Кинетическая
энергия материальной точки — скалярная
положительная величина, равная половине
произведения массы точки на квадрат
ее скорости, т. е.
![]() .
.
Кинетическая
энергия механической системы
— арифметическая
сумма кинетических энергий всех
материальных точек этой системы
![]() .
.
Кинетическая
энергия системы, состоящей из п
связанных между собой тел,
равна арифметической сумме кинетических
энергий всех тел этой системы:
![]() .
.
Теорема Кенига.
Кинетическая энергия механической
системы в общем случае ее движения равна
сумме кинетической энергии движения
системы вместе с центром масс и
кинетической энергии системы при ее
движении относительно центра масс:
![]() ,
,
где
![]() —
—
скоростьk
– й точки
системы относительно центра масс.
Поступательное
движение.
При поступательном
движении тела
![]()
![]() .
.
Вращение тела
вокруг неподвижной оси
.
![]() .
.
![]() ,
,
где
![]() – момент инерции тела относительно оси
– момент инерции тела относительно оси
вращения.
Плоскопараллельное
движение.
![]() ,
,
где
![]() — момент инерции плоской фигуры
— момент инерции плоской фигуры
относительно оси, проходящей через
центр масс.
Задача
1.
Вычислить кинетическую энергию
однородного диска массы М
=10 кг,
катящегося без скольжения со скоростью
![]() =
=
5м/с.
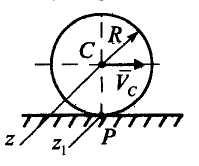
Решение.
Диск совершает плоскопараллельное
движение .

![]() .
.
3. Теорема об изменении кинетической энергии точки
Теорема
в дифференциальной форме. Дифференциал
от кинетической энергии материальной
точки равен элементарной работе силы,
действующей на точку.
Доказательство:
![]() .
.
Подставим в
выражение второго закона динамики
![]() ;
;
![]() .
.
Теорема
интегральной (конечной) форме. Изменение
кинетической энергии материальной
точки на некотором перемещении равно
работе силы, действующей на точку, на
том же перемещении.
Доказательство
Дифференциал от
кинетической энергии точки равен
элементарной работе:
 .
.
Проинтегрируем
 .
.
4. Теорема об изменении кинетической энергии механической системы.
Теорема
в дифференциальной форме. Дифференциал
от кинетической энергии механической
системы равен сумме элементарных работ
внешних и внутренних сил, действующих
на систему.
Доказательство:
Для k
– й точки
системы
![]() .
.
где
![]() и
и![]() соответственно — элементарная работа
соответственно — элементарная работа
внешней и внутренней сил, приложенных
кk–
й точке.
Для всей системы
![]() .
.
где
![]() — кинетическая энергия системы;
— кинетическая энергия системы;![]() — соответственно элементарная работа
— соответственно элементарная работа
всех внешних и внутренних сил, приложенных
к системе. Таким образом,
![]() .
.
Для системы твердых
тел
![]() .
.
Тогда
![]() .
.
Разделим на dt
![]() ,
,
где
![]() — мощность внешних сил;
— мощность внешних сил;![]() — мощность внутренних. Тогда
— мощность внутренних. Тогда
![]() .
.
![]() .
.
Теорема
в интегральной (конечной) форме. Изменение
кинетической энергии механической
системы на некотором перемещении равно
сумме работ внешних и внутренних сил,
приложенных к системе, на том же
перемещении.
Доказательство:
Запишем теорему в интегральной форме
для k–
й точки системы:
![]() ,
,
где
![]() и
и![]() — соответственно работа внешней и
— соответственно работа внешней и
внутренней сил, приложенных кk-й
точке, на некотором перемещении.
Суммируя по всем
точкам системы, получим
![]()
Для системы твердых
тел
![]() (по свойству внутренних сил). Тогда
(по свойству внутренних сил). Тогда
![]() .
.
Задача
2. Каток
А
приводится в движение из состояния
покоя посредством троса, который
одним концом намотан на каток, а вторым
— на барабан В.
Каток А
считать однородным цилиндром массы
![]() = 50кг
= 50кг
и радиуса
![]() = 0,4м.
= 0,4м.
Масса барабана
![]() = 20кг
= 20кг
распределена по его ободу радиуса
![]() = 0,2м.
= 0,2м.
К барабану приложен вращающий момент
![]() = 100Нм.
= 100Нм.
Пренебрегая скольжением и трением
качения катка по горизонтальной плоскости
и весом троса, определить скорость
катка, когда он переместится на расстояние
s
= 2 м.
Решение.
Применим теорему об изменении кинетической
энергии механической системы в
интегральной форме:

![]() ,
,
где
![]() — система движется из состояния покоя
— система движется из состояния покоя
![]() —по свойству
—по свойству
внутренних сил. Тогда
![]() .
.![]() .
.
КатокА
совершает плоскопараллельное движение.
 .
.
Барабан В
совершает вращательное движение.
 .
.
![]() .
.
Внешними силами
являются силы тяжести
![]() ,
,
нормальная реакция![]() ,
,
сила сцепления![]() ,
,
вращающий момент![]() ,
,
реакции![]() и
и![]() .
.
![]()
![]() так как сила
так как сила
![]() ;
;![]() так как сила
так как сила![]() приложена в МЦС;
приложена в МЦС;![]() так как
так как![]() ;
;![]() ,
,![]() ,
,![]() — точка приложения сил не перемещается.
— точка приложения сил не перемещается.
![]() ,
,
где
![]() .
.
Тогда
![]()
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
| Виды энергии: | ||
|---|---|---|
| Механическая | Потенциальная Кинетическая |
|
| ‹♦› | Внутренняя | |
| Электромагнитная | Электрическая Магнитная |
|
| Химическая | ||
| Ядерная | ||
 |
Гравитационная | |
 |
Вакуума | |
| Гипотетические: | ||
 |
Тёмная | |
| См. также: Закон сохранения энергии |
Кинети́ческая эне́ргия — скалярная функция, являющаяся мерой движения материальных точек, образующих рассматриваемую механическую систему, и зависящая только от масс и модулей скоростей этих точек[1]. Работа всех сил, действующих на материальную точку при её перемещении, идёт на приращение кинетической энергии[2]. Для движения со скоростями значительно меньше скорости света кинетическая энергия записывается как

где индекс  нумерует материальные точки. Часто выделяют кинетическую энергию поступательного и вращательного движения[3]. Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением[4]. Когда тело не движется, его кинетическая энергия равна нулю. Возможные обозначения кинетической энергии:
нумерует материальные точки. Часто выделяют кинетическую энергию поступательного и вращательного движения[3]. Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением[4]. Когда тело не движется, его кинетическая энергия равна нулю. Возможные обозначения кинетической энергии:  ,
,  ,
,  и другие. В системе СИ она измеряется в джоулях (Дж), в СГС — в эргах.
и другие. В системе СИ она измеряется в джоулях (Дж), в СГС — в эргах.
Упрощённо, кинетическая энергия — это работа, которую необходимо совершить, чтобы тело массой  разогнать из состояния покоя до скорости
разогнать из состояния покоя до скорости  . Либо, наоборот, это работа, которую может совершить, останавливаясь, тело массой , обладающее начальной скоростью .
. Либо, наоборот, это работа, которую может совершить, останавливаясь, тело массой , обладающее начальной скоростью .
История и этимология понятия[править | править код]
Прилагательное «кинетический» происходит от греческого слова κίνησις (kinesis, «движение»). Дихотомия между кинетической энергией и потенциальной энергией восходит к аристотелевским концепциям потенциальности и актуальности[en][5] .
Принцип классической механики, согласно которому E ∝ mv2/2, был впервые разработан Готфридом Лейбницем и Иоганном Бернулли, описавшими кинетическую энергию как живую силу (лат. vis viva)[6]. Вильгельм Гравезанд из Нидерландов предоставил экспериментальные доказательства этой связи. Сбрасывая грузы с разной высоты на глиняный блок, он определил, что глубина их проникновения пропорциональна квадрату скорости удара. Эмили дю Шатле осознала значение данного эксперимента и опубликовала объяснение[7].
Понятия «кинетическая энергия» и «работа» в их нынешнем научном значении восходят к середине XIX века. В 1829 году Гаспар-Гюстав Кориолис опубликовал статью Du Calcul de l’Effet des Machines, в которой излагалась математика того, что по сути является кинетической энергией. Создание и введение в оборот самого термина «кинетическая энергия» приписывают Уильяму Томсону (лорду Кельвину) c 1849—1851 гг.[8][9]. Ренкин, который ввел термин «потенциальная энергия» в 1853 году[10], позже цитировал У. Томсона и П. Тэйта с заменой слова «кинетическая» на «фактическая»[11].
Кинетическая энергия в классической механике[править | править код]
Случай одной материальной точки[править | править код]
По определению, кинетической энергией материальной точки массой называется величина
 ,
,

