
Оператор градиента преобразует холм (слева), если смотреть на него сверху, в поле векторов (справа). Видно, что векторы направлены «в горку» и чем они длиннее, тем круче наклон
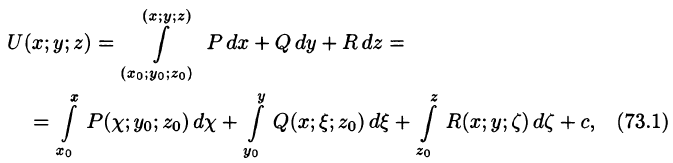
Градие́нт (от лат. gradiens — «шагающий, растущий») — вектор, своим направлением указывающий направление наискорейшего роста некоторой скалярной величины  (значение которой меняется от одной точки пространства к другой, образуя скалярное поле).
(значение которой меняется от одной точки пространства к другой, образуя скалярное поле).
Градиент поля обозначается:  . По величине (модулю) градиент равен скорости роста величины в направлении вектора[1][2]. Например, если взять в качестве высоту поверхности земли над уровнем моря, то её градиент в каждой точке поверхности будет показывать «направление самого крутого подъёма», а своей величиной характеризовать крутизну склона.
. По величине (модулю) градиент равен скорости роста величины в направлении вектора[1][2]. Например, если взять в качестве высоту поверхности земли над уровнем моря, то её градиент в каждой точке поверхности будет показывать «направление самого крутого подъёма», а своей величиной характеризовать крутизну склона.
Пространство, на котором определена функция и её градиент, может быть, вообще говоря, как обычным трёхмерным пространством, так и пространством любой другой размерности.
Термин впервые появился в метеорологии для исследования изменений температуры и давления атмосферы, а в математику был введён Максвеллом в 1873 году; обозначение  тоже предложил Максвелл. Наряду со стандартным обозначением
тоже предложил Максвелл. Наряду со стандартным обозначением  часто используется компактная запись с использованием оператора набла:
часто используется компактная запись с использованием оператора набла: 
Иллюстрация применения[править | править код]
![]()
Градиент 2D функции отображен на графике в виде синих стрелок
Пусть температура в комнате задана с помощью скалярного поля T таким образом, что в каждой точке, заданной координатами (x, y, z) температура равняется T(x, y, z) (предположим, что температура не изменяется с течением времени). В каждой точке комнаты градиент функции T будет показывать направление, в котором температура возрастает быстрее всего. Величина градиента определяет, насколько быстро температура возрастает в данном направлении.
Определение и вычисление[править | править код]
Для случая трёхмерного пространства градиентом дифференцируемой в некоторой области
скалярной функции  координат
координат  ,
,  ,
,  называется векторная функция с компонентами
называется векторная функция с компонентами
 [3]
[3]

Или, использовав для единичных векторов по осям прямоугольных декартовых координат  :
:

Если — функция  переменных
переменных  , то её градиентом называется -мерный вектор
, то её градиентом называется -мерный вектор

компоненты которого равны частным производным по всем её аргументам.
- Размерность вектора градиента определяется, таким образом, размерностью пространства (или многообразия), на котором задано скалярное поле, о градиенте которого идёт речь.
- Оператором градиента называется оператор, действие которого на скалярную функцию (поле) даёт её градиент. Этот оператор иногда коротко называют просто «градиентом».
Смысл градиента любой скалярной функции  в том, что его скалярное произведение с бесконечно малым вектором перемещения
в том, что его скалярное произведение с бесконечно малым вектором перемещения  даёт полный дифференциал этой функции при соответствующем изменении координат в пространстве, на котором определена , то есть линейную (в случае общего положения она же главная) часть изменения при смещении на . Применяя одну и ту же букву для обозначения функции от вектора и соответствующей функции от его координат, можно написать:
даёт полный дифференциал этой функции при соответствующем изменении координат в пространстве, на котором определена , то есть линейную (в случае общего положения она же главная) часть изменения при смещении на . Применяя одну и ту же букву для обозначения функции от вектора и соответствующей функции от его координат, можно написать:

Стоит здесь заметить, что поскольку формула полного дифференциала не зависит от вида координат  , то есть от природы параметров x вообще, то полученный дифференциал является инвариантом, то есть скаляром, при любых преобразованиях координат, а поскольку — это вектор, то градиент, вычисленный обычным образом, оказывается ковариантным вектором, то есть вектором, представленным в дуальном базисе, какой только и может дать скаляр при простом суммировании произведений координат обычного (контравариантного), то есть вектором, записанным в обычном базисе. Таким образом, выражение (вообще говоря — для произвольных криволинейных координат) может быть вполне правильно и инвариантно записано как:
, то есть от природы параметров x вообще, то полученный дифференциал является инвариантом, то есть скаляром, при любых преобразованиях координат, а поскольку — это вектор, то градиент, вычисленный обычным образом, оказывается ковариантным вектором, то есть вектором, представленным в дуальном базисе, какой только и может дать скаляр при простом суммировании произведений координат обычного (контравариантного), то есть вектором, записанным в обычном базисе. Таким образом, выражение (вообще говоря — для произвольных криволинейных координат) может быть вполне правильно и инвариантно записано как:

или, опуская по правилу Эйнштейна знак суммы,

(в ортонормированном базисе мы можем писать все индексы нижними, как мы и делали выше).
Однако градиент оказывается настоящим ковариантным вектором в любых криволинейных координатах.
Используя интегральную теорему
- ,

градиент можно выразить в интегральной форме:

здесь  — замкнутая поверхность охватывающая объём
— замкнутая поверхность охватывающая объём  — нормальный элемент этой поверхности.
— нормальный элемент этой поверхности.
Пример[править | править код]
Например, градиент функции  будет представлять собой:
будет представлять собой:

Некоторые применения[править | править код]
Геометрический смысл[править | править код]
Рассмотрим семейство линий уровня функции :

Нетрудно показать, что градиент функции в точке  перпендикулярен её линии уровня, проходящей через эту точку. Модуль градиента показывает максимальную скорость изменения функции в окрестности , то есть частоту линий уровня. Например, линии уровня высоты изображаются на топографических картах, при этом модуль градиента показывает крутизну спуска или подъёма в данной точке.
перпендикулярен её линии уровня, проходящей через эту точку. Модуль градиента показывает максимальную скорость изменения функции в окрестности , то есть частоту линий уровня. Например, линии уровня высоты изображаются на топографических картах, при этом модуль градиента показывает крутизну спуска или подъёма в данной точке.
В физике[править | править код]
В различных отраслях физики используется понятие градиента различных физических полей.
Например, напряжённость электростатического поля есть минус градиент электростатического потенциала, напряжённость гравитационного поля (ускорение свободного падения) в классической теории гравитации есть минус градиент гравитационного потенциала. Консервативная сила в классической механике есть минус градиент потенциальной энергии.
В других естественных науках[править | править код]
Понятие градиента находит применение не только в физике, но и в смежных и даже сравнительно далёких от физики науках (иногда это применение носит количественный, а иногда и просто качественный характер).
Например, градиент концентрации — нарастание или уменьшение по какому-либо направлению концентрации растворённого вещества, градиент температуры — увеличение или уменьшение по какому-то направлению температуры среды и т. д.
Градиент таких величин может быть вызван различными причинами, например, механическим препятствием, действием электромагнитных, гравитационных или других полей или различием в растворяющей способности граничащих фаз.
В экономике[править | править код]
В экономической теории понятие градиента используется для обоснования некоторых выводов и для оптимизации. В частности, используемые для нахождения оптимума потребителя метод множителей Лагранжа и условия Куна — Таккера (позаимствованные из естественных наук) основаны на сопоставлении градиентов функции полезности и функции бюджетного ограничения.
Связь с производной по направлению[править | править код]
Используя правило дифференцирования сложной функции, нетрудно показать, что
производная функции по направлению  равняется скалярному произведению градиента на единичный вектор
равняется скалярному произведению градиента на единичный вектор  :
:

Таким образом, для вычисления производной скалярной функции векторного аргумента по любому направлению достаточно знать
градиент функции, то есть вектор, компоненты которого являются её частными производными.
Градиент в ортогональных криволинейных координатах[править | править код]

где  — коэффициенты Ламе.
— коэффициенты Ламе.
Полярные координаты (на плоскости)[править | править код]
Коэффициенты Ламе:

Отсюда:

Цилиндрические координаты[править | править код]
Коэффициенты Ламе:

Отсюда:

Сферические координаты[править | править код]
Коэффициенты Ламе:

Отсюда:

Вариации и обобщения[править | править код]
Пусть  — отображение между метрическими пространствами. Борелева функция
— отображение между метрическими пространствами. Борелева функция  называется верхним градиентом
называется верхним градиентом  если следующее неравенство
если следующее неравенство

