Содержание:
- Формула
- Примеры вычисления интеграла константы
Формула
Интеграл константы равен произведению этой константы на переменную интегрирования плюс постоянная интегрирования.
Этот факт получается на основании
свойств неопределенного интеграла, а именно, что константу
можно выносить за знак интеграла и знак интеграла уничтожает знак дифференциала.
Примеры вычисления интеграла константы
Пример
Задание. Найти неопределенный интеграл $int 2dx$
Решение. Согласно формуле имеем, что
$$int 2 d x=2 x+C$$
Ответ. $int 2 d x=2 x+C$
Пример
Задание. Найти интеграл $int (pi – 1)dx$
Решение. Искомый интеграл равен
$$int(pi-1) d x=(pi-1) x+C$$
Ответ. $int(pi-1) d x=(pi-1) x+C$
Читать дальше: интеграл степенной функции.
Постоянная интегрирования является дополнительным значением для вычисления первообразных или интегралов, он служит для представления решений , которые составляют примитив функции. Он выражает внутреннюю неоднозначность, когда любая функция имеет бесконечное количество примитивов.
Например, если мы возьмем функцию: f (x) = 2x + 1 и получим ее первообразную:
∫ (2x + 1) dx = x 2 + x + C ; Где C – постоянная интегрирования и графически представляет вертикальный переход между бесконечными возможностями примитива. Правильно сказать, что (x 2 + x) – одна из примитивов f (x).

Источник: автор
Точно так же мы можем определить (x 2 + x + C ) как примитив f (x).
Обратное свойство
Можно отметить, что при выводе выражения (x 2 + x) получается функция f (x) = 2x + 1. Это связано с обратным свойством, существующим между выводом и интегрированием функций. Это свойство позволяет получать формулы интегрирования, начиная с дифференцирования. Это позволяет проверять интегралы через те же производные.

Источник: автор
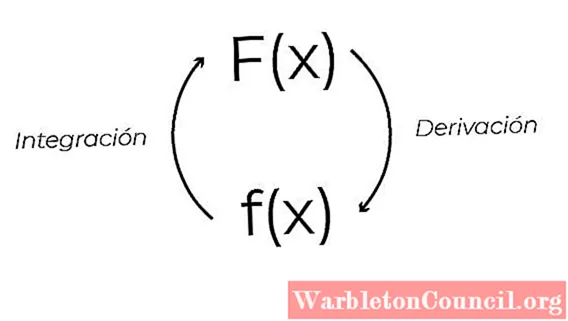
Однако (x 2 + x) – не единственная функция, производная которой равна (2x + 1).
- d (x 2 + x) / dx = 2x + 1
- d (x 2 + x + 1) / dx = 2x + 1
- d (x 2 + x + 2) / dx = 2x + 1
- d (x 2 + x + 3) / dx = 2x + 1
- d (x 2 + x + C ) / dx = 2x + 1
Где 1, 2, 3 и 4 представляют конкретные примитивы f (x) = 2x + 1. В то время как 5 представляет неопределенный или примитивный интеграл f (x) = 2x + 1.