при этом предполагается, что скорость точки всегда значительно меньше скорости света. С использованием понятия импульса ( ) данное выражение примет вид
) данное выражение примет вид  .
.
Если  — равнодействующая всех сил, приложенных к точке, выражение второго закона Ньютона запишется как
— равнодействующая всех сил, приложенных к точке, выражение второго закона Ньютона запишется как  . Скалярно умножив его на перемещение материальной точки
. Скалярно умножив его на перемещение материальной точки  и учитывая, что
и учитывая, что  , причём
, причём  , получим
, получим  .
.
Если система замкнута (внешние силы отсутствуют) или равнодействующая всех сил равна нулю, то стоящая под дифференциалом величина  остаётся постоянной, то есть кинетическая энергия является интегралом движения.
остаётся постоянной, то есть кинетическая энергия является интегралом движения.
Случай абсолютно твёрдого тела[править | править код]
При рассмотрении движения абсолютно твёрдого тела его можно представить как совокупность материальных точек. Однако, обычно кинетическую энергию в таком случае записывают, используя формулу Кёнига, в виде суммы кинетических энергий поступательного движения объекта как целого и вращательного движения:

Здесь  — масса тела,
— масса тела,  — скорость центра масс,
— скорость центра масс,  и
и  — угловая скорость тела и его момент инерции относительно мгновенной оси, проходящей через центр масс[12].
— угловая скорость тела и его момент инерции относительно мгновенной оси, проходящей через центр масс[12].
Кинетическая энергия в гидродинамике[править | править код]
В гидродинамике вместо массы материальной точки рассматривают массу единицы объёма, то есть плотность жидкости или газа  . Тогда кинетическая энергия, приходящаяся на единицу объёма, двигающегося со скоростью
. Тогда кинетическая энергия, приходящаяся на единицу объёма, двигающегося со скоростью  , то есть плотность кинетической энергии
, то есть плотность кинетической энергии  (Дж/м3), запишется:
(Дж/м3), запишется:

где по повторяющемуся индексу  , означающему соответствующую проекцию скорости, предполагается суммирование.
, означающему соответствующую проекцию скорости, предполагается суммирование.
Поскольку в турбулентном потоке жидкости или газа характеристики состояния вещества (в том числе, плотность и скорость) подвержены хаотическим пульсациям, физический интерес представляют осреднённые величины. Влияние гидродинамических флуктуаций на динамику потока учитывается методами статистической гидромеханики, в которой уравнения движения, описывающие поведение средних характеристик потока, в соответствии с методом О. Рейнольдса, получаются путём осреднения уравнений Навье-Стокса[13]. Если, в согласии с методом Рейнольдса, представить  ,
,  , где черта сверху — знак осреднения, а штрих — отклонения от среднего, то плотность кинетической энергии приобретёт вид:
, где черта сверху — знак осреднения, а штрих — отклонения от среднего, то плотность кинетической энергии приобретёт вид:

где  — плотность кинетической энергии, связанной с упорядоченным движением жидкости или газа,
— плотность кинетической энергии, связанной с упорядоченным движением жидкости или газа,  — плотность кинетической энергии, связанной с неупорядоченным движением («плотность кинетической энергии турбулентности»[13], часто называемой просто «энергией турбулентности»), а
— плотность кинетической энергии, связанной с неупорядоченным движением («плотность кинетической энергии турбулентности»[13], часто называемой просто «энергией турбулентности»), а  — плотность кинетической энергии, связанная с турбулентным потоком вещества (
— плотность кинетической энергии, связанная с турбулентным потоком вещества ( — плотность флуктуационного потока массы, или «плотность турбулентного импульса»). Эти формы кинетической энергии жидкости обладают разными трансформационными свойствами при преобразовании Галилея: кинетическая энергия упорядоченного движения
— плотность флуктуационного потока массы, или «плотность турбулентного импульса»). Эти формы кинетической энергии жидкости обладают разными трансформационными свойствами при преобразовании Галилея: кинетическая энергия упорядоченного движения  зависит от выбора системы координат, в то время как кинетическая энергия турбулентности
зависит от выбора системы координат, в то время как кинетическая энергия турбулентности  от него не зависит. В этом смысле кинетическая энергия турбулентности дополняет понятие внутренней энергии.
от него не зависит. В этом смысле кинетическая энергия турбулентности дополняет понятие внутренней энергии.
Подразделение кинетической энергии на упорядоченную и неупорядоченную (флуктуационную) части зависит от выбора масштаба осреднения по объёму или по времени. Так, например, крупные атмосферные вихри циклоны и антициклоны, порождающие определённую погоду в месте наблюдения, рассматриваются в метеорологии как упорядоченное движение атмосферы, в то время как с точки зрения общей циркуляции атмосферы и теории климата это — просто большие вихри, относимые к неупорядоченному движению атмосферы.
Кинетическая энергия в квантовой механике[править | править код]
В квантовой механике кинетическая энергия представляет собой оператор, записывающийся, по аналогии с классической записью, через импульс, который в этом случае также является оператором ( ,
,  — мнимая единица):
— мнимая единица):

где  — редуцированная постоянная Планка,
— редуцированная постоянная Планка,  — оператор набла,
— оператор набла,  — оператор Лапласа. Кинетическая энергия в таком виде входит в важнейшее уравнение квантовой механики — уравнение Шрёдингера[14].
— оператор Лапласа. Кинетическая энергия в таком виде входит в важнейшее уравнение квантовой механики — уравнение Шрёдингера[14].
Кинетическая энергия в релятивистской механике[править | править код]
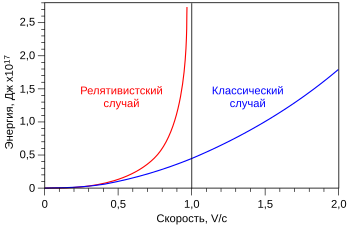
Зависимости кинетической энергии от скорости в классическом и релятивистском случаях для массы в 1 кг
Если в задаче допускается движение со скоростями, близкими к скорости света, кинетическая энергия материальной точки определяется как:

- где — масса материальной точки,
- — скорость движения в выбранной инерциальной системе отсчёта,
- — скорость света в вакууме ( — энергия покоя).



Кинетическая энергия в этой формуле может быть разложена в ряд Маклорена по степеням  :
:

При скоростях много меньших скорости света ( ) пренебрегаем членами разложения с высшими степенями и выражение для переходит в классическую формулу
) пренебрегаем членами разложения с высшими степенями и выражение для переходит в классическую формулу  .
.
Как и в классическом случае, имеет место соотношение  , получаемое посредством умножения на выражения второго закона Ньютона (в виде
, получаемое посредством умножения на выражения второго закона Ньютона (в виде  ).
).
Релятивистское соотношение между кинетической энергией и импульсом p записывается в виде

Разложив это выражение по степеням  получаем
получаем

первый член которого равен нерелятивистскому выражению кинетической энергии через импульс, а последующие члены — релятивистские поправки к этому выражению, которые малы при 
Свойства кинетической энергии[править | править код]
- Аддитивность. Это свойство означает, что кинетическая энергия механической системы, состоящей из материальных точек, равна сумме кинетических энергий всех материальных точек, входящих в систему[1].
- Инвариантность по отношению к повороту системы отсчёта. Кинетическая энергия не зависит от положения точки и направления её скорости, а зависит лишь от модуля скорости или от квадрата её скорости[1].
- Неинвариантность по отношению к смене системы отсчёта в общем случае. Это ясно из определения, так как скорость претерпевает изменение при переходе от одной системы отсчёта к другой.
- Сохранение. Кинетическая энергия не изменяется при взаимодействиях, изменяющих лишь механические характеристики системы. Это свойство инвариантно по отношению к преобразованиям Галилея[1]. Свойства сохранения кинетической энергии и второго закона Ньютона достаточно, чтобы вывести математическую формулу кинетической энергии[15][16].
Физический смысл кинетической энергии[править | править код]
Работа всех сил, действующих на материальную точку при её перемещении, идёт на приращение кинетической энергии[2]:

Это равенство актуально как для классической, так и для релятивистской механики (получается интегрированием выражения между состояниями 1 и 2).
Соотношение кинетической и внутренней энергии[править | править код]
Кинетическая энергия зависит от того, с каких позиций рассматривается система. Если рассматривать макроскопический объект (например, твёрдое тело видимых размеров) как единое целое, можно говорить о такой форме энергии, как внутренняя энергия. Кинетическая энергия в этом случае появляется лишь тогда, когда тело движется как целое.
То же тело, рассматриваемое с микроскопической точки зрения, состоит из атомов и молекул, и внутренняя энергия обусловлена движением атомов и молекул и рассматривается как следствие теплового движения этих частиц, а абсолютная температура тела прямо пропорциональна средней кинетической энергии такого движения атомов и молекул. Коэффициент пропорциональности — постоянная Больцмана.
См. также[править | править код]
- Теорема о кинетической энергии системы
- Потенциальная энергия
- Закон сохранения энергии
- Хаос
- Энтальпия
- Негэнтропия
- Термодинамика
- Парадокс кинетической энергии
Примечания[править | править код]
- ↑ 1 2 3 4 Айзерман, 1980, с. 49.
- ↑ 1 2 Сивухин Д. В. § 22. Работа и кинетическая энергия. // Общий курс физики. — М.: Наука, 1979. — Т. I. Механика. — С. 131. — 520 с.
- ↑ Тарг С. М. Кинетическая энергия // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Советская энциклопедия, 1990. — Т. 2: Добротность — Магнитооптика. — С. 360. — 704 с. — 100 000 экз. — ISBN 5-85270-061-4.
- ↑ Батыгин В. В., Топтыгин И. Н. 3.2. Кинематика релятивистских частиц // Современная электродинамика, часть 1. Микроскопическая теория. — Москва, Ижевск: Институт компьютерных исследований, 2002. — С. 238. — 736 с. — 1000 экз. — ISBN 5-93972-164-8.
- ↑ Brenner, Joseph. Logic in Reality. — illustrated. — Springer Science & Business Media, 2008. — P. 93. — ISBN 978-1-4020-8375-4. Архивная копия от 25 января 2020 на Wayback Machine Extract of page 93 Архивировано 4 августа 2020 года.
- ↑ Мах Э. Механика. Историко-критический очерк её развития. — Ижевск: «РХД», 2000. — С. 252. — 456 с. — ISBN 5-89806-023-5.
- ↑ Judith P. Zinsser. Emilie Du Châtelet : daring genius of the Enlightenment. — New York: Penguin Books, 2007. — viii, 376 pages, 16 unnumbered pages of plates с. — ISBN 0-14-311268-6, 978-0-14-311268-6.
- ↑ Crosbie Smith. Energy and empire : a biographical study of Lord Kelvin. — Cambridge [Cambridgeshire]: Cambridge University Press, 1989. — xxvi, 866 pages с. — ISBN 0-521-26173-2, 978-0-521-26173-9. Архивировано 25 января 2022 года.
- ↑ John Theodore Merz. A history of European thought in the nineteenth century. — Gloucester, Mass.: Peter Smith, 1976. — 4 volumes с. — ISBN 0-8446-2579-5, 978-0-8446-2579-9.
- ↑ William John Macquorn Rankine. XVIII. On the general law of the transformation of energy // The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science. — 1853-02. — Т. 5, вып. 30. — С. 106–117. — ISSN 1941-5990 1941-5982, 1941-5990. — doi:10.1080/14786445308647205.
- ↑ W.J. Macquorn Rankine. XIII. On the phrase “Potential energy,” and on the definitions of physical quantities // The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science. — 1867-02. — Т. 33, вып. 221. — С. 88–92. — ISSN 1941-5990 1941-5982, 1941-5990. — doi:10.1080/14786446708639753.
- ↑ Голубева О. В. Теоретическая механика. — М.: «Высшая школа», 1968. — С. 243—245. Архивировано 23 августа 2017 года.
- ↑ 1 2 Монин А. С., Яглом А. М. Статистическая гидромеханика. Часть 1. — М.: Наука, 1965. — 639 с.
- ↑ Блохинцев Д. И. Основы квантовой механики Архивная копия от 15 февраля 2022 на Wayback Machine, 5-е изд. Наука, 1976. — 664 с., см. § 26.
- ↑ Айзерман, 1980, с. 54.
- ↑ Сорокин В. С. «Закон сохранения движения и мера движения в физике» Архивная копия от 1 января 2015 на Wayback Machine // УФН, 59, с. 325—362, (1956)
Литература[править | править код]
- Айзерман М. А. Классическая механика. — М.: Наука, 1980. — 368 с.
- Фриш С. Э. Курс общей физики. В 3-х тт. Т.1. Физические основы механики. Молекулярная физика. Колебания и волны. 13-е изд. — СПб.: Лань, 2010. — 480 с. — ISBN 978-5-8114-0663-0.
- Сивухин Д. В. Общий курс физики. Т. 1. Механика. 5-е изд. — М.: Физматлит, 2006. — 560 с. — ISBN 5-9221-0715-1.
Содержание:
- Определение и формула кинетической энергии
- Кинетическая энергия материальной точки и тела
- Единицы измерения кинетической энергии
- Теорема Кенига
- Примеры решения задач
Определение и формула кинетической энергии
Определение
Кинетическую энергию тела определяют при помощи работы, которая совершается телом при его торможении от начальной скорости, до скорости, равной нулю.
Кинетическая энергия тела – мера механического движения тела. Она зависит от относительной скорости тел.
Встречаются следующие обозначения кинетической энергии: Ek,Wk,T.
Работу, которую производят над телом (A’) можно связать с изменением его кинетической энергии:
$$A^{prime}=E_{k 2}-E_{k 1}(1)$$
Кинетическая энергия материальной точки и тела
Кинетическая энергия материальной точки равна:
$$E_{k}=frac{m v^{2}}{2}=frac{p^{2}}{2 m}=frac{p v}{2}(2)$$
где m – масса материальной точки, p – импульс материальной точки, v – скорость ее движения. Кинетическая энергия является скалярной физической величиной.
Если тело нельзя принять за материальную точку, то его кинетическая энергия рассчитывается как сумма кинетических энергий всех материальных точек, которые составляют исследуемое тело:
$$E_{k}=frac{1}{2} int_{m} v^{2} d m=frac{1}{2} int_{m} rho v^{2} d V(3)$$
где dm – элементарный участок тела, который можно считать материальной точкой, dV – объем выделенного элементарного участка тела,
v – скорость перемещения рассматриваемого элемента, $rho$ – плотность участка, m–масса всего рассматриваемого тела, V – объем тела.
В том случае, если тело (отличное от материальной точки) движется поступательно, то его кинетическую энергию можно рассчитать, применяя формулу (2), в которой все параметры отнесены к телу в целом.
При вращении тело вокруг неподвижной оси его кинетическую энергию можно вычислить, применяя формулу:
$$E_{k}=frac{J omega^{2}}{2}=frac{omega^{2}}{2} int_{m} r^{2} d m=frac{L^{2}}{2 J}=frac{L omega}{2}(4)$$
где J – момент инерции тела по отношению к оси вращения, ?–модуль угловой скорости вращения тела,
r – расстояние от элементарного участка тела до оси вращения,
L – проекция момента импульса вращающегося тела на ось во круг которой идет вращение.
Если твердое тело совершает вращение относительно неподвижной точки (например, точки O), то его кинетическую энергию находят как:
$$E_{k}=frac{bar{L} bar{omega}}{2}(5)$$
$bar{L}$ – момент импульса рассматриваемого тела относительно точки О.
Единицы измерения кинетической энергии
Основной единицей измерения кинетической энергии (как и любого другого вида энергии) в системе СИ служит:
[Ek]=Дж (джоуль),
в системе СГС –[Ek]= эрг.
При этом: 1 дж= 107 эрг.
Теорема Кенига
Для самого общего случая при расчете кинетической энергии применяют теорему Кенига. В соответствии с которой,
кинетическая энергия совокупности материальных точек есть сумма кинетической энергии поступательного перемещения
системы со скоростью центра масс (vc) и кинетической энергии
(E’k) системы при ее относительном движении к поступательному перемещению системы отсчета.
При этом начало системы отсчета связывают с центром масс системы. Математически данную теорему можно записать как:
$$E_{k}=sum_{i=1}^{n} frac{m_{i} v_{i}^{2}}{2}=frac{m v_{c}^{2}}{2}+E_{k}^{prime}$$
где $mathrm{E}_{k}^{prime}=sum_{i=1}^{n} frac{m_{i} v_{i}^{prime 2}}{2}, v_{i}^{prime}=v_{i}-v_{c}, m=sum_{i=1}^{n} m_{i}$ –суммарная масса системы материальных точек.
Так, если рассматривать твердое тело, то его кинетическую энергию можно представить как:
$$E_{k}=frac{m v_{c}^{2}}{2}+frac{J_{c} omega^{2}}{2}(7)$$
где Jc – момент инерции тела по отношению к оси вращения, проходящей через центр масс. В частности, при плоском движении
Jc=const.В общем случае, ось (она называется мгновенной) перемещается в теле, тогда момент инерции является переменным во времени.
Примеры решения задач
Пример
Задание. Какова работа, которая производится над телом за t=3 c (с начала отсчета времени),
при силовом взаимодействии, если изменение кинетической энергии исследуемого тела задано графиком (рис.1)?
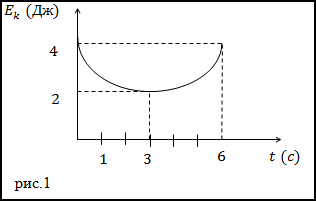
Решение. По определению изменение кинетической энергии равно работе (A’),
которая производится над телом при силовом взаимодействии, то есть можно записать, что:
$$A^{prime}=Delta E_{k}(1.1)$$
Исследуя график, приведенный на рис.1 мы видим, что за время t=3 c кинетическая энергия тела изменяется от 4 Дж до 2 Дж, следовательно:
$A^{prime}=2-4=-2$ (Дж)
Ответ. A’=-2 Дж.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Пример
Задание. Материальная точка движется по окружности, радиус которой равен R. Кинетическая
энергия частицы связана c величиной пути (s), пройденного ей в соответствии с формулой:
$E_{k}=alpha s^{2}(alpha=$const$)$. Какое уравнение связывает силу (F), действующую на точку и путь s?
Решение. В качестве основы для решения задачи используем формулу, определяющую кинетическую энергию материальной точки:
$$E_{k}=frac{m v^{2}}{2}(2.1)$$
Но по условию задачи:
$$E_{k}=alpha s^{2}(2.2)$$
Следовательно, можно приравнять правые части выражений (2.1) и (2.2), и получить:
$$frac{m v^{2}}{2}=alpha s^{2} rightarrow v^{2}=frac{2 alpha s^{2}}{m} rightarrow v=s sqrt{frac{2 alpha}{m}}(2.3)$$
Из второго закона Ньютона нам известно, что сила, действующая на частицу, будет равна:
$$bar{F}=m bar{a}(2.4)$$
где
$$a=sqrt{a_{n}^{2}+a_{tau}^{2}}(2.5)$$
При этом нормальное ускорение частицы (an), перемещающейся по окружности найдем как:
$$a_{n}=frac{v^{2}}{R}=frac{2 alpha s^{2}}{R m}(2.6)$$
Тангенциальную составляющую ускорения (aт)используя определение тангенциального ускорения, определение скорости
($v=frac{d s}{d t}$) и выражение v(s) (2.3) вычислим как:
$$a_{tau}=frac{d v}{d t}=frac{d v}{d s} cdot frac{d s}{d t}=sqrt{frac{2 a}{m}} cdot v=s frac{2 a}{m}(2.7)$$
Используем выражения: (2.5), (2.6), (2.7), окончательно получаем для модуля силы:
$$F=m a=m sqrt{frac{4 alpha^{2} s^{4}}{R^{2} m^{2}}+s^{2} frac{4 alpha^{2}}{m^{2}}}=2 alpha s sqrt{frac{s^{2}}{R^{2}}+1}$$
Ответ. $F=2 alpha s sqrt{frac{s^{2}}{R^{2}}+1}$
Читать дальше: Формула массы тела.
Энергия – важнейшее понятие и термин в механике. Что такое энергия, и что она значит? Существует множество определений, и вот одно из них.
Что такое энергия?
Энергия в физике – это способность тела совершать работу.
Кинетическая энергия
Что такое кинетическая энергия?
Рассмотрим тело, которое двигалось под действием каких-то сил, изменило свою скорость с v1→ до v2→. В этом случае силы, действующие на тело, совершили определенную работу A.
Работа всех сил, действующих на тело, равна работе равнодействующей силы.

