Рано или поздно при изучении курса физики ученики и студенты сталкиваются с задачами на силу упругости и закон Гука, в которых фигурирует коэффициент жесткости пружины. Что же это за величина, и как она связана с деформацией тел и законом Гука?
Содержание:
- Сила упругости и закон Гука
- Определение коэффициента жесткости
- Расчет жесткости системы
- Последовательное соединение системы пружин
- Параллельное соединение системы пружин
- Вычисление коэффициента жесткости опытным методом
- Примеры задач на нахождение жесткости
- Видео
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = – k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).

Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.

Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем – в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.
Видео
Из этого видео вы узнаете, как определить жесткость пружины.
![]()
Способность к упругим и пластическим деформациям зависит от природы вещества, из которого состоит тело, условий, в которых оно находится; способов его изготовления. Например, если взять разные сорта железа или стали, то у них можно обнаружить совершенно разные упругие и пластичные свойства. При обычных комнатных температурах железо является очень мягким, пластичным материалом; закаленная сталь, наоборот, — твердый, упругий материал.

Пластичность многих материалов представляет собой условие для их обработки, для изготовления из них нужных деталей. Поэтому она считается одним из важнейших технических свойств твердого вещества.
При деформации твердого тела происходит смещение частиц (атомов, молекул или ионов) из первоначальных положений равновесия в новые положения. При этом изменяются силовые взаимодействия между отдельными частицами тела. В результате в деформированном теле возникают внутренние силы, препятствующие его деформации.
Различают деформации растяжения (сжатия), сдвига, изгиба, кручения.
Силы упругости
Силы упругости имеют электромагнитную природу. Они препятствуют деформациям и направлены перпендикулярно поверхности соприкосновения взаимодействующих тел, а если взаимодействуют такие тела, как пружины, нити, то силы упругости направлены вдоль их оси.
Силу упругости, действующую на тело со стороны опоры, часто называют силой реакции опоры. Абсолютное удлинение:
где и длина тела в деформированном и недеформированном состоянии соответственно.

Относительное удлинение:
[custom_ads_shortcode1]
Закон Гука
Небольшие и кратковременные деформации с достаточной степенью точности могут рассматриваться как упругие. Для таких деформаций справедлив закон Гука:
- Сила упругости, возникающая при деформации тела прямо пропорциональна абсолютному удлинению тела и направлена в сторону, противоположную смещению частиц тела:
где проекция силы на ось жесткость тела, зависящая от размеров тела и материала, из которого оно изготовлено, единица жесткости в системе СИ Н/м.
[custom_ads_shortcode2]
Примеры решения задач
| Понравился сайт? Расскажи друзьям! |
Закон Гука был открыт в XVII веке англичанином Робертом Гуком. Это открытие о растяжении пружины является одним из законов теории упругости и выполняет важную роль в науке и технике. Формулировка этого закона выглядит следующим образом: сила упругости, которая появляется в момент деформации тела, пропорциональна удлинению тела и направлена противоположно движению частиц этого тела относительно других частиц при деформации.
Математическая запись закона выглядит так:

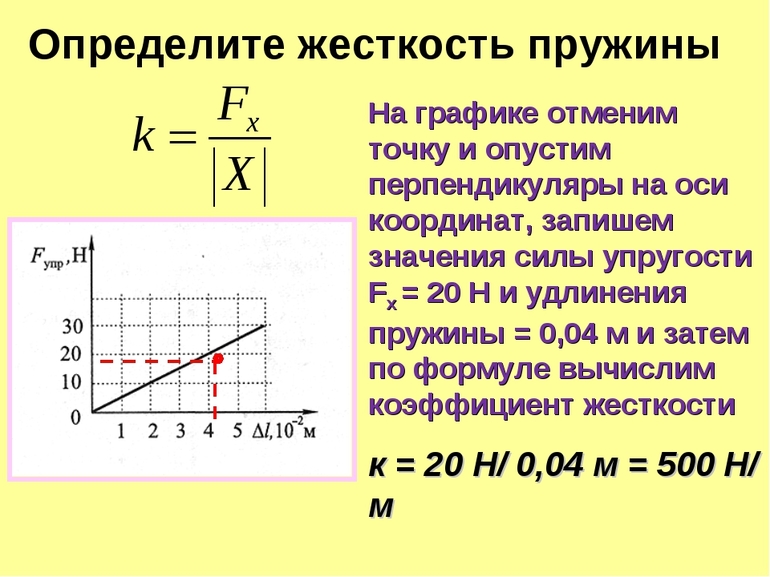
Рис. 1. Формула закона Гукагде Fупр – соответственно сила упругости, x – удлинение тела (расстояние, на которое изменяется исходная длина тела), а k – коэффициент пропорциональности, называемый жесткостью тела. Сила измеряется в Ньютонах, а удлинение тела – в метрах.
Для раскрытия физического смысла жесткости, нужно в формулу для закона Гука подставить единицу, в которой измеряется удлинение – 1 м, заранее получив выражение для k.
Рис. 2. Формула жесткости телаЭта формула показывает, что жесткость тела численно равна силе упругости, которая возникает в теле (пружине), когда оно деформируется на 1 м. Известно, что жесткость пружины зависит от ее формы, размера и материала, из которого произведено данное тело.

Теперь, когда известно, какая формула выражает закон Гука, необходимо разобраться в его основной величине. Основной величиной является сила упругости. Она появляется в определенный момент, когда тело начинает деформироваться, например, когда пружина сжимается или растягивается.
Она направлена в обратную сторону от силы тяжести. Когда сила упругости и сила тяжести, действующие на тело, становятся равными, опора и тело останавливаются.
Деформация – это необратимые изменения, происходящие с размерами тела и его формой. Они связанны с перемещением частиц относительно друг друга. Если человек сядет в мягкое кресло, то с креслом произойдет деформация, то есть изменятся его характеристики. Она бывает разных типов: изгиб, растяжение, сжатие, сдвиг, кручение.

