Вычисление кинетического момента при различных движениях твердого тела
Будем
приближенно моделировать твердое тело
неизменяемой системой n
материальных
точек, распределенных по объёму тела.
1. Поступательное
движение твёрдого тела
Учитывая,
что при поступательном движении твёрдого
тела скорости всех его точек одинаковы
и вынося скорость
![]() за знак суммирования, получим
за знак суммирования, получим

Таким
образом,
![]() ,
,
гдеМ
— масса тела.
В полученной
формуле отсутствует знак суммирования,
и, следовательно, она справедлива и для
твердого тела с непрерывно распределенной
массой.
2. Вращательное
движение твёрдого тела вокруг неподвижной
оси
Кинетический
момент тела относительно оси вращения
z
равен
![]()
где
![]()
– расстояние от k-ой
точки до оси вращения,
![]() (
(![]() –
–
угловая скорость тела).
Следовательно,
![]() (13.11)
(13.11)
Вынося за знак
суммирования угловую скорость в равенстве
(13.11), получим
![]()
Следовательно,
![]() ,
,
где![]()
– момент инерции тела относительно оси
z.
Для твердого тела
с непрерывно распределенной массой
момент инерции будет представлять
соответствующий интеграл.
3. Плоскопараллельное
движение твёрдого тела
|
|
Из |

центра
масс так, как если бы в нём была
сосредоточена масса всего тела
относительно оси z
и кинетического момента тела в его
относительном вращательном движении
вокруг оси, проходящей через центр масс
тела
![]() :
:
![]()
 (13.12)
(13.12)
Теорема об изменении кинетического момента
|
Рис.13.7 |
Пусть |

Тогда
кинетический момент механической
системы относительно точки А
равен
![]() (13.13)
(13.13)
Продифференцируем
обе части равенства (13.13) по времени,
получим
![]() (13.14)
(13.14)
где
![]() –
–
ускорения точек относительно инерциальной
системы отсчёта, вызванные действием
равнодействующих внешних сил![]() и равнодействующих внутренних сил
и равнодействующих внутренних сил![]() и, следовательно
и, следовательно
![]()
![]() +
+![]()
Тогда
![]() (13.15)
(13.15)
В
равенстве (13.15)
![]() .
.
Обозначая
главный момент внешних сил относительно
точки А
–
![]() и учитывая, что главный момент внутренних
и учитывая, что главный момент внутренних
сил механической системы относительно
точки равен нулю, получим

Таким образом
![]() (13.16)
(13.16)
где
М
– масса всей системы,
![]() –
–
скорость центра масс.
Равенство
(13.16) выражает теорему об изменении
кинетического момента относительно
подвижной точки: производная
по времени от кинетического момента
для произвольной подвижной точки равна
сумме главного момента внешних сил
системы относительно той же точки и
векторного
произведения
количества движения системы на скорость
этой точки.
Теорема
чаще применяется для неподвижной точки
(VO
= 0):
![]() (13.17)
(13.17)
Производная по
времени от кинетического момента
механической системы относительно
неподвижной точки равна главному моменту
внешних сил относительно той же точки.
В
проекциях на оси х,
у,
z
получим три скалярных равенства:
![]() (13.18)
(13.18)
Если
в равенстве (13.16) за точку А
принять подвижный центр масс, теорема
будет иметь вид:
![]()
Следовательно,
теорема об изменении кинетического
момента механической системы для
неподвижного центра O
и для центра масс С
имеют
одинаковый вид.
Следствия
из теоремы об изменении кинетического
момента механической системы для
неподвижной точки
1.
Внутренние силы непосредственно не
влияют на изменение кинетического
момента.
2.
Если главный момент внешних сил
относительно некоторой неподвижной
точки равен нулю, то кинетический момент
системы относительно того же центра не
изменяется по модулю и направлению.
Если
![]() ,
,
то
![]()
и, следовательно, ![]() .
.
3.
Если главный момент внешних сил
относительно некоторой неподвижной
оси равен нулю, то кинетический момент
механической системы относительно этой
оси не изменяется по величине.
Если
![]() ,
,
то
![]()
и, следовательно, ![]() .
.
Пример
1. Скамейка Жуковского.
Круглая горизонтальная платформа может
вращаться с пренебрежимо малым трением
вокруг вертикальной оси. В первоначальный
момент на платформе стоит человек с
гантелями в опущенных руках. Платформу
раскрутили. Как изменится её угловая
скорость, если стоящий на ней человек
расставит руки с гантелями на уровне
плеч?
Решение.
Внешними силами механической системы,
состоящей из платформы с человеком,
будут силы тяжести платформы, человека
с гантелями и реакции опор о поверхность
параллельные оси вращения платформы.
Следовательно,
![]() .
.
Тогда из третьего следствия теоремы об
изменении кинетического момента
механической системы
![]() и, следовательно,
и, следовательно,
![]() (13.19)
(13.19)
где
![]() – момент инерции механической системы
– момент инерции механической системы
в первый момент при опущенных руках с
гантелями,1
– угловая скорость в этот момент времени,
![]() – момент инерции механической системы
– момент инерции механической системы
при расставленных руках,2
– соответствующая
угловая скорость системы. При этом
![]() ,
,
так как во втором случае будут больше
расстояния от гантелей до оси вращения
платформы с человеком.
Тогда
из равенства (13.19) угловая скорость при
расставленных руках уменьшится 2
< 1.![]()
Пример
2. Управление вращением платформы с
помощью маховика.
Механическая система состоит из
горизонтальной платформы, которая может
вращаться с пренебрежимо малым трением
вокруг вертикальной оси z
и маховика, ось которого совпадает с
осью вращения платформы. Маховик
раскрутили (за счёт внутренних сил) до
угловой скорости
из состояния покоя. Определить угловую
скорость
платформы.
Решение.
Как и в первом примере, внешние силы
(силы тяжести платформы и маховика,
реакции опор платформы о поверхность)
параллельны оси вращения z
и, следовательно,
![]() .
.
Из третьего следствия теоремы об
изменении кинетического момента
механической системы
![]() .
.
Пусть
![]() –
–
момент инерции маховика,![]() –
–
момент инерции платформы относительно
оси вращения. Кинетический момент
маховика относительно оси вращения
равен![]() если предположить, что платформа будет
если предположить, что платформа будет
вращаться в ту же сторону, что и маховик.
Кинетический момент платформы относительно
оси вращения равен
![]()
Тогда,
учитывая, что механическая система
вращается из состояния покоя, получаем
![]() .
.
Откуда
 .
.
Знак (-) означает,
что платформа будет вращаться в сторону,
противоположную вращению маховика.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
Кинетический момент точки и системы:
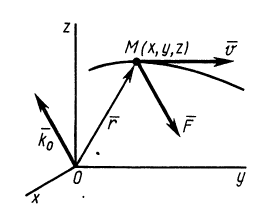
Рис. 47
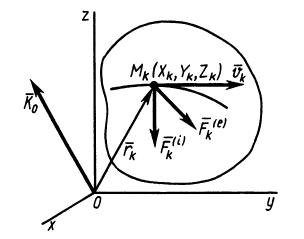
Рис. 48
Наряду с количеством движения в качестве векторной меры движения можно использовать кинетический момент, или момент количества движения. Для материальной точки массой  , движущейся со скоростью
, движущейся со скоростью  , кинетическим моментом
, кинетическим моментом  относительно какого-либо центра
относительно какого-либо центра  (рис. 47), т. е.
(рис. 47), т. е.