Источник: автор
Примитивы функции достигаются с помощью антидеривации или интегрального процесса. Где F будет примитивом f, если верно следующее
- y = ∫ f (x) dx = F (x) + C; C = постоянная интегрирования
- F ‘(х) = f (х)
Можно видеть, что функция имеет единственную производную, в отличие от ее бесконечных примитивов, полученных в результате интегрирования.
Неопределенный интеграл
∫ f (x) dx = F (x) + C
Он соответствует семейству кривых с одинаковым рисунком, которые испытывают несоответствие в значениях изображений каждой точки (x, y). Каждая функция, которая выполняет этот шаблон, будет отдельным примитивом, а набор всех функций известен как неопределенный интеграл.
Значение константы интегрирования будет тем, которое отличает каждую функцию на практике.
Постоянная интегрирования предполагает вертикальное смещение во всех графиках , представляющих примитивы функции. Где наблюдается параллельность между ними, и то, что C – величина смещения.
Согласно общепринятой практике, постоянная интегрирования обозначается буквой «C» после добавления, хотя на практике это не имеет значения, добавляется или вычитается константа. Его реальную стоимость можно найти разными способами при разных начальных условиях .
Другие значения постоянной интеграции
Уже обсуждалось, как постоянная интегрирования применяется в области интегрального исчисления ; Представление семейства кривых, определяющих неопределенный интеграл. Но многие другие науки и отрасли приписали очень интересные и практические значения константе интеграции, которые способствовали развитию множества исследований.
В физике постоянная интегрирования может принимать несколько значений в зависимости от характера данных. Очень распространенный пример – знание функции V (t), которая представляет скорость частицы в зависимости от времени t. Известно, что при вычислении примитива V (t) получается функция R (t), которая представляет положение частицы во времени.
Постоянная интегрирования будет представлять значение начальной позиции, то есть в момент времени Т = 0.
Таким же образом, если известна функция A (t), которая представляет ускорение частицы во времени. Примитив A (t) приведет к функции V (t), где постоянная интегрирования будет значением начальной скорости V 0 .
В экономике : путем интегрирования примитива функции стоимости. Постоянная интегрирования будет представлять постоянные затраты. И так много других приложений, заслуживающих дифференциального и интегрального исчисления.
Как рассчитывается постоянная интегрирования?
Для расчета постоянной интегрирования всегда необходимо знать начальные условия . Которые отвечают за определение того, какой из возможных примитивов является соответствующим.
Во многих приложениях она рассматривается как независимая переменная в момент времени (t), где константа C принимает значения, которые определяют начальные условия конкретного случая.
Если взять исходный пример: ∫ (2x + 1) dx = x 2 + x + C
Допустимое начальное условие может заключаться в том, что график проходит через определенную координату. Например, мы знаем, что примитив (x 2 + x + C) проходит через точку (1, 2)
F (х) = х 2 + х + С; это общее решение
F (1) = 2
Подставим в это равенство общее решение
F (1) = (1) 2 + (1) + C = 2
Отсюда легко следует, что C = 0
Таким образом, соответствующий примитив для этого случая равен F (x) = x 2 + x
Есть несколько типов числовых упражнений, которые работают с константами интегрирования . Фактически, дифференциальное и интегральное исчисление не перестают применяться в современных исследованиях. Их можно найти на разных академических уровнях; от первоначального расчета, через физику, химию, биологию, экономику и другие.
Это также ценится при изучении дифференциальных уравнений , где постоянная интегрирования может принимать разные значения и решения, это связано с множественными выводами и интегрированиями, которые выполняются в этом вопросе.
Примеры
Пример 1
