Теория метода и описание установки
Изучение затухающих колебаний физического маятника
Методические указания к лабораторной работе №5 по дисциплине
Механика. Молекулярная физика и термодинамика»
для студентов специальностей 150106, 150105, 150201, 150404, 2005030.
Составитель: Мигранова С.Г.
Методические указания к лабораторной работе №5 по дисциплине «Общая физика. Механика. Молекулярная физика и термодинамика» для студентов специальностей 150106, 150105, 150201, 150404, 2005030. Магнитогорск: МГТУ, 2012.
Рецензент: Дубосарская Ю.М.
Лабораторная работа № 5
Изучение затухающих колебаний физического маятника
Цель работы: изучение затухающих колебаний, определение основных характеристик затухающих колебаний.
Приборы и принадлежности: физический маятник, постоянный магнит, секундомер, весы.
Краткая теория
Затухающие колебания.Затуханием колебаний называется постепенное ослабление колебаний с течением времени, обусловленной потерей энергии колебательной системой. Затухание колебаний в механических системах вызывается в основном трением, сопротивлением среды и возбуждением в ней волн.
Найдем дифференциальное уравнение, описывающее свободные затухающие колебания физического маятника. Если колеблющееся тело нельзя представить как материальную точку, маятник называют физическим. Движение маятника описывается уравнением динамики вращательного движения , где – результирующий момент сил, действующих на систему, – момент инерции системы, – угловое ускорение: . На физический маятник действует момент силы тяжести и момент сил сопротивления, при малых отклонениях пропорциональный угловой скорости .
При малых колебаниях , тогда
(1) – дифференциальное уравнение затухающих колебаний физического маятника.
Введем обозначения физических характеристик:
– циклическая частота свободных незатухающих колебаний маятника,
– циклическая частота затухающих колебаний, – период затухающих колебаний.
(2) -уравнение затухающих колебаний, полученное при выполнении условий: отклонения маятника малы, момент сил сопротивления пропорционален скорости, выполняется неравенство .
Решение дифференциального уравнения затухающих колебаний имеет следующий вид:
, (3)
где (4) – амплитуда затухающих колебаний, (5) – коэффициент затухания.
График зависимости при начальной фазе имеет вид экспоненты, причем, чем меньше коэффициент β, тем амплитуда убывает слабее.
Затухающие колебания – непериодические, т.к. в начальный момент никогда не повторяется. Однако обращается в ноль и достигает max и min через один и тот же промежуток времени .
Промежуток времени , в течение которого амплитуда затухающих колебаний уменьшается в е раз, называется временем релаксации.
(6)
Логарифмическим декрементом затухания называется безразмерная величина , равная логарифму отношения амплитуды в момент времени к амплитуде через период:
, (7), где – число колебаний, в течение которых амплитуда уменьшается в е раз.
Добротностью колебательной системы называется безразмерная величина , равная , умноженным на отношение энергии в момент времени к разности энергий через период:
Т.к. полная энергия пропорциональна квадрату амплитуды, т.е. , то
При малых значениях логарифмического декремента затухания (
колебаний. График зависимости от будет иметь вид прямой, проходящей через начало координат. На графике легко определяются по точке пересечения с горизонтальной прямой, соответствующей значению . Если график не пресекается с ординатой, равной единице, то можно заменить 1 на 0,5, но тогда полученное значение нужно умножить на 2.
Затухания и приведенной длины физического маятника
Литература
1. Детлаф А.А., Яворский Б.М. Курс физики. ‑ М., 1989. С. 298 – 314.
2. Методические указания к выполнению лабораторных работ по физике. Раздел «Механика материальной точки». / МТИПП. ‑ М., 1990. С 18 – 31.
Введение
Всякое движение, в котором наблюдается повторяемость во времени значений физических величин, определяющих это движение, называется колебательным движением.
Гармоническим колебательным движением называется такое движение, при котором величина, характеризующая состояние системы, изменяется со временем по закону синуса или косинуса, т.е. уравнение гармонических колебаний имеет вид:
 , (1)
, (1)
где x – смещение от положения равновесия;
A – амплитуда колебаний – наибольшее смещение от положения равновесия;
 – фаза колебаний;
– фаза колебаний;
jо – начальная фаза колебаний;
wо – собственная циклическая частота колебаний – это число колебаний за 2p секунд.
Время одного полного колебания Т называется периодом колебаний. Количество колебаний в единицу времени называется частотой колебаний  . Между периодом, частотой и циклической частотой существует связь:
. Между периодом, частотой и циклической частотой существует связь:
 (2)
(2)
Если выражение (1) продифференцировать по времени, то получим закон изменения скорости от времени
 (3)
(3)
Продифференцировав (3) еще раз по времени, найдем закон зависимости ускорения от времени:
 (4)
(4)
учитывая, что  , получим
, получим
 (5)
(5)
Последнее уравнение показывает, что при гармонических колебаниях ускорение пропорционально величине смещения и всегда направлено противоположно смещению.
Примерами систем, в которых могут возникать гармонические колебания, могут служить мятники: пружинный, математический и физический.
Рассмотрим пружинный маятник – грузик на идеально упругой пружине при отсутствии трения. На примере его движения получим дифференциальное уравнение гармонических колебаний.
Чтобы система (маятник) совершала гармонические колебания, необходимо воздействие на нее упругой или квазиупругой силы, изменяющейся при смещении системы от положения равновесия по закону:
 (6)
(6)

Эта сила, пропорциональна смещению и всегда направлена к положению равновесия. Применим второй закон Ньютона к пружинному маятнику.
Возвращающая сила  , действуя на тело массой m, создает ускорение а. Согласно второму закону Ньютона
, действуя на тело массой m, создает ускорение а. Согласно второму закону Ньютона

Колебания происходят вдоль оси х (рис.1), поэтому спроецируем векторное уравнение на ось ОХ :
Поделив все члены на m, перенеся их в одну часть равенства, обозначив  , получим окончательный вид дифференциального уравнения гармонических колебаний пружинного маятника:
, получим окончательный вид дифференциального уравнения гармонических колебаний пружинного маятника:
 или
или  , (7)
, (7)
где  – собственная частота колебаний пружинного маятника;
– собственная частота колебаний пружинного маятника;
 – период колебаний (8)
– период колебаний (8)
Решением уравнения (7) является уравнение (1).
Рассмотрим математический маятник – это материальная точка, подвешенная на невесомой и нерастяжимой нити длиною  (рис. 2). На грузик m действуют сила тяжести
(рис. 2). На грузик m действуют сила тяжести  и сила натяжения нити
и сила натяжения нити  . Равнодействующая этих сил
. Равнодействующая этих сил  «похожа» на силу упругости тем, что она пропорциональна величине смещения и направлена к положению равновесия, но сила
«похожа» на силу упругости тем, что она пропорциональна величине смещения и направлена к положению равновесия, но сила  не имеет упругой природы. Силу называют квазиупругой силой. Колебательные движения математического маятника можно рассматривать как часть вращательного. Для его описания применим основной закон вращательного движения
не имеет упругой природы. Силу называют квазиупругой силой. Колебательные движения математического маятника можно рассматривать как часть вращательного. Для его описания применим основной закон вращательного движения
 , (9)
, (9)
где M – момент возвращающей силы;
I – момент инерции материальной точки;
e

– угловое ускорение.