Так как сила упругости относится по своему происхождению к электромагнитным силам, следует знать, что возникает она из-за того, что молекулы и атомы – наименьшие частицы, из которых состоят все тела, притягиваются друг другу и отталкиваются друг от друга. Если расстояние между частицами очень мало, значит, на них влияет сила отталкивания. Если же это расстояние увеличить, то на них будет действовать сила притяжения. Таким образом, разность сил притяжения и сил отталкивания проявляется в силах упругости.
Сила упругости включает в себя силу реакции опоры и вес тела. Сила реакции представляет особый интерес. Это такая сила, которая действует на тело, когда его кладут на какую-либо поверхность. Если же тело подвешено, то силу, действующую на него, называют, силой натяжения нити. Как мы уже выяснили, сила упругости возникает при деформации, и направлена она на восстановление первоначальных форм и размеров строго перпендикулярно к деформируемой поверхности. У сил упругости также есть ряд особенностей.
- они возникают во время деформации;
- они появляются у двух деформируемых тел одновременно;
- они находятся перпендикулярно поверхности, по отношению к которой тело деформируется.
- они противоположны по направлению смещению частиц тела.
Закон Гука применяется как в технических и высокотехнологичных устройствах, так и в самой природе. Например, силы упругости встречаются в часовых механизмах, в амортизаторах на транспорте, в канатах, резинках и даже в человеческих костях. Принцип закона Гука лежит в основе динамометра – прибора, с помощью которого измеряют силу.

Рис. 3. ДинамометрСтатья подробно знакомит учащихся с материалом о том, как формулируется обобщенный закон Гука, который изучают в 7 классе, и его основной величине – силе упругости. Средняя оценка: 4.3. Всего получено оценок: 375.
Page 2
ОбразовакаФизика
- МанометрТест
- Закон ГукаТест
- Закон ПаскаляТест
- Сообщающиеся сосудыТест

ОГЭ 2018 по физике ›
Твёрдые тела под действием силы способны изменять свои форму и (или) объём. Взяв за концы металлическую линейку, можно её согнуть. Если перестать прикладывать силу, то линейка восстановит свою форму. Если сжать пружину (рис. 35), то она сократится, т.е. деформируется. При прекращении действия силы пружина вернётся в первоначальное состояние.
Изменение формы или объёма тела при действии на него силы называется деформацией.
Если длина пружины в недеформированном состоянии ( l_0 ), а после растяжения ( l ), то изменение её длины ( l=l-l_0=x ), где ( l ) или ( x ) – удлинение или деформация.
При деформации в теле возникает сила упругости, которая стремится вернуть его в первоначальное состояние. Сила упругости ( (vec{F}_{упр}) ) — сила, возникающая в теле в результате деформации, стремящаяся вернуть тело в первоначальное состояние и направленная в сторону, противоположную деформации (удлинению).
Так, при растяжении пружины эта сила направлена влево к положению равновесия, при
сжатии пружины сила упругости направлена вправо (рис. 36).

Если тело после прекращения действия силы принимает первоначальную форму, то деформация является упругой. Если тело после прекращения действия силы не принимает первоначальную форму, то деформация является неупругой или пластической.
При малых деформациях сила упругости прямо пропорциональна удлинению. Поскольку сила упругости и деформация направлены в противоположные стороны, то: ( F_{упр}=-kDelta l ), где ( k ) — коэффициент пропорциональности, называемый жёсткостью тела. Жёсткость зависит от размеров тела, его формы, материала, из которого сделано тело.
None Формула ( F_{упр}=-kDelta l ) выражает закон Гука: сила упругости, возникающая при деформации тела, прямо пропорциональна удлинению (деформации) тела и направлена в сторону, противоположную деформации.

Важно понимать, что закон Гука справедлив при малых деформациях.
На рисунке 37 приведён график зависимости модуля силы упругости от деформации. Поскольку эта зависимость линейная, то графиком зависимости является прямая, проходящая через начало координат и составляющая угол ( alpha ) с осью абсцисс. По графику можно определить жёсткость тела. Например, значению деформации 2 см соответствует сила упругости 4 Н. Разделив 4 Н на 0,02 м, получим ( k ) = 200 Н/м. В треугольнике АОВ жёсткость ( k ) равна тангенсу угла ( alpha ): ( k=mathrm{tg}alpha ).
Существуют разные виды деформации: растяжения, сжатия, сдвига, изгиба и кручения. В рассмотренных примерах линейка подвергалась деформации изгиба, пружина — деформации растяжения и сжатия, винты, гайки, болты при закручивании испытывают деформацию кручения, тяжёлые предметы при перемещении по полу — деформацию сдвига.
Предположим, что на полу стоит ящик (рис. 38). На него действует сила тяжести ( vec{F}_т ), направленная вертикально вниз. Ящик, взаимодействуя с полом, деформирует его и деформируется сам. И на ящик, и на пол действует сила упругости, характеризующая их взаимодействие. Сила упругости ( vec{N} ), действующая на ящик со стороны пола, приложена к ящику и направлена вертикально вверх; сила упругости ( vec{P} ), действующая со стороны ящика на пол, приложена к полу и направлена вертикально вниз. Эта сила называется весом тела.
Весом тела называют силу, с которой тело, вследствие его притяжения к Земле, действует на опору или подвес. В отличие от силы тяжести, вес тела приложен не к телу, а к опоре или к подвесу. Вес — это сила упругости.
Если тело покоится или движется равномерно и прямолинейно, вес тела численно равен силе тяжести, действующей на него: ( vec{P}=mvec{g} ).
На тело, движущееся вместе с платформой или подвесом вертикально вниз с ускорением ( vec{a} ), направленным в сторону движения, действуют сила тяжести ( vec{F}_{т} ) и сила упругости ( N ) со стороны опоры или подвеса (рис. 39, 40).
Второй закон Ньютона для этой ситуации: ( mvec{g}+vec{N}=mvec{a} ). В проекциях на координатную ось: ( mg-N=ma ) или ( N=mg-ma ). Поскольку ( N=P ), ( P = m(g — a) ).
Если тело движется вниз вместе с опорой или подвесом с ускорением, направленным так же, как и ускорение свободного падения, то его вес меньше силы тяжести, т.е. меньше веса покоящегося тела. Если ускорение тела равно ускорению свободного падения ( vec{a}=vec{g} ), то тело находится в состоянии невесомости.
В таком состоянии находится космонавт в космическом корабле, прыгун с трамплина во время полёта вниз.
На тело, движущееся вместе с платформой или подвесом вертикально вверх с ускорением ( vec{a} ), направленным в сторону движения, действуют сила тяжести ( vec{F}_т ) и сила упругости ( vec{N} ) со стороны опоры или подвеса (рис. 40).
Второй закон Ньютона для этой ситуации: ( mvec{g}+vec{N}=mvec{a} ). В проекциях на координатную ось: ( mg-N=-ma ) или ( N=mg+ma ). Поскольку ( N=P ), ( P=m(g+a) ).

