Метод координат в пространстве
Для того, чтобы использовать метод координат, надо хорошо знать формулы. Их три:
Главная формула — косинус угла φ между векторами a = (x1; y1; z1) и b = (x2; y2; z2):

На первый взгляд, выглядит угрожающе, но достаточно немного практики — и все будет работать великолепно.
Задача. Найти косинус угла между векторами a = (4; 3; 0) и b = (0; 12; 5).
Решение. Поскольку координаты векторов нам даны, подставляем их в первую формулу:

Задача. Составить уравнение плоскости, проходящей через точки M = (2; 0; 1), N = (0; 1; 1) и K = (2; 1; 0), если известно, что она не проходит через начало координат.
Решение. Общее уравнение плоскости: Ax + By + Cz + D = 0, но, поскольку искомая плоскость не проходит через начало координат — точку (0; 0; 0) — то положим D = 1. Поскольку эта плоскость проходит через точки M, N и K, то координаты этих точек должны обращать уравнение в верное числовое равенство.
Подставим вместо x, y и z координаты точки M = (2; 0; 1). Имеем:
A · 2 + B · 0 + C · 1 + 1 = 0 ⇒ 2A + C + 1 = 0;
Аналогично, для точек N = (0; 1; 1) и K = (2; 1; 0) получим уравнения:
A · 0 + B · 1 + C · 1 + 1 = 0 ⇒ B + C + 1 = 0;
A · 2 + B · 1 + C · 0 + 1 = 0 ⇒ 2A + B + 1 = 0;
Итак, у нас есть три уравнения и три неизвестных. Составим и решим систему уравнений:
Получили, что уравнение плоскости имеет вид: − 0,25x − 0,5y − 0,5z + 1 = 0.
Задача. Плоскость задана уравнением 7x − 2y + 4z + 1 = 0. Найти координаты вектора, перпендикулярного данной плоскости.
Решение. Используя третью формулу, получаем n = (7; − 2; 4) — вот и все!
Вычисление координат векторов
А что, если в задаче нет векторов — есть только точки, лежащие на прямых, и требуется вычислить угол между этими прямыми? Все просто: зная координаты точек — начала и конца вектора — можно вычислить координаты самого вектора.
Чтобы найти координаты вектора, надо из координат его конца вычесть координаты начала.
Эта теорема одинаково работает и на плоскости, и в пространстве. Выражение «вычесть координаты» означает, что из координаты x одной точки вычитается координата x другой, затем то же самое надо сделать с координатами y и z. Вот несколько примеров:
Задача. В пространстве расположены три точки, заданные своими координатами: A = (1; 6; 3), B = (3; − 1; 7) и C = (− 4; 3; − 2). Найти координаты векторов AB, AC и BC.
Рассмотрим вектор AB: его начало находится в точке A, а конец — в точке B. Следовательно, чтобы найти его координаты, надо из координат точки B вычесть координаты точки A:
AB = (3 − 1; − 1 − 6; 7 − 3) = (2; − 7; 4).
Аналогично, начало вектора AC — все та же точка A, зато конец — точка C. Поэтому имеем:
AC = (− 4 − 1; 3 − 6; − 2 − 3) = (− 5; − 3; − 5).
Наконец, чтобы найти координаты вектора BC, надо из координат точки C вычесть координаты точки B:
BC = (− 4 − 3; 3 − (− 1); − 2 − 7) = (− 7; 4; − 9).
Ответ: AB = (2; − 7; 4); AC = (− 5; − 3; − 5); BC = (− 7; 4; − 9)
Обратите внимание на вычисление координат последнего вектора BC: очень многие ошибаются, когда работают с отрицательными числами. Это касается переменной y: у точки B координата y = − 1, а у точки C y = 3. Получаем именно 3 − (− 1) = 4, а не 3 − 1, как многие считают. Не допускайте таких глупых ошибок!
Вычисление направляющих векторов для прямых
Если вы внимательно прочитаете задачу C2, то с удивлением обнаружите, что никаких векторов там нет. Там только прямые да плоскости.
Для начала разберемся с прямыми. Здесь все просто: на любой прямой найдутся хотя бы две различные точки и, наоборот, любые две различные точки задают единственную прямую.
Кто-нибудь понял, что написано в предыдущем абзаце? Я и сам не понял, поэтому объясню проще: в задаче C2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим так называемый для прямой:
Зачем нужен этот вектор? Дело в том, что — это угол между их направляющими векторами. Таким образом, мы переходим от непонятных прямых к конкретным векторам, координаты которых легко считаются. Насколько легко? Взгляните на примеры:
Задача. В кубе ABCDA1B1C1D1 проведены прямые AC и BD1. Найдите координаты направляющих векторов этих прямых.
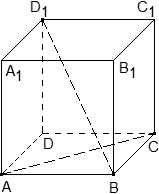
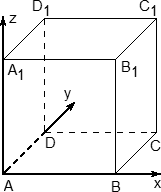
Поскольку длина ребер куба в условии не указана, положим AB = 1. Введем систему координат с началом в точке A и осями x, y, z, направленными вдоль прямых AB, AD и AA1 соответственно. Единичный отрезок равен AB = 1.
Теперь найдем координаты направляющего вектора для прямой AC. Нам потребуются две точки: A = (0; 0; 0) и C = (1; 1; 0). Отсюда получаем координаты вектора AC = (1 − 0; 1 − 0; 0 − 0) = (1; 1; 0) — это и есть направляющий вектор.
Теперь разберемся с прямой BD1. На ней также есть две точки: B = (1; 0; 0) и D1 = (0; 1; 1). Получаем направляющий вектор BD1 = (0 − 1; 1 − 0; 1 − 0) = (− 1; 1; 1).
Ответ: AC = (1; 1; 0); BD1 = (− 1; 1; 1)
Задача. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, проведены прямые AB1 и AC1. Найдите координаты направляющих векторов этих прямых.
Введем систему координат: начало в точке A, ось x совпадает с AB, ось z совпадает с AA1, ось y образует с осью x плоскость OXY, которая совпадает с плоскостью ABC.
Для начала разберемся с прямой AB1. Тут все просто: у нас есть точки A = (0; 0; 0) и B1 = (1; 0; 1). Получаем направляющий вектор AB1 = (1 − 0; 0 − 0; 1 − 0) = (1; 0; 1).
Теперь найдем направляющий вектор для AC1. Все то же самое — единственное отличие в том, что у точки C1 иррациональные координаты. Итак, A = (0; 0; 0), поэтому имеем:

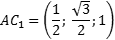
Небольшое, но очень важное замечание насчет последнего примера. Если начало вектора совпадает с началом координат, вычисления резко упрощаются: координаты вектора просто равны координатам конца. К сожалению, это верно лишь для векторов. Например, при работе с плоскостями присутствие на них начала координат только усложняет выкладки.
Вычисление нормальных векторов для плоскостей
Нормальные векторы — это не те векторы, у которых все в порядке, или которые чувствуют себя хорошо. По определению, нормальный вектор (нормаль) к плоскости — это вектор, перпендикулярный данной плоскости.
Другими словами, — это вектор, перпендикулярный любому вектору в данной плоскости. Наверняка вы встречали такое определение — правда, вместо векторов речь шла о прямых. Однако чуть выше было показано, что в задаче C2 можно оперировать любым удобным объектом — хоть прямой, хоть вектором.
Еще раз напомню, что всякая плоскость задается в пространстве уравнением Ax + By + Cz + D = 0, где A, B, C и D — некоторые коэффициенты. Не умаляя общности решения, можно полагать D = 1, если плоскость не проходит через начало координат, или D = 0, если все-таки проходит. В любом случае, координаты нормального вектора к этой плоскости равны n = (A; B; C).
Итак, плоскость тоже можно успешно заменить вектором — той самой нормалью. Всякая плоскость задается в пространстве тремя точками. Как найти уравнение плоскости (а следовательно — и нормали), мы уже обсуждали в самом начале статьи. Однако этот процесс у многих вызывает проблемы, поэтому приведу еще парочку примеров:
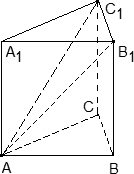
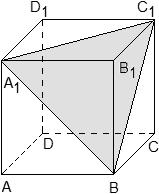
Задача. В кубе ABCDA1B1C1D1 проведено сечение A1BC1. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
Поскольку плоскость не проходит через начало координат, ее уравнение выглядит так: Ax + By + Cz + 1 = 0, т.е. коэффициент D = 1. Поскольку эта плоскость проходит через точки A1, B и C1, то координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 + 1 = 0 ⇒ C + 1 = 0 ⇒ C = − 1;
Аналогично, для точек B = (1; 0; 0) и C1 = (1; 1; 1) получим уравнения:
A · 1 + B · 0 + C · 0 + 1 = 0 ⇒ A + 1 = 0 ⇒ A = − 1;
A · 1 + B · 1 + C · 1 + 1 = 0 ⇒ A + B + C + 1 = 0;
Но коэффициенты A = − 1 и C = − 1 нам уже известны, поэтому остается найти коэффициент B:
B = − 1 − A − C = − 1 + 1 + 1 = 1.
Получаем уравнение плоскости: − A + B − C + 1 = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; − 1).
Задача. В кубе ABCDA1B1C1D1 проведено сечение AA1C1C. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
В данном случае плоскость проходит через начало координат, поэтому коэффициент D = 0, а уравнение плоскости выглядит так: Ax + By + Cz = 0. Поскольку плоскость проходит через точки A1 и C, координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 = 0 ⇒ C = 0;
Аналогично, для точки C = (1; 1; 0) получим уравнение:
A · 1 + B · 1 + C · 0 = 0 ⇒ A + B = 0 ⇒ A = − B;
Положим B = 1. Тогда A = − B = − 1, и уравнение всей плоскости имеет вид: − A + B = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; 0).
Вообще говоря, в приведенных задачах надо составлять систему уравнений и решать ее. Получится три уравнения и три переменных, но во втором случае одна из них будет свободной, т.е. принимать произвольные значения. Именно поэтому мы вправе положить B = 1 — без ущерба для общности решения и правильности ответа.
Координаты середины отрезка
Очень часто в задаче C2 требуется работать с точками, которые делят отрезок пополам. Координаты таких точек легко считаются, если известны координаты концов отрезка.
Итак, пусть отрезок задан своими концами — точками A = (xa; ya; za) и B = (xb; yb; zb). Тогда координаты середины отрезка — обозначим ее точкой H — можно найти по формуле:

Другими словами, координаты середины отрезка — это среднее арифметическое координат его концов.
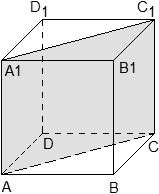
Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Точка K — середина ребра A1B1. Найдите координаты этой точки.
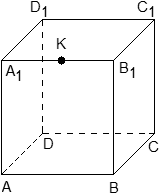
Поскольку точка K — середина отрезка A1B1, ее координаты равных среднему арифметическому координат концов. Запишем координаты концов: A1 = (0; 0; 1) и B1 = (1; 0; 1). Теперь найдем координаты точки K:

Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Найдите координаты точки L, в которой пересекаются диагонали квадрата A1B1C1D1.
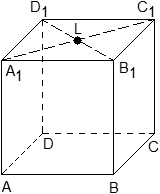
Из курса планиметрии известно, что точка пересечения диагоналей квадрата равноудалена от всех его вершин. В частности, A1L = C1L, т.е. точка L — это середина отрезка A1C1. Но A1 = (0; 0; 1), C1 = (1; 1; 1), поэтому имеем:
Красивая математика или как представить 7-ми мерный куб
Однажды от своих родственников я услышал такую фразу: “Люди на МехМате МГУ не могут быть нормальными, ведь они могут представить себе 7-ми мерное пространство!”
И когда я это услышал, мне тоже показалось, что это – что-то нереальное, невозможное. Но вот прошли года, и когда я снова услышал эту фразу, меня повергло в шок – я тоже могу представить 7-ми мерное пространство и не сломаться. Или я уже не из тех, кто может спокойно гулять по улицам?
Ответ, казалось бы, так прост и так несложен, но многие просто не задумывались над этим вопросом, и поэтому это кажется чем-то странным и нереальным.
Так вот, в данной статье я хочу задуматься, ответить и рассказать, что же за простой ответ скрывается под таким странным вопросом: “Что такое 7-ми мерное пространство?”
В данной статье я попытаюсь рассказать свое понимание многомерного пространства, как я представляю его в своей голове. Возможно, что-то может показаться немного нестрогим – так оно и есть, понятное дело, я пропускаю некоторые детали и пытаюсь писать максимально научно-популярным языком. Надеюсь, Вам понравится мое видение многомерного пространства и Вы почувствуете ту же красоту математики, которую я вижу в данной иллюстрации чего-то непонятного.
Я постараюсь описать некоторые детали с самых азов, вкратце, чтобы любой желающий мог бы разобраться в моих словах.
Оглавление
Выражаю благодарность @AnnRemi за помощь в редактировании и опускании на землю моих амбиций по статье.
Начало начал, или что такое вектор
Вектор: наверняка каждый сталкивался с таким понятием в школе, это не сложно и очень понятно.
Вектором называется направленный отрезок или просто луч, имеющий конкретную длину.
То есть если луч, как и прямая – понятие бесконечное и простирается вправо и влево в бесконечность, то вектор – понятие ограниченное длиной. Обычная стрелочка, нарисованная на бумаге – вектор. Линейкой мы можем измерить длину этой стрелочки, а направление “этой длины” показывает сама стрелка. Важно понимать, что нам не важно, откуда отложен наш вектор, из какой точки. Нужно знать только длину и направление. Обычно мы изображаем наш вектор в осях координат – так удобно находить его параметры.
 Вектор AB в осях координат
Вектор AB в осях координат
Для удобства мы отмечаем на оси Х и на оси У проекции наших точек. Теперь, чтобы посчитать длину нашего вектора достаточно воспользоваться Теоремой Пифагора
Направление, или угол наклона относительно оси Х легко посчитать, например, через тангенс, ведь мы знаем длины обоих катетов треугольника
Понятие радиус-вектора
Как мы уже увидели, в векторе нам важны только две вещи: длина и направление, так зачем его рисовать где-то в середине нашей координатной плоскости. Давайте сместим наш вектор к началу оси координат. Тогда нам надо будет хранить только координаты конца вектора – а координаты начала вектора у нас будут нулевыми.
 Смещенная ось координат
Смещенная ось координат
Так теперь надо будет меньше мучаться – храним в векторе просто координаты его конца.
Такие вектора называются в школе радиус-векторами, но в дальнейшем мы будем все вектора брать радиус-векторами, ведь, как мы помним, все вектора имеющие одно направление и одну длину – одинаковые, один и тот же вектор, так почему бы нам не взять тот, который удобнее всего записывается.
Трехмерный вектор
Если мы уже разобрались, что такое вектор на плоскости – давайте перейдем к вектору в трехмерном пространстве – в объемном мире.
Достаточно просто представить себе стрелку в объеме – достаточно вспомнить, как Вы что-то измеряли рулеткой. Прислонили конец к шкафу, другой к полу, и померили его диагональ. Ну или не шкаф. каждому свое. Но точно можно сказать, что такое трехмерный вектор.
Но давайте немного формулизируем то, что мы поняли. Представим трехмерные координаты и в них наш радиус-вектор AB.
 Трехмерный вектор AB
Трехмерный вектор AB
Понятно, что нам теперь совсем не хватит двух координат для описания вектора AB. Так что давайте добавим третью координату, просто дописав ее в конце.
Хммм. интересно, а по какому признаку мы можем вот так просто приписывать координаты? Может, можно просто так добить вектор до семимерного? Ну в принципе, нас никто остановить не может, и мы именно так и поступим, но сначала немного окунемся в линейную алгебру.
Базис в пространстве
Базис — упорядоченный набор векторов в векторном пространстве, такой, что любой вектор этого пространства может быть единственным образом представлен в виде линейной комбинации векторов из этого набора.
Линейная комбинация – это сумма некоторого набора элементов множества с допустимыми коэффициентами.
Также я собираюсь использовать в дальнейшем удобное следствие определения базиса: мы можем расширять наш базис с помощью векторов, линейно независимых с базисными.
Что значит расширить базис? Добавить еще один вектор, тем самым расширяя наше пространство еще в одном направлении.
Выше мы уже научились строить трехмерное пространство – просто объемный мир, в котором мы живем. Давайте попробуем расширить наш базис. Самым очевидным расширением базиса будет добавление времени, как еще одного параметра. То есть четырехмерное измерение – это объемная жизнь с привязкой ко времени. Ну разве это не похоже на обычную жизнь человека? То есть все это время мы жили в четырехмерном пространстве, а не трехмерном.
И, как не сложно заметить, время линейно независимо от объема, то есть наше расширение базиса вполне корректно.
7ми мерное пространство и почему только 7ми?
Как нам представить 5ти мерное пространство? Но мы же уже сказали, что на самом деле пространство – это то, что его задает – базис. То есть давайте теперь мыслить о пространстве, как о наборе параметров каждой его точки. Например для трехмерного объекта мы помним 3 координаты в пространстве – по x, y, z. И у нас это не вызывает диссонанса.
Давайте к координатам припишем еще и время, в которое у нас наблюдалась данное расположение тел. Например, у нас катится шар и мы следим за положением его центра. В момент времени 0 шар покоился. В 0,0. 01 он уже сместился. В момент времени 9. 9,0 он уже находится в совершенно другом месте. Но зачем нам так думать? Пусть эта точка шара существует одновременно везде, где проехался шар, только мы будем помнить, что в каждой точке мы еще приписываем время, когда шар был именно в данной позиции. Вот Вам и 4х мерное пространство – не сложно.
Казалось, так можно навесить еще какие-то параметры, такие как скорость ветра, влажность воздуха, сила трения и так далее, но давайте не будем извращаться и перейдем к более жизненному понятию.
Допустим у нас есть разные гаечки (прошу прощения, если я ошибусь в параметрах или названиях, я совсем не инженер). Для удобной фасовки и продажи гаек надо распределить их на группы одинаковых. Но как мы будем их отличать? Давайте запишем какой-то набор параметров (не претендующий на правильность):
Сплав метала гайки
Внутреннее сечение гайки
Внешняя форма гайки
Направление резьбы гайки
Максимальная нагрузка на гайку
Самозажимающаяся ли гайка?
Максимальная температура, при которой гайка выдерживает достаточную нагрузку
Понятно, что таких параметров может быть сколь угодно много. Но мы остановимся на 7ми – именно столько заявлено в заголовке статьи. Важно помнить! каждый параметр обязан быть независим от любого предыдущего. В нашем случае это условие выполняется: направление резьбы никак не зависит от сплава метала или от внутреннего сечения гайки. И так с каждым из параметров.
То есть только что мы создали свой, очень странный базис, где элементами нашего пространства выступают гайки, и мы их можем удобно расфасовать. Это и есть элементарное представление нашего 7ми и не только 7ми, но и большего, пространства.
Пространство – не куб!
В заголовке статьи я обещал куб, но пока говорил только о пространстве. Давайте определим, что же такое куб.
Например, в 2х мерном пространстве куб, очевидно,- это квадрат. То есть объект с точками вершинами:
В трехмерном пространстве куб – есть куб. С координатами:
Как мы заметили, в двумерном пространстве у куба 4 = 2^2 вершин, в трехмерном 8 = 2^3. Совпадение? Маловероятно. Ну и правильно, ведь из простейшей комбинаторики мы помним, что количество вершин равно 2^n для n-мерного куба. Ведь мы либо берем каждый из базисных n векторов, либо нет.
Тогда для построение 7ми или n-мерного куба нам достаточно взять точки с фиксированными координатами (0 или a) по каждой из осей.
Интересный факт
Именно из-за удобства понимания и описания n-мерного куба мы меряем любую n-мерную поверхность таким способом. Площадь квартиры с помощью квадратных метров, длину прямой в метрах, объем в кубических метрах. Это все кубы разной размерности. И в математике нам очень удобно оперировать именно такими понятиями. Примерно так мы определяем меру множества, которая очень важна для теории интегралов, теории вероятностей, теории меры и очень много где еще.
Послесловие
Как Вы, наверное, заметили, я привожу совсем иное понимание многомерного куба, в отличие от общепринятого.
Не то, чтобы красивые картинки многомерных кубов не вызывали у меня восхищения – совсем нет, но в этом есть что-то нереальное, непонятное и неприложимое. Я совсем не претендую на прикладное значение сортировки гаек, но мне кажется довольно захватывающим такое представление многомерности: как что-то такое далекое может быть таким емким.
4х мерный куб – Тессеракт
На самом деле я просто не имею настолько развитого пространственного воображения: я не понимаю, как можно визуализировать 4х, 5ти и более мерный куб на 2D картинке.
Также такая иллюстрация не позволяет представить, как увеличить пространство еще в одном направлении. Так что именно данная тема не рассматривается в моей статье, но, если Вас заинтересовал Тессеракт, есть огромная куча других, очень интересных, статей, описывающих его построение и даже расширение.
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.

Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:
Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.

Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора.
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма

Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и
.
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:

Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и
. Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и
:

2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.

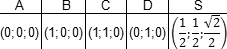
Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму:
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
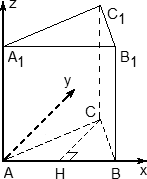
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.

Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и
, а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.

Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
То есть A + C + D = 0.
Аналогично для точки K:
Получили систему из трех уравнений:
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
Выразим C и B через A и подставим в третье уравнение:
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.

Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.

Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 🙂
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать “параллелепипед”.

Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор
.
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей),
— нормаль к плоскости α.

Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат

Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD =
. Высота параллелепипеда AA1 =
. Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:

Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
[spoiler title=”источники:”]
http://habr.com/ru/post/542450/
http://ege-study.ru/ru/ege/materialy/matematika/vektory-v-prostranstve-i-metod-koordinat/
[/spoiler]
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.
Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:
Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.
Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора:
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма
Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и
.
Сумма векторов:
Разность векторов:
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:
Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и
. Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и
:
2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.
Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
:
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму.
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.
Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и
, а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.
Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
Для точки M:
То есть A + C + D = 0.
Для точки N:
Аналогично для точки K:
Получили систему из трех уравнений:
.
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
;
.
Выразим C и B через A и подставим в третье уравнение:
.
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.
Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.
Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Упростим систему:
.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 🙂
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать “параллелепипед”.
Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Итак, AA1 = √3
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор
.
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей),
— нормаль к плоскости α.
Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат
Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD =
. Высота параллелепипеда AA1 =
. Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:
Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
Спасибо за то, что пользуйтесь нашими статьями.
Информация на странице «Векторы в пространстве и метод координат» подготовлена нашими авторами специально, чтобы помочь вам в освоении предмета и подготовке к ЕГЭ и ОГЭ.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из данного раздела.
Публикация обновлена:
08.05.2023
Метод координат в пространстве
30 мая 2011
Для того, чтобы использовать метод координат, надо хорошо знать формулы. Их три:
-
Главная формула — косинус угла φ между векторами a = (x1; y1; z1) и b = (x2; y2; z2):
- Уравнение плоскости в трехмерном пространстве: Ax + By + Cz + D = 0, где A, B, C и D — действительные числа, причем, если плоскость проходит через начало координат, D = 0. А если не проходит, то D = 1.
- Вектор, перпендикулярный к плоскости Ax + By + Cz + D = 0, имеет координаты: n = (A; B; C).
На первый взгляд, выглядит угрожающе, но достаточно немного практики — и все будет работать великолепно.
Задача. Найти косинус угла между векторами a = (4; 3; 0) и b = (0; 12; 5).
Решение. Поскольку координаты векторов нам даны, подставляем их в первую формулу:
![]()
Задача. Составить уравнение плоскости, проходящей через точки M = (2; 0; 1), N = (0; 1; 1) и K = (2; 1; 0), если известно, что она не проходит через начало координат.
Решение. Общее уравнение плоскости: Ax + By + Cz + D = 0, но, поскольку искомая плоскость не проходит через начало координат — точку (0; 0; 0) — то положим D = 1. Поскольку эта плоскость проходит через точки M, N и K, то координаты этих точек должны обращать уравнение в верное числовое равенство.
Подставим вместо x, y и z координаты точки M = (2; 0; 1). Имеем:
A · 2 + B · 0 + C · 1 + 1 = 0 ⇒ 2A + C + 1 = 0;
Аналогично, для точек N = (0; 1; 1) и K = (2; 1; 0) получим уравнения:
A · 0 + B · 1 + C · 1 + 1 = 0 ⇒ B + C + 1 = 0;
A · 2 + B · 1 + C · 0 + 1 = 0 ⇒ 2A + B + 1 = 0;
Итак, у нас есть три уравнения и три неизвестных. Составим и решим систему уравнений:
Получили, что уравнение плоскости имеет вид: − 0,25x − 0,5y − 0,5z + 1 = 0.
Задача. Плоскость задана уравнением 7x − 2y + 4z + 1 = 0. Найти координаты вектора, перпендикулярного данной плоскости.
Решение. Используя третью формулу, получаем n = (7; − 2; 4) — вот и все!
Вычисление координат векторов
А что, если в задаче нет векторов — есть только точки, лежащие на прямых, и требуется вычислить угол между этими прямыми? Все просто: зная координаты точек — начала и конца вектора — можно вычислить координаты самого вектора.
Чтобы найти координаты вектора, надо из координат его конца вычесть координаты начала.
Эта теорема одинаково работает и на плоскости, и в пространстве. Выражение «вычесть координаты» означает, что из координаты x одной точки вычитается координата x другой, затем то же самое надо сделать с координатами y и z. Вот несколько примеров:
Задача. В пространстве расположены три точки, заданные своими координатами: A = (1; 6; 3), B = (3; − 1; 7) и C = (− 4; 3; − 2). Найти координаты векторов AB, AC и BC.
Рассмотрим вектор AB: его начало находится в точке A, а конец — в точке B. Следовательно, чтобы найти его координаты, надо из координат точки B вычесть координаты точки A:
AB = (3 − 1; − 1 − 6; 7 − 3) = (2; − 7; 4).
Аналогично, начало вектора AC — все та же точка A, зато конец — точка C. Поэтому имеем:
AC = (− 4 − 1; 3 − 6; − 2 − 3) = (− 5; − 3; − 5).
Наконец, чтобы найти координаты вектора BC, надо из координат точки C вычесть координаты точки B:
BC = (− 4 − 3; 3 − (− 1); − 2 − 7) = (− 7; 4; − 9).
Ответ: AB = (2; − 7; 4); AC = (− 5; − 3; − 5); BC = (− 7; 4; − 9)