Fр→=F1→+F2→
A=F1·s·cosα1+F2·s·cosα2=Fрcosα.
Как находить связь между изменением скорости тела и работой, совершенной действующими на тело силами. Для простоты будем считать, что на тело действует одна сила F→, направленная вдоль прямой линии. Под действием этой силы тело движется равноускоренно и прямолинейно. В этом случае векторы F→, v→, a→, s→ совпадают по направлению и их можно рассматривать как алгебраические величины.
Работа силы F→ равна A=Fs. Перемещение тела выражается формулой s=v22-v122a. Отсюда:
A=Fs=F·v22-v122a=ma·v22-v122a
A=mv22-mv122=mv222-mv122.
Если вычислять, то работа, совершенная силой, пропорционально изменению квадрата скорости тела.
Кинетическая энергия тела равна половине произведения массы тела на квадрат его скорости. Вот как выглядит формула кинетической энергии:
EK=mv22.
Кинетическая энергия – это энергия движения тела. При нулевой скорости она равна нулю.
Теорема о кинетической энергии
Вновь будем работать с рассмотренным примером и сформулируем теорему о кинетической энергии тела.
Работа приложенной к телу силы равна изменению кинетической энергии тела. Данное утверждение справедливо и тогда, когда тело движется под действием изменяющейся по модулю и направлению силы.
A=EK2-EK1.
Таким образом, кинетическая энергия тела массы m, движущегося со скоростью v→, будет измеряться (при измерении) и равна работе, которую сила должна совершить, чтобы разогнать тело до этой скорости.
A=mv22=EK.
Чтобы остановить тело, нужно совершить работу
A=-mv22=-EK
Потенциальная энергия
Что будет означать или обозначать кинетическая энергия?
Кинетическая энергия – это энергия движения. Наряду с кинетической энергией есть еще такой вид энергии как потенциальная энергия, то есть энергия взаимодействия тел, которая будет вычисляться и зависеть от их положения. Кинетическая и потенциальная энергии рассматриваются параллельно.
Формула потенциальной энергии:
E пот = m * g * h
Например, тело поднято над поверхностью земли. Чем выше оно поднято, тем больше будет потенциал-я энергия. Когда тело движется и падает вниз под действием силы тяжести (притяжения), эта сила совершает работу. Причем работа силы тяжести определяется только вертикальным перемещением тела и не зависит от траектории.

Вообще о потенциально энергии можно говорить только в контексте тех сил, работа которых не зависит от формы траектории тела. Такие силы называются консервативными.
Примеры консервативных сил: сила тяжести, сила упругости.
Когда тело движется вертикально вверх, сила тяжести совершает отрицательную работу.
Рассмотрим вычисление на примере, когда шар переместился из точки с высотой h1 в точку с высотой h2.

При этом сила тяжести совершила работу, равную
A=-mg(h2-h1)=-(mgh2-mgh1).
Эта работа равна изменению величины mgh, взятому с противоположным знаком.
Величина ЕП=mgh – потенциальна энергия в поле силы тяжести. На нулевом уровне (на земле) потенциальную энергию тела можно не рассчитывать: она равна нулю.
Потенциальная энергия – часть полной механической энергии системы, с нахождением в поле консервативных сил. Потенциальная энергия зависит от положения точек, составляющих систему. Механическая энергия – это сумма потенциальной и кинетической энергий, которые есть в компонентах механической системы.
Можно говорить о потенциальной энергии в поле силы тяжести, потенциальной энергии сжатой пружины (пружинной энергии) и т.д.
Работа силы тяжести равна изменению потенциальной энергии, взятому с противоположным знаком.
A=-(EП2-EП1).
Ясно, что потенциальная энергия зависит от выбора нулевого уровня (начала координат оси OY). Подчеркнем, что физический смысл имеет изменение потенциальной энергии при перемещении тел друг относительно друга. При любом выборе нулевого уровня изменение потенциальной энергии будет одинаковым.
При расчете движения тел в поле гравитации Земли, но на значительных расстояниях от нее, во внимание нужно принимать закон всемирного тяготения (зависимость силы тяготения от расстояния до цента Земли). Приведем формулу, выражающую зависимость потенциальной энергии тела.
EП=-GmMr.
Здесь G – гравитационная постоянная, M – масса Земли.
Потенциальная энергия пружины
Представим, что в первом случае мы взяли пружину и удлинили ее на величину x. Во втором случае мы сначала удлинили пружину на 2x, а затем уменьшили на x. В обоих случаях пружина оказалась растянута на x, но это было сделано разными способами.
При этом работа силы упругости при изменении длины пружины на x в обоих случаях была одинакова и равна
Aупр=-A=-kx22.
Величина Eупр=kx22 называется потенциальной энергией сжатой пружины. Она равна работе силы упругости при переходе из данного состояния тела в состояние с нулевой деформацией.
Если перед вами часто поднимается вопрос определения и характеристики энергии, как явления, вам стоит подумать о сохранении описанной выше информации.
Содержание:
Теорема об изменении кинетической энергии:
Для рассмотрения теоремы об изменении кинетической энергии необходимо ввести новое понятие «работа силы» и рассмотреть некоторые простейшие способы ее вычисления.
Работа силы
Работа силы на каком-либо перемещении является одной из основных характеристик, оценивающих действие силы на этом перемещении. Рассмотрим элементарную работу, полную работу и мощность.
Элементарная работа силы
Элементарная работа 

где  — проекция силы
— проекция силы  на направление скорости точки приложения силы или на направление элементарного перемещения, которое считается направленным по скорости точки.
на направление скорости точки приложения силы или на направление элементарного перемещения, которое считается направленным по скорости точки.
Элементарная работа является скалярной величиной. Ее знак определяется знаком проекции силы  , так как перемещение
, так как перемещение  принимаем положительным. При
принимаем положительным. При  элементарная работа
элементарная работа  , а при
, а при  , наоборот,
, наоборот,  . Так как
. Так как  , где
, где  — угол между силой
— угол между силой  и направлением скорости точки
и направлением скорости точки  , то выражение (40) можно представить в виде
, то выражение (40) можно представить в виде

В этой формуле величины  и
и  положительны и знак
положительны и знак  определяется знаком
определяется знаком  . Если — острый угол, то положительна; если тупой угол, то отрицательна.
. Если — острый угол, то положительна; если тупой угол, то отрицательна.
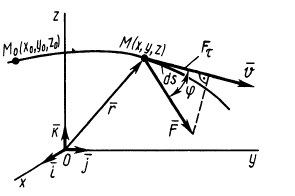
Рис. 60
Итак, элементарная работа силы равна произведению элементарного перемещения на проекцию силы на это перемещение. Отметим частные случаи, которые можно получить из (41):
Таким образом, если сила перпендикулярна элементарному перемещению, то ее элементарная работа равна нулю. В частности, работа нормальной составляющей к скорости силы  всегда равна нулю.
всегда равна нулю.
Приведем другие формулы для вычисления элементарной работы силы. Из кинематики точки известно, что  ;
;  . Следовательно,
. Следовательно,  .
.
После этого, согласно (41), элементарная работа

