Определение координаты движущегося тела
Как определить координаты движущегося тела? Для этого необходимо знать такие понятия, как механическое движение, пройденный путь, скорость, перемещение.
Механическое движение
При механическом движении происходит изменение положения тела в пространстве относительно других тел за промежуток времени. Оно бывает равномерным и неравномерным.
Равномерное движение
При равномерном движении тело за равные промежутки времени проходит одинаковые расстояния (т.е. движется с постоянной скоростью).
Путь, пройденный при равномерном движении равен: Sx=Vxt=x-xо
Следовательно, при равномерном движении координата тела изменяется по следующей зависимости:

Где:
- Xо – начальная координата тела;
- X – координата в момент времени t;
- Vx – проекция скорости на ось X.
Неравномерное движение
Неравномерное движение – движение, при котором тело за равные промежутки времени проходит неодинаковые расстояния (движется с непостоянной скоростью), то есть движется с ускорением.
Если тело движется неравномерно, то скорость тела в разные моменты отличается не только по величине, но и (или) по направлению. Средняя скорость тела при неравномерном движении определяется по формуле: V (ср)= S (весь)/t (весь)
Ускорение – величина, показывающая, как изменяется скорость за 1 секунду.
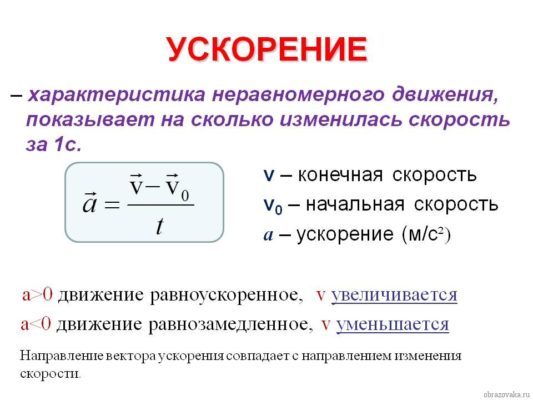
Следовательно, скорость в любой момент времени можно найти следующим образом:
V=Vо+at
Если скорость с течением времени увеличивается, то a больше 0, если скорость с течением времени уменьшается, то a меньше 0.
Как найти путь при равноускоренном движении?
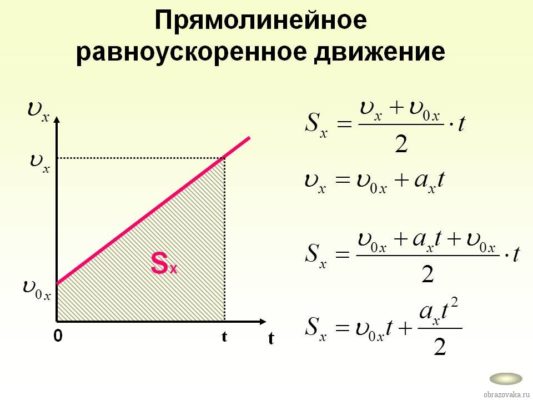
Пройденный путь численно равен площади под графиком. То есть Sx=(Vox+Vx)t/2
Скорость в любой момент времени равна Vx=Vox+axt, следовательно Sx=Voxt+axt2/2
Так как перемещение тела равно разности конечной и начальной координат (Sx=X-Xo), то координата в любой момент времени вычисляется по формуле X=Xo+Sx, или
X=Xo+Voxt+axt2/2
Движение тела по вертикали
Если тело движется по вертикали, а не по горизонтали, то такое движение всегда является равноускоренным. Когда тело падает вниз, то падает оно всегда с одинаковым ускорением – ускорением свободного падения. Оно всегда одинаковое: g=9,8 м/кв.с.
При движении по вертикали формула скорости приобретает вид: Vy=Voy+gt,
где Vy и Voy – проекции начальной и конечной скоростей на ось OY.
Координату же можно рассчитать по формуле: Y=Yo+Voyt+gt2/2
Движение тела по окружности
При движении по окружности численное значение скорости может и не изменяться, но поскольку обязательно изменяется направление, то движение по окружности – это всегда равноускоренное движение.