выполняется для произвольной спрямляемой кривой  , соединяющей
, соединяющей  и
и  в
в  .[4]
.[4]
См. также[править | править код]
- 4-градиент
- Векторный анализ
- Градиент концентрации
- Градиентные методы
- Оператор Кэнни
- Теорема Остроградского — Гаусса
- Формулы векторного анализа
Примечания[править | править код]
- ↑ Градиент // Советский энциклопедический словарь. — 2-е изд.. — М.: Советская энциклопедия, 1982. — С. 332. — 1600 с.
- ↑ Математическая энциклопедия, 1977.
- ↑ Коваленко Л. И. Методические указания по математическому анализу для студентов второго курса. Элементы векторного анализа.. — МФТИ, 2001. — С. 5. — 35 с. Архивная копия от 7 ноября 2020 на Wayback Machine
- ↑ 6.2 в Heinonen, Juha, et al. Sobolev spaces on metric measure spaces. Vol. 27. Cambridge University Press, 2015.
Литература[править | править код]
- Дубровин Б. А., Новиков С. П., Фоменко А. Т. Современная геометрия. Методы и приложения: уч. пособие для физико-математических специальностей университетов. — М.: Наука, 1986. — 759 с.
- Кочин Н. Е. Векторное исчисление и начала тензорного исчисления. — 9-е изд. — М. : Наука, 1965.
- Купцов Л. П. Градиент // Математическая энциклопедия (в 5 томах). — М.: Советская Энциклопедия, 1977. — Т. 1. — Стб. 1080. — 1152 с.
- Рашєвский П. К. Риманова геометрия и тензорный анализ. — 3-е изд. — М. : Наука, 1967.
Ссылки[править | править код]
- Что такое градиент на YouTube
- Weisstein, Eric W. Gradient (англ.) на сайте Wolfram MathWorld.
Теория поля — крупный раздел физики, механики, математики, в котором изучаются скалярные, векторные, тензорные поля.
К рассмотрению скалярных и векторных полей приводят многие задачи физики, электротехники, математики, механики и других технических дисциплин. Изучение одних физических полей способствует изучению и других. Так, например, силы всемирного тяготения, магнитные, электрические силы — все они изменяются обратно пропорционально квадрату расстояния от своего источника; диффузия в растворах происходит по законам, общим с распространением тепла в различных средах; вид силовых магнитных линий напоминает картину обтекания препятствий жидкостью и т. д.
Математическим ядром теории поля являются такие понятия, как градиент, поток, потенциал, дивергенция, ротор, циркуляция и другие. Эти понятия важны и в усвоении основных идей математического анализа функций многих переменных.
Полем называется область V пространства, в каждой точке которой определено значение некоторой величины. Если каждой точке М этой области соответствует определенное число U = U(M), говорят, что в области определено (задано) скалярное поле (или функция точки). Иначе говоря, скалярное поле — это скалярная функция U(М) вместе с ее областью определения. Если же каждой точке М области пространства соответствует некоторый вектор  , то говорят, что задано векторное поле (или векторная функция точки).
, то говорят, что задано векторное поле (или векторная функция точки).
Примерами скалярных полей могут быть поля температуры (воздуха, тела, …), атмосферного давления, плотности (массы, воздуха, …), электрического потенциала и т.д. Примерами векторных полей являются поле силы тяжести, поле скоростей частиц текущей жидкости (ветра), магнитное поле, поле плотности электрического тока и т. д.
Если функция  не зависит от времени, то скалярное (векторное) поле называется стационарным (или установившимся); поле, которое меняется с течением времени (меняется, например, скалярное поле температуры при охлаждении тела), называется нестационарным (или неустановившимся).
не зависит от времени, то скалярное (векторное) поле называется стационарным (или установившимся); поле, которое меняется с течением времени (меняется, например, скалярное поле температуры при охлаждении тела), называется нестационарным (или неустановившимся).
Далее будем рассматривать только стационарные поля.
Если V — область трехмерного пространства, то скалярное поле U можно рассматривать как функцию трех переменных х, у, z (координат точки М):

(Наряду с обозначениями  используют запись
используют запись  — радиус-вектор точки М.)
— радиус-вектор точки М.)
Если скалярная функция U (М) зависит только от двух переменных, например х и у, то соответствующее скалярное поле U(х; у) называют плоским.
Аналогично: вектор  , определяющий векторное поле, можно рассматривать как векторную функцию трех скалярных аргументов
, определяющий векторное поле, можно рассматривать как векторную функцию трех скалярных аргументов 
Вектор можно представить (разложив его по ортам координатных осей) в виде

где P(x;y;z), Q(x;y;z ), R(x;y;z) — проекции вектора  на оси координат. Если в выбранной системе координат Oxyz одна из проекций вектора равна нулю, а две другие зависят только от двух переменных, то векторное поле называется плоским. Например,
на оси координат. Если в выбранной системе координат Oxyz одна из проекций вектора равна нулю, а две другие зависят только от двух переменных, то векторное поле называется плоским. Например, 
Векторное поле называется однородным, если — постоянный вектор, т. е. Р, R и Q — постоянные величины. Таким полем является поле тяжести. Здесь Р = О, Q — О, R = — mg, g — ускорение силы тяжести, m — масса точки.
В дальнейшем будем предполагать, что скалярные функции (U(x;y;z) — определяющая скалярное поле, P(x;y;z), Q(x;y;z) и R(x; у; z) — задающие векторное поле) непрерывны вместе со своими частными производными.
Пример:
Функция  определяет скалярное поле в точках пространства, ограниченного сферой с центром в начале координат и радиусом R = 1; скалярное поле
определяет скалярное поле в точках пространства, ограниченного сферой с центром в начале координат и радиусом R = 1; скалярное поле определено во всем пространстве, за исключением точек оси Oz (на ней
определено во всем пространстве, за исключением точек оси Oz (на ней  ).
).
Пример:
Найти поле линейной скорости  материальной точки М, вращающейся против часовой стрелки с угловой скоростью
материальной точки М, вращающейся против часовой стрелки с угловой скоростью  вокруг оси Oz (см. п. 7.4).
вокруг оси Oz (см. п. 7.4).
Решение:
Угловую скорость представим в виде вектора , лежащего на оси Oz, направленного вверх. Имеем:

Построим радиус-вектор  точки М (см. рис. 267).
точки М (см. рис. 267).
Численное значение линейной скорости (модуль), как известно из курса физики, равно  , где р — расстояние вращающейся точки M(x;y,z) от оси вращения (оси Oz).Но
, где р — расстояние вращающейся точки M(x;y,z) от оси вращения (оси Oz).Но  — угол между вектором r и осью Oz). Следовательно,
— угол между вектором r и осью Oz). Следовательно, 
Вектор скорости направлен в сторону вращения, совпадает с направлением векторного произведения  векторы
векторы  образуют правую тройку). Следовательно,
образуют правую тройку). Следовательно,  т. е.
т. е.
или 
Поле линейных скоростей тела, вращающегося вокруг неподвижной оси, есть плоское векторное поле.

Скалярное поле
Поверхности и линии уровня:
Рассмотрим скалярное поле, задаваемое функцией U = U(x,y,z). Для наглядного представления скалярного поля используют поверхности и линии уровня.
Поверхностью уровня скалярного поля называется геометрическое место точек, в которых функция U(М) принимает постоянное значение, т. е.

Давая в уравнении (70.1) величине с различные значения, получим различные поверхности уровня, которые в совокупности как бы расслаивают поле. Через каждую точку поля проходит только одна поверхность уровня. Ее уравнение можно найти путем подстановки координат точки в уравнение (70.1).
Для скалярного поля, образованного функцией
поверхностями уровня является множество концентрических сфер с центрами в начале координат:  В частности, при с = 1 получим
В частности, при с = 1 получим  , т. е. сфера стягивается в точку.
, т. е. сфера стягивается в точку.
Для равномерно раскаленной нити поверхности уровня температурного поля (изотермические поверхности) представляют собой круговые цилиндры, общей осью которых служит нить.
В случае плоского поля U — U(х; у) равенство U(x; у) = с представляет собой уравнение линии уровня поля, т. е. линия уровня —это линия на плоскости Оху, в точках которой функция U (х; у) сохраняет постоянное значение.
В метеорологии, например, сети изобар и изотерм (линии одинаковых средних давлений и одинаковых средних температур) являются линиями уровня и представляют собой функции координат точек местности.
Линии уровня применяются в математике при исследовании поверхностей методом сечений (см. п. 12.9).
Производная по направлению
Для характеристики скорости изменения поля U =U(М) в заданном направлении введем понятие «производной по направлению».
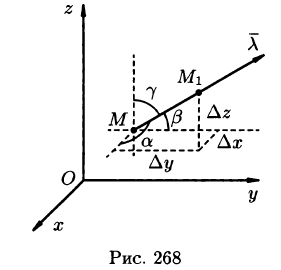
Возьмем в пространстве, где задано поле U = U(x;y;z), некоторую точку М и найдем скорость изменения функции U при движении точки М в произвольном направлении  . Пусть вектор имеет начало в точке М и направляющие косинусы
. Пусть вектор имеет начало в точке М и направляющие косинусы 
Приращение функции U, возникающее при переходе от точки М к некоторой точке  в направлении вектора определяется как
в направлении вектора определяется как

или

(см. рис. 268).
Тогда

Производной от функции U = U(M) в точке М по направлению называется предел

Производная по направлению и характеризует скорость изменения функции (поля) в точке М по этому направлению. Если  > 0, то функция U возрастает в направлении , если < 0, то функция U в направлении убывает. Кроме того, величина
> 0, то функция U возрастает в направлении , если < 0, то функция U в направлении убывает. Кроме того, величина  представляет
представляет
собой мгновенную скорость изменения функции U в направлении в точке М: чем больше , тем быстрее изменяется функция U. В этом состоит физический смысл производной по направлению.
Выведем формулу для вычисления производной по направлению, считая, что функция U(x;y;z) дифференцируема в точке М. Тогда ее полное приращение в этой точке М можно записать так:

где  — бесконечно малые функции при
— бесконечно малые функции при  (см. п. 44.3). Поскольку
(см. п. 44.3). Поскольку

то

Переходя к пределу при получим формулу для вычисления производной по направлению:

В случае плоского поля U = U(x;y) имеем:

Формула (70.2) принимает вид:
Замечание:
Понятие производной по направлению является обобщением понятия частных производных  Их можно рассматривать как производные от функции и по направлению координатных осей Ох, Оу и Oz. Так, если направление совпадает с положительным направлением оси Ох, то, положив в формуле (70.2)
Их можно рассматривать как производные от функции и по направлению координатных осей Ох, Оу и Oz. Так, если направление совпадает с положительным направлением оси Ох, то, положив в формуле (70.2)  получим
получим
Пример:
Найти производную функции  в точке М(0; 1; 2) в направлении от этой точки к точке
в точке М(0; 1; 2) в направлении от этой точки к точке 
Решение:
Находим вектор  и его направляющие косинусы:
и его направляющие косинусы:

Находим частные производные функции и вычисляем их значения в точке М:
Следовательно, по формуле (70.2) имеем:

Поскольку jj^- < 0, то за данная функция в данном направлении убывает.
данная функция в данном направлении убывает.
Градиент скалярного поля и его свойства
В каком направлении производная имеет наибольшее значение? Это направление указывает вектор, называемый градиентом скалярного поля.
Можно заметить, что правая часть равенства (70.2) представляет собой скалярное произведение единичного вектора

и некоторого вектора
Вектор, координатами которого являются значения частных производных функции U(x,y,z) в точке M(x;y,z), называют градиентом функции и обозначают gradU, т. е. 
или
Отметим, что grad U есть векторная величина. Говорят: скалярное поле U порождает векторное поле градиента U. Теперь равенство (70.2) можно записать в виде
или

где  угол между вектором grad U и направлением (см. рис. 269).
угол между вектором grad U и направлением (см. рис. 269).
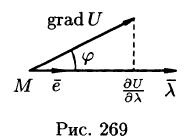
Из формулы (70.3) сразу следует, что производная по направлению достигает наибольшего значения, когда  Таким образом, направление градиента совпадает с направлением А, вдоль которого функция (поле) меняется быстрее всего, т. е. градиент функции указывает направление наибыстрейшего возрастания функции. Наибольшая скорость изменения функции U в точке М равна
Таким образом, направление градиента совпадает с направлением А, вдоль которого функция (поле) меняется быстрее всего, т. е. градиент функции указывает направление наибыстрейшего возрастания функции. Наибольшая скорость изменения функции U в точке М равна

В этом состоит физический смысл градиента. На указанном свойстве градиента основано его широкое применение в математике и других дисциплинах.
Приведем важные свойства градиента функции.
1.Градиент направлен по нормали к поверхности уровня, проходящей через данную точку.
Действительно, по любому направлению вдоль поверхности уровня  Но тогда из (70.3) следует, что
Но тогда из (70.3) следует, что 
Доказываются эти свойства на основании определения градиента. Докажем, например, последнее свойство. Имеем:

Замечание. Приведенные свойства градиента функции остаются справедливыми и для плоского поля.
Пример:
Найти наибольшую скорость возрастания функции

Решение:
Имеем:

Наибольшая скорость возрастания функции равна

Отметим, что функция U будет убывать с наибольшей скоростью  , если точка А движется в направлении
, если точка А движется в направлении  (антиградиентное направление).
(антиградиентное направление).
Векторное поле
Векторные линии поля:
Рассмотрим векторное поле, задаваемое вектором  . Изучение поля удобно начинать с понятия векторных линий; они являются простейшими геометрическими характеристиками поля.
. Изучение поля удобно начинать с понятия векторных линий; они являются простейшими геометрическими характеристиками поля.
Векторной линией поля  называется линия, касательная к которой в каждой ее точке М имеет направление соответствующего ей вектора
называется линия, касательная к которой в каждой ее точке М имеет направление соответствующего ей вектора  .
.
Это понятие для конкретных полей имеет ясный физический смысл. Например, в поле скоростей текущей жидкости векторными линиями будут линии, по которым движутся частицы жидкости (линии тока); для магнитного поля векторными (силовыми) линиями будут линии, выходящие из северного полюса и оканчивающиеся в южном.
Совокупность всех векторных линий поля, проходящих через некоторую замкнутую кривую, называется векторной трубкой.
Изучение векторного поля обычно начинают с изучения расположения его векторных линий. Векторные линии поля

описываются системой дифференциальных уравнений вида
Действительно, пусть PQ — векторная линия поля,  — ее радиус-вектор. Тогда вектор
— ее радиус-вектор. Тогда вектор  направлен по касательной к линии PQ в точке М (см. рис. 270). В силу коллинеарности векторов
направлен по касательной к линии PQ в точке М (см. рис. 270). В силу коллинеарности векторов  следует пропорциональность их проекций, т. е. равенства (71.2).
следует пропорциональность их проекций, т. е. равенства (71.2).
Пример:
Найти векторные линии поля линейных скоростей тела, вращающегося с постоянной угловой скоростью вокруг оси Oz.
Решение:
Это поле определено вектором  (см. пример 69.2). Согласно (71.2), имеем:
(см. пример 69.2). Согласно (71.2), имеем:

Интегрируя, получим:  т. е. векторные линии данного поля представляют собой окружности с центрами на оси Oz, лежащие в плоскостях, перпендикулярных к этой оси.
т. е. векторные линии данного поля представляют собой окружности с центрами на оси Oz, лежащие в плоскостях, перпендикулярных к этой оси.
Поток поля
Пусть векторное поле образовано вектором (71.1). Для наглядности будем считать  вектором скорости некоторого потока жидкости, движущейся стационарно. Представим, что некоторая поверхность S находится в этом потоке и пропускает жидкость. Подсчитаем, какое количество жидкости протекает через поверхность S.
вектором скорости некоторого потока жидкости, движущейся стационарно. Представим, что некоторая поверхность S находится в этом потоке и пропускает жидкость. Подсчитаем, какое количество жидкости протекает через поверхность S.
Выберем определенную сторону поверхности S. Пусть  — единичный вектор нормали к рассматриваемой стороне поверхности S. Разобьем поверхность на элементарные площадки
— единичный вектор нормали к рассматриваемой стороне поверхности S. Разобьем поверхность на элементарные площадки  Выберем в каждой площадке точку
Выберем в каждой площадке точку  (см. рис. 271) и вычислим значения вектора скорости в каждой точке: .
(см. рис. 271) и вычислим значения вектора скорости в каждой точке: . .
.
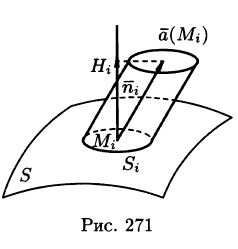
Будем приближенно считать каждую площадку плоской, а вектор  постоянным по модулю и одинаково направленным в каждой точке площадки. Тогда за единицу времени через
постоянным по модулю и одинаково направленным в каждой точке площадки. Тогда за единицу времени через  протекает количество жидкости, приближенно равное
протекает количество жидкости, приближенно равное  — площадь i-й площадки,
— площадь i-й площадки, — высота i-гo цилиндра с образующей
— высота i-гo цилиндра с образующей  . Но Я, является проекцией вектора на нормаль
. Но Я, является проекцией вектора на нормаль  — единичный вектор нормали к поверхности в точке
— единичный вектор нормали к поверхности в точке  . Следовательно, общее количество жидкости, протекающее через всю поверхность S за единицу времени, найдем, вычислив сумму
. Следовательно, общее количество жидкости, протекающее через всю поверхность S за единицу времени, найдем, вычислив сумму
Точное значение искомого количества жидкости получим, взяв предел найденной суммы при неограниченном увеличении числа элементарных площадок и стремлении к нулю их размеров (диаметров  площадок):
площадок):

Независимо от физического смысла поля полученный интеграл называют потоком векторного поля.
Потоком вектора через поверхность S называется интеграл по поверхности от скалярного произведения вектора поля на единичный вектор нормали к поверхности, т. е.

Рассмотрим различные формы записи потока вектора. Так как

(см. (6.2)), то

где  — проекция вектора а на направление нормали
— проекция вектора а на направление нормали  — дифференциал (элемент) площади поверхности.
— дифференциал (элемент) площади поверхности.
Иногда формулу (71.3) записывают в виде
где вектор направлен по нормали к поверхности, причем
направлен по нормали к поверхности, причем 
Так как

— проекции вектора на соответствующие координатные оси, то поток (71.3) вектора , можно записать в виде

Используя взаимосвязь поверхностных интегралов I и II рода (см. формулу (58.8)), поток вектора можно записать как

Отметим, что поток К вектора а есть скалярная величина. Величина К равна объему жидкости, которая протекает через поверхность S за единицу времени. В этом состоит физический смысл потока (независимо от физического смысла поля).
Особый интерес представляет случай, когда поверхность замкнута и ограничивает некоторый объем V. Тогда поток вектора записывается в виде