Элементарная работа силы равна скалярному произведению силы на дифференциал радиуса-вектора точки приложения силы.
Так как  , то, согласно (42),
, то, согласно (42),

Элементарная работа равна скалярному произведению элементарного импульса силы на скорость точки.
Если силу  и радиус-вектор
и радиус-вектор  разложить по осям координат, то
разложить по осям координат, то

Из последней формулы имеем

Подставляя в (42) значения  и
и  , получаем
, получаем

Формулу (44) называют обычно аналитическим выражением элементарной работы. Хотя выражение для элементарной работы (44) по форме и напоминает полный дифференциал функции координат точки, в действительности в общем случае элементарная работа не является полным дифференциалом. Элементарная работа является полным дифференциалом функции координат точки только для специального класса сил — так называемых стационарных потенциальных сил, которые рассмотрены ниже.
Полная работа силы
Для определения полной работы силы на перемещении от точки  до точки
до точки  разобьем это перемещение на
разобьем это перемещение на  перемещений, каждое из которых в пределе переходит в элементарное. Тогда работу
перемещений, каждое из которых в пределе переходит в элементарное. Тогда работу  можно выразить формулой
можно выразить формулой
где  — работа на
— работа на  -м элементарном перемещении, на которые разбито полное перемещение.
-м элементарном перемещении, на которые разбито полное перемещение.
Так как сумма в определении работы является интегральной суммой определения криволинейного интеграла на участке кривой  , то, используя для элементарной работы формулу (40), получаем
, то, используя для элементарной работы формулу (40), получаем

Используя другие выражения для элементарной работы, полную работу силы можно представить также в виде


где момент времени  соответствует точке
соответствует точке  , а момент времени
, а момент времени  — точке
— точке  .
.
Формула (47) особенно удобная для вычисления работы силы, когда сила известна как функция времени. Отметим, что из определения элементарной и полной работы следует:
- работа равнодействующей силы на каком-либо перемещении равна алгебраической сумме работ составляющих сил на том же перемещении;
- работа силы на полном перемещении равна сумме работ этой же силы на составляющих перемещениях, на которые любым образом разбито все перемещение.
Первое свойство, очевидно, достаточно доказать только для элементарной работы равнодействующей силы.
Если сила  является равнодействующей силой системы сил
является равнодействующей силой системы сил  , приложенных к рассматриваемой точке, то она выражается геометрической суммой этих сил. Тогда по определению элементарной работы силы имеем
, приложенных к рассматриваемой точке, то она выражается геометрической суммой этих сил. Тогда по определению элементарной работы силы имеем

Первое свойство доказано.
Второе из отмеченных свойств непосредственно следует из возможности разбиения любым образом полного промежутка интегрирования на составляющие, причем определенный интеграл по полному промежутку интегрирования равен сумме интегралов по составляющим. Единицей полной работы, так же как и элементарной, в СИ является джоуль:  .
.
Если проекция силы на направление скорости  является величиной постоянной, то из (45) получим
является величиной постоянной, то из (45) получим
где  —путь, пройденный точкой.
—путь, пройденный точкой.
Так как  , то последнюю формулу можно представить в виде
, то последнюю формулу можно представить в виде
Следует отметить, что в этой формуле как  , так и
, так и  могут быть переменными, но
могут быть переменными, но  является постоянной величиной. Это выполняется, если и
является постоянной величиной. Это выполняется, если и  постоянны. Если дополнительно угол
постоянны. Если дополнительно угол  или
или  , то тогда
, то тогда
причем эта формула применима как для прямолинейного, так и для криволинейного движения. Для этого необходимо, чтобы сила  была постоянной по модулю и все время направленной по касательной к траектории точки. В случае прямолинейной траектории сила
была постоянной по модулю и все время направленной по касательной к траектории точки. В случае прямолинейной траектории сила  , следовательно, должна быть все время направлена по траектории в одну и ту же сторону.
, следовательно, должна быть все время направлена по траектории в одну и ту же сторону.
Мощность
Мощность силы или работоспособность какого-либо источника силы часто оценивают той работой, которую он может совершить за единицу времени.
Итак, по определению, мощность
Учитывая (43) для элементарной работы, мощность  можно представить в виде
можно представить в виде

Таким образом, мощность равна скалярному произведению силы на скорость точки. Из формулы (48) получаем, что чем больше скорость, тем меньше сила при одной и той же мощности. Следовательно, если от источника силы с заданной мощностью нужно получить большую силу, то ее можно получить только при малой скорости. Так, например, когда железнодорожному локомотиву надо увеличить силу тяги, то для этого надо уменьшить скорость поезда.
В СИ единицей мощности является ватт: 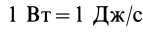 .
.
Примеры вычисления работы силы
Работа силы в общем случае зависит от характера движения точки приложения силы. Следовательно, для вычисления работы надо знать движение этой точки. Но в природе имеются силы и примеры движения, для которых работу можно вычислить сравнительно просто, зная начальное и конечное положение точки.
Рассмотрим работу силы тяжести и линейной силы упругости, изменяющейся по закону Гука, и вычисление работы силы, приложенной к какой-либо точке твердого тела в различных случаях его движения. В качестве простейших примеров движения укажем случаи, когда работа равна нулю. Так, работа любой силы равна нулю, если она приложена все время в неподвижной точке или в точках, скорость которых равна нулю, как, например, в случае, когда сила все время приложена в мгновенном центре скоростей при плоском движении тела или все время в точках, лежащих на мгновенной оси вращения, в случае вращения тела вокруг неподвижной точки. Эти случаи возможны в задачах, когда рассматривают работу силы трения в точке соприкосновения двух тел при отсутствии скольжения одного тела по другому. При этом работа силы трения равна нулю.
Рис. 61
Работа силы тяжести
Силу тяжести  материальной точки массой
материальной точки массой  вблизи поверхности Земли можно считать постоянной, равной
вблизи поверхности Земли можно считать постоянной, равной  , направленной по вертикали вниз. Если взять оси координат
, направленной по вертикали вниз. Если взять оси координат  , у которых ось
, у которых ось  направлена по вертикали вверх (рис. 61), то
направлена по вертикали вверх (рис. 61), то

Вычисляя работу  силы на перемещении от точки
силы на перемещении от точки  до точки
до точки  по формуле (46), имеем
по формуле (46), имеем
или

где  — высота опускания точки.
— высота опускания точки.
При подъеме точки высота  является отрицательной. Следовательно, в общем случае работа силы тяжести
является отрицательной. Следовательно, в общем случае работа силы тяжести  равна
равна

Работа силы тяжести равна произведению этой силы на высоту опускания (работа положительна) или высоту подъема (работа отрицательна). Из формулы (50) следует, что работа силы тяжести не зависит от формы траектории между точками  и
и  , и если эти точки совпадают, то работа силы тяжести равна нулю (случай замкнутого пути). Она равна нулю, если точки и лежат в одной и той же горизонтальной плоскости.
, и если эти точки совпадают, то работа силы тяжести равна нулю (случай замкнутого пути). Она равна нулю, если точки и лежат в одной и той же горизонтальной плоскости.
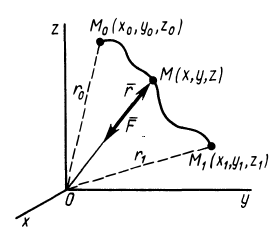
Рис. 62
Если имеем систему  материальных точек, то для каждой точки с массой
материальных точек, то для каждой точки с массой  будем иметь работу ее силы тяжести
будем иметь работу ее силы тяжести

где  и
и  — начальная и конечная координаты точки.
— начальная и конечная координаты точки.
Работа всех сил тяжести системы материальных точек

так как

где  — масса системы точек;
— масса системы точек;  и
и  — начальная и конечная координаты центра масс системы точек. Вводя обозначение для изменения высоты центра масс
— начальная и конечная координаты центра масс системы точек. Вводя обозначение для изменения высоты центра масс  , имеем
, имеем

Из (50′) следует, что для перемещений точек системы, при которых  , работа сил тяжести
, работа сил тяжести  .
.
Работа линейной силы упругости
Линейной силой упругости (или линейной восстанавливающей силой) называют силу, действующую по закону Гука (рис. 62):
где  — расстояние от точки равновесия, где сила равна нулю, до рассматриваемой точки
— расстояние от точки равновесия, где сила равна нулю, до рассматриваемой точки  ;
;  —постоянный коэффициент жесткости.
—постоянный коэффициент жесткости.
Выберем начало координат в точке равновесия  , тогда
, тогда

После этого работу на перемещении от точки  до точки
до точки  определим по формуле
определим по формуле
так как

где  .
.
Выполняя интегрирование, получаем

По этой формуле вычисляют работу линейной силы упругости пружины при перемещении по любому пути из точки , в которой ее удлинение (начальная деформация) равно  , в точку , где деформация соответственно равна
, в точку , где деформация соответственно равна  . В новых обозначениях (51) принимает вид
. В новых обозначениях (51) принимает вид

При перемещении из положения равновесия (пружина не деформирована), где  , в любое положение с деформацией
, в любое положение с деформацией  работа линейной силы упругости
работа линейной силы упругости

