Определение координаты движущегося тела
Как определить координаты движущегося тела? Для этого необходимо знать такие понятия, как механическое движение, пройденный путь, скорость, перемещение.
Механическое движение
При механическом движении происходит изменение положения тела в пространстве относительно других тел за промежуток времени. Оно бывает равномерным и неравномерным.
Равномерное движение
При равномерном движении тело за равные промежутки времени проходит одинаковые расстояния (т.е. движется с постоянной скоростью).
Путь, пройденный при равномерном движении равен: Sx=Vxt=x-xо
Следовательно, при равномерном движении координата тела изменяется по следующей зависимости:

Где:
- Xо – начальная координата тела;
- X – координата в момент времени t;
- Vx – проекция скорости на ось X.
Неравномерное движение
Неравномерное движение – движение, при котором тело за равные промежутки времени проходит неодинаковые расстояния (движется с непостоянной скоростью), то есть движется с ускорением.
Если тело движется неравномерно, то скорость тела в разные моменты отличается не только по величине, но и (или) по направлению. Средняя скорость тела при неравномерном движении определяется по формуле: V (ср)= S (весь)/t (весь)
Ускорение – величина, показывающая, как изменяется скорость за 1 секунду.
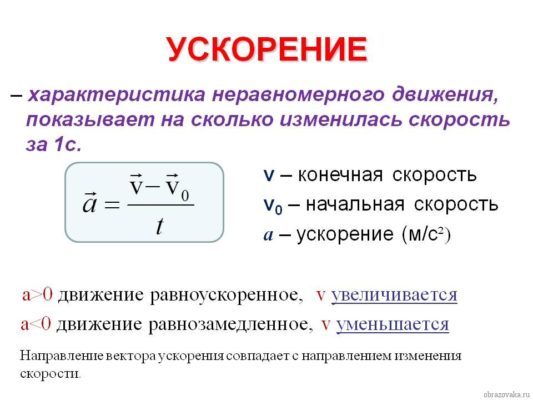
Следовательно, скорость в любой момент времени можно найти следующим образом:
V=Vо+at
Если скорость с течением времени увеличивается, то a больше 0, если скорость с течением времени уменьшается, то a меньше 0.
Как найти путь при равноускоренном движении?
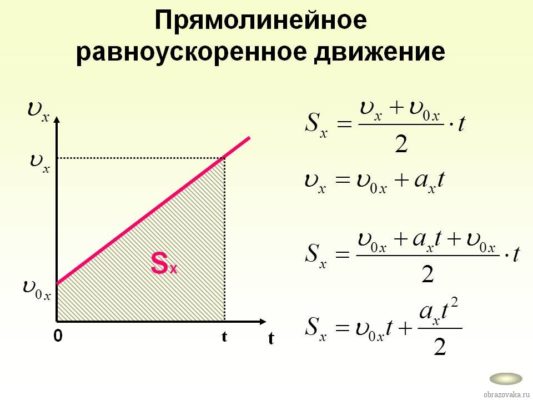
Пройденный путь численно равен площади под графиком. То есть Sx=(Vox+Vx)t/2
Скорость в любой момент времени равна Vx=Vox+axt, следовательно Sx=Voxt+axt2/2
Так как перемещение тела равно разности конечной и начальной координат (Sx=X-Xo), то координата в любой момент времени вычисляется по формуле X=Xo+Sx, или
X=Xo+Voxt+axt2/2
Движение тела по вертикали
Если тело движется по вертикали, а не по горизонтали, то такое движение всегда является равноускоренным. Когда тело падает вниз, то падает оно всегда с одинаковым ускорением – ускорением свободного падения. Оно всегда одинаковое: g=9,8 м/кв.с.
При движении по вертикали формула скорости приобретает вид: Vy=Voy+gt,
где Vy и Voy – проекции начальной и конечной скоростей на ось OY.
Координату же можно рассчитать по формуле: Y=Yo+Voyt+gt2/2
Движение тела по окружности
При движении по окружности численное значение скорости может и не изменяться, но поскольку обязательно изменяется направление, то движение по окружности – это всегда равноускоренное движение.