Таким образом, если тело движется вверх вместе с опорой или подвесом с ускорением, направленным противоположно ускорению свободного падения, то его вес больше силы тяжести, т.е. больше веса покоящегося тела. Увеличение веса тела при движении с ускорением называют перегрузкой. Перегрузки испытывают космонавт в космическом корабле, пилот реактивного самолёта при взлёте и посадке.
Содержание.
- ПРИМЕРЫ ЗАДАНИЙ
- Ответы
[custom_ads_shortcode3]
ПРИМЕРЫ ЗАДАНИЙ
[custom_ads_shortcode1]
Часть 1
Имеются две абсолютно упругие пружины. Под действием одной и той же силы первая пружина удлинилась на 8 см, а вторая — на 4 см. Сравните жёсткость ( k_2 ) второй пружины с жёсткостью ( k_1 ) первой пружины.

1) ( k_1=k_2 )
2) ( 4k_1=k_2 )
3) ( 2k_1=k_2 )
4) ( k_1=2k_2 )2. Имеются две абсолютно упругие пружины: одна жёсткостью 200 Н/м, другая жёсткостью 400 Н/м. Сравните силу упругости ( F_2 ), возникающую во второй пружине, с силой упругости ( F_1 ), возникающей в первой пружине, при одинаковом их удлинении.
1) ( F_2=F_1 )
2) ( F_2=4F_1 )
3) ( 2F_2=F_1 )
4) ( 0.5F_2=F_1 )3. Ученик, растягивая пружину динамометра последовательно на 1Н, 2Н, ЗН и 4Н, каждый раз измерял её удлинение и результаты измерений вносил в таблицу. Определите по данным таблицы жёсткость пружины динамометра.
1) 0,02 Н/м 2) 0,5 Н/м 3) 2 Н/м 4) 50 Н/м4. На рисунке приведены графики зависимости силы упругости от удлинения. Сравните жёсткость пружин.

1) ( k_2=k_1 ) 2) ( k_2>k_1 ) 3) ( k_2<k_1 ) 4) ( k_2geq k_1 )5. Учащийся выполнял эксперимент по измерению удлинения ( x ) пружин при подвешивании к ним грузов. Полученные учащимся результаты представлены на рисунке в виде диаграммы. Какой вывод о жёсткости пружин ( k_1 ) и ( k_2 ) можно сделать из анализа диаграммы, если к концам пружин были подвешены грузы одинаковой массы?
1) ( k_2=4k_1 ) 2) ( k_1=2k_2 ) 3) ( k_2=2k_1 ) 4) ( k_1=k_2 )6. Под действием силы 3 Н пружина удлинилась на 4 см. Чему равна сила, под действием которой удлинение этой пружины составит 6 см?
1) 3,5 Н 2) 4 Н 3) 4,5 Н 4) 5 Н7. Две пружины растягиваются одинаковыми силами. Жёсткость первой пружины ( k_1 ) в 2 раза больше жесткости второй пружины ( k_2 ). Удлинение первой пружины ( Delta l_1 ), удлинение второй пружины ( Delta l_2 ) равно1) ( 0.5Delta l_1 ) 2) ( 0.67Delta l_1 ) 3) ( 1.5Delta l_1 ) 4) ( 2.5Delta l_1 )8. В лифте, движущемся вниз равноускоренно из состояния покоя, стоит ящик. Модуль веса ящика1) равен модулю силы тяжести 2) больше модуля силы тяжести 3) меньше модуля силы тяжести 4) увеличивается с увеличением скорости лифта9. Человек испытывает перегрузки при1) равномерном движении вниз 2) равномерном движении вверх 3) равноускоренном движении вверх из состояния покоя 4) равноускоренном движении вниз с ускорением свободного падения10. Различие веса тела на экваторе и на полюсе можно обнаружитьА. Взвешивая тело на рычажных весах Б. Взвешивая тело на пружинных весахПравильный ответ1)только А 2)только Б 3) и А, и Б 4) ни А, ни Б11. Установите соответствие между физической величиной (левый столбец) и характером её изменения (правый столбец) при растяжении пружины динамометра. В ответе запишите подряд номера выбранных ответовФИЗИЧЕСКАЯ ВЕЛИЧИНА A. Модуль силы упругости пружины Б. Жёсткость пружины B. Модуль удлинения пружиныХАРАКТЕР ИЗМЕНЕНИЯ ВЕЛИЧИНЫ 1) уменьшается 2) увеличивается 3) не изменяется12. Из приведённых ниже высказываний выберите два верных и запишите их номера в таблицу.
1) Закон Гука справедлив при любых деформациях. 2) Сила упругости направлена в сторону, противоположную деформации. 3) Жёсткость зависит только от материала, из которого изготовлено тело.
4) Вес тела всегда равен действующей на него силе тяжести. 5) Вес приложен к опоре или к подвесу.
[custom_ads_shortcode2]
Часть 2
Груз массой 5 кг начинают поднимать вертикально вверх с ускорением 2 м/с. Чему равен вес груза?
[custom_ads_shortcode3]
Ответы

