Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 1 сентября 2014 года; проверки требуют 24 правки.

Механическая характеристика асинхронной машины: а — режим рекуперации энергии в сеть (генераторный режим), б — двигательный режим, в — режим противовключения (режим электромагнитного тормоза).
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.

где 


где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода[править | править код]
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
.
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения
Следует заметить, что так же существует режим идеального холостого хода, при котором 

Генераторный режим[править | править код]
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой 

Режим торможения противовключением[править | править код]
В режиме электромагнитного торможения частота вращения ротора является отрицательной, поэтому скольжение принимает положительные значения больше единицы
![{displaystyle s=[n_{1}-(-n)]/n_{1}=(n_{1}+n)/n_{1}>1}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f7dc87f3dc0378759f68eb38b2d99074d1b1340a)
Таким образом, скольжение в режиме торможения противовключением может изменяться в диапазоне 
Критическое скольжение[править | править код]
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература[править | править код]
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
Уравнение
механической характеристики АД можно
получить из рассмотрения баланса
мощности в электродвигателе.
Мощность, потребляемая
из сети,
Р1=DР0+DРМ1+РЭМ=3(Im2Rm+I2‘2R1+
I2‘2
R2S‘/S),
(1.3)
где DРМ1– потери в меди обмоток статора.
Отсюда электромагнитная
мощность равна:
 ,
,
(1.4)
где ХК=Х1+Х2’– индуктивное фазное сопротивление
короткого замыкания,
R‘2S=R‘2+R‘2ДОБ,R‘2ДОБ=R‘2ДОБ +Кr.
(1.5)
Или РЭМ=МЭМw0,
электромагнитный момент
 .
.
(1.6)
Анализ уравнения
механической характеристики (1.6)
показывает, что график зависимости М(S)
имеет два максимума – один в генераторном
режиме (скольжение отрицательно) и
другой – в двигательном (скольжение
положительно). Максимальное значение
моментаМК, развиваемого
двигателем, называют критическим, а
соответствующее ему скольжениеSК– критическим.
Критическое
скольжение определяется по следующему
выражению
 ,
,
(1.7)
Максимальный
момент, соответствующий критическому
скольжению
 (1.8)
(1.8)
В приведённых
выражениях знак плюс соответствует
двигательному режиму работы, а знак
минус – генераторному. Из полученного
выражения, определяющего максимальный
момент видно, что максимальный момент
в генераторном режиме больше, чем в
двигательном.
Если выражение,
определяющее электромагнитный момент
разделить на выражение максимального
момента (![]() )
)
и пренебречь активным сопротивлением
обмотки статора![]() ,
,
то после ряда преобразований получим
упрощённое выражение электромагнитного
момента, удобное для построения
механической характеристики (рис. 1.2,а)
асинхронного электродвигателя:
![]() (1.9)
(1.9)
Критическое
скольжение асинхронного электродвигателя
можно определить по паспортным данным
на электродвигатель:
![]() (1.10)
(1.10)
где sном– скольжение при номинальной нагрузке;![]() – перегрузочная способность электродвигателя.
– перегрузочная способность электродвигателя.
ЗависимостьM(s)приведена на рис. 1.2.

Рис. 1.2. Механические
характеристики асинхронного
электродвигателя
Из анализа полученных
уравнений видно, что регулирование
скорости вращения АД можно осуществить
изменением частоты и напряжения (рис.
1.2,г), подводимого к статору, величин
сопротивлений, вводимых в цепь ротора
(рис. 1.2,б) или статора (рис. 1.2,в) АД, а
также изменением числа пар полюсов.
Для регулируемого
электропривода важными являются не
только регулировочные свойства,
характеризуемые двигательным режимом,
но и его свойства в тормозных режимах.
В асинхронном приводе различают режимы
динамического торможения, противовключения
и рекуперативного (генераторное
торможение с отдачей энергии в сеть)
торможения.
1.1.2 Динамическое торможение
Для осуществления
динамического торможения обмотка
статора отключается от сети переменного
тока и подключается к источнику
постоянного тока (рис. 1.3). Постоянный
ток, протекающий в обмотке статора,
создает неподвижный в пространстве
магнитный поток. Величина постоянного
тока, подводимого к статору асинхронного
электродвигателя, обычно ограничивается
сопротивлением динамического торможения
RдВ обмотках
вращающегося по инерции ротора наводится
ЭДС, которая вызывает появление

Рис. 1.3. Схема
динамического торможения АД
тока в роторной
цепи. Взаимодействие тока ротора с
неподвижным магнитным потоком статора
создает тормозной момент, значение
которого определяется выражением
 ,
,
(1.11)
где IЭКВ– эквивалентный ток обмотки статора,
равный для заданной схемы включения
обмоток![]() ;
;
IП–
постоянный ток, потребляемый обмоткой
статора,IП=(2¸3)Im;
![]() – текущее значение
– текущее значение
скольжения при динамическом торможении.
Из уравнения (1.11)
видно, что момент при динамическом
торможении зависит от IЭКВ,
протекающего по обмотке статора, и
является функцией относительной скорости
вращения ротораS‘ =w.
Исследуя полученное
значение тормозного момента на экстремумы,
найдем, что МК ДТбудет иметь
место при
 ,
,
(1.12)
а значение
критического момента
 .
.
(1.13)
С учётом полученных
выражений для критического скольжения
и критического момента можно вывести
уравнение механической характеристики
для режима динамического торможения,
т. е.
![]() .
.
(1.14)
На рис. 1.4 изображены
механические характеристики при
динамическом торможении для трех
различных добавочных сопротивлений в
роторе и для двух значений постоянного
тока в цепи статора.
Из анализа кривых
(рис. 1.4) видно, что при изменении
добавочного сопротивления