- Пушка высотой 30 метров стреляет вертикально вверх. Известно, что начальная скорость снаряда составляет 25 м / с. Решать:
- Функция, определяющая положение снаряда по времени.
- Время полета или момент времени, когда частица падает на землю.
Известно, что при прямолинейном движении, равномерно изменяющемся, ускорение является постоянной величиной. Это случай запуска снаряда, где ускорение будет равным гравитации.
g = – 10 м / с 2
Также известно, что ускорение – это вторая производная от положения, что указывает на двойное интегрирование в разрешающей способности упражнения, таким образом получая две константы интегрирования.
А (т) = -10
V (t) = ∫A (t) dt = ∫ (-10t) dt = -10t + C 1
Исходные условия упражнения указывают, что начальная скорость V 0 = 25 м / с. Это скорость в момент времени t = 0. Таким образом выполняется следующее:
V (0) = 25 = -10 (0) + C 1 и C 1 = 25
С определенной функцией скорости
V (t) = -10t + 25; Сходство можно наблюдать с формулой MRUV (V f = V 0 + axt)
Аналогичным образом функция скорости интегрируется, чтобы получить выражение, определяющее положение:
R (t) = ∫V (t) dt = ∫ (-10t + 25) dt = -5t 2 + 25t + C 2
R (t) = -5t 2 + 25t + C 2 (примитив позиции)
Начальное положение R (0) = 30 м известно. Затем вычисляется конкретный примитив снаряда.
R (0) = 30m = -5 (0) 2 + 25 (0) + C 2 . Где C 2 = 30
Пример 2
- Найдите примитив f (x), удовлетворяющий начальным условиям:
- f ” (x) = 4; f ‘(2) = 2; f (0) = 7
При информации о второй производной f ” (x) = 4 начинается процесс антидеривации
f ‘(x) = ∫f’ ‘(x) dx
∫4 dx = 4x + C 1
Затем, зная условие f ‘(2) = 2, переходим:
4 (2) + С 1 = 2
C 1 = -6 и f ‘(x) = 4x – 8
Таким же образом поступаем и со второй постоянной интегрирования
f (x) = ∫f ‘(x) dx
∫ (4x – 8) dx = 2x 2 – 8x + C 2
Начальное условие f (0) = 7 известно и приступаем:
2 (0) 2 – 8 (0) + С 2 = 7
C 2 = 7 и f (x) = 2x 2 – 8x + 7
- f ” (х) = х 2 ; f ‘(0) = 6; f (0) = 3
Аналогично предыдущей задаче мы определяем первые производные и исходную функцию из начальных условий.
f ‘(x) = ∫f’ ‘(x) dx
∫ (х 2 ) ах = (х 3 /3) + С 1
При условии f ‘(0) = 6 поступаем:
(0 3/3 ) + C 1 = 6; Где C 1 = 6 и Р «(х) = (х 3 /3) + 6
Тогда вторая постоянная интегрирования
f (x) = ∫f ‘(x) dx
∫ дх = (х 4 /12) + 6x + С 2
Начальное условие f (0) = 3 известно и приступаем:
+ 6 (0) + C 2 = 3; Где C 2 = 3
Таким образом, мы получаем примитивное частное
F (X) = (х 4 /12) + 6x + 3
Пример 3
- Определите примитивные функции с учетом производных и точки на графике:
- dy / dx = 2x – 2, который проходит через точку (3, 2)
Важно помнить, что производные относятся к наклону касательной к кривой в данной точке. Где некорректно предполагать, что график производной касается указанной точки, поскольку она принадлежит графику примитивной функции.
Таким образом, мы выражаем дифференциальное уравнение следующим образом:
∫dy = ∫ (2x – 2) dx
Применение начального условия:
2 = (3) 2 – 2 (3) + С
С = -1
Получается: f (x) = x 2 – 2x – 1
- dy / dx = 3x 2 – 1, который проходит через точку (0, 2)
Выразим дифференциальное уравнение следующим образом:
Применение начального условия:
2 = (0) 2 – 2 (0) + C
С = 2
Получаем: f (x) = x 3 – x + 2
Предлагаемые упражнения
Упражнение 1
- Найдите примитив f (x), удовлетворяющий начальным условиям:
- f ” (х) = х; f ‘(3) = 1; f (2) = 5
- е ” (х) = х + 1; f ‘(2) = 2; f (0) = 1
- f ” (x) = 1; f ‘(2) = 3; f (1) = 10
- е ” (х) = -х; f ‘(5) = 1; f (1) = -8
Упражнение 2.
- Воздушный шар, поднимающийся со скоростью 16 футов / с, сбрасывает мешок с песком с высоты 64 футов над уровнем земли.
- Определите время полета
- Каким будет вектор V f, когда он упадет на землю?
Упражнение 3.
- На рисунке показан график ускорения-времени автомобиля, движущегося в положительном направлении оси x. Автомобиль двигался с постоянной скоростью 54 км / ч, когда водитель нажал на тормоза и остановился за 10 секунд. Определение:
- Начальный разгон автомобиля
- Скорость автомобиля при t = 5с
- Смещение автомобиля при торможении