Кинетический момент  приложен к точке
приложен к точке  , относительно которой он вычисляется.
, относительно которой он вычисляется.
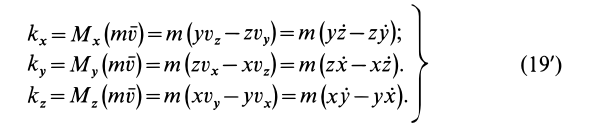
Проецируя обе части (19) на прямоугольные декартовы оси, получаем кинетические моменты точки относительно этих осей координат, если точка  является началом осей координат:
является началом осей координат:
В физике кинетический момент точки иногда называют моментом импульса точки.
Единица кинетического момента в СИ —  , или
, или  .
.
Для механической системы кинетическим моментом  (или главным моментом количества движения системы относительно какой-либо точки
(или главным моментом количества движения системы относительно какой-либо точки  ) называют векторную сумму кинетических моментов точек этой системы, взятых относительно точки
) называют векторную сумму кинетических моментов точек этой системы, взятых относительно точки  (рис. 48), т. е.
(рис. 48), т. е.

Кинетический момент системы приложен к точке  , относительно которой он вычисляется.
, относительно которой он вычисляется.
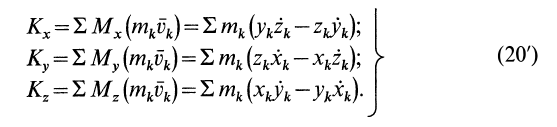
Если спроецировать (20) на прямоугольные декартовы оси координат, то получим проекции кинетического момента на эти оси, или кинетические моменты относительно осей координат:
Кинетический момент относительно оси вращения при вращательном движении твердого тела
Вычислим кинетический момент твердого тела относительно оси вращения, когда тело вращается вокруг этой неподвижной оси с угловой скоростью  (рис. 49). По определению кинетического момента относительно оси [(см. формулы (20′)] имеем
(рис. 49). По определению кинетического момента относительно оси [(см. формулы (20′)] имеем

Но при вращении тела вокруг оси  , причем количество движения точки
, причем количество движения точки  перпендикулярно отрезку
перпендикулярно отрезку  и лежит в плоскости, перпендикулярной оси вращения
и лежит в плоскости, перпендикулярной оси вращения  . Следовательно, момент количества движения относительно оси
. Следовательно, момент количества движения относительно оси  для одной точки
для одной точки

Для всего тела

т. е.

Таким образом, кинетический момент тела относительно оси вращения при вращательном движении равен произведению угловой скорости тела на его момент инерции относительно оси вращения. Знак кинетического момента относительно оси совпадает со знаком угловой скорости вращения вокруг этой оси: при вращении против часовой стрелки кинетический момент положительный; при вращении по часовой стрелке — отрицательный.
Дополнительно без вывода приведем формулы для кинетических моментов относительно двух других осей координат  и
и  , перпендикулярных оси вращения
, перпендикулярных оси вращения  . Имеем
. Имеем

где  и
и  — центробежные моменты инерции.
— центробежные моменты инерции.
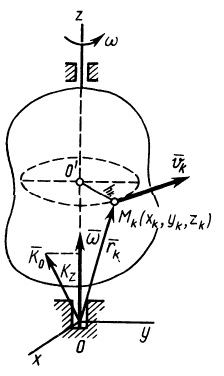
Рис. 49
Эти формулы можно получить как частный случай более общих формул для случая вращения твердого тела вокруг неподвижной точки. Они могут быть получены и непосредственно.
Если ось вращения  является главной осью инерции для точки
является главной осью инерции для точки  , то
, то  и, следовательно
и, следовательно  для этой точки. В этом случае кинетический момент
для этой точки. В этом случае кинетический момент  относительно точки
относительно точки  направлен по оси вращения. В общем случае
направлен по оси вращения. В общем случае  не направлен по оси вращения, так как имеет не равные нулю проекции
не направлен по оси вращения, так как имеет не равные нулю проекции  и
и  на оси координат, перпендикулярные оси вращения .
на оси координат, перпендикулярные оси вращения .
Теорема об изменении кинетического момента точки
Для материальной точки основной закон динамики можно представить в виде
Умножая обе части этого соотношения слева векторно на радиус-вектор  (см. рис. 48), получаем
(см. рис. 48), получаем

В правой части этой формулы имеем момент силы относительно неподвижной точки  . Преобразуем левую часть, применив формулу производной от векторного произведения:
. Преобразуем левую часть, применив формулу производной от векторного произведения:

Но
как векторное произведение параллельных векторов.
После этого из (22) получаем
или

Таким образом, первая производная по времени от кинетического момента точки относительно какого-либо центра равна моменту силы относительно того же центра.
Это и есть теорема об изменении кинетического момента для точки.
Проецируя (23) на прямоугольные декартовы оси координат, получаем теоремы об изменении кинетического момента точки относительно этих осей координат:

Теорема об изменении кинетического момента системы
Если к точкам системы приложить все внешние и внутренние силы (рис. 48), то для каждой точки системы можно выразить теорему об изменении кинетического момента в форме (23), т. е.

Суммируя правые и левые части этих соотношений по всем точкам системы и заменяя суммы производных производной от суммы, получаем

Так как, по свойству внутренних сил,

а по определению кинетического момента системы,

то

Если обозначить главный момент всех внешних сил  , т. е.
, т. е.