Рис. 1.4. Механические
характеристики АД при динамическом
торможении
в цепи ротора
изменяется и среднее значение тормозного
момента. Следовательно, имеется
оптимальное значение сопротивления,
при котором имеет место максимальный
тормозной момент при заданном значении
постоянного тока и минимальное время
торможения.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
02.03.20165.82 Mб21Электроника. Теоретический курс(ФОЭ) М4.docx
- #
- #
- #
- #
- #
- #
Что нужно знать о скольжении асинхронного двигателя
Содержание
- 1 Устройство и принцип работы
- 2 Что такое скольжение АД
- 3 Зависимость режимов работы мотора от скольжения
- 4 Способы измерения
- 5 Видео по теме
Одним из основных электромоторов в мире является асинхронный двигатель. Чтобы его использовать в качестве привода, надо понимать, как поведет себя одна из главных переменных характеристик при пуске, изменении нагрузки на валу, колебании электронапряжения и частоты. Этот параметр называется скольжением электродвигателя.

Устройство и принцип работы
Двигатель переменного электротока, в котором скорость вращения ротора меньше скорости вращающегося электромагнитного поля статора, называется асинхронным.
Обмотки статора подключаются к сети синусоидального трехфазного электротока, после чего электромагнитный поток начинает вращаться и пересекает замкнутые токопроводящие витки подвижной части мотора. Под действием наведенной в них ЭДС возникает переменный электроток. Он создает свое магнитное поле, которое заставляет вращаться ротор с асинхронной скоростью следом за полем статора.

Статор представляет собой набранный из изолированных листов электротехнической стали корпус, в который различным способом уложены обмотки возбуждения. Ротор тоже шихтуется из изолированных листов. Они имеют пазы, в которых закрепляются штыри короткозамкнутого ротора или укладывается фазная обмотка. На концах вала ротора расположены подшипники, вставленные в торцевые крышки статора.

Короткозамкнутый ротор (его также называют «беличьей клеткой») состоит из набора стержней из алюминия или меди. По торцам они закольцованы вместе. Это наиболее простая и распространенная конструкция АД.

Мотор, ротор которого содержит 3-х фазную обмотку, называется фазным. Полноценные изолированные витки трех обмоток концами соединены вместе, а их начала выведены на контактные кольца. При помощи щеточного скользящего контакта катушки выведены на внешнее управление.

Что такое скольжение АД
Создание вращающегося магнитного поля (МП) в неподвижной части электрической машины происходит за счет разнесенных на 120 градусов по окружности корпуса витков 3-х катушек. Они образуют одну пару полюсов (p), на практике их может быть больше. Обмотки соединяются «треугольником» или «звездой». Запитываются они от трехфазной сети переменного электротока.
Электроток, сдвинутый по фазе на 120 градусов, протекая по размещенным по окружности виткам 3-х катушек, создает вращающееся МП с синхронной частотой:

Вращающееся МП, пересекая набор замкнутых токопроводящих витков подвижной части машины, создает в них ЭДС. Образовавшаяся в замкнутых рамках ротора электродвижущая сила способствует возникновению переменного электротока, воспроизводящего свое вращающееся электромагнитное поле.
Подвижная часть машины начинает вращаться вслед за вращающимся полем со скоростью n2 (об/мин), стремясь засинхронизировать свое электромагнитное поле с вращающимся полем неподвижной части, то есть, достичь скорости n1 (об/мин). Величина разницы скоростей в относительных единицах или процентах называется коэффициентом скольжения (S):

Асинхронная скорость n2 при нормальной эксплуатации электродвигателя всегда меньше синхронной скорости n1, поэтому скольжение асинхронного двигателя меньше единицы и ста процентов.

Зависимость режимов работы мотора от скольжения
Для АД скольжение рассматривается:
- В режиме холостого хода (ХХ);
- при номинальном значении нагрузки;
- генераторном применении;
- критической нагрузке;
- во время пуска.

Асинхронная скорость n2 в режиме ХХ при отсутствии нагрузки на валу практически равна синхронной скорости вращения электромагнитного поля статора n1. Скольжение в этом случае будет не более 3% и даже в режиме идеального ХХ (если пренебречь трением в подшипниках), оно не будет нулевым.
При номинальном напряжении и нагрузке скольжение S находится в диапазоне 2–8% для большинства моторов. Номинальная скорость или скольжение указываются на шильдике асинхронного двигателя. По ним строится график механической характеристики.
В генераторном режиме скольжение может быть отрицательным, то есть, меньше 0. Ротор в этом случае вращается под действием механической силы навстречу вращающемуся электромагнитному полю статора.
С увеличением нагрузки на валу мотора увеличивается момент торможения, вследствие чего увеличивается и скольжение. При этом растет электроток, наводимый в роторе, наряду с моментом вращения. При небольших нагрузках между моментом и скольжением наблюдается прямо пропорциональная зависимость. Но рост скольжения способствует возрастанию активных потерь в роторе, снижающих наводимый электроток. По этой причине момент увеличивается с меньшей скоростью, чем скольжение, а при определенном значении последнего момент становится максимальным и начинает снижаться. Скольжение, соответствующее максимальному моменту, называется критическим.
При пуске мотора асинхронная скорость равняется нулю, скольжение — единице, электроток в двигателе максимальный, а значение момента вращения вала выше значения момента торможения нагрузки. С увеличением скорости вращения МП ротора скольжение уменьшается, а когда скорость достигает своего номинального значения, устанавливается нормальный режим.

