Фундаментальным
вопросом теории линейных пространств
является вопрос о том, можно ли, а если
можно, то как, произвольный вектор
пространства представить в виде линейной
комбинации фиксированного набора
векторов из этого пространства. Далее
мы получим ответ на этот вопрос.
Система
линейно независимых векторов
![]() векторного пространства
векторного пространства![]() называетсябазисом
называетсябазисом
этого пространства, если любой вектор
из
![]() может быть представлен в виде линейной
может быть представлен в виде линейной
комбинации векторов этой системы, т.е.
для каждого вектора![]() существуют вещественные числа
существуют вещественные числа![]() такие, что имеет место равенство
такие, что имеет место равенство
![]() .
.
Это
равенство называется разложением
вектора
![]()
по базису
![]() ,
,
а числа![]() называютсякоординатами
называютсякоординатами
вектора
![]() относительно базиса
относительно базиса
(или в базисе)
![]() .
.
Утверждение
Базисом
линейного пространства решений
однородной системы является ее
фундаментальная система решений.
ТЕОРЕМА
(о единственности разложения по базису).
Каждый вектор
![]() пространства
пространства![]() может быть разложен по базису
может быть разложен по базису
![]() единственным
единственным
образом, т.е. координаты каждого вектора
![]() в базисе
в базисе
![]()
определяются однозначно.
Главное
значение базиса заключается в том, что
операции сложения векторов и умножения
их на числа при задании базиса превращаются
в соответствующие операции над числами
– координатами этих векторов. А именно,
справедлива следующая
ТЕОРЕМА.
При сложении
двух любых векторов линейного пространства
![]() их координаты (относительно любого
их координаты (относительно любого
базиса пространства) складываются; при
умножении
произвольного вектора на любое число
![]() все координаты этого вектора умножаются
все координаты этого вектора умножаются
на![]() .
.
Типовой
пример
Исследуем
вопрос о базисе пространства
![]() ,
,
введенного ранее при рассмотрении
Типовой примеров векторных пространств.
Покажем, что![]() элементов
элементов![]() указанного пространства образуют базис.
указанного пространства образуют базис.
►Во-первых,
эти векторы линейно независимы. Проверка
линейной независимости набора
![]() состоит в определении значений
состоит в определении значений![]() ,
,
при которых возможно равенство
![]() .
.
Но в
силу только что доказанной теоремы
![]() ,
,
а
последний вектор является нулевым лишь
при условии
![]() .
.
Во-вторых, всякий вектор![]() заведомо представим в виде линейной
заведомо представим в виде линейной
комбинации векторов![]() :
:![]() и, значит, набор
и, значит, набор![]() образует базис. ◄
образует базис. ◄
Векторное
пространство
![]() называется
называется
![]() -мерным,
-мерным,
если в нем существуют![]() линейно независимых векторов, а любые
линейно независимых векторов, а любые![]() векторов уже являются линейно зависимыми.
векторов уже являются линейно зависимыми.
При этом число![]() называетсяразмерностьюпространства
называетсяразмерностьюпространства![]() .
.
Размерность
векторного пространства, состоящего
из одного нулевого вектора, принимается
равной нулю.
Размерность
пространства
![]() обычно обозначают символом
обычно обозначают символом![]() .
.
Векторное
пространство
![]() называетсябесконечномерным, если
называетсябесконечномерным, если
в нем существует любое число линейно
независимых векторов. В этом случае
пишут![]() .
.
Выясним
связь между понятиями базиса и размерности
пространства.
ТЕОРЕМА.Если
![]() – векторное пространство размерности
– векторное пространство размерности![]() ,
,
то любые![]() линейно независимых векторов этого
линейно независимых векторов этого
пространства образуют его базис.
ТЕОРЕМА.Если векторное пространство
![]() имеет базис, состоящий из
имеет базис, состоящий из![]() векторов, то
векторов, то![]() .
.
Утверждение
![]() Rn=n.
Rn=n.
Типовые примеры
-
Образуют
ли базис в пространстве R3
векторы
 ?
?
►По
определению базис составляют линейно
независимые векторы. Линейная зависимость
(или независимость) определяется исходя
из анализа равенства нулю линейной
комбинации этих векторов:
![]() .
.
Последнее
векторное уравнение после записи его
по компонентам представляет собой
систему трёх однородных уравнений
относительно
![]() .
.
Согласно схеме исследования линейной
зависимости векторов вычислим
определитель матрицы, составленной из
координат векторов

Определитель
системы равен нулю, следовательно, она
имеет нетривиальное решение и это
означает, что исходная группа векторов
линейно зависима и не образует базис в
R3. ◄
2.Найти
размерность и один из базисов линейного
пространства решений однородной системы:
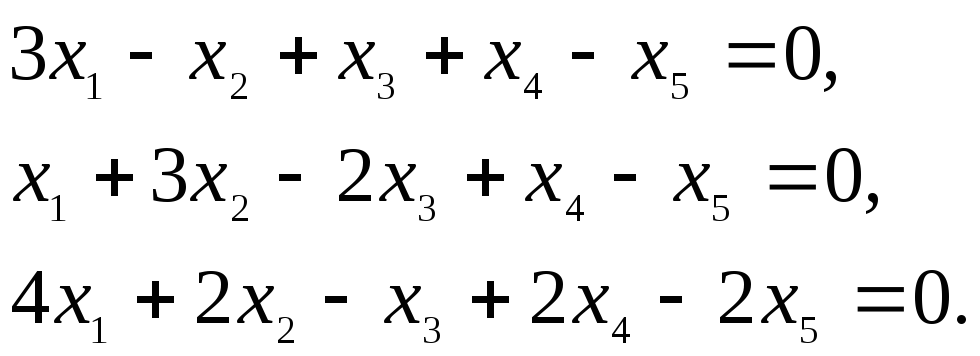
►Представленная
система состоит из трёх уравнений и
содержит 5 неизвестных. Выпишем матрицу
системы и упростим её с помощью
элементарных преобразований, сначала
поменяв местами строки 1 и 2, а затем
вычитая новую первую строку, умноженную
на 3 и 4, соответственно из второй и
третьей строк :

Видно,
что ранг матрицы
![]() равен 2. Следовательно, две неизвестные
равен 2. Следовательно, две неизвестные
являются главными, а три – свободными.
Значит ФСР системы содержит 5-2=3 линейно
независимых решения. Выберем в качестве
главных![]() .
.
Это можно сделать, т.к. минор 2-го порядка,
составленный из коэффициентов при этих
неизвестных, отличен от нуля. Система,
соответствующая преобразованной
матрице, имеет вид
![]()
Отсюда,
выражая главные неизвестные через
свободные, получим общее решение
![]()
Или иначе:
 .
.