Работа линейной силы упругости на перемещении из состояния равновесия всегда отрицательна и равна половине произведения коэффициента жесткости на квадрат деформации. Из формулы (51) или (52) следует, что работа линейной силы упругости не зависит от формы перемещения и работа по любому замкнутому перемещению равна нулю. Она также равна нулю, если точки и лежат на одной сфере, описанной из точки равновесия.
Работа силы, приложенной к твердому телу
Получим формулы для вычисления элементарной и полной работы силы, приложенной в какой-либо точке твердого тела, которое совершает то или иное движение. Сначала рассмотрим поступательное и вращательное движения тела, а затем общий случай движения твердого тела.
При поступательном движении твердого тела все точки тела имеют одинаковые по модулю и направлению скорости (рис. 63). Следовательно, если сила  приложена к точке
приложена к точке  , то, так как
, то, так как  ,
,

где  —радиус-вектор произвольной точки твердого тела.
—радиус-вектор произвольной точки твердого тела.
На каком-либо перемещении полная работа

При вращении твердого тела вокруг неподвижной оси скорость точки  можно вычислить по векторной формуле Эйлера (рис. 64):
можно вычислить по векторной формуле Эйлера (рис. 64):
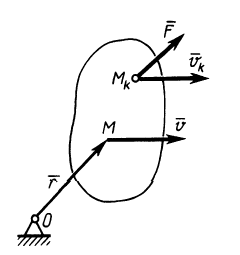
Рис. 63
Рис. 64
тогда элементарную работу силы  определим по формуле
определим по формуле

В смешанном векторном произведении, которое выражается в виде определителя, можно переставлять сомножители в круговом порядке:

и

так как

является моментом силы относительно точки  .
.
Учитывая, что  — момент силы относительно оси вращения
— момент силы относительно оси вращения  и
и  , окончательно получаем
, окончательно получаем

Таким образом, элементарная работа силы, приложенной к какой-либо точке тела, вращающегося вокруг неподвижной оси, равна произведению момента силы относительно оси вращения на дифференциал угла поворота тела.
Полная работа

В частном случае, если момент силы относительно оси вращения является постоянным, т. е.  , работу определяют по формуле
, работу определяют по формуле

где  — угол поворота тела, на котором вычисляют работу силы.
— угол поворота тела, на котором вычисляют работу силы.
Так как  , то мощность в случае вращения твердого тела вокруг неподвижной оси
, то мощность в случае вращения твердого тела вокруг неподвижной оси

Мощность силы, приложенной к вращающемуся вокруг неподвижной оси твердому телу, равна произведению угловой скорости тела на момент силы относительно оси вращения . тела.
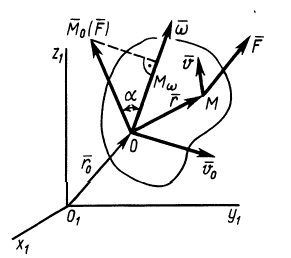
Рис. 65
Для свободного тела в общем случае движения скорость точки  , в которой приложена сила
, в которой приложена сила  (рис. 65),
(рис. 65),

следовательно,

Учитывая, что

имеем

Но так как  — момент силы относительно мгновенной оси относительного вращения вокруг точки
— момент силы относительно мгновенной оси относительного вращения вокруг точки  ,
,  — элементарный угол поворота вокруг этой оси, то окончательно получаем
— элементарный угол поворота вокруг этой оси, то окончательно получаем

Таким образом, элементарная работа силы, приложенной в какой-либо точке твердого тела, в общем случае движения складывается из элементарной работы на элементарном поступательном перемещении вместе с какой-либо точкой тела и на элементарном вращательном перемещении вокруг этой точки.
В случае вращения твердого тела вокруг неподвижной точки, выбрав эту точку за полюс , по (59) для элементарной работы имеем

Поворот на угол  следует рассматривать в каждый момент времени вокруг своей мгновенной оси вращения.
следует рассматривать в каждый момент времени вокруг своей мгновенной оси вращения.
Формулу (59) применяют и для плоского движения твердого тела, только в этом случае мгновенная ось относительного вращения перпендикулярна плоскости движения и проходит через произвольную точку тела.
При действии на твердое тело системы сил 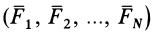 для элементарной работы силы
для элементарной работы силы  , согласно полученным формулам, имеем
, согласно полученным формулам, имеем

Элементарная работа системы сил

где

соответственно являются главным вектором и главными моментами системы сил относительно точки и мгновенной оси относительного вращения, проходящей через точку полюс. Таким образом,

т. е. элементарная работа системы сил, приложенных к свободному твердому телу в общем случае его движения, складывается из элементарной работы главного вектора системы сил на элементарном поступательном перемещении вместе с какой-либо точкой тела и элементарной работы главного момента этих сил относительно выбранной точки на элементарном вращательном перемещении вокруг этой точки.
Работа внутренних сил твердого тела
Докажем, что для твердого тела сумма работ внутренних сил равна нулю при любом его перемещении. Очевидно, достаточно доказать, что сумма элементарных работ всех внутренних сил равна нулю. Рассмотрим две любые точки твердого тела:  и
и  (рис. 66). Так как внутренние силы есть силы взаимодействия точек тела, то для этих двух точек
(рис. 66). Так как внутренние силы есть силы взаимодействия точек тела, то для этих двух точек

Введем единичный вектор  , направленный по силе
, направленный по силе  . Тогда
. Тогда

Сумма элементарных работ сил  и
и 

Рис. 66
Раскрывая скалярные произведения векторов в скобках, получаем

так как в кинематике твердого тела доказано, что проекции скоростей любых двух точек твердого тела на направление прямой линии, соединяющей эти точки, равны друг другу при любом движении твердого тела. В полученном выражении в скобках стоит разность этих проекций скоростей двух точек, т. е. величина, равная нулю.
Твердое тело можно считать состоящим из пар взаимодействующих точек, для каждой из которых сумма элементарных работ внутренних сил равна нулю.
Суммируя элементарные работы для всех пар точек, получаем  .
.
Как уже известно, главный вектор и главный момент всех внутренних сил для любой механической системы равны нулю. Сумма работ внутренних сил равна нулю только в случае твердого тела, а для любой механической системы в общем случае она не равна нулю.
В задачах в качестве механической системы часто рассматривают систему сочлененных твердых тел. При вычислении работы всех сил, приложенных к такой системе тел, очевидно, достаточно учесть работу внутренних сил в местах сочленения твердых тел. Если твердые тела сочленяются с помощью шарниров без трения, сумма работ таких двух внутренних сил равна нулю, так как внутренние силы в точке сочленения, как действие и противодействие, равны по модулю, но противоположны по направлению, а перемещение у точек приложения сил общее.
Таким образом, сочленение твердых тел с помощью шарниров без трения при вычислении работы внутренних сил не нарушает жесткости системы тел, так как сумма работ внутренних сил в этих шарнирах равна нулю при любых перемещениях системы сочлененных твердых тел. Систему сочлененных с помощью таких шарниров твердых тел при вычислении работы всех внутренних сил можно считать одним твердым телом. Это характерно и для случая сочленения системы твердых тел с помощью нерастяжимых нитей, канатов и т. п. В этом случае работа внутренних сил натяжений также равна нулю.
Кинетическая энергия
Кинетическая энергия точки и системы: Кинетической энергией материальной точки называют половину произведения массы точки на квадрат ее скорости, т.е.  или
или  , так как скалярный квадрат любого вектора равен квадрату модуля этого вектора. Кинетическая энергия является скалярной положительной величиной. В СИ единицей кинетической энергии является джоуль:
, так как скалярный квадрат любого вектора равен квадрату модуля этого вектора. Кинетическая энергия является скалярной положительной величиной. В СИ единицей кинетической энергии является джоуль:  .
.
Кинетической энергией системы  называют сумму кинетических энергий всех точек механической системы, т. е.
называют сумму кинетических энергий всех точек механической системы, т. е.