Из графика видно, что скольжение мотора меняется от 0 до 1. До того момента, пока не возникнет критическое скольжение, мотор работает устойчиво, а в промежутке от Sкр до 1 возникает неустойчивый режим, который зависит от характера и величины нагрузки на валу. Для управления в этом диапазоне применяют либо переключение «звезда-треугольник», либо фазный ротор, либо частотное регулирование.
Способы измерения
Измерение скольжения в двигателе должно осуществляться согласно требованиям ГОСТ 7217–89 с помощью амперметра постоянного тока, катушки индуктивности или стробоскопического эффекта.
Основная задача — подсчитать количество полных N отклонений стрелки от 0 за период времени T. После того, как нашли данный параметр, можно определить частоту электротока ротора:

Затем по соотношению частоты электротока статора и ротора следует найти скольжение:

Косвенными методами при использовании электромагнитной катушки или стробоскопического эффекта определяют количество оборотов ротора К за период времени Т (сек). Затем вычисляется скольжение. Для этого используется формула:

При больших значениях скольжения для измерения применяются тахогенераторы или тахометры, установленные на валу двигателя.
Видео по теме
Расчетные формулы основных параметров асинхронных двигателей
В таблице 1 представлены расчетные формулы для определения основных параметров асинхронных двигателей.
В данной таблице собраны все формулы, которые касаются расчета параметров асинхронных двигателей.
Используя формулы из данной таблицы, вам больше не придется искать нужную формулу в различных справочниках.
Таблица 1 — Расчетные формулы для определения основных параметров асинхронных двигателей
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Потребляемая активная мощность из сети, кВт |
|
U1, I1 – линейные значения напряжения, В и тока двигателя, А; cosϕ – коэффициент мощности; |
| Потребляемая реактивная мощность, квар |
|
|
| Полезная мощность на валу, кВт |
|
Ƞ — КПД двигателя; |
| Потребляемый двигателем ток, А |
|
|
| Вращающий момент двигателя, кГм |
|
nном. – номинальная скорость вращения ротора, об/мин; |
| Синхронная скорость вращения магнитного поля, об/мин |
|
f1 – частота питающего тока, Гц; р – число пар полюсов машины; |
| Скольжение двигателя |
|
|
| Скорость вращения ротора при нагрузке, об/мин |
|
|
| ЭДС обмоток статора и ротора, В |
|
kоб.1, kоб.2 – обмоточные коэффициенты статора и ротора, равные произведению коэффициентов укорочения kу шага и распределения обмотки kw; kоб. = kу* kw; |
| Коэффициенты трансформации по напряжению и по току |
|
w1, w2 – числа витков обмоток статора и ротора; m1, m2 – числа фаз в обмотках статора и ротора. У двигателей с фазным ротором. m2 = 3 у двигателей с короткозамкнутым ротором; m2 = z2, т.е. числу пазов в роторе. |
| Параметры схемы замещения |
|
zк, rк, хк – полное, активное и индуктивное сопротивления при КЗ двигателя, Ом; Iп – пусковой ток двигателя, А; ∆Рк – суммарные потери в меди статора и ротора двигателя, Вт; r1, x1 – активное и индуктивное сопротивления обмотки статора, Ом; r2’, x2’ – активные и индуктивные сопротивления ротора, приведенные к обмотке статора, Ом; |
| Ток холостого хода, А |
|
Iном. – номинальный ток двигателя, А |
| Критическое скольжение |
|
sinϕ – коэффициент реактивной мощности; kм – коэффициент перегрузочной способности; |
| Уравнение вращающего момента |
|
Sном. – скольжение при номинальной нагрузке |
| Скольжение двигателя s2 при введении добавочного сопротивления в ротор |
|
|
| КПД двигателя при введении добавочного сопротивления в ротор |
|
|
| Критический максимальный момент, развиваемый в двигательном (+) и генераторном (-) режимах, кГм |
|
U1ф – фазное напряжение, В |
| Уравнение вращающего момента при добавочном сопротивлении в цепи ротора |
|
|





Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
активное сопротивление двигателя, полное сопротивление двигателя, реактивное сопротивление двигателя, ток двигателя
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Краткие теоретические сведения. Асинхронные двигатели с короткозамкнутым ротором находят широкое применение в. Критическое скольжение асинхронного двигателя
Критическое скольжение – Большая Энциклопедия Нефти и Газа, статья, страница 1
Критическое скольжение
Cтраница 1
Критическое скольжение в рассматриваемом режиме зависит только от активного сопротивления и индуктивности рассеяния обмотки ротора, а критический электромагнитный момент определяется величиной главного потокосцепления и значением индуктивности рассеяния обмотки ротора. [2]
Критическое скольжение будет изменяться обратно пропорционально частоте, а критический момент – обратно пропорционально квадрату частоты. В обычных условиях эксплуатации частота питающей сети бывает постоянной или меняется в очень малых пределах. Однако на буровых установках нефтяных промыслов при питании электродвигателей от дизель-электрического агрегата двигатель может работать с частотой, отличной от частоты, на которую он рассчитан. Например, так работают электродвигатели, подключаемые к аварийной ДЭС буровой установки при отсутствии напряжения в сети, снабжающей электроэнергией буровую установку. В подобных случаях следует учитывать резкое уменьшение критического момента с увеличением частоты питающего тока, что ограничивает перегрузочную способность двигателя, и принимать необходимые меры. [4]
Критическое скольжение, не зависящее от напряжения, остается неизменным. Не изменяется также и синхронная угловая скорость, которая зависит только от частоты питающего напряжения и числа пар полюсов двигателя. [5]
Критическое скольжение зависит от сопротивления, включенного в ротор. Оно увеличивается пропорционально росту сопротивления. [7]
Критическое скольжение, как нетрудно установить из выражения ( 3 – 51), уменьшается с ростом частоты, а с уменьшением ее растет. При достаточно низких значениях частоты оно от частоты мало зависит. [8]
Критическое скольжение ротора sKp при отсутствии добавочного активного сопротивления в цепи его обмоток может быть найдено из упрощенной формулы Клосса. [9]
Критическое скольжение SKV r ly 2 – j – от напряжения не зависит. [10]
Критическое скольжение асинхронной машины – – скольжение, при котором машина развивает максимальный вращающий момент. [11]
Критическое скольжение асинхронной машины – скольжение, при котором асинхронная машина развивает максимальный вращающий момент. [12]
Критическое скольжение асинхронного двигателя зависит от сопротивления цепи ротора. Поэтому величина относительной продолжительности пуска прямо пропорциональна сопротивлению. [14]
Вблизи критического скольжения апериодический процесс сменяется колебательным. При этом время процесса растет по мере роста абсолютной величины скольжения с соответствующим увеличением числа периодов колебания. [15]
Страницы: 1 2 3 4
www.ngpedia.ru
Краткие теоретические сведения. Асинхронные двигатели с короткозамкнутым ротором находят широкое применение в
Асинхронные двигатели с короткозамкнутым ротором находят широкое применение в приводах различных промышленных механизмов благодаря простоте их конструкции, надежности в эксплуатации, высоким энергетическим показателям и сравнительно низкой стоимости.
Момент электромагнитный, развиваемый асинхронным двигателем определяется выражением:
 , (1)
, (1)
где UФ – действующее значение фазного напряжения сети, В;
R1, R`2 – активные сопротивления обмоток соответственно фазы статора и фазы ротора, приведенное к цепи статора, Ом;
X1, X`2 – индуктивные сопротивления обмоток соответственно фазы статора и фазы ротора, приведенное к цепи статора, Ом;
Xk – индуктивное фазное сопротивление короткого замыкания, Ом;
s – скольжение двигателя;
w0 – угловая скорость поля двигателя, рад/с.
Индуктивное фазное сопротивление короткого замыкания
 . (2)
. (2)
Скольжение двигателя – это относительный параметр, характеризующий отставание или опережение скорости вала двигателя скорости поля по отношению к скорости поля:

. (3)
Угловая скорость поля
 , (4)
, (4)
где f – частота напряжения питающей сети, Гц;
р – число пар полюсов двигателя.
Номинальную угловую скорость двигателя можно определить зная номинальную частоту вращения nНОМ [об/мин] по выражению:
 . (5)
. (5)
Номинальное скольжение двигателя
 . (6)
. (6)
Статическую механическую характеристику АД w = f(М) (здесь М – момент электромагнитный) можно построить используя формулу (1) и уравнение связи между угловой скоростью вала двигателя и скольжением:
 . (7)
. (7)
С учетом того, что момент электромагнитный по формуле (1) имеет экстремум (критическое значение), то возможна и другая форма записи зависимости М = f(s), называемая формулой Клосса:
 , (8)
, (8)
где Мk – максимальное (критическое) значение момента, Н×м;
sk – критическое скольжение, соответствующее Мk;
а – параметр (а = R1/R`2).
Момент критический и скольжение критическое определяются выражениями:
 , (9)
, (9)
 . (10)
. (10)
Для асинхронных двигателей большой мощности (Р2НОМ > 100 кВт) сопротивление R1 невелико, тогда можно считать что R1<<Xk и a×sk<<1. Уравнение механической характеристики в этом случае будет определяться выражениями:
 ,
,  ,
, 
, .
Обычно в каталогах на асинхронные двигатели не приведены параметры схемы замещения (активные и индуктивные сопротивления фаз обмоток), поэтому вышеприведенные формулы имеют ограниченное применение для расчета статических характеристик АД. В каталогах на асинхронные двигатели помимо номинальных данных (Р2НОМ, nНОМ, cosjНОМ, hНОМ и др.) приводится также кратность максимального момента в двигательном режиме по отношению к номинальному моменту mk = Мk/MНОМ. Кратность максимального момента иногда обозначают l = mk. Умножив номинальный момент двигателя на кратность максимального момента нетрудно найти значение критического момента, используемого в формуле (43).
Значение sk в каталогах не приводится, но оно может быть найдено по известным параметрам асинхронного двигателя.
При этом для машин малой мощности, у которых R1 » R`2, можно принять а » 1, тогда:
 , (11)
, (11)
а для машин большой мощности, у которых R1 » 0, можно принять а » 0, тогда:
 . (12)
. (12)
Таким образом, используя формулы (43, 46, 47 и 42) можно рассчитать статическую механическую характеристику асинхронного двигателя w = f(M) по каталожным данным. Для этого необходимо изменяя скольжение в требуемых пределах с определенным шагом вычислять значения момента по (43) и значения скорости по (42). Следует иметь ввиду, что рассчитанная таким образом характеристика будет представлять собой зависимость угловой скорости вала асинхронного двигателя от момента на его валу.
Чтобы определить скорость с которой будет вращаться двигатель при заданном моменте нагрузки на валу в формулу (43) необходимо подставить вместо М заданное значение момента статического МС и решить его относительно скольжения. Следует иметь ввиду, что решение даст два значения скольжения. Необходимо для дальнейших расчетов выбрать нужное значение s (оно должно быть больше нуля но меньше sk). Затем для выбранного значения s по (42) определить угловую скорость двигателя.
Статическую электромеханическую характеристику асинхронного двигателя w = f(I1) можно рассчитать используя приближенную формулу, предложенную В.А. Шубенко – зависимость I1 = f(s) и формулу связи угловой скорости и скольжения двигателя (42). Формула В.А. Шубенко имеет вид:
 , (13)
, (13)
где I1 – ток фазы статора, А;
I1НОМ – номинальный ток фазы статора двигателя, А;
I0 – ток холостого хода двигателя, А;
М, МНОМ – момент двигателя при скольжении s, который определяется при расчете механической характеристики, и номинальный момент двигателя соответственно, Н×м;
s, sНОМ – скольжение двигателя текущее и номинальное соответственно.
Номинальный ток статора и ток холостого хода можно определить по каталожным данным асинхронного двигателя по следующим формулам:
 , (14)
, (14)
 . (15)
. (15)
На рисунке 7 представлен примерный вид статической механической характеристики асинхронного электродвигателя, рассчитанной по формулам (42), (43).