Фундаментальная
совокупность решений является базисом
линейного пространства решений исходной
системы и в данном случае имеет вид

Размерность
искомого пространства равна 3.◄
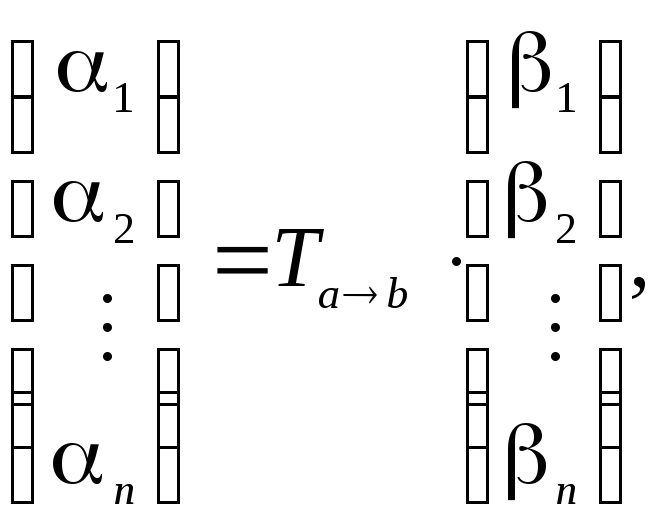
Матрицей
переходаот базиса![]() к базису
к базису![]() называется матрица вида
называется матрица вида

где
для каждого
![]() в
в
![]() -ом
-ом
столбце стоят координаты![]() вектора
вектора![]() в базисе
в базисе![]() .
.
Утверждение
Координаты
![]() вектора
вектора![]() в базисе
в базисе![]() и координаты
и координаты![]() этого же вектора в базисе
этого же вектора в базисе![]() связаны равенством
связаны равенством
где
![]() – матрица перехода от базиса
– матрица перехода от базиса![]() к базису
к базису![]() .
.
Утверждение.
Матрица перехода
![]() от базиса
от базиса![]() к базису
к базису![]() и матрица обратного перехода
и матрица обратного перехода![]() от базиса
от базиса![]() к базису
к базису![]() связаны равенством
связаны равенством![]() =
=![]() .
.
Типовые
примеры
1.Найти координаты вектора![]() в базисе
в базисе![]() ,
,
если известно
![]()
►В
соответствии с определением матрица
перехода от базиса
![]() к базису
к базису![]() есть
есть
![]() .
.
Обозначим
координаты вектора
![]() в базисе
в базисе![]() через
через![]() ,
,
а в базисе![]() через
через![]() .
.
Искомые координаты![]() связаны с известными координатами
связаны с известными координатами![]() следующим соотношением:
следующим соотношением:
 .
.
Видно,
что для получения координат
![]() необходимо вычислить матрицу, обратную
необходимо вычислить матрицу, обратную![]() .
.
Используя стандартную процедуру, имеем
![]() .
.
Вычислим теперь координаты
![]() :
:
 .
.
◄
-
Найти матрицу
перехода от базиса
 к базисупо данным разложениям этих векторов
к базисупо данным разложениям этих векторов
в базисе:
![]() .
.
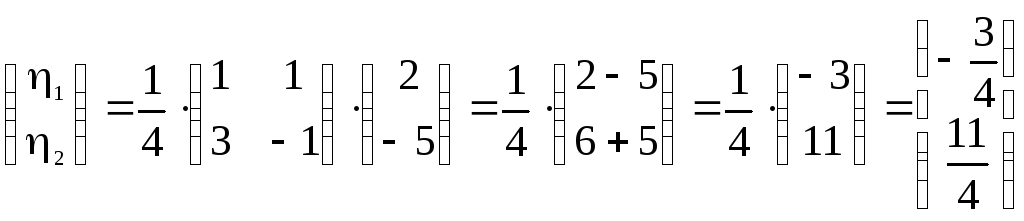
►Чтобы
построить матрицу
![]() перехода
перехода
от базиса![]() к базису
к базису![]() ,
,
необходимо найти разложение векторов![]() по базису
по базису![]() .
.
Сделаем это, представив![]() в виде разложения по
в виде разложения по![]() с неизвестными координатами, которые
с неизвестными координатами, которые
требуется определить:
![]() ,
,
или с
учётом вида этих векторов в базисе
![]()
![]() .
.
Откуда для координат
![]() имеем
имеем
Теперь,
зная разложение
![]() по
по![]() ,
,
выпишем матрицу![]() :
:
![]() .◄
.◄
5. Линейные оболочки
и подпространства
Подпространством ![]() линейного пространства
линейного пространства![]() называется множество векторов из
называется множество векторов из![]() такое, что для любых двух векторов
такое, что для любых двух векторов![]() и
и![]() из
из![]() и любых двух вещественных чисел
и любых двух вещественных чисел![]() и
и![]() линейная комбинация
линейная комбинация![]() также принадлежит
также принадлежит![]() .
.
Утверждение. Подпространство само
является линейным пространством.
Линейной оболочкойсистемы векторов![]() называется множество всех линейных
называется множество всех линейных
комбинаций векторов![]() .
.
Обозначается![]() .
.
Утверждение. Линейная оболочка системы
векторов является подпространством.
Пересечениемдвух подпространств![]() и
и
![]() называется множество всех векторов,
называется множество всех векторов,
принадлежащих одновременно и![]() ,
,
и
![]() .
.
Обозначается
![]() .
.
Суммой двух подпространств![]() и
и
![]() называется множество всех векторов
называется множество всех векторов![]() ,
,
представимых в виде![]() ,
,
где![]()
![]() ,
,
![]()
![]() .
.
Обозначается
![]() .
.
Утверждение. Сумма и пересечение
подпространств
![]() и
и
![]()
являются линейными пространствами, и
их размерности связаны равенством
![]()
![]() +
+![]()
![]() =
=![]()
![]() +
+![]()
![]() .
.
Сумма
двух подпространств называется прямой
суммой, если
пересечение этих подпространств состоит
только из нулевого вектора.
Типовой пример
Найти размерность и какой-нибудь базис
суммы и пересечения подпространств,
порождённых векторами
![]() .
.
►Вычислим вначале размерность
подпространств. С этой целью установим,
являются ли линейно независимыми
векторы, порождающие данные подпространства.
Для подпространства
![]() ,
,
порождённого векторами![]() ,
,
равенство нулю линейной комбинации![]() ,
,
эквивалентное системе уравнений![]() ,
,
достигается лишь при условии![]() .
.
Следовательно, векторы![]() линейно независимы и размерность
линейно независимы и размерность
подпространства![]() равна 2:
равна 2:![]() .
.
Для подпространства![]() ,
,
порождённого векторами![]() ,
,
проводя аналогичный анализ, получим![]() .
.
Вычислим теперь размерность пересечения
подпространств
![]() и
и![]() .
.
По определению векторы, составляющие
пересечение, принадлежат одновременно
обоим подпространствам. Произвольный
вектор![]() подпространства
подпространства![]() является линейной комбинацией базисных
является линейной комбинацией базисных
векторов![]() :
:![]() .
.
Аналогично для подпространства![]() имеем
имеем![]() ,
,
тогда условие принадлежности пересечению
есть![]() или
или![]() .
.
Это условие представляет собой систему
уравнений относительно коэффициентов
![]() .
.
Составим матрицу системы и упростим её
с помощью элементарных преобразований:

Как видно ранг системы равен 3. Значит
ФСР состоит из одного линейно независимого
вектора. Найдём его, решив систему
уравнений, соответствующих последней
матрице, получим
![]() ,
,
откуда
![]() .