Что мы узнали?
Тема «Определение координаты движущего тела», которую изучают в 9 классе, поможет ученикам систематизировать информацию о том, что движение может быть равномерным и неравномерным. Так же для того чтобы знать пройденный путь, нужно выбрать тело отсчета и использовать прибор для отсчета времени.
Оценка доклада
А какая ваша оценка?
Содержание:
- калькулятор координаты тела при равномерном прямолинейном движении
- формула координаты тела при равномерном прямолинейном движении
Прямолинейное равномерное движение является наиболее простым и понятным типом механического движения. Подробнее узнать про этот вид движения можно здесь.
Для нахождения координаты тела при равномерном прямолинейном движении используется довольно простая формула:
Формула координаты тела при равномерном прямолинейном движении
x=x_0+ V cdot t
x0 – начальная координата тела
V – скорость тела
t – время движения
x – координата тела в текущий момент времени (в момент времени t)
Таким образом, для того, чтобы найти координату тела при равномерном прямолинейном движении необходимо знать только начальную координату тела, его скорость и время в пути. Вы можете подставить эти значения в наш онлайн калькулятор и получить результат.
На
прошлом уроке мы с вами говорили о пути и перемещении тела. Давайте вспомним,
что путь — это скалярная величина, равная длине траектории, которую
описывает тело за некоторый промежуток времени.
А
перемещением называется направленный отрезок прямой, соединяющий
начальное и конечное положения тела.
Так
как перемещение — это векторная величина, то есть имеет модуль и направление,
то складывать и вычитать перемещения необходимо по правилам сложения и
вычитания векторов. Однако при решении большинства задач, используется понятие
не вектора, а проекции вектора на ось координат.
—
А что такое проекция вектора и каковы её свойства?
На
это вопрос мы с вами и попытаемся сегодня ответить. Начнём с простого — с
понятия проекция точки на ось. Проекция точки — это основание
перпендикуляра, опущенного из данной точки на ось.
На
представленном рисунке точка А1 — это проекция точки А
на ось Ox,
а точка B1 —
проекция точки B
на
ось Oy.
Теперь
разберёмся с проекцией вектора на ось. Согласно определению, проекция
вектора на ось — это длина отрезка между проекциями начала и конца вектора на
эту ось, взятая со знаком «плюс» или «минус».
Знак
«плюс» берут, если угол между вектором и осью острый, а «минус» — если угол
тупой.
Обозначать
проекцию вектора будем той же буквой, что и вектор, но с индексом внизу
(например, ax
— это проекция вектора a
на ось Ox).
—
А если вектор перпендикулярен оси?
Тогда
проекция этого вектора равна нулю.
Проекцию
вектора можно выразить через его модуль и угол между вектором и осью. Итак,
пусть у нас есть вектор a
направленный под некоторым острым углом к координатной оси Ox. Укажем проекцию этого вектора на
ось.
У
нас с вами получился прямоугольный треугольник, гипотенуза которого равна длине
вектора a,
а катет AB1
— это проекция вектора a
на
ось Ox.
Тогда,
на основании определения косинуса острого угла, мы можем записать, что проекция
вектора на ось равна модулю вектора, умноженному на косинус угла между вектором
и осью:
Это
правило справедливо при любых значениях угла φ. Например,
для углов, больше 90о, косинус угла φ отрицательный. Тогда по
формуле получается, что проекция вектора на ось также отрицательна, как и
должно быть по определению проекции.
—
А можно ли найти модуль и направление вектора по его проекциям на координатные
оси?
Чтобы
ответить на этот вопрос рассмотрим вектор, лежащий в плоскости xOy.
Вектор, лежащий в заданной плоскости, определяется двумя проекциями на оси
координат.
Обратим
внимание на важное свойство проекций: проекция суммы векторов на ось равна
сумме их проекций на эту ось.
Но
вернёмся к нашему прошлому уроку. На нём мы с вами говорили о том, что
положение тела, которое совершило некоторое перемещение, можно найти
графически. Для этого достаточно отложить вектор перемещения от начального
положения этого тела. Однако в большинстве случаев необходимо уметь вычислять
положение тела, то есть уметь определять его координаты. Давайте на примере
решения задачи посмотрим, как можно определить координату движущегося тела,
зная координату его начального положения и вектор перемещения.
Итак,
два поезда идут по параллельным путям в противоположных направлениях и
встречаются в шестидесяти километрах к востоку от железнодорожного вокзала.
Продолжив движение через некоторое время t первый поезд удалился от места
встречи на 50 километров в восточном направлении, а второй — на 80 километров в
западном. Определите координаты каждого поезда относительно вокзала и
расстояние между ними через промежуток времени t.
Используя вектор перемещения, мы можем показать положение движущегося тела в определенный момент времени графически, но на практике нам необходим не рисунок, а определенные координаты. Их мы можем вычислить, чем и займемся на данном уроке.
Использование физических величин и понятий для вычислений
Определяя координаты движущегося тела, мы будем использовать модель материальной точки. Также нам потребуется система отсчета: нужно будет определиться с количеством координатных осей и их расположением относительно движущегося тела.
С какими величинами производят вычисления — с векторными или скалярными?
Обратите внимание, что мы не можем производить арифметические вычисления с векторами. Поэтому мы будем использовать соответствующие им скалярные величины — их модули и их проекции на координатные оси.
Проекция вектора перемещения
Проекция любого вектора строится по двум его точкам: начальной и конечной. Поэтому сначала мы рассмотрим, что же такое проекция точки на координатную ось.
Проекция точки — это основание перпендикуляра, опущенного из данной точки на ось.
Взгляните на рисунок 1. Точка $A_x$ является проекцией точки $A$ на ось OX, а точка $A_y$ — проекцией точки $A$ на ось OY.