Обзор материала
Мы живем в мире физических тел, которые действуют друг на друга, т. е взаимодействуют. В результате взаимодействия тела могут изменить скорость, форму, размеры. Мерой взаимодействия тел является сила. При объяснении механических явлений необходимы знания о силе тяжести, силе упругости и силе трения. Известно, что на любое тело действует сила тяжести, но многие тела не падают, а находятся в покое. Неподвижны стол, книги на столе, люстра, телевизор, человек в кресле. Кроме силы тяжести на эти тела действует и сила упругости. Актуальность темы заключается в том, сила упругости противодействует внешней нагрузке и восстанавливает форму тела, что имеет огромное значение в природе, технике, науке и в жизни каждого человека. В 7 классе силе упругости посвящен только один параграф, нет ни одной лабораторной работы, что недостаточно для полного представления об этой силе. Дополнительные знания необходимы и для успешного изучения механики в 9 классе. Объект учебно-исследовательской работы – сила упругости. Предмет – три пружины различной жесткости. Гипотеза – экспериментально наблюдаемая закономерность является общей ( законом Гука). Цель работы – определение зависимости силы упругости от величины деформации. Поставленную цель можно реализовать, решив следующие задачи: 1) изучить теоретический материал по теме работы; 2) провести эксперимент по определению значений силы упругости и удлинений пружин; 3) построить график зависимости силы упругости от удлинения; 4) по графику определить жёсткость пружин; 5) провести анализ полученных результатов. Методы исследования – поиск информации, анализ материалов, эксперимент. Сила упругости. Закон Гука Упругие силы возникают в твердых телах, жидкостях и газах. Изменение объёма или формы тела называется деформацией. Сила упругости – это сила, возникающая при деформации тела и зависящая от величины деформации. Твердые тела сохраняют свой объём и форму. При усилии изменить их возникают силы упругости. Жидкости не сохраняют форму, поэтому при их переливании из одного сосуда в другой силы упругости не появляются. Если же попробовать сжать жидкость, то сразу же возникают огромные силы упругости. Силы упругости действуют при сжатии газа. Чтобы удержать газ в определённом объёме, нужны внешние силы. Силы упругости появляются при деформации, но не всегда деформация приводит к появлению сил упругости. Например, при деформации тел из глины, пластилина тоже возникает сила, но это не сила упругости, так как её значение зависит не от величины деформации, а от скорости изменения деформации. Чем больше эта скорость, тем больше сила. Силы упругости являются электромагнитными силами, так как они появляются в результате взаимодействия зарядов. Молекулы состоят из атомов, атомы – из заряженных частиц (электронов и протонов). В недеформированном теле атомы находятся на таком расстоянии, при котором силы притяжения и отталкивания уравновешиваются. При деформации расстояния между молекулами или атомами изменяются, поэтому начинают преобладать либо силы притяжения, либо силы отталкивания. Электрические силы стремятся вернуть частицы в первоначальное положение. В результате возникает сила упругости. Эта сила всегда направлена так, чтобы уменьшить величину деформации тела. Деформации бывают упругими и пластическими. Упругая деформация – это деформация, при которой после прекращения внешнего воздействия тело принимает первоначальные форму и размеры. Металлы, стекло, камни можно упруго растянуть, но всего лишь на несколько процентов. Хорошими упругими свойствами обладает резина. Её можно растянуть на несколько сот процентов. Пластическая деформация – это деформация, которая сохраняется после прекращения внешнего воздействия. Такие деформации характерны для пластилина, свинца. Металлы стали незаменимыми конструкционными материалами, так как они обладают твердостью при комнатных температурах и пластичностью при высоких. К упругим деформациям относятся деформации растяжения, сжатия, кручения, изгиба, сдвига и среза. Для упругих деформаций выполняется закон Гука. Роберт Гук, английский ученый, родился в 1635 г. В детстве увлекался рисованием и изобретением механических игрушек. В школе изучал несколько языков, любил математику. Поступил в колледж Оксфордского университета. Не имея достаточных средств, вынужден был подрабатывать певчим в церкви, ассистентом по химии. Закончив колледж, получил степень магистра искусств. Р. Гук был членом и секретарем Лондонского Королевского общества, профессором Лондонского университета. Это был разносторонний ученый: построил воздушный насос, усовершенствовал барометр, зеркальный телескоп, микроскоп, предсказал закон всемирного тяготения И. Ньютона. Р. Гук был и архитектором: по его проектам было построено несколько зданий в Лондоне. Большое значение имеет закон, открытый в 1660 г., названный законом Гука: изменение длины тела при растяжении (или сжатии) прямо пропорционально модулю силы упругости. Формула закона Гука: Fупр.= k ∆l, где Fупр. – модуль силы упругости; k – жесткость тела, зависит от формы и размеров, материала; ∆l – величина деформации. Закон Гука справедлив при малых, т. е упругих деформациях. По удлинению пружины можно судить о силе, действующей на неё. Это используется в динамометре, приборе для измерения сил. Закон Гука имеет большое практическое значение в природе, технике, нашей повседневной жизни. Растения и животные могут выдерживать большие нагрузки. В результате действия силы упругости деревья выдерживают порывы ветра, налипший слой снега Все тела, находящиеся на Земле, выдерживают силу атмосферного давления. Еще больше нагрузку выдерживают животные и растения, обитающие на дне глубоких водоемов. Чтобы ловить добычу, пауки плетут паутину разных типов. Паутинная нить пауков-кругопрядов самое прочное натуральное волокно в мире. Прежде чем порваться, она растягивается на треть длины. Участок кости, испытывающий постоянную нагрузку, может разрушиться. Периодические же нагрузки стимулируют откладку костной ткани. Если нагрузка будет отсутствовать, то кость станет хрупкой и даже атрофируется. Эти явления наблюдаются при длительном пребывании человека в космосе в условиях невесомости. Мышцы способны сокращаться и расслабляться, но благодаря своей эластичности они способны возвращаться к исходным размерам и форме. Все тела, подвешенные на одной или нескольких опорах, испытывают деформацию изгиба, при которой нарушается прямолинейность главной оси тела. Балки и стержни, расположенные горизонтально, под действием силы тяжести или нагрузок прогибаются. Деформируются батуты, гимнастические снаряды, водные трамплины, теннисные ракетки. Деформация растяжения — вид деформации, при которой нагрузка прикладывается продольно от тела. Такую деформацию испытывают тросы, канаты, цепи в подъемных устройствах, стяжки между вагонами. Это находит большое применение в строительстве. Кручение испытывают валы всех машин, винты, отвертки. При этом к телу приложен крутящий момент, вызванный парой