то теорему об изменении кинетического момента системы можно представить в виде

Следовательно, первая производная по времени от кинетического момента системы относительно какой-либо точки равна векторной сумме моментов внешних сил, действующих на систему, относительно той же точки.
В эту теорему входит кинетический момент системы в ее движении относительно инерциальной системы отсчета, причем кинетический момент и моменты внешних сил вычисляются относительно неподвижной в этой системе отсчета точки . Получим теорему об изменении кинетического момента системы такого же движения, но выберем в качестве точки при вычислении кинетического момента и моментов внешних сил точку  , движущуюся относительно инерциальной системы отсчета со скоростью
, движущуюся относительно инерциальной системы отсчета со скоростью  .
.
По определению кинетического момента системы относительно точки  имеем (рис. 50)
имеем (рис. 50)

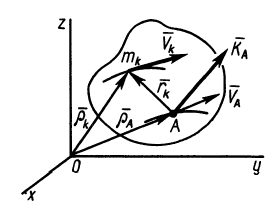
Рис. 50
Вычислим производную по времени от кинетического момента  по правилу дифференцирования векторных произведений. Получим
по правилу дифференцирования векторных произведений. Получим

так как 

Учитывая, что  , получим
, получим

или

Рассмотрим частные случаи этой теоремы.
1. Если точка  совпадает с центром масс
совпадает с центром масс  , то
, то  и теорема принимает форму
и теорема принимает форму
2. Если в случае плоского движения твердого тела выбрать в качестве точки  мгновенный центр скоростей
мгновенный центр скоростей  , то
, то  , так как в рассматриваемом случае
, так как в рассматриваемом случае  есть скорость движения мгновенного центра скоростей по неподвижной центроиде, а она не равна нулю в отличие от скорости точки тела, совпадающей с точкой , которая равна нулю. Очевидно,
есть скорость движения мгновенного центра скоростей по неподвижной центроиде, а она не равна нулю в отличие от скорости точки тела, совпадающей с точкой , которая равна нулю. Очевидно,  , если параллельна
, если параллельна  , т.е. если касательные к центроидам и траектории центра масс параллельны или, что то же самое, центр масс находится на нормали к центроидам в точке . Тогда
, т.е. если касательные к центроидам и траектории центра масс параллельны или, что то же самое, центр масс находится на нормали к центроидам в точке . Тогда
Эти частные случаи показывают, что для подвижных точек центра масс для любой системы и мгновенного центра скоростей при плоском движении твердого тела в рассмотренном случае теорема об изменении кинетического момента для абсолютного движения имеет ту же форму, что и для неподвижной точки  .
.
Внутренние силы непосредственно не влияют на изменение кинетического момента системы. Они могут влиять на него только через внешние силы, т. е. неявно.
Проецируя (24) на прямоугольные декартовы оси координат, получаем теоремы об изменении кинетического момента системы относительно этих осей координат, т. е.

Теорема об изменении кинетического момента позволяет изучать вращательное движение твердого тела вокруг оси и точки или вращательную часть движения тела в общем случае движения свободного твердого тела.
Законы сохранения кинетических моментов
Выведем законы сохранения кинетических моментов для системы, рассматривая материальную точку как механическую систему, у которой число точек равно единице. Естественно, что для одной материальной точки все действующие на нее силы являются внешними. Возможны следующие частные случаи теоремы об изменении кинетического момента системы.
1. Если главный момент внешних сил системы относительно точки  равен нулю, т. е.
равен нулю, т. е.  , то, согласно (24), кинетический момент системы
, то, согласно (24), кинетический момент системы  относительно той же точки постоянен по модулю и направлению, т. е.
относительно той же точки постоянен по модулю и направлению, т. е.

Этот частный случай теоремы об изменении кинетического момента системы называют законом сохранения кинетического момента. В проекциях на прямоугольные декартовы оси координат по этому закону

где  — постоянные величины.
— постоянные величины.
Соотношения (25′) являются первыми интегралами дифференциальных уравнений движения системы (3). Закон сохранения кинетического момента системы показывает, что одни внутренние силы не могут изменить кинетический момент системы, так же как они не изменяют ее количество движения.
2. Если сумма моментов всех внешних сил системы относительно оси  равна нулю, т. е.
равна нулю, т. е.  , то из (24′) следует, что
, то из (24′) следует, что

Следовательно, кинетический момент системы относительно какой-либо координатной оси постоянен, если сумма моментов внешних сил относительно этой оси равна нулю, что, в частности, наблюдается, когда внешние силы параллельны оси или пересекают ее. В частном случае для тела или системы тел, которые все вместе могут вращаться вокруг неподвижной оси, и если при этом

то

или

где  и
и  — момент инерции системы тел и их угловая скорость относительно оси вращения в произвольный момент времени
— момент инерции системы тел и их угловая скорость относительно оси вращения в произвольный момент времени  ;
;  и
и  — момент инерции тел и их угловая скорость в момент времени, выбранный за начальный, например при
— момент инерции тел и их угловая скорость в момент времени, выбранный за начальный, например при  .
.
Закон сохранения кинетического момента в форме (27) используют в своей деятельности акробаты, прыгуны, танцоры и т. д. Наглядно его можно продемонстрировать в опыте на скамье Жуковского (рис. 51). Если человек с гирями в руках встанет на горизонтальную платформу скамьи Жуковского, которая может вращаться вокруг вертикальной оси почти без трения, и затем ему сообщить угловую скорость вокруг этой оси, то
так как внешние силы или параллельны оси вращения (силы веса человека, гирь и платформы), или пересекают ось (реакции подшипника, если пренебречь силами трения).
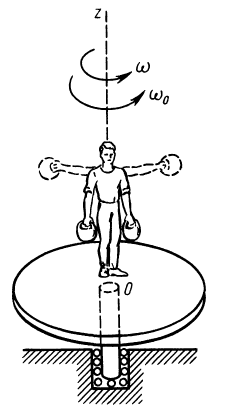
Рис. 51
Следовательно, если человек увеличит момент инерции, например разведением рук с гирями в сторону, то угловая скорость вращения уменьшится, и наоборот. В действительности угловая скорость хотя и медленно, но все время уменьшается вследствие наличия сопротивления воздуха и трения в подшипнике скамьи.
Пример:
Однородный горизонтальный диск радиусом  и силой тяжести
и силой тяжести  может вращаться без трения вокруг вертикальной оси. Как изменится угловая скорость диска, если первоначально стоящий на диске на расстоянии
может вращаться без трения вокруг вертикальной оси. Как изменится угловая скорость диска, если первоначально стоящий на диске на расстоянии  от его оси человек с силой тяжести
от его оси человек с силой тяжести  пойдет по окружности радиусом
пойдет по окружности радиусом  по диску с относительной скоростью
по диску с относительной скоростью  (рис. 52)?
(рис. 52)?
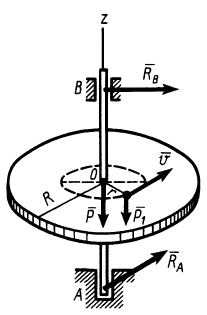
Рис. 52
Решение:
Пусть угловая скорость диска вначале была  , а потом вследствие движения человека по диску стала
, а потом вследствие движения человека по диску стала  . Так как внешние силы для системы, состоящей из человека и диска, параллельны оси
. Так как внешние силы для системы, состоящей из человека и диска, параллельны оси  (силы тяжести
(силы тяжести  и
и  ) или ее пересекают (реакции
) или ее пересекают (реакции  и
и  ), то
), то
и, следовательно,
Составим  для двух моментов времени и приравняем друг другу. В начальный момент, когда человек стоит, кинетический момент системы определяется как
для двух моментов времени и приравняем друг другу. В начальный момент, когда человек стоит, кинетический момент системы определяется как
После того как человек пойдет по диску, его кинетический момент станет равным кинетическому моменту от вращения вместе с диском плюс кинетический момент от относительного движения по диску, если человек идет в сторону вращения диска, т. е.
Приравнивая полученные выражения кинетических моментов, получаем