Рисунок 7 – Статическая механическая характеристика АД
На рисунке 8 представлена статическая электромеханическая характеристика асинхронного электродвигателя w = f(I1), рассчитанная по формулам (42), (48), (49), (50).

Рисунок 8 – Статическая электромеханическая характеристика АД
Контрольные вопросы
1. Что показывает статическая механическая характеристика асинхронного двигателя?
2. Что такое естественная механическая характеристика? В чем разница между естественной и искусственной механической характеристикой?
3. Записать выражение естественной механической характеристики асинхронного двигателя и проанализировать его.
4. В чем разница между моментом электромагнитным и моментом на валу двигателя? Как они соотносятся, например, в двигательном режиме работы?
5. Как изменится механическая характеристика асинхронного двигателя, если напряжение, подводимое к статору, уменьшить в два раза? Начертить эти характеристики.
6. В каких квадрантах плоскости {w, М} изображают статические характеристики в тормозных режимах работы (генераторное торможение, торможение противовключением)? Начертить эти характеристики.
7. Пояснить работу универсального лабораторного стенда при работе исследуемого двигателя в двигательном режиме.
8. Пояснить принцип создания регулируемой нагрузки на валу исследуемого двигателя в универсальном лабораторном стенде.
9. Пояснить процессы преобразования энергии в электромашинном агрегате при работе исследуемого двигателя в режиме генераторного торможения.
10. Начертить электромеханическую и механическую характеристики асинхронного двигателя. На характеристиках указать пусковой ток и пусковой момент. Почему кратность пускового тока велика, а пускового момента нет?
11. Что такое критический момент и критическое скольжение? От каких параметров двигателя и питающей сети они зависят?
12. Показать на статической механической характеристике рабочий участок. Почему он так называется?
Рекомендуемая литература
1. Москаленко В.В. Автоматизированный электропривод: Учебник для вузов. – М.: Энергоатомиздат, 1986. – 416 с.: ил.
2. Основы автоматизированного электропривода: Учеб. пособие для вузов/ М.Г. Чиликин, М.М. Соколов, В.М. Терехов, А.В. Шинянский. – М.: Энергия, 1974. – 568с.: ил.
3. Чиликин М.Г. Теория автоматизированного электропривода: Учеб. пособие для вузов / Чиликин М.Г., Ключев В.И., Сандлер А.С. – М.: Энергия, 1979. – 616с.: ил.
megaobuchalka.ru
2.12
Лабораторная работа № 2.12
Определение критического напряжения асинхронного электродвигателя.
Продолжительность работы:4 часа.
Цель работы: Определение критического напряжения асинхронного электродвигателя
Программа изучения переходного процесса:
-
Ознакомиться с теоретической частью.
-
Ознакомиться с конструкцией стенда.
-
Ознакомится с порядком выполнения работы.
-
Собрать схему лабораторной работы согласно указаниям.
-
Провести необходимые испытания.
-
Составить отчет по проделанной работе.
Краткие теоретические сведения:
В промышленности и сельском хозяйстве основными потребителями электроэнергии являются асинхронные двигатели (60-70%), синхронные двигатели составляют 10%, осветительная нагрузка 20-30%.
В связи с этим, представляет интерес исследование статической устойчивости асинхронных двигателей в нормальном режиме работы энергосистемы при малых возмущениях, т.к. если группа асинхронных двигателей имеет мощность, соизмеримую с мощностью источника питания, то в этом случае их режим работы может оказать существенное влияние на устойчивость энергосистемы в целом.
Снижение напряжения в питающей сети влечет за собой увеличение токов статора и ротора асинхронных двигателей (при неизменной нагрузке на валу двигателя), что обуславливает дальнейшее снижение напряжения и возникновение резкого снижения напряжения в сети, т.е. “лавины напряжения”. При рассмотрении статической механической характеристики, у асинхронного двигателя имеется только одна область устойчивой работы – это область, расположенная на восходящей части характеристики P=f(s). Область между критическим скольжением и скольжением, равным 1, является неустойчивой (рис. 1).

Рис. 1. Характеристика асинхронного двигателя при различных значениях питающего напряжения.
В нормальных условиях двигатель работает на устойчивой части своей характеристики при скольжении меньше критического. Однако при снижении напряжения или увеличении механического вращающего момента двигатель может оказаться в критическом режиме (точки b, b1на рис. 1).
При дальнейшем снижении напряжения точка, характеризующая режим, перейдет на спадающую часть характеристики, двигатель будет тормозиться, ток и реактивная мощность будут резко расти, а затем двигатель остановится – “опрокинется” (точки c, c1,на рис. 1).
Статическая устойчивость асинхронных двигателей.
Под статической устойчивостью электрической машины понимается ее способность возвращаться к установившемуся режиму после малых возмущений. Причинами, вызывающими нарушение статической устойчивости, могут быть: значительное увеличение внешнего сопротивления (отключение части питающих линий) или мощности приводного механизма, а также снижение напряжения в узле нагрузки. Обычно запас по статической устойчивости нагрузки оценивается величиной допустимого снижения напряжения в точке питания. [1]
Значения напряжения на зажимах двигателей и независимой от режима работы двигателей э.д.с. источника питания называются критическими, если они соответствуют пределу статической устойчивости (опрокидывающий момент становится равным нагрузке двигателя). Значения UКРиEКРобычно определяются при номинальной частоте.
 (1)
(1)
 (2),
(2),
где  – номинальный коэффициент мощности двигателя,
– номинальный коэффициент мощности двигателя,
КЗ– коэффициент загрузки асинхронного двигателя,
РН- номинальная мощность асинхронного двигателя,
 ,
,
 – внешнее сопротивление двигателя при номинальном скольжении
– внешнее сопротивление двигателя при номинальном скольжении
 (3),
(3),
Где  – кратность максимального момента двигателя,
– кратность максимального момента двигателя,
 и
и – определяются по паспортным данным двигателя. [2]
– определяются по паспортным данным двигателя. [2]
Нарушение статической устойчивости двигателя можно пояснить, рассматривая механические характеристики приводного механизма (кривая 1 на рис. 2) и двигателя, определенные при различных значениях напряжения. Механические характеристики асинхронного двигателя P=f(s)при номинальном и критическом напряжениях представлены кривыми 2 и 3 на рис. 2.
При напряжении U = UНрабочей точкой двигателя является точкаА, скольжение при этом равно номинальному. При напряженииU = UКР наступает критический режим (точкаВ) и двигатель работает со скольжением, равным критическому. При напряженииU < UНпроисходит нарушение устойчивости при скольжении несколько большем, чем критическое (точкаС, кривая 4). Критический режим характеризуется критериями  и
и . [1]
. [1]