.
Полагая свободное неизвестное
![]() ,
,
для остальных имеем
![]() .
.
Итак, пересечение подпространств![]() имеет
имеет
один базисный вектор
![]() .
.
Размерность пересечения
![]() .
.
Следовательно, в соответствии с равенством
![]()
![]()
размерность суммы подпространств
![]() .
.
В качестве базиса суммы подпространств
можно взять, например, векторы![]() ,
,
дополненные вектором![]() .
.
В линейной независимости векторов![]() убедиться нетрудно.◄
убедиться нетрудно.◄
Алгоритм нахождения базиса системы векторов
Для того чтобы найти базис системы векторов Av А2. А , необходимо:
1) составить соответствующую системе векторов однородную систему уравнений
2) привести эту систему к равносильной разрешенной системе вида
- 3) записать базис системы векторов Б = (АрА2, . А ), включив в него векторы, соответствующие разрешенным неизвестным;
- 4) записать разложения векторов по базису; коэффициентами разложения вектора А. по этому базису являются координаты соответствующего вектора
в разрешенной системе уравнений, т.е.
Система векторов, состоящая из п векторов, ранг которой равен г, может иметь несколько базисов. Число возможных базисов системы векторов определяется как число меньшее или равное числу сочетаний из п по г.
Пример 3.3. Найти ранг и базис системы векторов
разложения векторов по базису, перейти к новому базису и найти число возможных базисов системы.
Решение. Составим систему уравнений A t ay + А2х2 + . + А„хп = 0, которая в координатной записи имеет вид
Приведение данной системы уравнений с помощью преобразований Жордана к равносильной разрешенной приведено в ниже следующей таблице.
Разрешенная система имеет вид
В базис системы векторов включаем 1-й и 2-й векторы Б: = (AVA2), которые соответствуют разрешенным неизвестным х1 и х2. Ранг системы векторов равен числу векторов, вошедших в базис, т.е. г = 2.
Запишем разложения векторов по базису. Коэффициентами разложения вектора А3 являются координаты вектора А’3 = (3, -2), т.е. коэффициенты при х3 в разрешенной системе уравнений (в последних трех строках таблицы), они образуют столбец, расположенный под х3 А3 = ЗЛ1 – 2Аг Аналогично, коэффициентами разложения вектора А4 являются координаты вектора А’4 = (4, 1) А4 = 4Ау + 1 Ат
Для нахождения нового базиса необходимо выбрать новый разрешающий элемент. Пусть этим элементом будет элемент я94 = 1.
Как найти базис данной системы векторов
Определение базиса.Система векторов образует базис, если:
1) она линейно-независима,
2) любой вектор пространства через нее линейно выражается.
Пример 1.Базис пространства : .
2. В системе векторов базисом являются векторы: , т.к. линейно выражается через векторы .
Замечание.Чтобы найти базис данной системы векторов необходимо:
1) записать координаты векторов в матрицу,
2) с помощью элементарных преобразований привести матрицу к треугольному виду,
3) ненулевые строки матрицы будут являться базисом системы,
4) количество векторов в базисе равно рангу матрицы.
Теорема Кронекера-Капелли
Теорема Кронеккера–Капелли дает исчерпывающий ответ на вопрос о совместности произвольной системы линейных уравнений с неизвестными
Теорема Кронеккера–Капелли. Система линейных алгебраических уравнений совместна тогда и только тогда, когда ранг расширенной матрицы системы равен рангу основной матрицы, .
Алгоритм отыскания всех решений совместной системы линейных уравнений вытекает из теоремы Кронеккера–Капелли и следующих теорем.
Теорема. Если ранг совместной системы равен числу неизвестных, то система имеет единственное решение.
Теорема. Если ранг совместной системы меньше числа неизвестных, то система имеет бесчисленное множество решений.
Алгоритм решения произвольной системы линейных уравнений:
1. Найдем ранги основной и расширенной матриц системы. Если они не равны ( ), то система несовместна (не имеет решений). Если ранги равны ( , то система совместна.
2. Для совместной системы найдем какой-нибудь минор, порядок которого определяет ранг матрицы (такой минор называют базисным). Составим новую систему из уравнений, в которых коэффициенты при неизвестных, входят в базисный минор (эти неизвестные называют главными неизвестными), остальные уравнения отбросим. Главные неизвестные с коэффициентами оставим слева, а остальные неизвестных (их называют свободными неизвестными) перенесем в правую часть уравнений.
3. Найдем выражения главных неизвестных через свободные. Получаем общее решение системы.
4. Придавая свободным неизвестным произвольные значения, получим соответствующие значения главных неизвестных. Таким образомнаходим частные решения исходной системы уравнений.
Линейное программирование. Основные понятия
Линейное программирование – это направление математического программирования, изучающее методы решения экстремальных задач, которые характеризуются линейной зависимостью между переменными и линейным критерием.
Необходимым условием постановки задачи линейного программирования являются ограничения на наличие ресурсов, величину спроса, производственную мощность предприятия и другие производственные факторы.
Сущность линейного программирования состоит в нахождении точек наибольшего или наименьшего значения некоторой функции при определенном наборе ограничений, налагаемых на аргументы и образующихсистему ограничений, которая имеет, как правило, бесконечное множество решений. Каждая совокупность значений переменных (аргументов функции F), которые удовлетворяют системе ограничений, называетсядопустимым планом задачи линейного программирования. Функция F, максимум или минимум которой определяется, называется целевой функцией задачи. Допустимый план, на котором достигается максимум или минимум функции F, называется оптимальным планом задачи.
Система ограничений, определяющая множество планов, диктуется условиями производства. Задачей линейного программирования (ЗЛП) является выбор из множества допустимых планов наиболее выгодного (оптимального).
В общей постановке задача линейного программирования выглядит следующим образом:
Имеются какие-то переменные х = (х1 , х2 , … хn ) и функция этих переменных f(x) = f (х1 , х2 , … хn ), которая носит название целевой функции. Ставится задача: найти экстремум (максимум или минимум) целевой функции f(x) при условии, что переменные x принадлежат некоторой области G:
В зависимости от вида функции f(x) и области G и различают разделы математического программирования: квадратичное программирование, выпуклое программирование, целочисленное программирование и т.д. Линейное программирование характеризуется тем, что
а) функция f(x) является линейной функцией переменных х1 , х2 , … хn
б) область G определяется системой линейных равенств или неравенств.
Математическая модель любой задачи линейного программирования включает в себя:
Векторное пространство: размерность и базис, разложение вектора по базису
В статье о n -мерных векторах мы пришли к понятию линейного пространства, порождаемого множеством n -мерных векторов. Теперь нам предстоит рассмотреть не менее важные понятия, такие как размерность и базис векторного пространства. Они напрямую связаны с понятием линейно независимой системы векторов, так что дополнительно рекомендуется напомнить себе основы и этой темы.
Введем некоторые определения.
Размерность векторного пространства – число, соответствующее максимальному количеству линейно независимых векторов в этом пространстве.
Базис векторного пространства – совокупность линейно независимых векторов, упорядоченная и в своей численности равная размерности пространства.