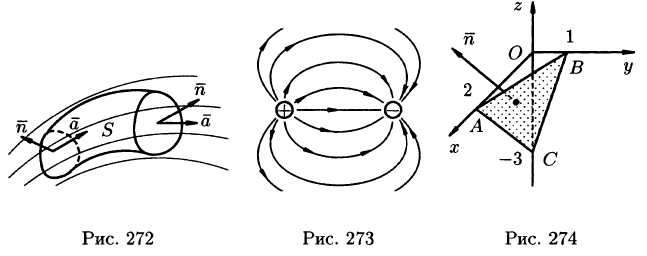
В этом случае за направление вектора п обычно берут направление внешней нормали и говорят о потоке изнутри поверхности S (см. рис. 272).
Если векторное поле  есть поле скоростей текущей жидкости, то величина потока К через замкнутую поверхность дает разность между количеством жидкости, вытекающей из области V (объема V) и втекающей в нее за единицу времени (в точках поверхности S, где векторные линии выходят из объема V, внешняя нормаль образует с вектором острый угол и
есть поле скоростей текущей жидкости, то величина потока К через замкнутую поверхность дает разность между количеством жидкости, вытекающей из области V (объема V) и втекающей в нее за единицу времени (в точках поверхности S, где векторные линии выходят из объема V, внешняя нормаль образует с вектором острый угол и  в точках, где векторные линии входят в объем,
в точках, где векторные линии входят в объем,  ).
).
При этом если К > 0, то из области V вытекает больше жидкости, чем в нее втекает. Это означает, что внутри области имеются дополнительные источники.
Если К < 0, то внутри области V имеются стоки, поглощающие избыток жидкости.
Можно сказать, что источники — точки, откуда векторные линии начинаются, а стоки — точки, где векторные линии кончаются. Так, в электростатическом поле источником является положительный заряд, стоком — отрицательный заряд магнита (см. рис. 273).
Если К = 0, то из области V вытекает столько же жидкости, сколько в нее втекает в единицу времени; внутри области либо нет ни источников, ни стоков, либо они таковы, что их действие взаимно компенсируется.
Пример:
Найти поток вектора  через верхнюю сторону треугольника, полученного при пересечении плоскости Зх + 6у — 2z — 6 =0 с координатными плоскостями (см. рис. 274).
через верхнюю сторону треугольника, полученного при пересечении плоскости Зх + 6у — 2z — 6 =0 с координатными плоскостями (см. рис. 274).
Решение:
Поток найдем методом проектирования на три координатные плоскости. Для этого воспользуемся формулой (71.5). В нашем случае Р = z, Q = —х, R = у. Имеем:

Расчленим этот поверхностный интеграл на три слагаемых, затем сведем их вычисление к вычислению двойных интегралов. Нормаль к верхней стороне треугольника образует с осью Ох тупой угол, с осью Оу — тупой, а с осью Oz — острый угол. (Единичный вектор данной плоскости есть  на верхней стороне
на верхней стороне 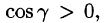 поэтому надо выбрать знак «минус»; получим:
поэтому надо выбрать знак «минус»; получим:

Итак,  Находим
Находим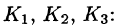
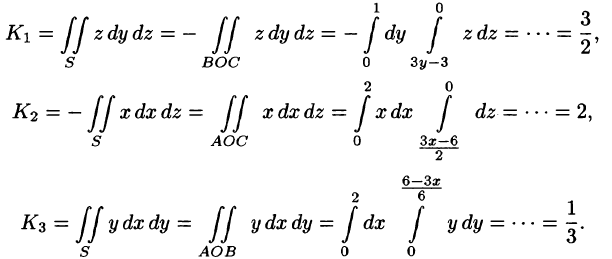
В результате имеем: 
Пример:
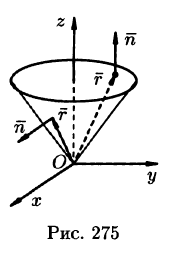
Найти поток радиус-вектора  через внешнюю сторону поверхности прямого конуса, вершина которого совпадает с точкой O(0; 0;0), если известны радиус основания R и высота конуса H (см. рис. 275).
через внешнюю сторону поверхности прямого конуса, вершина которого совпадает с точкой O(0; 0;0), если известны радиус основания R и высота конуса H (см. рис. 275).
Решение:

Очевидно, что

т. к. 
Дивергенция поля. Формула Остроградского-Гаусса
Важной характеристикой векторного поля (71.1) является так называемая дивергенция, характеризующая распределение и интенсивность источников и стоков поля.
Дивергенцией (или расходимостью) векторного поля

в точке М называется скаляр вида  и обозначается символом
и обозначается символом  , т. е.
, т. е.

Отметим некоторые свойства дивергенции.
- Если — постоянный вектор, то
- где с = const.
- т. е. дивергенция суммы двух векторных функций равна сумме дивергенции слагаемых.
- Если U — скалярная функция, — вектор, то

 где с = const.
где с = const. т. е. дивергенция суммы двух векторных функций равна сумме дивергенции слагаемых.
т. е. дивергенция суммы двух векторных функций равна сумме дивергенции слагаемых.
Эти свойства легко проверить, используя формулу (71.6). Докажем, например, справедливость свойства 4.
Так как  то
то
Используя понятия потока и дивергенции векторного поля, запишем известную в анализе (см. (58.9)) формулу Остроградского-Гаусса

в так называемой векторной форме.
Рассматривал область V, ограниченную замкнутой поверхностью S, в векторном поле (71.1), можно утверждать, что левая часть формулы (71.7) есть поток вектора через поверхность S; подынтегральная функция правой части формулы есть дивергенция вектора . Следовательно, формулу (71.7) можно записать в виде

(в котором она чаще всего и встречается).
Формула Остроградского-Гаусса означает, что поток векторного поля через замкнутую поверхность S (в направлении внешней нормали, т. е. изнутри) равен тройному интегралу от дивергенции этого поля по объему V, ограниченному данной поверхностью.
Используя формулу (71.8), можно дать другое определение дивергенции векторного поля в точке М (не связанное с выбором координатных осей).
По теореме о среднем для тройного интеграла (см. п. 54.1) имеем:
где  — некоторая (средняя) точка области V. Тогда формулу (71.8) можно переписать в виде
— некоторая (средняя) точка области V. Тогда формулу (71.8) можно переписать в виде  Отсюда
Отсюда
Пусть поверхность S стягивается в точку. Тогда  , и мы получаем выражение для
, и мы получаем выражение для  в точке М:
в точке М:

Дивергенцией векторного поля в точке М называется предел отношения потока поля через (замкнутую) поверхность S, окружающую точку М, к объему тела, ограниченного этой поверхностью, при условии, что вся поверхность стягивается в точку 
Определение (71.9) дивергенции эквивалентно (можно показать) определению (71.6).
Как видно из определения, дивергенция векторного поля в точке является скалярной величиной. Она образует скалярное поле в данном векторном поле.
Исходя из физического смысла потока (обычно условно считают, что есть поле скоростей фиктивного стационарного потока несжимаемой жидкости), можно сказать, что: при  точка М представляет собой источник, откуда жидкость вытекает, при
точка М представляет собой источник, откуда жидкость вытекает, при точка М есть сток, поглощающий жидкость. Как следует из равенства (71.9), величина характеризует мощность (интенсивность, плотность) источника или стока в точке М. В этом состоит физический смысл дивергенции.
точка М есть сток, поглощающий жидкость. Как следует из равенства (71.9), величина характеризует мощность (интенсивность, плотность) источника или стока в точке М. В этом состоит физический смысл дивергенции.
Понятно, что если в объеме V, ограниченном замкнутой поверхностью S, нет ни источников, ни стоков, то 
Векторное поле, в каждой точке которого дивергенция поля равна нулю, т. е.  называется соленоидалъным (или трубчатым).
называется соленоидалъным (или трубчатым).
Пример:
Найти дивергенцию поля линейных скоростей  жидкости, вращающейся как твердое тело вокруг неподвижной оси с постоянной угловой скоростью .
жидкости, вращающейся как твердое тело вокруг неподвижной оси с постоянной угловой скоростью .
Решение:
Примем ось вращения жидкости за ось Oz. Тогда, как показано ранее (см. пример 69.2),  Имеем:
Имеем:

Поле — соленоидальное.
Циркуляция поля
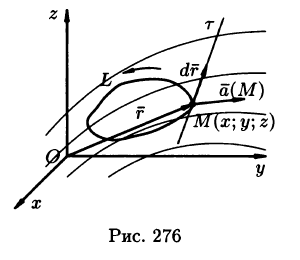
Пусть векторное поле образовано вектором (71.1). Возьмем в этом поле некоторую замкнутую кривую L и выберем на ней определенное направление.
Пусть  — радиус-вектор точки М на контуре L. Известно, что вектор
— радиус-вектор точки М на контуре L. Известно, что вектор  направлен по касательной к кривой в направлении ее обхода (см. рис. 276) и
направлен по касательной к кривой в направлении ее обхода (см. рис. 276) и  — дифференциал дуги кривой
— дифференциал дуги кривой 
Криволинейный интеграл по замкнутому контуру L от скалярного произведения вектора на вектор  , касательный к контуру L, называется циркуляцией вектора а вдоль L, т. е.
, касательный к контуру L, называется циркуляцией вектора а вдоль L, т. е.