Рис. 2. Механические характеристики асинхронного двигателя и приводного механизма.
Данные для выполнения работы:
|
Электрическая схема соединений |
|

Перечень аппаратуры
|
Обозна-чение |
Наименование |
Тип |
Параметры |
|
А1 |
Регулировочный трансформатор |
338 |
250ВА 3х220/3х90…140В |
|
А2 |
Трёхполюсный выключатель |
301.1 |
400 В~;10А |
|
А3 |
Модель линии электропередачи |
313.2 |
400 В; 50 Гц; 3х0,3 А индуктивность/активное сопротивление фазы 0…1,5 Гн/ 0…250 Ом, ёмкость между фазой и землёй 0…0,45 мкф |
|
А4 |
Блок измерительных трансформаторов тока и напряжения |
401.1 |
600 В/ 3 В (тр-р напряж.) 0,3А/ 3 В (тр-р тока) |
|
G1 |
Трёхфазный источник питания |
201.2 |
400 В~; 16 А |
|
G2 |
Источник постоянного напряжения |
214.1 |
0…125 В-; 3 А |
|
G3 |
Преобразователь угловых перемещений |
104 |
6 выходных сигналов |
|
М1 |
Асинхронный двигатель |
103.1 |
120 Вт, 380/220В, 1360 об/мин |
|
Р1 |
Указатель частоты вращения |
506.2 |
-2000…0…2000 мин-1 |
|
Р2 |
Блок мультиметров |
508.2 |
3 мультиметра 0…10 А; 0…1000 В; 0…20 МОм |
Указания по проведению эксперимента
-
Убедитесь, что все устройства, используемые в эксперименте, отключены от сети электропитания.
-
Соедините гнёзда защитного заземления устройств, используемых в эксперименте, с гнездом «PE» источникаG1.
-
Соедините аппаратуру в соответствии с электрической схемой соединений.
-
Переключатели режима работы источника G2, выключателяА2, переведите в положение «РУЧН.»
-
Регулировочную рукоятку источника G2поверните против часовой стрелки до упора.
-
Параметры линии электропередачи А3переключателями установите, например, следующими: R=200 Ом,L/RL=1,2/40 Гн/Ом,С1=С2=0.
-
Включите выключатель «СЕТЬ» блока мультиметров Р2и включите питание используемого мультиметра.
-
Включите источник G1. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся светодиоды.
-
Переключая отпайки регулировочного трансформатора А1,установите междуфазное напряжение 220 В.
-
Включите выключатель «СЕТЬ» указателя Р1.
-
Включите выключатель «СЕТЬ» и нажмите кнопку «ВКЛ» выключателя А2.
-
Обратите внимание на направление вращения агрегата – для проведения эксперимента необходимо левое вращение. Если же оно правое, то необходимо поменять местами любые два фазных провода, идущих к асинхронному двигателю.
-
Включите выключатель «СЕТЬ» и нажмите кнопку «ВКЛ» источника G2. Плавно увеличивайте его выходное напряжение до тех пор, пока частота вращения агрегата не снизится до 1360 об/мин при напряжении питания асинхронного двигателя 220 В. Это – номинальный режим работы двигателя.
-
При помощи трансформатора А1медленно понижайте напряжение питания двигателя до его опрокидывания (останова). Момент начала опрокидывания двигателя и будет происходить при критическом напряжении питания двигателя. Проведите несколько повторных опытов. Полученные данные занесите в таблицу 1.
Таблица 1
|
№ опыта |
1 |
2 |
3 |
4 |
|
UКР, В |
-
По окончании эксперимента уменьшите до нуля выходное напряжение источника G2, отключите его сетевой выключатель, нажмите кнопку “ОТКЛ” выключателяА2, отключите питание блока мультиметров Р2, отключите источникG1нажатием на красную кнопку – “гриб” и последующим отключением ключа-выключателя.
Содержание отчета:
Контрольные вопросы:
-
Дайте понятие критического напряжения асинхронного двигателя.
-
Напишите формулу для определения критического напряжения асинхронного двигателя.
-
Изобразите график зависимости активной мощности асинхронного двигателя от его скольжения.
-
На графике зависимости активной мощности асинхронного двигателя от его скольжения укажите области: а) нормальной работы двигателя
б) потери устойчивости (торможение двигателя)
-
Опишете процессы, происходящие с асинхронным двигателем при снижении питающего напряжения при неизменной нагрузке на валу двигателя.
-
Что подразумевается под понятием «опрокидывание» асинхронного двигателя.
Список литературы:
-
И.П. Чесноков, А.Н. Петрухин. Переходные процессы. Курс лекций. Часть 2. Киров, 2007. 162 стр.
-
Бугров В.Г. Электромеханические переходные процессы в системах электроснабжения: Учеб. пособие. – Тверь: ТГТУ, Т.: Изд-во ТГТУ, 2005. – 115 с.
studfiles.net
Скольжение асинхронного двигателя — википедия фото
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
s=(n1−n)/n1{displaystyle s=(n_{1}-n)/n_{1}},
где n{displaystyle n} — скорость вращения ротора асинхронного двигателя, об/мин
n1{displaystyle n_{1}} — скорость циклического изменения магнитного потока статора, называется синхронной скоростью двигателя.
n1=60×f/p{displaystyle n_{1}=60times f/p},
где f — частота сети переменного тока, Гц
p — число пар полюсов обмотки статора (число пар катушек на фазу).
Из последней формулы видно, что скорость вращения двигателя n практически определяется значением его синхронной скорости, а последняя при стандартной частоте 50 Гц зависит от числа пар полюсов: при одной паре полюсов — 3000 об/мин, при двух парах — 1500 об/мин, при трёх парах — 1000 об/мин и т. д.
Режим холостого хода
Холостой ход асинхронного двигателя имеет место в том случае, если на валу отсутствует нагрузка в виде рабочего органа или редуктора. При сборке нового двигателя всегда проводится испытания холостого хода, для того чтобы определить потери в подшипниках, вентиляторе и магнитопроводе, а также узнать значения намагничивающего тока. Во время холостого хода скольжение составляет: S=0,01÷0,08.