Рассмотрим некое пространство n -векторов. Размерность его соответственно равна n . Возьмем систему из n -единичных векторов:
e ( 1 ) = ( 1 , 0 , . . . , 0 ) e ( 2 ) = ( 0 , 1 , . . . , 0 ) e ( n ) = ( 0 , 0 , . . . , 1 )
Используем эти векторы в качестве составляющих матрицы A : она будет являться единичной с размерностью n на n . Ранг этой матрицы равен n . Следовательно, векторная система e ( 1 ) , e ( 2 ) , . . . , e ( n ) является линейно независимой. При этом к системе невозможно добавить ни одного вектора, не нарушив ее линейной независимости.
Так как число векторов в системе равно n , то размерность пространства n -мерных векторов равна n , а единичные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом указанного пространства.
Из полученного определения сделаем вывод: любая система n -мерных векторов, в которой число векторов меньше n , не является базисом пространства.
Если мы поменяем местами первый и второй вектор, получим систему векторов e ( 2 ) , e ( 1 ) , . . . , e ( n ) . Она также будет являться базисом n -мерного векторного пространства. Составим матрицу, взяв за ее строки векторы полученной системы. Матрица может быть получена из единичной матрицы перестановкой местами первых двух строк, ранг ее будет равен n . Система e ( 2 ) , e ( 1 ) , . . . , e ( n ) линейно независима и является базисом n -мерного векторного пространства.
Переставив местами в исходной системе другие векторы, получим еще один базис.
Мы можем взять линейно независимую систему неединичных векторов, и она также будет представлять собой базис n -мерного векторного пространства.
Векторное пространство с размерностью n имеет столько базисов, сколько существует линейно независимых систем из n -мерных векторов числом n.
Плоскость является двумерным пространством – ее базисом будут два любых неколлинеарных вектора. Базисом трехмерного пространства послужат три любых некомпланарных вектора.
Рассмотрим применение данной теории на конкретных примерах.
Исходные данные: векторы
a = ( 3 , – 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , – 1 , – 2 )
Необходимо определить, являются ли указанные векторы базисом трехмерного векторного пространства.
Решение
Для решения поставленной задачи исследуем заданную систему векторов на линейную зависимость. Составим матрицу, где строки – координаты векторов. Определим ранг матрицы.
A = 3 2 3 – 2 1 – 1 1 2 – 2 A = 3 – 2 1 2 1 2 3 – 1 – 2 = 3 · 1 · ( – 2 ) + ( – 2 ) · 2 · 3 + 1 · 2 · ( – 1 ) – 1 · 1 · 3 – ( – 2 ) · 2 · ( – 2 ) – 3 · 2 · ( – 1 ) = = – 25 ≠ 0 ⇒ R a n k ( A ) = 3
Следовательно, заданные условием задачи векторы линейно независимы, и их численность равна размерности векторного пространства – они являются базисом векторного пространства.
Ответ: указанные векторы являются базисом векторного пространства.
Исходные данные: векторы
a = ( 3 , – 2 , 1 ) b = ( 2 , 1 , 2 ) c = ( 3 , – 1 , – 2 ) d = ( 0 , 1 , 2 )
Необходимо определить, может ли указанная система векторов являться базисом трехмерного пространства.
Решение
Указанная в условии задачи система векторов является линейно зависимой, т.к. максимальное число линейно независимых векторов равно 3. Таким образом, указанная система векторов не может служить базисом трехмерного векторного пространства. Но стоит отметить, что подсистема исходной системы a = ( 3 , – 2 , 1 ) , b = ( 2 , 1 , 2 ) , c = ( 3 , – 1 , – 2 ) является базисом.
Ответ: указанная система векторов не является базисом.
Исходные данные: векторы
a = ( 1 , 2 , 3 , 3 ) b = ( 2 , 5 , 6 , 8 ) c = ( 1 , 3 , 2 , 4 ) d = ( 2 , 5 , 4 , 7 )
Могут ли они являться базисом четырехмерного пространства?
Решение
Cоставим матрицу, используя в качестве строк координаты заданных векторов
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
По методу Гаусса определим ранг матрицы:
A = 1 2 3 3 2 5 6 8 1 3 2 4 2 5 4 7
1 2 3 3 0 1 0 2 0 1 – 1 1 0 1 – 2 1
1 2 3 3 0 1 0 2 0 0 – 1 – 1 0 0 – 2 – 1
1 2 3 3 0 1 0 2 0 0 – 1 – 1 0 0 0 1 ⇒ ⇒ R a n k ( A ) = 4
Следовательно, система заданных векторов линейно независима и их численность равна размерности векторного пространства – они являются базисом четырехмерного векторного пространства.
Ответ: заданные векторы являются базисом четырехмерного пространства.
Исходные данные: векторы
a ( 1 ) = ( 1 , 2 , – 1 , – 2 ) a ( 2 ) = ( 0 , 2 , 1 , – 3 ) a ( 3 ) = ( 1 , 0 , 0 , 5 )
Составляют ли они базис пространства размерностью 4?
Решение
Исходная система векторов линейно независима, но численность векторов в ней недостаточна, чтобы стать базисом четырехмерного пространства.
Ответ: нет, не составляют.
Разложение вектора по базису
Примем, что произвольные векторы e ( 1 ) , e ( 2 ) , . . . , e ( n ) являются базисом векторного n-мерного пространства. Добавим к ним некий n -мерный вектор x → : полученная система векторов станет линейно зависимой. Свойства линейной зависимости гласят, что хотя бы один из векторов такой системы может линейно выражаться через остальные. Переформулируя это утверждение, можно говорить о том, что хотя бы один из векторов линейно зависимой системы может раскладываться по остальным векторам.
Таким образом, мы пришли к формулировке важнейшей теоремы:
Любой вектор n -мерного векторного пространства единственным образом раскладывается по базису.
Докажем эту теорему:
зададим базис n -мерного векторного пространства – e ( 1 ) , e ( 2 ) , . . . , e ( n ) . Сделаем систему линейно зависимой, добавив к ней n -мерный вектор x → . Этот вектор может быть линейно выражен через исходные векторы e :
x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) , где x 1 , x 2 , . . . , x n – некоторые числа.
Теперь докажем, что такое разложение является единственным. Предположим, что это не так и существует еще одно подобное разложение:
Отнимем от левой и правой частей этого равенства соответственно левую и правую части равенства x = x 1 · e ( 1 ) + x 2 · e ( 2 ) + . . . + x n · e ( n ) . Получим:
1 – x 1 ) · e ( 1 ) + ( x
2 – x 2 ) · e ( 2 ) + . . . ( x
Система базисных векторов e ( 1 ) , e ( 2 ) , . . . , e ( n ) линейно независима; по определению линейной независимости системы векторов равенство выше возможно только тогда, когда все коэффициенты ( x
2 – x 2 ) , . . . , ( x
n – x n ) будут равны нулю. Из чего справедливым будет: x 1 = x
n . И это доказывает единственный вариант разложения вектора по базису.
При этом коэффициенты x 1 , x 2 , . . . , x n называются координатами вектора x → в базисе e ( 1 ) , e ( 2 ) , . . . , e ( n ) .