Рассмотрим различные формы записи циркуляции. Так как

где  — проекция вектора на касательную
— проекция вектора на касательную  , проведенную в направлении обхода кривой L, то равенство (71.10) можно записать в виде
, проведенную в направлении обхода кривой L, то равенство (71.10) можно записать в виде

или

Циркуляция С, записанная в виде (71.12) имеет простой физический смысл: если кривая L расположена в силовом поле, то циркуляция — это работа силы поля при перемещении материальной точки вдоль L (п.56.5).
Отметим, что вдоль замкнутых векторных линий циркуляция отлична от нуля, потому что в каждой точке векторной линии скалярное произведение  сохраняет знак: положительный, если направление вектора совпадает с направлением обхода векторной линии; отрицательный — в противном случае.
сохраняет знак: положительный, если направление вектора совпадает с направлением обхода векторной линии; отрицательный — в противном случае.
Пример:
Найти циркуляцию вектора поля линейных скоростей вращающегося тела (см. пример 69.2)  вдоль замкнутой кривой L, лежащей в плоскости
вдоль замкнутой кривой L, лежащей в плоскости  , перпендикулярной оси вращения.
, перпендикулярной оси вращения.
Решение:
Будем считать, что направление нормали к плоскости совпадает с направлением оси Oz. Согласно формуле (71.12), имеем:

где S — площадь поверхности, ограниченной кривой L (см. 56.17).
Заметим, что если нормаль к поверхности S образует угол  с осью Oz, то циркуляция будет равна
с осью Oz, то циркуляция будет равна  с изменением угла величина С изменяется.
с изменением угла величина С изменяется.
Пример:
Вычислить циркуляцию векторного поля

вдоль периметра треугольника с вершинами A(1;0;0), В(0;1;0), С(0;0;1) (см. рис. 277).
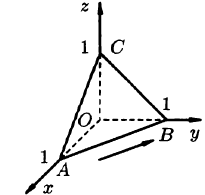
Решение:
Согласно формуле (71.12), имеем:

На отрезке AB: x + у = 1, z = 0, следовательно,

На отрезке ВС: у + z = 1, х = 0, следовательно,

На отрезке СА: х + z = 1, у = 0, следовательно,

Следовательно,

Ротор поля. Формула Стокса
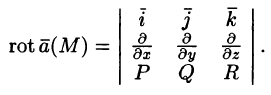
Ротором (или вихрем) векторного поля

называется вектор, обозначаемый  и определяемый формулой
и определяемый формулой

Формулу (71.13) можно записать с помощью символического определителя в виде, удобном для запоминания:
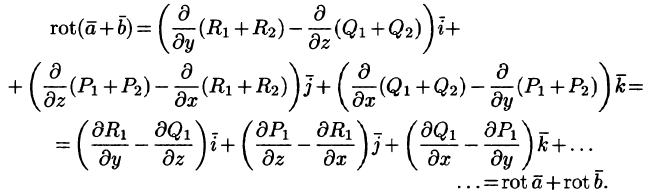
Отметим некоторые свойства ротора.
- Если — постоянный вектор, то
- т. е. ротор суммы двух векторов равен сумме роторов слагаемых.
- Если U — скалярная функция, а — векторная, то

 т. е. ротор суммы двух векторов равен сумме роторов слагаемых.
т. е. ротор суммы двух векторов равен сумме роторов слагаемых.
Эти свойства легко проверить, используя формулу (71.13). Покажем, например, справедливость свойства 3:
Используя понятия ротора и циркуляции, векторного поля, запишем известную в математическом анализе (см. п. 58.4) формулу Стокса:

Левая часть формулы (71.14) представляет собой циркуляцию вектора по контуру L, т. е.  (см. (71.11)). Интеграл в правой части формулы (71.14) представляет собой поток вектора
(см. (71.11)). Интеграл в правой части формулы (71.14) представляет собой поток вектора  через поверхность S, ограниченную контуром L (см. (71.3)), т. е.
через поверхность S, ограниченную контуром L (см. (71.3)), т. е.
Следовательно, формулу Стокса можно записать в виде

Такое представление формулы Стокса называют ее векторной формой. В этой формуле положительное направление на контуре L и выбор стороны у поверхности S согласованы между собой так же, как в теореме Стокса.
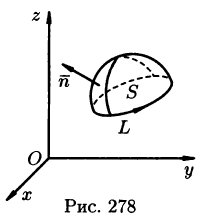
Формула (71.15) показывает, что циркуляция вектора вдоль замкнутого контура L равна потоку ротора этого вектора через поверхность S, лежащую в поле вектора а и ограниченную контуром L (натянутую на контур) (см. рис. 278).
Используя формулу (71.14), можно дать другое определение ротора поля, эквивалентное первому и не зависящее от выбора координатной системы.
Для этого применим формулу Стокса (71.15) для достаточно малой плоской площадки S с контуром L, содержащей точку М.
По теореме о среднем для поверхностного интеграла (п. 57.1, свойство 7) имеем:
где  — некоторая (средняя) точка площадки S (см. рис. 279).
— некоторая (средняя) точка площадки S (см. рис. 279).
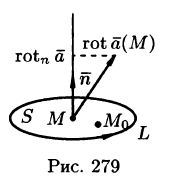
Тогда формулу (71.15) можно записать в виде
Отсюда:
Пусть контур L стягивается в точку М. Тогда  Перейдя к пределу, получаем:
Перейдя к пределу, получаем:
Ротором вектора в точке М называется вектор, проекция которого на каждое направление равна пределу отношения циркуляции вектора а по контуру L плоской площадки S, перпендикулярной этому направлению, к площади этой площадки.
Как видно из определения, ротор вектора есть векторная величина, образующая собственное векторное поле.
Дадим физическое истолкование понятия ротора векторного поля. Найдем ротор поля линейных скоростей твердого тела, вращающегося вокруг оси Oz с постоянной угловой скоростью (пример 69.2)  , т. е. ротор вектора
, т. е. ротор вектора 
По определению ротора
Ротор этого поля направлен параллельно оси вращения, его модуль равен удвоенной угловой скорости вращения.
С точностью до числового множителя ротор поля скоростей представляет собой угловую скорость вращения твердого тела. С этим связано само название «ротор» (лат. «вращатель»).
Замечание:
Из определения (71.13) ротора вытекает, что направление ротора — это направление, вокруг которого циркуляция имеет наибольшее значение (плотность) по сравнению с циркуляцией вокруг любого направления, не совпадающего с нормалью к площадке S.
Так что связь между ротором и циркуляцией аналогична связи между градиентом и производной по направлению (см. п. 70.3).
Оператор Гамильтона
Векторные дифференциальные операции первого порядка:
Основными дифференциальными операциями (действиями) над скалярным полем U и векторным полем являются gradU,  Действия взятия градиента, дивергенции и ротора называются векторными операциями первого порядка (в них участвуют только первые производные).
Действия взятия градиента, дивергенции и ротора называются векторными операциями первого порядка (в них участвуют только первые производные).
Эти операции удобно записывать с помощью так называемого оператора Гамильтона
Этот символический вектор называют также оператором  (читается «набла»); он приобретает определенный смысл лишь в комбинации со скалярными или векторными функциями. Символическое «умножение» вектора на скаляр U или вектор производится по обычным правилам векторной алгебры, а «умножение» символов
(читается «набла»); он приобретает определенный смысл лишь в комбинации со скалярными или векторными функциями. Символическое «умножение» вектора на скаляр U или вектор производится по обычным правилам векторной алгебры, а «умножение» символов  на величины
на величины 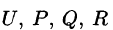 понимают как взятие соответствующей частной производной от этих величин.
понимают как взятие соответствующей частной производной от этих величин.
Применяя оператор Гамильтона, получим дифференциальные операции первого порядка:
Оператор Гамильтона применяется для записи и других операций и для вывода различных формул в теории поля. При действиях с ним надо пользоваться правилами векторной алгебры и правилами дифференцирования.
В частности, производная по направлению (70.2) может быть записана в виде
где 
Векторные дифференциальные операции второго порядка
После применения оператора Гамильтона к скалярному или векторному полю получается новое поле, к которому можно снова применить этот оператор. В результате получаются дифференциальные операции второго порядка. Нетрудно убедиться, что имеется лишь пять дифференциальных операций второго порядка:

(Понятно, что операция  например, не имеет смысла:
например, не имеет смысла:  — скаляр, говорить о дивергенции скаляра, т. е. о бессмысленно.)
— скаляр, говорить о дивергенции скаляра, т. е. о бессмысленно.)
Запишем явные выражения для дифференциальных операций второго порядка, используя оператор Гамильтона. Заметим при этом, что оператор действует только на множитель, расположенный непосредственно за оператором.

Правая часть этого равенства называется оператором Лапласа скалярной функции U и обозначается  . Таким образом,
. Таким образом,

Дифференциальное уравнение Лапласа  играет важную роль в различных разделах математической физики. Решениями уравнения Лапласа являются так называемые гармонические функции.
играет важную роль в различных разделах математической физики. Решениями уравнения Лапласа являются так называемые гармонические функции.
Замечание. К равенству (72.1) можно прийти, введя в рассмотрение скалярный оператор дельта:
(который тоже называют оператором Лапласа).
2.  так как векторное произведение двух одинаковых векторов равно нулю (нуль-вектор). Это означает, что поле градиента есть поле безвихревое.
так как векторное произведение двух одинаковых векторов равно нулю (нуль-вектор). Это означает, что поле градиента есть поле безвихревое.
4.  так как смешанное произведение трех векторов, из которых два одинаковые, равно нулю. Это означает, что поле вихря — соленоидальное.
так как смешанное произведение трех векторов, из которых два одинаковые, равно нулю. Это означает, что поле вихря — соленоидальное.