сил, действующих в перпендикулярной плоскости оси тела. Движение машины, вертолетов было бы не возможно без деформации кручения. Любой инструмент (молоток, гаечный ключ, ножницы, отвертка) испытывает при работе различные виды деформации и при изготовлении рассчитываются на упругие деформации. Инструменты сохраняют рабочее состояние в течение долгого времени, потому что остаточные деформации у них малы и накапливаются за большой срок их использования. В производственных процессах фрезы, сверла, резцы станков также подвергаются разным деформациям, но служат человеку долго вследствие того, что эти деформации являются упругими. В современном производстве широко используется и остаточные деформации. Например, в штамповке, ковке, чеканке, лепке, прокатке, формовке. Свойство тел восстанавливать свое первоначальное положение после удаления нагрузки называют упругостью. Охотничий или спортивный лук, длинные пролеты мостов, автомобильные шины, различные пружины, надувные матрасы, подошвы для обуви обладают большой упругостью. Вводя в металл примеси, изменяют его упругие свойства. Из железа делают сталь, из меди – латунь и бронзу. Композиты — твердые тела, в которых атомы располагаются упорядоченно в определенной области пространства, но этот порядок не повторяется с регулярной периодичностью. Композиты, такие, как дерево, бетон, кость, кровеносные сосуды и др., состоят из различных, связанных друг с другом материалов. Композитные материалы лишь недавно стали использоваться. Их механические свойства часто превосходят естественные материалы. К композиционным материалам относят железобетон (сочетание бетона и стальной арматуры), железографит (железо и графит), стеклопластик (смесь стеклянных волокон и отвердевшей смолы). В современном строительстве часто древесину смешивают с полимерами, получая композит. Комбинируя объем содержания компонентов, ученые получают материал с требуемой прочностью, жаростойкостью, абразивной стойкостью и другими свойствами. Применение композитов позволяет снизить массу конструкции на 25 – 50%, трудоемкость ее изготовления — в 1,5 – 3 раза. Эти материалы начали использоваться в авто-, судо-, самолетостроении, спортинвентаре, обувной промышленности. Из композитов делают целые строения, аттракционы, офисную и торговую мебель, корпуса медицинских и прочих установок, буровой инструмент. А еще — сверхстойкие сальники и уплотнительные шнуры, электрообогреваемые изделия из углеродных волокон (например, одежду). Из углепластиков делают насосы, трубопроводы, цистерны для агрессивных веществ, подшипники скольжения, работающие без смазки. За счет повышения прочности и упругости деталей конструкций, механизмов возможно увеличение нагрузки, продление срока их службы. На их изготовление тратится меньше материалов и энергии. Знание физики позволяет изменять свойства материалов, меняя их упругость и прочность. 2.1. Установление зависимости силы упругости пружины от её деформации выяснить зависимость силы упругости пружины от её деформации. три пружины различной жёсткости, набор грузов по 100 г, штатив, линейка, миллиметровая бумага. к пружине подвешивается груз и измеряется вызванное им удлинение; к первому грузу поочередно добавляются второй, третий и четвертый, при этом каждый раз измеряется удлинение пружины; опыты повторяются для второй и третьей пружин; по результатам измерений на миллиметровой бумаге строится график зависимости силы упругости от удлинения пружин. Результаты измерений и вычислений:
экспериментальные точки находятся на прямой, проходящей через начало координат, следовательно, модуль силы упругости при растяжении пружины прямо пропорционален её удлинению (величине деформации); экспериментально наблюдаемая закономерность в частном опыте является общей, что подтверждает выдвинутую гипотезу: при упругой деформации любого твердого тела модуль силы упругости прямо пропорционален деформации; мы экспериментально убедились в справедливости закона Гука. 2.2. Расчет жесткости пружины рассчитать жесткость трёх пружин, определить от каких параметров и как зависит жесткость пружины. результаты измерений и вычислений выполненных опытов по формуле k = Fупр. / x, где х = х – х, вычисляется жесткость пружины; по формуле kср = k+ k + k+ k / 4 вычисляется среднее значение жесткости.
Среднее значение жесткости нет необходимости определять, так как вычисленные значения в проведенных опытах совпали. для одной и той же пружины жесткость остается величиной постоянной; для разных пружин жесткость имеет разные значения, следовательно, коэффициент пропорциональности зависит от формы, размеров и материала; чем больше угол наклона графика к оси абсцисс, тем больше жесткость пружины; жесткость характеризует упругие свойства пружины. В курсе школьной физики большое место занимает изучение трёх видов сил: сил всемирного тяготения, сил упругости, сил трения. В работе рассматривается сила упругости, которая возникает при деформации тела. Причиной возникновения этой силы является взаимодействие молекул. На малых расстояниях молекулы отталкиваются, на больших – притягиваются. При деформации расстояния между молекулами увеличиваются или уменьшаются, поэтому начинают преобладать либо силы притяжения, либо силы отталкивания, что приводит к возникновению силы упругости. Сила упругости – это сила электромагнитной природы. Она направлена так, чтобы уменьшить величину деформации. При малых (упругих) деформациях справедлив закон Гука. По удлинению пружины можно определить силу, действующую на неё. Это используется для измерения сил с помощью динамометра. Закон Гука имеет большое значение в природе, технике, в жизни человека. Растения и животные могут выдерживать большие нагрузки. Периодические нагрузки на кости человека стимулируют откладку костной ткани. Если нагрузка будет отсутствовать, то кость станет хрупкой и даже атрофируется. Мышцы способны сокращаться и расслабляться, но благодаря своей эластичности они способны возвращаться к исходным размерам и форме. Любой инструмент испытывает при работе различные виды деформации и при изготовлении рассчитываются на упругие деформации. За счет повышения прочности и упругости деталей конструкций, механизмов возможно увеличение нагрузки, продление срока их службы. На их изготовление тратится меньше материалов и энергии. В практической части работы было доказано, что модуль силы упругости при растяжении пружины прямо пропорционален её удлинению. Экспериментально наблюдаемая закономерность в частном опыте является общей, что подтверждает справедливость закона Гука. Была вычислена жёсткость трёх пружин и определено, от каких параметров зависит этот коэффициент пропорциональности. В ходе выполнения работы были расширены теоретические знания, приобретены экспериментальные и вычислительные навыки по теме «Сила упругости». Эту работу можно использовать в качестве дополнительного материала к урокам физики в 7 классе и для подготовки к итоговой аттестации в 9 классе.
Источники:
- ru.solverbook.com
- obrazovaka.ru
- fizi4ka.ru
- pedtehno.ru