Доказанная теория делает понятным выражение «задан n -мерный вектор x = ( x 1 , x 2 , . . . , x n ) »: рассматривается вектор x → n -мерного векторного пространства, и его координаты заданы в некотором базисе. При этом также понятно, что этот же вектор в другом базисе n -мерного пространства будет иметь другие координаты.
Рассмотрим следующий пример: допустим, что в некотором базисе n -мерного векторного пространства задана система из n линейно независимых векторов
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
а также задан вектор x = ( x 1 , x 2 , . . . , x n ) .
Векторы e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) в этом случае также являются базисом этого векторного пространства.
Предположим, что необходимо определить координаты вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) , обозначаемые как x
Вектор x → будет представлен следующим образом:
2 · e ( 2 ) + . . . + x
Запишем это выражение в координатной форме:
( x 1 , x 2 , . . . , x n ) = x
1 · ( e ( 1 ) 1 , e ( 1 ) 2 , . . . , e ( 1 ) n ) + x
2 · ( e ( 2 ) 1 , e ( 2 ) 2 , . . . , e ( 2 ) n ) + . . . + + x
n · ( e ( n ) 1 , e ( n ) 2 , . . . , e ( n ) n ) = = ( x
2 e 1 ( 2 ) + . . . + x
2 e 2 ( 2 ) + + . . . + x
n e 2 ( n ) , . . . , x
2 e n ( 2 ) + . . . + x
Полученное равенство равносильно системе из n линейных алгебраических выражений с n неизвестными линейными переменными x
n e 2 n ⋮ x n = x
Матрица этой системы будет иметь следующий вид:
e 1 ( 1 ) e 1 ( 2 ) ⋯ e 1 ( n ) e 2 ( 1 ) e 2 ( 2 ) ⋯ e 2 ( n ) ⋮ ⋮ ⋮ ⋮ e n ( 1 ) e n ( 2 ) ⋯ e n ( n )
Пусть это будет матрица A , и ее столбцы – векторы линейно независимой системы векторов e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) . Ранг матрицы – n , и ее определитель отличен от нуля. Это свидетельствует о том, что система уравнений имеет единственное решение, определяемое любым удобным способом: к примеру, методом Крамера или матричным методом. Таким образом мы сможем определить координаты x
n вектора x → в базисе e 1 ( 1 ) , e 2 ( 2 ) , . . . , e n ( n ) .
Применим рассмотренную теорию на конкретном примере.
Исходные данные: в базисе трехмерного пространства заданы векторы
e ( 1 ) = ( 1 , – 1 , 1 ) e ( 2 ) = ( 3 , 2 , – 5 ) e ( 3 ) = ( 2 , 1 , – 3 ) x = ( 6 , 2 , – 7 )
Необходимо подтвердить факт, что система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) также служит базисом заданного пространства, а также определить координаты вектора х в заданном базисе.
Решение
Система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) будет являться базисом трехмерного пространства, если она линейно независима. Выясним эту возможность, определив ранг матрицы A , строки которой – заданные векторы e ( 1 ) , e ( 2 ) , e ( 3 ) .
Используем метод Гаусса:
A = 1 – 1 1 3 2 – 5 2 1 – 3
1 – 1 1 0 5 – 8 0 3 – 5
1 – 1 1 0 5 – 8 0 0 – 1 5
R a n k ( A ) = 3 . Таким образом, система векторов e ( 1 ) , e ( 2 ) , e ( 3 ) линейно независима и является базисом.
Пусть в базисе вектор x → имеет координаты x
3 . Связь этих координат определяется уравнением:
3 e 1 ( 3 ) x 2 = x
3 e 2 ( 3 ) x 3 = x
Применим значения согласно условиям задачи:
Решим систему уравнений методом Крамера:
∆ = 1 3 2 – 1 2 1 1 – 5 – 3 = – 1 ∆ x
1 = 6 3 2 2 2 1 – 7 – 5 – 3 = – 1 , x
1 ∆ = – 1 – 1 = 1 ∆ x
2 = 1 6 2 – 1 2 1 1 – 7 – 3 = – 1 , x
2 ∆ = – 1 – 1 = 1 ∆ x
3 = 1 3 6 – 1 2 2 1 – 5 – 7 = – 1 , x
Так, вектор x → в базисе e ( 1 ) , e ( 2 ) , e ( 3 ) имеет координаты x
Ответ: x = ( 1 , 1 , 1 )
Связь между базисами
Предположим, что в некотором базисе n-мерного векторного пространства даны две линейно независимые системы векторов:
c ( 1 ) = ( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) c ( 2 ) = ( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) ⋮ c ( n ) = ( c 1 ( n ) , e 2 ( n ) , . . . , c n ( n ) )
e ( 1 ) = ( e 1 ( 1 ) , e 2 ( 1 ) , . . . , e n ( 1 ) ) e ( 2 ) = ( e 1 ( 2 ) , e 2 ( 2 ) , . . . , e n ( 2 ) ) ⋮ e ( n ) = ( e 1 ( n ) , e 2 ( n ) , . . . , e n ( n ) )
Указанные системы являются также базисами заданного пространства.
n ( 1 ) – координаты вектора c ( 1 ) в базисе e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) , тогда связь координат будет задаваться системой линейных уравнений:
1 ( 1 ) e 1 ( 1 ) + c
2 ( 1 ) e 1 ( 2 ) + . . . + c
n ( 1 ) e 1 ( n ) с 2 ( 1 ) = c
1 ( 1 ) e 2 ( 1 ) + c
2 ( 1 ) e 2 ( 2 ) + . . . + c
n ( 1 ) e 2 ( n ) ⋮ с n ( 1 ) = c
1 ( 1 ) e n ( 1 ) + c
2 ( 1 ) e n ( 2 ) + . . . + c
В виде матрицы систему можно отобразить так:
( c 1 ( 1 ) , c 2 ( 1 ) , . . . , c n ( 1 ) ) = ( c
n ( 1 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Сделаем по аналогии такую же запись для вектора c ( 2 ) :
( c 1 ( 2 ) , c 2 ( 2 ) , . . . , c n ( 2 ) ) = ( c
n ( 2 ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
И, далее действуя по тому же принципу, получаем:
( c 1 ( n ) , c 2 ( n ) , . . . , c n ( n ) ) = ( c
n ( n ) ) · e 1 ( 1 ) e 2 ( 1 ) … e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) … e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) … e n ( n )
Матричные равенства объединим в одно выражение:
c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n ) = c
n ( n ) · e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n )
Оно и будет определять связь векторов двух различных базисов.
Используя тот же принцип, возможно выразить все векторы базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) через базис c ( 1 ) , c ( 2 ) , . . . , c ( n ) :
e 1 ( 1 ) e 2 ( 1 ) ⋯ e n ( 1 ) e 1 ( 2 ) e 2 ( 2 ) ⋯ e n ( 2 ) ⋮ ⋮ ⋮ ⋮ e 1 ( n ) e 2 ( n ) ⋯ e n ( n ) = e
n ( n ) · c 1 ( 1 ) c 2 ( 1 ) ⋯ c n ( 1 ) c 1 ( 2 ) c 2 ( 2 ) ⋯ c n ( 2 ) ⋮ ⋮ ⋮ ⋮ c 1 ( n ) c 2 ( n ) ⋯ c n ( n )
Дадим следующие определения:
n ( n ) является матрицей перехода от базиса e ( 1 ) , e ( 2 ) , . . . , e ( 3 )
к базису c ( 1 ) , c ( 2 ) , . . . , c ( n ) .
n ( n ) является матрицей перехода от базиса c ( 1 ) , c ( 2 ) , . . . , c ( n )
к базису e ( 1 ) , e ( 2 ) , . . . , e ( 3 ) .