Теперь перейдем к проекции вектора (рисунок 2).
Проекция вектора на ось — это длина отрезка, образованного проекциями начала и конца вектора на эту ось.

Соответственно, чтобы получить проекцию вектора перемещения на ось OX, мы сначала построили проекции точек $A$ и $B$ ($A_x$ и $B_x$). Отрезок на координатной оси, образованный этими точками (а точнее — длина этого отрезка) и будет являться проекцией вектора перемещения $vec s$ на ось OX — $s_x$.
Вектор перемещения и определение координаты тела
Рассмотрим разные варианты. Начнем с самого простого. Пусть наше тело двигалось из точки $1$ в точку $2$ прямолинейно. Изобразим вектор его перемещения $vec s$ (рисунок 3).

Движение происходило вдоль прямой. Значит, нам потребуется всего одна координатная ось. Ее направление будет совпадать с направлением движения тела. Далее нам нужно определить проекцию вектора перемещения на оси OX. Для этого мы сначала определяем координаты точек $1$ и $2$ (рисунок 4). Проекции этих точек на ось и будут являться их координатами.
Как мы это делаем? Опускаем из точки $1$ перпендикуляр на координатную ось и получаем координату этой точки — $x_1$. То же самое проделываем с точкой $2$ и получаем ее координату — $x_2$. Отмечаем на чертеже проекцию вектора перемещения $s_x$.

Чему равна эта проекция вектора перемещения?
Проекция перемещения — это разность конечной и начальной координат:
$s_x = x_2 space − space x_1$.
Обратите внимание, что в данном случае проекция вектора перемещения $s_x$ равна модулю перемещения $|vec s|$.
Если мы знаем начальную координату и перемещение, то сможем найти конечную координату тела по формуле:
$x_2 = x_1 space + space s_x$.
Направление вектора перемещения не совпадает с направлением координатной оси
Рассмотрим случай, если вектор перемещения направлен противоположно координатной оси (рисунок 5).

Опустив перпендикуляры на ось OX, получим координаты точек $1$ и $2$ ($x_1$ и $x_2$). По определению проекция перемещения $s_x$ будет равна:
$s_x = x_2 space − space x_1$.
Что изменилось? $x_1 > x_2$, поэтому рассчитывая проекцию перемещения, мы получим отрицательное число.
При каком условии проекция вектора на ось будет положительной, а при каком — отрицательной?
Если проекция вектора перемещения представляет собой отрицательное число, то тело движется в противоположную сторону от направления координатной оси.
При этом конечная координата тела будет определяться точно так же, как и в предыдущем случае:
$x_2 = x_1 space + space s_x$.
Вектор перемещения находится под углом к оси координат
Если вектор перемещения расположен под некоторым углом к оси OX, то нам потребуется вторая ось OY. Теперь мы должны определить две проекции вектора перемещения: $s_x$ и $s_y$ (рисунок 6).