так как двойное векторное произведение обладает свойством

Здесь  — векторная величина, полученная в результате применения оператора Лапласа к вектору .
— векторная величина, полученная в результате применения оператора Лапласа к вектору .
Некоторые свойства основных классов векторных полей
Соленоидальное поле
Напомним, что векторное поле называется соленоидальным, если во всех точках его дивергенция поля равна нулю, т. е.
Примерами соленоидальных полей являются: поле линейных скоростей вращающегося твердого тела (см. пример 71.4); магнитное поле, создаваемое прямолинейным проводником, вдоль которого течет электрический ток, и другие.
Приведем некоторые свойства соленоидального поля.
- В соленоидальном поле поток вектора через любую замкнутую поверхность равен нулю. Это свойство непосредственно вытекает из формулы (71.8). Таким образом, соленоидальное поле не имеет источников и стоков.
- Соленоидальное поле является полем ротора некоторого векторного поля, т. е. если , то существует такое поле , что . Вектор называется векторным потенциалом поля .
 , что
, что  . Вектор
. Вектор Любое из свойств 1-2 можно было бы взять в качестве определения соленоидального поля.
Доказывать свойство 2 не будем. Отметим лишь, что обратное утверждение — поле ротора векторного поля есть соленоидальное — нами доказано (выше мы показали, что  ).
).
3. В соленоидальном поле поток вектора через поперечное сечение векторной трубки сохраняет постоянное значение (называемое интенсивностью трубки).
Рассмотрим векторную трубку между двумя ее произвольными сечениями  боковую поверхность трубки обозначим через S (см. рис. 280). Поток вектора через замкнутую поверхность, состоящую из
боковую поверхность трубки обозначим через S (см. рис. 280). Поток вектора через замкнутую поверхность, состоящую из  равен нулю. Следовательно,
равен нулю. Следовательно,

где n — внешняя нормаль.
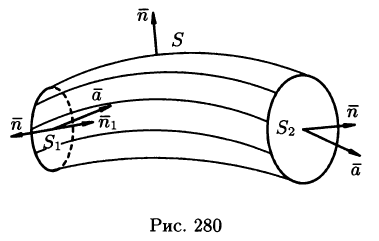
Так как на боковой поверхности векторной трубки нормаль п перпендикулярна к векторам поля, то и, следовательно,
и, следовательно,
Переменив направление нормали на площадке  , т.е. взяв внутреннюю нормаль
, т.е. взяв внутреннюю нормаль  получим:
получим:
В поле скоростей текущей жидкости полученный результат означает, что количество жидкости, втекающей в трубку за единицу времени, равно количеству жидкости, вытекающей из нее.
Потенциальное поле
Векторное поле  называется потенциальным (или безвихревым, или градиентным), если во всех точках поля ротор равен нулю, т. е.
называется потенциальным (или безвихревым, или градиентным), если во всех точках поля ротор равен нулю, т. е.  Примером потенциального поля является электрическое поле напряженности точечного заряда (и другие).
Примером потенциального поля является электрическое поле напряженности точечного заряда (и другие).
Приведем основные свойства потенциального поля.
Свойство 1. Циркуляция потенциального поля по любому замкнутому контуру в этом поле равна нулю.
Это непосредственно вытекает из формулы (71.14). Следовательно,
В частности, для силового потенциального поля это означает, что работа силы по любому замкнутому контуру равна нулю; в поле скоростей текущей жидкости равенство С = 0 означает, что в потоке нет замкнутых струек, т. е. нет водоворотов.
Свойство 2. В потенциальном поле криволинейный интеграл  вдоль любой кривой L с началом в точке
вдоль любой кривой L с началом в точке  и концом в точке
и концом в точке  зависит только от положения точек
зависит только от положения точек  и не зависит от формы кривой.
и не зависит от формы кривой.
Это свойство вытекает из свойства 1. Действительно, взяв в поле две точки соединим их двумя кривыми  так, чтобы контур
так, чтобы контур  лежал внутри поля (см. рис. 281). Тогда, в силу свойства 1, имеем
лежал внутри поля (см. рис. 281). Тогда, в силу свойства 1, имеем

Учитывая свойства криволинейного интеграла, получаем:
т. e.

Свойство 3. Потенциальное поле является полем градиента некоторой скалярной функции U(x; y; z), т. е. если  , то существует функция U (х; у; z) такая, что
, то существует функция U (х; у; z) такая, что 
Из равенства  вытекает, что
вытекает, что  т. е. выражение Pdx + Qdy + Rdz является полным дифференциалом некоторой функции U = U(x;y;z) (следствие 56.1). Эту функцию называют потенциалом векторного поля
т. е. выражение Pdx + Qdy + Rdz является полным дифференциалом некоторой функции U = U(x;y;z) (следствие 56.1). Эту функцию называют потенциалом векторного поля

Отсюда:  Следовательно,
Следовательно,

т. е. вектор поля является градиентом скалярного поля.
Замечание. Из равенства rot grad U = 0 следует обратное утверждение — поле градиента скалярной функции U = U(x;y; z) является потенциальным.
Из равенства  следует, что потенциальное поле определяется заданием одной скалярной функции U = U(x; у; z) — его потенциала. Потенциал векторного поля может быть найден по формуле
следует, что потенциальное поле определяется заданием одной скалярной функции U = U(x; у; z) — его потенциала. Потенциал векторного поля может быть найден по формуле
где  — координаты фиксированной точки, (x;y;z) — координаты произвольной точки. Потенциал определяется с точностью до произвольного постоянного слагаемого (из-за того, что grad (U + а) = grad U ).
— координаты фиксированной точки, (x;y;z) — координаты произвольной точки. Потенциал определяется с точностью до произвольного постоянного слагаемого (из-за того, что grad (U + а) = grad U ).
Произвольное же векторное поле требует задания трех скалярных функций (P(x;y;z), Q(x;y;z), R(x;y,z) — проекции вектора поля на оси координат).
Замечание. Определение потенциального поля может быть дано иначе — векторное поле называется потенциальным, если оно является градиентом некоторого скалярного поля, т. е.  . (Иногда пишут ; знак «минус» пишут для удобства, обычно векторные линии направлены в сторону убывания U: поток жидкости направлен туда, где давление меньше; теплота перемещается от более нагретого места к менее нагретому и т. д.)
. (Иногда пишут ; знак «минус» пишут для удобства, обычно векторные линии направлены в сторону убывания U: поток жидкости направлен туда, где давление меньше; теплота перемещается от более нагретого места к менее нагретому и т. д.)
Пример:
Установить потенциальность поля

и найти его потенциал.
Решение:
Имеем:

Следовательно, поле вектора потенциальное.
Найдем потенциал U по формуле (73.1), выбирая в качестве фиксированной точки начало координат, т. е.  Так как
Так как

то

Гармоническое поле
Векторное поле называется гармоническим (или лапласовым), если оно одновременно является потенциальным и соленоидальным, т. е. если 
Примером гармонического поля является поле линейных скоростей стационарного безвихревого потока жидкости при отсутствии в нем источников и стоков.
Так как поле потенциально, то его можно записать в виде  — потенциал поля.
— потенциал поля.
Но так как поле одновременно и соленоидальное, то

или, что то же самое,
т. е. потенциальная функция U гармонического поля а является решением дифференциального уравнения Лапласа. Такая функция называется, как уже упоминали, гармонической.
Решение заданий и задач по предметам:
- Математика
- Высшая математика
- Математический анализ
- Линейная алгебра
Дополнительные лекции по высшей математике:
- Тождественные преобразования алгебраических выражений
- Функции и графики
- Преобразования графиков функций
- Квадратная функция и её графики
- Алгебраические неравенства
- Неравенства
- Неравенства с переменными
- Прогрессии в математике
- Арифметическая прогрессия
- Геометрическая прогрессия
- Показатели в математике
- Логарифмы в математике
- Исследование уравнений
- Уравнения высших степеней
- Уравнения высших степеней с одним неизвестным
- Комплексные числа
- Непрерывная дробь (цепная дробь)
- Алгебраические уравнения
- Неопределенные уравнения
- Соединения
- Бином Ньютона
- Число е
- Непрерывные дроби
- Функция
- Исследование функций
- Предел
- Интеграл
- Двойной интеграл
- Тройной интеграл
- Интегрирование
- Неопределённый интеграл
- Определенный интеграл
- Криволинейные интегралы
- Поверхностные интегралы
- Несобственные интегралы
- Кратные интегралы
- Интегралы, зависящие от параметра
- Квадратный трехчлен
- Производная
- Применение производной к исследованию функций
- Приложения производной
- Дифференциал функции
- Дифференцирование в математике
- Формулы и правила дифференцирования
- Дифференциальное исчисление
- Дифференциальные уравнения
- Дифференциальные уравнения первого порядка
- Дифференциальные уравнения высших порядков
- Дифференциальные уравнения в частных производных
- Тригонометрические функции
- Тригонометрические уравнения и неравенства
- Показательная функция
- Показательные уравнения
- Обобщенная степень
- Взаимно обратные функции
- Логарифмическая функция
- Уравнения и неравенства
- Положительные и отрицательные числа
- Алгебраические выражения
- Иррациональные алгебраические выражения
- Преобразование алгебраических выражений
- Преобразование дробных алгебраических выражений
- Разложение многочленов на множители
- Многочлены от одного переменного
- Алгебраические дроби
- Пропорции
- Уравнения
- Системы уравнений
- Системы уравнений высших степеней
- Системы алгебраических уравнений
- Системы линейных уравнений
- Системы дифференциальных уравнений
- Арифметический квадратный корень
- Квадратные и кубические корни
- Извлечение квадратного корня
- Рациональные числа
- Иррациональные числа
- Арифметический корень
- Квадратные уравнения
- Иррациональные уравнения
- Последовательность
- Ряды сходящиеся и расходящиеся
- Тригонометрические функции произвольного угла
- Тригонометрические формулы
- Обратные тригонометрические функции
- Теорема Безу
- Математическая индукция
- Показатель степени
- Показательные функции и логарифмы
- Множество
- Множество действительных чисел
- Числовые множества
- Преобразование рациональных выражений
- Преобразование иррациональных выражений
- Геометрия
- Действительные числа
- Степени и корни
- Степень с рациональным показателем
- Тригонометрические функции угла
- Тригонометрические функции числового аргумента
- Тригонометрические выражения и их преобразования
- Преобразование тригонометрических выражений
- Комбинаторика
- Вычислительная математика
- Прямая линия на плоскости и ее уравнения
- Прямая и плоскость
- Линии и уравнения
- Прямая линия
- Уравнения прямой и плоскости в пространстве
- Кривые второго порядка
- Кривые и поверхности второго порядка
- Числовые ряды
- Степенные ряды
- Ряды Фурье
- Преобразование Фурье
- Функциональные ряды
- Функции многих переменных
- Метод координат
- Гармонический анализ
- Вещественные числа
- Предел последовательности
- Аналитическая геометрия
- Аналитическая геометрия на плоскости
- Аналитическая геометрия в пространстве
- Функции одной переменной
- Высшая алгебра
- Векторная алгебра
- Векторный анализ
- Векторы
- Скалярное произведение векторов
- Векторное произведение векторов
- Смешанное произведение векторов
- Операции над векторами
- Непрерывность функций
- Предел и непрерывность функций нескольких переменных
- Предел и непрерывность функции одной переменной
- Производные и дифференциалы функции одной переменной
- Частные производные и дифференцируемость функций нескольких переменных
- Дифференциальное исчисление функции одной переменной
- Матрицы
- Линейные и евклидовы пространства
- Линейные отображения
- Дифференциальные теоремы о среднем
- Теория устойчивости дифференциальных уравнений
- Функции комплексного переменного
- Преобразование Лапласа
- Операционное исчисление
- Системы координат
- Рациональная функция
- Интегральное исчисление
- Интегральное исчисление функций одной переменной
- Дифференциальное исчисление функций нескольких переменных
- Отношение в математике
- Математическая логика
- Графы в математике
- Линейные пространства
- Первообразная и неопределенный интеграл
- Линейная функция
- Выпуклые множества точек
- Система координат