Что мы узнали?
Тема «Определение координаты движущего тела», которую изучают в 9 классе, поможет ученикам систематизировать информацию о том, что движение может быть равномерным и неравномерным. Так же для того чтобы знать пройденный путь, нужно выбрать тело отсчета и использовать прибор для отсчета времени.
Оценка доклада
А какая ваша оценка?
На
прошлом уроке мы с вами говорили о пути и перемещении тела. Давайте вспомним,
что путь — это скалярная величина, равная длине траектории, которую
описывает тело за некоторый промежуток времени.
А
перемещением называется направленный отрезок прямой, соединяющий
начальное и конечное положения тела.
Так
как перемещение — это векторная величина, то есть имеет модуль и направление,
то складывать и вычитать перемещения необходимо по правилам сложения и
вычитания векторов. Однако при решении большинства задач, используется понятие
не вектора, а проекции вектора на ось координат.
—
А что такое проекция вектора и каковы её свойства?
На
это вопрос мы с вами и попытаемся сегодня ответить. Начнём с простого — с
понятия проекция точки на ось. Проекция точки — это основание
перпендикуляра, опущенного из данной точки на ось.
На
представленном рисунке точка А1 — это проекция точки А
на ось Ox,
а точка B1 —
проекция точки B
на
ось Oy.
Теперь
разберёмся с проекцией вектора на ось. Согласно определению, проекция
вектора на ось — это длина отрезка между проекциями начала и конца вектора на
эту ось, взятая со знаком «плюс» или «минус».
Знак
«плюс» берут, если угол между вектором и осью острый, а «минус» — если угол
тупой.
Обозначать
проекцию вектора будем той же буквой, что и вектор, но с индексом внизу
(например, ax
— это проекция вектора a
на ось Ox).
—
А если вектор перпендикулярен оси?
Тогда
проекция этого вектора равна нулю.
Проекцию
вектора можно выразить через его модуль и угол между вектором и осью. Итак,
пусть у нас есть вектор a
направленный под некоторым острым углом к координатной оси Ox. Укажем проекцию этого вектора на
ось.
У
нас с вами получился прямоугольный треугольник, гипотенуза которого равна длине
вектора a,
а катет AB1
— это проекция вектора a
на
ось Ox.
Тогда,
на основании определения косинуса острого угла, мы можем записать, что проекция
вектора на ось равна модулю вектора, умноженному на косинус угла между вектором
и осью:
Это
правило справедливо при любых значениях угла φ. Например,
для углов, больше 90о, косинус угла φ отрицательный. Тогда по
формуле получается, что проекция вектора на ось также отрицательна, как и
должно быть по определению проекции.
—
А можно ли найти модуль и направление вектора по его проекциям на координатные
оси?
Чтобы
ответить на этот вопрос рассмотрим вектор, лежащий в плоскости xOy.
Вектор, лежащий в заданной плоскости, определяется двумя проекциями на оси
координат.
Обратим
внимание на важное свойство проекций: проекция суммы векторов на ось равна
сумме их проекций на эту ось.
Но
вернёмся к нашему прошлому уроку. На нём мы с вами говорили о том, что
положение тела, которое совершило некоторое перемещение, можно найти
графически. Для этого достаточно отложить вектор перемещения от начального
положения этого тела. Однако в большинстве случаев необходимо уметь вычислять
положение тела, то есть уметь определять его координаты. Давайте на примере
решения задачи посмотрим, как можно определить координату движущегося тела,
зная координату его начального положения и вектор перемещения.
Итак,
два поезда идут по параллельным путям в противоположных направлениях и
встречаются в шестидесяти километрах к востоку от железнодорожного вокзала.
Продолжив движение через некоторое время t первый поезд удалился от места
встречи на 50 километров в восточном направлении, а второй — на 80 километров в
западном. Определите координаты каждого поезда относительно вокзала и
расстояние между ними через промежуток времени t.
Содержание:
- калькулятор координаты тела при равномерном прямолинейном движении
- формула координаты тела при равномерном прямолинейном движении
Прямолинейное равномерное движение является наиболее простым и понятным типом механического движения. Подробнее узнать про этот вид движения можно здесь.
Для нахождения координаты тела при равномерном прямолинейном движении используется довольно простая формула:
Формула координаты тела при равномерном прямолинейном движении
x=x_0+ V cdot t
x0 – начальная координата тела
V – скорость тела
t – время движения
x – координата тела в текущий момент времени (в момент времени t)
Таким образом, для того, чтобы найти координату тела при равномерном прямолинейном движении необходимо знать только начальную координату тела, его скорость и время в пути. Вы можете подставить эти значения в наш онлайн калькулятор и получить результат.
Используя вектор перемещения, мы можем показать положение движущегося тела в определенный момент времени графически, но на практике нам необходим не рисунок, а определенные координаты. Их мы можем вычислить, чем и займемся на данном уроке.
Использование физических величин и понятий для вычислений
Определяя координаты движущегося тела, мы будем использовать модель материальной точки. Также нам потребуется система отсчета: нужно будет определиться с количеством координатных осей и их расположением относительно движущегося тела.
С какими величинами производят вычисления — с векторными или скалярными?
Обратите внимание, что мы не можем производить арифметические вычисления с векторами. Поэтому мы будем использовать соответствующие им скалярные величины — их модули и их проекции на координатные оси.
Проекция вектора перемещения
Проекция любого вектора строится по двум его точкам: начальной и конечной. Поэтому сначала мы рассмотрим, что же такое проекция точки на координатную ось.
Проекция точки — это основание перпендикуляра, опущенного из данной точки на ось.
Взгляните на рисунок 1. Точка $A_x$ является проекцией точки $A$ на ось OX, а точка $A_y$ — проекцией точки $A$ на ось OY.

Теперь перейдем к проекции вектора (рисунок 2).
Проекция вектора на ось — это длина отрезка, образованного проекциями начала и конца вектора на эту ось.

Соответственно, чтобы получить проекцию вектора перемещения на ось OX, мы сначала построили проекции точек $A$ и $B$ ($A_x$ и $B_x$). Отрезок на координатной оси, образованный этими точками (а точнее — длина этого отрезка) и будет являться проекцией вектора перемещения $vec s$ на ось OX — $s_x$.
Вектор перемещения и определение координаты тела
Рассмотрим разные варианты. Начнем с самого простого. Пусть наше тело двигалось из точки $1$ в точку $2$ прямолинейно. Изобразим вектор его перемещения $vec s$ (рисунок 3).

Движение происходило вдоль прямой. Значит, нам потребуется всего одна координатная ось. Ее направление будет совпадать с направлением движения тела. Далее нам нужно определить проекцию вектора перемещения на оси OX. Для этого мы сначала определяем координаты точек $1$ и $2$ (рисунок 4). Проекции этих точек на ось и будут являться их координатами.
Как мы это делаем? Опускаем из точки $1$ перпендикуляр на координатную ось и получаем координату этой точки — $x_1$. То же самое проделываем с точкой $2$ и получаем ее координату — $x_2$. Отмечаем на чертеже проекцию вектора перемещения $s_x$.

Чему равна эта проекция вектора перемещения?
Проекция перемещения — это разность конечной и начальной координат:
$s_x = x_2 space − space x_1$.
Обратите внимание, что в данном случае проекция вектора перемещения $s_x$ равна модулю перемещения $|vec s|$.
Если мы знаем начальную координату и перемещение, то сможем найти конечную координату тела по формуле:
$x_2 = x_1 space + space s_x$.
Направление вектора перемещения не совпадает с направлением координатной оси
Рассмотрим случай, если вектор перемещения направлен противоположно координатной оси (рисунок 5).

Опустив перпендикуляры на ось OX, получим координаты точек $1$ и $2$ ($x_1$ и $x_2$). По определению проекция перемещения $s_x$ будет равна:
$s_x = x_2 space − space x_1$.
Что изменилось? $x_1 > x_2$, поэтому рассчитывая проекцию перемещения, мы получим отрицательное число.
При каком условии проекция вектора на ось будет положительной, а при каком — отрицательной?
Если проекция вектора перемещения представляет собой отрицательное число, то тело движется в противоположную сторону от направления координатной оси.
При этом конечная координата тела будет определяться точно так же, как и в предыдущем случае:
$x_2 = x_1 space + space s_x$.
Вектор перемещения находится под углом к оси координат
Если вектор перемещения расположен под некоторым углом к оси OX, то нам потребуется вторая ось OY. Теперь мы должны определить две проекции вектора перемещения: $s_x$ и $s_y$ (рисунок 6).

Определяем эти проекции:
$s_x = x_2 space − space x_1$,
$s_y = y_2 space − space y_1$.
Обратите внимание, что эти проекции получаются меньше самого вектора перемещения, ведь они не совпадают с ним. Поэтому мы будем их использовать, чтобы найти модуль перемещения $|vec s|$ по теореме Пифагора (рисунок 7):
$|vec s| = sqrt{{s_x}^2 space + space {s_y}^2}$.

В случае вектора, расположенного под углом к оси, действует правило, проиллюстрированное на рисунке 8.
Проекция вектора является положительной, если угол между вектором и осью острый, и отрицательной, если угол тупой.

А если вектор перпендикулярен оси? Тогда проекция этого вектора равна нулю (рисунок 9).

Пример решения задачи
Два катера идут по реке в противоположных направлениях и встречаются в $100 space км$ к востоку от пристани П (рисунок 10). Продолжая движение, за некоторый промежуток времени $t$ первый катер переместился от места встречи на $60 space км$ к востоку, а второй — на $50 space км$ к западу. Определите координаты каждого катера относительно пристани и расстояние между катерами через промежуток времени $t$ после их встречи.

Для того, чтобы записать условия задачи и решить ее, нам нужно выбрать координатную ось и спроецировать на нее векторы перемещений двух катеров. Проведем координатную ось OX параллельно движению катеров. Точку O (начало координат: $x = 0$) совместим с пристанью П.
Теперь спроецируем векторы перемещений на ось OX. Мы получаем два отрезка: $s_{1x}$ и $s_{2x}$ (рисунок 11).

Далее мы смотрим, какой знак будут иметь эти проекции:
- вектор $vec s_1$ сонаправлен оси OX, поэтому $s_{1x} > 0$;
- вектор $vec s_2$ направлен противоположно оси OX, поэтому $s_{2x} < 0$.
Вот теперь мы можем записать условия задачи и перейти к ее решению.
Дано:
$x_0 = 100 space км$
$s_{1x} = 60 space км$
$s_{2x} = −50 space км$
$x_1 — ?$
$x_2 — ?$
$l — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Из рисунка 11 видно, что мы можем определить конечные координаты катеров по формулам:
$x_1 = x_0 space + space s_{1x}$,
$x_2 = x_0 space + space s_{2x}$.
Рассчитаем эти координаты:
$x_1 = 100 space км space + space 60 space км = 160 space км$,
$x_2 = 100 space км space − space 50 space км = 50 space км$.
Расстояние между двумя катерами будет равно модулю разности их координат:
$l = |x_1 space − space x_2|$,
$l = |160 space км space − space 50 space км| = 110 space км$.
Ответ: $x_1 = 160 space км$, $x_2 = 50 space км$, $l = 110 space км$.
Упражнения
Упражнение №1
Мотоциклист, переехав через мост, движется по прямолинейному участку дороги. У светофора, находящегося на расстоянии $10 space км$ от моста, мотоциклист встречает велосипедиста. За $0.1 space ч$ с момента встречи мотоциклист перемещается на $6 space км$, а велосипедист — на $2 space км$ от светофора (при этом оба они продолжают двигаться прямолинейно в противоположных направлениях).
Определите координаты мотоциклиста и велосипедиста и расстояние между ними спустя $0.1 space ч$ после их встречи.
Начертим ось OX, направив ее в сторону движения мотоциклиста и приняв за тело отсчета мост (рисунок 12). Обозначим на этой оси координату светофора ($x_с$), координаты велосипедиста ($x_в$) и мотоциклиста ($x_м$), которые они имели через $0.1 space ч$ после встречи. Над осью обозначим векторы перемещений велосипедиста ($vec s_в$) и мотоциклиста ($vec s_м$), а на оси — проекции этих векторов ($s_{вx}$ и $s_{мx}$).

Дано:
$x_с = 10 space км$
$x_{мx} = 6 space км$
$x_{вx} = −2 space км$
$x_м — ?$
$x_в — ?$
$l — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Сначала вычислим конечную координату мотоциклиста:
$x_м = x_с space + space s_{мx}$,
$x_м = 10 space км space + space 6 space км = 16 space км$.
Теперь рассчитаем конечную координату велосипедиста:
$x_в = x_с space + space s_{вx}$.
$x_в = 10 space км space − space 2 space км = 8 space км$.
Расстояние между мотоциклистом и велосипедистом будет равно модулю разности их координат:
$l = |x_м space − space x_в$,
$l = |16 space км space − space 8 space км| = 8 space км$.
Ответ: $x_м = 16 space км$, $x_в = 8 space км$, $l = 8 space км$.
Упражнение №2
Мальчик держит в руках мяч на высоте $1 space м$ от поверхности земли. Затем он подбрасывает мяч вертикально вверх. За некоторый промежуток времени $t$ мяч успевает подняться на $2.4 space м$ от своего первоначального положения, достигнув при этом точки наибольшего подъема, и опуститься от этой точки на $1.25 space м$ (рисунок 13).
Пользуясь этим рисунком, определите:
а) координату $x_0$ начального положения мяча;
б) проекцию $s_{tx}$ вектора перемещения $vec s_t$, совершенного мячом за время $t$;
в) координату $x_t$, которую имел мяч через промежуток времени $t$ после броска.

Дано:
$x_0 = 1 space м$
$s_{1x} = 2.4 space м$
$s_{2x} = −1.25 space м$
$x_0 — ?$
$s_{tx} — ?$
$x_t — ?$
Посмотреть решение и ответ
Скрыть
Решение:
На рисунке 13 мы видим, что начало оси OX совпадает с поверхностью земли. Также в условии задачи сказано, что мальчик держит мяч на высоте, равной $1 space м$. Это и есть координата начального положения мяча: $x_0 = 1 space м$.
Что такое вектор перемещения $s_t$? По определению это вектор, соединяющий начальное положение тела с его конечным положением в пространстве. Начальное положение мяча — это координата $x_0$, а конечное положение — координата $x_t$. При этом мяч сначала летел вверх (вектор перемещения $vec s_1$) , а потом вниз (вектор перемещения $vec s_2$). Если мы сложим эти векторы, то получим итоговый вектор перемещения $vec s_t$, показанный на рисунке 13.
Далее мы используем формулу с рисунка, не забывая при этом о знаках векторов, чтобы рассчитать проекцию вектора перемещения $s_{tx}$:
$s_{tx} = s_{1x} space + space s_{2x}$,
$s_{tx} = 2.4 space м space − space 1.25 space м = 1.15 space м$.
Теперь найдем координату мяча, в которой он оказался по прошествии времени $t$. Из рисунка 13 видно, что:
$x_t = x_0 space + space s_{tx}$,
$x_t = 1 space м space + 1.15 space м = 2.25 space м$.
Ответ: $x_0 = 1 space м$, $s_{tx} = 1.15 space м$, $x_t = 2.25 space м$.
Определение
координат движущегося тела (ОГЭ, теория)
Для того,
чтобы определить положение тела, которое совершило некоторое перемещение, можно
графически приставить вектор перемещения к начальному положению тела. Но на
практике часто встречаются задачи в которых необходимо вычислить положение
тела, то есть записать его координаты в некоторой системе координат.
В этом
случае вычисления будут производиться не с самим векторами, а с их проекциями
на координатные оси и с их модулями. Эти величины которые будут представлять
собой некоторые числа, положительные или отрицательные, но не будут иметь
направления.

Рассмотрим
следующую задачу
Необходимо
определить координату движущегося тела, по известной начальной координате и
известному вектору перемещения.
·
Два катера двигаются по реке в противоположных направлениях. В 100
км от пристани П они встречаются. Продолжая движение, за некоторое время t
первый катер переместился от места встречи на 60 км к востоку,
второй переместился ха это же время на 50 км к западу.
Определить
координаты катеров по отношению к пристани и расстояние между ними.
Построим
координатную ось Ох, параллельно прямой вдоль которой двигаются катера. Начало
оси х=0 совместим с пристанью. За положительное направление примем
направление на восток.
Спроецируем
начала и концы векторов перемещений s1 и s2 на ось Ох, получим отрезки
sx1 и sx2. Эти отрезки будут являться проекциями данных векторов.
Проекция
вектора на ось, будет положительной, если вектор сонаправлен с осью, и
отрицательной, если вектор направлен в противоположную оси сторону.
В
нашем случае sx1 положительная проекция, а sx2 отрицательная проекция.
Проекция
вектора, будет равна разности координат конца и начала вектора.
В
нашем случае имеем:
·
s1x=x1-x0
·
sx2=x2-x0
Теперь
выразим из этих уравнений координаты x1 и x2.
Расстояние
между двумя катерами будет равно модулю разности их координат,
·
l=|x1-x2|.
Мы
получили формулы для вычисления координат точек и расстояния между ними.
Из
условия задачи, катера встретились на расстоянии 100 км от пристани. х0 – точка
встречи. Следовательно расстояние от х0 до пристани(начала координат) 100 км.
х0=100 км.
Так
как мы выбрали ось Ох параллельно векторам перемещений катеров. Длины отрезков
sx1 и sx2 будут равны длинам векторов s1 и s2. Модуль каждой проекции
будет равен модулю соответствующего ей вектора.
По
условию у нас даны числа 50 км и 60 км, это и есть модули векторов
соответствующий перемещений.
·
sx1=60 км.
·
sx2=-50 км.
В
итоге получаем,
·
x1=100+60 = 160 км.
·
x2=100-50=50 км.
·
l=|160-50|=110 км.
Ответ:
х1=160 км, х2=50 км, l=110 км.