Кинетическая энергия как точки, так и системы не зависит от направления скоростей точек. Кинетическая энергия может быть равна нулю для системы только при условии, если все точки системы находятся в покое.
Вычисление кинетической энергии системы (теорема Кёнига)
Разложим движение механической системы на переносное поступательное вместе с центром масс системы и относительное по отношению к системе координат, движущейся поступательно вместе с центром масс. Аналогично тому, как это производилось при выводе формулы для кинетического момента при таком разложении абсолютного движения, для каждой точки системы  (см. рис. 57) имеем
(см. рис. 57) имеем
и соответственно
где  является относительной скоростью точки, так как подвижная система координат движется поступательно
является относительной скоростью точки, так как подвижная система координат движется поступательно  и, следовательно, полная производная по времени от
и, следовательно, полная производная по времени от  совпадает с локальной производной, равной относительной скорости точки.
совпадает с локальной производной, равной относительной скорости точки.
Подставляя значение скорости  в выражение кинетической энергии абсолютного движения системы, т. е. ее движения относительно системы координат
в выражение кинетической энергии абсолютного движения системы, т. е. ее движения относительно системы координат  , после очевидных преобразований получаем
, после очевидных преобразований получаем

Но

так как

Учитывая, что  —масса системы, и обозначая
—масса системы, и обозначая  второе слагаемое в (62), имеем
второе слагаемое в (62), имеем

где
Величина  является кинетической энергией относительного движения системы относительно системы координат, движущейся поступательно вместе с ее центром масс, или кинетической энергией системы относительно центра масс.
является кинетической энергией относительного движения системы относительно системы координат, движущейся поступательно вместе с ее центром масс, или кинетической энергией системы относительно центра масс.
Формула (63) выражает так называемую теорему Кёнига: кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы относительно центра масс.
Кинетическая энергия твердого тела
При поступательном движении твердого тела кинетическая энергия

так как при поступательном движении твердого тела скорости всех точек тела одинаковы, т. е.  , где
, где  — общая скорость для всех точек тела.
— общая скорость для всех точек тела.
Таким образом, кинетическая энергия твердого тела при поступательном движении вычисляется так же, как и для одной точки, у которой масса равна массе всего тела.
При вращении тела вокруг неподвижной оси кинетическую энергию можно вычислить, если учесть, что скорость какой-либо точки тела  можно выразить (см. рис. 50) как
можно выразить (см. рис. 50) как
где  — кратчайшее расстояние от точки до оси вращения;
— кратчайшее расстояние от точки до оси вращения;  — угловая скорость тела.
— угловая скорость тела.
Тогда
или

где  — момент инерции тела относительно оси вращения
— момент инерции тела относительно оси вращения  .
.
Следовательно, кинетическая энергия тела при вращательном движении вокруг неподвижной оси равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости тела.
Из сравнения (64) и (65) следует, что эти формулы подобны, только при вращательном движении аналогом массы является момент инерции тела относительно оси вращения, а скорости— угловая скорость тела. Такая аналогия между поступательным и вращательным движениями твердого тела может наблюдаться во многих формулах, относящихся к этим двум движениям.
При плоском движении твердого тела кинетическую энергию можно вычислить по теореме Кёнига. Так как в этом случае относительное движение относительно центра масс (точнее, относительно системы координат, движущейся поступательно вместе с центром масс) является вращением вокруг центра масс с угловой скоростью  , то
, то
где  — момент инерции тела относительно оси
— момент инерции тела относительно оси  , проходящей через центр масс тела перпендикулярно плоскости движения. Следовательно, на основании (63) для плоского движения тела имеем
, проходящей через центр масс тела перпендикулярно плоскости движения. Следовательно, на основании (63) для плоского движения тела имеем

Таким образом, при плоском движении тела кинетическая энергия складывается из кинетической энергии поступательного движения тела вместе с центром масс и кинетической энергии от вращения вокруг оси, проходящей через центр масс и перпендикулярной плоскости движения.
Учитывая, что  (
( — мгновенный центр скоростей), из (66), используя теорему Штейнера, получаем еще одну формулу для кинетической энергии твердого тела при плоском движении:
— мгновенный центр скоростей), из (66), используя теорему Штейнера, получаем еще одну формулу для кинетической энергии твердого тела при плоском движении:

где  — момент инерции тела относительно оси
— момент инерции тела относительно оси  , проходящей через мгновенный центр скоростей перпендикулярно плоскости движения,
, проходящей через мгновенный центр скоростей перпендикулярно плоскости движения,
Если механическая система состоит из нескольких твердых тел, то следует вычислить кинетическую энергию каждого тела, а затем полученные кинетические энергии сложить. Так определяется кинетическая энергия системы тел.
Теорема об изменении кинетической энергии точки
Для материальной точки массой  , движущейся под действием силы
, движущейся под действием силы  , основной закон динамики можно представить в виде
, основной закон динамики можно представить в виде
Умножая обе части этого соотношения скалярно на дифференциал радиуса-вектора точки  , имеем
, имеем
или
где  — скорость точки.
— скорость точки.
Учитывая, что  — элементарная работа, получаем
— элементарная работа, получаем
Так как

то окончательно

Формула (67) выражает теорему об изменении кинетической энергии для точки в дифференциальной форме: дифференциал кинетической энергии точки равен элементарной работе силы, действующей на точку.
Если обе части (67) разделить на  и учесть, что
и учесть, что  —мощность, то теорему можно также выразить в виде
—мощность, то теорему можно также выразить в виде

Производная по времени от кинетической энергии точки равна мощности, подводимой к этой точке.
Интегрируя обе части (67) от точки  до точки
до точки  (см. рис. 60), получаем теорему об изменении кинетической энергии точки в конечной форме:
(см. рис. 60), получаем теорему об изменении кинетической энергии точки в конечной форме:

т. е. изменение кинетической энергии точки на каком-либо перемещении равно работе силы, действующей на точку на том же перемещении.
- Заказать решение задач по теоретической механике
Пример 1. Тело, имеющее силу тяжести  , падает без начальной скорости на пружину с высоты
, падает без начальной скорости на пружину с высоты  . Определить наибольшее обжатие пружины
. Определить наибольшее обжатие пружины  , если статическое сжатие ее под действием силы тяжести этого тела равно
, если статическое сжатие ее под действием силы тяжести этого тела равно  . Массой пружины пренебречь (рис. 67).
. Массой пружины пренебречь (рис. 67).
Решение. Применим к движению тела теорему об изменении кинетической энергии точки

приняв за начальное положение тела начало его падения с высоты , а за конечное — момент максимального обжатия пружины. Изменение кинетической энергии за этот промежуток времени равно нулю, так как  и при наибольшем сжатии пружины
и при наибольшем сжатии пружины  . Следовательно, работа
. Следовательно, работа  . На тело после его соприкосновения с пружиной действуют две силы: сила тяжести тела
. На тело после его соприкосновения с пружиной действуют две силы: сила тяжести тела  и сила упругости пружины. Сила
и сила упругости пружины. Сила  совершает работу на перемещении
совершает работу на перемещении  , сила упругости — на перемещении
, сила упругости — на перемещении  . Следовательно,
. Следовательно,
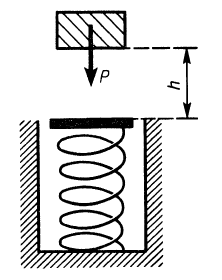
Рис. 67
Но так как в положении статического равновесия  , то
, то  . Поэтому
. Поэтому  или
или
Решая это квадратное уравнение, имеем

Знак плюс перед корнем выбран потому, что  . При
. При  наибольшее обжатие пружины
наибольшее обжатие пружины  , т. е. при динамическом действии груза на пружину ее наибольшее обжатие в два раза больше статического обжатия.
, т. е. при динамическом действии груза на пружину ее наибольшее обжатие в два раза больше статического обжатия.
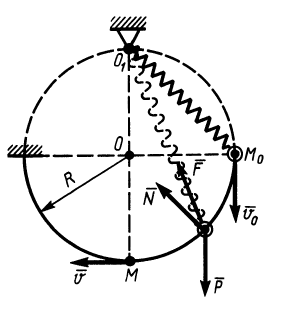
Рис. 68
Пример 2. Грузу с силой тяжести  , подвешенному в точке
, подвешенному в точке  на пружине, статическое удлинение которой под действием силы тяжести
на пружине, статическое удлинение которой под действием силы тяжести  равно
равно  , сообщена начальная скорость
, сообщена начальная скорость  из положения
из положения  вертикально вниз (рис. 68).
вертикально вниз (рис. 68).
Определить скорость груза в положении  , если груз, принимаемый за точку, скользит по кольцу радиусом
, если груз, принимаемый за точку, скользит по кольцу радиусом  без трения,
без трения,  и естественная длина пружины равна .
и естественная длина пружины равна .
Решение. Применим к движению груза теорему об изменении кинетической энергии, приняв за начальное положение груза и конечное — . Получим
Работу совершают сила тяжести груза и сила упругости пружины. Нормальная реакция кольца  все время перпендикулярна перемещению, и ее работа равна нулю. Следовательно,
все время перпендикулярна перемещению, и ее работа равна нулю. Следовательно,

В рассматриваемом случае

поэтому

По теореме об изменении кинетической энергии имеем
и
Теорема об изменении кинетической энергии системы
Приложив к точкам системы все внешние и внутренние силы, для каждой точки системы можно выразить теорему об изменении кинетической энергии (67) в форме

Суммируя правые и левые части этих соотношений по всем точкам системы и вынося знак дифференциала за знак суммы, получаем

или

где кинетическая энергия системы
элементарная работа внешних и внутренних сил соответственно будет

Формула (69) и выражает теорему об изменении кинетической энергии системы в дифференциальной форме: дифференциал от кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему.
Если обе части (69) проинтегрировать между двумя положениями системы — начальным и конечным, в которых соответственно кинетическая энергия  и
и  , то, изменяя порядок суммирования и интегрирования, имеем
, то, изменяя порядок суммирования и интегрирования, имеем
или

где  —работа внешней силы для точки системы
—работа внешней силы для точки системы  при ее перемещении из начального положения
при ее перемещении из начального положения  в конечное положение
в конечное положение  — соответственно работа внутренней силы, действующей на точку
— соответственно работа внутренней силы, действующей на точку  .
.
Формула (70) выражает теорему об изменении кинетической энергии системы в конечной или интегральной форме: изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек системы при том же перемещении системы.
Частный случай: Для абсолютно твердого тела сумма работ всех внутренних сил системы равна нулю:
Следовательно, теорему об изменении кинетической энергии, например, в конечной форме можно представить в виде