[spoiler title=”источники:”]
http://megaobuchalka.ru/10/21983.html
http://zaochnik.com/spravochnik/matematika/vektory/vektornoe-prostranstvo/
[/spoiler]
Как найти базис
Способ доказательства открывается непосредственно из определения базиса.Любая упорядоченная система n линейно независимых векторов пространства R^n называется базисом этого пространства.

Вам понадобится
- – бумага;
- – ручка.
Инструкция
Найдите какой-нибудь короткий признак линейной независимости.Теорема. Система из т векторов пространства R^n является линейно независимой тогда и только тогда, когда ранг матрицы, составленной из координат этих векторов равен т.
Доказательство. Используем определение линейной независимости, которое гласит, что образующие систему векторы линейно независимы (тогда и только тогда), если равенство нулю любой их линейной комбинации достижимо лишь при равенстве нулю всех коэффициентов этой комбинации.Далее см. рис. 1, где все написано наиболее подробно.На рис.1 в столбцах расположены наборы чисел xij, j=1, 2,…,n соответствующие вектору xi, i=1,…,m.
Выполните действия по правилам линейных операций в пространстве R^n. Так как каждый вектор в R^n однозначно определяется упорядоченным набором чисел, приравняйте «координаты» равных векторов и получите систему n линейных однородных алгебраических уравнений с n неизвестными a1, a2,…, am (см. рис.2).
Линейная независимость системы векторов (x1, x2,…, xm) в силу эквивалентных преобразований эквивалентна тому, что однородная система (рис. 2) имеет единственное нулевое решение. Совместная система тогда и только тогда имеет единственное решение, когда ранг матрицы (матрица системы составлена из координат векторов (x1, x2,…,xm) системы равен числу неизвестных, то есть n.Итак, для того чтобы обосновать тот факт, что векторы образуют базис, следует составить из их координат определитель и убедиться, что он не равен нулю.
Видео по теме
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
$begingroup$
Considering the following matrix $A=left[ begin{matrix} 1 & 1 & -1 \ -1 & 3 & -1 \ -1 & 1 & 1 end{matrix} right]$, which has an eigenvalue of $lambda=2$, I need to find a basis for the eigenspace corresponding to the given eigenvalue.
So, basically I did $ker(A-lambda I)=0$, which resulted in $ker(left[ begin{matrix} -1 & 1 & -1 end{matrix} right])$ after simplification.
That is equal to $-x_1+x_2-x_3=0$, but I’m stuck from there. How can I represent a basis for the matrix?
![]()
Bernard
173k10 gold badges66 silver badges166 bronze badges
asked Nov 2, 2018 at 14:10
![]()
$endgroup$
2
$begingroup$
The equation can be rewritten as $x_1=x_2-x_3$ and you can assign arbitrary values to $x_2$ and $x_3$, thus getting all solutions. In order to find two linearly independent solutions, choose first $x_2=1$ and $x_3=0$; then $x_2=0$ and $x_3$, getting the two vectors
$$
begin{bmatrix} 1 \ 1 \ 0 end{bmatrix}
qquad
begin{bmatrix} -1 \ 0 \ 1 end{bmatrix}
$$
These are obviously linearly independent, by just looking at the second and third row.
answered Nov 2, 2018 at 14:35
![]()
egregegreg
234k18 gold badges137 silver badges316 bronze badges
$endgroup$
$begingroup$
Since the solutions are defined by the equation $;x_3=x_2-x_1$, you have an isomorphism
begin{align}
mathbf R^2&longrightarrow ker(A-2I)\
(x_1,x_2)&longmapsto (x_1, x_2,x_2-x_1)
end{align}
Remember an isomorphism maps a basis of the domain onto a basis of the image.
answered Nov 2, 2018 at 14:22
![]()
BernardBernard
173k10 gold badges66 silver badges166 bronze badges
$endgroup$
You must log in to answer this question.
Not the answer you’re looking for? Browse other questions tagged
.
Not the answer you’re looking for? Browse other questions tagged
.
В статье о n-мерных векторах мы пришли к понятию линейного пространства, порождаемого множеством n-мерных векторов. Теперь нам предстоит рассмотреть не менее важные понятия, такие как размерность и базис векторного пространства. Они напрямую связаны с понятием линейно независимой системы векторов, так что дополнительно рекомендуется напомнить себе основы и этой темы.
Введем некоторые определения.
Размерность векторного пространства – число, соответствующее максимальному количеству линейно независимых векторов в этом пространстве.
Базис векторного пространства – совокупность линейно независимых векторов, упорядоченная и в своей численности равная размерности пространства.
Рассмотрим некое пространство n-векторов. Размерность его соответственно равна n. Возьмем систему из n-единичных векторов:
e(1)=(1, 0,…,0)e(2)=(0, 1,…,0)e(n)=(0, 0,…,1)
Используем эти векторы в качестве составляющих матрицы A: она будет являться единичной с размерностью n на n. Ранг этой матрицы равен n. Следовательно, векторная система e(1), e(2),…, e(n) является линейно независимой. При этом к системе невозможно добавить ни одного вектора, не нарушив ее линейной независимости.
Так как число векторов в системе равно n, то размерность пространства n-мерных векторов равна n, а единичные векторы e(1), e(2),…, e(n) являются базисом указанного пространства.
Из полученного определения сделаем вывод: любая система n-мерных векторов, в которой число векторов меньше n, не является базисом пространства.
Если мы поменяем местами первый и второй вектор, получим систему векторов e(2), e(1),…, e(n). Она также будет являться базисом n-мерного векторного пространства. Составим матрицу, взяв за ее строки векторы полученной системы. Матрица может быть получена из единичной матрицы перестановкой местами первых двух строк, ранг ее будет равен n. Система e(2), e(1),…, e(n) линейно независима и является базисом n-мерного векторного пространства.
Переставив местами в исходной системе другие векторы, получим еще один базис.
Мы можем взять линейно независимую систему неединичных векторов, и она также будет представлять собой базис n-мерного векторного пространства.
Векторное пространство с размерностью n имеет столько базисов, сколько существует линейно независимых систем из n-мерных векторов числом n.
Плоскость является двумерным пространством – ее базисом будут два любых неколлинеарных вектора. Базисом трехмерного пространства послужат три любых некомпланарных вектора.
Рассмотрим применение данной теории на конкретных примерах.
Исходные данные: векторы
a=(3, -2, 1)b=(2, 1, 2)c=(3, -1, -2)
Необходимо определить, являются ли указанные векторы базисом трехмерного векторного пространства.
Решение
Для решения поставленной задачи исследуем заданную систему векторов на линейную зависимость. Составим матрицу, где строки – координаты векторов. Определим ранг матрицы.