При условии малых колебаний  заменим
заменим  ;
;  , x – смещение точки от положения равновесия.
, x – смещение точки от положения равновесия.
Подставим полученные выражения в формулу
Знак « – » имеет то же значение, что и в случае (6)
 или
или

Поделив все члены на , перенеся их в одну сторону, обозначив  , получим окончательный вид дифференциального уравнения гармонических колебаний математического маятника:
, получим окончательный вид дифференциального уравнения гармонических колебаний математического маятника:
 или , (10)
или , (10)
где  – собственная частота колебаний;
– собственная частота колебаний;
– период колебаний. (11)
Из формулы (11) видно, что период колебаний математического маятника не зависит от его массы, а определяется лишь его длиной и ускорением свободного падения.
Решением уравнения (10) является уравнение (1).

Рассмотрим физический маятник – это абсолютно твердое тело, которое может свободно вращаться вокруг оси О, не проходящей через его центр масс (рис. 3).
На физический маятник действует сила тяжести и сила реакции опоры  . При отклонении физического маятника от положения равновесия на угол j, равнодействующая этих сил является квазиупругой возвращающей силой
. При отклонении физического маятника от положения равновесия на угол j, равнодействующая этих сил является квазиупругой возвращающей силой

Колебания физического маятника рассматриваем как часть вращательного движения вокруг оси О и для его описания применяем основное уравнение динамики вращательного движения
,
где М – момент возвращающей силы;
I – момент инерции твердого тела, относительно оси О;
e – угловое ускорение.

Знак « – » имеет тот же смысл, что и в случае (6)

В случае малых колебаний заменим ,  , х – смещение маятника от положения равновесия.
, х – смещение маятника от положения равновесия.
Сделав подстановку, получили
 или
или

Поделив все члены равенства на  , перенесем в одну сторону и обозначим
, перенесем в одну сторону и обозначим  , получим
, получим
 или (12)
или (12)
дифференциальное уравнение гармонических колебаний физического маятника.
 – собственная частота колебаний
– собственная частота колебаний
Период колебаний физического маятника выражается формулой
 (13)
(13)
Приведенной длиной физического маятника называется длина такого  математического маятника, у которого его период колебаний совпадает с периодом колебаний данного физического маятника.
математического маятника, у которого его период колебаний совпадает с периодом колебаний данного физического маятника.
 (14)
(14)
Решением уравнения (12) является уравнение (1).
Итак, гармонические колебания, возникающие в идеальных колебательных системах, не зависимо от вида маятника, описываются одинаковыми уравнениями (7), (10), (12), которые имеют решение (1).
В реальных колебательных системах всегда присутствуют силы трения, на преодоление которых будет тратиться собственная энергия системы. Если энергия не будет восполняться за счет работы внешних сил, то колебания будут затухать, т.е. амплитуда их будет уменьшаться с течением времени.
При малых смещениях от положения равновесия на систему будут действовать:
1) квазиупругая возвращающая сила ;
2) сила сопротивления, пропорциональная скорости и направленная противоположно ее направлению  ,
,
где r – коэффициент сопротивления.
Применим второй закон Ньютона к описанию движения колеблющейся системы

В проекции на ось ОХ, это уравнение будет выглядеть как  , если подставить
, если подставить  и
и  , получим
, получим

Поделив все члены равенства на m, перенеся их в одну сторону, обозначив  ,
,  , получим дифференциальное уравнение затухающих колебаний.
, получим дифференциальное уравнение затухающих колебаний.
 или
или  (15)
(15)
Решением уравнения (15) будет периодическая функция с убывающей амплитудой
 , (16)
, (16)
где Ao – наибольшее отклонение системы от положения равновесия;
 – коэффициент затухания;
– коэффициент затухания;
 – закон убывания амплитуды;
– закон убывания амплитуды;

 – частота затухающих колебаний.
– частота затухающих колебаний.
Уменьшение амплитуды колебаний за один период характеризует декремент затухания

В качестве меры затухания берут величину натурального логарифма декремента затухания
 (17)
(17)
d называют логарифмическим декрементом затухания.
Для получения незатухающих колебаний необходимо воздействовать на систему дополнительной переменной внешней силой, работа которой непрерывно восполняла бы убыль энергии из-за наличия сил трения. Эта переменная сила называется вынуждающей, а колебания – вынужденными.
Пусть вынуждающая сила меняется по гармоническому закону

При этом условии уравнение второго закона Ньютона в случае вынужденных колебаний будет иметь вид

Поделим все члены равенства на m, обозначим ; ,  , получим дифференциальное уравнение вынужденных колебаний
, получим дифференциальное уравнение вынужденных колебаний
 или
или  (18)
(18)
Решением этого уравнения является уравнение вида:
 , (19)
, (19)
где амплитуда установившихся колебаний имеет вид
 ,
,
а начальная фаза может быть определена из условия

Амплитуда колебаний зависит от частоты вынуждающей силы. Если затухание существует  , то амплитуда колебаний достигнет наибольшего значения при частоте
, то амплитуда колебаний достигнет наибольшего значения при частоте  вынуждающей силы, совпадающей с частотой незатухающих колебаний wо:
вынуждающей силы, совпадающей с частотой незатухающих колебаний wо:
Явление возрастания амплитуды вынужденных колебаний при приближении частоты вынуждающей силы к значению называется резонансом. Соответственно величина называется резонансной циклической частотой, а кривые зависимости  – резонансными кривыми (рис. 5).
– резонансными кривыми (рис. 5).
Форма резонансных кривых зависит от величины коэффициента затухания a. С увеличением a резонансные кривые становятся более пологими, уменьшается значение максимума амплитуды
Рис. 5

Описание установки и метода измерений
Прибор для изучения законов колебательного движения представляет собой комбинацию двух связанных маятников: физического 1 и математического 2 (рис.6). Связь маятников осуществляется при помощи вилки 3, жестко связанной с физическим маятником, в ушко которого продернута нить математического маятника. Длина математического маятника может быть измерена на требуемую величину путем перемещения нити с помощью фиксируемого ползунка 4, закрепленного на линейке 5. Положение ползунка на
этой линейке позволяет задать необходимую длину математического маятника. Амплитуда колебаний обоих маятников определяется по шкале 6.

Для увеличения затухания на физическом маятнике может быть закреплена тормозящая пластина 7.
Порядок выполнения и обработка результатов измерений
1. Определение логарифмического декремента затухания
1. Убирают математический маятник (для этого можно поднять шарик или отвести его в сторону).
2. На физическом маятнике закрепляют тормозящую пластину 7.
3. Отклоняют физический маятник до заданной начальной амплитуды Ao, отпускают его и одновременно включают секундомер. Фиксируют число полных колебаний n и промежуток времени t, по прошествии которого амплитуда принимает значение An.
4. Полученные результаты заносят в табл. 1.
5. Определяют период T физического маятника по формуле  ,
,
где t – время, n – число полных колебаний.
6. Вычисляют логарифмический декремент затухания по формуле:

и коэффициент затухания по формуле:

7. Вычисляются относительные и абсолютные погрешности при определении d и a. Все результаты заносятся в табл. 1.
| № п/п | Ao, дел | An, дел | n, | t, с | T, с | Tср, с | DT, с | d | dср | Dd | a, с -1 | aср, с -1 | Da, с -1 |
Ao – начальная амплитуда; An – конечная амплитуда;
n – число колебаний; t – время колебаний;
Т – период колебаний; a – коэффициент затухания;
d – логарифмический декремент затухания.
2. Снятие резонансной кривой
1. Выводят из зацепления математический маятник.
2. Устанавливают начальную длину математического маятника (максимальную или минимальную).
3. Отводят физический маятник на 5 – 6 делений от положения равновесия и дают ему свободно качаться.
Наблюдая возникновение колебаний математического маятника, фиксируют по шкале 6 максимальное значение угла отклонения при заданной длине маятника и заносят в табл. 2 результаты.
4. Изменяя длину маятника последовательно на 10 см, повторяют опыт, проходя весь интервал возможных длин. На участке, где начинает обнаруживаться явление резонанса, изменение длины уменьшают до 5 см. Заносят показания в табл. 2.
5. Строят график зависимости угла отклонения математического маятника от его длины  . По графику определяют резонансное значение
. По графику определяют резонансное значение  и сравнивают его величину с
и сравнивают его величину с  – приведенной длиной физического маятника, определяемой по формуле:
– приведенной длиной физического маятника, определяемой по формуле:

с использованием численного значения T по результатам предыдущего опыта.
Делаются соответствующие выводы.
1. Что мы называем математическим, физическим маятником?
2. Напишите уравнение гармонических колебаний.
3. Выведите дифференциальное уравнение затухающих колебаний.
4. Выведите период колебаний математического и физического маятников.
5. Дайте определение логарифмического декремента затухания. Что характеризует логарифмический декремент затухания?
6. Выведите дифференциальное уравнение вынужденных колебаний.
7. Дайте объяснение явления механического резонанса.
Курсовая работа: Колебания маятника с различными механизмами затухания
Сейчас уже невозможно проверить легенду о том, как Галилей, стоя на молитве в соборе, внимательно наблюдал за качением бронзовых люстр. Наблюдал и определял время, затраченное люстрой на движение туда и обратно. Это время потом назвали периодом колебаний. Часов у Галилея не было, и, чтобы сравнить период колебаний люстр, подвешенных на цепях разной длины, он использовал частоту биения своего пульса.
Маятники используют для регулировки хода часов, поскольку любой маятник имеет вполне определенный период колебаний. Маятник находит также важное применение в геологической разведке. Известно, что в разных местах земного шара значения g различны. Различны они потому, что Земля – не вполне правильный шар. Кроме того, в тех местах, где залегают плотные породы, например некоторые металлические руды, значение g аномально высоко. Точные измерения g с помощью математического маятника иногда позволяют обнаружить такие месторождения.
Целью данной курсовой работы является изучение колебаний маятника с различными механизмами затухания на примерах физического и пружинного маятников, где физический маятник – тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, не проходящей через центр тяжести тела, а пружинный маятник может быть осуществлен в виде груза массой m и невесомой пружины жесткостью k.
Реализовать поставленную цель можно решив ряд задач:
– определение исходных теоретических положений;
– изучение и анализ литературы, посвященной данным проблемам;
Объектом данной курсовой работы является маятник. Предметом – колебания маятника с различными механизмами затухания.
Для решения постановленных задач использовались научные труды следующих авторов: Андронова А.А., Витта А.А., Хайкина С.Э., Анищенко В.С., Боголюбова Н.Н., Митропольского Ю.А., Владимирова С.Н., Майдановского А.С., Новикова С.С., Горелика Г.С., Дмитриева А.С., Кислова В.Я., Капранова М.В., Кулешева В.Н., Уткина Г.М., Ланда П.С., Мигулина В.В., Медведева В.И., Неймарка Ю.И., Рабиновича М.И., Трубецкова Д.И. и некоторых других.
1. Уравнения собственных затухающих колебаний маятника
1.1 Общие характеристики колебаний
Колебаниями называются процессы, которые характеризуются определенной повторяемостью во времени. Колебательные процессы широко распространены в природе и технике, например качания маятника часов, переменный электрический ток и т.д. При колебательном движении маятника изменяется координата центра масс, в случае переменного тока колеблются напряжение и сила тока. Физическая природа колебаний может быть разной, однако различные колебательные процессы описываются одинаковыми характеристиками и одинаковыми уравнениями.[1] Далее рассмотрим затухающие колебания.
Затухающими колебаниями называют собственные колебания, амплитуда А которых убывает со временем t по закону экспоненты А(t)=Аоexp (-?t) (? – показатель затухания из-за диссипации энергии благодаря силам вязкого трения для механических затухающих колебаний и омическому сопротивлению для электромагнитных затухающих колебаний). Количественно затухающие колебания характеризуются декрементом затухания ?, добротностью Q = ?/? и временем затухания ? = 1/?, за которое амплитуда затухающих колебаний убывает в e = 2,73 раза.[2]
Затухание колебаний, уменьшение интенсивности колебаний с течением времени, обусловлено потерей энергии колебательной системой. Простейшим случаем уменьшения энергии колебания является превращение ее в тепло вследствие трения в механических системах и сопротивления в электрических системах. В последних, затухание колебаний происходит также вследствие излучения электромагнитной энергии. Закон затухания колебаний определяется характером потерь энергии и другими свойствами системы. Наиболее изученным является случай, когда затухание колебаний обусловлено уменьшением энергии, пропорциональным квадрату скорости движения в механической системе или соответственно квадрату силы тока в электрической системе, это справедливо для линейных систем. В этом случае затухание колебаний имеет экспоненциальный характер, т.е. размахи колебаний убывают по закону геометрической прогрессии.
Потери энергии в системе, вызывая затухание колебаний, нарушают их периодичность, поэтому затухающие колебания не являются периодическим процессом и, строго говоря, к ним неприменимо понятие периода или частоты. Однако, когда затухание мало, состояния в системе приблизительно повторяются и можно условно пользоваться понятием периода как промежутка времени между двумя последующими прохождениями колеблющейся физической величины (тока, напряжения, размаха колебаний маятника и т.д.) в одну и ту же сторону через максимальное значение. Оценку относительного уменьшения амплитуды колебаний за период дает логарифмический декремент затухания. Скорость затухание колебаний связана с добротностью колебательной системы.
Декремент затухания – количественная характеристика быстроты затухания колебаний. Декремент затухания d равен натуральному логарифму отношения двух последующих максимальных отклонений х колеблющейся величины в одну и ту же сторону: .
Декремент затухания – величина, обратная числу колебаний, по истечении которых амплитуда убывает в е раз. Например, если d=0,01, то амплитуда уменьшится в е раз после 100 колебаний. Декремент затухания характеризует число периодов, в течение которых происходит затухание колебаний, а не время такого затухания. Полное время затухания определяется отношением Т/d.[3]
Добротность колебательной системы, отношение энергии, запасенной в колебательной системе, к энергии, теряемой системой за один период колебания. Добротность характеризует качество колебательной системы, т.к. чем больше Добротность колебательной системы, тем меньше потери энергии в системе за одно колебание. Добротность колебательной системы Q связана с логарифмическим декрементом затухания d. При малых декрементах затухания Q»p/d. В колебательном контуре с индуктивностью L, емкостью C и омическим сопротивлением R добротность колебательной системы
где w – собственная частота контура. В механической системе с массой m, жесткостью k и коэффициентом трения b.
Добротность колебательной системы
Добротность – количественная характеристика резонансных свойств колебательной системы, указывающая, во сколько раз амплитуда установившихся вынужденных колебаний при резонансе превышает амплитуду вынужденных колебаний вдали от резонанса, т. е. в области столь низких частот, где амплитуду вынужденных колебаний можно считать не зависящей от частоты. На этом свойстве основан метод измерения Добротность колебательной системы величина добротности характеризует также и избирательность колебательной системы. Чем больше добротность, тем уже полоса частот внешней силы, которая может вызвать интенсивные колебания системы.
Экспериментально добротность колебательной системы обычно находят как отношение частоты собственных колебаний к полосе пропускания системы, т.е. Q=w/Dw.
Численные значения добротности колебательной системы:
– для радиочастотного колебательного контура 30 – 100;
– для камертона 10000;
– для пластинки пьезокварца 100000;
– для объемного резонатора СВЧ колебаний 100 – 100000.[4]
1.2 Уравнение собственных затухающих колебаний физического и пружинного маятников
Рассмотрим движение груза, жестко зафиксированного на подвесе (металлическом стержне), закрепленном в точке O (см. приложение 1). Система «груз – подвес» в общем случае представляет собой физический маятник. Точку крепления этого маятника условно назовем точкой подвеса.
Опыт показывает, что физический маятник, выведенный из положения равновесия, совершает вращательные колебания. Согласно основному закону динамики вращательного движения произведение момента инерции системы «груз – подвес» на угловое ускорение маятника равно равнодействующему моменту внешних сил: силы тяжести m·g и силы сопротивления Fc (момент силы деформации растяжения тела N равен нулю). Спроецировав это уравнение на направление оси вращения, для случая малых колебаний получим следующее выражение:
где α(t) – угол отклонения колеблющегося груза, отсчитываемый от положения равновесия;
α’ и α” – соответственно угловая скорость и угловое ускорение маятника;
k и h – размерные константы;
I – момент инерции системы «груз – подвес»;
М = -m . g . r . sin(α) = -k . sin(α) – момент возвращающей силы (для малых колебаний М = -k . α);
Mc = -h . α’ – момент сил сопротивления (выражение справедливо для малых угловых скоростей).[5]
Поделив левую и правую части уравнения (1) на величину I и перенеся все слагаемые в левую часть, получим соотношение, аналогичное выражению, описывающему движение собственных затухающих колебаний груза на пружине.
где b = h/2I – коэффициент затухания;
w0 = (k/I) 1/2 – собственная частота колебаний груза.
Решение уравнения (2) имеет вид:
a(t) = a0 ·e – b t ·sin(w·t + j),(3)
гдеw=(w0 2 – b 2 ) 1/2 – частота затухающих колебаний груза.
Как видно из уравнения (3) амплитуда углового смещения будет уменьшаться (затухать) с течением времени по экспоненциальному закону. Коэффициент затухания определяет быстроту этого процесса. Он равен промежутку времени по истечении которого, амплитуда колебаний уменьшается в e раз.
Далее рассмотрим уравнение собственных затухающих колебаний пружинного маятника.
Пружинным маятником называется система, состоящая из груза массой m и невесомой пружины жесткостью k.
Пусть масса маятника m , коэффициент упругости пружины k , сила сопротивления, действующая на маятник, F = – bv , v – скорость маятника, b – коэффициент сопротивления среды, в которой находится маятник. Так как рассматриваем только линейные системы, b = const , k = const . x – смещение маятника от положения равновесия.