Изменение кинетической энергии твердого тела при каком-либо перемещении равно сумме работ всех внешних сил, действующих на тело, на соответствующих перемещениях точек тела при том же перемещении твердого тела.
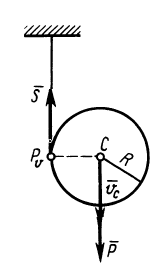
Рис. 69
Таким образом, в отличие от рассмотренных других общих теорем динамики системы в теорему об изменении кинетической энергии могут входить внутренние силы. Они не входят в эту теорему в случае абсолютно твердого тела.
Пример 1. В маятнике Максвелла однородный цилиндр силой тяжести  и радиусом
и радиусом  падает вниз без начальной скорости, разматывая нить, намотанную на цилиндр в его среднем сечении.
падает вниз без начальной скорости, разматывая нить, намотанную на цилиндр в его среднем сечении.
Определить скорость оси цилиндра в зависимости от высоты ее опускания  (рис. 69).
(рис. 69).
Решение. По теореме об изменении кинетической энергии цилиндра как твердого тела имеем
Так как в начальный момент времени цилиндр покоится, то  . Цилиндр совершает плоское движение. Его кинетическая энергия в момент достижения высоты
. Цилиндр совершает плоское движение. Его кинетическая энергия в момент достижения высоты 

Поэтому
Внешними силами являются сила тяжести и сила натяжения нити  . Сила
. Сила  все время приложена в мгновенном центре скоростей цилиндра, имеющем скорость равную нулю. Работа силы тоже равна нулю. Следовательно,
все время приложена в мгновенном центре скоростей цилиндра, имеющем скорость равную нулю. Работа силы тоже равна нулю. Следовательно,
Подставляя вычисленные величины в теорему об изменении кинетической энергии, получаем
Пример 2. Груз  , имеющий силу тяжести
, имеющий силу тяжести  , с помощью нити, переброшенной через блок
, с помощью нити, переброшенной через блок  , приводит в движение каток
, приводит в движение каток  , катящийся без скольжения по горизонтальной плоскости (рис. 70). Блок
, катящийся без скольжения по горизонтальной плоскости (рис. 70). Блок  и каток
и каток  — однородные диски радиусом
— однородные диски радиусом  . Их силы тяжести равны . Коэффициент трения качения катка
. Их силы тяжести равны . Коэффициент трения качения катка  . Трением в осях катка и блока, а также массой нити пренебречь.
. Трением в осях катка и блока, а также массой нити пренебречь.
Определить скорость груза  в зависимости от его высоты опускания.
в зависимости от его высоты опускания.
В начальный момент система покоится.
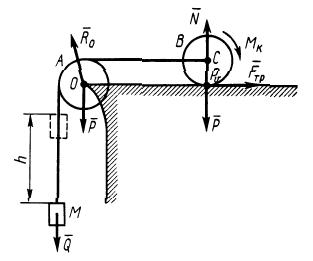
Рис. 70
Решение. По теореме об изменении кинетической энергии системы, состоящей из груза, нити, блока и катка, имеем

где  , так как вначале система покоилась. Обозначив
, так как вначале система покоилась. Обозначив  ,
,  и
и  кинетические энергии груза, блока и катка соответственно после опускания груза на высоту
кинетические энергии груза, блока и катка соответственно после опускания груза на высоту  , получаем
, получаем

Но

Следовательно,

Так как работа внутренних сил натяжений нити равна нулю, то вообще  для всей системы твердых тел, соединенных нитью. Работа сил тяжести блока и реакции оси
для всей системы твердых тел, соединенных нитью. Работа сил тяжести блока и реакции оси  равны нулю, так как эти силы приложены в неподвижной точке
равны нулю, так как эти силы приложены в неподвижной точке  . Сила тяжести катка
. Сила тяжести катка  перпендикулярна перемещению, а силы
перпендикулярна перемещению, а силы  и
и  приложены в мгновенном центре скоростей и, следовательно, работа их равна нулю. Работу производят сила
приложены в мгновенном центре скоростей и, следовательно, работа их равна нулю. Работу производят сила  и пара сил с моментом
и пара сил с моментом  , препятствующим качению катка по плоскости. Имеем
, препятствующим качению катка по плоскости. Имеем
где  — угол поворота катка при опускании груза
— угол поворота катка при опускании груза  на
на  и
и  .
.
Так как

то
Подставляя значения полученных величин в теорему об изменении кинетической энергии, получаем
Заметим, что груз имеет не только силу тяжести , совершающую работу, но он еще обладает массой  и, следовательно, имеет кинетическую энергию. И работа силы тяжести, и кинетическая энергия груза входят в теорему об изменении кинетической энергии.
и, следовательно, имеет кинетическую энергию. И работа силы тяжести, и кинетическая энергия груза входят в теорему об изменении кинетической энергии.
Теорема об изменении кинетической энергии в относительном движении
Теорема об изменении кинетической энергии материальной точки. Пусть точка  совершает переносное движение вместе с подвижной системой координат
совершает переносное движение вместе с подвижной системой координат  относительно основной системы координат
относительно основной системы координат  и относительное движение по отношению к системе координат
и относительное движение по отношению к системе координат  (рис. 71). Абсолютным движением точки
(рис. 71). Абсолютным движением точки  является ее сложное движение относительно системы координат . Дифференциальное уравнение относительного движения точки в векторной форме можно представить в виде
является ее сложное движение относительно системы координат . Дифференциальное уравнение относительного движения точки в векторной форме можно представить в виде

где  — сила инерции переносного движения точки;
— сила инерции переносного движения точки;  — сила инерции Кориолиса.
— сила инерции Кориолиса.
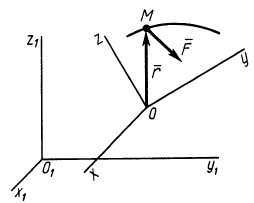
Рис. 71
Вывод теоремы об изменении кинетической энергии для точки в относительном движении произведем так же, как и вывод аналогичной теоремы в абсолютном движении, умножив обе части (72) скалярно на вектор элементарного относительного перемещения  , и преобразуем левую часть полученного выражения. Значок
, и преобразуем левую часть полученного выражения. Значок  над дифференциалом радиуса-вектора
над дифференциалом радиуса-вектора  и других векторов указывает, что при дифференцировании надо брать изменение соответствующего вектора относительно подвижной системы координат
и других векторов указывает, что при дифференцировании надо брать изменение соответствующего вектора относительно подвижной системы координат  . Таким образом,
. Таким образом,

В правую часть входят элементарные работы сил  и
и  на относительном перемещении . Оказывается, что элементарная работа силы инерции Кориолиса на относительном элементарном перемещении всегда равна нулю, так как эта сила перпендикулярна относительной скорости
на относительном перемещении . Оказывается, что элементарная работа силы инерции Кориолиса на относительном элементарном перемещении всегда равна нулю, так как эта сила перпендикулярна относительной скорости  и, следовательно, перпендикулярна относительному перемещению
и, следовательно, перпендикулярна относительному перемещению  . В выражение силы инерции Кориолиса входит векторное произведение
. В выражение силы инерции Кориолиса входит векторное произведение  , а оно всегда перпендикулярно каждому из векторов сомножителей, в частности
, а оно всегда перпендикулярно каждому из векторов сомножителей, в частности  .
.
Итак, теорема об изменении кинетической энергии точки в дифференциальной форме имеет вид

Теорема об изменении кинетической энергии в относительном движении точки выражается так же, как и в абсолютном движении, только к элементарной работе приложенной силы добавляют элементарную работу силы инерции переносного движения на относительном перемещении.
Теорема об изменении кинетической энергии системы
Для системы рассмотрим наиболее важный случай, когда в качестве переносного движения берется поступательное движение системы вместе с центром масс и, следовательно, кинетическую энергию системы в абсолютном движении можно вычислить на основании теоремы Кёнига (63):  .
.
Теорему об изменении кинетической энергии системы для абсолютного движения (см. рис. 56) можно представить в виде

Так как
и, следовательно,
то, заменяя в (74)  и
и  их значениями, получаем
их значениями, получаем

По свойству внутренних сил,  .
.
Если теорему об изменении кинетической энергии для центра масс выразить так же, как и для точки, у которой масса равна массе всей системы, и эта точка находится под действием всех внешних сил, действующих на систему, то
Отбросив в (75) эти члены, получим следующую теорему об изменении кинетической энергии системы в относительном движении по отношению к системе координат, движущейся поступательно вместе с центром масс:

Сравнивая (76) с (74), видим, что теорема об изменении кинетической энергии в относительном движении системы по отношению к системе координат, движущейся поступательно вместе с центром масс системы, формулируется так же, как и для абсолютного движения системы.
- Потенциальное силовое поле
- Закон сохранения механической энергии
- Принцип Даламбера
- Динамические реакции при вращении твердого тела вокруг неподвижной оси
- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
- Теоремы об изменении количества движения и о движении центра масс
- Теорема об изменении кинетического момента