Источник: автор
Упражнение 4.
- Определите примитивные функции с учетом производных и точки на графике:
- dy / dx = x, который проходит через точку (-1, 4)
- dy / dx = -x 2 + 1, который проходит через точку (0, 0)
- dy / dx = -x + 1, который проходит через точку (-2, 2)
Ссылки
- Интегральное исчисление. Неопределенный интеграл и методы интегрирования. Уилсон, Веласкес Бастидас. Университет Магдалены 2014
- Стюарт, Дж. (2001). Расчет переменной. Ранние трансцендентальные. Мексика: Thomson Learning.
- Хименес, Р. (2011). Математика VI. Интегральное исчисление. Мексика: Pearson Education.
- Физика И. Мак Гроу Хилл
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 30 сентября 2022 года; проверки требует 1 правка.
В математическом анализе неопределенный интеграл от заданной функции (то есть множества всех первообразных функции) в связанной области определяется только с точностью до аддитивной постоянной константы интегрирования. Эта константа выражает неоднозначность, присущую при взятии первообразных. 


Происхождение[править | править код]
Производная любой постоянной функции равна нулю. Если для функции 

Пусть 



![{displaystyle [F(x)-G(x)]'=0}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bf7a4d471877352525d86a56c595661d3061ae30)


следовательно, F постоянная функция.
Два факта имеют решающее значение в этом доказательстве. Во-первых, настоящая линия связана. Если бы действительная линия не была связана, мы не всегда могли бы интегрировать от нашего фиксированного a до любого данного x. Например, если бы мы взяли функции, определённые для объединения интервалов [0,1] и [2,3], и если бы a было 0, то было бы невозможно интегрировать от 0 до 3, потому что функция не определено между 1 и 2. Здесь будут две константы, по одной для каждого подключенного компонента домена. В общем случае, заменяя константы локально постоянными функциями, мы можем распространить эту теорему на несвязные области. Например, есть две константы интеграции для 


Во-вторых, предполагалось, что F и G всюду дифференцируемы. Если F и G не дифференцируемы хотя бы в одной точке, теорема не выполняется. В качестве примера, давайте 
Например, предположим, что кто-то хочет найти первообразные 



Оказывается, что сложение и вычитание констант — это единственная гибкость, которую мы имеем при поиске различных первообразных одной и той же функции. То есть все первообразные одинаковые с точностью до константы. Чтобы выразить этот факт для cos(x), мы пишем:

Замена С на число произведет первообразную. Однако, написав C вместо числа, получается компактное описание всех возможных первообразных cos(x). C называется константой интегрирования. Легко определить, что все эти функции действительно являются производными от 
![{displaystyle {begin{aligned}{frac {d}{dx}}[sin(x)+C]&={frac {d}{dx}}[sin(x)]+{frac {d}{dx}}[C]\&=cos(x)+0\&=cos(x)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b1d6e937d807c850a5d5f320952900b934be5587)
Необходимость[править | править код]
На первый взгляд может показаться, что константа не нужна, поскольку её можно обнулить. Кроме того, при оценке определённых интегралов с использованием фундаментальной теоремы математического анализа постоянная всегда будет аннулироваться сама собой. Однако попытка установить константу равной нулю не всегда имеет смысл. Например, 

Таким образом, обнуление C все ещё может оставить константу. Это означает, что для данной функции не существует «Простейшей Первообразной».
Другая проблема с установкой C равным нулю состоит в том, что иногда мы хотим найти первообразные, которые имеют заданное значение в данной точке (как в задаче с начальным значением). Например, чтобы получить первообразную 
Это ограничение можно перефразировать на языке дифференциальных уравнений. Нахождение неопределенного интеграла функции 

