Нормальный вектор плоскости, координаты нормального вектора плоскости
Существует ряд заданий, которым для решения необходимо нормальный вектор на плоскости, чем саму плоскость. Поэтому в этой статье получим ответ на вопрос определения нормального вектора с примерами и наглядными рисунками. Определим векторы трехмерного пространства и плоскости по уравнениям.
Нормальный вектор плоскости – определение, примеры, иллюстрации
Чтобы материал легко усваивался, необходимо предварительно изучить теорию о прямой в пространстве и представление ее на плоскости и векторы.
Нормальным вектором плоскости считается любой ненулевой вектор, который лежит на перпендикулярной к данной плоскости прямой.
Отсюда следует, что имеет место существование большого количества нормальных векторов в данной плоскости. Рассмотрим на рисунке, приведенном ниже.
Нормальные векторы располагаются на параллельных прямых, поэтому они все коллинеарны. То есть, при нормальном векторе n → , расположенном в плоскости γ , вектор t · n → , имея ненулевое значение параметра t , также нормальный вектор плоскости γ . Любой вектор может быть рассмотрен как направляющий вектор прямой, которая перпендикулярна этой плоскости.
Имеются случаи совпадения нормальных векторов плоскостей из-за перпендикулярности одной из параллельных плоскостей, так как прямая перпендикулярна и второй плоскости. Отсюда следует, что нормальные векторы перпендикулярных плоскостей должны быть перпендикулярными.
Рассмотрим на примере нормального вектора на плоскости.
Задана прямоугольная система координат О х у z в трехмерном пространстве. Координатные векторы i → , j → , k → считаются нормальными векторами плоскостей O y z , O x z и O x y . Это суждение верно, так как i → , j → , k → ненулевые и расположены на координатных прямых O x , O y и O z . Эти прямые перпендикулярны координатным плоскостям O y z , O x z и O x y .
Координаты нормального вектора плоскости – нахождение координат нормального вектора плоскости из уравнения плоскости
Статья предназначена для того, чтобы научить находить координаты нормального вектора плоскости при известном уравнении плоскости прямоугольной системы координат О х у z . Для определения нормального вектора n → = ( A , B , C ) в плоскости необходимо наличие общего уравнения плоскости, имеющее вид A x + B y + C z + D = 0 . То есть достаточно иметь уравнение плоскости, тогда появится возможность для нахождения координат нормального вектора.
Найти координаты нормального вектора, принадлежащего плоскости 2 x – 3 y + 7 z – 11 = 0 .
По условию имеем уравнение плоскости. Необходимо обратить внимание на коэффициенты, так как они и являются координатами нормального вектора заданной плоскости. Отсюда получаем, что n → = ( 2 , – 3 , 7 ) – это нормальный вектор плоскости. Все векторы плоскости задаются при помощи формулы t · n → = 2 · t , – 3 · t , 7 · t , t является любым действительным числом не равным нулю.
Ответ: n → = ( 2 , – 3 , 7 ) .
Определить координаты направляющих векторов заданной плоскости x + 2 z – 7 = 0 .
По условию имеем, что дано неполное уравнение плоскости. Чтобы увидеть координаты, необходимо преобразовать уравнение x + 2 z – 7 = 0 к виду 1 · x + 0 · y + 2 z – 7 = 0 . Отсюда получим, что координаты нормального вектора данной плоскости равны ( 1 , 0 , 2 ) . Тогда множество векторов будет иметь такую форму записи ( t , 0 , 2 · t ) , t ∈ R , t ≠ 0 .
Ответ: ( t , 0 , 2 · t ) , t ∈ R , t ≠ 0 .
При помощи уравнения плоскости в отрезках, имеющего вид x a + y b + z c = 1 , и общего уравнения плоскости возможна запись нормального вектора этой плоскости, где координаты равны 1 a , 1 b , 1 c .
Знания о нормальном векторе позволяют с легкостью решать задачи. Часто встречающимися задачами являются задания с доказательствами параллельности или перпендикулярности плоскостей. Заметно упрощается решение задач на составление уравнений заданной плоскости. Если имеется вопрос о нахождении угла между плоскостями или между прямой и плоскостью, то формулы нормального вектора и нахождения его координат помогут в этом.
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.

Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:
Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.

Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора.
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма

Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и
.
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:

Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и
. Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и
:

2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.

Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму:
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.

Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и
, а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.

Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
То есть A + C + D = 0.
Аналогично для точки K:
Получили систему из трех уравнений:
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
Выразим C и B через A и подставим в третье уравнение:
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.

Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.

Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 🙂
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать “параллелепипед”.

Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор
.
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей),
— нормаль к плоскости α.

Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат

Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD =
. Высота параллелепипеда AA1 =
. Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:

Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
Уравнения прямых и плоскостей
Поверхности и линии первого порядка.
Уравнение первой степени, или линейное уравнение, связывающее координаты точки в пространстве, имеет вид
$$
Ax+By+Cz+D = 0,label
$$
причем предполагается, что коэффициенты при переменных не равны нулю одновременно, то есть (A^<2>+B^<2>+C^ <2>neq 0). Аналогично, линейное уравнение, связывающее координаты точки на плоскости, — это уравнение
$$
Ax+By+C = 0,label
$$
при условии (A^<2>+B^ <2>neq 0).
В школьном курсе доказывается, что в декартовой прямоугольной системе координат уравнения eqref и eqref определяют соответственно плоскость и прямую линию на плоскости. Из теорем о порядке алгебраических линий и поверхностей следует, что то же самое верно и в общей декартовой системе координат. Точнее, имеют место следующие теоремы.
В общей декартовой системе координат в пространстве каждая плоскость может быть задана линейным уравнением
$$
Ax+By+Cz+D = 0.nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат определяет плоскость.
В общей декартовой системе координат на плоскости каждая прямая может быть задана линейным уравнением
$$
Ax+By+C = 0,nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости и прямой линии на плоскости. Однако ввиду важности этих уравнений мы рассмотрим их в других формах. При этом будут получены независимые доказательства теорем этого пункта.
Параметрические уравнения прямой и плоскости.
Мы будем предполагать, что задана декартова система координат в пространстве (или на плоскости, если мы изучаем прямую в планиметрии). Это, в частности, означает, что каждой точке сопоставлен ее радиус-вектор относительно начала координат.
Рис. 6.1
Вектор (overrightarrowM> = boldsymbol-boldsymbol_<0>), начало которого лежит на прямой, параллелен прямой тогда и только тогда, когда (M) также лежит на прямой. В этом и только этом случае для точки (M) найдется такое число (t), что
$$
boldsymbol-boldsymbol_ <0>= tboldsymbol.label
$$
Наоборот, какое бы число мы ни подставили в формулу eqref в качестве (t), вектор (boldsymbol) в этой формуле определит некоторую точку на прямой.
Уравнение eqref называется векторным параметрическим уравнением прямой, а переменная величина (t), принимающая любые вещественные значения, называется параметром.
Векторное параметрическое уравнение выглядит одинаково и в планиметрии, и в стереометрии, но при разложении по базису оно сводится к двум или трем скалярным уравнениям, смотря по тому, сколько векторов составляют базис.
Получим теперь параметрические уравнения плоскости. Обозначим через (boldsymbol
) и (boldsymbol) ее направляющие векторы, а через (boldsymbol_<0>) — радиус-вектор ее начальной точки (M_<0>). Пусть точка (M) с радиус-вектором (boldsymbol) — произвольная точка пространства (рис. 6.2).
Рис. 6.2
Вектор (overrightarrowM> = boldsymbol-boldsymbol_<0>), начало которого лежит на плоскости, параллелен ей тогда и только тогда, когда его конец (M) также лежит на плоскости. Так как (boldsymbol
) и (boldsymbol) не коллинеарны, в этом и только этом случае (boldsymbol-boldsymbol_<0>) может быть по ним разложен. Поэтому, если точка (M) лежит в плоскости (и только в этом случае), найдутся такие числа (t_<1>) и (t_<2>), что
$$
boldsymbol-boldsymbol_ <0>= t_<1>boldsymbol
+t_<2>boldsymbol.label
$$
Это уравнение называется параметрическим уравнением плоскости. Каждой точке плоскости оно сопоставляет значения двух параметров (t_<1>) и (t_<2>). Наоборот, какие бы числа мы ни подставили как значения (t_<1>) и (t_<2>), уравнение eqref определит некоторую точку плоскости.
Пусть ((x, y, z)) и ((x_<0>, y_<0>, z_<0>)) — координаты точек (M) и (M_<0>) соответственно, а векторы (boldsymbol
) и (boldsymbol) имеют компоненты ((p_<1>, p_<2>, p_<3>)) и ((q_<1>, q_<2>, q_<3>)). Тогда, раскладывая по базису обе части уравнения eqref, мы получим параметрические уравнения плоскости
$$
x-x_ <0>= t_<1>p_<1>+t_<2>q_<1>, y-y_ <0>= t_<1>p_<2>+t_<2>q_<2>, z-z_ <0>= t_<1>p_<3>+t_<2>q_<3>.label
$$
Отметим, что начальная точка и направляющий вектор прямой образуют на ней ее внутреннюю декартову систему координат. Значение параметра (t), соответствующее какой-то точке, является координатой этой точки во внутренней системе координат. Точно так же на плоскости начальная точка и направляющие векторы составляют внутреннюю систему координат, а значения параметров, соответствующие точке, — это ее координаты в этой системе.
Прямая линия на плоскости.
Поэтому мы можем сформулировать следующее утверждение.
В любой декартовой системе координат на плоскости уравнение прямой с начальной точкой (M_<0>(x_<0>, y_<0>)) и направляющим вектором (boldsymbol(a_<1>, a_<2>)) может быть записано в виде eqref.
Уравнение eqref линейное. Действительно, после преобразования оно принимает вид (a_<2>x-a_<1>y+(a_<1>y_<0>-a_<2>x_<0>) = 0), то есть (Ax+By+C = 0), где (A = a_<2>), (B = -a_<1>) и (C = a_<1>y_<0>-a_<2>x_<0>).
Вектор с координатами ((-B, A)) можно принять за направляющий вектор прямой с уравнением eqref в общей декартовой системе координат, а точку eqref за начальную точку.
Если система координат декартова прямоугольная, то вектор (boldsymbol(A, B)) перпендикулярен прямой с уравнением eqref.
Действительно, в этом случае ((boldsymbol, boldsymbol) = -BA+AB = 0).
Пусть в уравнении прямой (Ax+By+C = 0) коэффициент (B) отличен от нуля. Это означает, что отлична от нуля первая компонента направляющего вектора, и прямая не параллельна оси ординат. В этом случае уравнение прямой можно представить в виде
$$
y = kx+b,label
$$
где (k = -A/B), а (b = -C/B). Мы видим, что к равно отношению компонент направляющего вектора: (k = a_<2>/a_<1>) (рис. 6.3).
Рис. 6.3. k=-1. Прямая y=-x+1/2
Отношение компонент направляющего вектора (a_<2>/a_<1>) называется угловым коэффициентом прямой.
Угловой коэффициент прямой в декартовой прямоугольной системе координат равен тангенсу угла, который прямая образует с осью абсцисс. Угол этот отсчитывается от оси абсцисс в направлении кратчайшего поворота от (boldsymbol_<1>) к (boldsymbol_<2>) (рис. 6.4).
Рис. 6.4. (k=operatornamevarphi = -1). Прямая (y=-x+1/2)
Положив (x = 0) в уравнении eqref, получаем (y = b). Это означает, что свободный член уравнения (b) является ординатой точки пересечения прямой с осью ординат.
Если же в уравнении прямой (B = 0) и ее уравнение нельзя представить в виде eqref, то обязательно (A neq 0). В этом случае прямая параллельна оси ординат и ее уравнению можно придать вид (x = x_<0>), где (x_ <0>= -C/A) — абсцисса точки пересечения прямой с осью абсцисс.
Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка (M) лежит на плоскости тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки (M_<0>) компланарна направляющим векторам (boldsymbol
) и (boldsymbol). Эту компланарность можно выразить и равенством
$$
(boldsymbol-boldsymbol_<0>, boldsymbol
, boldsymbol) = 0.label
$$
Вектор (boldsymbol = [boldsymbol
, boldsymbol]) — ненулевой вектор, перпендикулярный плоскости. Используя его, мы можем записать уравнение eqref в виде
$$
(boldsymbol-boldsymbol_<0>, boldsymbol) = 0.label
$$
Уравнения eqref и eqref называют векторными уравнениями плоскости. Им можно придать форму, в которую не входит радиус-вектор начальной точки. Например, положив в eqref (D = -(boldsymbol_<0>, boldsymbol)), получим
$$
(boldsymbol, boldsymbol)+D = 0.label
$$
Для прямой на плоскости можно также написать векторные уравнения, аналогичные eqref и eqref,
$$
(boldsymbol-boldsymbol_<0>, boldsymbol) = 0 mbox<или> (boldsymbol, boldsymbol)+C = 0.nonumber
$$
Первое из них выражает тот факт, что вектор (boldsymbol-boldsymbol_<0>) перпендикулярен ненулевому вектору (boldsymbol), перпендикулярному направляющему вектору (boldsymbol), и потому коллинеарен (boldsymbol).
Пусть (x, y, z) — компоненты вектора (boldsymbol) в общей декартовой системе координат. Тогда скалярное произведение ((boldsymbol-boldsymbol_<0>, boldsymbol)) при (boldsymbol neq 0) записывается линейным многочленом (Ax+By+Cz+D), где ((A^<2>+B^<2>+C^ <2>neq 0)).
Обратно, для любого линейного многочлена найдутся такие векторы (boldsymbol_<0>) и (boldsymbol neq 0), что в заданной общей декартовой системе координат (Ax+By+Cz+D = (boldsymbol-boldsymbol_<0>, boldsymbol)).
Первая часть предложения очевидна: подставим разложение вектора (boldsymbol) по базису в данное скалярное произведение:
$$
(xboldsymbol_<1>+yboldsymbol_<2>+zboldsymbol_<3>-boldsymbol_<0>, boldsymbol),nonumber
$$
раскроем скобки и получим многочлен (Ax+By+Cz+D), в котором (D = -(boldsymbol_<0>, boldsymbol)) и
$$
A = (boldsymbol_<1>, boldsymbol), B = (boldsymbol_<2>, boldsymbol), C = (boldsymbol_<3>, boldsymbol)label
$$
(A), (B) и (C) одновременно не равны нулю, так как ненулевой вектор (boldsymbol) не может быть ортогонален всем векторам базиса.
Для доказательства обратного утверждения найдем сначала вектор (boldsymbol) из равенств eqref, считая (A), (B) и (C) заданными. Из ранее доказанного утверждения 10 следует, что
$$
boldsymbol = frac_<2>, boldsymbol_<3>]><(boldsymbol_<1>, boldsymbol_<2>, boldsymbol_<3>)>+frac_<3>, boldsymbol_<1>]><(boldsymbol_<1>, boldsymbol_<2>, boldsymbol_<3>)>+frac_<1>, boldsymbol_<2>]><(boldsymbol_<1>, boldsymbol_<2>, boldsymbol_<3>)>.label
$$
Вектор (boldsymbol_<0>) должен удовлетворять условию (D = -(boldsymbol_<0>, boldsymbol)). Один из таких векторов можно найти в виде (boldsymbol_ <0>= lambda boldsymbol). Подставляя, видим, что (-lambda(boldsymbol, boldsymbol) = D), откуда (boldsymbol_ <0>= -Dboldsymbol/|boldsymbol|^<2>).
Итак, мы нашли векторы (boldsymbol) и (boldsymbol_<0>) такие, что линейный многочлен записывается в виде
$$
x(boldsymbol_<1>, boldsymbol)+y(boldsymbol_<2>, boldsymbol)+z(boldsymbol_<3>, boldsymbol)-(boldsymbol_<0>, boldsymbol),nonumber
$$
который совпадает с требуемым ((boldsymbol-boldsymbol_<0>, boldsymbol)).
Если система координат декартова прямоугольная, то вектор с компонентами (A), (B), (C) является нормальным вектором для плоскости с уравнением (Ax+By+Cz+D = 0).
Это сразу вытекает из формул eqref и доказанного ранее утверждения о нахождении компонент в ортогональном базисе.
Любые два неколлинеарных вектора, удовлетворяющие уравнению eqref, можно принять за направляющие векторы плоскости.
Утверждение 5 нетрудно доказать и непосредственно, рассматривая координаты вектора, параллельного плоскости, как разности соответствующих координат двух точек, лежащих в плоскости.
Все, сказанное о плоскостях, почти без изменений может быть сказано и о прямых на плоскости. В частности, верно следующее утверждение.
Действительно, (alpha_<1>, alpha_<2>), должны быть пропорциональны компонентам — (B), (A) направляющего вектора прямой.
Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем считать, что параллельные плоскости (или прямые) не обязательно различны, то есть что плоскость (прямая) параллельна самой себе.
Прямые линии, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+C = 0, A_<1>x+B_<1>y+C_ <1>= 0,nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число (lambda), что
$$
A_ <1>= lambda A, B_ <1>= lambda B.label
$$
Прямые совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнения eqref выполнено (с тем же (lambda)) равенство
$$
C_ <1>= lambda C.label
$$
Первая часть предложения прямо следует из того, что векторы с компонентами ((-B, A)) и ((-B_<1>, A_<1>)) — направляющие векторы прямых.
Докажем вторую часть. В равенствах eqref и eqref (lambda neq 0), так как коэффициенты в уравнении прямой одновременно нулю не равны. Поэтому, если эти равенства выполнены, уравнения эквивалентны и определяют одну и ту же прямую.
Обратно, пусть прямые параллельны. В силу первой части предложения их уравнения должны иметь вид (Ax+By+C = 0) и (lambda(Ax+By)+C_ <1>= 0) при некотором (lambda). Если, кроме того, существует общая точка (M_<0>(x_<0>, y_<0>)) обеих прямых, то (Ax_<0>+By_<0>+C = 0) и (lambda(Ax_<0>+By_<0>)+C_ <1>= 0). Вычитая одно равенство из другого, получаем (C_ <1>= lambda C), как и требовалось.
Плоскости, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+Cz+D = 0, A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число (lambda), что
$$
A_ <1>= lambda A, B_ <1>= lambda B, C_ <1>= lambda C.label
$$
Плоскости совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнений eqref выполнено (с тем же (lambda)) равенство
$$
D_ <1>= lambda D.label
$$
Если плоскости параллельны, то их нормальные векторы (boldsymbol) и (boldsymbol_<1>) коллинеарны, и существует такое число (lambda), что (boldsymbol_ <1>= lambdaboldsymbol). В силу уравнений eqref (A_ <1>= (boldsymbol_<1>, boldsymbol_<1>) = lambda(boldsymbol_<1>, boldsymbol) = lambda A). Аналогично доказываются и остальные равенства eqref. Обратно, если равенства eqref выполнены, то из формулы eqref следует, что (boldsymbol_ <1>= lambdaboldsymbol). Это доказывает первую часть предложения. Вторая его часть доказывается так же, как вторая часть предложения 7.
Условия eqref выражают не что иное, как коллинеарность векторов с компонентами ((A, B)) и ((A_<1>, B_<1>)). Точно так же условия eqref означают коллинеарность векторов с компонентами ((A, B, C)) и ((A_<1>, B_<1>, C_<1>)). Поэтому согласно ранее доказанным этому и этому утверждениям условие параллельности прямых на плоскости можно записать в виде
$$
begin
A& B\
A_<1>& B_<1>
end
= 0,label
$$
а условие параллельности плоскостей — в виде
$$
begin
B& C\
B_<1>& C_<1>
end =
begin
C& A\
C_<1>& A_<1>
end =
begin
A& B\
A_<1>& B_<1>
end
= 0.label
$$
Утверждению 7 можно придать чисто алгебраическую формулировку, если учесть, что координаты точки пересечения прямых — это решение системы, составленной из их уравнений.
При условии eqref система линейных уравнений
$$
Ax+By+C = 0, A_<1>x+B_<1>y+C_ <1>= 0,nonumber
$$
не имеет решений или имеет бесконечно много решений (в зависимости от (C) и (C_<1>). В последнем случае система равносильна одному из составляющих ее уравнений. Если же
$$
begin
A& B\
A_<1>& B_<1>
end
neq 0.nonumber
$$
то при любых (C) и (C_<1>) система имеет единственное решение ((x, y)).
Уравнения прямой в пространстве.
Прямая линия в пространстве может быть задана как пересечение двух плоскостей и, следовательно, в общей декартовой системе координат определяется системой уравнений вида
$$
left<begin
Ax+By+Cz+D = 0,\
A_<1>x+B_<1>y+C_<1>z+D_ <1>= 0.
endright.label
$$
Пересечение плоскостей — прямая линия тогда и только тогда, когда они не параллельны, что согласно eqref означает, что хоть один из детерминантов отличен от нуля:
$$
begin
B& C\
B_<1>& C_<1>
end^ <2>+
begin
C& A\
C_<1>& A_<1>
end^ <2>+
begin
A& B\
A_<1>& B_<1>
end^<2>
neq 0.label
$$
Разумеется, систему eqref можно заменить на любую, ей эквивалентную. При этом прямая будет представлена как пересечение двух других проходящих через нее плоскостей.
Вспомним параметрические уравнения прямой eqref. Допустим, что в них ни одна из компонент направляющего вектора не равна нулю. Тогда
$$
t = frac><alpha_<1>>, t = frac><alpha_<2>>, t = frac><alpha_<3>>,nonumber
$$
и мы получаем два равенства
$$
frac><alpha_<2>> = frac><alpha_<3>>, frac><alpha_<1>> = frac><alpha_<3>>,label
$$
или, в более симметричном виде,
$$
frac><alpha_<1>> = frac><alpha_<2>> = frac><alpha_<3>>,label
$$
Уравнения eqref представляют прямую как линию пересечения двух плоскостей, первая из которых параллельна оси абсцисс (в ее уравнение не входит переменная (x)), а вторая параллельна оси ординат.
Если обращается в нуль одна из компонент направляющего вектора, например, (alpha_<1>), то уравнения прямой принимают вид
$$
x = x_<0>, frac><alpha_<2>> = frac><alpha_<3>>,label
$$
Эта прямая лежит в плоскости (x = x_<0>) и, следовательно, параллельна плоскости (x = 0). Аналогично пишутся уравнения прямой, если в нуль обращается не (alpha_<1>), а другая компонента.
Когда равны нулю две компоненты направляющего вектора, например, (alpha_<1>) и (alpha_<2>), то прямая имеет уравнения
$$
x = x_<0>, y = y_<0>.label
$$
Такая прямая параллельна одной из осей координат, в нашем случае — оси аппликат.
Важно уметь находить начальную точку и направляющий вектор прямой, заданной системой линейных уравнений eqref. По условию eqref один из детерминантов отличен от нуля. Допустим для определенности, что (AB_<1>-A_<1>B neq 0). В силу утверждения 9 при любом фиксированном (z) система уравнений будет иметь единственное решение ((x, y)), в котором (x) и (y), разумеется, зависят от (z). Они — линейные многочлены от (z): (x = alpha_<1>z+beta_<1>), (y = alpha_<2>z+beta_<2>).
Не будем доказывать этого, хотя это и не трудно сделать. Для ясности, заменяя (z) на (t), получаем параметрические уравнения прямой
$$
x = alpha_<1>t+beta_<1>, y = alpha_<2>t+beta_<2>, z = t.nonumber
$$
Первые две координаты начальной точки прямой (M_<0>(beta_<1>, beta_<2>, 0)) можно получить, решая систему eqref при значении (z = 0).
Из параметрических уравнений видно, что в этом случае направляющий вектор имеет координаты ((alpha_<1>, alpha_<2>, 1)). Найдем его компоненты в общем виде. Если система координат декартова прямоугольная, векторы с компонентами ((A, B, C)) и (A_<1>, B_<1>, C_<1>) перпендикулярны соответствующим плоскостям, а потому их векторное произведение параллельно прямой eqref, по которой плоскости пересекаются. Вычисляя векторное произведение в ортонормированном базисе, мы получаем компоненты направляющего вектора
$$
begin
B& C\
B_<1>& C_<1>
end,
begin
C& A\
C_<1>& A_<1>
end,
begin
A& B\
A_<1>& B_<1>
end.label
$$
Вектор с компонентами eqref есть направляющий вектор прямой с уравнениями eqref, какова бы ни была декартова система координат.
Согласно утверждению 5 каждый ненулевой вектор, компоненты которого ((alpha_<1>, alpha_<2>, alpha_<3>)) удовлетворяют уравнению (Aalpha_<1>+Balpha_<2>+Calpha_ <3>= 0), параллелен плоскости с уравнением (Ax+By+Cz+D = 0). Если, кроме того, он удовлетворяет уравнению (A_<1>alpha_<1>+B_<1>alpha_<2>+C_<1>alpha_ <3>= 0), то он параллелен и второй плоскости, то есть может быть принят за направляющий вектор прямой. Вектор с компонентами eqref ненулевой в силу неравенства eqref. Непосредственно легко проверить, что его компоненты удовлетворяют обоим написанным выше условиям. На этом доказательство заканчивается.
[spoiler title=”источники:”]
http://ege-study.ru/ru/ege/materialy/matematika/vektory-v-prostranstve-i-metod-koordinat/
http://univerlib.com/analytic_geometry/vector_algebra/lines_and_planes_equations/
[/spoiler]
Министерство
образования и науки РФ
Федеральное
государственное бюджетное
образовательное
учреждение
высшего
профессионального образования
«Уральский
государственный педагогический
университет»
Толстопятов В.П.
ГЕОМЕТРИЯ
Курс
лекций 2 семестр
Учебное пособие
Екатеринбург
2012
Геометрия.
Курс лекций / Учебное пособие / Урал.
гос. пед. ун-т. – Екатеринбург, 2012. – 47
с.
Толстопятов
В.П., к.ф.-м.н., профессор кафедры геометрии
УрГПУ
.
Уральский
государственный
педагогический
университет, 2012
СОДЕРЖАНИЕ
Раздел
III. Аналитическая стереометрия 4
Раздел
IV. Геометрические преобразования
плоскости и пространства 21
Литература 40
Раздел III.
Аналитическая стереометрия
Лекция 1. Плоскость в пространстве как
поверхность первого порядка. Задание
полупространства. Расстояние от точки
до плоскости
§1. Аффинная система координат в
пространстве
О
п р е д е л е н и е. Аффинной
системой координат в пространстве
(аффинным
репером)
называется точка и три некомпланарных
вектора:
![]() .
.
Прямые
![]() ,
,![]() ,
,![]() ,
,
определяемые точкой![]() и векторами
и векторами![]() ,
,![]() ,
,![]() называются соответственно осью абсцисс,
называются соответственно осью абсцисс,
осью ординат и осью аппликат.
Частным
случаем аффинной системы координат
является прямоугольная
система координат
![]() ,
,
определяемая точкой![]() и ортогональными ортами
и ортогональными ортами![]() .
.
О
п р е д е л е н и е. Вектор
![]() называетсярадиус-вектором
называетсярадиус-вектором
точки
![]() .
.
О п р е
д е л е н и е.
Координатами точки
называются координаты её радиус-вектора:
![]() .
.
У
п р а ж н е н и е. Построить точку по
координатам в заданном аффинном репере
в пространстве.
Аналогично
тому, как это делалось на плоскости, с
помощью координат
решаются
простейшие
задачи
-
Определение
координат вектора по координатам начала
и конца в аффинной системе координат. -
Определение
координат точки по заданному простому
отношению трех точек прямой и координатам
двух из них в аффинной системе координат. -
Вычисление
расстояния между точками по координатам
относительно прямоугольной системы
координат
 .
.
Задавая
в пространстве аффинную систему
координат, мы устанавливаем взаимно
однозначное соответствие между точками
и упорядоченными тройками действительных
чисел. Это позволяет находить условие,
определяющее геометрическую фигуру.
Под
условием, определяющим геометрическую
фигуру,
понимаем упорядоченные тройки
действительных чисел, уравнения,
неравенства или их системы, которым
удовлетворяют координаты любой точки,
принадлежащей фигуре, и не удовлетворяют
координаты точек, не принадлежащих
фигуре.
Тогда геометрическую
задачу можно перевести на язык алгебры,
решить методами алгебры и полученный
результат интерпретировать геометрически.
Через
данную точку
![]() проходит единственная плоскость
проходит единственная плоскость![]() ,
,
параллельная двум данным неколлинеарным
векторам![]() и
и![]() .
.
Пусть
в пространстве задан аффинный репер
![]() и
и![]() ,
,![]() .
.
Точка![]() принадлежит плоскости
принадлежит плоскости![]() тогда и только тогда, когда векторы
тогда и только тогда, когда векторы![]() компланарны, то есть вектор
компланарны, то есть вектор![]() можно выразить через векторы
можно выразить через векторы![]() и
и![]() :
:
![]() .
.
Переходя
к координатам, найдем уравнения, которым
должны удовлетворять координаты
![]() точки, принадлежащей плоскости:
точки, принадлежащей плоскости:
 –параметрические
–параметрические
уравнения плоскости.
Условием
компланарности векторов
![]() является равенство нулю определителя,
является равенство нулю определителя,
составленного из координат этих векторов:
 –общее
–общее
уравнение плоскости.
Общее уравнение
плоскости приводится к виду
![]() ,
,
где
![]() .
.
Пусть
плоскость
![]() пересекает все три оси координат в
пересекает все три оси координат в
точках![]() .
.
Имеем два неколлинеарных вектора![]() и
и![]() ,
,
параллельных плоскости![]() .
.
Тогда получаем уравнение плоскости
 или
или
![]() –уравнение
–уравнение
плоскости в отрезках.
Через
данную точку
![]() проходит единственная плоскость
проходит единственная плоскость![]() ,
,
перпендикулярная данному ненулевому
вектору![]() .
.
Вектор![]() ,
,
как и любой другой ненулевой вектор,
перпендикулярный плоскости![]() ,
,
называетсянормальным
вектором плоскости.
Точка
![]() принадлежит плоскости
принадлежит плоскости![]() тогда и только тогда, когда векторы
тогда и только тогда, когда векторы![]() и
и![]() ортогональны, то есть их скалярное
ортогональны, то есть их скалярное
произведение равно нулю. Чтобы выразить
условие ортогональности векторов через
координаты, необходим ортонормированный
базис, а значит, в пространстве должна
быть задана прямоугольная система
координат![]() .
.
Пусть![]() ,
,![]() .
.
Выразив условие ортогональности векторов![]() и
и![]() через координаты, получим уравнение
через координаты, получим уравнение
плоскости![]() :
:![]() .
.
Выводы:
-
Чтобы
составить уравнение плоскости, надо
знать точку и два неколлинеарных
вектора, параллельных этой плоскости,
либо точку и нормальный вектор. -
Уравнение
плоскости приводится к виду
 ,
,
где –общее
–общее
уравнение плоскости,
то есть плоскость является алгебраической
поверхностью первого порядка.
Т
е о р е м а. Любая
алгебраическая поверхность первого
порядка является плоскостью.
Д
о к а з а т е л ь с т в о. Для алгебраической
поверхности первого порядка существует
аффинная система координат, относительно
которой поверхность задается уравнением
![]() ,
,
где![]() .
.
Пусть
![]() .
.
Приведя уравнение поверхности к виду![]() ,
,
получим равносильное уравнение
 .
.
Это есть
уравнение плоскости, проходящей через
точку
![]() параллельно векторам
параллельно векторам![]() и
и![]() .
.
§3. Условие параллельности плоскости и вектора
Относительно
аффинной системы координат
![]() плоскость
плоскость![]() задана уравнением
задана уравнением![]() .
.
Найдем условие параллельности вектора![]() плоскости
плоскости![]() .
.
От
точки
![]() ,
,
принадлежащей плоскости![]() ,
,
отложим вектор![]() .
.
Точка![]() будет иметь координаты
будет иметь координаты
![]() .
.
Вектор
![]() параллелен плоскости
параллелен плоскости![]() тогда и только тогда, когда точка
тогда и только тогда, когда точка![]() лежит в плоскости
лежит в плоскости![]() ,
,
то есть
![]() .
.
Подставляя
координаты точки
![]() и учитывая, что
и учитывая, что![]() ,
,
получим
условие параллельности вектора и
плоскости:
![]() .
.
(*)
Очевидно,
вектор
![]() не параллелен плоскости
не параллелен плоскости![]() .
.
Если система координат прямоугольная,
то из условия (*) следует, что вектор![]() ортогонален любому вектору
ортогонален любому вектору![]() ,
,
параллельному плоскости, то есть является
нормальным вектором этой плоскости.
§4. Взаимное расположение двух плоскостей
Относительно
аффинной системы координат в пространстве
![]() две плоскости заданы своими уравнениями:
две плоскости заданы своими уравнениями:
![]() .
.
Пусть
в уравнении
![]()
![]() .
.
Тогда определяются точка![]() ,
,
принадлежащая плоскости, и два вектора![]() и
и![]() ,
,
параллельные этой плоскости.
Плоскости
![]() и
и![]() совпадают тогда и только тогда, когда
совпадают тогда и только тогда, когда
векторы![]() и
и![]() параллельны плоскости
параллельны плоскости![]() и точка
и точка![]() принадлежит этой плоскости:
принадлежит этой плоскости:
 –коэффициенты
–коэффициенты
и свободные члены в общих уравнениях
плоскостей пропорциональны.
Плоскости
![]() и
и![]() параллельны тогда и только тогда, когда
параллельны тогда и только тогда, когда
векторы![]() и
и![]() параллельны плоскости
параллельны плоскости![]() и точка
и точка![]() не принадлежит этой плоскости:
не принадлежит этой плоскости:
 –в
–в
общих уравнениях плоскостей коэффициенты
пропорциональны и не пропорциональны
свободным членам.
Плоскости
![]() и
и![]() пересекаются тогда и только тогда, когда
пересекаются тогда и только тогда, когда
хотя бы один из векторов![]() и
и![]() не параллелен плоскости
не параллелен плоскости![]() ,
,
то есть имеет место хотя бы одно из
неравенств![]() или
или![]() ,
,
а значит, в общих уравнениях плоскостей
коэффициенты не пропорциональны.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
30.04.201518.68 Mб21Ganshina.pdf
- #
- #
- #
- #
- #
- #
- #
- #
30.04.2015275.03 Кб58Geometry.pdf
Содержание:
Система координат на плоскости позволяет установить взаимно однозначное соответствие между точками плоскости и упорядоченными парами чисел (рис. 331). Координаты вы широко использовали для графического представления зависимостей, при решении систем уравнений, а также в геометрии, чтобы геометрическую задачу свести к задаче алгебраической.
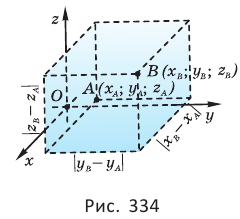
Декартова система координат в пространстве
Чтобы ввести декартову систему координат в пространстве, выберем точку 
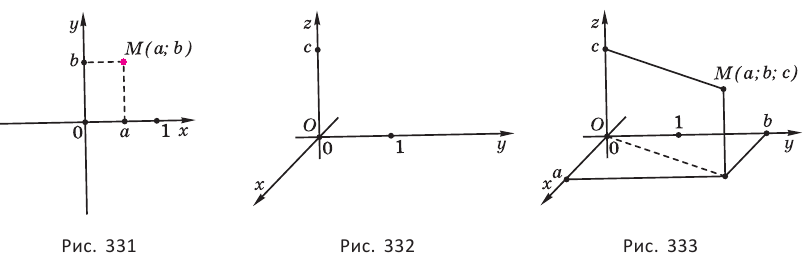
Б) Вы знаете, что по координатам концов  и
и  отрезка
отрезка  на плоскости можно определить его длину:
на плоскости можно определить его длину:

Аналогичная формула выражает длину отрезка  в пространстве через координаты его концов
в пространстве через координаты его концов  и
и 

Чтобы доказать эту формулу, рассмотрим плоскости, которые проходят через точки  и
и  перпендикулярно координатным осям. Получаем, что отрезок
перпендикулярно координатным осям. Получаем, что отрезок  по сути является диагональю прямоугольного параллелепипеда, рёбра которого параллельны координатным осям и имеют длины
по сути является диагональю прямоугольного параллелепипеда, рёбра которого параллельны координатным осям и имеют длины 
и  (рис. 334) (если же какие-либо из проведённых плоскостей совпадут, то параллелепипед превратится в прямоугольник или отрезок).
(рис. 334) (если же какие-либо из проведённых плоскостей совпадут, то параллелепипед превратится в прямоугольник или отрезок).
Ранее вы доказывали, что координаты середины отрезка равны средним арифметическим соответствующих координат его концов. Это утверждение остаётся истинным и в случае пространства (см. пример 2 в § 6): если  и точка
и точка  — середина отрезка
— середина отрезка  то
то

Пример:
На оси ординат найдём точку, равноудалённую от точек 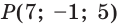 и
и 
Решение:
Пусть  — искомая точка. Тогда
— искомая точка. Тогда 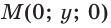 и, поскольку
и, поскольку  то
то

или  Отсюда
Отсюда 
Ответ: 
Пример:
Найдём условие, задающее геометрическое место точек, равноудалённых от начала координат и от точки 
Решение:
Согласно геометрическим соображениям искомое множество состоит из всех тех точек, размещённых на серединных перпендикулярах к отрезку  Такие точки заполняют плоскость, проходящую через середину отрезка
Такие точки заполняют плоскость, проходящую через середину отрезка  перпендикулярно ему. Найдём условие, которому удовлетворяют координаты
перпендикулярно ему. Найдём условие, которому удовлетворяют координаты  произвольной точки
произвольной точки  этой плоскости. Условие
этой плоскости. Условие  означает, что
означает, что

Ответ: Искомое геометрическое место точек есть плоскость, которая задаётся уравнением 
Пример:
Найдём условие, которому удовлетворяют координаты точек плоскости  проходящей через точку
проходящей через точку  перпендикулярно прямой
перпендикулярно прямой  где
где 
Решение:
Пусть  — произвольная точка плоскости
— произвольная точка плоскости  Тогда из прямоугольного треугольника
Тогда из прямоугольного треугольника  по теореме Пифагора имеем:
по теореме Пифагора имеем: 
Поскольку

 то
то
 или
или

Ответ: 
Вектор. Действия над векторами
А) С векторами вы встречались в курсе физики девятого класса, когда знакомились с векторными величинами. Физическая величина является векторной, если она характеризуется не только числовым значением, но и направлением. Такие величины, как сила, скорость и другие, обозначают направленными отрезками. Длина направленного отрезка (стрелки) характеризует числовое значение векторной величины (её модуль).
Особенностью понятия вектор является то, что все основные определения и свойства, связанные с этим понятием, формулируются почти одинаково как в планиметрии, так и в стереометрии.
Вектор в геометрии представляется направленным отрезком (рис. 336), начало которого считается началом вектора, а конец — концом вектора.
Расстояние между началом направленного отрезка и его концом считается длиной вектора.
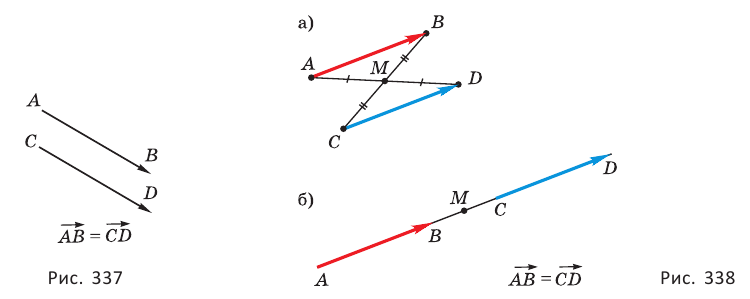
Направленные отрезки  и
и  представляют один вектор, если они одинаково направлены и имеют одинаковую длину (рис. 337). В таком случае говорят, что векторы
представляют один вектор, если они одинаково направлены и имеют одинаковую длину (рис. 337). В таком случае говорят, что векторы  и
и  равны, и пишут
равны, и пишут  Векторы
Векторы  и
и  равны тогда и только тогда, когда совпадают середины отрезков
равны тогда и только тогда, когда совпадают середины отрезков  и
и  (рис. 338).
(рис. 338).
Это напоминает ситуацию с дробями: определённое число может представляться разными дробями, например, дроби  представляют одно и то же число. Дроби
представляют одно и то же число. Дроби  и
и  равны тогда и только тогда, когда
равны тогда и только тогда, когда 
Если вектор  изображается направленным отрезком
изображается направленным отрезком  то говорят, что этот вектор отложен от точки
то говорят, что этот вектор отложен от точки  Вектор можно, и при этом однозначно, отложить от любой точки.
Вектор можно, и при этом однозначно, отложить от любой точки.
Вектор, представленный направленным отрезком  называют нулевым:
называют нулевым:  Векторы, представленные направленными отрезками
Векторы, представленные направленными отрезками  и
и  называют противоположными и пишут
называют противоположными и пишут 
Если ненулевые векторы  и
и  отложены от одной точки:
отложены от одной точки: 
 то угол
то угол  называется углом между векторами и
называется углом между векторами и  .
.
Ненулевые векторы  и
и  называют коллинеарными, если прямые
называют коллинеарными, если прямые  и
и  параллельны или совпадают. Нулевой вектор считают кол-линеарным с любым вектором.
параллельны или совпадают. Нулевой вектор считают кол-линеарным с любым вектором.
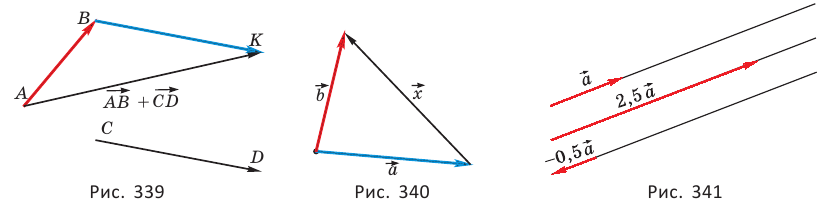
Векторы можно складывать и умножать на число. Чтобы сложить векторы  и
и  можно один из них заменить таким равным ему вектором, чтобы конец первого направленного отрезка совпадал с началом второго:
можно один из них заменить таким равным ему вектором, чтобы конец первого направленного отрезка совпадал с началом второго:

и тогда сумма векторов представляется направленным отрезком  (рис. 339).
(рис. 339).
Сложение векторов имеет переместительное свойство, т. е.  сочетательное свойство, т. е.
сочетательное свойство, т. е.  кроме того, уравнение
кроме того, уравнение  всегда имеет единственное решение, которое называют разностью векторов
всегда имеет единственное решение, которое называют разностью векторов  и
и  (рис. 340).
(рис. 340).
Произведением вектора  на число
на число  является такой вектор
является такой вектор  что, во-первых, векторы
что, во-первых, векторы  и
и  одинаково направлены при
одинаково направлены при  и противоположно направлены при
и противоположно направлены при  и, во-вторых, длины векторов
и, во-вторых, длины векторов  и
и  связаны равенством
связаны равенством  (рис. 341). Векторы
(рис. 341). Векторы  и
и  являются коллинеарными. При этом верно равенство
являются коллинеарными. При этом верно равенство  Если
Если  то произведением
то произведением  является нулевой вектор.
является нулевой вектор.
С действием умножения вектора на число связываются два распределительных свойства—  и
и 
Б) Если векторы  и
и  коллинеарны, то один из них можно выразить через другой: либо
коллинеарны, то один из них можно выразить через другой: либо либо
либо  при определённых числах
при определённых числах  и
и 
Для любых двух векторов существует плоскость, которой они параллельны. Векторы, параллельные одной плоскости, называют компланарными. Если векторы  и
и  неколлинеарны, то любой вектор
неколлинеарны, то любой вектор  компланарный с ними, можно однозначно выразить через векторы и :
компланарный с ними, можно однозначно выразить через векторы и :  (рис. 342).
(рис. 342).
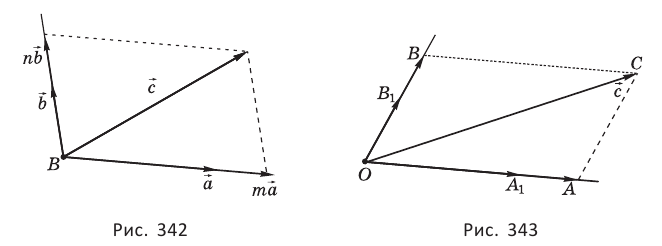
Истинно и обратное утверждение: если векторы  и
и  связаны равенством
связаны равенством 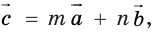 то они компланарны.
то они компланарны.
Действительно, если векторы  и
и  представить направленными отрезками с общим началом
представить направленными отрезками с общим началом  (рис. 343), то
(рис. 343), то  поэтому точки
поэтому точки  и
и  находятся в плоскости
находятся в плоскости 
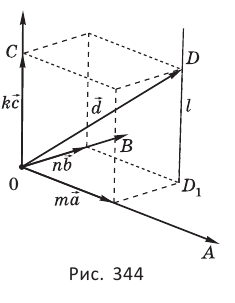
Теорема 1. Если векторы  и
и  некомпланарны, то для любого вектора
некомпланарны, то для любого вектора  существует такая единственная упорядоченная тройка действительных чисел
существует такая единственная упорядоченная тройка действительных чисел  что
что 
Доказательство: Сначала докажем существование нужных чисел. Представим векторы  и
и  направленными отрезками с общим началом
направленными отрезками с общим началом  Через точку
Через точку  проведём прямую
проведём прямую  параллельно
параллельно  и пусть
и пусть  — точка пересечения прямой
— точка пересечения прямой  с плоскостью
с плоскостью  (рис. 344). Тогда
(рис. 344). Тогда  Поскольку вектор
Поскольку вектор  ненулевой и векторы
ненулевой и векторы  и
и  коллинеарны, то существует такое число
коллинеарны, то существует такое число  что
что  А поскольку векторы
А поскольку векторы  и
и  компланарны, а векторы
компланарны, а векторы  и
и  неколлинеарны, то существуют такие числа
неколлинеарны, то существуют такие числа  и
и  что
что 
Поэтому

Теперь докажем единственность представления. Допустим, что существуют две разные упорядоченные тройки чисел  и
и  при которых
при которых  и
и  Тогда
Тогда  и
и 
Поскольку тройки чисел  и
и  различны, то числа на соответствующих местах не могут все совпадать. Пусть, например,
различны, то числа на соответствующих местах не могут все совпадать. Пусть, например,  В этом случае из последнего равенства можно выразить вектор
В этом случае из последнего равенства можно выразить вектор  Последнее равенство означает, что векторы
Последнее равенство означает, что векторы  и
и  компланарны. Полученное противоречие с условием означает, что сделанное допущение о существовании двух разных троек чисел неверно.
компланарны. Полученное противоречие с условием означает, что сделанное допущение о существовании двух разных троек чисел неверно.
Следствие 1. Из четырёх любых векторов пространства один может быть выражен через три других.
Действительно, если среди данных четырёх векторов пространства есть три некомпланарных, то четвёртый вектор можно через эти три выразить. Далее, если среди данных четырёх векторов пространства любые три компланарны, то может найтись среди них два неколлинеарных, или любых два вектора коллинеарны. В первом случае через эти два неколлинеарных вектора можно выразить третий и к полученному выражению прибавить четвёртый, умноженный на ноль. Во втором случае один из векторов можно выразить через другой и потом прибавить к этому выражению два оставшихся вектора, умноженных на ноль.
Таким образом, теперь вы знаете, что из двух коллинеарных векторов один может быть выражен через другой, из трёх компланарных векторов один может быть выражен через два других, а из четырёх любых векторов один может быть выражен через три других.
Пример №1
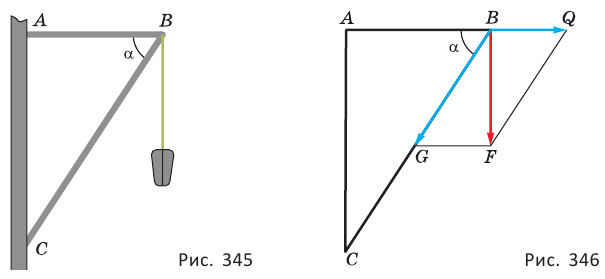
На кронштейне, состоящем из подкоса  и растяжки
и растяжки  подвешен груз. Кронштейн прикреплён к вертикальной стене
подвешен груз. Кронштейн прикреплён к вертикальной стене  растяжка занимает горизонтальное положение (рис. 345). Найдём силы, действующие на подкос и растяжку, если угол между ними равен
растяжка занимает горизонтальное положение (рис. 345). Найдём силы, действующие на подкос и растяжку, если угол между ними равен  a масса груза равна
a масса груза равна 
Решение:
Сила тяжести выражается вектором  направленным вниз по вертикали. Выразим его суммой векторов, которые коллинеарны векторам
направленным вниз по вертикали. Выразим его суммой векторов, которые коллинеарны векторам  и
и  Для этого построим параллелограмм
Для этого построим параллелограмм  с диагональю
с диагональю  стороны которого расположены на прямых
стороны которого расположены на прямых  и
и  (рис. 346).
(рис. 346).
Поскольку углы  и
и  являются внутренними накрест лежащими при параллельных прямых
являются внутренними накрест лежащими при параллельных прямых  и
и  и секущей
и секущей  то в прямоугольном треугольнике
то в прямоугольном треугольнике  угол
угол  равен
равен  и катет
и катет  равен
равен  Поэтому
Поэтому
 и
и 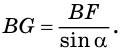
Ответ. Под воздействием груза подкос сжимается с силой  а растяжка растягивается с силой
а растяжка растягивается с силой 
Пример №2
В правильной четырёхугольной пирамиде  точки
точки  и
и  — середины рёбер
— середины рёбер  и
и  соответственно. Плоскость, проходящая через точки
соответственно. Плоскость, проходящая через точки  и
и  параллельно прямой
параллельно прямой  пересекает прямую
пересекает прямую  в точке
в точке  (рис. 347). Найдём отношение
(рис. 347). Найдём отношение 
Решение:
Поскольку  то векторы
то векторы  и
и  полностью определяют пирамиду. Поскольку векторы
полностью определяют пирамиду. Поскольку векторы  и
и  коллинеарны, то вектор
коллинеарны, то вектор  можно выразить через
можно выразить через  при определённом числе
при определённом числе  Вектор
Вектор  можно выразить через векторы
можно выразить через векторы  и
и  используя то, что точка
используя то, что точка  находится в плоскости, проходящей через точки
находится в плоскости, проходящей через точки  и
и  параллельно прямой
параллельно прямой  Вектор
Вектор  компланарен с векторами
компланарен с векторами  и
и  поэтому
поэтому  при определённых множителях
при определённых множителях  и
и  Выразим векторы
Выразим векторы  и
и  через векторы
через векторы  и
и 
Имеем:

Поэтому

Учтём теперь то, что через некомпланарные векторы  и
и  каждый вектор пространства, в том числе и вектор
каждый вектор пространства, в том числе и вектор  выражается единственным образом. Поэтому должны одновременно выполняться условия:
выражается единственным образом. Поэтому должны одновременно выполняться условия: 
 Отсюда получаем, что
Отсюда получаем, что  А поскольку
А поскольку  то
то 
В) Пусть в пространстве выбрана декартова система координат  С каждой точкой
С каждой точкой  пространства можно связать вектор
пространства можно связать вектор  Это соответствие между точками пространства и векторами является взаимно однозначным: различным точкам соответствуют различные векторы с началом
Это соответствие между точками пространства и векторами является взаимно однозначным: различным точкам соответствуют различные векторы с началом  и концами в этих точках, и различным векторам соответствуют различные точки пространства.
и концами в этих точках, и различным векторам соответствуют различные точки пространства.
Будем говорить, что вектор  имеет координаты
имеет координаты  в декартовой системе координат
в декартовой системе координат  если
если  и точка
и точка  имеет координаты
имеет координаты  Это будем записывать:
Это будем записывать: 
Теорема 2. Если  то
то 
Доказательство: Пусть задана декартова система координат  и
и  Пусть также
Пусть также  и
и  Нужно доказать, что
Нужно доказать, что  и
и 
Поскольку  то середины отрезков
то середины отрезков  и
и  совпадают.
совпадают.
Середина отрезка  имеет координаты
имеет координаты  а середина отрезка
а середина отрезка  — координаты
— координаты  Получаем:
Получаем:

Отсюда:
 и
и 
Теорема 3. Если  то
то

Доказательство: Пусть задана декартова система координат  и
и  (рис. 348). Поскольку
(рис. 348). Поскольку
 то
то  По теореме 2 получаем:
По теореме 2 получаем:
 и
и 
Поэтому
 и
и 
Значит, вектор  имеет координаты
имеет координаты 
Докажем второе утверждение теоремы 3. Пусть сначала  и
и  Сравним одноимённые, например первые, координаты векторов
Сравним одноимённые, например первые, координаты векторов  и
и  Для этого через точки
Для этого через точки  и
и  проведём плоскости, параллельные плоскости
проведём плоскости, параллельные плоскости  (рис. 349), которые пересекают ось
(рис. 349), которые пересекают ось  в точках
в точках  и
и  Из подобия треугольников
Из подобия треугольников  и
и  следует, что
следует, что  Аналогично получается, что
Аналогично получается, что  и
и 
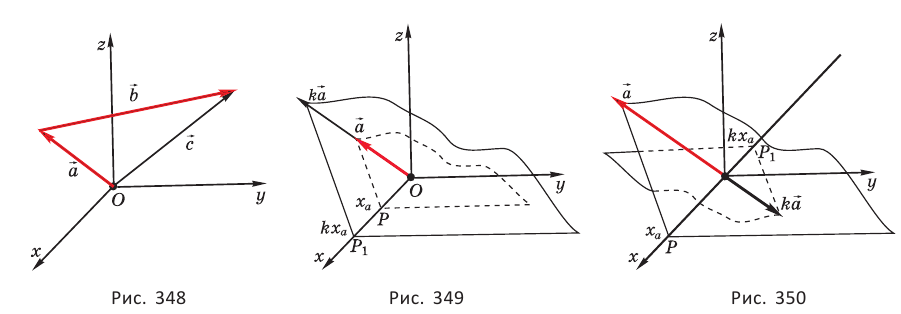
Если же  то аналогичные рассуждения проводятся для рисунка 350. Векторы
то аналогичные рассуждения проводятся для рисунка 350. Векторы  называют единичными координатными векторами.
называют единичными координатными векторами.
Следствие 2. Если  то
то 
Пример №3
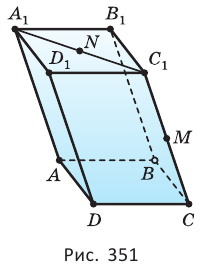
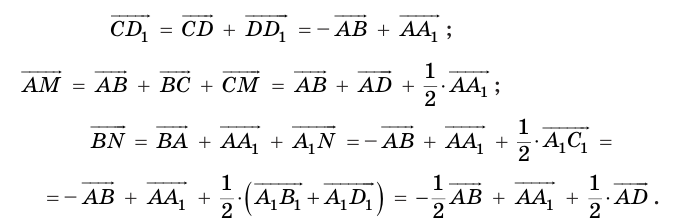
Дан параллелепипед  Точки
Точки  и
и  — середины отрезков
— середины отрезков  и
и  соответственно (рис. 351). Выразим:
соответственно (рис. 351). Выразим:
а) векторы  и
и  через векторы
через векторы  и
и 
б) векторы  и
и  через векторы
через векторы  и
и 
Решение:
а) Имеем:
б) Будем рассматривать полученные равенства – 
 как систему условий, из которой нужно найти
как систему условий, из которой нужно найти  и
и  Из первого условия выразим
Из первого условия выразим
 и исключим
и исключим  из двух других:
из двух других:

Теперь из последнего равенства выразим  и исключим
и исключим  из предыдущего:
из предыдущего:

Далее можно последовательно выразить  и
и  через векторы
через векторы
 и
и

Пример №4
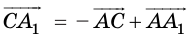
Через диагональ  грани треугольной призмы
грани треугольной призмы  проведена плоскость так, что она пересекает диагонали
проведена плоскость так, что она пересекает диагонали  и
и  граней в точках
граней в точках  и
и  соответственно (рис. 352). Найдём отношение
соответственно (рис. 352). Найдём отношение  учитывая, что
учитывая, что 
Решение:
Векторы  и
и  некомпланарны, поэтому через них можно выразить векторы
некомпланарны, поэтому через них можно выразить векторы  и
и 

Учтём, что  и
и  коллинеарны. Значит, существует такое число
коллинеарны. Значит, существует такое число  что
что 
Аналогично, существует такое число  что
что  Кроме того,
Кроме того,
 и
и 
Значит,

Из условия следует, что векторы  и
и  коллинеарны. Поэтому
коллинеарны. Поэтому  при определённом
при определённом 
Поскольку  и учитывая однозначность разложения вектора по трём некомпланарным векторам, получаем, что
и учитывая однозначность разложения вектора по трём некомпланарным векторам, получаем, что  Отсюда находим
Отсюда находим 
Ответ: 
Скалярное произведение векторов
А) Скалярным произведением векторов  и
и  называется число
называется число  , равное произведению длин этих векторов на косинус угла
, равное произведению длин этих векторов на косинус угла  между ними:
между ними:

Скалярное произведение векторов имеет переместительное свойство  распределительное свойство
распределительное свойство  кроме того, множитель можно выносить за знак скалярного произведения
кроме того, множитель можно выносить за знак скалярного произведения  С помощью скалярного произведения можно находить длины векторов и косинусы углов между ними:
С помощью скалярного произведения можно находить длины векторов и косинусы углов между ними: 
У нулевого вектора направление не определено, поэтому удобно считать, что нулевой вектор перпендикулярен любому другому вектору.
С учётом этого получается следующее полезное утверждение: два вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю.
Теорема 1. Скалярное произведение векторов  и
и  выражается через их координаты в декартовой системе
выражается через их координаты в декартовой системе
равенством 
Доказательство: Поскольку  то
то
Находим далее:

Аналогично,

Поэтому 
Пример №5
Найдём длину вектора 
Имеем:  Поэтому
Поэтому 
Пример №6
Найдём угол  между векторами
между векторами  и
и 
Имеем: 
Поэтому:
Пример №7
Найдём длину вектора  равного
равного  учитывая, что векторы
учитывая, что векторы  и
и  перпендикулярны вектору
перпендикулярны вектору  а между собой образуют угол 60° и
а между собой образуют угол 60° и 
Имеем:

Поскольку

Поэтому 
Б) Вы знаете, что плоскость в пространстве можно задать тремя точками, не лежащими на одной прямой. Поскольку существует единственная плоскость, проходящая через данную точку перпендикулярно данной прямой, то плоскость можно задавать указанием одной из её точек и вектора, ей перпендикулярного.
Теорема 2. Если плоскость проходит через точку  перпендикулярно ненулевому вектору
перпендикулярно ненулевому вектору  то координаты
то координаты  любой точки
любой точки  этой плоскости удовлетворяют уравнению
этой плоскости удовлетворяют уравнению 
Доказательство: Если  — произвольная точка плоскости,
— произвольная точка плоскости,
проходящей через точку  перпендикулярно вектору
перпендикулярно вектору 
то векторы  и
и  перпендикулярны, а потому их скалярное произведение равно нулю:
перпендикулярны, а потому их скалярное произведение равно нулю:

Истинно и обратное утверждение.
Теорема 3. Уравнению  в котором коэффициенты
в котором коэффициенты  не равны нулю одновременно, удовлетворяет любая точка некоторой плоскости. Этой плоскости перпендикулярен вектор
не равны нулю одновременно, удовлетворяет любая точка некоторой плоскости. Этой плоскости перпендикулярен вектор 
Доказательство: Если есть уравнение  и числа
и числа 
 не равны нулю одновременно, то можно найти упорядоченную тройку чисел
не равны нулю одновременно, то можно найти упорядоченную тройку чисел  удовлетворяющую этому уравнению. Например, если
удовлетворяющую этому уравнению. Например, если  то можно, взяв
то можно, взяв  и
и  найти значение переменной
найти значение переменной  так, чтобы тройка чисел
так, чтобы тройка чисел  удовлетворяла уравнению
удовлетворяла уравнению 
Поскольку  то условия
то условия  и
и  равносильны. Получили, что исходное уравнение равносильно уравнению
равносильны. Получили, что исходное уравнение равносильно уравнению  которому удовлетворяют координаты
которому удовлетворяют координаты  любой точки
любой точки  расположенной на прямой, проходящей через точку
расположенной на прямой, проходящей через точку  перпендикулярно вектору
перпендикулярно вектору  т. е. любой точки плоскости, проходящей через точку
т. е. любой точки плоскости, проходящей через точку  перпендикулярно вектору
перпендикулярно вектору 
Пример №8
Найдём уравнение плоскости, проходящей через точки А(2; 1; 3), В(4; 1, 2) и С(5; 2; 1).
Решение:
Найдём координаты векторов  и
и  Поскольку координаты (2; 0; -1) и (3; 1; -2) этих векторов не пропорциональны, то сами векторы не коллинеарны, и, значит, точки
Поскольку координаты (2; 0; -1) и (3; 1; -2) этих векторов не пропорциональны, то сами векторы не коллинеарны, и, значит, точки  и
и  не лежат на одной прямой, они задают единственную плоскость.
не лежат на одной прямой, они задают единственную плоскость.
Чтобы записать уравнение плоскости  используя теорему 2, найдём вектор
используя теорему 2, найдём вектор  перпендикулярный этой плоскости. Поскольку
перпендикулярный этой плоскости. Поскольку  и
и  то
то  и
и  Из этих условий получаем:
Из этих условий получаем:  Таким образом, в качестве искомого вектора можно взять вектор с координатами (1; 1; 2).
Таким образом, в качестве искомого вектора можно взять вектор с координатами (1; 1; 2).
Теперь можно записать уравнение плоскости, которая проходит через точку перпендикулярно найденному вектору
перпендикулярно найденному вектору 
 или
или 
В) Теорема 4. Если плоскость имеет уравнение  то расстояние до неё от точки
то расстояние до неё от точки  равно
равно 
Доказательство: Пусть из точки  на данную плоскость опущен перпендикуляр
на данную плоскость опущен перпендикуляр  основание которого — точка
основание которого — точка  — имеет координаты
— имеет координаты
 Тогда вектор
Тогда вектор  коллинеарен с
коллинеарен с
вектором  Поскольку угол между этими векторами равен 0°
Поскольку угол между этими векторами равен 0°
или 180°, то  откуда
откуда

Находим

поскольку координаты точки  удовлетворяют уравнению плоскости. Далее:
удовлетворяют уравнению плоскости. Далее:  А поскольку искомое расстояние равно длине вектора
А поскольку искомое расстояние равно длине вектора  то требуемое утверждение обосновано.
то требуемое утверждение обосновано.
Пример №9
Найдём расстояние от точки  до плоскости, заданной уравнением
до плоскости, заданной уравнением 
Решение:
Используя теорему 4, получаем:
Ответ: 5.
Применение векторов и координат
А) В ряде задач условие содержит сведения о параллельности некоторых прямых или об их точках пересечения, об отношениях длин параллельных отрезков. Для решения таких задач может быть полезным применение векторов, как это было при решении примера 3 из параграфа 12. При решении таких задач достаточно использовать действия сложения векторов и умножения вектора на число. Рассмотрим ещё один пример.
Пример №10
Пусть  и
и  — параллелограммы в пространстве,
— параллелограммы в пространстве,  — середины отрезков
— середины отрезков  соответственно. Докажем, что середины отрезков
соответственно. Докажем, что середины отрезков  и
и  совпадают.
совпадают.
Решение. Выберем в пространстве точку  Тогда положение каждой точки полностью характеризуется соответствующим вектором. Из условия
Тогда положение каждой точки полностью характеризуется соответствующим вектором. Из условия
следует, что  и
и  Точки
Точки  определяются
определяются
векторами 

Чтобы доказать, что середины отрезков  и
и  совпадают, докажем, что
совпадают, докажем, что 
Находим: 

А поскольку
 и
и 
то выражения в двух последних скобках принимают одинаковые значения. Требуемое утверждение доказано.
Б) При решении других задач целесообразно пользоваться скалярным умножением векторов. Такими являются задачи, в которых нужно использовать или определять некоторые расстояния или углы.
Пример №11
Найдём угол между скрещивающимися диагоналями соседних боковых граней правильной шестиугольной призмы, у которой боковые грани — квадраты.
Решение:
Пусть нужно найти угол между прямыми  и
и  (рис. 370). Искомый угол может совпадать с углом между векторами, параллельными данным прямым, или дополнять его до 180°. Поэтому косинус искомого угла совпадает с модулем косинуса угла между векторами
(рис. 370). Искомый угол может совпадать с углом между векторами, параллельными данным прямым, или дополнять его до 180°. Поэтому косинус искомого угла совпадает с модулем косинуса угла между векторами  и
и 
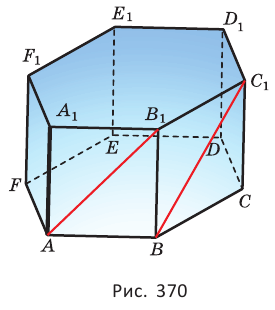
Выразим векторы  и
и  через некомпланарные векторы
через некомпланарные векторы  и
и  Примем длину ребра призмы за а и найдём скалярное произведение векторов:
Примем длину ребра призмы за а и найдём скалярное произведение векторов:

А поскольку
 то
то
Ответ: 
Скалярное произведение векторов можно использовать и для нахождения угла между плоскостями. Как и при определении угла между прямыми, так и при определении угла  между плоскостями можно использовать векторы
между плоскостями можно использовать векторы  и
и  только перпендикулярные рассматриваемым плоскостям:
только перпендикулярные рассматриваемым плоскостям:
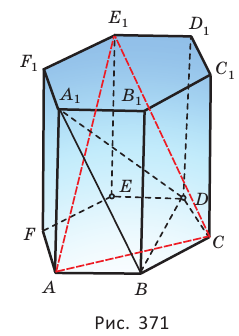
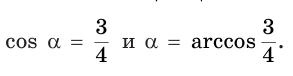
Пример №12
У правильной шестиугольной призмы  все рёбра имеют длину 1 (рис. 371). Найдём угол между плоскостями
все рёбра имеют длину 1 (рис. 371). Найдём угол между плоскостями  и
и 
Решение:
Для получения ответа нужно определить векторы  и
и  перпендикулярные плоскостям
перпендикулярные плоскостям  и
и  соответственно. Они должны удовлетворять условиям
соответственно. Они должны удовлетворять условиям  и
и 
Используем прямоугольную декартову систему координат, начало которой находится в центре  основания
основания  и точки
и точки  и
и  имеют координаты
имеют координаты  и
и  соответственно. Тогда точки
соответственно. Тогда точки  и
и  будут иметь координаты
будут иметь координаты  и
и  соответственно. Найдём координаты векторов
соответственно. Найдём координаты векторов  и
и  по координатам их концевых точек:
по координатам их концевых точек:

Поскольку  то координаты
то координаты  вектора
вектора 
удовлетворяют условиям  и
и  Этим условиям удовлетворяют числа
Этим условиям удовлетворяют числа  Поэтому в качестве вектора, перпендикулярного плоскости
Поэтому в качестве вектора, перпендикулярного плоскости  можно взять вектор
можно взять вектор 
Для нахождения вектора  действовать будем аналогично. Координаты
действовать будем аналогично. Координаты  вектора
вектора  перпендикулярного плоскости
перпендикулярного плоскости  удовлетворяют условиям
удовлетворяют условиям  и
и  удовлетворяют числа
удовлетворяют числа  Поэтому
Поэтому 
Используем равенство  Поскольку угол
Поскольку угол  между векторами
между векторами  и
и  или совпадает с углом
или совпадает с углом  между плоскостями
между плоскостями  и
и
 или дополняет его до 180°, то
или дополняет его до 180°, то 
Находим:


Ответ: 
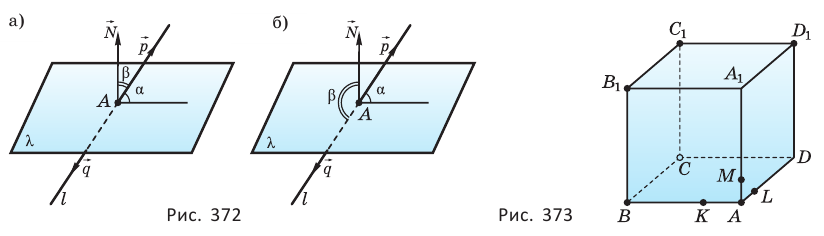
Для нахождения угла между прямой и плоскостью также можно использовать векторы, из которых один параллелен прямой, а другой перпендикулярен плоскости. Угол  между этими векторами связан с углом
между этими векторами связан с углом  между прямой и плоскостью равенством
между прямой и плоскостью равенством  (рис. 372).
(рис. 372).
Пример №13
На рёбрах  и
и  куба
куба  отмечены точки
отмечены точки  и
и  так, что
так, что  (рис. 373). Найдём угол
(рис. 373). Найдём угол  между прямой
между прямой  и плоскостью
и плоскостью 
Решение:
Примем точку  за начало системы координат, координатные оси направим по рёбрам куба, взяв рёбра за единичные отрезки. Тогда определятся координаты нужных точек:
за начало системы координат, координатные оси направим по рёбрам куба, взяв рёбра за единичные отрезки. Тогда определятся координаты нужных точек: 
 и
и 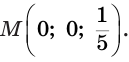
По теореме 3 из параграфа 13 уравнение плоскости  имеет вид
имеет вид  а поскольку координаты точек
а поскольку координаты точек  и
и  удовлетворяют уравнению
удовлетворяют уравнению  то это уравнение и есть уравнение плоскости
то это уравнение и есть уравнение плоскости  а вектор
а вектор 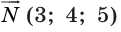 этой плоскости перпендикулярен.
этой плоскости перпендикулярен.
Прямой  параллелен вектор
параллелен вектор  Находим:
Находим:


и 
Ответ: 
В) В предыдущем параграфе обсуждалось использование координат для вычисления расстояния от точки до прямой. Рассмотрим решение ещё двух задач на нахождение расстояний: от точки до прямой и расстояния между скрещивающимися прямыми.
Пример №14
В правильной шестиугольной пирамиде  все рёбра основания имеют длину 3, они вдвое короче боковых рёбер. На рёбрах
все рёбра основания имеют длину 3, они вдвое короче боковых рёбер. На рёбрах  и
и  отмечены точки
отмечены точки  и
и  так, что
так, что 
 Найдём расстояние
Найдём расстояние  от точки
от точки  до прямой
до прямой 
Решение:
Пусть  — центр основания
— центр основания  Поскольку
Поскольку 
 и
и  то из прямоугольного треугольника
то из прямоугольного треугольника  находим:
находим:

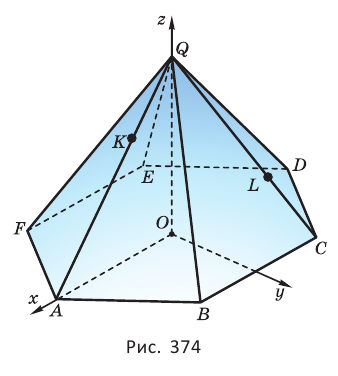
Используем прямоугольную декартову систему координат, начало которой находится в центре  основания
основания  оси абсцисс и аппликат проходят через точки
оси абсцисс и аппликат проходят через точки  и
и  соответственно и точка
соответственно и точка  имеет неотрицательные координаты (рис. 374). Точки
имеет неотрицательные координаты (рис. 374). Точки  и
и  имеют координаты
имеют координаты 
 и
и  . Тогда точки
. Тогда точки  и
и  будут иметь координаты
будут иметь координаты
 и
и  соответственно. Найдем координаты векторов
соответственно. Найдем координаты векторов  и
и  по координатам их концевых точек:
по координатам их концевых точек:

Искомое расстояние есть длина перпендикуляра, опущенного из точки  на прямую
на прямую  и равна высоте треугольника
и равна высоте треугольника  проведённой из точки
проведённой из точки  Для её нахождения можно использовать формулу
Для её нахождения можно использовать формулу  Поскольку
Поскольку 
 и
и 
то

Теперь находим:
Ответ: 
Пример №15
Измерения  и
и  прямоугольного параллелепипеда
прямоугольного параллелепипеда  равны соответственно 5, 4 и 4. Точки
равны соответственно 5, 4 и 4. Точки  и
и  на рёбрах
на рёбрах  и
и  выбраны так, что
выбраны так, что  (рис. 375). Найдём расстояние
(рис. 375). Найдём расстояние  между прямыми
между прямыми  и
и 
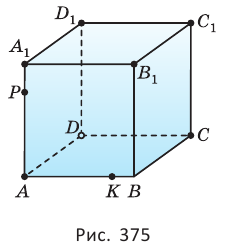
Решение:
Расстояние между скрещивающимися прямыми  и
и  можно найти как расстояние от какой-либо точки прямой
можно найти как расстояние от какой-либо точки прямой  до плоскости
до плоскости  проходящей через прямую
проходящей через прямую  параллельно
параллельно 
Примем точку  за начало системы координат, координатные оси направим по рёбрам параллелепипеда так, чтобы точки
за начало системы координат, координатные оси направим по рёбрам параллелепипеда так, чтобы точки  и
и  имели координаты
имели координаты  соответственно. Тогда
соответственно. Тогда 
 Чтобы записать уравнение плоскости
Чтобы записать уравнение плоскости  найдём координаты вектора
найдём координаты вектора  перпендикулярного как вектору
перпендикулярного как вектору  так и вектору
так и вектору  Поскольку
Поскольку 
 то координаты
то координаты  вектора
вектора  должны удовлетворять равенствам
должны удовлетворять равенствам  и
и  например
например 
Теперь запишем уравнение плоскости  используя координаты точки
используя координаты точки 
 Для нахождения расстояния
Для нахождения расстояния  используем теорему 4 из параграфа 13:
используем теорему 4 из параграфа 13:
Ответ: 
Векторы в пространстве
Это интересно!
Основоположниками аналитической геометрии являются знаменитые ученые Декарт и Ферма. Однако Декарт свои исследования опубликовал первым. А исследования Ферма увидели свет намного позже, после его смерти. Интересно, что подойдя к проблеме с разных сторон, они пришли к одинаковым выводам. Декарт искал уравнение исследуемой кривой, а Ферма для заданного уравнения искал соответствующую кривую.
Применение правил алгебры к геометрии привело к возникновению аналитической геометрии. В последствии аналитическая геометрия была усовершенствована основателем математического анализа Исааком Ньютоном, который писал ” … я смог пойти дальше Декарта, только потому, что стоял на плечах гигантов”
Прямоугольная система координат в пространстве
Пусть мяч ударился о пол и отскочил вертикально вверх. Координаты мяча в точке на полу можно определить относительно длины и ширины комнаты двумя значениями. Однако когда мяч отскочил от пола, то его положение уже невозможно определить двумя координатами. Если положение мяча на полу определяется как  то после поднятия на высоту 2,5 м его положение в пространстве задается уже гремя координатами
то после поднятия на высоту 2,5 м его положение в пространстве задается уже гремя координатами 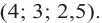
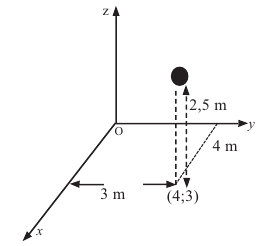
Прямоугольная система координат в пространстве. В пространстве возьмем произвольную точку  и проведем через нее три попарно перпендикулярные прямые линии. Примем точку
и проведем через нее три попарно перпендикулярные прямые линии. Примем точку  за начало координат и, выбрав на этих прямых положительное направление и единичный отрезок, назовем эти прямые координатными осями
за начало координат и, выбрав на этих прямых положительное направление и единичный отрезок, назовем эти прямые координатными осями  Начало координат
Начало координат  делит каждую ось на две полуоси (положительную и отрицательную). Пересекаясь попарно, три координатные оси образуют координатные плоскости. Плоскость
делит каждую ось на две полуоси (положительную и отрицательную). Пересекаясь попарно, три координатные оси образуют координатные плоскости. Плоскость  берется но горизонтали, положительное направление оси
берется но горизонтали, положительное направление оси  проводится по направлению вверх. Трехмерная система координат, образованная по данному правилу, называется еще системой правой руки. Если согнуть пальцы правой руки от положительного направления оси
проводится по направлению вверх. Трехмерная система координат, образованная по данному правилу, называется еще системой правой руки. Если согнуть пальцы правой руки от положительного направления оси  вдоль положительного направления оси
вдоль положительного направления оси  то большой палец будет направлен вдоль положительного направления оси
то большой палец будет направлен вдоль положительного направления оси 
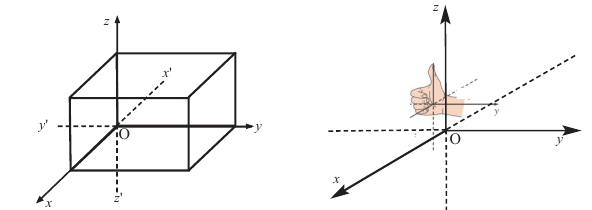
 начало координат
начало координат координатные оси
координатные оси координатные плоскости
координатные плоскости
Координатные плоскости обозначаются как и 
Каждая координатная плоскость делит пространство на два полупространства и, таким образом, три координатные плоскости вместе делят пространство на восемь частей, каждая из которых называется октантом:

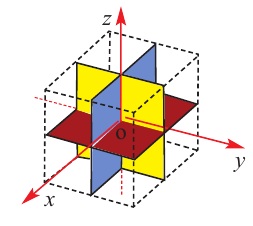
Пусть точка  произвольная точка в пространстве. Параллельно плоскостям
произвольная точка в пространстве. Параллельно плоскостям 
 и
и  через точку
через точку  проведем плоскости, которые пересекают соответствующие координатные оси в точках
проведем плоскости, которые пересекают соответствующие координатные оси в точках  и
и  Получим три плоскости:
Получим три плоскости:
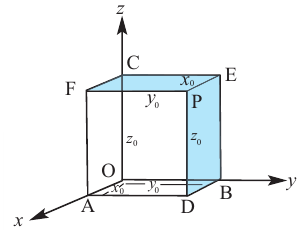
Координаты точки в пространстве
1) Плоскость, проходящая через точку  и параллельная плоскости
и параллельная плоскости  пересекает ось
пересекает ось  в точке
в точке 
2) Плоскость, проходящая через точку и параллельная плоскости  пересекает ось
пересекает ось  в точке
в точке 
3) Плоскость, проходящая через точку и параллельная плоскости  пересекает ось
пересекает ось  в точке
в точке 
Значит, каждой точке пространства соответствует упорядоченная тройка  и наоборот:
и наоборот: 
Упорядоченная тройка  в прямоугольной системе координат
в прямоугольной системе координат  называется координатами точки и декартовыми координатами. Расстояние от точки до плоскостей
называется координатами точки и декартовыми координатами. Расстояние от точки до плоскостей  и
и  соответствует абсолютным значениям координат
соответствует абсолютным значениям координат  Числа
Числа  соответственно называются абсциссой, ординатой и аппликатой точки и это записывается так:
соответственно называются абсциссой, ординатой и аппликатой точки и это записывается так: 
1) Начало координат: 
2) Точка, расположенная на оси 
Точка, расположенная на оси 
Точка, расположенная на оси 
3) Точка, расположенная на плоскости 
Точка, расположенная на плоскости 
Точка, расположенная на плоскости 
Точка  в пространстве расположена в I октанте, точка
в пространстве расположена в I октанте, точка  расположена на отрицательной полуоси
расположена на отрицательной полуоси  точка
точка  расположена на плоскости
расположена на плоскости  точка
точка  расположена в III октанте.
расположена в III октанте.
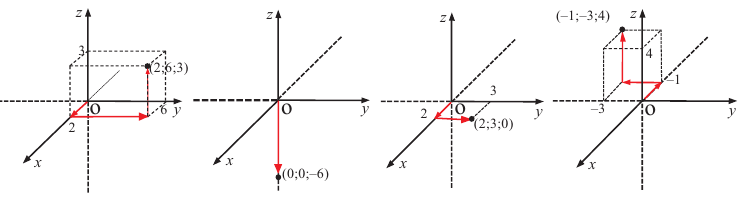
Знаки координат точки
Знак координаты точки зависит от того, в каком октанте расположена точка. В следующей таблице показаны знаки координат точек в различных октантах.
В первом октанте все знаки координат положительны, в седьмом октанте все знаки отрицательны.
Пример №16
В прямоугольной системе координат в пространстве постройте точки: 
Решение: а) для построения точки  от начала координат но оси
от начала координат но оси  в положительном направлении на расстоянии 2-х единичных отрезков отметим точку
в положительном направлении на расстоянии 2-х единичных отрезков отметим точку  От точки
От точки  вдоль положительного направления оси
вдоль положительного направления оси  и параллельно этой оси, на расстоянии 4-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 4-х единичных отрезков отметим точку  От точки
От точки  вдоль положительного направления оси
вдоль положительного направления оси  и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку 
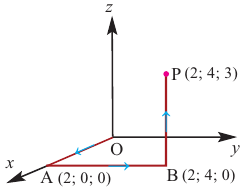
b) для построения точки  от начала координат по оси
от начала координат по оси  в отрицательном направлении на расстоянии 2-х единичных отрезков отметим точку
в отрицательном направлении на расстоянии 2-х единичных отрезков отметим точку 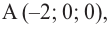 от точки
от точки  вдоль отрицательного направления оси
вдоль отрицательного направления оси  и параллельно этой оси, на расстоянии 2-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 2-х единичных отрезков отметим точку  От точки
От точки  вдоль положительного направления оси
вдоль положительного направления оси  и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку
и параллельно этой оси, на расстоянии 3-х единичных отрезков отметим точку 
Пример №17
От точки  к осям координат проведены перпендикуляры. Запишите координаты оснований перпендикуляров, соответствующих точкам
к осям координат проведены перпендикуляры. Запишите координаты оснований перпендикуляров, соответствующих точкам  и
и 
Решение: для точки основания перпендикуляра, проведенного из точки  на ось
на ось  координаты
координаты  и
и  равны нулю. Значит, координаты точки –
равны нулю. Значит, координаты точки –  Аналогично, координаты остальных точек –
Аналогично, координаты остальных точек –  и
и 
Пример №18
От точки  к плоскостям
к плоскостям  и
и  проведены перпендикуляры. Запишите координаты точек
проведены перпендикуляры. Запишите координаты точек  и
и  которые являются основаниями перпендикуляров.
которые являются основаниями перпендикуляров.
Решение: координата  точки основания перпендикуляра, опущенного от точки
точки основания перпендикуляра, опущенного от точки  на плоскость
на плоскость  равна нулю. Значит, точка
равна нулю. Значит, точка  имеет координаты
имеет координаты  Аналогично находят координаты других точек:
Аналогично находят координаты других точек:  и
и 
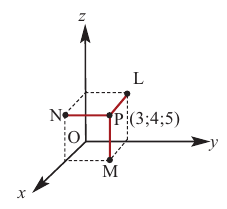
Расстояние между двумя точками в пространстве
Расстояние между точками  и
и  вычисляется но формуле
вычисляется но формуле

Доказательство. Пусть  диагональ параллелепипеда
диагональ параллелепипеда  с ребрами
с ребрами  и
и  которые параллельны координатным осям
которые параллельны координатным осям  Из прямоугольного треугольника
Из прямоугольного треугольника  прямой) имеем:
прямой) имеем:  Из прямоугольного треугольника
Из прямоугольного треугольника  прямой) имеем:
прямой) имеем: 

Учитывая, что 
получаем, 
Расстояние от начала координат
В прямоугольной системе координат в пространстве расстояние от точки  начала координат до любой точки
начала координат до любой точки  вычисляется по формуле:
вычисляется по формуле:
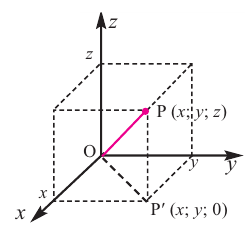
Пример №19
Точки, расположенные на одной прямой, называются коллинеарными точками.
Докажите, что точки  и
и  являются коллинеарными точками, используя формулу нахождения расстояния между двумя точками.
являются коллинеарными точками, используя формулу нахождения расстояния между двумя точками.
Решение:


Так как  то точки
то точки  и
и  расположены на одной прямой, т. е. они коллинеарны.
расположены на одной прямой, т. е. они коллинеарны.
Пример №20
Найдите координаты точки, расположенной на оси абсцисс и равноудаленной от точек  и
и 
Решение: если точка  расположена на оси абсцисс, значит ее координаты-
расположена на оси абсцисс, значит ее координаты- Так как точка равноудалена от точек
Так как точка равноудалена от точек  и
и  то
то  или
или  По формуле расстояния между двумя точками имеем:
По формуле расстояния между двумя точками имеем:

Значит, точка  расположена на оси абсцисс и равноудалена от точек
расположена на оси абсцисс и равноудалена от точек  и
и 
Координаты точки, делящей отрезок в некотором отношении
Координаты точки  делящей отрезок с концами в точках
делящей отрезок с концами в точках 
и  в отношении
в отношении  находятся как:
находятся как:

Доказательство: пусть точка  делит отрезок
делит отрезок  в заданном отношении. Через точки
в заданном отношении. Через точки  и
и  к плоскости
к плоскости  проведем перпендикуляры
проведем перпендикуляры  и
и  и через точки
и через точки  перпендикуляры
перпендикуляры  и
и  к оси
к оси  По рисунку видно, что
По рисунку видно, что  и
и 
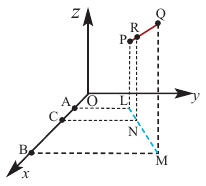
На основе теоремы о пропорциональных отрезках имеем:
Аналогично, используя перпендикуляры к осям  и
и  можно определить координаты
можно определить координаты  и
и 

Координаты середины отрезка
Координаты середины отрезка, соединяющих точки  и
и  находятся следующим образом:
находятся следующим образом:

Координаты центра тяжести треугольника
Координаты центра тяжести треугольника (точка пересечения медиан) с вершинами в точках  и
и  находятся следующим образом:
находятся следующим образом:
 (проверьте сами)
(проверьте сами)
Пример №21
Даны точки  и
и  Найдите
Найдите
координаты точки  которая делит отрезок
которая делит отрезок  как
как 
Решение: пусть точка  имеет координаты
имеет координаты  Эта точка делит отрезок
Эта точка делит отрезок  в отношении
в отношении  По формуле нахождения координаты
По формуле нахождения координаты
точки, делящей отрезок в заданном отношении, получаем:

Пример №22
Даны координаты двух вершин треугольника  и
и  Найдите координаты третьей вершины, если центр тяжести треугольника совпадает с началом координат.
Найдите координаты третьей вершины, если центр тяжести треугольника совпадает с началом координат.
Решение: так как центр тяжести находится в начале координат, то:
Отсюда, 
Значит, третьей вершиной треугольника является точка 
Векторы в пространстве
Векторной величиной или вектором называется величина, которая определяется не только значением, но и направлением. Изображается вектор направленным отрезком. Длина отрезка, образующего вектор, называется длиной вектора или его модулем.
Вектор можно изобразить в одномерной, двухмерной и трехмерной системе координат.
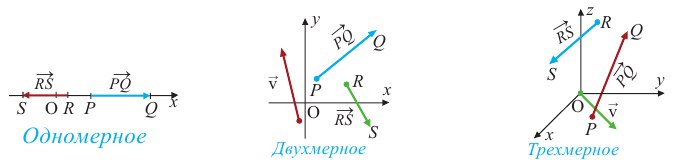
Вектор, у которого начальная и конечная точки совпадают, называется нулевым вектором. Направление нулевого вектора не определено. Местоположение любой точки (объекта) в пространстве изображается вектором, начало которого совпадает с началом координат, а конец – с данной точкой. Например, на рисунке изображен вектор, показывающий положение мяча в пространстве, который брошен на высоту 3 м на игровой площадке, длина которой равна 4 м, а ширина 2 м.
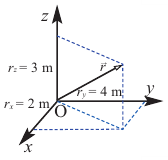
В пространстве вектор, который определяет место (положение, позицию) точки и соединяет начальную и заданную точку, называется позиционным вектором или радиус – вектором. Каждой точке пространства соответствует единственный позиционный вектор. Положение точки  в пространственной системе координат определяет вектор
в пространственной системе координат определяет вектор  – вектор, заданный компонентами.
– вектор, заданный компонентами.
Два вектора называются равными если они имеют равные модули и одинаково направлены. Равные векторы, при помощи параллельного переноса, можно расположить друг на друге. Например, на рисунке векторы  и
и  равны. Для позиционного вектора можно провести бесконечно много равных по модулю и направлению векторов. В пространстве вектор с началом в точке
равны. Для позиционного вектора можно провести бесконечно много равных по модулю и направлению векторов. В пространстве вектор с началом в точке  и концом в точке
и концом в точке  записывается компонентами как
записывается компонентами как  Соответствующие компоненты равных векторов равны и наоборот. Векторы, которые равны по модулю, но имеют противоположные направления, называются противоположными векторами.
Соответствующие компоненты равных векторов равны и наоборот. Векторы, которые равны по модулю, но имеют противоположные направления, называются противоположными векторами.
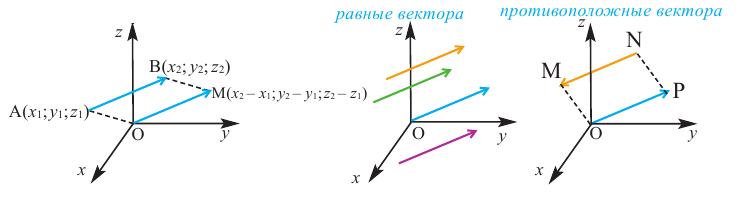
В пространстве, как и на плоскости, можно геометрически построить сумму и разность векторов, и произведение вектора на число.
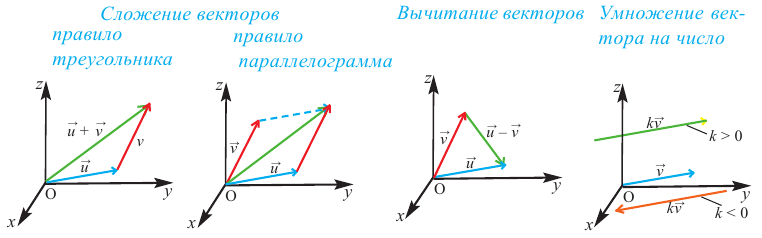
Найти компоненты и длину вектора, а также выполнить действия над векторами в пространственной Декартовой системе координат можно но правилам, аналогичным для прямоугольной системы координат на плоскости.
Длина вектора
Модуль вектора можно найти, используя формулу нахождения расстояния между двумя точками.
Теорема. Если начало вектора расположено в точке  а конец в точке
а конец в точке  то длина вектора
то длина вектора  вычисляется по формуле:
вычисляется по формуле:

Следствие. Длина радиус-вектора равна  (находится по формуле нахождения расстояния от начала координат до точки).
(находится по формуле нахождения расстояния от начала координат до точки).
Сложение и вычитание векторов
Сложение и вычитание векторов: суммой (разностью) векторов  и
и  является вектор, компоненты которого равны сумме (разности) соответствующих компонент векторов, т. е. сумма (разность) векторов
является вектор, компоненты которого равны сумме (разности) соответствующих компонент векторов, т. е. сумма (разность) векторов  и
и равна вектору:
равна вектору:


Пример №23
Найдите сумму и разность векторов  и
и 
Решение:

Умножение вектора на число
Умножение вектора на число: произведение вектора  на действительное число к определяется как вектор
на действительное число к определяется как вектор  Для произведения вектора на действительное число справедливы следующие правила:
Для произведения вектора на действительное число справедливы следующие правила:
Пример №24
Для вектора  и
и  запишите компонентами вектор
запишите компонентами вектор 
Решение: 
Коллинеарные векторы
Если направленные отрезки, которыми изображены векторы, параллельны или лежат на одной прямой, то вектора называются коллинеарными. Если векторы  и
и  коллинеарны, тогда существует единственное число
коллинеарны, тогда существует единственное число  которое удовлетворяет условию
которое удовлетворяет условию  При
При  векторы сонаправленные, при
векторы сонаправленные, при  они направлены в противоположные стороны. Соответствующие координаты коллинеарных векторов пропорциональны:
они направлены в противоположные стороны. Соответствующие координаты коллинеарных векторов пропорциональны:

При  это условие запишется как:
это условие запишется как: 
Пример №25
Определите, являются ли расположенные в пространстве векторы  и
и  коллинеарными.
коллинеарными.
Решение: так как  вектор
вектор  и
и  коллинеарны и сонаправлены.
коллинеарны и сонаправлены.
Пример №26
Постройте радиус-вектор, равный вектору 
Решение: в _соответствии с правилом треугольника  Точкам
Точкам  и
и  соответствуют радиус-векторы
соответствуют радиус-векторы  и
и 
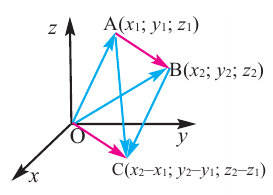
По правилу сложения векторов на плоскости  Отсюда,
Отсюда,

Пример №27
В трехмерной системе координат задан вектор  с началом в точке
с началом в точке  и концом в точке
и концом в точке  а) Найдите длину вектора
а) Найдите длину вектора  б) Запишите компонентами радиус-вектор, равный вектору
б) Запишите компонентами радиус-вектор, равный вектору 
Решение: а) 
b) Обозначим вектор, равный вектору  через
через  Тогда точке
Тогда точке 
соответствует радиус-вектор  точке
точке  соответствует
соответствует
радиус-вектор 

Так как  то
то 
Пример №28
Установите справедливость равенства  для точек
для точек  и
и 
Решение:

Из равенства соответствующих компонентов следует
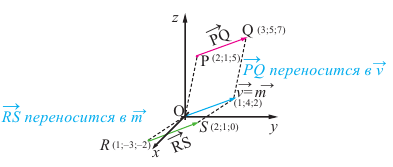
Векторы, расположенные на одной плоскости или на параллельных плоскостях, называются компланарными векторами. Например, векторы, расположенные на противолежащих гранях куба, компланарны, а векторы, направленные по трем ребрам выходящим из одной вершины, некомпланарны.
Единичный вектор – вектор, длина которого равна единице.
Для любого, отличного от нуля вектора  вектор вида
вектор вида  является единичным вектором. 1 1
является единичным вектором. 1 1
Пример №29
Для вектора  а) найдите единичный сонаправленный вектор
а) найдите единичный сонаправленный вектор  b) запишите компонентами вектор
b) запишите компонентами вектор  сонанравленный вектору
сонанравленный вектору  длина которого равна 10 единицам.
длина которого равна 10 единицам.
Решение: обозначим единичный вектор через 

Проверим, действительно ли длина этого вектора равна единице:
b) чтобы определить вектор, сонаправленный с вектором  длиной 10 единиц, надо компоненты единичного вектора, найденного в пункте а, увеличить в 10 раз.
длиной 10 единиц, надо компоненты единичного вектора, найденного в пункте а, увеличить в 10 раз.

В прямоугольной системе координат в пространстве векторы, направленные вдоль положительных направлений координатных осей  и определенные как
и определенные как  и
и  при
при
 называются орт векторами. Понятно, что векторы
называются орт векторами. Понятно, что векторы 
– некомпланарны.
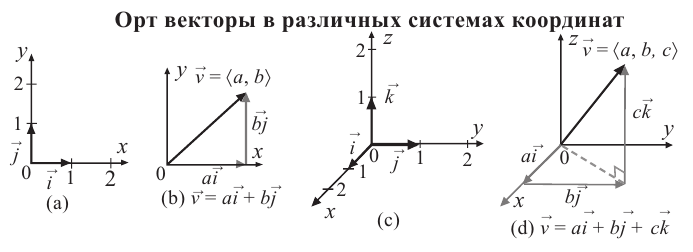
Любой позиционный вектор и на плоскости, и в пространстве, можно выразить через орт вектора. На плоскости точке  соответствует позиционный вектор
соответствует позиционный вектор  в пространстве точке
в пространстве точке  соответствует вектор
соответствует вектор  Данное выражение называется записью вектора компонентами. Здесь числа
Данное выражение называется записью вектора компонентами. Здесь числа  координаты точки
координаты точки 
Теорема. Любой вектор  можно разложить но орт векторам
можно разложить но орт векторам  единственным образом, при этом справедливо равенство
единственным образом, при этом справедливо равенство

Пример №30
Вектор  началом которого на плоскости является точка
началом которого на плоскости является точка  а концом точка
а концом точка  выразите через орт вектора.
выразите через орт вектора.
Решение: зная, что  получим
получим 
Пример №31
Запишите разложение вектора  в пространстве по орт векторам.
в пространстве по орт векторам.
Решение: по теореме разложения вектора по орт векторам имеем: 
Пример №32
а) Запишите в виде  позиционный вектор, соответствующий точке
позиционный вектор, соответствующий точке 
b) Запишите вектор  компонентами в виде
компонентами в виде 
Решение: а) начало позиционного вектора совпадает с началом координат  Таким образом вектор
Таким образом вектор  имеет вид
имеет вид 
Пример №33
Найдите сумму и разность векторов.

Решение:


Скалярное произведение двух векторов
Тележка переместилась на расстояние  по прямой под действием силы
по прямой под действием силы  направленной под углом наклона
направленной под углом наклона  Вычислите совершаемую работу: если значение силы
Вычислите совершаемую работу: если значение силы  равно
равно  то
то  На горизонтальном пути работа вертикальной компоненты силы
На горизонтальном пути работа вертикальной компоненты силы  равна нулю. Тогда работа, совершаемая горизонтальной компонентой силы
равна нулю. Тогда работа, совершаемая горизонтальной компонентой силы  на расстоянии
на расстоянии  будет:
будет:

Работа, совершаемая при перемещении груза на расстояние  равна произведению длины вектора перемещения и значения компонента вектора силы
равна произведению длины вектора перемещения и значения компонента вектора силы  направленной вдоль перемещения.
направленной вдоль перемещения.
Работа является скалярной величиной, однако ее значение зависит от угла между силой, действующей на тело, и вектором перемещения.
Скалярное произведение двух векторов
Углом между любыми двумя ненулевыми векторами  и
и  называется угол
называется угол  между равными им векторами с общим началом. Ясно, что
между равными им векторами с общим началом. Ясно, что 
Скалярное произведение двух ненулевых векторов и равно произведению модулей этих векторов и косинуса угла между ними.
Скалярное произведение записывается как: 
Значит, 
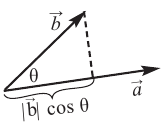
Свойство скалярного произведения
• Для любого вектора  справедливо равенство
справедливо равенство  то есть скалярный квадрат вектора равен квадрату его длины.
то есть скалярный квадрат вектора равен квадрату его длины.
Переместительное свойство скалярного произведения.
Для любых векторов и  справедливо равенство
справедливо равенство 
Свойство группировки скалярного произведения. Для любых векторов и и действительного числа  справедливо равенство
справедливо равенство

Распределительное свойство скалярного произведения:
1) Для любых векторов, и действительного числа справедливо следующее равенство  2) Для любых векторов
2) Для любых векторов  справедливо равенство
справедливо равенство
В частном случае, для скалярного произведения орт векторов получим:

Пример №34
По данным на рисунке найдите скалярное произведение векторов  и
и 
Решение: 


Пример №35
Упростите выражение  используя свойство скалярного произведения векторов.
используя свойство скалярного произведения векторов.
Решение:

Скалярное произведение двух векторов на координатной плоскости можно найти при помощи координат.
Пусть даны векторы  и
и  По определению скалярного произведения имеем
По определению скалярного произведения имеем
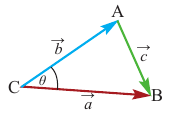
Из  получаем
получаем 
По теореме косинусов получаем 
 а это значит, что
а это значит, что 
Таким образом, скалярное произведение двух векторов  и
и  равно сумме произведений соответствующих компонент.
равно сумме произведений соответствующих компонент.
Аналогичным образом, скалярное произведение двух векторов  и
и  в трехмерной, Декартовой системе координат находится как:
в трехмерной, Декартовой системе координат находится как:  .
.
Пример №36
Зная, что  найдите скалярное произведение
найдите скалярное произведение 
Решение: 
Угол между двумя векторами
Угол между двумя ненулевыми векторами находится из соотношения  , здесь
, здесь 

Пример №37
Найдите косинус угла между векторами  и
и 
Решение:

Вывод: два ненулевых вектора перпендикулярны тогда и только тогда, когда их скалярное произведение равно нулю: 
Пример №38
При каком значении  вектора
вектора и
и  взаимно перпендикулярны?
взаимно перпендикулярны?
Решение:  при
при  имеем
имеем 
Общее уравнение прямой
В системе координат на плоскости уравнение прямой имеет вид  Это уравнение называется общим уравнением прямой. Вектор, перпендикулярный прямой, называется нормальным вектором к данной прямой или нормалью. Покажем, что общее уравнение прямой с нормалью
Это уравнение называется общим уравнением прямой. Вектор, перпендикулярный прямой, называется нормальным вектором к данной прямой или нормалью. Покажем, что общее уравнение прямой с нормалью  имеет вид
имеет вид  Пусть
Пусть  заданная точка на прямой, а точка
заданная точка на прямой, а точка  произвольная точка на прямой, отличная от точки
произвольная точка на прямой, отличная от точки  а вектор
а вектор  – нормаль к прямой.
– нормаль к прямой.
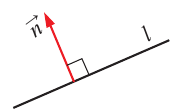
Так как векторы  и
и  перпендикулярны, то
перпендикулярны, то
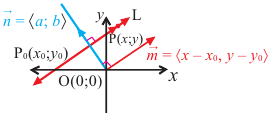
Если ввести обозначение  то получим уравнение в виде
то получим уравнение в виде  Здесь
Здесь 
Частные случаи:
•  уравнение прямой, параллельной оси абсцисс
уравнение прямой, параллельной оси абсцисс
•  уравнение прямой, параллельной оси ординат
уравнение прямой, параллельной оси ординат
•  уравнение прямой, проходящей через начало координат
уравнение прямой, проходящей через начало координат
Пример №39
Запишите уравнение прямой  проходящей через точку
проходящей через точку  нормаль к которой равна
нормаль к которой равна 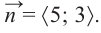
Решение: на координатной плоскости построим вектор  и изобразим графическое решение задания, проведя через точку
и изобразим графическое решение задания, проведя через точку  прямую перпендикулярную нормали. Теперь запишем требуемое уравнение.
прямую перпендикулярную нормали. Теперь запишем требуемое уравнение.
Способ 1.
Пусть точка  является точкой, расположенной на прямой
является точкой, расположенной на прямой  и отличной от точки
и отличной от точки  Тогда вектор
Тогда вектор  коллинеарен прямой
коллинеарен прямой  и
и  Так как вектора
Так как вектора  и
и  перпендикулярны, то
перпендикулярны, то  Тогда получим:
Тогда получим: 
Таким образом, 
Способ 2.
Зная нормаль  уравнение
уравнение  можно записать следующим образом:
можно записать следующим образом:  Так как точка
Так как точка  должна находится на прямой, то
должна находится на прямой, то  и уравнение будет
и уравнение будет 
Пример №40
Найдите угол между прямыми, заданными уравнениями  и
и 
Решение: угол между прямыми можно найти как угол между их нормалями.
Для угла  между нормальных векторов
между нормальных векторов  и
и  имеем:
имеем: 
Отсюда 
Пример №41
Найдите расстояние от точки  до прямой
до прямой 
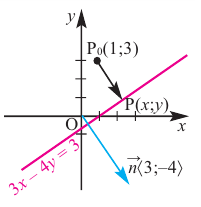
Решение: пусть точка  является основанием перпендикуляра, проведенного к прямой от точки
является основанием перпендикуляра, проведенного к прямой от точки 
Так как векторы  и
и  коллинеарны, го существует такое число
коллинеарны, го существует такое число  что
что  или
или  Из равенства соответствующих компонент получим
Из равенства соответствующих компонент получим  Координаты
Координаты  и
и  точки
точки  должны удовлетворять уравнению
должны удовлетворять уравнению 

Отсюда  Тогда
Тогда 
Уравнение плоскости
Исследование. Какому множеству точек соответствует одно и тоже уравнение, например  в одномерной, двухмерной и трехмерной системах координат?
в одномерной, двухмерной и трехмерной системах координат?
1. В одномерной системе координат, т.е. на числовой оси, уравнению  соответствует одна точка.
соответствует одна точка.
2. В двухмерной системе координат уравнению  или
или  удовлетворяют все точки с координатами
удовлетворяют все точки с координатами  Множеством таких точек является прямая, параллельная оси
Множеством таких точек является прямая, параллельная оси 
3. В трехмерной системе координат уравнению  или
или  удовлетворяет множество точек
удовлетворяет множество точек  Множеством таких точек является плоскость, параллельная плоскости Аналогично, уравнениям
Множеством таких точек является плоскость, параллельная плоскости Аналогично, уравнениям  и
и  соответствуют плоскости, параллельные плоскостям
соответствуют плоскости, параллельные плоскостям  и
и 
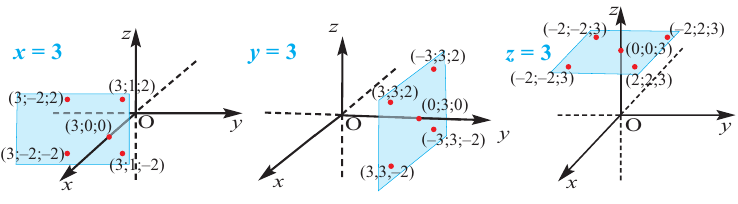
4. В трехмерной системе координат представьте множество точек, удовлетворяющих уравнениям  и
и 
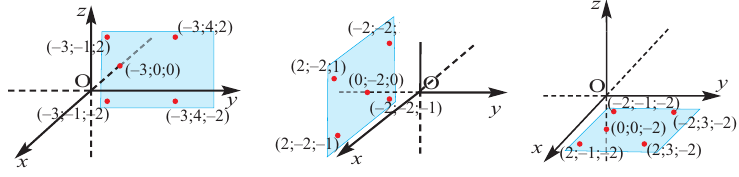 5. Сопоставьте координаты точек, данных на плоскости, с уравнениями
5. Сопоставьте координаты точек, данных на плоскости, с уравнениями  и
и  Представьте плоскости.
Представьте плоскости.
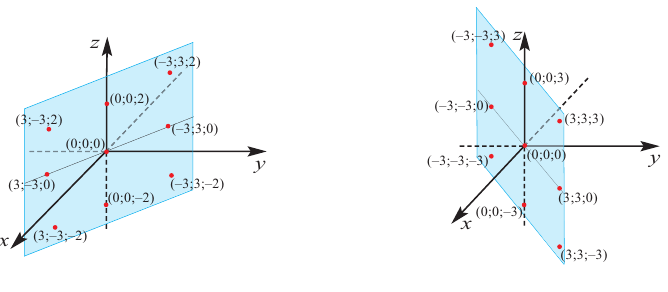
Уравнение прямой в двухмерной системе координат имеет вид 
Например, уравнение  определяет прямую, проходящую через точки
определяет прямую, проходящую через точки 
 и
и 
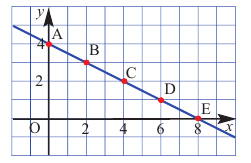
В трехмерной системе координат мы можем написать это уравнение в виде:  Так как коэффициент
Так как коэффициент  равен нулю, то аппликата
равен нулю, то аппликата  может получать любые значения. Т. е. в трехмерной системе координат для любого
может получать любые значения. Т. е. в трехмерной системе координат для любого  координаты точек
координаты точек  и
и  удовлетворяет уравнению
удовлетворяет уравнению  Если отметить все такие точки в трехмерной системе координат, то получим плоскость, параллельную оси
Если отметить все такие точки в трехмерной системе координат, то получим плоскость, параллельную оси  В общем, уравнение плоскости в трехмерной системе координат имеет вид
В общем, уравнение плоскости в трехмерной системе координат имеет вид 
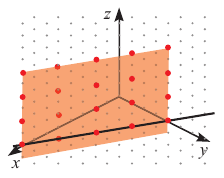
Плоскость может быть определена различными способами.
- тремя неколлинеарными точками
- прямой и точкой, не принадлежащей этой прямой
- двумя пересекающимися прямыми
- двумя параллельными прямыми
- точкой и перпендикуляром в этой точке в заданном направлении
Используя последний способ, которым можно задать плоскость, покажем, что уравнение плоскости имеет вид  Вектор, перпендикулярный к плоскости называется ее нормалью. Пусть, дана плоскость
Вектор, перпендикулярный к плоскости называется ее нормалью. Пусть, дана плоскость  точка
точка  расположенная на этой плоскости и нормаль
расположенная на этой плоскости и нормаль  к этой плоскости. Выберем на этой плоскости какую-либо другую точку
к этой плоскости. Выберем на этой плоскости какую-либо другую точку  и соединим точки
и соединим точки  и
и  Прямая, перпендикулярная плоскости, перпендикулярна каждой прямой, лежащей в данной плоскости. Значит
Прямая, перпендикулярная плоскости, перпендикулярна каждой прямой, лежащей в данной плоскости. Значит

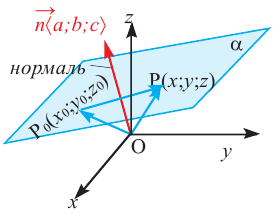
А это значит, что  Учитывая, что
Учитывая, что  и
и  имеем:
имеем:

Обозначим  тогда уравнение плоскости будет иметь вид:
тогда уравнение плоскости будет иметь вид: 
Внимание! Три коэффициента при переменных в уравнении плоскости являются компонентами нормали и 
Пример №42
Плоскость с нормалью  проходит через точку
проходит через точку  Запишите уравнение этой плоскости.
Запишите уравнение этой плоскости.
Решение: задание можно выполнить двумя способами.
1-ый способ. Возьмем произвольную точку  на плоскости и запишем компонентами вектор с началом в точке
на плоскости и запишем компонентами вектор с началом в точке  и концом в точке
и концом в точке  Вектор будет иметь вид
Вектор будет иметь вид  Так как нормальный вектор имеет вид
Так как нормальный вектор имеет вид  то
то  или справедливо следующее:
или справедливо следующее:
 Отсюда
Отсюда
Умножим обе части уравнения на  Тогда уравнение данной плоскости будет иметь вид
Тогда уравнение данной плоскости будет иметь вид 
2-ой способ. Известно, что уравнение плоскости имеет вид  а нормаль к плоскости имеет вид
а нормаль к плоскости имеет вид  Значит, коэффициенты
Значит, коэффициенты  известны. Из вектора нормали
известны. Из вектора нормали  имеем:
имеем:  Записав координаты точки
Записав координаты точки  принадлежащей плоскости, в уравнение
принадлежащей плоскости, в уравнение  найдем переменную
найдем переменную 
 и уравнение плоскости будет иметь вид:
и уравнение плоскости будет иметь вид:  или
или 
Пример №43
Дано уравнение плоскости 
a) Определите, принадлежат ли точки  плоскости.
плоскости.
b) Определите координаты точки пересечения плоскости с осями 
c) Запишите координаты какой-либо другой точки, принадлежащей данной плоскости.
Решение:
а) Проверка:

Принадлежит плоскости
Принадлежит плоскости
Не принадлежит плоскости
b) Координаты точек пересечения с осями 
в точке пересечения с осью  координаты
координаты  и
и  равны нулю
равны нулю
в точке пересечения с осью координаты и равны нулю

в точке пересечения с осью координаты и равны нулю
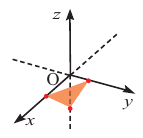
c) Для определения координаты другой точки на заданной плоскости задайте любые значения двум переменным и найдите третью координату.
Например, при  значение
значение  находят гак:
находят гак:  Значит, точка
Значит, точка  принадлежит данной плоскости.
принадлежит данной плоскости.
- Заказать решение задач по высшей математике
Пример №44
Найдите расстояние от точки  до плоскости
до плоскости 
Решение: пусть точка  является основанием перпендикуляра, проведенного от точки
является основанием перпендикуляра, проведенного от точки  Так как векторы
Так как векторы  и
и  коллинеарны, то существует такое число
коллинеарны, то существует такое число  что
что  или
или  Из равенства соответствующих компонент получим
Из равенства соответствующих компонент получим  Координаты
Координаты 
 точки
точки  удовлетворяют уравнению:
удовлетворяют уравнению:

Отсюда  Тогда
Тогда 
Это говорит о том, что расстояние от заданной точки  до плоскости равно 3 единицам.
до плоскости равно 3 единицам.
Взаимное расположение плоскостей
Плоскости  и
и  перпендикулярны тогда и только тогда, когда перпендикулярны их нормали:
перпендикулярны тогда и только тогда, когда перпендикулярны их нормали: 
Плоскости и параллельны тогда и только тогда, когда параллельны их нормали: 
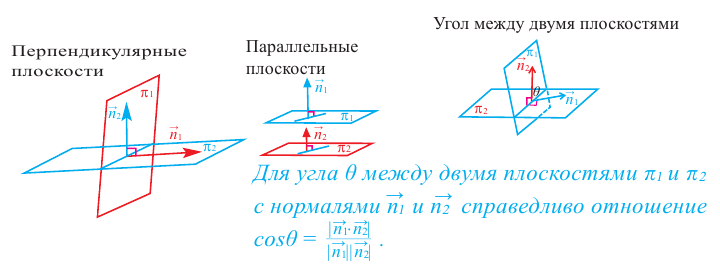
Пример №45
Определение параллельности или перпендикулярности плоскостей но уравнению.
a) плоскость  задана уравнением
задана уравнением  а плоскость
а плоскость  задана уравнением
задана уравнением  Обоснуйте, что данные плоскости перпендикулярны.
Обоснуйте, что данные плоскости перпендикулярны.
b) плоскость  задана уравнением
задана уравнением  а плоскость
а плоскость  задана уравнением
задана уравнением  Обоснуйте, что данные плоскости параллельны.
Обоснуйте, что данные плоскости параллельны.
Решение: для того чтобы плоскости и были перпендикулярны, скалярное произведение нормалей  и
и  плоскостей и должно равняться нулю.
плоскостей и должно равняться нулю.

Значит, плоскости и перпендикулярны: 
Нормали плоскостей и равны:  Если для данных плоскостей постоянная
Если для данных плоскостей постоянная  имеет различное значение, то это значит, что плоскости не лежат друг на друге, т. е. они параллельны.
имеет различное значение, то это значит, что плоскости не лежат друг на друге, т. е. они параллельны.
Уравнение сферы
Определение. Сферой называется множество всех точек, расположенных на расстоянии  от заданной точки
от заданной точки  Точка
Точка  называется центром сферы,
называется центром сферы,  радиусом сферы.
радиусом сферы.
Если точка  – произвольная точка сферы, то по формуле расстояния между двумя точками имеем:
– произвольная точка сферы, то по формуле расстояния между двумя точками имеем:

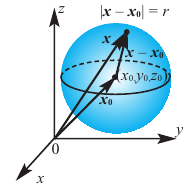
Это уравнение сферы с центром в точке  и радиусом
и радиусом 
Если центр сферы находится в начале координат, то уравнение сферы радиуса  имеет вид:
имеет вид:

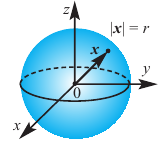
Как видно из рисунка, пересечение этой сферы с координатной плоскостью  является ее большой окружностью.
является ее большой окружностью.
Пример №46
Запишите уравнение сферы, радиус которой равен г а центр расположен в точке 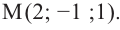
Решение: 
Пример №47
Представьте фигуру, которая получается при пересечении сферы  с плоскостью
с плоскостью 
Решение: радиус сферы  Учитывая в уравнении сферы, что
Учитывая в уравнении сферы, что  получим:
получим:  Пересечение плоскости z = 12 и данной сферы является окружность с центром в точке (0; 0; 12) и радиусом г = 5.
Пересечение плоскости z = 12 и данной сферы является окружность с центром в точке (0; 0; 12) и радиусом г = 5.
Плоскость, имеющая со сферой только одну общую точку, называется плоскостью, касательной к сфере.
Например, плоскость  касается сферы
касается сферы  в точке
в точке 
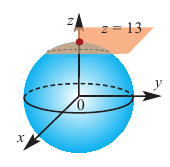
Плоскость, касательная к сфере, в точке касания перпендикулярна радиусу сферы.
Преобразования на плоскости и в пространстве
Ремесленники и художники создают узоры, заполняя некоторую площадь без пробела рисунком при помощи преобразований (параллельный перенос, поворот, отображение) или увеличения или уменьшения этого рисунка (гомотетия).


Это знать интересно. Великий голландский художник Эшер, объединив такие разделы математики как симметрия, комбинаторика, стереометрия и топология, создал динамические рисунки, заполняя плоскости цветовыми оттенками. Не имея специального математического образования, Эшер создавал свои произведения, опираясь на интуицию и визуальные представления. Ряду работ, построенных на параллельном переносе, он дал название “Правильное движение плоскости”.
https://en.wikipedia.org/wiki/M._C._Escher
Если каждой точке  фигуры
фигуры  в пространстве, по определенному правилу, ставится в соответствие единственная точка
в пространстве, по определенному правилу, ставится в соответствие единственная точка  то это называется преобразованием фигуры
то это называется преобразованием фигуры  в пространстве. Преобразование, сохраняющее расстояние между точками, называется движением. Движение преобразовывает плоскость в плоскость, прямую в прямую, отрезок в отрезок, а угол – в конгруэнтный ему угол. Значит, движение преобразовывает фигуру в конгруэнтную себе фигуру. Известно, что в двухмерной системе координат за преобразование каждой точки
в пространстве. Преобразование, сохраняющее расстояние между точками, называется движением. Движение преобразовывает плоскость в плоскость, прямую в прямую, отрезок в отрезок, а угол – в конгруэнтный ему угол. Значит, движение преобразовывает фигуру в конгруэнтную себе фигуру. Известно, что в двухмерной системе координат за преобразование каждой точки  в точку
в точку  т. е. за параллельный перенос отвечает вектор
т. е. за параллельный перенос отвечает вектор  Аналогичным образом, в пространстве при параллельном переносе координаты каждой точки изменяются так:
Аналогичным образом, в пространстве при параллельном переносе координаты каждой точки изменяются так: 
Параллельный перенос является движением. Каждому параллельному переносу соответствует один вектор. Справедливо и обратное.
Пример №48
В какую точку переходит точка  при параллельном переносе на вектор
при параллельном переносе на вектор 
Решение: по определению при данном преобразовании, координаты точки  преобразуются в координаты точки
преобразуются в координаты точки  следующим образом:
следующим образом:  Т. е. при этом параллельном переносе точка
Т. е. при этом параллельном переносе точка  преобразуется в точку
преобразуется в точку 
Симметрия. В пространстве симметрии относительно точки и прямой дается такое же определение как и на плоскости. В пространстве также рассматривается симметрия относительно плоскости.
Для точки  пространства
пространства
- Точка, симметричная относительно начала координат:
- Точка, симметричная относительно оси

- Точка, симметричная относительно оси

- Точка, симметричная относительно оси
- Точка, симметричная относительно плоскости

- Точка, симметричная относительно плоскости

- Точка, симметричная относительно плоскости

Пример №49
Найдите точку, симметричную точке  относительно плоскости
относительно плоскости 
Решение: точка  симметричная точке
симметричная точке  относительно плоскости
относительно плоскости  расположена на прямой, перпендикулярной как плоскости
расположена на прямой, перпендикулярной как плоскости  так и плоскости
так и плоскости  Поэтому абсциссы и ординаты точек равны:
Поэтому абсциссы и ординаты точек равны:  Координаты точки
Координаты точки  можно найти из отношения
можно найти из отношения  Таким образом, это точка
Таким образом, это точка 
Поворот. Поворотом фигуры в пространстве вокруг прямой  на угол
на угол  называется такое преобразование, при котором каждая плоскость, перпендикулярная прямой
называется такое преобразование, при котором каждая плоскость, перпендикулярная прямой  поворачивается в одном направлении на угол
поворачивается в одном направлении на угол  вокруг точек пересечения прямой
вокруг точек пересечения прямой  с плоскостью. Прямая
с плоскостью. Прямая  называется осью симметрии, угол
называется осью симметрии, угол  называется углом поворота.
называется углом поворота.
Ниже на рисунках представлены примеры различных изображений поворота куба вокруг оси  в направлении по часовой стрелке на угол 90°, 180°, 270°.
в направлении по часовой стрелке на угол 90°, 180°, 270°.
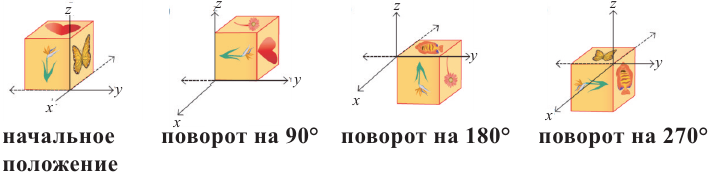
Гомотетия
Аналогичным образом в пространстве вводится понятие преобразования подобия. Если при преобразовании фигуры расстояние между двумя точками  и
и  изменяется в
изменяется в  раз, то такое преобразование называется преобразованием подобия. Здесь число к называется коэффициентом подобия.
раз, то такое преобразование называется преобразованием подобия. Здесь число к называется коэффициентом подобия.
Если для любой точки фигуры  при преобразовании ее в точку
при преобразовании ее в точку  выполняется равенство
выполняется равенство  то это преобразование называется гомотетией с центром в точке
то это преобразование называется гомотетией с центром в точке  и с коэффициентом
и с коэффициентом  Гомотетия – это преобразование подобия. В частном случае, при
Гомотетия – это преобразование подобия. В частном случае, при  получаем центральную симметрию относительно
получаем центральную симметрию относительно  при
при  – тождественное преобразование.
– тождественное преобразование.
Пример №50
Пусть дана сфера с центром в точке  и радиусом 2. Запишите уравнение сферы, полученной гомотетией с центром в начале координат и коэффициентом
и радиусом 2. Запишите уравнение сферы, полученной гомотетией с центром в начале координат и коэффициентом 
Решение: позиционный вектор, соответствующий точке  равен
равен  Пусть позиционный вектор, соответствующий точке
Пусть позиционный вектор, соответствующий точке  будет
будет  Тогда, по определению,
Тогда, по определению,  или
или  Тогда
Тогда  Т. е. центром данной сферы будет точка
Т. е. центром данной сферы будет точка  Зная, что радиус сферы равен
Зная, что радиус сферы равен  получим уравнение сферы
получим уравнение сферы 
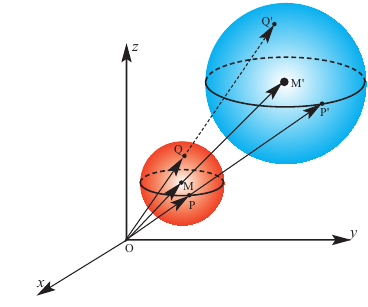
Предел
Это интересно!
Предел (лимит) от латинского слова “limes”, что означает цель.
Понятие предела независимо друг от друга было введено английским математиком Исааком Ньютоном (1642-1727) и немецким математиком Готфридом Лейбницом (1646-1716). Однако ни Ни Ныотон, ни Лейбниц не смогли полностью объяснить вводимые ими понятия. Точное определение предела было дано французским математиком Коши. А работы немецкого ученого » Вейерштрасса наконец завершили создание этой серьезной теории.
Координаты и векторы в пространстве
В этом параграфе вы ознакомитесь с прямоугольной системой координат в пространстве, научитесь находить координаты точек в пространстве, длину отрезка и координаты его середины. Вы обобщите и расширите свои знания о векторах.
Декартовы координаты точки в пространстве
В предыдущих классах вы ознакомились с прямоугольной (декартовой) системой координат на плоскости — это две перпендикулярные координатные прямые с общим началом отсчета (рис. 38.1).
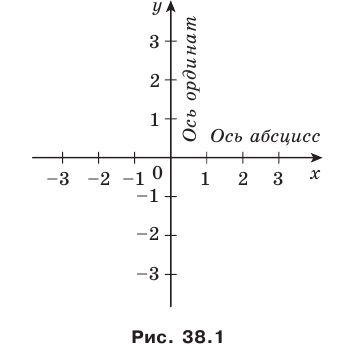
Систему координат можно ввести и в пространстве. Прямоугольной (декартовой) системой координат в пространстве называют три попарно перпендикулярные координатные прямые с общим началом отсчета (рис. 38.2). Точку, в которой пересекаются три координатные прямые, обозначают буквой О. Ее называют началом координат. Координатные прямые обозначают буквами  их соответственно называют осью абсцисс, осью ординат и осью аппликат.
их соответственно называют осью абсцисс, осью ординат и осью аппликат.
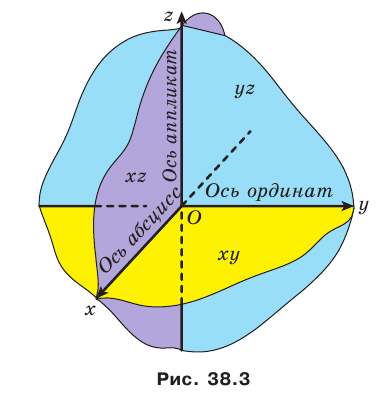
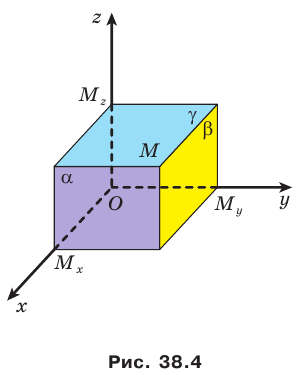
Плоскости, проходящие через пары координатных прямых  и
и  называют координатными плоскостями, их соответственно обозначают
называют координатными плоскостями, их соответственно обозначают  (рис. 38.3).
(рис. 38.3).
Пространство, в котором задана система координат, называют координатным пространством. Если оси координат обозначены буквами  то координатное пространство обозначают
то координатное пространство обозначают  Из курса планиметрии вы знаете, что каждой точке М координатной плоскости
Из курса планиметрии вы знаете, что каждой точке М координатной плоскости  ставится в соответствие упорядоченная пара чисел
ставится в соответствие упорядоченная пара чисел  , которые называют координатами точки М. Записыва ют:
, которые называют координатами точки М. Записыва ют:
Аналогично каждой точке М координатного пространства ставится в соответствие упорядоченная тройка чисел  , определяемая следующим образом. Проведем через точку М три плоскости
, определяемая следующим образом. Проведем через точку М три плоскости  перпендикулярно осям
перпендикулярно осям  соответственно. Точки пересечения этих плоскостей с координатными осями обозначим
соответственно. Точки пересечения этих плоскостей с координатными осями обозначим  (рис. 38.4). Координату точки
(рис. 38.4). Координату точки  на оси
на оси  называют абсциссой точки М и обозначают буквой
называют абсциссой точки М и обозначают буквой  Координату точки
Координату точки  на оси у называют ординатой точки М и обозначают буквой
на оси у называют ординатой точки М и обозначают буквой  . Координату точки
. Координату точки  , на оси
, на оси  называют аппликатой точки М и обозначают буквой
называют аппликатой точки М и обозначают буквой  .
.
Полученную упорядоченную тройку чисел  называют координатами точки М в пространстве. Записывают:
называют координатами точки М в пространстве. Записывают:  . Если точка М имеет координаты
. Если точка М имеет координаты  , то числа
, то числа 
 равны расстояниям от точки М до координатных плоскостей
равны расстояниям от точки М до координатных плоскостей  . Используя этот факт, можно доказать, что, например точки с координатами
. Используя этот факт, можно доказать, что, например точки с координатами  и
и  лежат на прямой, перпендикулярной плоскости
лежат на прямой, перпендикулярной плоскости  и равноудалены от этой плоскости (рис. 38.5). В этом случае говорят, что точки М и N симметричны относительно плоскости
и равноудалены от этой плоскости (рис. 38.5). В этом случае говорят, что точки М и N симметричны относительно плоскости 
Если точка принадлежит координатной плоскости или координатной оси, то некоторые ее координаты равны нулю. Например, точка  принадлежит координатной плоскости
принадлежит координатной плоскости  , а точка
, а точка  — оси аппликат. Справедливы следующие утверждения.
— оси аппликат. Справедливы следующие утверждения.
Теорема 38.1. Расстояние между двумя точками  и
и  можно найти по формуле
можно найти по формуле