Трактовка понятий
В физике упругая деформация возникает из-за силы, равной по модулю оказываемому воздействию. Сила упругости для пружины (F) пропорциональна её удлинению. Для определения жесткости пружины зависимость записывается математически с помощью следующей формулы: F = k·x; где х — длина предмета после его растяжения, а k — коэффициент жесткости.
Формула считается частным случаем закона Гука, который используется для растяжимого тонкого стержня. Чрезмерное воздействие приводит к появлению разных дефектов. Для процесса характерны некоторые особенности, от чего зависит жесткость пружины:
- геометрические параметры детали;
- срок эксплуатации;
- значение коэффициента k, который при определённых условиях способствует снижению сжатия и сохранению силы на одинаковом уровне;
- тип используемого материала (сталь, сплав) в процессе изготовления пружины.
На практических занятиях по физике в 7 классе применяются изделия разных типов. В автомобилестроении используется цветовое обозначение. Для расчета коэффициента жесткости пружины специалисты ориентируются на формулу k=Gd 4 /8D 3 n, где:
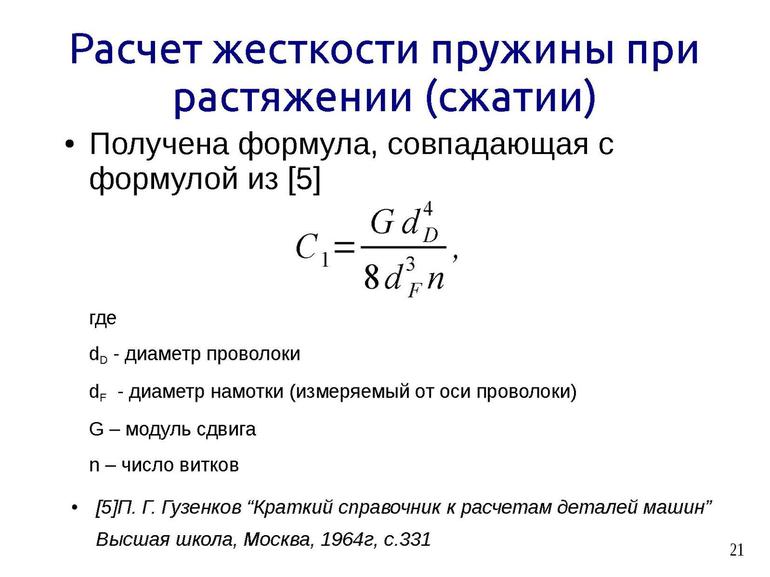
- G — определяет модуль сдвига (свойство зависит, к примеру, от используемого сырья);
- d — диаметр куска проволоки (величина определяется в период производства путём проката, а результат записывается в технической документации);
- D — диаметр витков, которые получаются в результате намотки на проволоку (расчет осуществляется с учетом поставленных задач и зависит от нагрузки, оказываемой для сжатия объекта);
- n — количество витков в системе (показатель варьируется в значительном диапазоне, от чего зависят эксплуатационные характеристики предмета).
С помощью формулы может измеряться жёсткость цилиндрической пружины, используемой в разных механизмах. Показатель измеряется в Ньютонах и обозначается Н.
Практические занятия
Механики и физики обозначают с помощью k, c и D коэффициент упругости, пропорциональности, жесткости. Смысл математической записи одинаковый. Численно показатель равняется силе, которая создаёт колебания на одну единицу длины. На практических работах по физике используется в качестве последней величины 1 метр.
Чем выше k, тем больше сопротивление предмета относительно деформации. Дополнительно коэффициент показывает степень устойчивости тела к колебаниям со стороны внешней нагрузки. Параметр зависит от длины и диаметра винтового изделия, количества витков, сырья. Единица измерения жесткости пружины — Н/м.
На практике перед школьниками и механиками может стоять более сложная задача, к примеру, найти общую жёсткость. В таком случае пружины соединены последовательным либо параллельным способом. В первом случае уменьшается суммарная жесткость. Если пружины расположены последовательно, используется следующая формула: 1/k = 1/k1 + 1/k2 + … + 1/ki, где:
- k — суммарная жёсткость соединений;
- k1 …ki — жёсткость каждого элемента системы;
- i — число пружин в цепи.
Если невесомые (расположены горизонтально) предметы соединены параллельно, значение общего k будет увеличиваться. Величина вычисляется по следующей формуле: k = k1 + k2 + … + ki.
Основная методика для вычислений
На практике коэффициент Гука определяется самостоятельно. Для эксперимента потребуется пружина, линейка, груз с определённой массой. Необходимо соблюдать следующую последовательность действий:
- Пружина фиксируется вертикально. Для этого используется любая удобная опора со свободной нижней частью.
- Линейкой измеряется длина предмета. Результат записывается как х1.
- На свободный конец подвешивается груз с известной массой m.
- Измеряется длина изделия под воздействием амплитуды. Вывод записывается как х2.
- Производит подсчёт абсолютного удлинения: x = x2-x1. Для определения энергии (силы) и k в международной системе СИ осуществляется перевод длины из разных единиц измерения в метры.