Следует заметить, что так же существует режим идеального холостого хода, при котором n2=n1, что практически реализовать невозможно, даже если учесть, что нет силы трения в подшипниках. На самом деле суть заключается в том, что асинхронному двигателю необходимо, чтобы ротор отставал от магнитного вращающегося поля статора. При отставании поле статора индуцирует магнитное поле в ротор, что заставляет его вращаться за полем статора.
Критическое скольжение
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Литература
- Хомяков Н. М., Денисов В. В., Панов В. А. Электротехника и электрооборудование судов. — Ленинград: Издательство «Судостроение», 1971. — 368 с.
org-wikipediya.ru
Критическое скольжение – Большая Энциклопедия Нефти и Газа, статья, страница 2
Критическое скольжение
Cтраница 2
Определить критическое скольжение, число оборотов при максимальном моменте, номинальный и максимальный вращающие моменты. [16]
Величина критического скольжения делит механическую характеристику электродвигателя на две части: неустойчивую и устойчивую. [18]
Значение критического скольжения не изменится, так как оно не зависит от напряжения. На рис. 10.21, г изображены механические характеристики двигателя, соответствующие схеме включения треугольником и пусковой схеме звездой. [19]
Величина критического скольжения делит механическую характеристику электродвигателя на две части: неустойчивую и устойчивую. [21]
Величина критического скольжения может быть определена на основании следующих рассуждений. [22]
Значение критического скольжения не изменится, так как оно не зависит от напряжения. На рис. 10.21, г изображены механические характеристики двигателя, соответствующие схеме включения треугольником и пусковой схеме звездой. [23]
Величина критического скольжения не изменится, так как она не зависит от напряжения. На рис. 10.21, г изображены механические характеристики двигателя, соответствующие схеме включения треугольником и пусковой схеме звездой. [25]
Значение критического скольжения SK, при котором двигатель развивает максимальный ( критический) момент Мк, легко определить, если взять производную dM / ds выражения (10.51) и приравнять ее нулю. [26]
Под критическим скольжением синхронного двигателя покушается максимальное скольжение, при котором после подачи возбуждения обеспечивается вхождение его в синхронизм. [27]
Под критическим скольжением синхронного двигателя понимается максимальное скольжение, при котором после подачи возбуждения обеспечивается вхождение его в синхронизм. [29]
При малых критических скольжениях работа механизма с муфтой скольжения может оказаться неустойчивой. [30]
Страницы: 1 2 3 4
www.ngpedia.ru
Статические характеристики асинхронного двигателя. Понятие критического скольжения, момента, мощности. «Опрокидывание» асинхронного двигателя.
Асинхронные машины относятся к классу электромеханических преобразователей, т.е. преобразователей электрической энергии в механическую или механической в электрическую. В первом случае они называются двигателями, а во втором – генераторами. Все электрические машины обладают свойством обратимости и могут осуществлять преобразование энергии в обоих направлениях, поэтому при изучении процессов в машинах пользуются понятиями двигательного и генераторного режимов. Однако при разработке и изготовлении машины оптимизируются для условий работы в одном из режимов и используются в соответствии с назначением. Асинхронные машины не являются исключением из этого правила, но асинхронные генераторы значительно уступают синхронным по многим параметрам и редко используются на практике, в то время как асинхронные двигатели являются самыми распространёнными электромеханическими преобразователями. Суммарная мощность асинхронных двигателей составляет более 90% общей мощности всех существующих двигателей, поэтому в данном курсе мы ограничимся рассмотрением только этого типа машин.
Асинхронные двигатели относятся к бесколлекторным машинам переменного тока или машинам с вращающимся магнитным полем. Название асинхронные (несинхронные) объясняется тем, что в статическом режиме работы скорость вращения ротора (вращающейся части) двигателя отличается от скорости вращения магнитного поля, т.е. ротор и поле вращаются несинхронно.
Причиной широкого распространения асинхронных двигателей является их предельная простота, надёжность и экономичность. Конструкция асинхронных двигателей не претерпела существенных изменений с 1889 года, когда эти двигатели были изобретены М.О. Доливо-Добровольским. Можно сказать, что асинхронные двигатели совместно с синхронными генераторами и трёхфазными линиями передачи и распределения электрической энергии образуют систему передачи механической энергии на расстояние.
В последнее время в связи с появлением полупроводниковых преобразователей частоты для питания асинхронных двигателей область их применения существенно расширилась. Они стали широко применяться в высокоточных приборных приводах там, где ранее использовались в основном двигатели постоянного тока.
При анализе процессов в асинхронном двигателе и в справочных данных используют понятие скольжения  как разности между скоростями вращения магнитного поля (
как разности между скоростями вращения магнитного поля (  ) и ротора (
) и ротора (  ), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) – нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
), отнесённой к скорости вращения поля. При известной частоте сети и числе пар полюсов по скольжению можно определить скорость вращения. Например, скорость вращения двигателя с двумя парами полюсов при питании от промышленной сети (n = 60*50/2 = 1500 об/мин) и скольжении 0,05 составляет 1425 об/мин. Скольжение при неподвижном роторе (n = 0) равно единице, а при синхронном вращении (n =n1) – нулю. Скорость или частота вращения магнитного поля называется также синхронной скоростью (частотой), т.к. ротор при этой скорости вращается синхронно с полем. Синхронный режим работы асинхронного двигателя называется идеальным холостым ходом. Он возможен только в том случае, если ротор приводится во вращение другим двигателем или механизмом, присоединённым к валу.