A=323-21-112-2A=3-212123-1-2=3·1·(-2)+(-2)·2·3+1·2·(-1)-1·1·3-(-2)·2·(-2)-3·2·(-1)==-25≠0⇒Rank(A)=3
Следовательно, заданные условием задачи векторы линейно независимы, и их численность равна размерности векторного пространства – они являются базисом векторного пространства.
Ответ: указанные векторы являются базисом векторного пространства.
Исходные данные: векторы
a=(3, -2, 1)b=(2, 1, 2)c=(3, -1, -2)d=(0, 1, 2)
Необходимо определить, может ли указанная система векторов являться базисом трехмерного пространства.
Решение
Указанная в условии задачи система векторов является линейно зависимой, т.к. максимальное число линейно независимых векторов равно 3. Таким образом, указанная система векторов не может служить базисом трехмерного векторного пространства. Но стоит отметить, что подсистема исходной системы a=(3, -2, 1), b=(2, 1, 2), c=(3, -1, -2) является базисом.
Ответ: указанная система векторов не является базисом.
Исходные данные: векторы
a=(1, 2, 3, 3)b=(2, 5, 6, 8)c=(1, 3, 2, 4)d=(2, 5, 4, 7)
Могут ли они являться базисом четырехмерного пространства?
Решение
Cоставим матрицу, используя в качестве строк координаты заданных векторов
A=1233256813242547
По методу Гаусса определим ранг матрицы:
A=1233256813242547~1233010201-1101-21~~1233010200-1-100-2-1~1233010200-1-10001⇒⇒Rank(A)=4
Следовательно, система заданных векторов линейно независима и их численность равна размерности векторного пространства – они являются базисом четырехмерного векторного пространства.
Ответ: заданные векторы являются базисом четырехмерного пространства.
Исходные данные: векторы
a(1)=(1, 2, -1, -2)a(2)=(0, 2, 1, -3)a(3)=(1, 0, 0, 5)
Составляют ли они базис пространства размерностью 4?
Решение
Исходная система векторов линейно независима, но численность векторов в ней недостаточна, чтобы стать базисом четырехмерного пространства.
Ответ: нет, не составляют.
Разложение вектора по базису
Примем, что произвольные векторы e(1), e(2),…, e(n) являются базисом векторного n-мерного пространства. Добавим к ним некий n-мерный вектор x→: полученная система векторов станет линейно зависимой. Свойства линейной зависимости гласят, что хотя бы один из векторов такой системы может линейно выражаться через остальные. Переформулируя это утверждение, можно говорить о том, что хотя бы один из векторов линейно зависимой системы может раскладываться по остальным векторам.
Таким образом, мы пришли к формулировке важнейшей теоремы:
Любой вектор n-мерного векторного пространства единственным образом раскладывается по базису.
Докажем эту теорему:
зададим базис n-мерного векторного пространства – e(1), e(2),…, e(n). Сделаем систему линейно зависимой, добавив к ней n-мерный вектор x→. Этот вектор может быть линейно выражен через исходные векторы e:
x=x1·e(1)+x2·e(2)+…+xn·e(n) , где x1, x2,…, xn – некоторые числа.
Теперь докажем, что такое разложение является единственным. Предположим, что это не так и существует еще одно подобное разложение:
x=x~1e(1)+x2~e(2)+…+x~ne(n), где x~1, x~2,…, x~n – некие числа.
Отнимем от левой и правой частей этого равенства соответственно левую и правую части равенства x=x1·e(1)+x2·e(2)+…+xn·e(n) . Получим:
0=(x~1-x1)·e(1)+(x~2-x2)·e(2)+…(x~n-xn)·e(2)
Система базисных векторов e(1), e(2),…, e(n) линейно независима; по определению линейной независимости системы векторов равенство выше возможно только тогда, когда все коэффициенты (x~1-x1), (x~2-x2),…, (x~n-xn) будут равны нулю. Из чего справедливым будет: x1=x~1, x2=x~2,…, xn=x~n. И это доказывает единственный вариант разложения вектора по базису.
При этом коэффициенты x1, x2,…, xn называются координатами вектора x→ в базисе e(1), e(2),…, e(n).
Доказанная теория делает понятным выражение «задан n-мерный вектор x=(x1, x2,…, xn)»: рассматривается вектор x→ n-мерного векторного пространства, и его координаты заданы в некотором базисе. При этом также понятно, что этот же вектор в другом базисе n-мерного пространства будет иметь другие координаты.
Рассмотрим следующий пример: допустим, что в некотором базисе n-мерного векторного пространства задана система из n линейно независимых векторов
e(1)=(e1(1), e2(1),…, en(1))e(2)=(e1(2), e2(2),…, en(2))⋮e(n)=(e1(n), e2(n),…, en(n))
а также задан вектор x=(x1, x2,…, xn).
Векторы e1(1), e2(2),…, en(n) в этом случае также являются базисом этого векторного пространства.
Предположим, что необходимо определить координаты вектора x→ в базисе e1(1), e2(2),…, en(n), обозначаемые как x~1, x~2,…, x~n.
Вектор x→ будет представлен следующим образом:
x=x~1·e(1)+x~2·e(2)+…+x~n·e(n)
Запишем это выражение в координатной форме:
(x1, x2,…, xn)=x~1·(e(1)1, e(1)2,…, e(1)n)+x~2·(e(2)1, e(2)2,…, e(2)n)+…++x~n·(e(n)1, e(n)2,…, e(n)n)==(x~1e1(1)+x~2e1(2)+…+x~ne1(n), x~1e2(1)+x~2e2(2)++…+x~ne2(n), …, x~1en(1)+x~2en(2)+…+x~nen(n))
Полученное равенство равносильно системе из n линейных алгебраических выражений с n неизвестными линейными переменными x~1, x~2,…, x~n:
x1=x~1e11+x~2e12+…+x~ne1nx2=x~1e21+x~2e22+…+x~ne2n⋮xn=x~1en1+x~2en2+…+x~nenn
Матрица этой системы будет иметь следующий вид:
e1(1)e1(2)⋯e1(n)e2(1)e2(2)⋯e2(n)⋮⋮⋮⋮en(1)en(2)⋯en(n)
Пусть это будет матрица A, и ее столбцы – векторы линейно независимой системы векторов e1(1), e2(2),…, en(n). Ранг матрицы – n, и ее определитель отличен от нуля. Это свидетельствует о том, что система уравнений имеет единственное решение, определяемое любым удобным способом: к примеру, методом Крамера или матричным методом. Таким образом мы сможем определить координаты x~1, x~2,…, x~n вектора x→ в базисе e1(1), e2(2),…, en(n).
Применим рассмотренную теорию на конкретном примере.
Исходные данные: в базисе трехмерного пространства заданы векторы
e(1)=(1,-1,1)e(2)=(3, 2, -5)e(3)=(2, 1, -3)x=(6, 2, -7)
Необходимо подтвердить факт, что система векторов e(1), e(2), e(3) также служит базисом заданного пространства, а также определить координаты вектора х в заданном базисе.
