Инвариантные подпространства
Определение инвариантных подпространств
Пусть — линейное преобразование линейного пространства
. Линейное подпространство
называется инвариантным относительно преобразования
, если образ любого вектора из
принадлежит подпространству
, т.е.
. Другими словами, инвариантное подпространство
включает свой образ
. Нулевое подпространство
и все пространство
являются инвариантными подпространствами для любого линейного преобразования
.
Пусть — инвариантное подпространство относительно преобразования
. Линейный оператор
, рассматриваемый как линейное преобразование пространства
в себя, называется сужением (ограничением) линейного преобразования
на инвариантное подпространство
и обозначается
, или
. Для всех векторов
выполняется равенство
, т.е.
образы, порождаемые оператором
и его сужением
, совпадают.
Примеры инвариантных подпространств
Рассмотрим инвариантные подпространства линейных операторов (преобразований).
1. Для нулевого преобразования любое подпространство
является инвариантным, так как
. Сужение нулевого преобразования
является нулевым преобразованием.
2. Для тождественного преобразования любое подпространство
является инвариантным, так как
. Сужение тождественного преобразования
является тождественным преобразованием.
3. Для центральной симметрии любое подпространство
является инвариантным, так как
. Сужение центральной симметрии
является центральной симметрией.
4. Для гомотетии любое подпространство
является инвариантным, так как
(при
). Сужение гомотетии
является гомотетией.
5. Для поворота плоскости (при
) имеются два инвариантных подпространства: нулевое
и вся плоскость
. Других инвариантных подпространств нет.
6. Для оператора дифференцирования каждое из подпространств
является инвариантным, так как при дифференцировании степень многочлена уменьшается.
7. Рассмотрим оператор проектирования на подпространство
параллельно подпространству
. Здесь
для
. Для этого оператора подпространства
и
инвариантные, так как
и
. Сужение оператора проектирования на подпространство
является тождественным преобразованием
, а сужение на подпространство
— нулевым
.
8. Рассмотрим оператор отражения в подпространстве
параллельно подпространству
. Здесь
для
. Для этого оператора подпространства
и
инвариантные, так как
и
. Сужение оператора отражения на подпространство
является тождественным преобразованием
, а сужение на подпространство
— центральной симметрией
, так как
.
9. В пространстве радиус-векторов пространства, отложенных от фиксированной точки
, рассмотрим поворот на угол
, вокруг оси
, заданной радиус-вектором
. Подпространство
инвариантно относительно этого преобразования, так как любой вектор, принадлежащий
, не изменяется в результате поворота, т.е. отображается в себя. Подпространство
— радиус-векторов, принадлежащих плоскости, перпендикулярной оси вращения, также инвариантное, так как в результате поворота все эти радиус-векторы остаются в той же плоскости.
Свойства инвариантных подпространств
1. Если — инвариантное подпространство относительно обратимого линейного преобразования
, то его сужение
также обратимое линейное преобразование.
2. Для любого линейного преобразования ядро
и образ
являются инвариантными подпространствами, так как
и
3. Если — инвариантное подпространство относительно линейного преобразования
, то
— инвариантно относительно любой натуральной степени этого преобразования, причем
В самом деле, каждое из указанных множеств является линейным подпространством, так как это образы сужений линейных операторов, например, . Докажем, например, включение
. Для любого
существует вектор
, что
. Следовательно,
.
4. Если — инвариантное подпространство относительно линейного преобразования
, то
— инвариантно относительно любого многочлена от этого преобразования.
Теорема (9.2) о матрицах оператора и его сужения на инвариантное подпространство
Пусть — линейное преобразование n-мерного пространства
, а
— подпространство, инвариантное относительно преобразования
. Тогда существует базис
пространства
, в котором матрица
преобразования
имеет нулевой угол:
где — матрица сужения
преобразования
на подпространство
,
— нулевая матрица размеров
. И наоборот, если в некотором базисе
матрица
преобразования
имеет нулевой угол (нулевую матрицу
размеров
), то преобразование
имеет ℓ-мерное инвариантное подпространство.