(второй закон Ньютона)
Данное уравнение и есть дифференциальное уравнение свободных затухающих колебаний пружинного маятника. Принято записывать его в следующем, так называемом каноническом виде:
– коэффициент затухания, – собственная частота свободных (незатухающих) колебаний пружинного маятника, то, что раньше мы обозначали просто w.
Уравнение затухающих колебаний в таком (каноническом) виде описывает затухающие колебания всех линейных систем; конкретная колебательная система отличается только выражениями для b и j0 .
2. Движения маятника с различными механизмами затухания
При исследовании собственных колебаний предполагается отсутствие внешней среды. Наличие среды приводит к появлению диссипативной силы, которая, как мы показали, постепенно уменьшает первоначально переданную системе энергию. Это выражается через уменьшение собственной частоты колебаний ω0 , также как постепенным уменьшением амплитуды колебаний.
Примечание: во избежание путаницы нумерация формул останется такой же как в научной литературе.[6]
Пусть на колеблющееся тело действует сила мокрого трения:
,
Уравнение движения частицы примет следующий вид:
, (1.35)
. (1.36)
Подставляя последнее в (1.35), получим:
(1.37).
Так как полученное уравнение верно для произвольного момента времени, то выражение в скобках должно быть нулем. Последнее дает для неизвестной величины следующее значение
(1.38)
, (1.39)
Учитывая (1.38), решение (1.36) примет следующий вид:
, (1.40)
Полученное уравнение движения описывает затухающие колебания, где и – постоянные, определяемые из начальных условий.
В зависимости от соотношения коэффициента трения и частоты собственных колебаний , затухающие колебания подразделяются на два класса. Они соответствуют случаям периодического и непериодического затухания.
Периодическое затухание. Оно осуществляется при слабых силах трения:
, (1.41)
когда величина (1.39) действительна. В этом случае решение (1.40) выражается формулой (в действительной форме)
, (1.42)
Графически это колебание представлено на рисунке (см. приложение 2) и является колебанием с постоянной частотой (1.39), но убывающей с течением времени амплитудой. В этом смысле это не только не гармоническое, но даже и не периодическое колебание, поскольку колебания не повторяются в том же виде. Тем не менее, удобно говорить о периоде этих колебаний, понимая под этим промежуток времени
, (1.43)
Говоря «амплитуда затухающих колебаний» понимают величину
, (1.44)
которая есть максимальное смещение частицы относительно положения равновесия во время колебаний. Из выражения (1.44) следует, что за время , (1.45) амплитуда убывает в раз. Этот промежуток времени называется временем затухания, а – декрементом затухания.
Наиболее объективной характеристикой затухания колебаний является логарифмический декремент, который является отношением периода колебаний (1.43) к времени затухания (1.45)
, (1.46)
Легко заметить, что логарифмический декремент равен натуральному логарифму отношения двух последующих амплитуд:
, (1.47)
Определим число N колебаний, в течение которых амплитуда колебаний убывает в , раз:
откуда следует, что
, (1.48)
На основании этого соотношения можно экспериментально определить логарифмический декремент затухания , считая соответствующее число колебаний.
Непериодическое затухание. При сильном трении
(1.49)
величина (1.43) становится мнимой. В этом случае удобно представить (1.42) так:
, (1.50)
, (1.51)
В рассматриваемом случае решение (1.42) примет вид:
, (1.52)
которое не описывает какое-либо колебание, а представляет экспоненциональное убывание смещения от положения равновесия (см. приложение 3). Непериодическое затухание маятника можно наблюдать, если поместить его в сильно вязкую среду (глицерин, мед).
Специальным случаем непериодического затухания является случай, когда . В этом случае решение уравнения (1.35) выражается в виде:
, (1.53).
Целью данной курсовой работы являлось изучение колебаний маятника с различными механизмами затухания. Для реализации поставленной цели предполагалось решение ряда задач, что позволило сделать следующие выводы:
На основании анализа существующей литературы даны определения исходных теоретических положений, а именно: колебания, виды колебаний, маятник (физический маятник, пружинный маятник), декремент затухания, добротность колебательной системы и т.д.
Также, исходя из проработанной литературы, сделан вывод о том, что данная тема изучалась и изучается многими авторами, как зарубежными, так и советскими, и находит практическая применение в различных науках.
Получены уравнения собственных затухающих колебаний на примерах физического и пружинного маятников.
,
где – коэффициент затухания,
– собственная частота свободных (незатухающих) колебаний пружинного маятника.
Таково полученное уравнение собственных затухающих колебаний пружинного маятника. Это уравнение описывает затухающие колебания всех линейных систем; конкретная колебательная система отличается только выражениями для b и j0 .
a(t) = a0 ·e – b t ·sin(w·t + j),(3)
гдеw=(w0 2 – b 2 ) 1/2 – частота затухающих колебаний груза.
Данное уравнение определяет быстроту процесса затухания колебаний физического маятника.
Определены два механизма затухающих колебаний: периодическое (осуществляется при слабых силах трения) и непериодическое (при сильном трении), а также получены формулы, для их расчета.
– для периодического механизма затухающих колебаний;
, – для непериодического механизма затухающих колебаний.
Библиографический список литературы
1. Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Наука, 1991. – 568 с.
2. Анищенко В.С. Сложные колебания в простых системах. М.: Наука, 1990. – 59 с.
3. Боголюбов Н.Н., Митропольский Ю.А. Асимптотические методы в теории нелинейных колебаний. М.: Наука, 1994. – 408 с.
4. Владимиров С.Н., Майдановский А.С., Новиков С.С. Нелинейные колебания многочастотных автоколебательных систем. Томск: изд-во Томск. ун-та, 1993. – 203 с.
5. Горелик Г. С., Колебания и волны, 2 изд., М., 1989. – 124 с.
6. Дмитриев А.С., Кислов В.Я. Стохастические колебания в радиофизике и электронике. М.: Наука, 2001. – 280 с.
7. Капранов М.В., Кулешев В.Н., Уткин Г.М. Теория колебаний в радиотехнике. М.: Наука, 1994. – 319 с.
8. Ланда П.С. Автоколебания в системах с конечным числом степеней свободы. М.: Наука, 1991. – 360 с.
9. Мигулин В.В., Медведев В.И., Мустель Е.Р., Парыгин В.Н. Основы теории колебаний. М.: Наука, 1989. – 390 с.
10. Мун Ф. Хаотические колебания: Вводный курс для научных работников и инженеров. М.: Мир, 1990. – 312 с.
11. Неймарк Ю.И., Ланда П.С. Стохастические и хаотические колебания. М.: Наука, 1995. – 424 с.
12. Рабинович М.И., Трубецков Д.И. Введение в теорию колебаний и волн. М.: Наука, 1994. – 431 с.
13. Стрелков С. П., Введение в теорию колебаний, 2 изд., М., 2002. – с. 597.
[1] Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. М.: Наука, 1991. – с. 137.
[2] Мигулин В.В., Медведев В.И., Мустель Е.Р., Парыгин В.Н. Основы теории колебаний. М.: Наука, 1989. – с. 52.
[3] Стрелков С. П., Введение в теорию колебаний, 2 изд., М., 2002. – с. 597.
[4] Горелик Г.С., Колебания и волны, 2 изд., М., 1989. – с. 82
[5] Мун Ф. Хаотические колебания: Вводный курс для научных работников и инженеров. М.: Мир, 1990. – с. 192.
[6] Стрелков С. П., Введение в теорию колебаний, 2 изд., М., 2002. – с. 149-154.
[spoiler title=”источники:”]
http://lektsii.org/12-53098.html
http://www.bestreferat.ru/referat-117033.html
[/spoiler]
| Название: Колебания маятника с различными механизмами затухания Раздел: Рефераты по физике Тип: курсовая работа Добавлен 00:16:42 15 ноября 2009 Похожие работы Просмотров: 1834 Комментариев: 22 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать |
1.21.
3АТУХАЮЩИЕ, ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Дифференциальное
уравнение затухающих колебаний и его
решение. Коэффициент затухания.
Логарифмический декремент
затухания. Добротность
колебательной
системы. Апериодический
процесс. Дифференциальное уравнение
вынужденных колебаний и его решение.
Амплитуда
и фаза вынужденных колебаний. Процесс
установления колебаний. Случай резонанса.
Автоколебания.
Затуханием
колебаний называется постепенное
уменьшение амплитуды колебаний с
течением времени, обусловленное потерей
энергии колебательной системой.
Собственные
колебания без затухания – это идеализация.
Причины затухания могут быть разные. В
механической системе к затуханию
колебаний приводит наличие трения.
Когда израсходуется вся энергия,
запасенная в колебательной системе,
колебания прекратятся. Поэтому амплитуда
затухающих
колебаний
уменьшается,
пока не станет равной нулю.
Затухающие колебания,
как и собственные, в системах, разных
по своей природе, можно рассматривать
с единой точки зрения – общих признаков.
Однако, такие характеристики, как
амплитуда и период, требуют переопределения,
а другие – дополнения и уточнения по
сравнению с такими же признаками для
собственных незатухающих колебаний.
Общие признаки и понятия затухающих
колебаний следующие:
-
Дифференциальное
уравнение должно быть получено с учетом
убывания в процессе колебаний
колебательной энергии. -
Уравнение колебаний
– решение дифференциального уравнения. -
Амплитуда затухающих
колебаний зависит от времени. -
Частота и период
зависят от степени затухания колебаний. -
Фаза и начальная
фаза имеют тот же смысл, что и для
незатухающих колебаний.
Механические
затухающие колебания.
Механическая
система:
пружинный маятник с учетом сил трения.
Силы,
действующие на маятник:
Упругая
сила.
![]() ,
,
где k
– коэффициент жесткости пружины, х –
смещение маятника от положения равновесия.
Сила
сопротивления.
Рассмотрим силу сопротивления,
пропорциональную скорости v
движения (такая зависимость характерна
для большого класса сил сопротивления):
![]() .
.
Знак “минус” показывает, что направление
силы сопротивления противоположно
направлению скорости движения тела.
Коэффициент сопротивления r
численно равен силе сопротивления,
возникающей при единичной скорости
движения тела:

Закон
движения
пружинного
маятника – это второй закон Ньютона:
ma
= Fупр.
+ Fсопр.
Учитывая,
что
![]() и
и
 ,
,
запишем второй закон Ньютона в виде:
 . (21.1)
. (21.1)
Разделив
все члены уравнения на m,
перенеся их все в правую часть, получим
дифференциальное
уравнение
затухающих колебаний:

Обозначим
![]() ,
,
где β
– коэффициент
затухания,
![]() ,
,
где ω0
– частота незатухающих свободных
колебаний в отсутствии потерь энергии
в колебательной системе.
В новых обозначениях
дифференциальное уравнение затухающих
колебаний имеет вид:
 .
.
(21.2)
Это линейное
дифференциальное уравнение второго
порядка.
Это
линейное дифференциальное уравнение
решается заменой переменных. Представим
функцию х, зависящую от времени t,
в виде:
![]() .
.
Найдем
первую и вторую производную этой функции
от времени, учитывая, что функция z
также является функцией времени:
![]() ,
,
 .
.
Подставим выражения
в дифференциальное уравнение:
 .
.
Приведем
подобные члены в уравнении и сократим
каждый член на
![]() ,
,
получим уравнение:
 .
.
Обозначим
величину
![]() .
.
Решением
уравнения
 являются
являются
функции
![]() ,
,
![]() .
.
Возвращаясь к
переменной х, получим формулы уравнений
затухающих колебаний:
![]()
![]() .
.
Таким
образом,
уравнение затухающих колебаний есть
решение дифференциального уравнения
(21.2):
![]()
![]()
(21.3)
Частота
затухающих колебаний:
![]() (физический
(физический
смысл имеет только вещественный корень,
поэтому
![]() ).
).
Период
затухающих колебаний:
 (21.5)
(21.5)
Смысл,
который вкладывался в понятие периода
для незатухающих колебаний, не подходит
для затухающих колебаний, так как
колебательная система никогда не
возвращается в исходное состояние из-за
потерь колебательной энергии. При
наличии трения колебания идут медленнее:
![]() .
.
Периодом
затухающих колебаний
называется минимальный промежуток
времени, за который система проходит
дважды положение равновесия в одном
направлении.
Для механической
системы пружинного маятника имеем:
 ,
,
 .
.
Амплитуда
затухающих колебаний:
![]() ,
,
для пружинного маятника
![]() .
.
Амплитуда
затухающих колебаний – величина не
постоянная, а изменяющаяся со временем
тем быстрее, чем больше коэффициент β.
Поэтому определение для амплитуды,
данное ранее для незатухающих свободных
колебаний, для затухающих колебаний
надо изменить.
При
небольших затуханиях амплитудой
затухающих колебаний
называется
наибольшее отклонение от положения
равновесия за период.
Графики
зависимости
смещения от времени
![]() и
и
амплитуды от времени
![]() представлены
представлены
на Рисунках 21.1 и 21.2.

Рисунок
21.1 – Зависимость смещения от времени
для затухающих колебаний.

Рисунок
21.2 – Зависимости амплитуды от времени
для затухающих колебаний
Характеристики
затухающих колебаний.
1.
Коэффициент затухания
β.
Изменение амплитуды
затухающих колебаний происходит по
экспоненциальному закону:
![]() .
.
Пусть за
время τ
амплитуда колебаний уменьшится в “e
” раз (“е” – основание натурального
логарифма, е ≈ 2,718). Тогда, с одной стороны,
 ,
,
а с другой стороны, расписав амплитуды
Азат.(t)
и Азат.(t+τ),
имеем
 .
.
Из этих соотношений следует βτ
= 1, отсюда
![]() .
.
Промежуток
времени τ,
за который амплитуда уменьшается в “е”
раз, называется временем релаксации.
Коэффициент
затухания β
– величина, обратно пропорциональная
времени релаксации.
2.
Логарифмический
декремент затухания δ
–
физическая величина, численно равная
натуральному логарифму отношения двух
последовательных амплитуд, отстоящих
по времени на период .


Если
затухание невелико, т.е. величина β
мала, то амплитуда незначительно
изменяется за период, и логарифмический
декремент можно определить так:
 ,
,
где
Азат.(t)
и Азат.(t+NT)
– амплитуды колебаний в момент времени
е и через N
периодов, т.е.в момент времени (t
+ NT).
3.
Добротность Q
колебательной системы
– безразмерная физическая величина,
равная произведению величины (2π)
νа
отношение энергии W(t)
системы в произвольный момент времени
к убыли энергии за один период затухающих
колебаний:
 .
.
Так как энергия
пропорциональна квадрату амплитуды,
то
 .
.
При малых
значениях логарифмического декремента
δ
добротность колебательной системы
равна
![]() ,
,
где Ne
– число колебаний, за которое амплитуда
уменьшается в “е” раз.
Так,
добротность пружинного маятника –
 .Чем
.Чем
больше добротность колебательной
системы, тем меньше затухание, тем дольше
будет длиться периодический процесс в
такой системе. Добротность
колебательной системы – безразмерная
величина, которая характеризует
диссипацию энергии во времени.
4. При
увеличении коэффициента β,
частота затухающих колебаний уменьшается,
а период увеличивается. При ω0
= β
частота затухающих колебаний становится
равной нулю ωзат.
= 0, а Тзат.
=
∞. При этом колебания теряют периодический
характер и называются апериодическими.
При ω0
= β
параметры системы, ответственные за
убывание колебательной энергии, принимают
значения, называемые критическими.
Для пружинного маятника условие ω0
= β
запишется так: ,
,
откуда найдем величину критического
коэффициента сопротивления:
![]() .
.

Рис. 21.3.
Зависимсть амплитуды апериодических
колебаний от времени
Вынужденные
колебания.
Все реальные колебания
являются затухающими. Чтобы реальные
колебания происходили достаточно долго
нужно периодически пополнять энергию
колебательной системы, действуя на нее
внешней периодически изменяющейся
силой
Рассмотрим
явление колебаний, если внешняя
(вынуждающая)
сила изменяется в зависимости от времени
по гармоническому закону. При этом в
системах возникнут колебания, характер
которых в той или иной мере повторит
характер вынуждающей силы. Такие
колебания называются вынужденными.
Общие признаки
вынужденных механических колебаний.
1. Рассмотрим
вынужденные механические колебаний
пружинного маятника, на который действует
внешняя (вынуждающая)
периодическая сила
![]() .
.
Силы, которые действуют на маятник,
однажды выведенный из положения
равновесия, развиваются в самой
колебательной системе. Это сила упругости
![]() и
и
сила сопротивления
![]() .
.
Закон
движения
(второй закон Ньютона) запишется следующим
образом:
 (21.6)
(21.6)
Разделим
обе части уравнения на m,
учтем, что
![]() ,
,
и получим дифференциальное
уравнение
вынужденных
колебаний:

Обозначим
![]() (β
(β
– коэффициент
затухания),
![]() (ω0
(ω0
– частота незатухающих свободных
колебаний),
![]() сила,
сила,
действующая на единицу массы. В этих
обозначениях дифференциальное
уравнение
вынужденных колебаний примет вид:
 (21.7)
(21.7)
Это дифференциальное
уравнение второго порядка с правой
частью, отличной от нуля. Решение такого
уравнения есть сумма двух решений
![]() .
.
![]() –
–
общее
решение однородного дифференциального
уравнения, т.е. дифференциального
уравнения без правой части, когда она
равна нулю. Такое решение нам известно
– это уравнение затухающих колебаний,
записанное с точностью до постоянной,
значение которой определяется начальными
условиями колебательной системы:
![]() ,
,
где
![]() .
.
Мы обсуждали ранее,
что решение может быть записано через
функции синуса.
Если
рассматривать процесс колебаний маятника
через достаточно большой промежуток
времени Δt
после включения вынуждающей силы
(Рисунок 21.2), то затухающие колебания в
системе практически прекратятся. И
тогда решением дифференциального
уравнения с правой частью будет решение
![]() .
.
Решение
![]() –
–
это частное решение неоднородного
дифференциального уравнения, т.е.
уравнения с правой частью. Из теории
дифференциальных уравнений известно,
что при правой части, изменяющейся по
гармоническому закону, решение
![]() будет
будет
гармонической функцией (sin
или cos)
с частотой изменения, соответствующей
частоте Ω
изменения правой части:
![]() , (21.8)
, (21.8)
где Аампл.
– амплитуда вынужденных колебаний, φ0
–сдвиг
фаз,
т.е. разность фаз между фазой вынуждающей
силы и фазой вынужденных колебаний. И
амплитуда Аампл.,
и сдвиг фаз φ0
зависят от параметров системы (β,
ω0)
и от частоты вынуждающей силы Ω.
Период
вынужденных колебаний равен
![]() (21.9)
(21.9)
График вынужденных
колебаний на Рисунке 4.1.