Градие́нт — вектор,
своим направлением указывающий
направление наибольшего возрастания
некоторой величины ![]() ,
,
значение которой меняется от одной
точки пространства к другой (скалярного
поля),
а по величине (модулю) равный быстроте
роста этой величины в этом направлении.
Градиент
скалярной величины – векторная величина,
численно равная производной от этой
функции по направлению нормалей к
поверхности уровня.
Смысл
градиента любой скалярной функции ![]() в
в
том, что его скалярное произведение с
бесконечно малым вектором
перемещения ![]() дает полный
дает полный
дифференциал этой
функции при соответствующем изменении
координат в пространстве, на котором
определена ![]() ,
,
то есть линейную (в случае общего
положения она же главная) часть
изменения ![]() при
при
смещении на ![]() .
.
Применяя одну и ту же букву для обозначения
функции от вектора и соответствующей
функции от его координат, можно написать:

Градиент
численно равен максимальной скорости
изменения функции. Направление градиента
совпадает с направлением быстрейшего
изменения функции.
Вихревые
поля – поля с замкнутыми силовыми линиями.
Создается магнитным полем и индукционным
электрическим полем (при изменении
магнитного потока).
Индукционное
электрическое поле является
вихревым.
Направление
силовых линий вихревого эл. поля совпадает
с направлением индукционного тока
4.Дивергенция вектора. Принцип непрерывности линий магнитной индукции.
Дивергенция
– скалярная характеристика векторного
поля.
Дивергенция
векторного поля скалярная величина,
равная пределу отношения потока через
замкнутую поверхность к объёму,
заключенному внутри этой поверхности,
при условии, что эта плоскость стягивается
к точке.
Она
характеризует интенсивность источников
поля ( если div
F
= 0, то источники поля отсутствуют)
Поток
вектора магнитной индукции ![]() сквозь
сквозь
любую замкнутую поверхность ![]() равен
равен
нулю:
![]() ,
,
где
для однородных изотропных сред
![]() ;
;
![]() –напряженность
–напряженность
магнитного поля; ![]() –
–
абсолютная магнитная проницаемость
среды; ![]() –
–
относительная магнитная проницаемость
среды; ![]() –
–
магнитная постоянная.
Геометрический
смысл закона: линии вектора магнитной
индукции всюду непрерывны и замкнуты.
Этот
принцип определяет, что линии магнитной
индукции непрерывны (магнитное поле не
имеет ни стоков, ни истоков). Линии
магнитной индукции – линии проведенные
(построенные) в магнитном поле так, что
в каждой их точке касательные совпадают
по направлению с вектором ![]() .
.
Рассмотрим
один из простых и наглядных примеров.
На рис.1.5 представлен прямолинейный
провод круглого сечения, ток i в котором
направлен от наблюдателя. Линии магнитной
индукции – концентрические окружности
с центром на оси провода. Направление
линий связано с направлением тока
правилом правого винта.
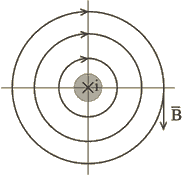
Рис.1.5
Источниками
магнитных полей являются электрические
токи.
Принцип
непрерывности магнитного потока
математически записывается так:
![]() –
–
(1.6.)
магнитный
поток сквозь любую замкнутую поверхность
равен нулю.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Вектор градиента потенциала электростатического поля
§7 Работа силы электростатического поля при перемещении заряда.
Потенциальный характер сил поля.
Циркуляция вектора напряженности
Рассмотрим электростатическое поле, создаваемое зарядом q . Пусть в нем перемещается пробный заряд q 0 . В любой точке поля на заряд q 0 действует сила
де – модуль силы, – орт радиус-вектора , определяющего положение заряда q 0 относительно заряда q . Так как сила меняется от точки к точке, то работу силы электростатического поля запишем как работу переменной силы:
Ввиду того, что рассматривали перемещение заряда из точки 1 в точку 2 по произвольной траектории, можно сделать вывод, что работа по перемещению точечного заряда в электростатическом поле не зависит от формы пути, а определяется лишь начальным и конечным положением заряда. Это свидетельствует о том, что электростатическое поле является потенциальным, а сила Кулона – консервативной силой. Работа по перемещению заряда в таком поле по замкнутому пути всегда рвана нулю.
– проекция на направление контура ?.
Учтем, что работа по замкнутому пути равно нулю
– ЦИРКУЛЯЦИЯ вектора напряженности.
Циркуляция вектора напряженности электростатического поля, взятая по произвольному замкнутому контуру всегда равна нулю.
§7 Потенциал.
Связь между напряженностью и потенциалом.
Градиент потенциала.
Эквипотенциальные поверхности
Поскольку электростатическое поле является потенциальным работа по перемещению заряда в таком поле может быть представлена, как разность потенциальных энергий заряда в начальной и конечной точках пути. (Работа равна уменьшению потенциальной энергии, или изменению потенциальной энергии, взятому со знаком минус.)
Постоянную определяют из условия, что при удалении заряда q 0 на бесконечность его потенциальная энергия должна быть равна нулю.
.
Различные пробные заряды q 0 i , помещенные в данную точку поля будут обладать в этой точке различными потенциальными энергиями:
…
Отношение W пот i к величине пробного заряда q 0 i , помещенного в данную точку поля является величиной постоянной для данной точки поля для всех пробных зарядов. Это отношение называется ПОТЕНЦИАЛОМ.
ПОТЕНЦИАЛ – энергетическая характеристика электрического поля. ПОТЕНЦИАЛ численно равен потенциальной энергии, которой обладает в данной точке поля единичный положительный заряд.
Работу по перемещению заряда можно представить в виде
.
Потенциал измеряется в Вольтах
ЭКВИПОТЕНЦИАЛЬНЫМИ ПОВЕРХНОСТЯМИ называются поверхности равного потенциала (φ = const ). Работа по перемещению заряда вдоль эквипотенциальной поверхности равна нулю.
Связь между напряженностью и потенциалом φ можно найти, исходя из того, что работу по перемещению заряда q на элементарном отрезке d ? можно представить как
С другой стороны
– градиент потенциала.
Напряженность поля равна градиенту потенциала, взятому со знаком минус.
Градиент потенциала показывает, как меняется потенциал на единицу длины. Градиент перпендикулярен функции и направлен в сторону возрастания функции. Следовательно, вектор напряженности перпендикулярен эквипотенциальной поверхности и направлен в сторону убывания потенциала.
Рассмотрим поле, создаваемое системой N точечных зарядов q 1 , q 2 , … qN . Расстояния от зарядов до данной точки поля равны r 1 , r 2 , … rN . Работа, совершаемая силами этого поля над зарядом q 0 , будет равна алгебраической сумме работ сил, каждого заряда в отдельности.
гле
Потенциал поля, создаваемого системой зарядов, определяется как алгебраическая сумма потенциалов, создаваемых в этой же точке каждым зарядом в отдельности.
§9 Вычисление разности потенциалов плоскости, двух плоскостей, сферы, шара, цилиндра
Используя связь между φ и определим разность потенциалов между двумя произвольными точками
Разность потенциалов поля равномерно заряженной бесконечной плоскости с поверхностной плотностью заряда σ.
2. Разность потенциалов поля двух бесконечных параллельных разноименно заряженных плоскостей с поверхностной плотностью заряда σ.
Если х1 = 0; х2 = d , то или
3. Разность потенциалов поля равномерно заряженной сферической поверхности радиуса R .
Внутри сферической поверхности потенциал всюду одинаков и равен
4. Разность потенциалов поля объемно заряженного шара радиуса R с общим зарядом Q.
Вне шара r 1 , r 2 > R ,
Внутри шара
5. Разность потенциалов поля равномерно заряженного цилиндра (или бесконечно длинной нити).
r > R :
Градиент потенциала
Градиент потенциала – это скорость возрастания потенциала в направлении кротчайшем между двумя точками.
Между двумя точками имеется некоторая разность потенциалов. Если эту разность разделить на кратчайшее расстояние между взятыми точками, то полученное значение будет характеризовать скорость изменения потенциала в направлении кратчайшего расстояния между точками.
Градиент потенциала показывает направление наибольшего возрастания потенциала, численно равен модулю напряженности и отрицательно направлен по отношению к нему.
В определении градиента существенны два положения:
1) Направление, в котором берутся две близлежащие точки, должно быть таким, чтобы скорость изменения была максимальной.
2) Направление таково, что скалярная функция в этом направлении возрастает.