Обратите внимание на вычисление координат последнего вектора BC: очень многие ошибаются, когда работают с отрицательными числами. Это касается переменной y: у точки B координата y = − 1, а у точки C y = 3. Получаем именно 3 − (− 1) = 4, а не 3 − 1, как многие считают. Не допускайте таких глупых ошибок!
Вычисление направляющих векторов для прямых
Если вы внимательно прочитаете задачу C2, то с удивлением обнаружите, что никаких векторов там нет. Там только прямые да плоскости.
Для начала разберемся с прямыми. Здесь все просто: на любой прямой найдутся хотя бы две различные точки и, наоборот, любые две различные точки задают единственную прямую…
Кто-нибудь понял, что написано в предыдущем абзаце? Я и сам не понял, поэтому объясню проще: в задаче C2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим так называемый направляющий вектор для прямой:
Зачем нужен этот вектор? Дело в том, что угол между двумя прямыми — это угол между их направляющими векторами. Таким образом, мы переходим от непонятных прямых к конкретным векторам, координаты которых легко считаются. Насколько легко? Взгляните на примеры:
Задача. В кубе ABCDA1B1C1D1 проведены прямые AC и BD1. Найдите координаты направляющих векторов этих прямых.
Поскольку длина ребер куба в условии не указана, положим AB = 1. Введем систему координат с началом в точке A и осями x, y, z, направленными вдоль прямых AB, AD и AA1 соответственно. Единичный отрезок равен AB = 1.
Теперь найдем координаты направляющего вектора для прямой AC. Нам потребуются две точки: A = (0; 0; 0) и C = (1; 1; 0). Отсюда получаем координаты вектора AC = (1 − 0; 1 − 0; 0 − 0) = (1; 1; 0) — это и есть направляющий вектор.
Теперь разберемся с прямой BD1. На ней также есть две точки: B = (1; 0; 0) и D1 = (0; 1; 1). Получаем направляющий вектор BD1 = (0 − 1; 1 − 0; 1 − 0) = (− 1; 1; 1).
Ответ: AC = (1; 1; 0); BD1 = (− 1; 1; 1)
Задача. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, проведены прямые AB1 и AC1. Найдите координаты направляющих векторов этих прямых.
Введем систему координат: начало в точке A, ось x совпадает с AB, ось z совпадает с AA1, ось y образует с осью x плоскость OXY, которая совпадает с плоскостью ABC.
Для начала разберемся с прямой AB1. Тут все просто: у нас есть точки A = (0; 0; 0) и B1 = (1; 0; 1). Получаем направляющий вектор AB1 = (1 − 0; 0 − 0; 1 − 0) = (1; 0; 1).
Теперь найдем направляющий вектор для AC1. Все то же самое — единственное отличие в том, что у точки C1 иррациональные координаты. Итак, A = (0; 0; 0), поэтому имеем:
![]()
Ответ: AB1 = (1; 0; 1);
![]()
Небольшое, но очень важное замечание насчет последнего примера. Если начало вектора совпадает с началом координат, вычисления резко упрощаются: координаты вектора просто равны координатам конца. К сожалению, это верно лишь для векторов. Например, при работе с плоскостями присутствие на них начала координат только усложняет выкладки.
Вычисление нормальных векторов для плоскостей
Нормальные векторы — это не те векторы, у которых все в порядке, или которые чувствуют себя хорошо. По определению, нормальный вектор (нормаль) к плоскости — это вектор, перпендикулярный данной плоскости.
Другими словами, нормаль — это вектор, перпендикулярный любому вектору в данной плоскости. Наверняка вы встречали такое определение — правда, вместо векторов речь шла о прямых. Однако чуть выше было показано, что в задаче C2 можно оперировать любым удобным объектом — хоть прямой, хоть вектором.
Еще раз напомню, что всякая плоскость задается в пространстве уравнением Ax + By + Cz + D = 0, где A, B, C и D — некоторые коэффициенты. Не умаляя общности решения, можно полагать D = 1, если плоскость не проходит через начало координат, или D = 0, если все-таки проходит. В любом случае, координаты нормального вектора к этой плоскости равны n = (A; B; C).
Итак, плоскость тоже можно успешно заменить вектором — той самой нормалью. Всякая плоскость задается в пространстве тремя точками. Как найти уравнение плоскости (а следовательно — и нормали), мы уже обсуждали в самом начале статьи. Однако этот процесс у многих вызывает проблемы, поэтому приведу еще парочку примеров:
Задача. В кубе ABCDA1B1C1D1 проведено сечение A1BC1. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
Поскольку плоскость не проходит через начало координат, ее уравнение выглядит так: Ax + By + Cz + 1 = 0, т.е. коэффициент D = 1. Поскольку эта плоскость проходит через точки A1, B и C1, то координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 + 1 = 0 ⇒ C + 1 = 0 ⇒ C = − 1;
Аналогично, для точек B = (1; 0; 0) и C1 = (1; 1; 1) получим уравнения:
A · 1 + B · 0 + C · 0 + 1 = 0 ⇒ A + 1 = 0 ⇒ A = − 1;
A · 1 + B · 1 + C · 1 + 1 = 0 ⇒ A + B + C + 1 = 0;
Но коэффициенты A = − 1 и C = − 1 нам уже известны, поэтому остается найти коэффициент B:
B = − 1 − A − C = − 1 + 1 + 1 = 1.
Получаем уравнение плоскости: − A + B − C + 1 = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; − 1).
Задача. В кубе ABCDA1B1C1D1 проведено сечение AA1C1C. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
В данном случае плоскость проходит через начало координат, поэтому коэффициент D = 0, а уравнение плоскости выглядит так: Ax + By + Cz = 0. Поскольку плоскость проходит через точки A1 и C, координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 = 0 ⇒ C = 0;
Аналогично, для точки C = (1; 1; 0) получим уравнение:
A · 1 + B · 1 + C · 0 = 0 ⇒ A + B = 0 ⇒ A = − B;
Положим B = 1. Тогда A = − B = − 1, и уравнение всей плоскости имеет вид: − A + B = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; 0).
Вообще говоря, в приведенных задачах надо составлять систему уравнений и решать ее. Получится три уравнения и три переменных, но во втором случае одна из них будет свободной, т.е. принимать произвольные значения. Именно поэтому мы вправе положить B = 1 — без ущерба для общности решения и правильности ответа.
Координаты середины отрезка
Очень часто в задаче C2 требуется работать с точками, которые делят отрезок пополам. Координаты таких точек легко считаются, если известны координаты концов отрезка.
Итак, пусть отрезок задан своими концами — точками A = (xa; ya; za) и B = (xb; yb; zb). Тогда координаты середины отрезка — обозначим ее точкой H — можно найти по формуле:
![]()
Другими словами, координаты середины отрезка — это среднее арифметическое координат его концов.
Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Точка K — середина ребра A1B1. Найдите координаты этой точки.
Поскольку точка K — середина отрезка A1B1, ее координаты равных среднему арифметическому координат концов. Запишем координаты концов: A1 = (0; 0; 1) и B1 = (1; 0; 1). Теперь найдем координаты точки K:
![]()
Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Найдите координаты точки L, в которой пересекаются диагонали квадрата A1B1C1D1.
Из курса планиметрии известно, что точка пересечения диагоналей квадрата равноудалена от всех его вершин. В частности, A1L = C1L, т.е. точка L — это середина отрезка A1C1. Но A1 = (0; 0; 1), C1 = (1; 1; 1), поэтому имеем:
![]()
Ответ: L = (0,5; 0,5; 1)
Смотрите также:
- Введение системы координат

- Четырехугольная пирамида в задаче C2
- В 2012 году ЕГЭ по математике станет двухуровневым?

- Сводный тест по задачам B12 (1 вариант)
- Симметрия корней и оптимизация ответов в тригонометрии
- ЕГЭ 2022, задание 6. Касательная и уравнение с параметром
1. Система координат в пространстве.
Выберем начало координат. Проведем три взаимно перпендикулярные оси х, y и z . Выберем масштаб.

Получилась система координат в трехмерном пространстве.
Каждая точка характеризуется тремя числами – координатами по x, y и z. Запись M(−1;
3;
2)
означает,
что координата точки M по
x (абсцисса) равна −1, координата
по y (ордината) равна 3, а координата по z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости.
Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами
x, y и z:
ﺂ؟![]() (xa; ya; za)
(xa; ya; za)
Чтобы найти
координаты
вектора, так же, как и на плоскости, из
координаты конца надо вычесть координату начала.
1.![]()
![]()
2.![]()
![]()
Если точка M – середина отрезка AB,
то ее координаты находятся по формуле:
3. ![]()
![]()
![]()
4. 
 – сумма векторов.
– сумма векторов.
5. ![]() – разность векторов.
– разность векторов.
6. ![]() – произведение вектора на число.
– произведение вектора на число.
7. ![]() – скалярное произведение векторов
– скалярное произведение векторов
8.  – косинус угла между
– косинус угла между
векторами.
2. Введение системы координат.
Метод
координат – это, конечно, очень хорошо, но в настоящих задачах C2
никаких координат и векторов нет, поэтому их надо вводить.
Самое
замечательное свойство заключается в том, что не имеет никакого значения как
именно вводить систему координат. Если все вычисления будут правильными, то и
ответ будет правильным.

2.1
Координаты куба.
Система координат вводится очень просто:
1. Начало
координат – в точке A
2. Если
ребро куба не указано, то принимаем его за единичный отрезок;
3. Ось
x
направляем по ребру АВ, у – по ребру АD, а
ось z
– по ребру AA1 .
Теперь
у каждой вершины куба есть координаты:
A
(0; 0; 0), B (1; 0; 0), C
(1; 1; 0), D (0; 1; 0),
A1 (0; 0;1) B
(1; 0; 1) C1
(1; 1; 1), D1
(0; 1; 1).
2.2 Координаты
правильной треугольной призмы


A
(1; 0; 0), B![]() , C
, C
(0; 0; 0), A1 (1;
0; 1), B1 ![]() , C1 (0; 0; 1).
, C1 (0; 0; 1).
2.3
Координаты правильной шестиугольной призмы


, , , ,
, , ,
, , ,
, .
2.4 Координаты
правильной четырехугольной пирамиды

Введем
систему координат с началом в точке А
A (0; 0; 0), B (1;
0; 0), C (1; 1; 0), D (0; 1; 0), H (0,5;
0,5; 0).
Найдем
координаты точки S. Рассмотрим треугольники ASH и ABH
1. AS = AB =
1 по условию;
2. Угол AHS = AHB =
90°, поскольку SH — высота, а AH ⊥ HB как диагонали
квадрата;
3. Сторона AH — общая.
Следовательно,
прямоугольные треугольники ASH и ABH равны по одному
катету и гипотенузе. Значит, SH = BH =
0,5 · BD. Но BD — диагональ квадрата
со стороной 1. Поэтому имеем:
![]()
Итак,
координаты точки S:

 Рассмотрим
Рассмотрим
случай, если боковые ребра пирамиды не равны ребрам основания.
В этом случае рассмотрим треугольник AHS:
Треугольник AHS — прямоугольный,
причем гипотенуза AS — это одновременно и боковое
ребро исходной пирамиды SABCD. Катет: AH =
0,5 · AC. Оставшийся катет SH найдем по теореме
Пифагора. Это и будет координата z для
точки S.
3. Матрицы и
определители второго и третьего порядка.
Определение:
Таблица, составленная из четырёх чисел ![]() называется
называется
квадратной матрицей второго порядка. Числа ![]() называют
называют
элементами матрицы.
Определение:
Число ∆ называется определителем или детерминантом матрицы.
∆=
Определитель третьего порядка можно вычислить так:

4. Метод
координат в пространстве
4.1 Угол
между прямыми.
Вычисление
направляющих векторов для прямых.
В задаче С2
прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть
вектор с началом и концом в этих точках, получим направляющий вектор для
прямой.


α-угол
между прямыми
3.1 Угол
между двумя прямыми – это угол между их направляющими векторами.
 Задача 1.
Задача 1.
В единичном
кубе ABCDA1B1C1D1
найдите угол между прямыми AE и BF, где E –
середина ребра A1B1,
где Е – середина ребра А1В1 а F –
середина ребра B1C1.
Решение
(1 способ)
K–
середина A1D1 AK║BF
угол KAE = φ
По теореме
Пифагора

По
теореме косинусов для ∆ AKE
KE² = AE²
+ AK²
– 2 * AE
*AK
* cos φ
cos φ=0,8
φ=arccos0.8
Решение
(2 способ)
С
помощью векторов и координат легко найти угол между прямыми.
 |
А
если требуется найти угол между плоскостями или между прямой и плоскостью, то
для этого нам понадобится уравнение плоскости в пространстве.
4.2
Плоскость в пространстве задается уравнением.
Ax+By+Cz+D=0,
где A,
B
и С – координаты вектора, перпендикулярного этой плоскости. Его называют
нормалью к плоскости.
Чтобы
написать уравнение плоскости, берем координаты трех принадлежащих ей точек.
Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Напишем
уравнение плоскости, проходящей через точки M (1;
0; 1), N(2;
-2; 0) и К (4; 1; 2)
Уравнение
плоскости выглядит так:
Ax+By+Cz+D=0
Получим
систему из трех уравнений:

В ней
четыре неизвестных: A, B,
С и D.
Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило –
простое вместо одной из переменных можно взять любое число, не равное нулю.
Решив систему, получим:
A=-![]() B=-
B=-![]() C=
C=![]()
Уравнение
плоскости MNK имеет вид:
![]()
Умножим
обе части уравнения на -3. Тогда коэффициенты станут целыми:
x+4y+7z+6-0
Вектор
![]() (1; 4; -7) – это нормаль к плоскости MNK.
(1; 4; -7) – это нормаль к плоскости MNK.
Если
плоскость проходит через начало координат, то D=0
(так как D≠0 не позволит получить верное числовое
равенство).
Уравнение
плоскости, проходящей, через заданную точку ![]() имеет
имеет
вид:
![]()
Уравнение плоскости можно составить и с помощью определителя третьего
порядка :
Пусть имеем точки
![]()
![]()
![]() ,
,
Тогда уравнение плоскости, проходящей через эти
три точки ,будет иметь вид:
 =0
=0
4.3
Угол между плоскостями равен углу между нормалями к
этим плоскостям:
cos φ=
![]()
При
пересечении двух плоскостей образуется четыре угла . Мы
берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения –
чтобы косинус угла был неотрицателен.
Задача
2
В кубе ABCDA1B1C1D1 точки E и F с
середины ребер соответственно A1B1 и
A1D1. Найдите косинус угла между плоскостями AEF и BDD1.

Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы
строить пересечения. Но координатный метод значительно всё
упрощает. Достаточно отметить координаты нужных точек и найти
угол между нормалями
к плоскостям
AEF и BDD1.
A(0;
0; 0), C(1; 1; 0)
Сначала
– нормаль к плоскости BDD1.
Мы можем подставить координаты точек B, D
и D1 в уравнение плоскости и найти координаты
вектора нормали. А можно увидеть нужную нормаль на чертеже. Ведь плоскость BDD1 – это диагональное сечение куба. Вектор ![]() перпендикулярен этой плоскости.
перпендикулярен этой плоскости.
Итак,
первый вектор нормали у нас уже есть: ![]()
Напишем
уравнение плоскости AEF.
A![]() E
E![]() F
F![]()
Составим уравнение плоскости:


![]()
Уравнение
плоскости AEF: 2x+2y–z=0
Нормаль
к плоскости AEF: ![]() (2;
(2;
2; -1)
Найдем
угол между плоскостями: ![]()
 4.4
4.4
Угол между прямой и плоскостью
![]()

![]()
Задача
3.
В
правильной четырехугольной пирамиде SABCD, все
ребра которой равны 1, найдите угол между прямой DE, где E-середина
апофемы SF
грани ASB
грани и плоскостью ASC

![]()
![]()
![]()
![]()
![]()
![]()

![]()
OB –
вектор нормали плоскости ASC
DE –
направляющий вектор прямой
OB – ![]() – вектор нормали
– вектор нормали
плоскости ASC
DE – ![]() – вектор направляющей
– вектор направляющей
вектор прямой DE
 |
![]()
 Ответ:
Ответ:
4.5
Расстояние от точки до плоскости


Задача
4
В правильной шестиугольной призме ABCDEFA1B1C1D1E1F1
, все рёбра которой равны 1, найдите расстояние от точки E
до прямой B1C1.

Решение
(1 способ)
1) Рассмотрим ΔCDE:
по теореме косинусов:
СЕ2 = 2СD2
– 2CD2 cos120° = 2 + 2*1/2 = 3 =>
CE = ![]()
2) Рассмотрим ΔС1СЕ: он
прямоугольный, т.к. С1С перпендикулярна плоскости нижнего основания
=> CC1
перпендикулярна СЕ.
По теореме Пифагора:
С1Е2 = (![]() )2 + 12
)2 + 12
= 4, С1Е = 2
3) Рассмотрим ΔBCE:
он прямоугольный , т.к. 120° – 60°:2 = 90° (из ΔCDE)
ВЕ2 = (![]() )2 + 12
)2 + 12
= 4, ВЕ = 2
4) Рассмотрим ΔВВ1Е: он прямоугольный,
т.к. ВВ1 перпендикулярна ВЕ,
по теореме Пифагора:
В1Е2 = В1В2
+ ВЕ2 = 4 + 1 = 5, ВЕ = ![]()
5) Рассмотрим ΔВ1С1Е:
С1Е = 2, С1В1
= 1, В1Е = ![]() , т.е. 22 + 12
, т.е. 22 + 12
= (![]() )2. Таким образом,
)2. Таким образом,
по теореме обратной теореме Пифагора, ΔВ1С1Е –
прямоугольный, угол В1С1Е = 90°
 6) Искомое расстояние от точки Е до прямой В1С1
6) Искомое расстояние от точки Е до прямой В1С1
– это длина С1Е = 2
2
способ
1)
Поместим призму в прямоугольную систему координат, расположив координатные оси,
как показано на рисунке. СС1, СВ и СЕ попарно перпендикулярны,
поэтому можно направить вдоль них координатные оси. Получаем координаты:
С1 (0;0;1),
Е (![]() ;0;0), В1 (0;1;1)
;0;0), В1 (0;1;1)
2) Найдем координаты
векторов С1В1 и С1Е:
С1В1
(0;1;0), С1Е (![]() ;0;-1).
;0;-1).
3) Найдем косинус угла
между С1В1 и С1Е, используя скалярное
произведение векторов С1В1 и С1Е:
cosβ = ![]() = 0 => β
= 0 => β
= 90° => C1E
– искомое расстояние.
4) С1Е = ![]() =2
=2
4.6 Расстояние между скрещивающимися прямыми
в пространстве — это длина их общего перпендикуляра. Общий перпендикуляр скрещивающихся прямых — отрезок с
концами на этих прямых, перпендикулярный обеим этим прямым.
Если прямые в пространстве пересекаются, расстояние между ними считается равным
0.
Пусть есть не
пересекающиеся в пространстве прямые a и b.
Построим плоскости α и β так, чтобы эти плоскости были
параллельны, плоскость α содержала в себе прямую a, плоскость β содержала в себе прямую b.
Расстоянием между прямыми a и b будет расстояние между плоскостями α и β.


Введение системы координат
Метод координат — это, конечно, очень хорошо, но в настоящих задачах C2 никаких координат и векторов нет. Поэтому их придется вводить. Да-да, вот так взять и ввести: указать начало отсчета, единичный отрезок и направление осей x, y и z.
Самое замечательное свойство этого метода заключается в том, что не имеет никакого значения, как именно вводить систему координат. Если все вычисления будут правильными, то и ответ будет правильным.
Тем не менее, приведу некоторые рекомендации, как лучше ввести систему координат для самых часто встречающихся в задаче C2 многогранников. С указанием конкретных точек. Во всех случаях упор делается на минимизацию объема вычислений.
Координаты куба
Если в задаче C2 будет куб — считайте, что вам повезло. Это самый простой многогранник, все двугранные углы которого равны 90°.
Система координат также вводится очень просто:
- Начало координат — в точке A;
- Чаще всего ребро куба не указано, поэтому принимаем его за единичный отрезок;
- Ось x направляем по ребру AB, y — по ребру AD, а ось z — по ребру AA1.
Обратите внимание: ось z направляется вверх! После двумерной системы координат это несколько непривычно, но на самом деле очень логично.
Итак, теперь у каждой вершины куба есть координаты. Соберем их в таблицу — отдельно для нижней плоскости куба:
| Точка | A | B | C | D |
| Координаты | (0; 0; 0) | (1; 0; 0) | (1; 1; 0) | (0; 1; 0) |
| Точка | A1 | B1 | C1 | D1 |
| Координаты | (0; 0; 1) | (1; 0; 1) | (1; 1; 1) | (0; 1; 1) |
Несложно заметить, что точки верхней плоскости отличаются соответствующих точек нижней только координатой z. Например, B = (1; 0; 0), B1 = (1; 0; 1). Главное — не запутаться!
Координаты трехгранной призмы
Призма — это уже намного веселее. При правильном подходе достаточно знать координаты только нижнего основания — верхнее будет считаться автоматически.
В задачах C2 встречаются исключительно правильные трехгранные призмы (прямые призмы, в основании которых лежит правильный треугольник). Для них система координат вводится почти так же, как и для куба. Кстати, если кто не в курсе, куб — это тоже призма, только четырехгранная.
Итак, поехали! Вводим систему координат:
- Начало координат — в точке A;
- Сторону призмы принимаем за единичный отрезок, если иное не указано в условии задачи;
- Ось x направляем по ребру AB, z — по ребру AA1, а ось y расположим так, чтобы плоскость OXY совпадала с плоскостью основания ABC.
Здесь требуются некоторые пояснения. Дело в том, что ось y НЕ совпадает с ребром AC, как многие считают. А почему не совпадает? Подумайте сами: треугольник ABC — равносторонний, в нем все углы по 60°. А углы между осями координат должны быть по 90°, поэтому сверху картинка будет выглядеть так:
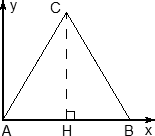
Надеюсь, теперь понятно, почему ось y не пойдет вдоль AC. Проведем в этом треугольнике высоту CH. Треугольник ACH — прямоугольный, причем AC = 1, поэтому AH = 1 · cos A = cos 60°; CH = 1 · sin A = sin 60°. Эти факты нужны для вычисления координат точки C.
Теперь взглянем на всю призму вместе с построенной системой координат:
Получаем следующие координаты точек:

Как видим, точки верхнего основания призмы снова отличаются от соответствующих точек нижнего лишь координатой z. Основная проблема — это точки C и C1. У них есть иррациональные координаты, которые надо просто запомнить. Ну, или понять, откуда они возникают.
Координаты шестигранной призмы
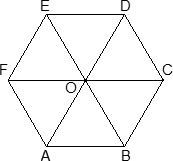
Шестигранная призма — это «клонированная» трехгранная. Можно понять, как это происходит, если взглянуть на нижнее основание — обозначим его ABCDEF. Проведем дополнительные построения: отрезки AD, BE и CF. Получилось шесть треугольников, каждый из которых (например, треугольник ABO) является основанием для трехгранной призмы.
Теперь введем собственно систему координат. Начало координат — точку O — поместим в центр симметрии шестиугольника ABCDEF. Ось x пойдет вдоль FC, а ось y — через середины отрезков AB и DE. Получим такую картинку:
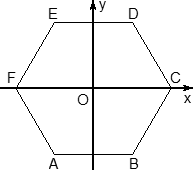
Обратите внимание: начало координат НЕ совпадает с вершиной многогранника! На самом деле, при решении настоящих задач вы обнаружите, что это очень удобно, поскольку позволяет значительно уменьшить объем вычислений.
Осталось добавить ось z. По традиции, проводим ее перпендикулярно плоскости OXY и направляем вертикально вверх. Получим итоговую картинку:
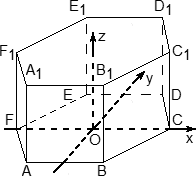
Запишем теперь координаты точек. Предположим, что все ребра нашей правильной шестигранной призмы равны 1. Итак, координаты нижнего основания:

Координаты верхнего основания сдвинуты на единицу по оси z:

Координаты четырехугольной пирамиды
Пирамида — это вообще очень сурово. Мы разберем только самый простой случай — правильную четырехугольную пирамиду, все ребра которой равны единице. Однако в настоящих задачах C2 длины ребер могут отличаться, поэтому ниже приведена и общая схема вычисления координат.
Итак, правильная четырехугольная пирамида. Это такая же, как у Хеопса, только чуть поменьше. Обозначим ее SABCD, где S — вершина. Введем систему координат: начало в точке A, единичный отрезок AB = 1, ось x направим вдоль AB, ось y — вдоль AD, а ось z — вверх, перпендикулярно плоскости OXY. Для дальнейших вычислений нам потребуется высота SH — вот и построим ее. Получим следующую картинку:
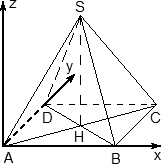
Теперь найдем координаты точек. Для начала рассмотрим плоскость OXY. Здесь все просто: в основании лежит квадрат, его координаты известны. Проблемы возникают с точкой S. Поскольку SH — высота к плоскости OXY, точки S и H отличаются лишь координатой z. Собственно, длина отрезка SH — это и есть координата z для точки S, поскольку H = (0,5; 0,5; 0).
Заметим, что треугольники ABC и ASC равны по трем сторонам (AS = CS = AB = CB = 1, а сторона AC — общая). Следовательно, SH = BH. Но BH — половина диагонали квадрата ABCD, т.е. BH = AB · sin 45°. Получаем координаты всех точек:
Вот и все с координатами пирамиды. Но не с координатами вообще. Мы рассмотрели лишь самые распространенные многогранники, однако этих примеров достаточно, чтобы самостоятельно вычислить координаты любых других фигур. Поэтому можно приступать, собственно, к методам решения конкретных задач C2.
Метод координат в задачах типа С2.
Обращаем Ваше внимание, что в соответствии с Федеральным законом N 273-ФЗ «Об образовании в Российской Федерации» в организациях, осуществляющих образовательную деятельность, организовывается обучение и воспитание обучающихся с ОВЗ как совместно с другими обучающимися, так и в отдельных классах или группах.
В ы б е р е м н а ч а л о к оо р д и н а т . П р о в е д е м т ри в з а и м н о п е р п е н д и к у л яр ны е о с и х , y и z . Выберем м а с ш т а б .

П о л у ч и л а с ь с и с т е м а к о о р д и н а т в т р е х м е р н о м п р о с т р а н с т в е .
К а ж д а я т о ч к а х а р а к т е р и з у е т с я т р е м я ч и с л а м и — к оо р д и н а т а м и п о x , y и z . З а п и с ь M ( − 1 ; 3 ; 2 ) о з н а ч а е т , ч т о к оо р д и н а т а т о ч к и M п о x ( а б с ц и сс а ) р а в н а − 1 , к оо р д и н а т а п о y ( о р д и н а т а ) р а в н а 3 , а к оо р д и н а т а п о z ( а пп л и к а т а ) р а в н а 2 .
В е к т о р ы в п р о с т р а н с т в е о п р е д е л яю т с я т а к ж е , к а к и н а п л о с к о с т и.
Э т о н а п р а в л е н ны е о т р е з к и, и м е ю щ и е н а ч а л о и к о н е ц . Т о л ь к о в п р о с т р а н с т в е в е к т о р з а д а е т с я т р е м я к оо р д и н а т а м и x , y и z :
ﺂ؟  ( x a ; y a ; z a )
( x a ; y a ; z a )
Чтобы н а й т и к о о р д и н а т ы в е к т о р а , так же, как и на плоскости, и з к оо р д и н а т ы к о н ц а надо в ы ч есть к оо р д и н а т у н а ч а ла.
1. 

2. 
Если точка M – середина отрезка AB , то ее координаты находятся по формуле:
3. 


4.  – сумма векторов.
– сумма векторов.
5.  – разность векторов.
– разность векторов.
6.  – произведение вектора на число.
– произведение вектора на число.
7.  — скалярное произведение векторов
— скалярное произведение векторов
8.  – косинус угла между векторами.
– косинус угла между векторами.
2. Введение системы координат.
Метод координат – это, конечно, очень хорошо, но в настоящих задачах C 2 никаких координат и векторов нет, поэтому их надо вводить.
Самое замечательное свойство заключается в том, что не имеет никакого значения как именно вводить систему координат. Если все вычисления будут правильными, то и ответ будет правильным.

2.1 Координаты куба.
Система координат вводится очень просто:
Начало координат – в точке A
Если ребро куба не указано, то принимаем его за единичный отрезок;
Ось x направляем по ребру АВ, у – по ребру А D , а ось z – по ребру AA 1 .
Теперь у каждой вершины куба есть координаты:
A (0; 0; 0), B (1; 0; 0), C (1; 1; 0), D (0; 1; 0),
2.2 Координаты правильной треугольной призмы


A (1; 0; 0), B  , C (0; 0; 0), A 1 (1; 0; 1), B 1
, C (0; 0; 0), A 1 (1; 0; 1), B 1  , C 1 (0; 0; 1).
, C 1 (0; 0; 1).
2.3 Координаты правильной шестиугольной призмы














2.4 Координаты правильной четырехугольной пирамиды

Введем систему координат с началом в точке А
Найдем координаты точки S . Рассмотрим треугольники ASH и ABH
AS = AB = 1 по условию;
Угол AHS = AHB = 90°, поскольку SH — высота, а AH ⊥ HB как диагонали квадрата;
Сторона AH — общая.
Следовательно, прямоугольные треугольники ASH и ABH равны по одному катету и гипотенузе. Значит, SH = BH = 0,5 · BD . Но BD — диагональ квадрата со стороной 1. Поэтому имеем:

Итак, координаты точки S :

Рассмотрим случай, если боковые ребра пирамиды не равны ребрам основания. В этом случае рассмотрим треугольник AHS : 
Треугольник AHS — прямоугольный , причем гипотенуза AS — это одновременно и боковое ребро исходной пирамиды SABCD . Катет: AH = 0,5 · AC . Оставшийся катет SH найдем по теореме Пифагора . Это и будет координата z для точки S .
3. Матрицы и определители второго и третьего порядка.
Определение: Таблица, составленная из четырёх чисел  называется квадратной матрицей второго порядка. Числа называют элементами матрицы.
называется квадратной матрицей второго порядка. Числа называют элементами матрицы.
Определение: Число ∆ называется определителем или детерминантом матрицы.
∆ = 
Определитель третьего порядка можно вычислить так:

4. Метод координат в пространстве
4.1 Угол между прямыми.
Вычисление направляющих векторов для прямых.
В задаче С2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим направляющий вектор для прямой.


α -угол между прямыми
3.1 Угол между двумя прямыми – это угол между их направляющими векторами.
Задача 1 . 
В единичном кубе ABCDA 1 B 1 C 1 D 1 найдите угол между прямыми AE и BF , где E – середина ребра A 1 B 1 , где Е – середина ребра А 1 В 1 а F – середина ребра B 1 C 1.
Решение (1 способ)
K — середина A 1 D 1 AK ║ BF угол KAE = φ
По теореме Пифагора




По теореме косинусов для ∆ AKE
KE ² = AE ² + AK ² — 2 * AE * AK * cos φ
cos φ =0,8 φ = arccos 0.8
Решение (2 способ)






С помощью векторов и координат легко найти угол между прямыми.

А если требуется найти угол между плоскостями или между прямой и плоскостью, то для этого нам понадобится уравнение плоскости в пространстве.
4.2 Плоскость в пространстве задается уравнением.
Ax + By + Cz + D =0,
где A , B и С – координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.
Чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; -2; 0) и К (4; 1; 2)
Уравнение плоскости выглядит так:
Ax + By + Cz + D =0
Получим систему из трех уравнений:

В ней четыре неизвестных: A , B , С и D . Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило – простое вместо одной из переменных можно взять любое число, не равное нулю.
Решив систему, получим:
A =-  B =-
B =-  C =
C = 
Уравнение плоскости MNK имеет вид:

Умножим обе части уравнения на -3. Тогда коэффициенты станут целыми:
Вектор  (1; 4; -7 ) – это нормаль к плоскости MNK .
(1; 4; -7 ) – это нормаль к плоскости MNK .
Если плоскость проходит через начало координат, то D =0 (так как D ≠0 не позволит получить верное числовое равенство).
Уравнение плоскости, проходящей, через заданную точку  имеет вид:
имеет вид:

Уравнение плоскости можно составить и с помощью определителя третьего порядка :
Пусть имеем точки


 ,
,
Тогда уравнение плоскости, проходящей через эти три точки ,будет иметь вид:
 =0
=0
4.3 Угол между плоскостями равен углу между нормалями к этим плоскостям:
cos φ = 
При пересечении двух плоскостей образуется четыре угла . Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения – чтобы косинус угла был неотрицателен.
В кубе A B C D A 1 B 1 C 1 D 1 то ч к и E и F с середины ребер соответственно A 1 B 1 и
A 1 D 1 . Найдите косинус у г л а между плоскостями A E F и B D D 1 .

В и д н о , ч т о п л о с к о с т и A E F и B D D 1 пересекаются где-то вне куба . В классическом решении пришлось бы строить пересечения . Н о координатный м е т о д з н а ч и т е л ь н о в с ё у п р о щ а е т . Достаточно о т м е т и ть к оо р д и н а т ы н у ж н ы х т о ч е к и н а й ти у г о л м е ж д у н о р м а л я м и к п л о с к о с т я м A E F и B D D 1 .
A (0; 0; 0), C (1; 1; 0)
Сначала – нормаль к плоскости BDD 1 . Мы можем подставить координаты точек B , D и D 1 в уравнение плоскости и найти координаты вектора нормали. А можно увидеть нужную нормаль на чертеже. Ведь плоскость BDD 1 – это диагональное сечение куба. Вектор  перпендикулярен этой плоскости.
перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть: 
Напишем уравнение плоскости AEF .
A  E
E  F
F 
Составим уравнение плоскости:


Уравнение плоскости AEF : 2 x +2 y — z =0
Нормаль к плоскости AEF :  (2; 2; -1)
(2; 2; -1)
Найдем угол между плоскостями: 
4.4 Угол между прямой и плоскостью 



В правильной четырехугольной пирамиде SABCD , все ребра которой равны 1, найдите угол между прямой DE , где E -середина апофемы SF грани ASB грани и плоскостью ASC








OB — вектор нормали плоскости ASC
DE — направляющий вектор прямой
OB —  — вектор нормали плоскости ASC
— вектор нормали плоскости ASC
DE — — вектор направляющей вектор прямой DE


 Ответ:
Ответ:
4.5 Расстояние от точки до плоскости


В правильной шестиугольной призме ABCDEFA 1 B 1 C 1 D 1 E 1 F 1 , все рёбра которой равны 1, найдите расстояние от точки E до прямой B 1 C 1 .

Решение (1 способ)
1) Рассмотрим Δ CDE :
по теореме косинусов:
СЕ 2 = 2 С D 2 — 2CD 2 cos120° = 2 + 2*1/2 = 3 =>
CE = 
2) Рассмотрим ΔС 1 СЕ: он прямоугольный, т.к. С 1 С перпендикулярна плоскости нижнего основания => CC 1 перпендикулярна СЕ.
По теореме Пифагора:
С 1 Е 2 = ( ) 2 + 1 2 = 4, С 1 Е = 2
3) Рассмотрим ΔBCE : он прямоугольный , т.к. 120° — 60°:2 = 90° (из Δ CDE )
ВЕ 2 = ( ) 2 + 1 2 = 4, ВЕ = 2
4) Рассмотрим ΔВВ 1 Е: он прямоугольный, т.к. ВВ 1 перпендикулярна ВЕ,
по теореме Пифагора:
В 1 Е 2 = В 1 В 2 + ВЕ 2 = 4 + 1 = 5, ВЕ = 
С 1 Е = 2, С 1 В 1 = 1, В 1 Е = , т.е. 2 2 + 1 2 = ( ) 2 . Таким образом, по теореме обратной теореме Пифагора, ΔВ 1 С 1 Е – прямоугольный, угол В 1 С 1 Е = 90°
6) Искомое расстояние от точки Е до прямой В 1 С 1 – это длина С 1 Е = 2 
1) Поместим призму в прямоугольную систему координат, расположив координатные оси, как показано на рисунке. СС 1 , СВ и СЕ попарно перпендикулярны, поэтому можно направить вдоль них координатные оси. Получаем координаты:
С 1 (0;0;1), Е ( ;0;0), В 1 (0;1;1)
2) Найдем координаты векторов С 1 В 1 и С 1 Е:
С 1 В 1 (0;1;0), С 1 Е ( ;0;-1).
3) Найдем косинус угла между С 1 В 1 и С 1 Е, используя скалярное произведение векторов С 1 В 1 и С 1 Е:
cosβ =  = 0 => β = 90° => C 1 E – искомое расстояние.
= 0 => β = 90° => C 1 E – искомое расстояние.
4) С 1 Е =  =2
=2
4.6 Расстояние между скрещивающимися прямыми
в пространстве — это длина их общего перпендикуляра. Общий перпендикуляр скрещивающихся прямых — отрезок с концами на этих прямых, перпендикулярный обеим этим прямым.
Если прямые в пространстве пересекаются, расстояние между ними считается равным 0.
Пусть есть не пересекающиеся в пространстве прямые a и b.
Построим плоскости α и β так, чтобы эти плоскости были параллельны, плоскость α содержала в себе прямую a , плоскость β содержала в себе прямую b .
Расстоянием между прямыми a и b будет расстояние между плоскостями α и β .


Александров А.Д. и др
. Геометрия для 10-11 классов: Учеб. пособие для учащихся школ и классов с углубленным изучением математики . Просвещение, 1992.
2. Ю.М.Нейман, Т.М. Королева, Е.Г. Маркарян .
Математика: ЕГЭ: Учебно-справочные материалы «Просвещение», 2011.
3 . Погорелов А.В.
Геометрия: Учеб. для 7-11 кл. сред. шк., 4-е изд. – М.: Просвещение, 1993.
ЕГЭ 2011. Математика. Задача С2. Геометрия. Стереометрия
. Под ред. А. Л. Семенова и И.В.Ященко. МЦНМО, 2011.
Нахождение углов между прямыми и плоскостями (координатно-векторный метод) . Математика в школе. — 2011. — №4.
Уравнение куба в системе координат
Мы уже говорили, что уже арабские математики средневековья владели всей теорией решения квадратных уравнений. Другое дело – уравнения кубические. Если решение квадратных уравнений может быть найдено с помощью определенных построений циркулем и линейкой (эти построения, так называемые «приложения площадей», были известны уже древним грекам), то корень кубического уравнения, вообще говоря, невозможно построить циркулем и линейкой. Поэтому для их решений были нужны другие методы. Во-первых, существовали приближенные методы вычисления корней, с помощью которых можно было найти корень с любой заданной точностью. А во-вторых, для анализа разрешимости уравнения, числа его корней и примерной их оценки применялись графические методы.
Под графическим решением уравнения мы сейчас обычно понимаем (в простейшем случае) построение графиков функций и и нахождение абсцисс точек их пересечения. В более общем случае уравнение может быть сведено к системе каких-либо двух уравнений с двумя неизвестными – не обязательно эти уравнения должны иметь форму и . Каждое из уравнений трактуется как уравнение некоторой кривой на координатной плоскости; координаты точек их пересечения этих кривых удовлетворяют обоим уравнениям, и, следовательно, являются решением системы, по ним можно получить и корень исходного уравнения. Разумеется, с помощью графического решения, как правило, невозможно найти значение корней уравнения точно. Тем не менее, оно часто бывает полезным для того, чтобы приблизительно определить их значение или получить общее представление о числе положительных и отрицательных корней и т. п.
Хотя у древних греков не было идеи графиков функций в современном смысле, они владели определенной техникой, которую мы бы, в переводе на современный язык, сочли именно графическим решением уравнений. Задача, которую было необходимо решить, формулировалась в виде некоторого соотношения (уравнения), которое затем переводилось в форму двух соотношений между двумя неизвестными величинами (система двух уравнений с двумя неизвестными). Эти две величины трактовались как расстояния от точки до двух перпендикулярных прямых (фактически, осей координат): строились две кривые, соответствующие двум данным соотношениям между этими расстояниями (координатами), и находились точки пересечения этих кривых.
С помощью этой техники греки, а затем и арабы, находили, в частности, решения кубических уравнений. Уже говорилось, что с помощью точек пересечения гиперболы и параболы или двух парабол Менехм строил решение знаменитой задачи об удвоении куба, то есть решал уравнение вида 3 = . Греки сталкивались и с другими типами кубических уравнений. Так, Архимед рассматривал задачу о делении шара плоскостью на два сегмента, объемы которых находятся в данном отношении (1 : 2 = ). Эта задача сводится к решению кубического уравнения вида 3 + = 2 . Дело в том, что объем шарового сегмента (как это открыл тот же Архимед) является кубической функцией его высоты (да еще без линейного члена):
Это довольно приятное обстоятельство: скажем, площадь кругового сектора зависит от его высоты существенно более сложным образом.
Архимед построил корень полученного кубического уравнения как координату точки пересечения параболы и гиперболы и произвел тщательный анализ задачи.
Выведите уравнение, соответствующее задаче Архимеда (приняв за высоту одного из сегментов).
Если радиус шара , а высота одного из сегментов , то высота другого – . Объем первого сегмента ,
а объем второго (в сумме, нетрудно видеть, они составляют – известная формула объема шара, доказанная также Архимедом).
Т. к. отношение объемов равно ,
 |
4 3 – 3 2 + 3 = (3 2 – 3 ) ,
3 ( + 1) + 4 3 = 3 ( + 1) 2 ,
3 + 4 3 / ( + 1) = 3 2 .
Другой вариант – положить обратное отношение равным . Тогда:
источники:
http://infourok.ru/metod_koordinat_v_zadachah_tipa_s2.-305542.htm
http://files.school-collection.edu.ru/dlrstore/747e2c5b-94cd-2790-c830-53d7b87da0a0/00145619916288759.htm