Определяем эти проекции:
$s_x = x_2 space − space x_1$,
$s_y = y_2 space − space y_1$.
Обратите внимание, что эти проекции получаются меньше самого вектора перемещения, ведь они не совпадают с ним. Поэтому мы будем их использовать, чтобы найти модуль перемещения $|vec s|$ по теореме Пифагора (рисунок 7):
$|vec s| = sqrt{{s_x}^2 space + space {s_y}^2}$.

В случае вектора, расположенного под углом к оси, действует правило, проиллюстрированное на рисунке 8.
Проекция вектора является положительной, если угол между вектором и осью острый, и отрицательной, если угол тупой.

А если вектор перпендикулярен оси? Тогда проекция этого вектора равна нулю (рисунок 9).

Пример решения задачи
Два катера идут по реке в противоположных направлениях и встречаются в $100 space км$ к востоку от пристани П (рисунок 10). Продолжая движение, за некоторый промежуток времени $t$ первый катер переместился от места встречи на $60 space км$ к востоку, а второй — на $50 space км$ к западу. Определите координаты каждого катера относительно пристани и расстояние между катерами через промежуток времени $t$ после их встречи.

Для того, чтобы записать условия задачи и решить ее, нам нужно выбрать координатную ось и спроецировать на нее векторы перемещений двух катеров. Проведем координатную ось OX параллельно движению катеров. Точку O (начало координат: $x = 0$) совместим с пристанью П.
Теперь спроецируем векторы перемещений на ось OX. Мы получаем два отрезка: $s_{1x}$ и $s_{2x}$ (рисунок 11).

Далее мы смотрим, какой знак будут иметь эти проекции:
- вектор $vec s_1$ сонаправлен оси OX, поэтому $s_{1x} > 0$;
- вектор $vec s_2$ направлен противоположно оси OX, поэтому $s_{2x} < 0$.
Вот теперь мы можем записать условия задачи и перейти к ее решению.
Дано:
$x_0 = 100 space км$
$s_{1x} = 60 space км$
$s_{2x} = −50 space км$
$x_1 — ?$
$x_2 — ?$
$l — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Из рисунка 11 видно, что мы можем определить конечные координаты катеров по формулам:
$x_1 = x_0 space + space s_{1x}$,
$x_2 = x_0 space + space s_{2x}$.
Рассчитаем эти координаты:
$x_1 = 100 space км space + space 60 space км = 160 space км$,
$x_2 = 100 space км space − space 50 space км = 50 space км$.
Расстояние между двумя катерами будет равно модулю разности их координат:
$l = |x_1 space − space x_2|$,
$l = |160 space км space − space 50 space км| = 110 space км$.
Ответ: $x_1 = 160 space км$, $x_2 = 50 space км$, $l = 110 space км$.
Упражнения
Упражнение №1
Мотоциклист, переехав через мост, движется по прямолинейному участку дороги. У светофора, находящегося на расстоянии $10 space км$ от моста, мотоциклист встречает велосипедиста. За $0.1 space ч$ с момента встречи мотоциклист перемещается на $6 space км$, а велосипедист — на $2 space км$ от светофора (при этом оба они продолжают двигаться прямолинейно в противоположных направлениях).
Определите координаты мотоциклиста и велосипедиста и расстояние между ними спустя $0.1 space ч$ после их встречи.
Начертим ось OX, направив ее в сторону движения мотоциклиста и приняв за тело отсчета мост (рисунок 12). Обозначим на этой оси координату светофора ($x_с$), координаты велосипедиста ($x_в$) и мотоциклиста ($x_м$), которые они имели через $0.1 space ч$ после встречи. Над осью обозначим векторы перемещений велосипедиста ($vec s_в$) и мотоциклиста ($vec s_м$), а на оси — проекции этих векторов ($s_{вx}$ и $s_{мx}$).