Рис.21.3. График
вынужденных колебаний
Установившиеся
вынужденные колебания являются так же
гармоническими.
Зависимости
амплитуды вынужденных колебаний и
сдвига фаз от частоты внешнего воздействия.
Резонанс.
1. Вернемся к
механической системе пружинного
маятника, на который действует внешняя
сила, изменяющаяся по гармоническому
закону. Для такой системы дифференциальное
уравнение и его решение соответственно
имеют вид:
 ,
,
![]() .
.
Проанализируем
зависимость амплитуды колебаний и
сдвига фаз от частоты внешней вынуждающей
силы, для этого найдем первую и вторую
производную от х и подставим в
дифференциальное уравнение.
![]() ,
,
 ,
,

Воспользуемся
методом векторной диаграммы. Из уравнения
видно, что сумма трех колебаний в левой
части уравнения (Рисунок 4.1) должна быть
равна колебанию в правой части. Векторная
диаграмма выполнена для произвольного
момента времени t.
Из нее можно определить
![]() .
.

Рисунок
21.4.
 , (21.10)
, (21.10)
 . (21.11)
. (21.11)
Учитывая
значение
![]() ,
,
![]() ,
,![]() ,
,
получим формулы для φ0
и Аампл.
механической системы:
 ,
,
 .
.
2. Исследуем
зависимость амплитуды вынужденных
колебаний от частоты вынуждающей силы
и величины силы сопротивления в
колеблющейся механической системе, по
этим данным построим график
![]() .
.
Результаты исследования отражены в
Рисунке 21.5, по ним видно, что при некоторой
частоте вынуждающей силы
![]() амплитуда
амплитуда
колебаний резко возрастает. И это
возрастание тем больше, чем меньше
коэффициент затухания β.
При
![]() амплитуда
амплитуда
колебаний становится бесконечно большой
![]() .
.
Явление
резкого возрастания амплитуды
вынужденных
колебаний при частоте вынуждающей силы,
равной
![]() ,
,
называется резонансом.
![]() (21.12)
(21.12)
Кривые
на Рисунке 21.5 отражают зависимость
![]() и
и
называются амплитудными
резонансными кривыми.

Рисунок
21.5 – Графики зависимости амплитуды
вынужденных колебаний от частоты
вынуждающей силы.
Амплитуда резогансных
колебаний примет вид:

(21.13)
Вынужденные
колебания – это незатухающие
колебания. Неизбежные потери энергии
на трение компенсируются подводом
энергии от внешнего источника периодически
действующей силы. Существуют системы,
в которых незатухающие колебания
возникают не за счет периодического
внешнего воздействия, а в результате
имеющейся у таких систем способности
самой регулировать поступление энергии
от постоянного источника. Такие системы
называются автоколебательными,
а процесс незатухающих колебаний в
таких системах – автоколебаниями.
В автоколебательной
системе можно выделить три характерных
элемента – колебательная система,
источник энергии и устройство обратной
связи между колебательной системой и
источником. В качестве колебательной
системы может быть использована любая
механическая система, способная совершать
собственные затухающие колебания
(например, маятник настенных часов).
Источником
энергии может служить энергия деформация
пружины или потенциальная энергия груза
в поле тяжести. Устройство обратной
связи представляет собой некоторый
механизм, с помощью которого
автоколебательная система регулирует
поступление энергии от источника. На
рис. 21.6 изображена схема взаимодействия
различных элементов автоколебательной
системы.
|
|
|
Рисунок |
 3
3Примером
механической автоколебательной системы
может служить часовой механизм с анкерным
ходом (рис. 21.7.). Ходовое колесо с косыми
зубьями жестко скреплено с зубчатым
барабаном, через который перекинута
цепочка с гирей. На верхнем конце маятника
закреплен анкер (якорек) с двумя
пластинками из твердого материала,
изогнутыми по дуге окружности с центром
на оси маятника. В ручных часах гиря
заменяется пружиной, а маятник –
балансиром – маховичком, скрепленным
со спиральной пружиной.
|
|
|
Рисунок |
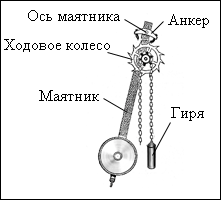
Балансир совершает
крутильные колебания вокруг своей оси.
Колебательной системой в часах является
маятник или балансир. Источником энергии
– поднятая вверх гиря или заведенная
пружина. Устройством, с помощью которого
осуществляется обратная связь, является
анкер, позволяющий ходовому колесу
повернуться на один зубец за один
полупериод.
Обратная связь
осуществляется взаимодействием анкера
с ходовым колесом. При каждом колебании
маятника зубец ходового колеса толкает
анкерную вилку в направлении движения
маятника, передавая ему некоторую порцию
энергии, которая компенсирует потери
энергии на трение. Таким образом,
потенциальная энергия гири (или
закрученной пружины) постепенно,
отдельными порциями передается маятнику.
Механические
автоколебательные системы широко
распространены в окружающей нас жизни
и в технике. Автоколебания совершают
паровые машины, двигатели внутреннего
сгорания, электрические звонки, струны
смычковых музыкальных инструментов,
воздушные столбы в трубах духовых
инструментов, голосовые связки при
разговоре или пении и т. д.
13
Соседние файлы в папке физика лекцыи
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Welcome to the stack exchange! Good question.
Absolutely.
But since there are losses other than drag you’ll need to run two sets of tests:
- Pendulum swing in the air and
- Pendulum swing in a vacuum
To be as precise as possible you should use the nonlinear model (differential equation) of a pendulum
derived here which applies to the pendulum in vacuum, and without losses that might occur in whatever is suspending the pendulum.
The hard part at this point is determining a functional model that accounts for the non-drag energy losses. But assume you can do this – perhaps by trial and error – by proposing a loss model and fitting to data.
In any event this gives you the drag-free model.
You’ll then need to modify this drag free model (which assumes a point mass) with a tangential force that’s equal to the drag force on the projected area, $A$
$rho$ is your calculated or measured air density , $v$ is the tangential velocity, and $C_D$ is the drag coefficient of the bob – what you are trying to solve for.
This gives you a total loss model
Between the measurements in vacuum and air, and the total and drag-free loss models you can back out, calculate $C_D$
Лабораторная работа № 119
Изучение затухающих механических колебаний
Цель работы: Изучение затухающих колебаний,
определение логарифмического декремента затухания и коэффициента
сопротивления среды с помощью пружинного маятника.
Приборы и принадлежности: пружинный маятник с
миллиметровой шкалой, груз с лопаткой, сосуд с водой, секундомер.
Теоретическое введение
В данной работе исследуются свободные
затухающие колебания пружинного маятника.
Если на маятник не действуют диссипативные
силы и упругие силы подчиняются закону Гука ![]() ,
,
то он будет совершать гармонические колебания. Гармонические колебания – колебания, при которых физическая
величина изменяется со временем по закону синуса или косинуса.
Вывод уравнения, а
также формул частоты, периода гармонического колебания пружинного маятника
смотрите в работе №116.
Любые реальные
свободные колебания со временем затухают. Это связано с тем, что на
колеблющуюся систему всегда действуют диссипативные силы (силы сопротивления,
трения), которые нельзя исключить. Поэтому энергия колеблющейся системы
тратиться на работу диссипативных сил, т.е. система теряет энергию.
Пусть
на пружинный маятник (систему) кроме упругой силы ![]() где
где
r – коэффициент сопротивления. Тогда
уравнение движения груза пружинного маятника на основании II закона Ньютона имеет
вид
![]() , (1)
, (1)
где ![]() –
–
ускорение, ![]() –
–
скорость.
Разделив
(1) на m и введя обозначения ![]() –
–
коэффициент затухания, ![]() -циклическая
-циклическая
частота собственных колебаний маятника, получим дифференциальное уравнение
затухающих колебаний
![]()
Решение
уравнения (2) может быть найдено в виде
![]()
где ![]() –
–
частота затухающих колебаний,
![]() (4)
(4)
амплитуда затухающих
колебаний.
График
затухающих колебаний имеет вид:
 |
Рис.2
График
амплитуды затухающих колебаний:

Рис.3
Частота
и период затухающих колебаний пружинного маятника
![]() (5)
(5)
 (6)
(6)
Время,
за которое амплитуда затухающих колебаний уменьшается в e раз, называется
временем релаксации t.
Время релаксации t
связано с коэффициентом затухания b соотношением
![]() (7)
(7)
b – характеризует
быстроту затухания колебаний.
Логарифм
отношения амплитуды A1(t) затухающих колебаний
в момент времени t
к амплитуде A2(t+T) колебаний через
время, равное периоду T называется логарифмическим декрементом затухания
 (8)
(8)
При очень больших коэффициентах
сопротивления r (когда k/m<<r2/4m2),
несмотря на наличие сил, возвращающих систему в положение равновесия,
колебания не возникает. Система возвращается в положение равновесия
асимптотически (не переходя положения равновесия). Такое движение называется
апериодическим. На рис.2 показан характер колебаний при различных декрементах
затухания.
Определив на опыте две последующие амплитуды
An и An+1 и зная массу колеблющейся
системы m и период затухающих
колебаний Т, можно вычислить
коэффициент сопротивления среды по формуле
![]()
За время релаксации система совершает
количество колебаний N = t/T. С учетом этого и (7)
логарифмический декремент затухания
![]() ,
,
т.е. логарифмический
декремент затухания есть величина, обратная числу колебаний, совершаемых
системой за время, в течение которого амплитуда колебаний убывает в e раз.
Затухание колебаний по экспоненциальному
закону происходит в том случае, когда сила трения пропорциональна скорости.
При этом отношение двух последовательных амплитуд (декремент затухания)
остается постоянным. При других типах сил трения закон затухания будет иным.
Во многих колебательных системах наряду с трением, пропорциональным скорости,
присутствует и сухое трение. Поэтому на опыте часто получается, что отношение
двух последовательных амплитуд не является постоянной величиной.
Описание рабочей установки и метода
измерений
Изучение затухающих колебаний с помощью пружинного
маятника, часть колеблющейся системы которого помещена в вязкую среду,
позволяет определить логарифмический декремент затухания и коэффициент
сопротивления этой среды.
Логарифмический декремент затухания
определяется по формуле (8). Но на практике обычно измеряют не две
последовательные амплитуды An
и An+1, а начальную
амплитуду А0 и конечную
амплитуду Аn через
некоторое число колебаний n. В этом
случае, поскольку отношение каждой предыдущей амплитуды к последующей в
промежутке отА0 до Аn равно
![]() ,
,
То
![]() .
.
Следовательно:
![]()
Таким образом, для
логарифмического декремента затухания d
окончательно получим
![]()
где А0 – амплитуда начального
колебания; Аn –
амплитуда n-го колебания.
Зная
логарифмический декремент затухания d
и измерив период затухающих колебаний Т,
можно определить коэффициент r силы
сопротивления
![]() (11)
(11)

Подготовка прибора к
работе
Под
груз с лопаткой, висящей на пружине, подставляют сосуд с водой так, чтобы
лопатка оказалась в воде. Передвигая кронштейн по высоте штатива (см.рис.3),
добиваются, чтобы при спокойно висящем грузе поверхность воды пересекала
середину стержня, соединяющего лопатку с грузом.
Порядок выполнения работы и обработка
результатов измерений
1.
Для измерения периода затухающих колебаний
подвешенный на пружине груз с лопаткой (вместе с указательной пластинкой)
вывести из положения равновесия, оттянув его вниз на 3 или 4 см, и отпускают.
При колебаниях груз и указательная пластинка не должны цепляться за шкалу.
2.
Секундомером измерить промежуток времени t, в течение которого груз совершает
30 или 40 полных колебаний.
3.
Внимание!
В момент остановки секундомера необходимо одновременно зафиксировать
амплитуду последнего n-го колебания
Аn. Данные занести в
таблицу.
4.
Для увеличения точности следует сделать
5-10 таких измерений с одним и тем же числом колебаний, задавая одну и ту же
начальную амплитуду А0.
5.
В таблицу последовательно занести
амплитуду начального колебания А0,
амплитуду n-го колебания Аn и значение времени t для 5-10 отдельных измерений. Затем
находят среднюю амплитуду <An>.
6.
Определить среднее значение времени <t> и по формуле
![]()
рассчитать
период затухающих колебаний системы.
7.
По формуле (10) рассчитать логарифмический
декремент затухания d.
8.
По формуле (11) вычислить коэффициент r силы сопротивления вязкой среды.
Масса груза с лопаткой m = 102,57
г.
9.
Используя дифференциальный метод,
рассчитать относительную Е и
абсолютную Dr погрешности
коэффициента сопротивления. Данные занести в таблицу.
Таблица
|
№ |
п |
A0 |
An |
<An> |
t |
<t> |
T |
d |
r |
Dr |
E |
|
м |
м |
м |
с |
с |
с |
кг/с |
кг/с |
% |
|||
Вопросы для допуска к работе
1.
Какова цель работы?
2.
Какие колебания называются гармоническими?
Запишите уравнение гармонических колебаний и назовите величины, входящие в
него.
3.
Что называется декрементом затухания?
Логарифмическим декрементом затухания?
4.
Опишите установку и порядок выполнения
работы.
5.
Запишите рабочие формулы для определения
логарифмического декремента затухания и коэффициента сопротивления среды.
Вопросы для защиты работы
1.
Получите дифференциальное уравнение
гармонических колебаний и введите формулу периода колебаний пружинного
маятника.
2.
Почему реальные колебания являются
затухающими? Получите дифференциальное уравнение затухающих колебаний.
3.
Решая дифференциальное уравнение, получите
формулу амплитуды, частоты и периода затухающих колебаний. Представьте
графически затухающие колебания.
4.
Каков физический смысл коэффициента
затухания b?
5.
Выведите рабочую формулу (16) для
определения логарифмического декремента затухания. Каков его физический
смысл?
6.
Используя дифференциальный метод, получите
формулу для расчета относительной погрешности коэффициента сопротивления r.