Решение
Система векторов e(1), e(2), e(3) будет являться базисом трехмерного пространства, если она линейно независима. Выясним эту возможность, определив ранг матрицы A, строки которой – заданные векторы e(1), e(2), e(3).
Используем метод Гаусса:
A=1-1132-521-3~1-1105-803-5~1-1105-800-15
Rank (A) = 3. Таким образом, система векторов e(1), e(2), e(3) линейно независима и является базисом.
Пусть в базисе вектор x→ имеет координаты x~1, x~2, x~3. Связь этих координат определяется уравнением:
x1=x~1e1(1)+x~2e1(2)+x~3e1(3)x2=x~1e2(1)+x~2e2(2)+x~3e2(3)x3=x~1e3(1)+x~2e3(2)+x~3e3(3)
Применим значения согласно условиям задачи:
x~1+3x~2+2x~3=6-x~1+2x~2+x~3=2x~1-5x~2-3×3=-7
Решим систему уравнений методом Крамера:
∆=132-1211-5-3=-1∆x~1=632221-7-5-3=-1, x~1=∆x~1∆=-1-1=1∆x~2=162-1211-7-3=-1, x~2=∆x~2∆=-1-1=1∆x~3=136-1221-5-7=-1, x~3=∆x~3∆=-1-1=1
Так, вектор x→ в базисе e(1), e(2), e(3) имеет координаты x~1=1, x~2=1, x~3=1.
Ответ: x=(1,1,1)
Связь между базисами
Предположим, что в некотором базисе n-мерного векторного пространства даны две линейно независимые системы векторов:
c(1)=(c1(1), c2(1),…, cn(1))c(2)=(c1(2), c2(2),…, cn(2))⋮c(n)=(c1(n), e2(n),…, cn(n))
И
e(1)=(e1(1), e2(1),…, en(1))e(2)=(e1(2), e2(2),…, en(2))⋮e(n)=(e1(n), e2(n),…, en(n))
Указанные системы являются также базисами заданного пространства.
Пусть c~1(1), c~2(1),…, c~n(1) – координаты вектора c(1) в базисе e(1), e(2),…, e(3), тогда связь координат будет задаваться системой линейных уравнений:
с1(1)=c~1(1)e1(1)+c~2(1)e1(2)+…+c~n(1)e1(n)с2(1)=c~1(1)e2(1)+c~2(1)e2(2)+…+c~n(1)e2(n)⋮ сn(1)=c~1(1)en(1)+c~2(1)en(2)+…+c~n(1)en(n)
В виде матрицы систему можно отобразить так:
(c1(1), c2(1),…, cn(1))=(c~1(1), c~2(1),…, c~n(1))·e1(1)e2(1)…en(1)e1(2)e2(2)…en(2)⋮⋮⋮⋮e1(n)e2(n)…en(n)
Сделаем по аналогии такую же запись для вектора c(2):
(c1(2), c2(2),…, cn(2))=(c~1(2), c~2(2),…, c~n(2))·e1(1)e2(1)…en(1)e1(2)e2(2)…en(2)⋮⋮⋮⋮e1(n)e2(n)…en(n)
И, далее действуя по тому же принципу, получаем:
(c1(n), c2(n),…, cn(n))=(c~1(n), c~2(n),…, c~n(n))·e1(1)e2(1)…en(1)e1(2)e2(2)…en(2)⋮⋮⋮⋮e1(n)e2(n)…en(n)
Матричные равенства объединим в одно выражение:
c1(1)c2(1)⋯cn(1)c1(2)c2(2)⋯cn(2)⋮⋮⋮⋮c1(n)c2(n)⋯cn(n)=c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n)·e1(1)e2(1)⋯en(1)e1(2)e2(2)⋯en(2)⋮⋮⋮⋮e1(n)e2(n)⋯en(n)
Оно и будет определять связь векторов двух различных базисов.
Используя тот же принцип, возможно выразить все векторы базиса e(1), e(2),…, e(3) через базис c(1), c(2),…, c(n):
e1(1)e2(1)⋯en(1)e1(2)e2(2)⋯en(2)⋮⋮⋮⋮e1(n)e2(n)⋯en(n)=e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n)·c1(1)c2(1)⋯cn(1)c1(2)c2(2)⋯cn(2)⋮⋮⋮⋮c1(n)c2(n)⋯cn(n)
Дадим следующие определения:
Матрица c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n) является матрицей перехода от базиса e(1), e(2),…, e(3)
к базису c(1), c(2),…, c(n).
Матрица e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n) является матрицей перехода от базиса c(1), c(2),…, c(n)
к базису e(1), e(2),…, e(3).
Из этих равенств очевидно, что
c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n)·e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n)=10⋯001⋯0⋮⋮⋮⋮00⋯1e~1(1)e~2(1)⋯e~n(1)e~1(2)e~2(2)⋯e~n(2)⋮⋮⋮⋮e~1(n)e~2(n)⋯e~n(n)·c~1(1)c~2(1)⋯c~n(1)c~1(2)c~2(2)⋯c~n(2)⋮⋮⋮⋮c~1(n)c~2(n)⋯c~n(n)=10⋯001⋯0⋮⋮⋮⋮00⋯1
т.е. матрицы перехода взаимообратны.
Рассмотрим теорию на конкретном примере.
Исходные данные: необходимо найти матрицу перехода от базиса
c(1)=(1, 2, 1)c(2)=(2, 3, 3)c(3)=(3, 7, 1)
к базису
e(1)=(3, 1, 4)e(2)=(5, 2, 1)e(3)=(1, 1, -6)
Также нужно указать связь координат произвольного вектора x→ в заданных базисах.
Решение
1. Пусть T – матрица перехода, тогда верным будет равенство:
314521111=T·121233371
Умножим обе части равенства на
121233371-1
и получим:
T=31452111-6·121233371-1
2. Определим матрицу перехода:
T=31452111-6·121233371-1==31452111-6·-18537-2-15-1-1=-2794-712012-4198
3. Определим связь координат вектора x→:
допустим, что в базисе c(1), c(2),…, c(n) вектор x→ имеет координаты x1,x2,x3, тогда:
x=(x1,x2,x3)·121233371,
а в базисе e(1), e(2),…, e(3) имеет координаты x~1,x~2,x~3, тогда:
x=(x~1,x~2,x~3)·31452111-6
Т.к. равны левые части этих равенств, мы можем приравнять и правые:
(x1,x2,x3)·121233371=(x~1,x~2,x~3)·31452111-6
Умножим обе части справа на
121233371-1
и получим:
(x1,x2,x3)=(x~1,x~2,x~3)·31452111-6·121233371-1⇔⇔(x1,x2,x3)=(x~1,x~2,x~3)·T⇔⇔(x1,x2,x3)=(x~1,x~2,x~3)·-2794-712012-4198
С другой стороны
(x~1,x~2,x~3)=(x1,x2,x3)·-2794-712012-4198
Последние равенства показывают связь координат вектора x→ в обоих базисах.
Ответ: матрица перехода
-2794-712012-4198
Координаты вектора x→ в заданных базисах связаны соотношением:
(x1,x2,x3)=(x~1,x~2,x~3)·-2794-712012-4198
или
(x~1,x~2,x~3)=(x1,x2,x3)·-2794-712012-4198-1