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
 где См – конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
где См – конструктивная постоянная; j2s- фазовый сдвиг между током и магнитным потоком. Отношение максимального момента Мmax к номинальному Мн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
 Потери в асинхронном двигателе
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе – из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому – sп.
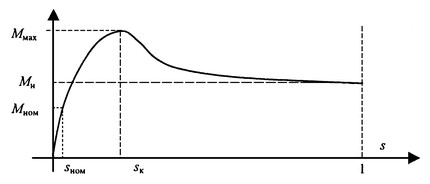 Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке. На участке от 0 до Мmax двигатель работает в устойчивом режиме, а участок от Skназывается режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Мп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
infopedia.su
Критический момент – двигатель – Большая Энциклопедия Нефти и Газа, статья, страница 2
Критический момент – двигатель
Cтраница 2
Это допущение справедливо при условии, что максимальное значение пускового момента на 15 – 20 % меньше критического момента двигателя. [16]
При увеличении скорости скольжение уменьшается и развиваемый двигателем момент возрастает до максимального значения, которое называется опрокидывающим или критическим моментом двигателя тм. [17]
Существенно отметить, что при введении дополнительного активного сопротивления в роторную цепь скорость двигателя изменяется в относительно широких пределах, а критический момент двигателя при регулировании остается постоянным. Следовательно, перегрузочная способность двигателя при этом не уменьшается. [18]
При увеличении скорости вращения скольжение двигателя уменьшается, момент возрастает и в точке Ь достигает максимального значения, которое называется опрокидывающим или критическим моментом двигателя. [20]
Динамические моменты в асинхронных двигателях, связанные с электромагнитными переходными процессами, сопровождающими режимы пуска и торможения, могут достигать больших значений, в несколько раз превышающих критические моменты двигателя, рассчитанные по статическим характеристикам. [21]
С увеличением а уменьшается критический момент двигателя и вместе с тем снижатеся модуль механических характеристик. [23]
Асинхронный двигатель весьма чувствителен к колебаниям напряжения сети. Как следует из уравнения (III.10), критический момент двигателя ( а также и пусковой) пропорционален квадрату напряжения питания. [24]
В том Случае, когда обмотка статора асинхронного двигателя выполняется таким образом, что при напряжении 380 в и полной нагрузке она должна быть соединена в треугольник, целесообразным является переключение на звезду при малых нагрузках, что приводит к снижению потребляемой реактивной мощности. Не следует забывать при этом, что критический момент двигателя снизится в 3 раза, так как напряжение, подведенное к обмотке фазы статора, снизится в / з раз. Указанное переключение применяется на ряде эскалаторов. Кроме повышения коэффициента мощности, оно обеспечивает также снижение момента двигателя при включении эскалатора на спуск пассажиров, что ограничивает величину ускорений всей системы электропривода. [25]
В том случае, когда обмотка статора асинхронного двигателя выполняется таким образом, что при напряжении 380 в и полной нагрузке она должна быть соединена в треугольник, целесообразным является переключение на звезду при малых нагрузках, что приводит к снижению потребляемой реактивной мощности. Не следует забывать при этом, что критический момент двигателя снизится в 3 раза, так как напряжение, подведенное к обмотке фазы статора, снизится в V 3 раз. Указанное переключение применяется на ряде эскалаторов. [26]
На рис. 11 представлены механические характеристики асинхронного двигателя, построенные для различных значений дополнительных активных сопротивлений ста-торной цепи. Из них видно, что с увеличением сопротивления критический момент двигателя уменьшается. [28]
При to – wc3 динамические моменты, возникающие при любом малом отклонении скорости, направлены на уменьшение возникшего отклонения скорости и возвращают электропривод в точку устойчивого равновесия. Увеличение момента нагрузки вплоть до значения, соответствующего критическому моменту двигателя, приводит к слиянию точек устойчивого и неустойчивого равновесия в одну точку со сок со ( 1 – SK), для которой устойчивость зависит от направления отклонения. [29]
Из формул ( 5) и ( 6) следует, что при неизменном скольжении ток ротора двигателя пропорционален напряжению, приложенному к статору, а момент двигателя пропорционален квадрату этого напряжения. Так как величина Критического скольжения не зависит от напряжения, критический момент двигателя пропорционален квадрату напряжения. [30]
Страницы: 1 2 3
www.ngpedia.ru
Смотрите также
-

Двигатель асинхронный переменного тока
-

Как проверить двигатель асинхронный
-

Как проверить асинхронный двигатель
-
Подключение асинхронного однофазного двигателя
-

Частота вращения асинхронного двигателя
-

Инвертор асинхронного двигателя схема
-

Перегрузочная способность асинхронного двигателя
-

Регулирование скорости асинхронного двигателя
-

Двигатель постоянного тока асинхронный
-

Асинхронный двигатель постоянного тока
-

Тяговый асинхронный двигатель троллейбуса