Для декартовой системы координат:

Скорость изменения потенциала в направлении оси Х, Y, Z:
 ;
;  ;
; 
Два вектора равны только тогда, когда равны друг другу их проекции. Проекция вектора напряженности на ось Х равна проекции скорости изменения потенциала вдоль оси Х, взятой с обратным знаком. Аналогично для осей Y и Z.
 ;
;  ;
;  .
.
В цилиндрической системе координат выражение градиента потенциала будет иметь следующий вид:
 .
.
А в сферической системе координат:
 .
.
Дифференциальный оператор Гамильтона (оператор Набла)
Для сокращения записи операций над скалярными и векторными величинами употребляют дифференциальный оператор Гамильтона или оператор Набла:
Под дифференциальным оператором Гамильтона понимают сумму частных производных по 3-м координатным осям, умноженных на соответствующие единичные векторы (орты).
Применим оператор Гамильтона к потенциалу:


Правые части одинаковы, значит, будут одинаковы и левые части:

Оператор Гамильтона сочетает в себе как векторные, так и скалярные свойства и может быть применен к скалярным и векторным функциям.
Дата добавления: 2015-07-30 ; просмотров: 19610 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Градиент потенциальных характеристик, как его рассчитать и пример
градиент потенциала является вектором, который представляет отношение изменения электрического потенциала по отношению к расстоянию в каждой оси декартовой системы координат. Таким образом, вектор градиента потенциала указывает направление, в котором скорость изменения электрического потенциала больше, в зависимости от расстояния.
В свою очередь, модуль градиента потенциала отражает скорость изменения электрического потенциала в определенном направлении. Если значение этого известно в каждой точке пространственной области, то электрическое поле может быть получено из градиента потенциала.
Электрическое поле определяется как вектор, с которым оно имеет определенное направление и величину. Определяя направление, в котором электрический потенциал уменьшается быстрее, удаляясь от контрольной точки, и деля это значение на пройденное расстояние, получается величина электрического поля..
- 1 Характеристики
- 2 Как рассчитать?
- 3 Пример
- 3.1 Упражнение
- 4 Ссылки
черты
Градиент потенциала представляет собой вектор, ограниченный конкретными пространственными координатами, который измеряет отношение изменения между электрическим потенциалом и расстоянием, пройденным этим потенциалом.
Наиболее выдающиеся характеристики градиента электрического потенциала подробно описаны ниже:
1- Потенциальный градиент – это вектор. Следовательно, он имеет определенную величину и направление.
2- Поскольку потенциальный градиент является вектором в пространстве, он имеет величины, адресованные по осям X (ширина), Y (высокая) и Z (глубина), если в качестве эталонной системы координат берется декартова система координат.
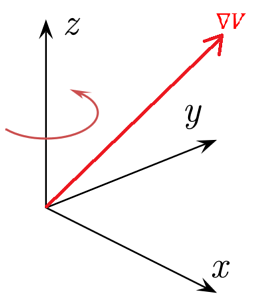
3- Этот вектор перпендикулярен эквипотенциальной поверхности в точке, в которой оценивается электрический потенциал.
4- Вектор градиента потенциала направлен в направлении максимального изменения функции электрического потенциала в любой точке..
5- Модуль градиента потенциала равен модулю, полученному из функции электрического потенциала по отношению к расстоянию, пройденному в направлении каждой из осей декартовой системы координат..
6- Потенциальный градиент имеет нулевое значение в стационарных точках (максимальная, минимальная и седловая точки).
7- В международной системе единиц (СИ) единицами измерения градиента потенциала являются вольт / метры.
8. Направление электрического поля такое же, в котором электрический потенциал уменьшает свою величину быстрее. В свою очередь, градиент потенциала указывает в направлении, в котором потенциал увеличивает свое значение по отношению к изменению положения. Тогда электрическое поле имеет то же значение градиента потенциала, но с противоположным знаком.
Как рассчитать?
Разность электрических потенциалов между двумя точками (точка 1 и точка 2) определяется следующим выражением:
V1: электрический потенциал в точке 1.
V2: электрический потенциал в точке 2.
E: величина электрического поля.
Ѳ: угол наклона вектора электрического поля, измеренного относительно системы координат.
Выражая указанную формулу дифференциальным способом, получаем следующее:

Коэффициент E * cos (Ѳ) относится к модулю компонента электрического поля в направлении dl. Пусть L – горизонтальная ось плоскости отсчета, тогда cos (Ѳ) = 1, вот так:
Далее, отношение между изменением электрического потенциала (dV) и изменением пройденного расстояния (ds) является модулем градиента потенциала для упомянутого компонента.
Из этого следует, что величина градиента электрического потенциала равна компоненте электрического поля в направлении исследования, но с противоположным знаком.
Однако, поскольку реальная среда является трехмерной, градиент потенциала в данной точке должен быть выражен как сумма трех пространственных компонентов на осях X, Y и Z декартовой системы..
Разбивая вектор электрического поля на три прямоугольных компонента, мы получаем следующее:

Если в плоскости имеется область, в которой электрический потенциал имеет одинаковое значение, частная производная этого параметра по каждой из декартовых координат будет равна нулю.
Таким образом, в точках, которые находятся на эквипотенциальных поверхностях, напряженность электрического поля будет иметь нулевую величину.
Наконец, вектор градиента потенциала может быть определен как точно такой же вектор электрического поля (по величине) с противоположным знаком. Таким образом, мы имеем следующее:
пример
Из приведенных выше расчетов необходимо:
Теперь, прежде чем определять электрическое поле как функцию градиента потенциала или наоборот, сначала необходимо определить направление, в котором разность электрических потенциалов растет..
После этого определяется коэффициент изменения электрического потенциала и изменения пройденного расстояния..
Таким образом, мы получаем величину соответствующего электрического поля, которая равна величине градиента потенциала в этой координате.
осуществление
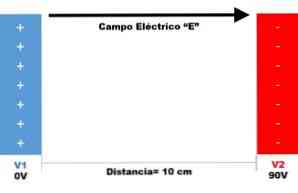
Есть две параллельные пластины, как показано на следующем рисунке.
Шаг 1
Направление роста электрического поля на декартовой системе координат определяется.
Электрическое поле растет только в горизонтальном направлении, учитывая расположение параллельных пластин. Следовательно, можно сделать вывод, что компоненты градиента потенциала на оси Y и оси Z равны нулю..
Шаг 2
Данные, представляющие интерес различаются.
– Разность потенциалов: dV = V2 – V1 = 90 В – 0 В => dV = 90 В.
– Разница в расстоянии: дх = 10 сантиметров.
Чтобы обеспечить соответствие единиц измерения, используемых в соответствии с Международной системой единиц, величины, не выраженные в СИ, должны быть соответственно преобразованы. Таким образом, 10 сантиметров равны 0,1 метра, и, наконец, dx = 0,1 м.
Шаг 3
Величина вектора градиента потенциала рассчитывается соответствующим образом.
[spoiler title=”источники:”]
http://helpiks.org/4-37431.html
http://ru.thpanorama.com/articles/electrnica/gradiente-de-potencial-caractersticas-cmo-calcularlo-y-ejemplo.html
[/spoiler]
Градиент (от , род. падеж gradientis — шагающий болт ) — характеристика, показывающая направление наискорейшего возрастания некоторой величины, значение которой меняется от одной точки пространства к другой. Например, если взять высоту поверхности Земли над уровнем моря (2-мерное пространство), то её градиент в каждой точке поверхности будет показывать «в горку».
Как видно из объяснения, градиент является векторной функцией, а величина, которую он характеризует — функцией скалярной.
Формально, для случая трёхмерного пространства, градиентом называется векторная функция с компонентами  ,
,  ,
,  , где φ — некоторая скалярная функция координат x, y, z.
, где φ — некоторая скалярная функция координат x, y, z.
Если  — функция n переменных
— функция n переменных  , то её градиентом будет n-мерный вектор
, то её градиентом будет n-мерный вектор
- ,

компоненты которого равны частным производным по всем её аргументам.
Градиент обозначается  или, с использованием оператора набла,
или, с использованием оператора набла,  .
.
Из определения градиента следует, что:

Свойства
Для любого постоянного числа  и скалярных полей
и скалярных полей  справедливо следующее:
справедливо следующее:

Линейность


Правило Лейбница
Пример
Например, градиент функции  будет представлять собой:
будет представлять собой:

В физике
В различных отраслях физики используется понятие градиента различных физических полей.
Например, градиент концентрации — нарастание или уменьшение по какому-либо направлению концентрации растворённого вещества, градиент температуры – увеличение или уменьшение по направлению температуры среды и т.д.. Градиент может быть вызван различными причинами, например, механическим препятствием, действием электромагнитных, гравитационных или других полей или различием в растворяющей способности граничащих фаз, например, октанол/вода.
Связь с производной по направлению
Используя правило дифференцирования сложной функции, нетрудно показать, что
производная функции по направлению  равняется скалярному
равняется скалярному
произведению градиента на единичный вектор :

Таким образом, для вычисления производной по любому направлению достаточно знать
градиент функции, то есть набор всех её частных производных.
Градиент в ортогональных криволинейных координатах
- ,

где Hi – коэффициенты Ламе.
Цилиндрические координаты
Коэффициенты Ламе:
- .

Отсюда:
- .

Сферические координаты
Коэффициенты Ламе:
- .

Отсюда:
- .

См. также
- Векторный анализ
- Теорема Остроградского-Гаусса
- Формулы векторного анализа
- Теория поля
bg:Градиент
cs:Gradient
he:גרדיאנט
nl:Gradiënt
pl:Gradient (matematyka)
sl:Gradient
sv:Gradient
uk:Градієнт