Отсюда
Для однородного диска
Поэтому угловая скорость
Угловая скорость диска от движения по нему человека уменьшилась на  . Если вместо диска рассматривать земной шар, то движение по нему материальных объектов (воздуха, течения воды и т. д.), которые имеют не равную нулю проекцию скорости на касательную к параллелям, вызовет изменение угловой скорости вращения Земли. Она уменьшится, если проекции скорости положительны для направления по вращению земного шара, и увеличится, если против вращения.
. Если вместо диска рассматривать земной шар, то движение по нему материальных объектов (воздуха, течения воды и т. д.), которые имеют не равную нулю проекцию скорости на касательную к параллелям, вызовет изменение угловой скорости вращения Земли. Она уменьшится, если проекции скорости положительны для направления по вращению земного шара, и увеличится, если против вращения.
Дифференциальное уравнение вращения твердого тела вокруг неподвижной оси
Из теоремы об изменении кинетического момента (24′) получим дифференциальное уравнение вращения твердого тела вокруг неподвижной оси  (рис. 53). Имеем
(рис. 53). Имеем

Для случая вращения твердого тела вокруг неподвижной оси, согласно (21), имеем

где  — постоянный для твердого тела момент инерции относительно неподвижной оси вращения;
— постоянный для твердого тела момент инерции относительно неподвижной оси вращения;  — угловая скорость. Учитывая это, получаем
— угловая скорость. Учитывая это, получаем
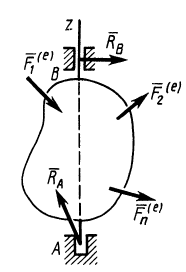
Рис. 53
Если ввести угол поворота тела  , учитывая, что
, учитывая, что  , имеем
, имеем
Это и есть дифференциальное уравнение вращения твердого тела вокруг неподвижной оси. Оно полностью аналогично дифференциальному уравнению поступательного движения твердого тела в проекции на какую-либо ось, например на ось  .
.
В дифференциальное уравнение вращения тела вокруг неподвижной оси вместо координаты  входит угол поворота
входит угол поворота  , вместо массы тела
, вместо массы тела  —момент инерции относительно оси вращения
—момент инерции относительно оси вращения  , вместо суммы проекций внешних сил на ось — сумма моментов внешних сил относительно оси вращения
, вместо суммы проекций внешних сил на ось — сумма моментов внешних сил относительно оси вращения  или так называемый вращательный момент внешних сил.
или так называемый вращательный момент внешних сил.
Реакции подшипников  и
и  оси вращения являются внешними силами, но их моменты относительно оси вращения равны нулю, так как они пересекают ось, если пренебречь силами трения.
оси вращения являются внешними силами, но их моменты относительно оси вращения равны нулю, так как они пересекают ось, если пренебречь силами трения.
В частном случае, когда

т. е. вращение тела происходит с постоянным угловым ускорением.
Если

то

Это случай равномерного вращения тела по инерции без действия вращательного момента внешних сил.
Дифференциальное уравнение вращательного движения твердого тела в общем случае позволяет решать две основные задачи: по заданному вращению тела определять вращающий момент внешних сил и по заданному вращательному моменту и начальным условиям находить вращение тела. При решении второй задачи для нахождения угла поворота как функции времени приходится интегрировать дифференциальное уравнение вращательного движения. Методы его интегрирования полностью аналогичны рассмотренным выше методам интегрирования дифференциального уравнения прямолинейного движения точки.
Движение точки под действием центральной силы
Теорема площадей:
Наряду с введенными в кинематике точки скоростью  и ускорением
и ускорением  можно ввести другие характеристики движения точки, например секторные скорость и ускорение. Секторной скоростью точки
можно ввести другие характеристики движения точки, например секторные скорость и ускорение. Секторной скоростью точки  или
или  относительно точки
относительно точки  (рис. 54) называют векторную величину, определяемую по формуле
(рис. 54) называют векторную величину, определяемую по формуле

где  — вектор, численно равный заштрихованной на рисунке площади, ометаемой радиусом-вектором
— вектор, численно равный заштрихованной на рисунке площади, ометаемой радиусом-вектором  движущейся точки за время
движущейся точки за время  ; направление вектора берется по перпендикуляру к заштрихованной площади так, чтобы с конца этого вектора при ометании заштрихованной площади видеть поворот радиуса-вектора против часовой стрелки.
; направление вектора берется по перпендикуляру к заштрихованной площади так, чтобы с конца этого вектора при ометании заштрихованной площади видеть поворот радиуса-вектора против часовой стрелки.
Для случая движения точки по плоскости секторная скорость перпендикулярна этой плоскости, если точка  выбрана в той же плоскости, в которой движется точка. Секторная скорость всегда приложена в той точке, относительно которой она вычисляется.
выбрана в той же плоскости, в которой движется точка. Секторная скорость всегда приложена в той точке, относительно которой она вычисляется.
Секторное ускорение  можно ввести как производную по времени от вектора секторной скорости, т. е.
можно ввести как производную по времени от вектора секторной скорости, т. е.

Секторную скорость можно выразить через момент линейной скорости  относительно точки :
относительно точки :

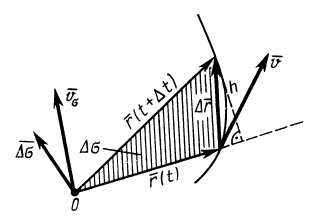
Рис. 54
Векторное произведение  , согласно определению, имеет такое же направление, как и
, согласно определению, имеет такое же направление, как и  . Следовательно, для доказательства формулы (29) достаточно показать, что величины левой и правой частей одинаковы. Вычислим левую часть формулы (29):
. Следовательно, для доказательства формулы (29) достаточно показать, что величины левой и правой частей одинаковы. Вычислим левую часть формулы (29):
но

Следовательно,

что совпадает с модулем векторного произведения, стоящим справа в формуле (29).
Если движение точки происходит в плоскости, то секторную скорость можно считать алгебраической величиной. В этом случае секторную скорость точки часто выражают в полярных координатах. Из формулы (29) секторная скорость

Но из кинематики точки в полярной системе координат на плоскости известно (рис. 55), что  .
.
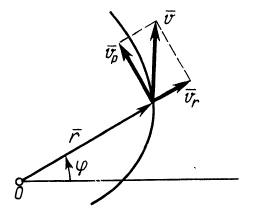
Рис. 55
Следовательно,

Формула (30) выражает секторную скорость в полярных координатах в случае плоского движения точки.
Используя формулу (29), кинетический момент через секторную скорость можно выразить в виде

Соответственно теорему об изменении кинетического момента (23) для точки можно выразить через секторную скорость формулой