В самом деле, возьмем базис подпространства
и дополним его векторами
до базиса
всего пространства
. Раскладывая образы первых
базисных векторов по этому базису, получаем
так как . Следовательно, последние
элементов первых
столбцов матрицы
преобразования
равны нулю. Обратное утверждение доказывается, проводя аналогичные рассуждения в обратном порядке.
Следствие. Если n-мерное пространство представлено в виде прямой суммы ненулевых инвариантных относительно преобразования
подпространств
, то существует базис, в котором матрица преобразования имеет блочно-диагональный вид
где — матрица сужения
преобразования
на подпространство
.
Например, рассмотрим операторы проектирования и отражения
. Объединяя базисы подпространств
и
, получаем базис пространства
, в котором матрицы преобразований имеют блочно-диагональный вид
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
Пусть
: V
V
– линейный
оператор, W
–
подпространство в V.
Оно называется -инвариантным,
если
w
W
(w)
W.
Будем использовать обозначение W
V.
Примеры.
1. Очевидно,
что {0}
V
и V
V
для любого линейного оператора
: V
V
.
2.
Если
: V
V
– линейный оператор, то Ker()
V
и Im()
V
, т.к.
k
Ker()
(k)
= 0
Ker()
и
v
Im()
(v)
Im().
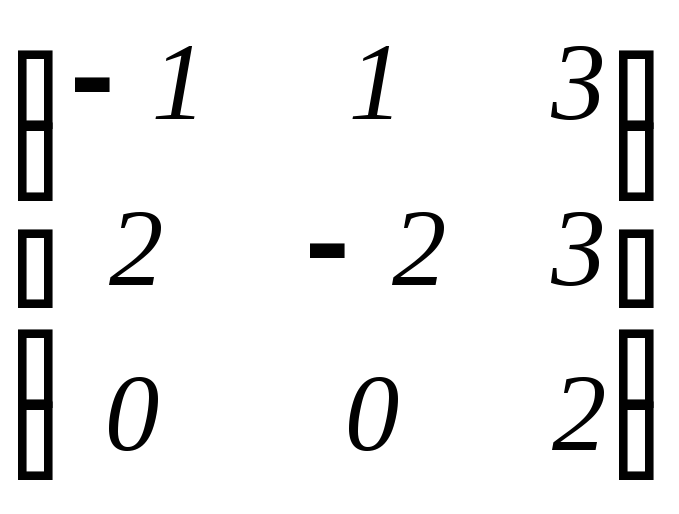
3.
Пусть линейный оператор
: V
V
имеет в базисе {e1
, e2
, e3}
матрицу

. Тогда
пространство L(e1
, e2)
является
–инвариантным.
Действительно,
по определению матрицы линейного
оператора имеем
(e1)
= (e1
, e2
, e3)![]() = –e1
= –e1
+ 2e2
L(e1
, e2),
(e2)
= (e1
, e2
, e3)![]() = =e1
= =e1
– 2e2
L(e1
, e2)
и поэтому
l
= 1e1
+ 2e2
L(e1
, e2)
верно
включение (l)
= 1(e1)
+ 2(e2)
L(e1
, e2).
Оказывается,
пример 3
отражает общую ситуацию, как показывает
следующая
Лемма
(об инвариантных подпространствах
линейного оператора).
Следующие
условия для линейного оператора
: V
V
и подпространства W
в
n-мерном
векторном пространстве V
эквивалентны:
(1)
подпространство W
является -инвариантным,
-
для
некоторого базиса (w1
, … , wk)
пространства W
выполнены
условия (wi)
W
(1
i
k).
Кроме того,
эквивалентны следующие утверждения:
(3)
существует собственное -инвариантное
подпространство W
(т.е. {0}
W
V,
(W)
W),
(4)
в некотором базисе e
= (e1
, … , en)
пространства V
матрица линейного оператора
имеет полураспавшийся вид []e
=
![]() ,
,
гдеA
M(k,
F),
B
M(n
– k,
F),
C
M(k,
n
– k,
F).