Дано:
$x_с = 10 space км$
$x_{мx} = 6 space км$
$x_{вx} = −2 space км$
$x_м — ?$
$x_в — ?$
$l — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Сначала вычислим конечную координату мотоциклиста:
$x_м = x_с space + space s_{мx}$,
$x_м = 10 space км space + space 6 space км = 16 space км$.
Теперь рассчитаем конечную координату велосипедиста:
$x_в = x_с space + space s_{вx}$.
$x_в = 10 space км space − space 2 space км = 8 space км$.
Расстояние между мотоциклистом и велосипедистом будет равно модулю разности их координат:
$l = |x_м space − space x_в$,
$l = |16 space км space − space 8 space км| = 8 space км$.
Ответ: $x_м = 16 space км$, $x_в = 8 space км$, $l = 8 space км$.
Упражнение №2
Мальчик держит в руках мяч на высоте $1 space м$ от поверхности земли. Затем он подбрасывает мяч вертикально вверх. За некоторый промежуток времени $t$ мяч успевает подняться на $2.4 space м$ от своего первоначального положения, достигнув при этом точки наибольшего подъема, и опуститься от этой точки на $1.25 space м$ (рисунок 13).
Пользуясь этим рисунком, определите:
а) координату $x_0$ начального положения мяча;
б) проекцию $s_{tx}$ вектора перемещения $vec s_t$, совершенного мячом за время $t$;
в) координату $x_t$, которую имел мяч через промежуток времени $t$ после броска.

Дано:
$x_0 = 1 space м$
$s_{1x} = 2.4 space м$
$s_{2x} = −1.25 space м$
$x_0 — ?$
$s_{tx} — ?$
$x_t — ?$
Посмотреть решение и ответ
Скрыть
Решение:
На рисунке 13 мы видим, что начало оси OX совпадает с поверхностью земли. Также в условии задачи сказано, что мальчик держит мяч на высоте, равной $1 space м$. Это и есть координата начального положения мяча: $x_0 = 1 space м$.
Что такое вектор перемещения $s_t$? По определению это вектор, соединяющий начальное положение тела с его конечным положением в пространстве. Начальное положение мяча — это координата $x_0$, а конечное положение — координата $x_t$. При этом мяч сначала летел вверх (вектор перемещения $vec s_1$) , а потом вниз (вектор перемещения $vec s_2$). Если мы сложим эти векторы, то получим итоговый вектор перемещения $vec s_t$, показанный на рисунке 13.
Далее мы используем формулу с рисунка, не забывая при этом о знаках векторов, чтобы рассчитать проекцию вектора перемещения $s_{tx}$:
$s_{tx} = s_{1x} space + space s_{2x}$,
$s_{tx} = 2.4 space м space − space 1.25 space м = 1.15 space м$.
Теперь найдем координату мяча, в которой он оказался по прошествии времени $t$. Из рисунка 13 видно, что:
$x_t = x_0 space + space s_{tx}$,
$x_t = 1 space м space + 1.15 space м = 2.25 space м$.
Ответ: $x_0 = 1 space м$, $s_{tx} = 1.15 space м$, $x_t = 2.25 space м$.
План урока:
Механическое движение. Система отсчёта. Закон относительности движения
Уравнения движения. Радиус-вектор. Проекция вектора
Траектория. Путь. Перемещение
Равномерное прямолинейное движение: скорость и уравнение движения
Механическое движение. Система отсчёта. Закон относительности движения
Механическим движением в физике называется изменение с течением времени положения тела (или его частей) в пространстве относительно других тел.
То есть, чтобы сказать, что тело или система совершает механическое движение, нам необходимо: 1) наблюдать его во времени; 2) сравнивать его положение с положением какого-то другого тела (относительно этого тела).
Например, пассажир в едущем автомобиле неподвижен относительно кресла, на котором он сидит, но он движется относительно людей, стоящих на автобусной остановке и самой остановки. А сама автобусная остановка неподвижна относительно стоящих людей, ждущих автобус (см. рисунок 1). Однако она движется относительно проезжающих мимо машин. В первом случае наблюдаемым объектом был человек в машине, а точкой отсчета кресло и люди на остановке. Во втором случае наблюдаемой была автобусная остановка, а точками отсчета – люди на остановке и проезжающие мимо машины.

Рисунок 1 – Иллюстрация к примеру
Из примеров можно сделать вывод, что важно, какой именно объект находится под наблюдением и относительно какого объекта – тела отсчета – рассматривается его движение. Отсюда можно сформулировать закон относительности движения: характер движения тела зависит от того, относительно какого объекта мы рассматриваем данное движение.
Тело (или точка) отсчета, связанная с ним система координат и часы, вместе образуют систему отсчета. То есть все сказанное выше можно переформулировать в одно предложение: для наблюдения механического движения важно в какой системе отсчета будет происходить наблюдение.