Есть ещё одно обоснование, исходя из абстрактной алгебры. Пространство всех (подходящих) вещественных функций на действительных числах является векторным пространством, а дифференциальный оператор 
Физический смысл[править | править код]
Рассмотрим некоторые примеры.
- Тело падает с пятого этажа дома на землю, пролетая некоторое расстояние. Затем то же самое тело падает с девятого этажа на балкон пятого и пролетает то же самое расстояние, несмотря на разницу начального положения. Изменением силы тяжести на высоте дома пренебрегаем. В данном примере постоянная интегрирования задаёт начальное положение тела (номер этажа).
- Автомобиль едет по прямой трассе с некоторой переменной скоростью. Если в начале движения переставить автомобиль в другое место трассы, он проедет тот же путь.
- Лошадь везёт сани по ровному полю. Независимо от того, в каком месте поля находится лошадь, она проделает одинаковую работу по перетаскиванию саней (расстояние, пройденное лошадью, должно быть одинаково).
- Вода выливается из цилиндрического сосуда через отверстие в дне. Уровень в сосуде понижается на 10 см. Независимо от того, до какого уровня сосуд был наполнен изначально, одинаковый объём истекшей воды понижает уровень на 10 см.
- Напряжение на конденсаторе меняется от 1 вольта до 0 вольт. Затем напряжение на том же конденсаторе меняется от 1000 вольт до 999 вольт. В обоих случаях прошедший через конденсатор заряд одинаков.
- Тело остывает с 1°С до 0°С. То же тело остывает с 1000°С до 999°С. Если пренебречь зависимостью теплоемкости от температуры, то тело в обоих случаях теряет одинаковое количество тепла.
- Известна шуточная школьная загадка, хорошо иллюстрирующая обсуждаемый предмет: Буратино дал Папе Карло два яблока, а Мальвине три. Сколько яблок было у Буратино? Ответ “пять” неверен. У Буратино изначально мог быть десяток яблок (или несколько десятков). Тогда ответ – пятнадцать, или какой угодно другой, зависящий от начальных условий.
Литература[править | править код]
- Stewart, James (2008). Calculus: Early Transcendentals (6th ed.). Brooks/Cole. ISBN 0-495-01166-5.
- Larson, Ron; Edwards, Bruce H. (2009). Calculus (9th ed.). Brooks/Cole. ISBN 0-547-16702-4.
- «Reader Survey: log|x| + C», Tom Leinster, The n-category Café, March 19, 2012\\\\\\\
- Banner, Adrian (2007). The calculus lifesaver : all the tools you need to excel at calculus. Princeton [u.a.]: Princeton University Press. p. 380. ISBN 978-0-691-1308
Содержание
- Обратное свойство
- Неопределенный интеграл
- Другие значения постоянной интеграции
- Как рассчитывается постоянная интегрирования?
- Примеры
- Пример 1
- Пример 2
- Пример 3
- Предлагаемые упражнения
- Упражнение 1
- Упражнение 2.
- Упражнение 3.
- Упражнение 4.
- Ссылки
В постоянная интеграции Это дополнительная ценность для вычисления первообразных или интегралов, она служит для представления решений, составляющих примитив функции. Он выражает внутреннюю неоднозначность, когда любая функция имеет бесконечное количество примитивов.
Например, если мы возьмем функцию: f (x) = 2x + 1 и получим ее первообразную:
∫ (2x + 1) dx = х2 + х + C ; куда C это постоянная интеграции и графически представляет вертикальный переход между бесконечными возможностями примитива. Правильно сказать, что (x2 + x) есть а примитивов f (x).
Таким же образом вы можете определить (x2 + х + C ) как примитив f (x).
Обратное свойство
Можно отметить, что при выводе выражения (x2 + x), мы получаем функцию f (x) = 2x + 1. Это связано с обратным свойством, существующим между выводом и интегрированием функций. Это свойство позволяет получать формулы интегрирования, начиная с дифференцирования. Это позволяет проверять интегралы через те же производные.
Однако (x2 + x) – не единственная функция, производная которой равна (2x + 1).
- d (Икс2 + х) / dx = 2x + 1
- d (Икс2 + х + 1) / dx = 2x + 1
- d (Икс2 + х + 2) / dx = 2x + 1
- d (Икс2 + х + 3) / dx = 2x + 1
- d (Икс2 + х + C) / dx = 2x + 1
Где 1, 2, 3 и 4 представляют конкретные примитивы f (x) = 2x + 1. В то время как 5 представляет неопределенный или примитивный интеграл f (x) = 2x + 1.
Примитивы функции получаются посредством первичного или интегрального процесса. Где F будет примитивом f, если верно следующее
- у = ∫ f (x) dx= F (х) + С; C = постоянная интеграции
- F ’(x) = f (x)
Можно видеть, что функция имеет единственную производную, в отличие от ее бесконечных примитивов, полученных в результате интегрирования.
Неопределенный интеграл