Доказательство.
(1)
(2) Если
W
– –инвариантное
подпространство, то
w
W
(w)
W.
В частности, это выполнено и для векторов
любого базиса (w1
, … , wk)
пространства
W.
(2)
(1) Пусть
теперь для векторов некоторого базиса
(w1
, … , wk)
пространства
W
выполнено условие (wi)
W (1
i
k).
Докажем, что
w
W
(w)
W:
если w
= 1w1
+ … + kwk
– разложение
по базису, то (w)
= = 1(w1)+…+k(xk)
W.
(3)
(4) Пусть W
– собственное –инвариантное
подпространство с базисом {e1
, … , ek}
и 0
< dim
W
= k
< dim
V
= n.
Дополним этот базис до базиса всего
пространства V
векторами ek+1
, … , en
и рассмотрим
матрицу линейного оператора
в
расширенном базисе e
= (e1
, … , ek
, ek+1
, … , en
). Имеем
[]e
=
![]() ,
,
где A
M(k, F), B
M(n – k, F), C
M(k, n – k, F) и
D
M(n – k, k, F).
Первые k её
столбцов – это координатные столбцы
[(e1)]e
, … , [(ek)]e
, причём ввиду –инвариантности
подпространства W
= L(e1
, … , ek)
выполнены
включения (ei)
L(e1
, … , ek)
(1
i
k). Таким
образом, (ei)
= a1ie1
+ … + akiek
+ 0ek+1
+ … 0en
, т.е. D
= 0(n–k)k
и матрица оператора полураспавшаяся
в выбранном базисе.
(4)
(3) Пусть в
некотором базисе e
= (e1
, … , ek
, ek+1
, … , en
) пространства
V
матрица []e
полураспавшаяся
[]e
=
![]() .
.
Докажем, что пространство W
= L(e1
, … , ek)
является
–инвариантным
подпространством в V.
Действительно,
(ei)
= (e1
, … , ek
, ek+1
, … , en)[]e(i)
= (e1
, … , ek
, ek+1
, … , en)![]() =
=
=
(e1
, … , ek)a(i)
= a1ie1
+ … + akiek
L(e1
, … , ek)
= W.
Таким
образом, подпространство W
является
–инвариантным.
Лемма
доказана.
Упражнения:
1. Найдите
все
инвариантные подпространства линейного
оператора
: V
V
с матрицей []e
=
в некотором базисе {e1
, e2
, e3}.
2.
Найдите все
инвариантные подпространства линейного
оператора
: V
V
с матрицей []e
=

в некотором базисе {e1
, e2
, e3}.
Особенно часто
используются одномерные инвариантные
подпространства, к изучению которых мы
сейчас переходим.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Помогаю со студенческими работами здесь
") Понятия линейного многообразия и подпространства
Понятия линейного многообразия и подпространства
Чем отличаются понятия линейных многообразия и подпространства?
По определениям из статей вики…
Выписать базис линейного подпространства
Добрый день! Дана такая задача:
Выписать базис линейного подпространства
L = left ( 3a -…
Найти все подпространства
В пространстве функций Span{sin(t),cos(t),…,sin(nt),cos(nt)}, n in N, найти все подпространства,…
Найти матрицу линейного оператора
5. Оператор Фи переводит векторы a1,a2,a3 соответственно в векторы b1,b2,b3 . Найти матрицу…
Найти матрицу линейного оператора
найти матрицу линейного оператора переводящего стандартный базис е1=(1,0,0),е2=(0,1,0).е3=(0,0,1)…
Найти матрицу линейного оператора
Может ли кто-нибудь помочь мне с этой задачей, пожалуйста.
Спасибо.
Наитй матрицу линейного…
Искать еще темы с ответами
Или воспользуйтесь поиском по форуму:
8