В форме (32) теорему об изменении кинетического момента для точки называют теоремой площадей.
Движение точки под действием центральной силы
Центральной силой  называют такую силу, линия действия которой при движении точки ее приложения проходит через одну и ту же точку
называют такую силу, линия действия которой при движении точки ее приложения проходит через одну и ту же точку  , называемую центром центральной силы.
, называемую центром центральной силы.
Центральная сила может быть притягивающей (направленной к центру) и отталкивающей (направленной от центра). Так как для центральной силы _момент силы относительно своего центра равен нулю, т. е.  , то, следовательно, по теореме об изменении кинетического момента для точки (23),
, то, следовательно, по теореме об изменении кинетического момента для точки (23),

В проекциях на прямоугольные оси декартовой системы с началом в точке  по (33) имеем:
по (33) имеем:

где  — постоянные величины.
— постоянные величины.
Умножая первое соотношение (33′) на  , второе — на
, второе — на  , третье — на
, третье — на  и складывая, получаем
и складывая, получаем  , т.е. координаты движущейся точки
, т.е. координаты движущейся точки  удовлетворяют уравнению плоскости, проходящей через начало координат.
удовлетворяют уравнению плоскости, проходящей через начало координат.
Следовательно, траектория точки, движущейся под действием центральной силы, является плоской кривой, лежащей в плоскости, проходящей через центр силы.
Так как при движении точки под действием центральной силы
то, учитывая формулу (31), имеем

и, следовательно,

или
Формула (34) выражает так называемый интеграл площадей: при движении точки под действием центральной силы секторная скорость является постоянной величиной и, следовательно, ометаемая радиусом-вектором площадь пропорциональна времени.
Учитывая формулу (30), интеграл площадей (34) в полярных координатах можно представить в виде

В этой форме интеграл площадей широко используется при рассмотрении движения планет вокруг Солнца и вообще различных спутников, в частности искусственных спутников Земли.
Теорема об изменении кинетического момента системы в относительном движении по отношению к центру масс
Рассмотрим относительное движение системы только относительно системы координат, движущейся поступательно вместе с центром масс системы.
Прежде чем рассмотреть теорему, выведем формулу для вычисления кинетического момента системы.
Формула для кинетического момента системы
Пусть механическая система совершает движение относительно основной системы координат  . Возьмем подвижную систему координат
. Возьмем подвижную систему координат  с началом в центре масс системы
с началом в центре масс системы  , движущуюся поступательно относительно основной системы координат. Из рис. 56 следует, что для любого момента времени
, движущуюся поступательно относительно основной системы координат. Из рис. 56 следует, что для любого момента времени  .
.
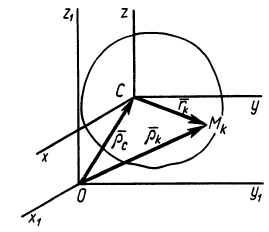
Рис. 56
Дифференцируя это тождество по времени, получаем
или
где  — абсолютная скорость точки
— абсолютная скорость точки  ,
,  — абсолютная скорость центра масс;
— абсолютная скорость центра масс;  — относительная скорость точки
— относительная скорость точки  относительно подвижной системы координат . При поступательном движении подвижной системы координат ее угловая скорость
относительно подвижной системы координат . При поступательном движении подвижной системы координат ее угловая скорость  равна нулю и по формуле Бура полная производная по времени от радиуса-вектора
равна нулю и по формуле Бура полная производная по времени от радиуса-вектора  совпадает с локальной производной, равной относительной скорости.
совпадает с локальной производной, равной относительной скорости.
Согласно определению кинетического момента  относительно неподвижной точки
относительно неподвижной точки  , для абсолютного движения системы относительно системы координат
, для абсолютного движения системы относительно системы координат  по формуле (20) имеем
по формуле (20) имеем

Подставляя в эту формулу значения  и
и  , после небольших преобразований получаем
, после небольших преобразований получаем

В этой формуле  — масса системы. Кроме того, последние два слагаемых равны нулю. Действительно, по определению радиуса-вектора центра масс относительно этого центра масс имеем
— масса системы. Кроме того, последние два слагаемых равны нулю. Действительно, по определению радиуса-вектора центра масс относительно этого центра масс имеем

Следовательно,  и последнее слагаемое в (36) тоже равно нулю.
и последнее слагаемое в (36) тоже равно нулю.
Другое слагаемое можно предварительно преобразовать:

Это слагаемое также равно нулю, так как все время  . Формула (36) принимает следующий окончательный вид:
. Формула (36) принимает следующий окончательный вид:

где  .
.
Величина  является кинетическим моментом системы относительно центра масс для относительного движения относительно системы координат, движущейся поступательно вместе с центром масс, т. е. системы координат
является кинетическим моментом системы относительно центра масс для относительного движения относительно системы координат, движущейся поступательно вместе с центром масс, т. е. системы координат  .
.
Формула (37) показывает, что кинетический момент абсолютного движения системы относительно неподвижной точки  равен векторной сумме кинетического момента центра масс относительно той же точки, если бы в центре масс была сосредоточена вся масса системы, и кинетического момента системы относительно центра масс для относительного движения системы по отношению к подвижной системе координат, движущейся поступательно вместе с центром масс.
равен векторной сумме кинетического момента центра масс относительно той же точки, если бы в центре масс была сосредоточена вся масса системы, и кинетического момента системы относительно центра масс для относительного движения системы по отношению к подвижной системе координат, движущейся поступательно вместе с центром масс.
Теорема об изменении кинетического момента системы в относительном движении по отношению к центру масс. Для абсолютного движения системы и неподвижной точки  теорема об изменении кинетического момента имеет вид
теорема об изменении кинетического момента имеет вид
Подставляя сюда значения  и
и  по формуле (37) и производя дифференцирование и группировку членов, получаем
по формуле (37) и производя дифференцирование и группировку членов, получаем

Перенося из правой части в левую первое слагаемое и учитывая, что
как векторное произведение параллельных векторов, после объединения слагаемых имеем

В этой формуле выражение в квадратных скобках равно нулю на основании теоремы о движении центра масс системы (18) и, следовательно, формула примет вид
или

где  является главным моментом всех внешних сил относительно центра масс.
является главным моментом всех внешних сил относительно центра масс.
Формула (38) и выражает рассматриваемую теорему об изменении кинетического момента системы относительно центра масс для относительного движения системы по отношению к системе координат, движущейся поступательно с центром масс; она формулируется так же, как если бы центр масс был неподвижной точкой.
Эту теорему применяют для изучения вращательной части плоского движения и движения свободного твердого тела вокруг центра масс.
Дифференциальные уравнения плоского движения твердого тела
Используя теоремы о движении центра масс и изменении кинетического момента системы относительно центра масс для относительного движения системы по отношению к системе координат, движущейся поступательно с центром масс, получим дифференциальные уравнения плоского движения твердого тела.
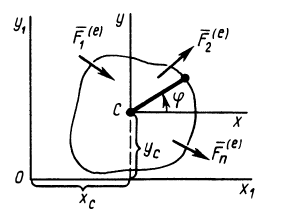
Рис. 57
В плоскости движения центра масс тела, совершающего плоское движение, выберем неподвижную систему координат  , относительно которой рассматривается движение, и движущуюся поступательно вместе с центром масс систему
, относительно которой рассматривается движение, и движущуюся поступательно вместе с центром масс систему  (рис. 57). Пусть
(рис. 57). Пусть  и
и  — координаты центра масс тела относительно неподвижной системы координат. Тогда по теореме о движении центра масс получим два следующих дифференциальных уравнения плоского движения твердого тела:
— координаты центра масс тела относительно неподвижной системы координат. Тогда по теореме о движении центра масс получим два следующих дифференциальных уравнения плоского движения твердого тела:

где  — масса тела.
— масса тела.
Третье дифференциальное уравнение плоского движения твердого тела получим из теоремы об изменении кинетического момента в относительном движении по отношению к центру масс (38) в проекции на подвижную ось  :
:

Плоское движение твердого тела можно считать состоящим из поступательного движения вместе с центром масс  и вращения вокруг подвижной оси . Для случая вращения вокруг оси кинетический момент относительно этой оси вычисляется по формуле
и вращения вокруг подвижной оси . Для случая вращения вокруг оси кинетический момент относительно этой оси вычисляется по формуле
где  — угловая скорость;
— угловая скорость;  — момент инерции тела относительно оси .
— момент инерции тела относительно оси .
Так как  является величиной постоянной, то после подстановки
является величиной постоянной, то после подстановки  в теорему об изменении’ кинетического момента в относительном движении получим
в теорему об изменении’ кинетического момента в относительном движении получим
Если ввести угол поворота  вокруг подвижной оси , то получим следующее дифференциальное уравнение:
вокруг подвижной оси , то получим следующее дифференциальное уравнение:

Таким образом, для твердого тела, совершающего плоское движение и, следовательно, имеющего три степени свободы, соответственно получим следующие три дифференциальных уравнения:

С помощью этих уравнений можно решать две основные задачи: по заданному плоскому движению твердого тела находить действующие на тело внешние силы и по заданным внешним силам и начальным условиям определять его движение. При решении этих задач должны быть заданы масса тела  и его момент инерции.
и его момент инерции.
- Заказать решение задач по теоретической механике
Теорема Резаля
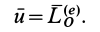
Теореме об изменении кинетического момента системы можно дать следующее кинематическое истолкование. Из кинематики точки известно, что скорость точки можно рассматривать как скорость конца радиуса-вектора, следящего за движущейся точкой, или как скорость изменения самого радиуса-вектора, если он проведен в движущуюся точку из какой-либо неподвижной точки (рис. 58). Траектория движущейся точки при этом является годографом радиуса-вектора г, а скорость точки направлена по касательной к этому годографу и равна первой производной по времени от радиуса-вектора. Аналогично этому, и производную по времени от кинетического момента можно рассматривать как своеобразную скорость конца этого вектора при движении по годографу кинетического момента (рис. 59). Эта скорость не является обычной скоростью точки, так как кинетический момент имеет иную размерность, чем радиус-вектор. Это есть скорость изменения вектора кинетического момента.
Таким образом, если обозначить через  скорость конца кинетического момента, т. е.
скорость конца кинетического момента, т. е.  , то теорему об изменении кинетического момента системы (24) можно представить в новой форме — в виде так называемой теоремы Резаля:
, то теорему об изменении кинетического момента системы (24) можно представить в новой форме — в виде так называемой теоремы Резаля:
Теорему Резаля можно сформулировать так: при движении механический системы скорость точки, совпадающей с концом вектора кинетического момента при движении по годографу этого вектора, равна по величине и параллельна по направлению главному моменту всех внешних сил системы. Точка, относительно которой вычисляются кинетический момент системы и главный момент внешних сил, одна и та же.
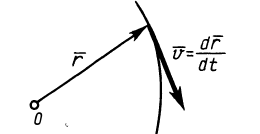
Рис. 58
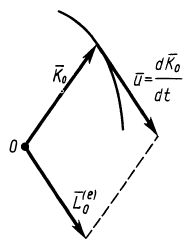
Рис. 59
В форме теоремы Резаля может быть сформулирована и теорема об изменении кинетического момента в относительном движении по отношению к центру масс.
Теорема Резаля особенно удобна для приближенного исследования движения быстровращающихся гироскопов.
Аналогично и теорему об изменении количества движения для системы можно сформулировать в форме теоремы Резаля для количества движения: при движении механической системы скорость точки, совпадающей с концом вектора количества движения при движении по его годографу, равна по величине и параллельна по направлению главному вектору всех внешних сил, действующих на систему.
- Теорема об изменении кинетической энергии
- Потенциальное силовое поле
- Закон сохранения механической энергии
- Принцип Даламбера
- Геометрия масс
- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
- Теоремы об изменении количества движения и о движении центра масс
|
|

Макеты страниц
Кинетический момент твердого тела (общий случай)
Во многих случаях в качестве механической системы выступают твердое тело и система твердых тел.
В динамике твердого тела часто возникает необходимость во введении вспомогательной системы координатных осей, начало которой находится в центре масс тела и которые движутся, оставаясь все время параллельными самим себе (поступательно движутся вместе с центром масс). Такие оси называются осями Кёнига.

Рис. 32.
При вычислении кинетического момента твердое тело мысленно разбиваем на N малых частиц (материальных точек) и вводим две вспомогательные системы координат с началом в центре масс С — систему  осей Кёнига и систему Cxyz, оси которой неизменно связаны с движущимся телом (как бы «вморожены» в тело) (рис. 32). Тогда Рис. 32 движение материальных точек тела относительно основной (неподвижной) системы координат Oxyz можем рассматривать как сложное движение, состоящее из переносного (движение осей Кёнига) и относительного (движение точек тела относительно осей Кёнига). Соответственно, скорости
осей Кёнига и систему Cxyz, оси которой неизменно связаны с движущимся телом (как бы «вморожены» в тело) (рис. 32). Тогда Рис. 32 движение материальных точек тела относительно основной (неподвижной) системы координат Oxyz можем рассматривать как сложное движение, состоящее из переносного (движение осей Кёнига) и относительного (движение точек тела относительно осей Кёнига). Соответственно, скорости  точек тела в выражении для кинетического момента
точек тела в выражении для кинетического момента  будут являться абсолютными скоростями и вычисляться при помощи теоремы сложения скоростей по формулам
будут являться абсолютными скоростями и вычисляться при помощи теоремы сложения скоростей по формулам

Здесь учтено, что переносное движение является поступательным, поэтому переносные скорости  точек тела все одинаковы и равны скорости
точек тела все одинаковы и равны скорости  центра масс.
центра масс.
Подставим это выражение в формулу для определения кинетического момента системы (в данном случае — тела):