∫ f (x) dx = F (x) + C
Он соответствует семейству кривых с одинаковым рисунком, которые испытывают несоответствие в значениях изображений каждой точки (x, y). Каждая функция, отвечающая этому шаблону, будет отдельным примитивом, а набор всех функций известен как неопределенный интеграл.
Ценность постоянная интеграции именно он отличает каждую функцию на практике.
В постоянная интеграции предлагает вертикальный сдвиг на всех графиках, которые представляют примитивы функции. Где наблюдается параллелизм между ними, и то, что C это значение смещения.
Согласно общепринятой практике постоянная интеграции он обозначается буквой «C» после добавления, хотя на практике не имеет значения, добавляется или вычитается константа. Его реальную ценность можно найти разными способами в зависимости от первоначальные условия.
Другие значения постоянной интеграции
Уже говорилось о том, как постоянная интеграции применяется в отрасли интегральное исчисление; Представление семейства кривых, определяющих неопределенный интеграл. Но многие другие науки и отрасли приписывают очень интересные и практические ценности постоянная интегрирования, которые способствовали развитию множества исследований.
в физический константа интегрирования может принимать несколько значений в зависимости от характера данных. Очень распространенный пример – знание функции V (т) который представляет собой скорость частицы в зависимости от времени t. Известно, что при вычислении примитива V (t) функция получается R (t) который представляет собой позиция частицы против времени.
В постоянная интеграции он будет представлять значение начальной позиции, то есть в момент t = 0.
Аналогично, если функция известна В) который представляет собой ускорение частицы против времени. Примитив A (t) приведет к функции V (t), где постоянная интеграции будет значением начальной скорости V0.
в экономия, получая посредством интегрирования примитив функции стоимости. В постоянная интеграции будут представлять собой постоянные затраты. И так много других приложений, заслуживающих дифференциального и интегрального исчисления.
Как рассчитывается постоянная интегрирования?
Для расчета постоянная интегрирования, всегда будет необходимо знать первоначальные условия. Которые отвечают за определение того, какой из возможных примитивов является соответствующим.
Во многих приложениях он рассматривается как независимая переменная в момент времени (t), где постоянная C принимает значения, которые определяют первоначальные условия конкретного случая.
Если взять исходный пример: ∫ (2x + 1) dx = x2 + х + C
Допустимое начальное условие может заключаться в том, что график проходит через определенную координату. Например, известно, что примитив (x2 + х + C) проходит через точку (1, 2)
F (х) = х2 + х + C; это общее решение
F (1) = 2
Подставим в это равенство общее решение
F (1) = (1)2 + (1) + С = 2
Отсюда легко следует, что C = 0
Таким образом, соответствующий примитив для этого случая есть F (х) = х2 + х
Есть несколько типов числовых упражнений, которые работают с константы интегрирования. Фактически, дифференциальное и интегральное исчисление не перестают применяться в современных исследованиях. Их можно найти на разных академических уровнях; от первоначального расчета, через физику, химию, биологию, экономику и другие.
Это также видно при изучении дифференциальные уравнения, где постоянная интеграции Он может принимать разные значения и решения, это связано с многочисленными производными и интеграциями, которые выполняются в этом вопросе.
Примеры
Пример 1
- Пушка высотой 30 метров стреляет вертикально вверх. Известно, что начальная скорость снаряда составляет 25 м / с. Принимать решение:
- Функция, определяющая положение снаряда по времени.
- Время полета или момент, когда частица падает на землю.
Известно, что при прямолинейном движении, равномерно изменяющемся, ускорение является постоянной величиной. Это случай запуска снаряда, где ускорение будет равным гравитации.
g = – 10 м / с2
Также известно, что ускорение – это вторая производная от положения, что указывает на двойное интегрирование в разрешении упражнения, таким образом, получая два константы интегрирования.
А (т) = -10
V (t) = ∫A (t) dt = ∫ (-10t) dt = -10t + C1
Начальные условия упражнения указывают на то, что начальная скорость равна V0 = 25 м / с. Это скорость в момент времени t = 0. Таким образом выполняется следующее:
V (0) = 25 = -10 (0) + C1 Y C1= 25
С определенной функцией скорости