Теорема 38.2. Каждая координата середины отрезка равна полусумме соответствующих координат его концов, то есть серединой отрезка с концами в точках  является точка
является точка 
Доказательства теорем 38.1 и 38.2 аналогичны тому, как были доказаны соответствующие теоремы в курсе планиметрии. Например, серединой отрезка с концами в точках  и
и  является начало координат — точка
является начало координат — точка  .
.
В таком случае говорят, что точки А и В симметричны относительно начала координат.
Векторы в пространстве
В курсе планиметрии вы изучали векторы на плоскости. Теперь вы начинаете изучать векторы в пространстве. Многие понятия и свойства, связанные с векторами на плоскости, можно почти дословно отнести к векторам в пространстве. Доказательства такого рода утверждений о векторах в пространстве аналогичны доказательствам соответствующих утверждений о векторах на плоскости.
Рассмотрим отрезок АВ. Если мы договоримся точку А считать началом отрезка, а точку В — его концом, то такой отрезок будет характеризоваться не только длиной, но и направлением от точки А до точки В. Если указано, какая точка является началом отрезка, а какая точка — его концом, то такой отрезок называют направленным отрезком или вектором.
Вектор с началом в точке А и концом в точке В обозначают так:  (читают: «вектор АВ»). Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 39.1 изображены векторы
(читают: «вектор АВ»). Для обозначения векторов также используют строчные буквы латинского алфавита со стрелкой сверху. На рисунке 39.1 изображены векторы
В отличие от отрезка, концы которого — различные точки, у вектора начало и конец могут совпадать.
Договорились называть вектор, начало и конец которого — одна и та же точка, нулевым вектором или нуль-вектором и обозначать  . Модулем вектора
. Модулем вектора  называют длину отрезка АВ. Обозначают:
называют длину отрезка АВ. Обозначают:  . Модуль вектора
. Модуль вектора  обозначают так:
обозначают так:  . Считают, что модуль нулевого вектора равен нулю. Записывают:
. Считают, что модуль нулевого вектора равен нулю. Записывают: 
Определение. Два ненулевых вектора называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
На рисунке 39.2 изображена четырехугольная призма 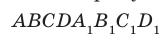 . Векторы
. Векторы  и
и  являются коллинеарными.
являются коллинеарными.
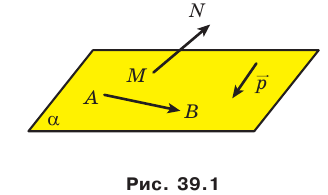
Записывают: 
Ненулевые коллинеарные векторы бывают сонаправленными и противоположно направленными. Например, на рисунке 39.2 векторы  , сонаправлены. Записывают:
, сонаправлены. Записывают:  . Векторы
. Векторы  противоположно направлены. Записывают:
противоположно направлены. Записывают:  .
.
Определение. Два ненулевых вектора называют равны ми, если их модули равны и они сонаправлены. Любые два нулевых вектора равны. На рисунке 39.2 
Часто, говоря о векторах, мы не конкретизируем, какая точка является началом вектора. Так, на рисунке 39.3,  изображен вектор
изображен вектор  . На рисунке 39.3,
. На рисунке 39.3,  изображены векторы, равные вектору
изображены векторы, равные вектору  . Каждый из них также принято называть вектором
. Каждый из них также принято называть вектором  .
.
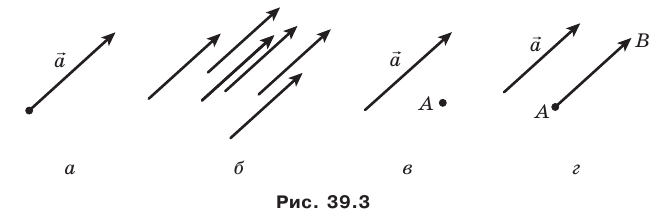
На рисунке 39.3,  изображены вектор
изображены вектор  и точка А. Построим вектор
и точка А. Построим вектор  , равный вектору
, равный вектору  . В таком случае говорят, что вектор
. В таком случае говорят, что вектор  отложен от точки А (рис. 39.3,
отложен от точки А (рис. 39.3,  ).
).
Рассмотрим в координатном пространстве вектор  . От начала координат отложим вектор
. От начала координат отложим вектор  , равный вектору
, равный вектору  (рис. 39.4). Координатами вектора
(рис. 39.4). Координатами вектора  называют координаты точки А . Запись
называют координаты точки А . Запись  означает, что вектор
означает, что вектор  имеет координаты
имеет координаты 
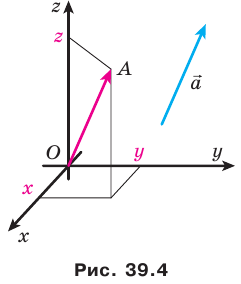
Равные векторы имеют равные соответствующие координаты, и наоборот, если соответствующие координаты векторов равны, то равны и сами векторы.
Теорем а 39.1. Если точки  и
и  — соответственно начало и конец вектора
— соответственно начало и конец вектора  , то числа
, то числа  и
и  равны соответственно первой, второй и третьей координатам вектора
равны соответственно первой, второй и третьей координатам вектора  . Из формулы расстояния между двумя точками следует, что если вектор
. Из формулы расстояния между двумя точками следует, что если вектор  имеет координаты
имеет координаты  , то
, то
Сложение и вычитание векторов
Пусть в пространстве даны векторы  . Отложим от произвольной точки А пространства вектор
. Отложим от произвольной точки А пространства вектор  , равный вектору
, равный вектору  .
.
Далее от точки В отложим вектор  , равный вектору
, равный вектору  . Век тор
. Век тор  называют суммой векторов
называют суммой векторов  (рис. 40.1) и записывают:
(рис. 40.1) и записывают:  Описанный алгоритм сложения двух векторов называют правилом треугольника.
Описанный алгоритм сложения двух векторов называют правилом треугольника.
Можно показать, что сумма  не зависит от выбора точки А. Заметим, что для любых трех точек А, В и С выполняется равенство
не зависит от выбора точки А. Заметим, что для любых трех точек А, В и С выполняется равенство 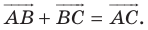 Оно выражает правило треугольника.
Оно выражает правило треугольника.
Свойства сложения векторов аналогичны свойствам сложения чисел. Для любых векторов  выполняются равенства:
выполняются равенства:
Сумму трех и большего количества векторов находят так: вначале складывают первый и второй векторы, потом к полученной сумме прибавляют третий вектор и т. д. Например,  Для тетраэдра DABC, изображенного на рисунке 40.2, можно записать:
Для тетраэдра DABC, изображенного на рисунке 40.2, можно записать: 
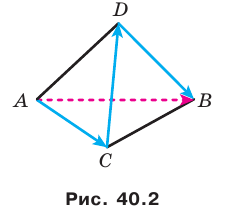
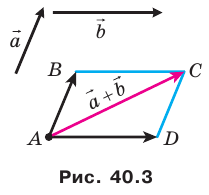
Для сложения двух неколлинеарных векторов  удобно пользоваться правилом параллелограмма.
удобно пользоваться правилом параллелограмма.
Отложим от произвольной точки А вектор  , равный вектору
, равный вектору  , и вектор
, и вектор  , равный вектору
, равный вектору  (рис. 40.3). Построим параллелограмм ABCD. Тогда искомая сумма
(рис. 40.3). Построим параллелограмм ABCD. Тогда искомая сумма  равна вектору
равна вектору  .
.
Рассмотрим векторы 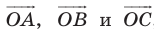 , не лежащие в одной плоскости (рис. 40.4). Найдем сумму этих векторов.
, не лежащие в одной плоскости (рис. 40.4). Найдем сумму этих векторов.
Построим параллелепипед так, чтобы отрезки ОА, ОВ и ОС были его ребрами (рис. 40.5). Отрезок OD является диагональю этого параллелепипеда. Докажем, что  Так как четырехугольник
Так как четырехугольник  — параллелограмм, то
— параллелограмм, то  . Имеем:
. Имеем:  . Поскольку четырехугольник
. Поскольку четырехугольник  — параллелограмм, то
— параллелограмм, то 
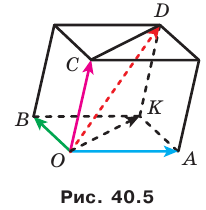
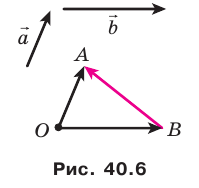
Описанный способ сложения трех векторов, отложенных от одной точки и не лежащих в одной плоскости, называют правилом параллелепипеда.
Определение. Разностью векторов  называют такой вектор
называют такой вектор  , сумма которого с вектором
, сумма которого с вектором  равна вектору
равна вектору  .
.
Записывают:  .
.
Покажем, как построить вектор, равный разности векторов  и
и  . От произвольной точки О отложим векторы
. От произвольной точки О отложим векторы  , соответственно равные векторам
, соответственно равные векторам  (рис. 40.6). Тогда
(рис. 40.6). Тогда  По определению разности двух векторов
По определению разности двух векторов  , то есть
, то есть 
 , следовательно, вектор
, следовательно, вектор  равен разности векторов
равен разности векторов  .
.
Отметим, что для любых трех точек О, А и В выполняется равенство  Оно выражает правило нахождения разности двух векторов, отложенных от одной точки.
Оно выражает правило нахождения разности двух векторов, отложенных от одной точки.
Теорема 40.1. Если координаты векторов  равны соответственно
равны соответственно  , то координаты вектора
, то координаты вектора  равны
равны  , а координаты вектора
, а координаты вектора  равны
равны  .
.
Умножение вектора на число
Определение. Произведением ненулевого вектора  и чис ла
и чис ла  , отличного от нуля, называют такой вектор
, отличного от нуля, называют такой вектор  , что:
, что:
1)
2) если  если
если 
Записывают:  Если
Если  или
или  , то считают, что
, то считают, что  На рисунке 41.1 изображен параллелепипед
На рисунке 41.1 изображен параллелепипед  . Имеем:
. Имеем:  ,
,  Из определения следует, что
Из определения следует, что
 .
.
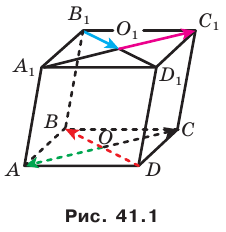
Теорема 41.1. Для любых векторов  выполняется равенство
выполняется равенство 
Эта теорема позволяет свести вычитание векторов к сложению: чтобы из вектора  вычесть вектор
вычесть вектор  , можно к вектору
, можно к вектору  прибавить вектор
прибавить вектор . Произведение
. Произведение  обозначают
обозначают  и называют вектором, противоположным вектору
и называют вектором, противоположным вектору  . Например, записывают:
. Например, записывают:
 Из определения умножения вектора на число следует, что если
Из определения умножения вектора на число следует, что если , то векторы
, то векторы  коллинеарны. Следовательно, из равенства
коллинеарны. Следовательно, из равенства  получаем, что точки О, А и В лежат на одной прямой.
получаем, что точки О, А и В лежат на одной прямой.
Теорема 41.2. Если векторы  коллинеарны и
коллинеарны и  то существует такое число
то существует такое число  , что
, что 
Теорема 41.3. Если координаты вектора  равны
равны  , то координаты вектора
, то координаты вектора  равны
равны  .
.
Умножение вектора на число обладает следующими свойствами.
Для любых чисел 
 и для любых векторов
и для любых векторов  выполняются равенства:
выполняются равенства:
 (сочетательное свойство);
(сочетательное свойство);  (первое распределительное свойство);
(первое распределительное свойство);  (второе распределительное свойство).
(второе распределительное свойство).
Эти свойства позволяют преобразовывать выражения, содержащие сумму векторов, их разность и произведение вектора на число, аналогично тому, как мы преобразовываем алгебраические выражения. Например, 
Скалярное произведение векторов
Пусть  — два ненулевых и несонаправленных вектора. От произвольной точки О отложим векторы
— два ненулевых и несонаправленных вектора. От произвольной точки О отложим векторы  равные соответственно векторам
равные соответственно векторам  (рис. 42.1). Величину угла АОВ будем называть углом между векторами
(рис. 42.1). Величину угла АОВ будем называть углом между векторами 
Угол между векторами  обозначают так:
обозначают так:  . Очевидно, что если
. Очевидно, что если  , то
, то  = 180° (рис. 42.2).
= 180° (рис. 42.2).
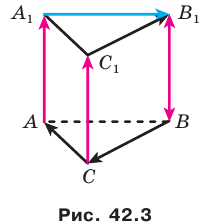
Если  , то считают, что
, то считают, что  . Если хотя бы один из векторов
. Если хотя бы один из векторов  или
или  нулевой, то также считают, что
нулевой, то также считают, что  .
.
Векторы  называют перпендикулярными, если угол между ними равен 90°. Записывают:
называют перпендикулярными, если угол между ними равен 90°. Записывают: 
На рисунке 42.3 изображена треугольная призма, основанием которой является правильный треугольник, а боковое ребро перпендикулярно плоскости основания.
Имеем:

Определение. Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними.
Скалярное произведение векторов  обозначают так:
обозначают так:  Имеем:
Имеем: 
Если хотя бы один из векторов  нулевой, то очевидно, что
нулевой, то очевидно, что  Скалярное произведение
Скалярное произведение  называют скалярным квадратом вектора
называют скалярным квадратом вектора  и обозначают
и обозначают  .
.
Скалярный квадрат вектора равен квадрату его модуля, то есть  .
.
Теорема 42.1. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны. Например, для векторов, изображенных на рисунке 42.3, имеем: 
Теорема 42.2. Скалярное произведение векторов  и
и  можно вычислить по формуле
можно вычислить по формуле
Теорема 42.3. Косинус угла между ненулевыми векторами  можно вычислить по формуле
можно вычислить по формуле
Некоторые свойства скалярного произведения векторов аналогичны соответствующим свойствам произведения чисел. Например, для любых векторов  и любого числа
и любого числа  справедливы равенства:
справедливы равенства:
Эти свойства вместе со свойствами сложения векторов и умножения вектора на число позволяют преобразовывать выражения, содержащие скалярное произведение векторов, по правилам преобразования алгебраических выражений. Например,

Пример №51
Основанием призмы является равнобедренный треугольник АВС (АВ =АС). Боковое ребро  образует равные углы с ребрами АВ и АС (рис. 42.4). Докажите, что
образует равные углы с ребрами АВ и АС (рис. 42.4). Докажите, что  .
.
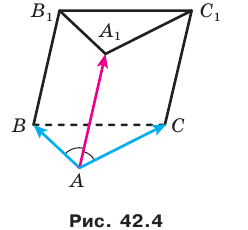
Решение:
Пусть  . С учетом условия можно записать:
. С учетом условия можно записать:  . Найдем скалярное произведение векторов
. Найдем скалярное произведение векторов  . Имеем:
. Имеем: 
Запишем: 

Поскольку  , то рассматриваемое скалярное произведение равно 0. Следовательно,
, то рассматриваемое скалярное произведение равно 0. Следовательно, 
Напомню:
Расстояние между точками
Расстояние между двумя точками  можно найти по формуле
можно найти по формуле 
Координаты середины отрезка
Каждая координата середины отрезка равна полусумме соответствующих координат его концов.
Взаимное расположение двух векторов
Два ненулевых вектора называют коллинеарными, если они лежат на параллельных прямых или на одной прямой. Нулевой вектор считают коллинеарным любому вектору.
Равенство векторов
Два ненулевых вектора называют равными, если их модули равны и они сонаправлены. Любые два нулевых вектора равны.
Координаты вектора
Если точки  — соответственно начало и конец вектора
— соответственно начало и конец вектора  , то числа
, то числа  равны соответственно первой, второй и третьей координатам вектора
равны соответственно первой, второй и третьей координатам вектора 
Модуль вектора
Если вектор  имеет координаты
имеет координаты 
Действия над векторами
Для любых трех точек А , В и С выполняется равенство 
Разностью векторов  называют такой вектор
называют такой вектор  , сумма которого с вектором
, сумма которого с вектором  равна вектору
равна вектору  .
.
Для любых трех точек О, А и В выполняется равенство  . Произведением ненулевого вектора
. Произведением ненулевого вектора  и числа
и числа  , отличного от нуля, называют такой вектор
, отличного от нуля, называют такой вектор  , что: 1)
, что: 1)  2) если
2) если  если
если 
Если векторы  коллинеарны и
коллинеарны и  , то существует такое число
, то существует такое число  , что
, что  Произведение
Произведение  обозначают
обозначают  и называют вектором, противоположным вектору
и называют вектором, противоположным вектору  .
.
Скалярным произведением двух векторов называют произведение их модулей и косинуса угла между ними. Скалярное произведение двух ненулевых векторов равно нулю тогда и только тогда, когда эти векторы перпендикулярны. Если координаты векторов  равны соответственно
равны соответственно  то:
то:
- Множества
- Рациональные уравнения
- Рациональные неравенства и их системы
- Геометрические задачи и методы их решения
- Предел и непрерывность числовой функции одной переменной
- Функции, их свойства и графики
- Параллельность в пространстве
- Перпендикулярность в пространстве
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.
Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:
Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.
Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора:
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма
Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и
.
Сумма векторов:
Разность векторов:
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:
Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и
. Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и
:
2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.
Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
:
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму.
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.
Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и
, а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.
Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
Для точки M:
То есть A + C + D = 0.
Для точки N:
Аналогично для точки K:
Получили систему из трех уравнений:
.
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
;
.
Выразим C и B через A и подставим в третье уравнение:
.
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.
Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.
Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Упростим систему:
.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 🙂
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать “параллелепипед”.
Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Итак, AA1 = √3
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор
.
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей),
— нормаль к плоскости α.
Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат
Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD =
. Высота параллелепипеда AA1 =
. Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:
Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
Спасибо за то, что пользуйтесь нашими статьями.
Информация на странице «Векторы в пространстве и метод координат» подготовлена нашими авторами специально, чтобы помочь вам в освоении предмета и подготовке к ЕГЭ и ОГЭ.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из данного раздела.
Публикация обновлена:
08.05.2023
-
Поверхности и линии первого порядка.
Начать изучение
-
Параметрические уравнения прямой и плоскости.
Начать изучение
-
Прямая линия на плоскости.
Начать изучение
-
Векторные уравнения плоскости и прямой.
Начать изучение
-
Параллельность плоскостей и прямых на плоскости.
Начать изучение
-
Уравнения прямой в пространстве.
Начать изучение
Поверхности и линии первого порядка.
Уравнение первой степени, или линейное уравнение, связывающее координаты точки в пространстве, имеет вид
$$
Ax+By+Cz+D = 0,label{ref1}
$$
причем предполагается, что коэффициенты при переменных не равны нулю одновременно, то есть (A^{2}+B^{2}+C^{2} neq 0). Аналогично, линейное уравнение, связывающее координаты точки на плоскости, — это уравнение
$$
Ax+By+C = 0,label{ref2}
$$
при условии (A^{2}+B^{2} neq 0).
В школьном курсе доказывается, что в декартовой прямоугольной системе координат уравнения eqref{ref1} и eqref{ref2} определяют соответственно плоскость и прямую линию на плоскости. Из теорем о порядке алгебраических линий и поверхностей следует, что то же самое верно и в общей декартовой системе координат. Точнее, имеют место следующие теоремы.
Теорема 1.
В общей декартовой системе координат в пространстве каждая плоскость может быть задана линейным уравнением
$$
Ax+By+Cz+D = 0.nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат определяет плоскость.
Теорема 2.
В общей декартовой системе координат на плоскости каждая прямая может быть задана линейным уравнением
$$
Ax+By+C = 0,nonumber
$$
Обратно, каждое линейное уравнение в общей декартовой системе координат на плоскости определяет прямую.
Эти теоремы полностью решают вопрос об уравнениях плоскости и прямой линии на плоскости. Однако ввиду важности этих уравнений мы рассмотрим их в других формах. При этом будут получены независимые доказательства теорем этого пункта.
Параметрические уравнения прямой и плоскости.
Прямая линия (на плоскости или в пространстве) полностью определена, если на ней задана точка (M_{0}) и задан ненулевой вектор (boldsymbol{a}), параллельный этой прямой. Разумеется, и точку, и вектор можно выбрать по-разному, но мы будем считать, что они как-то выбраны, и называть их начальной точкой и направляющим вектором. Аналогично, плоскость задается точкой и двумя неколлинеарными векторами, ей параллельными, — начальной точкой и направляющими векторами плоскости.
Мы будем предполагать, что задана декартова система координат в пространстве (или на плоскости, если мы изучаем прямую в планиметрии). Это, в частности, означает, что каждой точке сопоставлен ее радиус-вектор относительно начала координат.
Пусть дана прямая. Обозначим через (boldsymbol{r}_{0}) и (boldsymbol{a}) соответственно радиус-вектор ее начальной точки (M_{0}) и направляющий вектор. Рассмотрим некоторую точку (M) с радиус-вектором (boldsymbol{r}) (рис. 6.1).

Вектор (overrightarrow{M_{0}M} = boldsymbol{r}-boldsymbol{r}_{0}), начало которого лежит на прямой, параллелен прямой тогда и только тогда, когда (M) также лежит на прямой. В этом и только этом случае для точки (M) найдется такое число (t), что
$$
boldsymbol{r}-boldsymbol{r}_{0} = tboldsymbol{a}.label{ref3}
$$
Наоборот, какое бы число мы ни подставили в формулу eqref{ref3} в качестве (t), вектор (boldsymbol{r}) в этой формуле определит некоторую точку на прямой.
Уравнение eqref{ref3} называется векторным параметрическим уравнением прямой, а переменная величина (t), принимающая любые вещественные значения, называется параметром.
Векторное параметрическое уравнение выглядит одинаково и в планиметрии, и в стереометрии, но при разложении по базису оно сводится к двум или трем скалярным уравнениям, смотря по тому, сколько векторов составляют базис.
Рассмотрим прямую в пространстве. Пусть ((x, y, z)) и ((x_{0}, y_{0}, z_{0})) — координаты точек (M) и (M_{0}), соответственно, а вектор (boldsymbol{a}) имеет компоненты ((a_{1}, a_{2}, a_{3})). Тогда, раскладывая по базису обе части уравнения eqref{ref3}, мы получим
$$
x-x_{0} = a_{1}t, y-y_{0} = a_{2}t, z-z_{0} = a_{3}t.label{ref4}
$$
Для прямой на плоскости мы получаем, аналогично,
$$
x-x_{0} = a_{1}t, y-y_{0} = a_{2}t.label{ref5}
$$
Уравнения eqref{ref4} или eqref{ref5} называются параметрическими уравнениями прямой.
Получим теперь параметрические уравнения плоскости. Обозначим через (boldsymbol{p}) и (boldsymbol{q}) ее направляющие векторы, а через (boldsymbol{r}_{0}) — радиус-вектор ее начальной точки (M_{0}). Пусть точка (M) с радиус-вектором (boldsymbol{r}) — произвольная точка пространства (рис. 6.2).

