Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 20 августа 2021 года; проверки требуют 7 правок.
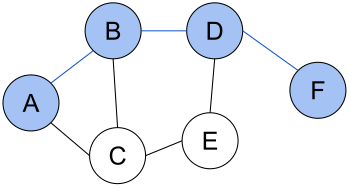
Кратчайший путь (A, B, D, F) между вершинами A и F в неориентированном графе без весов.
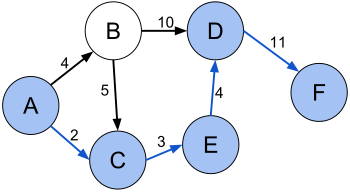
Кратчайший путь (A, C, E, D, F) между вершинами A и F во взвешенном ориентированном графе.
Зада́ча о кратча́йшем пути́ — задача поиска самого короткого пути (цепи) между двумя точками (вершинами) на графе, в которой минимизируется сумма весов рёбер, составляющих путь.
Задача о кратчайшем пути является одной из важнейших классических задач теории графов. Сегодня известно множество алгоритмов для её решения[⇨].
У данной задачи существуют и другие названия: задача о минимальном пути или, в устаревшем варианте, задача о дилижансе.
Значимость данной задачи определяется её различными практическими применениями[⇨]. Например, в GPS-навигаторах осуществляется поиск кратчайшего пути между точкой отправления и точкой назначения. В качестве вершин выступают перекрёстки, а дороги являются рёбрами, которые лежат между ними. Если сумма длин дорог между перекрёстками минимальна, тогда найденный путь самый короткий.
Определение[править | править код]
Задача поиска кратчайшего пути на графе может быть определена для неориентированного, ориентированного или смешанного графа. Далее будет рассмотрена постановка задачи в самом простом виде для неориентированного графа. Для смешанного и ориентированного графа дополнительно должны учитываться направления ребер.
Граф представляет собой совокупность непустого множества вершин и рёбер (наборов пар вершин). Две вершины на графе смежны, если они соединяются общим ребром. Путь в неориентированном графе представляет собой последовательность вершин 








Пусть 









Существуют различные постановки задачи о кратчайшем пути:
- Задача о кратчайшем пути в заданный пункт назначения. Требуется найти кратчайший путь в заданную вершину назначения t, который начинается в каждой из вершин графа (кроме t). Поменяв направление каждого принадлежащего графу ребра, эту задачу можно свести к задаче о единой исходной вершине (в которой осуществляется поиск кратчайшего пути из заданной вершины во все остальные).
- Задача о кратчайшем пути между заданной парой вершин. Требуется найти кратчайший путь из заданной вершины u в заданную вершину v.
- Задача о кратчайшем пути между всеми парами вершин. Требуется найти кратчайший путь из каждой вершины u в каждую вершину v. Эту задачу тоже можно решить с помощью алгоритма, предназначенного для решения задачи об одной исходной вершине, однако обычно она решается быстрее.
В различных постановках задачи, роль длины ребра могут играть не только сами длины, но и время, стоимость, расходы, объём затрачиваемых ресурсов (материальных, финансовых, топливно-энергетических и т. п.) или другие характеристики, связанные с прохождением каждого ребра. Таким образом, задача находит практическое применение в большом количестве областей (информатика, экономика, география и др.).
Задача о кратчайшем пути с учётом дополнительных ограничений[править | править код]
Задача о кратчайшем пути очень часто встречается в ситуации, когда необходимо учитывать дополнительные ограничения. Наличие их может значительно повысить сложность задачи[1]. Примеры таких задач:
- Кратчайший путь, проходящий через заданное множество вершин. Можно рассматривать два ограничения: кратчайший путь должен проходить через выделенное множество вершин, и кратчайший путь должен содержать как можно меньше невыделенных вершин. Первое из них хорошо известна в теории исследования операций[2].
- Минимальное покрытие вершин ориентированного графа путями. Осуществляется поиск минимального по числу путей покрытия графа, а именно подмножества всех s-t путей, таких что, каждая вершина ориентированного графа принадлежит хотя бы одному такому пути[3].
- Задача о требуемых путях. Требуется найти минимальное по мощности множество s-t путей
такое, что для любого
найдется путь
, накрывающий его.
— множество некоторых путей в ориентированном графе G[4].
- Минимальное покрытие дуг ориентированного графа путями. Задача состоит в отыскании минимального по числу путей подмножества всех путей, такого, что каждая дуга принадлежит хотя бы одному такому пути. При этом возможно дополнительное требование о том, чтобы все пути исходили из одной вершины[5].
Алгоритмы[править | править код]
В связи с тем, что существует множество различных постановок данной задачи, есть
наиболее популярные алгоритмы для решения задачи поиска кратчайшего пути на графе:
- Алгоритм Дейкстры находит кратчайший путь от одной из вершин графа до всех остальных. Алгоритм работает только для графов без рёбер отрицательного веса[6].
- Алгоритм Беллмана — Форда находит кратчайшие пути от одной вершины графа до всех остальных во взвешенном графе. Вес рёбер может быть отрицательным.
- Алгоритм поиска A* находит маршрут с наименьшей стоимостью от одной вершины (начальной) к другой (целевой, конечной), используя алгоритм поиска по первому наилучшему совпадению на графе.
- Алгоритм Флойда — Уоршелла находит кратчайшие пути между всеми вершинами взвешенного ориентированного графа[6].
- Алгоритм Джонсона находит кратчайшие пути между всеми парами вершин взвешенного ориентированного графа.
- Алгоритм Ли (волновой алгоритм) основан на методе поиска в ширину. Находит путь между вершинами s и t графа (s не совпадает с t), содержащий минимальное количество промежуточных вершин (рёбер). Основное применение — трассировки электрических соединений на кристаллах микросхем и на печатных платах. Также используется для поиска кратчайшего расстояния на карте в стратегических играх.