- Сила, спровоцировавшая деформацию, считается силой тяжести тела. Она рассчитывается по формуле: F = mg, где м является массой используемого груза (вес переводится в килограммы), а g (равен 9,8) — постоянная величина, с помощью которой отмечается ускорение свободного падения.
Если вышеописанные вычисления произведены, необходимо найти значение коэффициента жёсткости. Используется закон Гука, из которого следует, что k=F/x.
Решение задач
Для нахождения жёсткости в случае использования разных предметов, включая пружинные маятники с разной частотой колебаний, применяется формула Гука либо следствие, вытекающее из неё.
Задача № 1. Пружина имеет длину 10 см. На неё оказывается сила в 100 Н. Изделие растянулось на 14 см. Нужно найти k.
Решение: предварительно вычисляется абсолютное удлинение: 14−10=4 см. Результат переводится в метры: 0,04 м. Используя основную формулу, находится k. Его значение равняется 2500 Н/м.
Задача № 2. На пружину подвешивается груз массой 10 кг. Изделие растягивается на 4 см. Нужно найти длину, на которую растянется пружина, если использовать груз массой в 25 кг.
Решение: Определяется сила тяжести путем умножения 10 кг на 9.8. Результат записывается в Ньютонах. Определяется k=98/0.04=2450 Н/м. Рассчитывается, с какой силой воздействует второй груз: F=mg=245 Н. Для нахождения абсолютного удлинения используется формула x=F/k. Во втором случае х равняется 0,1 м.
Применение цилиндрических пружин
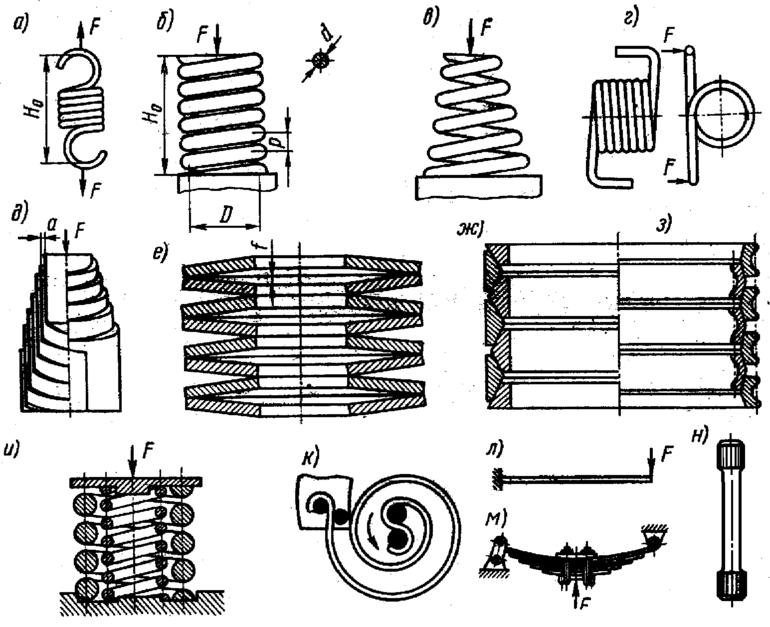
На производстве наиболее востребованы цилиндрические пружины, так как они обладают уникальными особенностями. При создании системы отмечается центральная ось, вдоль которой действуют разные силы. В процессе изготовления подобных изделий используется проволока соответствующего диаметра.
Для её изготовления понадобится специальный сплав либо обычные металлы. Сам материал должен обладать высокой упругостью. Проволока может иметь витки одного диаметра либо разных радиусов. Большим спросом пользуются цилиндрическая пружина, которая в сжатом состоянии обладает незначительной толщиной.
Главными параметрами изделия считаются:
- малый, средний и большой диаметр витков и самой проволоки;
- шаг размещения отдельный колец.
В задачах по физике вычисляется k для двух состояний: растяжение и сжатие. В любом случае используется одна формула для определения величины. Разница понятий:
- Исполнение, рассчитанное на сжатие, характеризуется дальним размещением витков. Расстояние, образуемое между ними, появляется возможность на сжатие.
- Модель, связанная с растяжением, имеет кольца, расположенные плотно между собой. Такая форма определяет то, что при максимальной силе растяжение минимальное.
Отдельно рассматриваются варианты на изгиб и кручение. Такие детали рассчитываются по специальным формулам. Для разных соединений характерны определённые особенности. Чтобы провести определения растяжения, учитывается момент теста.
Показатель зависит от характеристик проволоки, оказываемой силы либо массы тела. Для всех систем используются разные формулы, но полученные результаты не имеют погрешностей. Чтобы провести тесты для вычисления основных параметров, используется специальное оборудование. Простые задачи с деформацией пружин решают ученики на уроках физике в 7−8 классе. О параллельном и последовательном соединении элементов системы узнают учащиеся старших классов.
-
По результатам
проведенных измерений построить
проходящий через начало координат
график зависимости квадрата периода
колебании
от массы m,
предварительно рассчитав
 ,
,
для каждого значения m.
Выбрав одну из полученных в эксперименте
точек, лежащую на усредненной прямой,
рассчитать коэффициент жесткости
пружины по формуле

