезков, определяемые неким конкретным отношением эквивалентности. Причем отношение эквивалентности может быть разным, определяя тип вектора («свободный», «фиксированный» итд). Проще говоря, внутри класса эквивалентности все входящие в него направленные отрезки рассматриваются как совершенно равные, и каждый может равно представлять весь класс.
Все операции над векторами (сложение, умножение на число, скалярное и векторное произведения, вычисление модуля или длины, угла между векторами и т. д.) в принципе определены одинаково для всех типов векторов, различие в типах сводится в этом отношении только к тому, что для скользящих и фиксированных наложено ограничение на возможность осуществления операций между двумя векторами, имеющими разное начало (так, для двух фиксированных векторов запрещено — или лишено смысла — сложение, если их начала отличаются; однако для всех случаев, когда эта операция разрешена — или имеет смысл — она такова же, как для свободных векторов). Поэтому часто тип вектора вообще явно не указывается, подразумевается, что он очевиден из контекста. Более того, один и тот же вектор в зависимости от контекста задачи может рассматриваться как фиксированный, скользящий или свободный, например, в механике векторы сил, приложенных к телу, могут суммироваться независимо от точки приложения при нахождении равнодействующей (и в статике, и в динамике при исследовании движения центра масс, изменения импульса и т. п.), но не могут складываться друг с другом без учета точек приложения при вычислении вращающего момента (также и в статике и в динамике).
Отношения между векторами[править | править код]
Два вектора называются коллинеарными, если они лежат на параллельных прямых, либо на одной прямой. Два вектора называются сонаправленными, если они коллинеарны и направлены в одну сторону, противоположно направленными, если коллинеарны и направлены в разные стороны. Есть и другое определение: два ненулевых вектора 


Три вектора называются компланарными, если они, будучи приведенными к общему началу, лежат в одной плоскости[3].
Координатное представление[править | править код]

Разложение вектора
При работе с векторами часто вводят некоторую декартову систему координат и в ней определяют координаты вектора, раскладывая его по базисным векторам. Разложение по базису геометрически можно представить при помощи проекций вектора на координатные оси. Если известны координаты начала и конца вектора, координаты самого вектора получаются вычитанием из координат конца вектора координат его начала.

За базис часто выбирают координатные орты, обозначаемые 


Любое геометрическое свойство можно записать в координатах, после чего исследование из геометрического становится алгебраическим и при этом часто упрощается. Обратное, вообще говоря, не совсем верно: обычно принято говорить[4], что «геометрическое истолкование» имеют лишь те соотношения, которые выполняются в любой декартовой системе координат (инвариантные).
Операции над векторами[править | править код]
Модуль вектора[править | править код]
Модулем вектора 


Сложение векторов[править | править код]
Два вектора 
В координатном представлении вектор суммы получается суммированием соответствующих координат слагаемых:

Для геометрического построения вектора суммы 
Правило треугольника[править | править код]
Правило треугольника наиболее естественно следует из понимания вектора как переноса. Ясно, что результат последовательного применения двух переносов 
Для сложения двух векторов
Это правило прямо и естественно обобщается для сложения любого количества векторов, переходя в правило ломаной:
Правило трёх точек[править | править код]
Если отрезок 

Правило многоугольника[править | править код]
Начало второго вектора совмещается с концом первого, начало третьего — с концом второго и так далее, сумма же 
Правило параллелограмма[править | править код]
Для сложения двух векторов
Правило параллелограмма особенно удобно, когда есть потребность изобразить вектор суммы сразу же приложенным к той же точке, к которой приложены оба слагаемых — то есть изобразить все три вектора имеющими общее начало.
Модуль суммы двух векторов можно вычислить, используя теорему косинусов:
, где
— косинус угла между векторами
Если векторы изображены в соответствии с правилом треугольника и берется угол по рисунку — между сторонами треугольника — что не совпадает с обычным определением угла между векторами, а значит и с углом в приведенной формуле, то последний член приобретает знак минус, что соответствует теореме косинусов в её прямой формулировке.
Для суммы произвольного количества векторов применима аналогичная формула, в которой членов с косинусом больше: по одному такому члену существует для каждой пары векторов из суммируемого набора. Например, для трех векторов формула выглядит так:

Вычитание векторов[править | править код]

Два вектора
Для получения разности в координатной форме надо вычесть соответствующие координаты векторов:

Для получения вектора разности 


Модуль разности векторов[править | править код]
Три вектора 

где 
Отличие от формулы модуля суммы в знаке перед косинусом, при этом надо хорошо следить, какой именно угол берется (вариант формулы модуля суммы с углом между сторонами треугольника при суммировании по правилу треугольника по виду не отличается от данной формулы для модуля разности, но надо иметь в виду, что тут берутся разные углы: в случае суммы берётся угол, когда вектор
Умножение вектора на число[править | править код]

Вектор
Умножение вектора 
Умножение вектора 

Умножение вектора на число в координатной форме производится умножением всех координат на это число:

Исходя из определения получается выражение для модуля вектора, умноженного на число:

Аналогично как и числами, операции сложение вектора с самим с собой можно записать через умножение на число:

А вычитание векторов можно переписать через сложение и умножение:

Исходя из того, что умножение на 

Скалярное произведение векторов[править | править код]
Для геометрических векторов скалярное произведение определяется через их геометрические характеристики и вводится следующим образом:

Здесь для вычисления косинуса берётся угол между векторами, который определяется как величина угла, образованного векторами, если приложить их к одной точке (совместить их начала).
Это выражение можно переписать через координаты (здесь формула для трехмерного пространства):

Скалярным квадратом вектора называется его скалярное произведение само на себя и может быть вычислено через модуль вектора:

Векторное произведение векторов[править | править код]
Векторным произведением двух векторов 
Смешанное произведение векторов[править | править код]
Смешанным произведением трёх векторов 

Модуль этой величины даёт объём параллелепипеда, построенного на векторах
См. также[править | править код]
- Линейное пространство
- Векторная величина
- Кортеж (математика)
Литература[править | править код]
- Выгодский М. Я. Справочник по элементарной математике. — М.: Наука, 1978.
- Переиздание: Изд. АСТ, 2003, ISBN 5-17-009554-6.
- Башмаков М. Что такое вектор? // Квант. — 1976. — № 4. — С. 2—5.
- Зайцев В. В., Рыжков В. В., Сканави М. И. Элементарная математика. Повторительный курс. — Издание третье, стереотипное. — М.: Наука, 1976. — 591 с.
Примечания[править | править код]
- ↑ Атанасян Л. С., Бутузов В. Ф., Кадомцев С. Б., Позняк Э. Г., Юдина И. И. Геометрия 7-9 классы. — Москва: Просвещение, 2010. — 384 с. — ISBN 978-5-09-023915-8.
- ↑ Элементарная математика, 1976, с. 249..
- ↑ 1 2 Выгодский М. Я. Справочник по высшей математике. — Москва: Астрель, 2006. — 991 с. — ISBN 5-271-03651-0.
- ↑ Это утверждение, очевидно, до некоторой степени условно, поскольку конкретная фиксированная система координат при желании может быть явно включена в число объектов, для которых соотношения устанавливаются, и тогда алгебраические утверждения для этой фиксированной частной системы координат могут быть переформулированы так, что будут инвариантными при записи в любой другой, произвольной, системе координат.