V (t) = -10t + 25; Сходство с формулой MRUV (VF = V0 + а х т)
Аналогичным образом мы продолжаем интегрировать функцию скорости, чтобы получить выражение, определяющее положение:
R (t) = ∫V (t) dt = ∫ (-10t + 25) dt = -5t2 + 25т + C2
R (t) = -5t2 + 25т + C2 (примитив позиции)
Начальное положение R (0) = 30 м известно. Затем вычисляется конкретный примитив снаряда.
R (0) = 30 м = -5 (0)2 + 25(0) + C2 . куда C2 = 30
Первый раздел разрешен, так как R (t) = -5t2 + 25т + 30 ; Это выражение гомологично формуле смещения в MRUV R (t) = R0 + V0т – гт2/2
Для второго раздела необходимо решить квадратное уравнение: -5t2 + 25т + 30 = 0
Поскольку это заставляет частицу достигнуть земли (позиция = 0)
Фактически, уравнение 2-й степени дает нам 2 решения T: {6, -1}. Значение t = -1 игнорируется, потому что это единицы времени, домен которых не включает отрицательные числа.
Таким образом решается второй участок, где время полета равно 6 секундам.
Пример 2
- Найдите примитив f (x), удовлетворяющий начальным условиям:
- f ” (x) = 4; f ‘(2) = 2; f (0) = 7
Когда информация о второй производной f ’’ (x) = 4, начинается процесс антидеривации.
f ’(x) = ∫f’ ’(x) dx
∫4 dx = 4x + C1
Затем, зная условие f ‘(2) = 2, переходим:
4 (2) + С1 = 2
C1 = -6 и f ’(x) = 4x – 8
Проделайте то же самое для второго постоянная интеграции
f (x) = ∫f ’(x) dx
∫ (4x – 8) dx = 2x2 – 8x + С2
Начальное условие f (0) = 7 известно и приступаем:
2(0)2 – 8 (0) + С2 = 7
C2 = 7 и f (x) = 2x2 – 8x + 7
- f ’’ (x) = x2 ; f ‘(0) = 6; f (0) = 3
Аналогично предыдущей задаче мы определяем первые производные и исходную функцию из начальных условий.
f ’(x) = ∫f’ ’(x) dx
∫ (х2) dx = (x3/ 3) + С1
При условии f ‘(0) = 6 переходим:
( 03/ 3) + С1 = 6; куда1 = 6 и f ’(x) = (x3/3 ) + 6
Затем второй постоянная интеграции
f (x) = ∫f ’(x) dx
∫ [(x3/ 3) + 6] dx = (x4/ 12) + 6x + С2
Начальное условие f (0) = 3 известно и приступаем:
[(0)4/ 12] + 6 (0) + C2 = 3; куда2 = 3
Таким образом, мы получаем примитивное частное
f (x) = (Икс4/ 12) + 6x + 3
Пример 3
- Определите примитивные функции с учетом производных и точки на графике:
- dy / dx = 2x – 2, который проходит через точку (3, 2)
Важно помнить, что производные относятся к наклону линии, касательной к кривой в данной точке. Где некорректно предполагать, что график производной касается указанной точки, поскольку она принадлежит графику примитивной функции.
Таким образом, мы выражаем дифференциальное уравнение следующим образом:
dy = (2х – 2) дх ; тогда при применении критериев предотвращения вывода мы имеем:
∫dy = ∫ (2x – 2) dx
у = х2 – 2x + C
Применение начального условия:
2 = (3)2 – 2 (3) + С
С = -1
Получается: f (х) = х2 – 2х – 1
- dy / dx = 3x2 – 1, который проходит через точку (0, 2)
Выразим дифференциальное уравнение следующим образом:
dy = (3x2 – 1) дх ; тогда при применении критериев предотвращения вывода мы имеем:
∫dy = ∫ (3x2 – 1) дх
у = х3 – х + С
Применение начального условия:
2 = (0)2 – 2 (0) + С
С = 2
Получается: f (х) = х3 – х + 2
Предлагаемые упражнения
Упражнение 1
- Найдите примитив f (x), удовлетворяющий начальным условиям:
- f ” (х) = х; f ‘(3) = 1; f (2) = 5
- е ” (х) = х + 1; f ‘(2) = 2; f (0) = 1
- f ” (x) = 1; f ‘(2) = 3; f (1) = 10
- е ” (х) = -х; f ‘(5) = 1; f (1) = -8
Упражнение 2.
- Воздушный шар, поднимающийся со скоростью 16 футов / с, сбрасывает мешок с песком с высоты 64 футов над уровнем земли.
- Определите время полета
- Что будет вектор VF когда я упаду на пол?
Упражнение 3.
- На рисунке показан график ускорения-времени автомобиля, движущегося в положительном направлении оси x. Автомобиль двигался с постоянной скоростью 54 км / ч, когда водитель нажал на тормоза и остановился за 10 секунд. Определите:
- Начальный разгон автомобиля
- Скорость автомобиля при t = 5с
- Смещение автомобиля при торможении
Упражнение 4.
- Определите примитивные функции с учетом производных и точки на графике:
- dy / dx = x, проходящий через точку (-1, 4)
- dy / dx = -x2 +1, который проходит через точку (0, 0)
- dy / dx = -x + 1, который проходит через точку (-2, 2)
Ссылки
- Интегральное исчисление. Неопределенный интеграл и методы интегрирования. Уилсон, Веласкес Бастидас. Университет Магдалены 2014
- Стюарт, Дж. (2001). Расчет переменной. Ранние трансцендентальные. Мексика: Thomson Learning.
- Хименес, Р. (2011). Математика VI. Интегральное исчисление. Мексика: Pearson Education.
- Физика И. Мак Гроу Хилл
From Wikipedia, the free encyclopedia
In calculus, the constant of integration, often denoted by 

More specifically, if a function 
Origin[edit]
The derivative of any constant function is zero. Once one has found one antiderivative 
Let 

To prove this, notice that 



Choose a real number 

thereby showing that
Two facts are crucial in this proof. First, the real line is connected. If the real line were not connected, we would not always be able to integrate from our fixed a to any given x. For example, if we were to ask for functions defined on the union of intervals [0,1] and [2,3], and if a were 0, then it would not be possible to integrate from 0 to 3, because the function is not defined between 1 and 2. Here, there will be two constants, one for each connected component of the domain. In general, by replacing constants with locally constant functions, we can extend this theorem to disconnected domains. For example, there are two constants of integration for 


Second, 

For example, suppose one wants to find antiderivatives of 


It turns out that adding and subtracting constants is the only flexibility we have in finding different antiderivatives of the same function. That is, all antiderivatives are the same up to a constant. To express this fact for
Replacing
![{displaystyle {begin{aligned}{frac {d}{dx}}[sin(x)+C]&={frac {d}{dx}}sin(x)+{frac {d}{dx}}C\&=cos(x)+0\&=cos(x)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/57a1f94e2f3c827cbd77d0648f1d7532f57f3a35)
Necessity[edit]
At first glance, it may seem that the constant is unnecessary, since it can be set to zero. Furthermore, when evaluating definite integrals using the fundamental theorem of calculus, the constant will always cancel with itself.
However, trying to set the constant to zero does not always make sense. For example,

So setting
Another problem with setting 
This restriction can be rephrased in the language of differential equations. Finding an indefinite integral of a function 
There is another justification, coming from abstract algebra. The space of all (suitable) real-valued functions on the real numbers is a vector space, and the differential operator 
References[edit]
- ^ Stewart, James (2008). Calculus: Early Transcendentals (6th ed.). Brooks/Cole. ISBN 0-495-01166-5.
- ^ Larson, Ron; Edwards, Bruce H. (2009). Calculus (9th ed.). Brooks/Cole. ISBN 0-547-16702-4.
- ^ “Definition of constant of integration | Dictionary.com”. www.dictionary.com. Retrieved 2020-08-14.
- ^ Weisstein, Eric W. “Constant of Integration”. mathworld.wolfram.com. Retrieved 2020-08-14.
- ^ “Reader Survey: log|x| + C“, Tom Leinster, The n-category Café, March 19, 2012
- ^