-
Оценить погрешность
полученного результата. В предположении,
что ошибка в определении числа колебаний
отсутствовала, эту погрешность можно
рассчитать по формуле
 .
.
Ошибка определения
времени 10 колебаний определяется как
![]() .
.
Систематическую
погрешность определения времени ![]() ,
,
связанную с конечной скоростью реакции
человека, можно
принять
равной 0,1
с (т. к.
непосредственно
приборной
ошибкой в нашем случае можно пренебречь
по сравнению с этой величиной).
Случайную ошибку
![]()
следует рассчитать по методу Стьюдента:
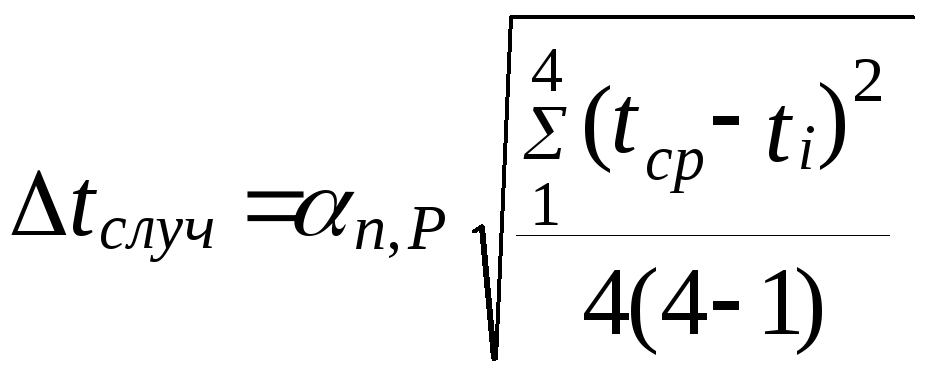 .
.
Для числа колебаний
n=4
и доверительной вероятности P=0,95
=3,2![]() Окончательный
Окончательный
результат записать в таблицу2.
Сравнить полученное значение коэффициента
жесткости пружины с результатом,
полученным ранее.
Расчет коэффициента жесткости с использованием эвм
(задание для
УИРС)
Из теории пружинного
маятника следует (см. формулу 5), что
график зависимости ![]()
представляет прямую, проходящую через
начало координат. Для построения этой
прямой наилучшим образом следует
воспользоваться методом наименьших
квадратов (МНК). Специальная программа
для ЭВМ позволит рассчитать ![]()
и стандартное отклонение![]() .
.
КОНТРОЛЬНЫЕ
ВОПРОСЫ
1. Какие деформации
называются упругими? Сформулируйте
закон Гука.
2. Какие колебания
называются свободными?
3. Составьте
дифференциальное уравнение колебаний
груза на пружине. Какой вид имеет решение
этого уравнения?
4. Получите формулу
для периода колебаний пружинного
маятника.
5. Чем можно объяснить
различие в
значениях
коэффициента жесткости, полученных
разными методами?
СПИСОК ЛИТЕРАТУРЫ
1. А. А. Детлаф, Б.
М. Яворский. Курс физики,М.:
Высш. шк., 2000.
2.И.
В. Савельев. Курс физики.
М.: Наука 1998
Т.
2.
3.Методические
указания к вводному занятию по физическому
практи – куму. – М.: Изд. МИИТ, 1995.
Работа 5
ИЗУЧЕНИЕ СВОБОДНЫХ
КОЛЕБАНИЙ
ФИЗИЧЕСКОГО
МАЯТНИКА
Цель работы.
Определение момента инерции физического
маятника по периоду его малых колебании
и приведенной длине.
Введение
Физическим маятником
называется любое тело, совершающее
колебания под действием силы тяжести
вокруг горизонтальной оси, не проходящей
через центр инерции тела. Всегда можно
подобрать математический маятник,
синхронный данному физическому, т. е.
такой математический маятник, период
колебаний которого равен периоду
колебаний физического маятника. Длина
такого математического маятника
называется приведенной длиной физического
маятника.
Выведем формулу
периода колебаний физического маятника.
На рис. 4 точка О — обозначает горизонтальную
ось вращения, точка В — центр тяжести
физического маятника. Следует отметить,
что в однородном поле сил тяжести центр
инерции тела и его центр тяжести
совпадают.
Относительно оси
вращения сила тяжести создает вращающий
момент, стремящийся возвратить маятник
в
положение
равновесия. Численное значение этого
момента определяется соотношением
![]() (1)
(1)
где m—масса
физического маятника, d—кратчайшее
расстояние от
оси вращения до центра тяжести маятника,
![]() —угловое
—угловое
перемещение тела, отсчитываемое от
положения равновесия. При малых ![]()
угловое перемещение можно рассматривать
как вектор, лежащий на оси вращения,
направление которого связано с
направлением поворота тела из положения
равновесия в заданное правилом правого
винта.
Учитывая, что
векторы
![]()
и ![]()
антипараллельны, следует величинам
проекций вращающего момента и углового
перемещения на ось вращения приписать
противоположные знаки. Тогда формула
(1)
примет вид
![]() .
.
(1а)
При малых углах
можно принять ![]() ,
,
если ![]()
выражено в радианах, и записать формулу
(1а)
следующим образом
![]() .
.
(2)
Используем основной
закон динамики вращательного движения
тела относительно неподвижной оси,
записав его в проекциях на ось вращения:
![]() (3)
(3)
где J
— момент инерции тела относительно оси
вращения, а![]() —угловое
—угловое
ускорение, причем  .
.
![]() Подставляя
Подставляя
в формулу (3)
момент силы из формулы (2),
получим уравнение движения маятника
 .
.
(4)
Решение полученного
дифференциального уравнения второго
порядка с постоянными коэффициентами
можно записать в виде
![]() ,
,
(5)
где  ,
,
а ![]()
и ![]() —постоянные,
—постоянные,
определяемые начальными условиями.
Величины
![]()
и
![]()
называют соответственно амплитудой и
фазой колебания, а 0—начальной
фазой. Уравнение (5)
является уравнением гармонического
колебательного движения, а величина 0
собственной циклической частотой
колебания. По истечении времени 
фаза
получает приращение![]() ,
,
а тело возвращается в исходное положение
с сохранением направления движения.
Величина
T0
называется
собственным периодом колебания. Таким
образом, период колебания физического
маятника определяется формулой
 (6)
(6)
Известно, что
период колебаний математического
маятника записывается в виде
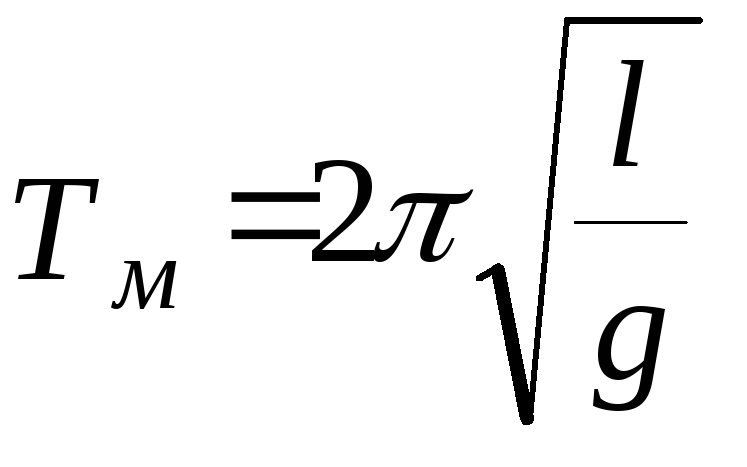 .
.
Сравнивая эту
формулу с формулой (6),
делаем вывод, что математический маятник
будет иметь тот же период колебаний,
что и данный физический, если длина
математического маятника
 .
.
(7)
Это и есть формула
приведенной длины
![]()
физического маятника.
Соседние файлы в папке 4-5-5aNEW
- #
- #
Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