Вектор (overrightarrow{M_{0}M} = boldsymbol{r}-boldsymbol{r}_{0}), начало которого лежит на плоскости, параллелен ей тогда и только тогда, когда его конец (M) также лежит на плоскости. Так как (boldsymbol{p}) и (boldsymbol{q}) не коллинеарны, в этом и только этом случае (boldsymbol{r}-boldsymbol{r}_{0}) может быть по ним разложен. Поэтому, если точка (M) лежит в плоскости (и только в этом случае), найдутся такие числа (t_{1}) и (t_{2}), что
$$
boldsymbol{r}-boldsymbol{r}_{0} = t_{1}boldsymbol{p}+t_{2}boldsymbol{q}.label{ref6}
$$
Это уравнение называется параметрическим уравнением плоскости. Каждой точке плоскости оно сопоставляет значения двух параметров (t_{1}) и (t_{2}). Наоборот, какие бы числа мы ни подставили как значения (t_{1}) и (t_{2}), уравнение eqref{ref6} определит некоторую точку плоскости.
Пусть ((x, y, z)) и ((x_{0}, y_{0}, z_{0})) — координаты точек (M) и (M_{0}) соответственно, а векторы (boldsymbol{p}) и (boldsymbol{q}) имеют компоненты ((p_{1}, p_{2}, p_{3})) и ((q_{1}, q_{2}, q_{3})). Тогда, раскладывая по базису обе части уравнения eqref{ref6}, мы получим параметрические уравнения плоскости
$$
x-x_{0} = t_{1}p_{1}+t_{2}q_{1}, y-y_{0} = t_{1}p_{2}+t_{2}q_{2}, z-z_{0} = t_{1}p_{3}+t_{2}q_{3}.label{ref7}
$$
Отметим, что начальная точка и направляющий вектор прямой образуют на ней ее внутреннюю декартову систему координат. Значение параметра (t), соответствующее какой-то точке, является координатой этой точки во внутренней системе координат. Точно так же на плоскости начальная точка и направляющие векторы составляют внутреннюю систему координат, а значения параметров, соответствующие точке, — это ее координаты в этой системе.
Прямая линия на плоскости.
Параметрическое уравнение прямой утверждает, что точка (M) лежит на прямой тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки (M_{0}) коллинеарна направляющему вектору (boldsymbol{a}). Пусть в некоторой общей декартовой системе координат на плоскости заданы координаты точек и вектора (M(x, y)), (M_{0}(x_{0}, y_{0})), (boldsymbol{a}(a_{1}, a_{2})). Тогда условие коллинеарности может быть записано в виде равенства
$$
begin{vmatrix}
x-x_{0}& y-y_{0}\
a_{1}& a_{2}
end{vmatrix}
= 0.label{ref8}
$$
Поэтому мы можем сформулировать следующее утверждение.
Утверждение 1.
В любой декартовой системе координат на плоскости уравнение прямой с начальной точкой (M_{0}(x_{0}, y_{0})) и направляющим вектором (boldsymbol{a}(a_{1}, a_{2})) может быть записано в виде eqref{ref8}.
Уравнение eqref{ref8} линейное. Действительно, после преобразования оно принимает вид (a_{2}x-a_{1}y+(a_{1}y_{0}-a_{2}x_{0}) = 0), то есть (Ax+By+C = 0), где (A = a_{2}), (B = -a_{1}) и (C = a_{1}y_{0}-a_{2}x_{0}).
С другой стороны, при заданной системе координат для произвольного линейного многочлена (Ax+By+C), (A^{2}+B^{2} neq 0), найдутся такая точка (M_{0}(x_{0}, y_{0})) и такой вектор (boldsymbol{a}(a_{1}, a_{2})), что
$$
Ax+By+C =
begin{vmatrix}
x-x_{0}& y-y_{0}\
a_{1}& a_{2}
end{vmatrix}.label{ref9}
$$
Действительно, выберем числа (x_{0}) и (y_{0}) так, чтобы (Ax_{0}+By_{0}+C = 0). В качестве таких чисел можно взять, например,
$$
x_{0} = frac{-AC}{A^{2}+B^{2}}, y_{0} = frac{-BC}{A^{2}+B^{2}}.label{ref10}
$$
Если (C = -Ax_{0}-By_{0}), то (Ax+By+C = A(x-x_{0})+B(y-y_{0})), то есть выполнено равенство eqref{ref9} при (a_{2} = A), (a_{1} = -B). Итак, мы получили следующее утверждение.
Утверждение 2.
Вектор с координатами ((-B, A)) можно принять за направляющий вектор прямой с уравнением eqref{ref2} в общей декартовой системе координат, а точку eqref{ref10} за начальную точку.
Следствие.
Если система координат декартова прямоугольная, то вектор (boldsymbol{n}(A, B)) перпендикулярен прямой с уравнением eqref{ref1}.
Действительно, в этом случае ((boldsymbol{a}, boldsymbol{n}) = -BA+AB = 0).
Пусть в уравнении прямой (Ax+By+C = 0) коэффициент (B) отличен от нуля. Это означает, что отлична от нуля первая компонента направляющего вектора, и прямая не параллельна оси ординат. В этом случае уравнение прямой можно представить в виде
$$
y = kx+b,label{ref11}
$$
где (k = -A/B), а (b = -C/B). Мы видим, что к равно отношению компонент направляющего вектора: (k = a_{2}/a_{1}) (рис. 6.3).

Определение.
Отношение компонент направляющего вектора (a_{2}/a_{1}) называется угловым коэффициентом прямой.
Угловой коэффициент прямой в декартовой прямоугольной системе координат равен тангенсу угла, который прямая образует с осью абсцисс. Угол этот отсчитывается от оси абсцисс в направлении кратчайшего поворота от (boldsymbol{e}_{1}) к (boldsymbol{e}_{2}) (рис. 6.4).

Положив (x = 0) в уравнении eqref{ref11}, получаем (y = b). Это означает, что свободный член уравнения (b) является ординатой точки пересечения прямой с осью ординат.
Если же в уравнении прямой (B = 0) и ее уравнение нельзя представить в виде eqref{ref11}, то обязательно (A neq 0). В этом случае прямая параллельна оси ординат и ее уравнению можно придать вид (x = x_{0}), где (x_{0} = -C/A) — абсцисса точки пересечения прямой с осью абсцисс.
Векторные уравнения плоскости и прямой.
Параметрическое уравнение плоскости утверждает, что точка (M) лежит на плоскости тогда и только тогда, когда разность ее радиус-вектора и радиус-вектора начальной точки (M_{0}) компланарна направляющим векторам (boldsymbol{p}) и (boldsymbol{q}). Эту компланарность можно выразить и равенством
$$
(boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{p}, boldsymbol{q}) = 0.label{ref12}
$$
Вектор (boldsymbol{n} = [boldsymbol{p}, boldsymbol{q}]) — ненулевой вектор, перпендикулярный плоскости. Используя его, мы можем записать уравнение eqref{ref12} в виде
$$
(boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{n}) = 0.label{ref13}
$$
Уравнения eqref{ref12} и eqref{ref13} называют векторными уравнениями плоскости. Им можно придать форму, в которую не входит радиус-вектор начальной точки. Например, положив в eqref{ref13} (D = -(boldsymbol{r}_{0}, boldsymbol{n})), получим
$$
(boldsymbol{r}, boldsymbol{n})+D = 0.label{ref14}
$$
Для прямой на плоскости можно также написать векторные уравнения, аналогичные eqref{ref13} и eqref{ref14},
$$
(boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{n}) = 0 mbox{или} (boldsymbol{r}, boldsymbol{n})+C = 0.nonumber
$$
Первое из них выражает тот факт, что вектор (boldsymbol{r}-boldsymbol{r}_{0}) перпендикулярен ненулевому вектору (boldsymbol{n}), перпендикулярному направляющему вектору (boldsymbol{a}), и потому коллинеарен (boldsymbol{a}).
Утверждение 3.
Пусть (x, y, z) — компоненты вектора (boldsymbol{r}) в общей декартовой системе координат. Тогда скалярное произведение ((boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{n})) при (boldsymbol{n} neq 0) записывается линейным многочленом (Ax+By+Cz+D), где ((A^{2}+B^{2}+C^{2} neq 0)).
Обратно, для любого линейного многочлена найдутся такие векторы (boldsymbol{r}_{0}) и (boldsymbol{n} neq 0), что в заданной общей декартовой системе координат (Ax+By+Cz+D = (boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{n})).
Доказательство.
Первая часть предложения очевидна: подставим разложение вектора (boldsymbol{r}) по базису в данное скалярное произведение:
$$
(xboldsymbol{e}_{1}+yboldsymbol{e}_{2}+zboldsymbol{e}_{3}-boldsymbol{r}_{0}, boldsymbol{n}),nonumber
$$
раскроем скобки и получим многочлен (Ax+By+Cz+D), в котором (D = -(boldsymbol{r}_{0}, boldsymbol{n})) и
$$
A = (boldsymbol{e}_{1}, boldsymbol{n}), B = (boldsymbol{e}_{2}, boldsymbol{n}), C = (boldsymbol{e}_{3}, boldsymbol{n})label{ref15}
$$
(A), (B) и (C) одновременно не равны нулю, так как ненулевой вектор (boldsymbol{n}) не может быть ортогонален всем векторам базиса.
Для доказательства обратного утверждения найдем сначала вектор (boldsymbol{n}) из равенств eqref{ref15}, считая (A), (B) и (C) заданными. Из ранее доказанного утверждения 10 следует, что
$$
boldsymbol{n} = frac{A[boldsymbol{e}_{2}, boldsymbol{e}_{3}]}{(boldsymbol{e}_{1}, boldsymbol{e}_{2}, boldsymbol{e}_{3})}+frac{B[boldsymbol{e}_{3}, boldsymbol{e}_{1}]}{(boldsymbol{e}_{1}, boldsymbol{e}_{2}, boldsymbol{e}_{3})}+frac{C[boldsymbol{e}_{1}, boldsymbol{e}_{2}]}{(boldsymbol{e}_{1}, boldsymbol{e}_{2}, boldsymbol{e}_{3})}.label{ref16}
$$
Вектор (boldsymbol{r}_{0}) должен удовлетворять условию (D = -(boldsymbol{r}_{0}, boldsymbol{n})). Один из таких векторов можно найти в виде (boldsymbol{r}_{0} = lambda boldsymbol{n}). Подставляя, видим, что (-lambda(boldsymbol{n}, boldsymbol{n}) = D), откуда (boldsymbol{r}_{0} = -Dboldsymbol{n}/|boldsymbol{n}|^{2}).
Итак, мы нашли векторы (boldsymbol{n}) и (boldsymbol{r}_{0}) такие, что линейный многочлен записывается в виде
$$
x(boldsymbol{e}_{1}, boldsymbol{n})+y(boldsymbol{e}_{2}, boldsymbol{n})+z(boldsymbol{e}_{3}, boldsymbol{n})-(boldsymbol{r}_{0}, boldsymbol{n}),nonumber
$$
который совпадает с требуемым ((boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{n})).
Утверждение 4.
Если система координат декартова прямоугольная, то вектор с компонентами (A), (B), (C) является нормальным вектором для плоскости с уравнением (Ax+By+Cz+D = 0).
Доказательство.
Это сразу вытекает из формул eqref{ref15} и доказанного ранее утверждения о нахождении компонент в ортогональном базисе.
Рассмотрим вектор (boldsymbol{a} = alpha_{1}boldsymbol{e}_{1}+alpha_{1}boldsymbol{e}_{2}+alpha_{1}boldsymbol{e}_{3}) в общей декартовой системе координат (O, boldsymbol{e}_{1}, boldsymbol{e}_{2}, boldsymbol{e}_{3}). Очевидно, что ((boldsymbol{a}, boldsymbol{n}) = alpha_{1}(boldsymbol{e}_{1}, boldsymbol{n})+alpha_{2}(boldsymbol{e}_{2}, boldsymbol{n})+alpha_{3}(boldsymbol{e}_{3}, boldsymbol{n})). Теперь из формул eqref{ref15} следует, что
$$
(boldsymbol{a}, boldsymbol{n}) = Aalpha_{1}+Balpha_{2}+Calpha_{3}.nonumber
$$
(Заметьте, что в общей декартовой системе координат числа (A), (B), (C), вообще говоря, не являются координатами вектора (boldsymbol{n}), и скалярное произведение не записывается как сумма произведений одноименных компонент, но ((boldsymbol{a}, boldsymbol{n})) выглядит так же, как и в прямоугольных координатах.) Теперь очевидным становится следующее утверждение.
Утверждение 5.
Вектор (boldsymbol{a}) с компонентами (alpha_{1}, alpha_{2}, alpha_{3}) общей декартовой системе координат параллелен плоскости с уравнением (Ax+By+Cz+D = 0) тогда и только тогда, когда
$$
Aalpha_{1}+Balpha_{2}+Calpha_{3} = 0.label{ref17}
$$
Следствие.
Любые два неколлинеарных вектора, удовлетворяющие уравнению eqref{ref17}, можно принять за направляющие векторы плоскости.
Утверждение 5 нетрудно доказать и непосредственно, рассматривая координаты вектора, параллельного плоскости, как разности соответствующих координат двух точек, лежащих в плоскости.
Все, сказанное о плоскостях, почти без изменений может быть сказано и о прямых на плоскости. В частности, верно следующее утверждение.
Утверждение 6.
Вектор (boldsymbol{a}) с компонентами (alpha_{1}, alpha_{2}) в общей декартовой системе координат параллелен прямой с уравнением (Ax+By+C = 0) тогда и только тогда, когда
$$
Aalpha_{1}+Balpha_{2} = 0.label{ref18}
$$
Доказательство.
Действительно, (alpha_{1}, alpha_{2}), должны быть пропорциональны компонентам — (B), (A) направляющего вектора прямой.
Векторное уравнение прямой линии в пространстве может быть написано в виде
$$
[boldsymbol{r}-boldsymbol{r}_{0}, boldsymbol{a}] = 0.label{ref19}
$$
Здесь (boldsymbol{a}) — направляющий вектор прямой, а (boldsymbol{r}_{0}) — радиус-вектор ее начальной точки. В самом деле, это уравнение, как и векторное параметрическое, выражает коллинеарность векторов (boldsymbol{r}_{0}) и (boldsymbol{a}).
Параллельность плоскостей и прямых на плоскости.
Ниже, говоря о параллельных прямых или плоскостях, мы будем считать, что параллельные плоскости (или прямые) не обязательно различны, то есть что плоскость (прямая) параллельна самой себе.
Утверждение 7.
Прямые линии, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+C = 0, A_{1}x+B_{1}y+C_{1} = 0,nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число (lambda), что
$$
A_{1} = lambda A, B_{1} = lambda B.label{ref20}
$$
Прямые совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнения eqref{ref20} выполнено (с тем же (lambda)) равенство
$$
C_{1} = lambda C.label{ref21}
$$
Доказательство.
Первая часть предложения прямо следует из того, что векторы с компонентами ((-B, A)) и ((-B_{1}, A_{1})) — направляющие векторы прямых.
Докажем вторую часть. В равенствах eqref{ref20} и eqref{ref21} (lambda neq 0), так как коэффициенты в уравнении прямой одновременно нулю не равны. Поэтому, если эти равенства выполнены, уравнения эквивалентны и определяют одну и ту же прямую.
Обратно, пусть прямые параллельны. В силу первой части предложения их уравнения должны иметь вид (Ax+By+C = 0) и (lambda(Ax+By)+C_{1} = 0) при некотором (lambda). Если, кроме того, существует общая точка (M_{0}(x_{0}, y_{0})) обеих прямых, то (Ax_{0}+By_{0}+C = 0) и (lambda(Ax_{0}+By_{0})+C_{1} = 0). Вычитая одно равенство из другого, получаем (C_{1} = lambda C), как и требовалось.
Утверждение 8.
Плоскости, задаваемые в общей декартовой системе координат уравнениями
$$
Ax+By+Cz+D = 0, A_{1}x+B_{1}y+C_{1}z+D_{1} = 0nonumber
$$
параллельны тогда и только тогда, когда соответствующие коэффициенты в их уравнениях пропорциональны, то есть существует такое число (lambda), что
$$
A_{1} = lambda A, B_{1} = lambda B, C_{1} = lambda C.label{ref22}
$$
Плоскости совпадают в том и только том случае, когда их уравнения пропорциональны, то есть помимо уравнений eqref{ref22} выполнено (с тем же (lambda)) равенство
$$
D_{1} = lambda D.label{ref23}
$$
Доказательство.
Если плоскости параллельны, то их нормальные векторы (boldsymbol{n}) и (boldsymbol{n}_{1}) коллинеарны, и существует такое число (lambda), что (boldsymbol{n}_{1} = lambdaboldsymbol{n}). В силу уравнений eqref{ref15} (A_{1} = (boldsymbol{e}_{1}, boldsymbol{n}_{1}) = lambda(boldsymbol{e}_{1}, boldsymbol{n}) = lambda A). Аналогично доказываются и остальные равенства eqref{ref22}. Обратно, если равенства eqref{ref22} выполнены, то из формулы eqref{ref16} следует, что (boldsymbol{n}_{1} = lambdaboldsymbol{n}). Это доказывает первую часть предложения. Вторая его часть доказывается так же, как вторая часть предложения 7.
Условия eqref{ref20} выражают не что иное, как коллинеарность векторов с компонентами ((A, B)) и ((A_{1}, B_{1})). Точно так же условия eqref{ref22} означают коллинеарность векторов с компонентами ((A, B, C)) и ((A_{1}, B_{1}, C_{1})). Поэтому согласно ранее доказанным этому и этому утверждениям условие параллельности прямых на плоскости можно записать в виде
$$
begin{vmatrix}
A& B\
A_{1}& B_{1}
end{vmatrix}
= 0,label{ref24}
$$
а условие параллельности плоскостей — в виде
$$
begin{vmatrix}
B& C\
B_{1}& C_{1}
end{vmatrix} =
begin{vmatrix}
C& A\
C_{1}& A_{1}
end{vmatrix} =
begin{vmatrix}
A& B\
A_{1}& B_{1}
end{vmatrix}
= 0.label{ref25}
$$
Утверждению 7 можно придать чисто алгебраическую формулировку, если учесть, что координаты точки пересечения прямых — это решение системы, составленной из их уравнений.
Утверждение 9.
При условии eqref{ref24} система линейных уравнений
$$
Ax+By+C = 0, A_{1}x+B_{1}y+C_{1} = 0,nonumber
$$
не имеет решений или имеет бесконечно много решений (в зависимости от (C) и (C_{1}). В последнем случае система равносильна одному из составляющих ее уравнений. Если же
$$
begin{vmatrix}
A& B\
A_{1}& B_{1}
end{vmatrix}
neq 0.nonumber
$$
то при любых (C) и (C_{1}) система имеет единственное решение ((x, y)).
Уравнения прямой в пространстве.
Прямая линия в пространстве может быть задана как пересечение двух плоскостей и, следовательно, в общей декартовой системе координат определяется системой уравнений вида
$$
left{begin{array}{l}
Ax+By+Cz+D = 0,\
A_{1}x+B_{1}y+C_{1}z+D_{1} = 0.
end{array}right.label{ref26}
$$
Пересечение плоскостей — прямая линия тогда и только тогда, когда они не параллельны, что согласно eqref{ref25} означает, что хоть один из детерминантов отличен от нуля:
$$
begin{vmatrix}
B& C\
B_{1}& C_{1}
end{vmatrix}^{2} +
begin{vmatrix}
C& A\
C_{1}& A_{1}
end{vmatrix}^{2} +
begin{vmatrix}
A& B\
A_{1}& B_{1}
end{vmatrix}^{2}
neq 0.label{ref27}
$$
Разумеется, систему eqref{ref26} можно заменить на любую, ей эквивалентную. При этом прямая будет представлена как пересечение двух других проходящих через нее плоскостей.
Вспомним параметрические уравнения прямой eqref{ref4}. Допустим, что в них ни одна из компонент направляющего вектора не равна нулю. Тогда
$$
t = frac{x-x_{0}}{alpha_{1}}, t = frac{y-y_{0}}{alpha_{2}}, t = frac{z-z_{0}}{alpha_{3}},nonumber
$$
и мы получаем два равенства
$$
frac{y-y_{0}}{alpha_{2}} = frac{z-z_{0}}{alpha_{3}}, frac{x-x_{0}}{alpha_{1}} = frac{z-z_{0}}{alpha_{3}},label{ref28}
$$
или, в более симметричном виде,
$$
frac{x-x_{0}}{alpha_{1}} = frac{y-y_{0}}{alpha_{2}} = frac{z-z_{0}}{alpha_{3}},label{ref29}
$$
Уравнения eqref{ref28} представляют прямую как линию пересечения двух плоскостей, первая из которых параллельна оси абсцисс (в ее уравнение не входит переменная (x)), а вторая параллельна оси ординат.
Если обращается в нуль одна из компонент направляющего вектора, например, (alpha_{1}), то уравнения прямой принимают вид
$$
x = x_{0}, frac{y-y_{0}}{alpha_{2}} = frac{z-z_{0}}{alpha_{3}},label{ref30}
$$
Эта прямая лежит в плоскости (x = x_{0}) и, следовательно, параллельна плоскости (x = 0). Аналогично пишутся уравнения прямой, если в нуль обращается не (alpha_{1}), а другая компонента.
Когда равны нулю две компоненты направляющего вектора, например, (alpha_{1}) и (alpha_{2}), то прямая имеет уравнения
$$
x = x_{0}, y = y_{0}.label{ref31}
$$
Такая прямая параллельна одной из осей координат, в нашем случае — оси аппликат.
Важно уметь находить начальную точку и направляющий вектор прямой, заданной системой линейных уравнений eqref{ref26}. По условию eqref{ref27} один из детерминантов отличен от нуля. Допустим для определенности, что (AB_{1}-A_{1}B neq 0). В силу утверждения 9 при любом фиксированном (z) система уравнений будет иметь единственное решение ((x, y)), в котором (x) и (y), разумеется, зависят от (z). Они — линейные многочлены от (z): (x = alpha_{1}z+beta_{1}), (y = alpha_{2}z+beta_{2}).
Не будем доказывать этого, хотя это и не трудно сделать. Для ясности, заменяя (z) на (t), получаем параметрические уравнения прямой
$$
x = alpha_{1}t+beta_{1}, y = alpha_{2}t+beta_{2}, z = t.nonumber
$$
Первые две координаты начальной точки прямой (M_{0}(beta_{1}, beta_{2}, 0)) можно получить, решая систему eqref{ref26} при значении (z = 0).
Из параметрических уравнений видно, что в этом случае направляющий вектор имеет координаты ((alpha_{1}, alpha_{2}, 1)). Найдем его компоненты в общем виде. Если система координат декартова прямоугольная, векторы с компонентами ((A, B, C)) и (A_{1}, B_{1}, C_{1}) перпендикулярны соответствующим плоскостям, а потому их векторное произведение параллельно прямой eqref{ref26}, по которой плоскости пересекаются. Вычисляя векторное произведение в ортонормированном базисе, мы получаем компоненты направляющего вектора
$$
begin{vmatrix}
B& C\
B_{1}& C_{1}
end{vmatrix},
begin{vmatrix}
C& A\
C_{1}& A_{1}
end{vmatrix},
begin{vmatrix}
A& B\
A_{1}& B_{1}
end{vmatrix}.label{ref32}
$$
Утверждение 10.
Вектор с компонентами eqref{ref32} есть направляющий вектор прямой с уравнениями eqref{ref26}, какова бы ни была декартова система координат.
Доказательство.
Согласно утверждению 5 каждый ненулевой вектор, компоненты которого ((alpha_{1}, alpha_{2}, alpha_{3})) удовлетворяют уравнению (Aalpha_{1}+Balpha_{2}+Calpha_{3} = 0), параллелен плоскости с уравнением (Ax+By+Cz+D = 0). Если, кроме того, он удовлетворяет уравнению (A_{1}alpha_{1}+B_{1}alpha_{2}+C_{1}alpha_{3} = 0), то он параллелен и второй плоскости, то есть может быть принят за направляющий вектор прямой. Вектор с компонентами eqref{ref32} ненулевой в силу неравенства eqref{ref27}. Непосредственно легко проверить, что его компоненты удовлетворяют обоим написанным выше условиям. На этом доказательство заканчивается.