- Поиск кратчайшего пути на основе алгоритма Килдала[7].
В работе (Черкасский и др., 1993)[8] представлено ещё несколько алгоритмов для решения этой задачи.
Задача поиска кратчайшего пути из одной вершины во все остальные[править | править код]
В такой постановке задачи осуществляется поиск кратчайшего пути из вершины v во все остальные вершины на графе.
Невзвешенный ориентированный граф[править | править код]
| Алгоритм | Сложность | Автор |
|---|---|---|
| Поиск в ширину | O(V+E) |
Ориентированный граф с неотрицательными весами[править | править код]
| Алгоритм | Сложность | Автор |
|---|---|---|
| – | O(V2EL) | Форд 1956 |
| Алгоритм Беллмана — Форда | O(VE) | Беллман 1958[9], Мур 1957[10] |
| – | O(V2 log V) | Данциг 1958, Данциг 1960, Minty (cf. Pollack&Wiebenson 1960), Whiting&Hillier 1960 |
| Алгоритм Дейкстры со списком. | O(V2) | Leyzorek et al. 1957[11], Дейкстра 1959[12] |
| Алгоритм Дейкстры с модифицированной двоичной кучей | O((E + V) log V) | – |
| . . . | . . . | . . . |
| Алгоритм Дейкстры с использованием фибоначчиевой кучи | O(E + V log V) | Фридман&Тарьян 1984[13], Фридман&Тарьян 1987[14] |
| – | O(E log log L) | Джонсон 1982, Карлссон&Поблете 1983 |
| Алгоритм Габова | O(E logE/V L) | Габов 1983, Габов 1985 |
| – | O(E + V√log L) | Ахуджа et al. 1990 |
Ориентированный граф с произвольными весами[править | править код]
| Алгоритм | Сложность | Автор |
|---|---|---|
| Алгоритм Беллмана — Форда | O(VE) | Беллман[9], Мур[10] |
| Алгоритм Левита | O(VE) |
Задача о кратчайшем пути между всеми парами вершин[править | править код]
Задача о кратчайшем пути между всеми парами вершин для невзвешенного ориентированного графа была поставлена Симбелом в 1953 году[15], который обнаружил, что она может быть решена за линейное количество манипуляций (умножения) с матрицей. Сложность такого алгоритма O(V4).
Так же для решения данной задачи существуют другие более быстрые алгоритмы, такие как Алгоритм Флойда — Уоршелла со сложностью O(V3), и
Алгоритм Джонсона (является комбинацией алгоритмов Бэллмана-Форда и Дейкстры) со сложностью O(VE + V2 log V).
Применение[править | править код]
Задача о поиске кратчайшего пути на графе может быть интерпретирована по-разному и применяться в различных областях. Далее приведены примеры различных применений задачи. Другие применения изучаются в дисциплине, которая занимается исследованием операций[16].
Картографические сервисы[править | править код]
Алгоритмы нахождения кратчайшего пути на графе применяются для нахождения путей между физическими объектами на таких картографических сервисах, как карты Google или OpenStreetMap. В обучающем видео от Google можно узнать различные эффективные алгоритмы, которые применяются в данной сфере[17].
Недетерминированная машина[править | править код]
Если представить недетерминированную абстрактную машину как граф, где вершины описывают состояния, а ребра определяют возможные переходы, тогда алгоритмы поиска кратчайшего пути могут быть применены для поиска оптимальной последовательности решений для достижения главной цели. Например, если вершинами являются состояния Кубика Рубика, а ребром представляет собой одно действие над кубиком, тогда алгоритм может быть применён для поиска решения с минимальным количеством ходов.
Сети дорог[править | править код]
Задача поиска кратчайшего пути на графе широко используется при определении наименьшего расстояния в сети дорог.
Сеть дорог можно представить в виде графа с положительными весами. Вершины являются дорожными развязками, а ребра дорогами, которые их соединяют. Веса рёбер могут соответствовать протяжённости данного участка, времени необходимому для его преодоления или стоимости путешествия по нему. Ориентированные ребра можно использовать для представления односторонних улиц. В таком графе можно ввести характеристику, которая указывает на то, что одни дороги важнее других для длительных путешествий (например автомагистрали). Она была формализована в понятии (идее) о магистралях[18].
Для реализации подхода, где одни дороги важнее других, существует множество алгоритмов. Они решают задачу поиска кратчайшего пути намного быстрее, чем аналогичные на обычных графах.
Подобные алгоритмы состоят из двух этапов:
- этап предобработки. Производится предварительная обработка графа без учёта начальной и конечной вершины (может длиться до нескольких дней, если работать с реальными данными). Обычно выполняется один раз и потом используются полученные данные.
- этап запроса. Осуществляется запрос и поиск кратчайшего пути, при этом известны начальная и конечная вершина.
Самый быстрый алгоритм может решить данную задачу на дорогах Европы или Америки за доли микросекунды[19].
Другие подходы (техники), которые применяются в данной сфере:
- ALT
- Arc Flags
- Contraction hierarchies
- Transit Node Routing
- Reach based Pruning
- Labeling
Похожие задачи[править | править код]
Существуют задачи, которые похожи на задачу поиска кратчайшего пути на графе.
- Поиск кратчайшего пути в вычислительной геометрии (см. евклидов кратчайший путь).
- Задача коммивояжёра. Требуется найти кратчайший маршрут, проходящий через указанные города (вершины) хотя бы по одному разу с последующим возвратом в исходный город. Данная задача относится к классу NP-трудных задач в отличие от задачи поиска кратчайшего пути, которая может быть решена за полиномиальное время в графах без циклов. Задача коммивояжёра решается неэффективно для больших наборов данных.