Первая сумма приводится к виду

и представляет собой момент относительно центра О количества движения тела  , приложенного в центре масс тела. Вторая сумма определяет главный момент
, приложенного в центре масс тела. Вторая сумма определяет главный момент  относительных количеств движения точек тела
относительных количеств движения точек тела  относительно того же центра О.
относительно того же центра О.
Введем в рассмотрение главный момент относительных количеств движения тела относительно центра масс

где  — радиусы-векторы материальных точек тела, проведенные из центра масс, и покажем, что имеет место равенство
— радиусы-векторы материальных точек тела, проведенные из центра масс, и покажем, что имеет место равенство  . Для этого выразим абсолютные радиусы-векторы
. Для этого выразим абсолютные радиусы-векторы  через радиус-вектор центра масс
через радиус-вектор центра масс  и относительные радиусы-векторы
и относительные радиусы-векторы 

и подставим в выражение для 

Но первый член в полученной сумме равен нулю, так как равна нулю величина  . Действительно, для этой величины последовательно можем написать:
. Действительно, для этой величины последовательно можем написать:

так как  сохраняет постоянное значение (равное нулю). Следовательно, имеет место равенство
сохраняет постоянное значение (равное нулю). Следовательно, имеет место равенство  .
.
В результате для вычисления кинетического момента твердого тела относительно неподвижного центра О получаем следующую общую формулу:

Напомним, что в этой формуле М — масса тела,  — радиус-вектор центра масс, проведенный из неподвижного центра О,
— радиус-вектор центра масс, проведенный из неподвижного центра О,  — скорость центра масс,
— скорость центра масс,  — кинетический момент тела в его относительном движении по отношению к осям Кёнига, вычисленный относительно центра масс.
— кинетический момент тела в его относительном движении по отношению к осям Кёнига, вычисленный относительно центра масс.
Отметим частные случаи.
Тело движется поступательно. В этом случае относительное движение отсутствует — положение тела не изменяется относительно осей Кёнига. Относительные скорости частиц  (
( ) равны нулю, вместе с ними равен нулю и относительный кинетический момент тела
) равны нулю, вместе с ними равен нулю и относительный кинетический момент тела  .
.
Следовательно, для определения кинетического момента остается только первый член в полученной общей формуле, т. е.

Так как  формулу можно записать и в другом виде:
формулу можно записать и в другом виде:

Из нее следует, что кинетический момент поступательно движущегося тела относительно некоторого неподвижного центра равен моменту относительно этого центра количества движения тела, приложенного в его центре масс. Правило сохраняется и при вычислении кинетических моментов тела относительно координатных осей  .
.
Тело вращается вокруг неподвижной оси. В этом случае удобно действовать непосредственно, не прибегая к разложению движения на переносное и относительное.
Выберем моментный центр О на оси вращения тела, ось вращения совместим с осью  неподвижной системы координат Oxyz (рис. 33). Выделим в теле частицу (материальную точку)
неподвижной системы координат Oxyz (рис. 33). Выделим в теле частицу (материальную точку)  с массой
с массой  и радиусом-вектором
и радиусом-вектором  . Тогда для скорости
. Тогда для скорости  частицы можем записать
частицы можем записать


Рис. 33.
Здесь  — орты осей Oxyz;
— орты осей Oxyz;  — проекции вектора
— проекции вектора  угловой скорости тела на эти оси;
угловой скорости тела на эти оси;  — координаты выделенной частицы.
— координаты выделенной частицы.
В полученном выражении коэффициенты при ортах равны проекциям скорости частицы на соответствующие координатные оси. Следовательно, для проекций количества движения  выделенной частицы будем иметь выражения
выделенной частицы будем иметь выражения

Для момента количества движения частицы относительно точки О с учетом полученных равенств получаем

Отсюда следуют формулы для моментов количества движения частицы  относительно координатных осей
относительно координатных осей

Суммируя соответствующие моменты для всех материальных точек тела, определяем проекции на оси Oxyz кинетического момента  всего тела:
всего тела:

Из этих формул основное значение для дальнейшего имеет формула

определяющая проекцию кинетического момента вращающегося тела на направление оси вращения.
Сравнивая проекции кинетического момента тела с проекциями угловой скорости  , видим, что векторы угловой скорости и кинетического момента вращающегося тела не направлены вдоль одной прямой (см. также рис. 33). Векторы
, видим, что векторы угловой скорости и кинетического момента вращающегося тела не направлены вдоль одной прямой (см. также рис. 33). Векторы  и
и  будут коллинеарными лишь в том случае, если выполняются равенства
будут коллинеарными лишь в том случае, если выполняются равенства  .
.
Вращающееся твердое тело (ротор), для которого выполняются условия  (центр масс лежит на оси вращения) и
(центр масс лежит на оси вращения) и  (ось вращения является главной осью инерции), называется статически и динамически уравновешенным. Таковы, например, однородный круглый диск, однородный круглый цилиндр, однородный шар при их вращении вокруг одной из своих осей симметрии.
(ось вращения является главной осью инерции), называется статически и динамически уравновешенным. Таковы, например, однородный круглый диск, однородный круглый цилиндр, однородный шар при их вращении вокруг одной из своих осей симметрии.
Иногда требуется знать проекции кинетического момента на оси  , неизменно связанные с самим движущимся телом —
, неизменно связанные с самим движущимся телом —  . Вид формул для их вычисления сохраняется, только моменты инерции и угловую скорость следует задавать теперь в осях
. Вид формул для их вычисления сохраняется, только моменты инерции и угловую скорость следует задавать теперь в осях  :
:

Пример. На круглой горизонтальной платформе массы  и радиуса R стоит человек массы
и радиуса R стоит человек массы  (рис. 34). Платформа и человек вначале неподвижны. Что будет происходить с платформой, если человек будет двигаться по ней с относительной скоростью
(рис. 34). Платформа и человек вначале неподвижны. Что будет происходить с платформой, если человек будет двигаться по ней с относительной скоростью  по окружности радиуса
по окружности радиуса  . Трением в опорах пренебречь, платформу считать однородным круглым диском.
. Трением в опорах пренебречь, платформу считать однородным круглым диском.