Рисунок 2 – Пример системы отсчета (наблюдаемы объект – летящий мяч, тело отсчета – камень, лежащий в начале координат, система координат и секундомер для отсчета времени)
Однако объекты могут быть очень сложными для наблюдения. Например, автомобиль едет по прямой несколько километров и необходимо описать его движение относительно камня на обочине. Казалось бы, все просто. Но как именно описать движение автомобиля, если корпус его движется по прямой, а колеса совершают вращательные движения.
Для удобства решения подобных задач принято упрощение: если размер и форма тела в данной задаче не играют важной роли для наблюдателя, можно считать это тело за материальную точку.
Материальная точка – это такое тело, размером и формой которого в условиях данной задачи можно пренебречь.
Приведем пример: когда автобус едет из города А в город Б, его можно рассматривать как материальную точку. Когда пассажир идет из одного конца этого автобуса в другой, считать автобус материальной точкой нельзя. В общем случае можно сказать, что тело можно считать материальной точкой, если его размеры значительно меньше расстояния, на которое оно перемещается.
Уравнения движения. Радиус-вектор. Проекция вектора
Для описания движения тела необходимо уметь рассчитывать его положение в каждый момент времени. Как это сделать?
Самый очевидный способ – координатный. Если вернуться к примеру на рисунке 2, можно увидеть, что летящий мяч в каждый момент времени имеет три координаты по осям OX, OY и OZ. Эти координаты являются функциями времени (т.е. они зависят от времени), а значит, их можно записать в виде системы:

Вид этих уравнений будет зависеть от многих вещей: от того, с какой силой бросили мяч в начале, от массы мяча, под каким углом его бросили и так далее. В любом случае, если эти уравнения заданы, можно найти координаты (то есть положение) тела в любой момент времени. Поиск этих уравнений – основная задача кинематики.
Эта система является кинематическими уравнениями движения тела или материальной точки, записанными в координатной форме. Повторим: если вид уравнений движения задан, можно узнать координату движущейся точки в любой момент времени.
В общем случае, координат три, но иногда можно обойтись двумя или даже одной координатой. Например, для описания движения бильярдного шара достаточно двух координат (так как шар не может двигаться вверх и вниз), а для описания движения шарика, катящегося по прямому горизонтальному желобку достаточно одной координаты (шарик не может двигаться вверх-вниз и вправо-влево).
Еще один способ описания движения – векторный.
*Перед дальнейшим прочтением данной статьи желательно вспомнить основную теорию по теме «Векторы» и «Метод координат»
Вектор, проведенный из начала координат к материальной точке, называется радиус-вектором (см. рисунок 3).

Рисунок 3 – Радиус-вектор (серой линией изображены траектория движения материальной точки, r1 и r2* радиус-векторы, проведенные к этой материальной точке в разные моменты времени)
Радиус-вектор проведенный к материальной точке в разные моменты времени будет разным. Значит, его тоже можно представить, как функцию времени:
r = r(t)
Такая функция и будет уравнением движения в векторной форме. Если ее вид задан, можно описать движение тела с той же полнотой, как и при координатной записи.
Еще раз обозначим отличия: при записи уравнения движения в координатной форме в каждый момент времени наблюдающий будет знать три координаты тела; при записи в векторной форме в каждый момент времени известен радиус-вектор (его модуль и направление). Обе записи равносильны.
*На письме векторы обычно обозначаются стрелкой сверху, над величиной. Однако в печатном тексте не всегда удобно нагромождать формулы дополнительными знаками, поэтому в печати векторные величины пишут просто жирным шрифтом. В данной статье далее жирным шрифтом будут написаны только векторные величины.
Покажем, что векторная и координатная записи равносильны. Для этого необходимо вспомнить, как построить проекцию вектора на ось (см. рисунок 4).

Рисунок 4 – Построение проекции вектора на ось
Чтобы построить проекцию вектора на ось, необходимо опустить перпендикуляра из начала и конца вектора на эту ось. Длина получившегося отрезка между проекциями начала и конца вектора, взятая со знаком «+», если вектор а сонаправлен с осью Х, или со знаком «-», если вектор а противонаправлен оси Х, – это и есть искомая проекция.
Если вектор выходит из начала координат, задача облегчается – необходимо опустить перпендикуляр только из конца вектора.
Напоминания из геометрии:
-
два вектора равны, если они параллельны или лежат на одной прямой, сонаправлены, а их модули равны;
-
проекции равных векторов равны.
Рассмотрим пример (см. рисунок 5)

Рисунок 5 – Задача на нахождение проекции векторов
Предлагаем читателю самому подумать, а затем сравнить свои рассуждения с приведенными ниже.
Итак, вектор а: его начала соответствует координате хн=1, а конец хк = 4. Значит ax = хк – хн = 4-1 = 3. Вектор b: его начало лежит в точке хн=2, а конец хк =0. Значит bx = хк – хн = 0-2 = -2.
В двумерном случае, проецировать нужно на две оси, но принцип остается тем же.
Иногда еще нужно находить составляющие компоненты вектора ах и ау. Рассмотрим пример, для простоты возьмем вектор, выходящий из начал координат (см. рисунок 6).
Сумма векторов ах и ау равна а. Модули векторов ах и ау численно равны координатам точек, куда попали перпендикуляры, опущенные из конца вектора а на оси ОХ и ОУ.
Еще следует отметить, что, если известен угол β между вектором а и осью ОХ, воспользовавшись основами тригонометрии, можно найти величины проекций:
ах = а*cos(β);
аy = а*sin(β).
Если бы вектор а совпадал с радиус-вектором какой-нибудь точки, то величины ах и ау совпадали бы с координатами тела по осям ОХ и ОY.
Способ с использованием тригонометрических функций удобен, когда координата конца вектора попадает в нецелое число и опустив перпендикуляр на ось его трудно найти точно. В физических задачах такое часто случается.

Рисунок 6 – Нахождение компонент вектора а
Рассмотрим пример (см. рисунок 7). Модуль вектора r равен 2. Сам вектор направлен под углом в 45 градусов к оси ОХ. Необходимо найти величины проекций (они же координаты) этого вектора на оси ОХ и ОУ.

Рисунок 7 – Задача на нахождение проекций вектора в двумерном пространстве
В общем случае радиус-вектор находится в трехмерном пространстве (см. рисунок 8). Построение проекции осуществляется по тому же принципу, что и в рассмотренных выше примерах. Когда строятся проекции на оси ОХ и ОУ, перпендикуляр сначала опускается на плоскость, в которой лежат оси ОХ и ОУ, а затем точка, в которую упал перпендикуляр к плоскости, проецируется на оси ОХ и ОУ.
Точки, в которые попал перпендикуляры к осям – rx, ry, rz – это и есть координаты x, y, z тела в текущий момент времени.
Следует оговориться, что большинство задач 10-го класса будут ограничиваться двумерным пространством.

Рисунок 8 – Построение проекций радиус-вектора
Траектория. Путь. Перемещение
Траектория – это линия, вдоль которой движется тело.
Траектория движения может быть прямолинейной, если тело движется по прямой линии, и криволинейной, если тело движется по кривой.
Путь (S), пройденный телом, равен длине траектории.
Перемещение (r)* – это вектор, проведенный из начала пути в конец.
В случае прямолинейного движения путь и модуль перемещения тела совпадают (см. рисунок 9а). В случае криволинейного – путь и перемещение различаются (см. рисунок 9б), так как длина линии движения тела больше длины вектора, соединяющего начало и конец траектории.

Рисунок 9 – Путь (S) и перемещение (r) при прямолинейном (а) и криволинейном (б) движении
*Иногда перемещение так же, как и путь, называют буквой S – (на письме с вектором над ней, при печати – жирным шрифтом, так как это векторная величина). В данной статье, чтобы не путаться, перемещение называется только буквой r. В целом, обозначения равноправны, поэтому при решении задач можно использовать то, которое удобнее. Однако не стоит забывать отмечать, что именно обозначено под той или иной буквой.
Равномерное прямолинейное движение: скорость и уравнение движения
Путь и перемещение при равномерном прямолинейном движении
Прямолинейное равномерное движение уже рассматривалось в курсе физики ранее, однако приведем основные определения.
Прямолинейное движение – это движение по прямой линии. Равномерное движение – такое, в процессе которого тело за равные временные промежутки проходит один и тот же путь. Если объединить эти два определения получится третье:
- равномерное прямолинейное движение – это такое движение, в ходе которого 1) тело совершает движение по прямой линии; 2) за одинаковые временные промежутки проходит одинаковый путь.
Зная определения пути и перемещения, это определение можно упростить: прямолинейное равномерное движение тела – это такое движение, в процессе которого тело за одинаковые временные промежутки совершает равные перемещения.
Важной характеристикой является скорость механического движения. Предположим, что при равномерном прямолинейном движении тело за промежуток времени △t перемещается из точки А в точку Б (см. рисунок 8). Радиус-вектор, проведенный в точку A обозначим r0, а радиус-вектор в точку Б обозначим r1. Изменение радиус-вектора назовем △r – нетрудно заметить, что это есть перемещение тела за время △t.

Рисунок 8 – Поиск перемещения тела через радиус-векторы при равномерном прямолинейном движении
Тогда скорость движения (v) будет вычисляться по формуле:

Так как △r – вектор, △t – скаляр, скорость v тоже будет вектором, сонаправленным перемещению.
Если тело начинает двигаться в момент начала отсчета, то △t = t*. Из правила сложения векторов следует, что △r = r1 – r0. Тогда выражение для скорости можно переписать в виде:

Из этого выражения следует:
r1 = r0 + v*t.
Это выражение можно применить к любому произвольно взятому моменту времени, поэтому можно опустить индекс в левой части и переписать:
r = r0 + v*t.
Данное уравнение является уравнением движения при прямолинейном равномерном движении.
*Напоминание: символом △ (дельта) обозначают изменение какой-нибудь величины. Например △t = t – t1, где t – конечный момент времени, t1 – начальный. Если же начальный момент времени совпадает с началом отсчета t1 = 0, то △t = t – 0 = t.
Фактически уравнение равномерного прямолинейного движения означает, что радиус-вектор в произвольный момент времени t можно посчитать, сложив начальный радиус-вектор и приращение v*t.
Найдя проекции радиус-вектора и вектора скорости, можно разложить уравнение движения тела на три составляющие вдоль осей ОX, ОY и ОZ.
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
В этих выражениях r0x, r0y, r0z и vx, vy, vz – это компоненты изначальных векторов r0 и v вдоль осей ОХ, ОY и ОZ соответственно. И теперь можно перейти к скалярному виду:
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
Стоит отметить, что при проецировании какие-то компоненты вектора могут стать отрицательными, тогда знаки в выражениях поменяются на противоположные.
В рассмотренном выше примере движение происходит только вдоль оси ОХ (остальные координаты не изменяются). На рисунке 9 приведены проекции начальной (х0) и конечной (х1) точки на ось ОХ.

Рисунок 9 – Перемещение тела в координатном представлении
Уравнение координаты (х) движения будет выглядеть:
x(t) = x0 + v*t.
А это уже похоже на знакомую из прошедшего курса физики формулу для нахождения пути:
S(t) = S0 + v*t.
Если точка начала двигаться из начала отсчета S0 = 0, можно переписать эту формулу в виде:
S(t) = v*t.
Отсюда следуют известные уже формулы для нахождения скорости и времени при равномерном прямолинейном движении:

Приведем последний в этой статье пример: известно, что тело движется вдоль оси ОХ, начиная из точки x0 = 3 см. Скорость тела равна v = 5 м/с и направлена вдоль оси ОХ. Необходимо записать уравнение движения по координате х для этого тела.
Итак, для начала приведем все единицы измерения к СИ:
x0 = 3 см = 0,03 м.
Теперь можно записывать уравнение для координаты х:
x(t) = x0 + v*t = 0,03 + 5*t.
Из этого уравнения можно найти координату тела в любой момент времени. Например, через 2 секунды после начала отсчета тело находилось в точке:
x(2) = 0,03 + 5*2 = 10, 03.
А какой путь прошло тело к этому моменту? В начале оно находилось в точке x(2) = 0,03 м, а через 2 секунды оно стало находиться в точке x(2) = 10, 03. Значит за 2 секунды тело прошло:
S = x(2) – x0 = 10, 03 – 0,03 = 10 м.
А если скорость тела была направлена противоположно оси ОХ, как тогда выглядело бы уравнение движения?
Тогда проекция вектора скорости на ось ОХ была бы отрицательной и в уравнении знак перед скоростью поменялся бы на противоположный:
x(t) = x0 – v*t = 0,03 – 5*t.