- Задача канадского путешественника и задача стохастического поиска кратчайшего пути являются обобщением рассматриваемой задачи, в которых обходимый граф заранее полностью неизвестен и изменяется во времени или следующий проход по графу вычисляется на основе вероятностей.
- Задача поиска кратчайшего пути, когда в графе происходят преобразования. Например, изменяется вес ребра или удаляется вершина[20].
Постановка задачи линейного программирования[править | править код]
Пусть дан направленный граф (V, A), где V — множество вершин и A — множество рёбер, с начальной вершиной обхода s, конечной t и весами wij для каждого ребра (i, j) в A. Вес каждого ребра соответствует переменной программы xij.
Тогда задача ставится следующим образом: найти минимум функции 


См. также[править | править код]
- IEEE 802.1aq
- Транспортная сеть
- Двунаправленный поиск
Примечания[править | править код]
- ↑ Применение теории графов в программировании, 1985.
- ↑ Применение теории графов в программировании, 1985, с. 138—139.
- ↑ Применение теории графов в программировании, 1985, с. 139—142.
- ↑ Применение теории графов в программировании, 1985, с. 144—145.
- ↑ Применение теории графов в программировании, 1985, с. 145—148.
- ↑ 1 2 Дискретная математика. Комбинаторная оптимизация на графах, 2003.
- ↑ Применение теории графов в программировании, 1985, с. 130—131.
- ↑ Cherkassky, Goldberg, Radzik, 1996.
- ↑ 1 2 Bellman Richard, 1958.
- ↑ 1 2 Moore, 1957.
- ↑ M. Leyzorek, 1957.
- ↑ Dijkstra, 1959.
- ↑ Michael Fredman Lawrence, 1984.
- ↑ Fredman Michael, 1987.
- ↑ Shimbel, 1953.
- ↑ Developing algorithms and software for geometric path planning problems, 1996.
- ↑ Fast route planning.
- ↑ Highway Dimension, 2010.
- ↑ A Hub-Based Labeling Algorithm, 2011.
- ↑ Ladyzhensky Y., Popoff Y. Algorithm, 2006.
Литература[править | править код]
- Евстигнеев В. А. Глава 3. Итеративные алгоритмы глобального анализа графов. Пути и покрытия // Применение теории графов в программировании / Под ред. А. П. Ершова. — Москва: Наука. Главная редакция физико-математической литературы, 1985. — С. 138—150. — 352 с.
- Алексеев В.Е., Таланов В.А. Глава 3.4. Нахождения кратчайших путей в графе // Графы. Модели вычислений. Структуры данных. — Нижний Новгород: Издательство Нижегородского гос. университета, 2005. — С. 236—237. — 307 с. — ISBN 5–85747–810–8. Архивная копия от 13 декабря 2013 на Wayback Machine
- Галкина В.А. Глава 4. Построение кратчайших путей в ориентированном графе // Дискретная математика. Комбинаторная оптимизация на графах. — Москва: Издательство “Гелиос АРВ”, 2003. — С. 75—94. — 232 с. — ISBN 5–85438–069–2.
- Берж К. Глава 7. Задача о кратчайшем пути // Теория графов и её применения = Theorie des graphes et ses applications / Под ред. И. А. Вайнштейна. — Москва: Издательство иностранной литературы, 1962. — С. 75—81. — 320 с.
- Ойстин Оре. Теория графов / Под ред. И. М. Овчинниковой. — Издательство наука, 1980. — 336 с. Архивная копия от 15 декабря 2013 на Wayback Machine
- Виталий Осипов, Поиск кратчайших путей в дорожных сетях: от теории к реализации на YouTube.
- Харари Ф. Глава 2. Графы // Теория графов / под ред. Г. П. Гаврилов — М.: Мир, 1973. — С. 27. — 301 с.
- Cherkassky B. V., Goldberg A. V., Radzik T. Shortest paths algorithms: Theory and experimental evaluation (англ.) // Mathematical Programming — Springer Science+Business Media, 1996. — Vol. 73, Iss. 2. — P. 129–174. — ISSN 0025-5610; 1436-4646 — doi:10.1007/BF02592101
- Ричард Беллман. On a routing problem // Quarterly of Applied Mathematics. — 1958. — Т. 16. — С. 87—90.
- Dijkstra E. W. A note on two problems in connexion with graphs (англ.) // Numerische Mathematik / F. Brezzi — Springer Science+Business Media, 1959. — Vol. 1, Iss. 1. — P. 269—271. — ISSN 0029-599X; 0945-3245 — doi:10.1007/BF01386390
- Moore E. F. The shortest path through a maze (англ.) // Proceedings of an International Symposium on the Theory of Switching (Cambridge, Massachusetts, 2–5 April 1957) — Harvard University Press, 1959. — Vol. 2. — P. 285—292. — 345 p. — (Annals of the Computation Laboratory of Harvard University; Vol. 30) — ISSN 0073-0750
- M. Leyzorek, R. S. Gray, A. A. Gray, W. C. Ladew, S. R. Meaker, R. M. Petry, R. N. Seitz. Investigation of Model Techniques — First Annual Report — 6 June 1956 — 1 July 1957 — A Study of Model Techniques for Communication Systems (англ.). — Cleveland, Ohio: Case Institute of Technology, 1957.
- Michael Fredman Lawrence, Роберт Андре Тарьян. Fibonacci heaps and their uses in improved network optimization algorithms (англ.) : journal. — Институт инженеров электротехники и электроники, 1984. — P. 338—346. — ISBN 0-8186-0591-X. — doi:10.1109/SFCS.1984.715934. Архивировано 11 октября 2012 года.
- Michael Fredman Lawrence, Роберт Андре Тарьян. Fibonacci heaps and their uses in improved network optimization algorithms (англ.) // Journal of the Association for Computing Machinery : journal. — 1987. — Vol. 34, no. 3. — P. 596—615. — doi:10.1145/28869.28874.
- Shimbel, Alfonso. Structural parameters of communication networks // Bulletin of Mathematical Biophysics. — 1953. — Т. 15, № 4. — С. 501—507. — doi:10.1007/BF02476438.
- Sanders, Peter. Fast route planning. — Google Tech Talk, 2009. — 23 марта.. — «Шаблон:Inconsistent citations».
- Chen, Danny Z. Developing algorithms and software for geometric path planning problems (англ.) // ACM Computing Surveys (англ.) (рус. : journal. — 1996. — December (vol. 28, no. 4es). — P. 18. — doi:10.1145/242224.242246.
- Abraham, Ittai; Fiat, Amos; Goldberg, Andrew V.; Werneck, Renato F. Highway Dimension, Shortest Paths, and Provably Efficient Algorithms (англ.) // ACM-SIAM Symposium on Discrete Algorithms : journal. — 2010. — P. 782—793.
- Abraham, Ittai; Delling, Daniel; Goldberg, Andrew V.; Werneck, Renato F. A Hub-Based Labeling Algorithm for Shortest Paths on Road Networks. Symposium on Experimental Algorithms] (англ.) : journal. — 2011. — P. 230—241.
- Kroger, Martin. Shortest multiple disconnected path for the analysis of entanglements in two- and three-dimensional polymeric systems (англ.) // Computer Physics Communications (англ.) (рус. : journal. — 2005. — Vol. 168, no. 168. — P. 209—232. — doi:10.1016/j.cpc.2005.01.020.
- Ladyzhensky Y., Popoff Y. Algorithm to define the shortest paths between all nodes in a graph after compressing of two nodes. Proceedings of Donetsk national technical university, Computing and automation. Vol.107. Donetsk (англ.) : journal. — 2006. — P. 68—75..[источник не указан 925 дней]
import java.util.ArrayList;
import java.util.HashSet;
import java.util.List;
import java.util.Set;
class Pair {
int first, second;
public Pair(int first, int second)
{
this.first = first;
this.second = second;
}
}
public class GFG {
static final int infi = 1000000000;
static class Node {
int vertexNumber;
List<Pair> children;
Node(int vertexNumber)
{
this.vertexNumber = vertexNumber;
children = new ArrayList<>();
}
void add_child(int vNumber, int length)
{
Pair p = new Pair(vNumber, length);
children.add(p);
}
}
static int[] dijkstraDist(List<Node> g, int s,
int[] path)
{
int[] dist = new int[g.size()];
boolean[] visited = new boolean[g.size()];
for (int i = 0; i < g.size(); i++) {
visited[i] = false;
path[i] = -1;
dist[i] = infi;
}
dist[s] = 0;
path[s] = -1;
int current = s;
Set<Integer> sett = new HashSet<>();
while (true) {
visited[current] = true;
for (int i = 0;
i < g.get(current).children.size(); i++) {
int v
= g.get(current).children.get(i).first;
if (visited[v])
continue;
sett.add(v);
int alt = dist[current]
+ g.get(current)
.children.get(i)
.second;
if (alt < dist[v]) {
dist[v] = alt;
path[v] = current;
}
}
sett.remove(current);
if (sett.isEmpty())
break;
int minDist = infi;
int index = 0;
for (int a : sett) {
if (dist[a] < minDist) {
minDist = dist[a];
index = a;
}
}
current = index;
}
return dist;
}
void printPath(int[] path, int i, int s)
{
if (i != s) {
if (path[i] == -1) {
System.out.println("Path not found!!");
return;
}
printPath(path, path[i], s);
System.out.print(path[i] + " ");
}
}
public static void main(String[] args)
{
List<Node> v = new ArrayList<>();
int n = 4, s = 0, e = 5;
for (int i = 0; i < n; i++) {
Node a = new Node(i);
v.add(a);
}
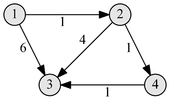
v.get(0).add_child(1, 1);
v.get(0).add_child(2, 4);
v.get(1).add_child(2, 2);
v.get(1).add_child(3, 6);
v.get(2).add_child(3, 3);
int[] path = new int[v.size()];
int[] dist = dijkstraDist(v, s, path);
for (int i = 0; i < dist.length; i++) {
if (dist[i] == infi) {
System.out.printf("%d and %d are not "
+ "connectedn",
i, s);
continue;
}
System.out.printf(
"Distance of %dth vertex "
+ "from source vertex %d is: %dn",
i, s, dist[i]);
}
}
}
Кратчайшие пути в графах. BFS. Dijkstra.
Задача
Дан ориентированный граф $G = (V, E)$, а также вершина $s$.
Найти длину кратчайшего пути от $s$ до каждой из вершин графа. Длина пути — количество рёбер в нём.
BFS
BFS — breadth-first search, или же поиск в ширину.
Этот алгоритм позволяет решать следующую задачу.
Алгоритм работает следующим образом.
- Создадим массив $dist$ расстояний. Изначально $dist[s] = 0$ (поскольку расстояний от вершины до самой себя равно $0$) и $dist[v] = infty$ для $v neq s$.
- Создадим очередь $q$. Изначально в $q$ добавим вершину $s$.
- Пока очередь $q$ непуста, делаем следующее:
- Извлекаем вершину $v$ из очереди.
- Рассматриваем все рёбра $(v, u) in E$. Для каждого такого ребра пытаемся сделать релаксацию: если $dist[v] + 1 < dist[u]$, то мы делаем присвоение $dist[u] = dist[v] + 1$ и добавляем вершину $u$ в очередь.
Визуализации:
-
https://visualgo.net/mn/dfsbfs
-
https://www.hackerearth.com/practice/algorithms/graphs/breadth-first-search/visualize/
Интуитивное понимание алгоритма
Можно представить, что мы поджигаем вершину $s$. Каждый шаг алгоритма — это распространение огня на соседние вершины. Понятно, что огонь доберётся до вершины по кратчайшему пути.
Заметьте, что этот алгоритм очень похож на DFS — достаточно заменить очередь на стек и поиск в ширину станет поиском в глубину. Действительно, оба алгоритма при обработке вершины просто записывают всех непосещенных соседей, в которые из неё есть ребро, в структуру данных, и после этого выбирает следующую вершину для обработки в структуре данных. В DFS это стек (благодаря рекурсии), поэтому мы сначала записываем соседа, идем в обрабатываем его полностью, а потом начинаем обрабатывать следующего соседа. В BFS это очередь, поэтому мы кидаем сразу всех соседей, а потом начинаем обрабатывать вообще другую вершину – ту непосещенную, которую мы положили в очередь раньше всего.
Оба алгоритма позволяют обойти граф целиком – посетить каждую вершину ровно один раз. Поэтому они оба подходят для таких задач как:
- поиск компонент связности
- проверка графа на двудольность
- построение остова
Реализация на C++
n — количество вершин в графе; adj — список смежности
vector<int> bfs(int s) { // длина любого кратчайшего пути не превосходит n - 1, // поэтому n - достаточное значение для "бесконечности"; // после работы алгоритма dist[v] = n, если v недостижима из s vector<int> dist(n, n); dist[s] = 0; queue<int> q; q.push(s); while (!q.empty()) { int v = q.front(); q.pop(); for (int u : adj[v]) { if (dist[u] > dist[v] + 1) { dist[u] = dist[v] + 1; q.push(u); } } } return dist; }
Свойства кратчайших путей
Обозначение: $d(v)$ — длина кратчайшего пути от $s$ до $v$.
Лемма 1.
Пусть $(u, v) in E$, тогда $d(v) leq d(u) + 1$.
Действительно, существует путь из $s$ в $u$ длины $d(u)$, а также есть ребро $(u, v)$, следовательно, существует путь из $s$ в $v$ длины $d(u) + 1$. А значит кратчайший путь из $s$ в $v$ имеет длину не более $d(u) + 1$,
Лемма 2.
Рассмотрим кратчайший путь от $s$ до $v$. Обозначим его как $u_1, u_2, dots u_k$ ($u_1 = s$ и $u_k = v$, а также $k = d(v) + 1$).
Тогда $forall (i < k): d(u_i) + 1 = d(u_{i + 1})$.
Действительно, пусть для какого-то $i < k$ это не так. Тогда, используя лемму 1, имеем: $d(u_i) + 1 > d(u_{i + 1})$. Тогда мы можем заменить первые $i + 1$ вершин пути на вершины из кратчайшего пути из $s$ в $u_{i + 1}$. Полученный путь стал короче, но мы рассматривали кратчайший путь — противоречие.
Корректность
Утверждение.
- Расстояния до тех вершин, которые были добавлены в очередь, посчитаны корректно.
- Вершины лежат в очереди в порядке неубывания расстояния, притом разность между кратчайшими расстояними до вершин в очереди не превосходит $1$.
Докажем это по индукции по количеству итераций алгоритма (итерация — извлечение вершины из очереди и дальнейшая релаксация).
База очевидна.
Переход. Сначала докажем первую часть. Предположим, что $dist[v] + 1 < dist[u]$, но $dist[v] + 1$ — некорректное расстояние до вершины $u$, то есть $dist[v] + 1 neq d(u)$. Тогда по лемме 1: $d(u) < dist[v] + 1$. Рассмотрим предпоследнюю вершину $w$ на кратчайшем пути от $s$ до $u$. Тогда по лемме 2: $d(w) + 1 = d(u)$. Следовательно, $d(w) + 1 < dist[v] + 1$ и $d(w) < dist[v]$. Но тогда по предположению индукции $w$ была извлечена раньше $v$, следовательно, при релаксации из неё в очередь должна была быть добавлена вершина $u$ с уже корректным расстоянием. Противоречие.
Теперь докажем вторую часть. По предположению индукции в очереди лежали некоторые вершины $u_1, u_2, dots u_k$, для которых выполнялось следующее: $dist[u_1] leq dist[u_2] leq dots leq dist[u_k]$ и $dist[u_k] – dist[u_1] leq 1$. Мы извлекли вершину $v = u_1$ и могли добавить в конец очереди какие-то вершины с расстоянием $dist[v] + 1$. Если $k = 1$, то утверждение очевидно. В противном случае имеем $dist[u_k] – dist[u_1] leq 1 leftrightarrow dist[u_k] – dist[v] leq 1 leftrightarrow dist[u_k] leq dist[v] + 1$, то есть упорядоченность сохранилась. Осталось показать, что $(dist[v] + 1) – dist[u_2] leq 1$, но это равносильно $dist[v] leq dist[u_2]$, что, как мы знаем, верно.
Время работы
Из доказанного следует, что каждая достижимая из $s$ вершина будет добавлена в очередь ровно $1$ раз, недостижимые вершины добавлены не будут. Каждое ребро, соединяющее достижимые вершины, будет рассмотрено ровно $2$ раза. Таким образом, алгоритм работает за $O(V+ E)$ времени, при условии, что граф хранится в виде списка смежности.
Неориентированные графы
Если дан неориентированный граф, его можно рассматривать как ориентированный граф с двумя обратными друг другу ориентированными рёбрами.
Восстановление пути
Пусть теперь заданы 2 вершины $s$ и $t$, и необходимо не только найти длину кратчайшего пути из $s$ в $t$, но и восстановить какой-нибудь из кратчайших путей между ними. Всё ещё можно воспользоваться алгоритмом BFS, но необходимо ещё и поддерживать массив предков $p$, в котором для каждой вершины будет храниться предыдущая вершина на кратчайшем пути.
Поддерживать этот массив просто: при релаксации нужно просто запоминать, из какой вершины мы прорелаксировали в данную. Также будем считать, что $p[s] = -1$: у стартовой вершины предок — некоторая несуществующая вершина.
Восстановление пути делается с конца. Мы знаем последнюю вершину пути — это $t$. Далее, мы сводим задачу к меньшей, переходя к нахождению пути из $s$ в $p[t]$.
Реализация BFS с восстановлением пути
// теперь bfs принимает 2 вершины, между которыми ищется пути // bfs возвращает кратчайший путь из s в t, или же пустой vector, если пути нет vector<int> bfs(int s, int t) { vector<int> dist(n, n); vector<int> p(n, -1); dist[s] = 0; queue<int> q; q.push(s); while (!q.empty()) { int v = q.front(); q.pop(); for (int u : adj[v]) { if (dist[u] > dist[v] + 1) { p[u] = v; dist[u] = dist[v] + 1; q.push(u); } } } // если пути не существует, возвращаем пустой vector if (dist[t] == n) { return {}; } vector<int> path; while (t != -1) { path.push_back(t); t = p[t]; } // путь был рассмотрен в обратном порядке, поэтому его нужно перевернуть reverse(path.begin(), path.end()); return path; }
Проверка принадлежности вершины кратчайшему пути
Дан ориентированный граф $G$, найти все вершины, которые принадлежат хотя бы одному кратчайшему пути из $s$ в $t$.
Запустим из вершины $s$ в графе $G$ BFS — найдём расстояния $d_1$. Построим транспонированный граф $G^T$ — граф, в котором каждое ребро заменено на противоположное. Запустим из вершины $t$ в графе $G^T$ BFS — найдём расстояния $d_2$.
Теперь очевидно, что $v$ принадлежит хотя бы одному кратчайшему пути из $s$ в $t$ тогда и только тогда, когда $d_1(v) + d_2(v) = d_1(t)$ — это значит, что есть путь из $s$ в $v$ длины $d_1(v)$, а затем есть путь из $v$ в $t$ длины $d_2(v)$, и их суммарная длина совпадает с длиной кратчайшего пути из $s$ в $t$.
Кратчайший цикл в ориентированном графе
Найти цикл минимальной длины в ориентированном графе.
Попытаемся из каждой вершины найти кратчайший цикл, проходящий через неё, с помощью BFS. Это делается аналогично обычному BFS: мы должны найти расстояний от вершины до самой себя, при этом не считая, что оно равно $0$.
Итого, у нас $|V|$ запусков BFS, и каждый запуск работает за $O(|V| + |E|)$. Тогда общее время работы составляет $O(|V|^2 + |V| |E|)$. Если инициализировать массив $dist$ единожды, а после каждого запуска BFS возвращать исходные значения только для достижимых вершин, решение будет работать за $O(|V||E|)$.
Задача
Дан взвешенный ориентированный граф $G = (V, E)$, а также вершина $s$. Длина ребра $(u, v)$ равна $w(u, v)$. Длины всех рёбер неотрицательные.
Найти длину кратчайшего пути от $s$ до каждой из вершин графа. Длина пути — сумма длин рёбер в нём.
Алгоритм Дейкстры
Алгоритм Дейкстры решает приведённую выше задачу. Он работает следующим образом.
- Создать массив $dist$ расстояний. Изначально $dist[s] = 0$ и $dist[v] = infty$ для $v neq s$.
- Создать булёв массив $used$, $used[v] = 0$ для всех вершин $v$ — в нём мы будем отмечать, совершалась ли релаксация из вершины.
- Пока существует вершина $v$ такая, что $used[v] = 0$ и $dist[v] neq infty$, притом, если таких вершин несколько, то $v$ — вершина с минимальным $dist[v]$, делать следующее:
- Пометить, что мы совершали релаксацию из вершины $v$, то есть присвоить $used[v] = 1$.
- Рассматриваем все рёбра $(v, u) in E$. Для каждого ребра пытаемся сделать релаксацию: если $dist[v] + w(v, u) < dist[u]$, присвоить $dist[u] = dist[v] + w(v, u)$.
Иными словами, алгоритм на каждом шаге находит вершину, до которой расстояние сейчас минимально и из которой ещё не была произведена релаксация, и делает её.
Посчитаем, за сколько работает алгоритм. Мы $V$ раз ищем вершину минимальным $dist$, поиск минимума у нас линейный за $O(V)$, отсюда $O(V^2)$. Обработка ребер у нас происходит суммарно за $O(E)$, потому что на каждое ребро мы тратим $O(1)$ действий. Так мы находим финальную асимптотику: $O(V^2 + E)$.
Реализация на C++
Рёбра будем хранить как pair<int, int>, где первое число пары — куда оно ведёт; а второе — длина ребра.
// INF - infinity - бесконечность const long long INF = (long long) 1e18 + 1; vector<long long> dijkstra(int s) { vector<long long> dist(n, INF); dist[s] = 0; vector<bool> used(n); while (true) { // находим вершину, из которой будем релаксировать int v = -1; for (int i = 0; i < n; i++) { if (!used[i] && (v == -1 || dist[i] < dist[v])) { v = i; } } // если не нашли подходящую вершину, прекращаем работу алгоритма if (v == -1) { break; } for (auto &e : adj[v]) { int u = e.first; int len = e.second; if (dist[u] > dist[v] + len) { dist[u] = dist[v] + len; } } } return dist; }
Восстановление пути
Восстановление пути в алгоритме Дейкстры делается аналогично восстановлению пути в BFS (и любой динамике).
Дейкстра на сете
Искать вершину с минимальным $dist$ можно гораздо быстрее, используя такую структуру данных как очередь с приоритетом. Нам нужно хранить пары $(dist, index)$ и уметь делать такие операции:
- Извлечь минимум (чтобы обработать новую вершину)
- Удалить вершину по индексу (чтобы уменьшить $dist$ до какого-то соседа)
- Добавить новую вершину (чтобы уменьшить $dist$ до какого-то соседа)
Для этого используют, например, кучу или сет. Удобно помимо сета хранить сам массив dist, который его дублирует, но хранит элементы по порядку. Тогда, чтобы заменить значение $(dist_1, u)$ на $(dist_2, u)$, нужно удалить из сета значение $(dist[u], u)$, сделать $dist[u] = dist_2;$ и добавить в сет $(dist[u], u)$.
Данный алгоритм будет работать за $V O(log V)$ извлечений минимума и $O(E log V)$ операций уменьшения расстояния до вершины (может быть сделано после каждого ребра). Поэтому алгоритм работает за $O(E log V)$.
Заметьте, что этот алгоритм не лучше и не хуже, чем без сета, который работает за $O(V^2 + E)$. Ведь если $E = O(V^2)$ (граф почти полный), то Дейкстра без сета работает быстрее, а если, наример, $E = O(V)$, то Дейкстра на сете работает быстрее. Учитывайте это, когда выбираете алгоритм.
Алгоритм Флойда (алгоритм Флойда–Уоршелла) — алгоритм нахождения длин кратчайших путей между всеми парами вершин во взвешенном ориентированном графе. Работает корректно, если в графе нет циклов отрицательной величины, а в случае, когда такой цикл есть, позволяет найти хотя бы один такой цикл. Алгоритм работает за времени и использует памяти. Разработан в 1962 году.
Содержание
- 1 Алгоритм
- 1.1 Постановка задачи
- 1.2 Описание
- 1.3 Код (в первом приближении)
- 1.4 Код (окончательный)
- 1.5 Пример работы
- 2 Вывод кратчайшего пути
- 2.1 Модифицированный алгоритм
- 3 Нахождение отрицательного цикла
- 4 Построение транзитивного замыкания
- 4.1 Псевдокод
- 4.2 Доказательство
- 4.3 Оптимизация с помощью битовых масок
- 5 Источники информации
Алгоритм
Постановка задачи
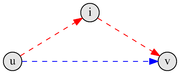
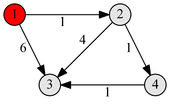
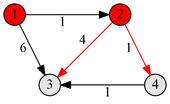
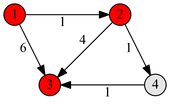
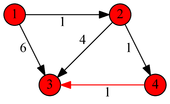
Текущий (синий) путь и потенциально более короткий (красный)
Дан взвешенный ориентированный граф , в котором вершины пронумерованы от до .
Требуется найти матрицу кратчайших расстояний , в которой элемент либо равен длине кратчайшего пути из в , либо равен , если вершина не достижима из .
Описание
Обозначим длину кратчайшего пути между вершинами и , содержащего, помимо и , только вершины из множества как , .
На каждом шаге алгоритма, мы будем брать очередную вершину (пусть её номер — ) и для всех пар вершин и вычислять . То есть, если кратчайший путь из в , содержащий только вершины из множества , проходит через вершину , то кратчайшим путем из в является кратчайший путь из в , объединенный с кратчайшим путем из в . В противном случае, когда этот путь не содержит вершины , кратчайший путь из в , содержащий только вершины из множества является кратчайшим путем из в , содержащим только вершины из множества .
Код (в первом приближении)
for
for
for
В итоге получаем, что матрица и является искомой матрицей кратчайших путей, поскольку содержит в себе длины кратчайших путей между всеми парами вершин, имеющих в качестве промежуточных вершин вершины из множества , что есть попросту все вершины графа. Такая реализация работает за времени и использует памяти.
Код (окончательный)
Утверждается, что можно избавиться от одной размерности в массиве , т.е. использовать двумерный массив . В процессе работы алгоритма поддерживается инвариант , а, поскольку, после выполнения работы алгоритма , то тогда будет выполняться и .
| Утверждение: |
|
В течение работы алгоритма Флойда выполняются неравенства: . |
|
После инициализации все неравенства, очевидно, выполняются. Далее, массив может измениться только в строчке 5. Докажем второе неравенство индукцией по итерациям алгоритма. Пусть также — значение сразу после итерации. Покажем, что , зная, что . Рассмотрим два случая:
Докажем первое неравенство от противного. Пусть неравенство было нарушено, рассмотрим момент, когда оно было нарушено впервые. Пусть это была -ая итерация и в этот момент изменилось значение и выполнилось . Так как изменилось, то (так как ранее ) (по неравенству треугольника) . Итак — противоречие. |
func floyd(w):
d = // изначально
for
for
for
d[u][v] = min(d[u][v], d[u][i] + d[i][v])
Данная реализация работает за время , но требует уже памяти. В целом, алгоритм Флойда очень прост, и, поскольку в нем используются только простые операции, константа, скрытая в определении весьма мала.
Пример работы
 |
 |
 |
 |
|
Вывод кратчайшего пути
Алгоритм Флойда легко модифицировать таким образом, чтобы он возвращал не только длину кратчайшего пути, но и сам путь. Для этого достаточно завести дополнительный массив , в котором будет храниться номер вершины, в которую надо пойти следующей, чтобы дойти из в по кратчайшему пути.
Модифицированный алгоритм
func floyd(w):
d = // изначально
for
for
for
if d[u][i] + d[i][v] < d[u][v]
d[u][v] = d[u][i] + d[i][v]
next[u][v] = next[u][i]
func getShortestPath(u, v):
if d[u][v] ==
print "No path found" // между вершинами u и v нет пути
c = u
while c != v
print c
c = next[c][v]
print v
Нахождение отрицательного цикла
| Утверждение: |
|
При наличии цикла отрицательного веса в матрице появятся отрицательные числа на главной диагонали. |
| Так как алгоритм Флойда последовательно релаксирует расстояния между всеми парами вершин , в том числе и теми, у которых , а начальное расстояние между парой вершин равно нулю, то релаксация может произойти только при наличии вершины такой, что , что эквивалентно наличию отрицательного цикла, проходящего через вершину . |
Из доказательства следует, что для поиска цикла отрицательного веса необходимо, после завершения работы алгоритма, найти вершину , для которой , и вывести кратчайший путь между парой вершин . При этом стоит учитывать, что при наличии отрицательного цикла расстояния могут уменьшаться экспоненциально. Для предотвращения переполнения все вычисления стоит ограничивать снизу величиной , либо проверять наличие отрицательных чисел на главной диагонали во время подсчета.
Построение транзитивного замыкания
Сформулируем нашу задачу в терминах графов: рассмотрим граф , соответствующий отношению . Тогда необходимо найти все пары вершин , соединенных некоторым путем.
Иными словами, требуется построить новое отношение , которое будет состоять из всех пар таких, что найдется последовательность , где .
Псевдокод
Изначально матрица заполняется соответственно отношению , то есть . Затем внешним циклом перебираются все элементы множества и для каждого из них, если он может использоваться, как промежуточный для соединения двух элементов и , отношение расширяется добавлением в него пары .
for k = 1 to n
for i = 1 to n
for j = 1 to n
W[i][j] = W[i][j] or (W[i][k] and W[k][j])
Доказательство
<wikitex>Назовем промежуточной вершину некоторого пути $p = left langle v_0, v_1, dots, v_k right rangle$, принадлежащую множеству вершин этого пути и отличающуюся от начальной и конечной вершин, то есть принадлежащую $left { v_1, v_2, dots, v_{k-1} right }$. Рассмотрим произвольную пару вершин $i, j in V$ и все пути между ними, промежуточные вершины которых принадлежат множеству вершин с номерами $left { 1, 2, dots, k right }$. Пусть $p$ — некоторый из этих путей. Докажем по индукции (по числу промежуточных вершин в пути), что после $i$-ой итерации внешнего цикла будет верно утверждение — если в построенном графе между выбранной парой вершин есть путь, содержащий в качестве промежуточных только вершины из множества вершин с номерами $left { v_1, v_2, dots, v_{i} right }$, то между ними будет ребро.
- База индукции. Если у нас нет промежуточных вершин, что соответствует начальной матрице смежности, то утверждение выполнено: либо есть ребро (путь не содержит промежуточных вершин), либо его нет.
- Индуктивный переход. Пусть предположение выполнено для $i = k – 1$. Докажем, что оно верно и для $i = k$ Рассмотрим случаи (далее под вершиной будем понимать ее номер для простоты изложения):
- $k$ не является промежуточной вершиной пути $p$. Тогда все его промежуточные пути принадлежат множеству вершин с номерами $left { 1, 2, dots, k-1 right } subset left { 1, 2, dots, k right }$, то есть существует путь с промежуточными вершинами в исходном множестве. Это значит $W[i][j]$ будет истиной. В противном случае $W[i][j]$ будет ложью и на k-ом шаге ею и останется.
- $k$ является промежуточной вершиной предполагаемого пути $p$. Тогда этот путь можно разбить на два пути: $i xrightarrow{p_1} k xrightarrow{p_2} j$. Пусть как $p_1$, так и $p_2$ существуют. Тогда они содержат в качестве промежуточных вершины из множества $left { 1, 2, dots, k-1 right } subset left { 1, 2, dots, k right }$ (так как вершина $k$ — либо конечная, либо начальная, то она не может быть в множестве по нашему определению). Тогда $W[i][k]$ и $W[k][j]$ истинны и по индуктивному предположению посчитаны верно. Тогда и $W[i][j]$ тоже истина. Пусть какого-то пути не существует. Тогда пути $p$ тоже не может существовать, так как добраться, например, от вершины $i$ до $k$ по вершинам из множества $left { 1, 2, dots, k right }$ невозможно по индуктивному предположению. Тогда вся конъюнкция будет ложной, то есть такого пути нет, откуда $W[i][j]$ после итерации будет ложью.
Таким образом, после завершения внешнего цикла у нас будет $W[i][j] = true$, если между этими вершинами есть путь, содержащий в качестве промежуточных вершин из множества всех остальных вершин графа, что и есть транзитивное замыкание.
</wikitex>
Оптимизация с помощью битовых масок
Строки матрицы можно хранить с помощью массива битовых масок длиной . Тогда последний цикл будет выполняться в раз быстрее и сложность алгоритма снижается до .
Пример реализации оптимизации с помощью битмасок:
unsigned int W[N][N / 32 + 1]
func transitiveClosure(W):
for k = 1 to n
for i = 1 to n
if бит с номером (k % 32) в маске a[i][k / 32] единичный
for j = 1 to n / 32 + 1
W[i][j] = W[i][j] or W[k][j]
В данной реализации длина битовой маски равна битам. Последний цикл делает в раза меньше операций — сложность алгоритма .
Источники информации
- Томас Х. Кормен, Чарльз И. Лейзерсон, Рональд Л. Ривест, Клиффорд Штайн Алгоритмы: построение и анализ — 2-е изд — М.: Издательский дом «Вильямс», 2009. — ISBN 978-5-8459-0857-5.
- Романовский И. В. Дискретный анализ: Учебное пособие для студентов, специализирующихся по прикладной математике и информатике. Изд. 3-е. — СПб.: Невский диалект, 2003. — 320 с. — ISBN 5-7940-0114-3.
- Википедия – Алгоритм Флойда — Уоршелла
- Wikipedia – Floyd–Warshall algorithm