Рис. 34.
Решение. Выберем в качестве системы платформу вместе с находящимся на ней человеком, принимаемым за материальную точку М. Внешними силами будут вес платформы  , вес человека
, вес человека  , реакции подпятника А и подшипника В. Момент каждой из этих сил относительно оси вращения платформы (оси z) равен нулю, поэтому равен нулю и главный момент
, реакции подпятника А и подшипника В. Момент каждой из этих сил относительно оси вращения платформы (оси z) равен нулю, поэтому равен нулю и главный момент  внешних сил относительно этой оси. Следовательно, кинетический момент системы относительно оси z остается при движении постоянным, равным своему начальному значению
внешних сил относительно этой оси. Следовательно, кинетический момент системы относительно оси z остается при движении постоянным, равным своему начальному значению

В начале движения платформа и человек неподвижны, поэтому  , и это равенство принимает вид
, и это равенство принимает вид

Если человек будет перемещаться по платформе с некоторой абсолютной скоростью v, то его количество движения  имеет относительно оси
имеет относительно оси  момент
момент

Но кинетический момент всей системы равен нулю, поэтому платформа начнет вращаться, а ее кинетический момент относительно оси вращения  будет равным и противоположным по знаку моменту количества движения человека
будет равным и противоположным по знаку моменту количества движения человека  .
.
Для определения угловой скорости платформы составим выражение для кинетического момента системы относительно оси  :
:

Так как платформа вращается, движение человека (точки М) будет сложным движением. По теореме сложения скоростей для абсолютной скорости v получаем:

Условие сохранения кинетического момента  теперь запишется так:
теперь запишется так:

Отсюда находим

В заключение заметим, что теорема об изменении кинетического момента выполняется только по отношению к неподвижному центру и неподвижным координатным осям. Однако существует единственная подвижная точка, относительно которой теорема продолжает оставаться справедливой. Такой точкой является центр масс (системы или тела). Теорема сохраняется и по отношению к осям Кенига. Доказательство этих положений мы опускаем.
Оглавление
- Предисловие
- Введение в динамику
- Динамика точки
- Две основные задачи динамики точки
- Дифференциальные уравнения движения материальной точки
- Способы решения основных задач динамики точки
- Лекция 12. Способы интегрирования дифференциального уравнения прямолинейного движения материальной точки
- Дифференциальное уравнение и начальные условия прямолинейного движения
- Определение закона движения точки под действием силы, зависящей только от времени
- Определение закона движения точки под действием силы, зависящей только от положения
- О нахождении закона движения при постоянной силе и силе, зависящей только от скорости
- Лекция 13. Колебательные движения материальной точки
- Свободные колебания
- Вынужденные колебания
- Явление резонанса
- Влияние сопротивления на свободные и вынужденные колебания
- Динамика системы
- Механическая система
- Масса и центр масс системы
- Момент инерции относительно оси
- Моменты инерции относительно координатных осей
- Моменты инерции твердого тела
- Осевые моменты инердии некоторых твердых тел
- Радиус инерции
- Главные оси инерции
- Классификация сил, действующих на точки системы
- Свойства внутренних сил
- Дифференциальные уравнения движения механической системы
- Теорема о движении центра масс
- Законы сохранения движения дентра масс
- Общие теоремы динамики
- Основные динамические величины механической системы
- Теорема об изменении количества движения
- Законы сохранения количества движения
- О вычислении количества движения
- Интегральная форма теоремы об изменении количества движения
- Лекция 16. Теорема об изменении кинетического момента
- Кинетический момент
- Теорема об изменении кинетического момента
- Законы сохранения кинетического момента
- Кинетический момент твердого тела (общий случай)
- Дифференциальные уравнения движения твердого тела
- Физический маятник и его малые колебания
- Лекция 17. Теорема об изменении кинетической энергии
- Работа силы
- Работа силы тяжести
- Работа упругой силы пружины
- Работа силы трения скольжения
- Работа пары сил трения качения
- Потенциальные силы
- Вычисление потенциальной энергии
- Теорема об изменении кинетической энергии
- Вычисление кинетической энергии твердого тела
- О решении задач при помощи теоремы об изменении кинетической энергии
- Общие принципы механики
- Принцип Даламбера для материальной точки
- Принцип Даламбера для механической системы
- Определение главного вектора и главного момента сил инерции твердого тела
- Тело движется поступательно с ускорением
- Тело совершает вращательное движение
- Тело совершает плоскопараллельное движение
- Лекция 19. Принцип возможных перемещений
- Возможные перемещения
- Уравнения связей. Классификация связей по виду их уравнений
- Связи идеальные и неидеальные
- Принцип возможных перемещений
- Применение принципа возможных перемещений
- Лекция 20. Принцип Даламбера-Лагранжа и общее уравнение динамики. Уравнения движения механической системы в обобщенных координатах
- Принцип Даламбера-Лагранжа
- Общее уравнение динамики
- Обобщенные координаты и обобщенные силы
- Уравнения движения механической системы в обобщенных координатах
- Рекомендуемая литература

Кинетический момент системы относительно центра и относительно оси. Кинетический момент вращающегося твердого тела относительно оси вращения
Кинетическим моментом системы относительно какого-либо центра  называется главный момент количеств движения системы относительно этого центра, т. е. вектор
называется главный момент количеств движения системы относительно этого центра, т. е. вектор  , равный геометрической сумме векторов
, равный геометрической сумме векторов  моментов количеств движения
моментов количеств движения  всех точек системы относительно этого центра:
всех точек системы относительно этого центра:

Кинетическим моментом системы относительно какой-либо оси называется главный момент  количеств движения системы относительно этой оси, равный алгебраической сумме моментов
количеств движения системы относительно этой оси, равный алгебраической сумме моментов  количеств движения всех точек системы относительно этой оси:
количеств движения всех точек системы относительно этой оси:

Так же как и главные моменты сил относительно центра и оси, проходящей через этот центр (стр. 115), кинетический момент системы относительно какого-либо центра и кинетический момент этой системы относительно оси  , проходящей через этот центр, связаны между собой зависимостью:
, проходящей через этот центр, связаны между собой зависимостью:

Проекция кинетического момента системы относительно какого-либо центра на любую ось, проходящую через этот центр, равна кинетическому моменту данной системы относительно этой оси.
Установим теперь формулу для вычисления кинетического момента в особо важном для практики случае. Пусть какое-либо твердое тело (рис. 195) вращается вокруг неподвижной оси с угловой скоростью  . Будем рассматривать это тело как неизменяемую систему, состоящую из множества материальных точек.
. Будем рассматривать это тело как неизменяемую систему, состоящую из множества материальных точек.
Найдем кинетический момент этой системы относительно оси вращения . По формуле (175)

Отметим на рис. 195 вектор количества движения произвольной точки  тела и найдем его момент относительно оси .
тела и найдем его момент относительно оси .
Так как все точки вращающегося тела движутся в плоскостях, перпендикулярных к оси вращения, и плечо вектора относительно этой оси равно расстоянию  соответствующей точки до оси вращения, то
соответствующей точки до оси вращения, то

Различные точки тела имеют разную массу  и находятся на разном расстоянии от оси, но угловая скорость в каждый момент у них одинаковая.
и находятся на разном расстоянии от оси, но угловая скорость в каждый момент у них одинаковая.
Следовательно,

где

есть согласно формуле (139) момент инерции  тела относительно оси вращения.
тела относительно оси вращения.
Таким образом, мы получаем:

Кинетический момент вращающегося твердого тела относительно его оси вращения равен произведению момента инерции тела относительно той же оси на угловую скорость тела.
Эта теория взята с полного курса лекций на странице решения задач с подробными примерами по предмету теоретическая механика:
Теоретическая механика — задачи с решением и примерами
Возможно вам будут полезны эти дополнительные темы:

