Светлой
памяти
Чубича
Михаила Петровича
посвящается
§ 7.1. Определение линейного оператора.
Матрица линейного оператора
Пусть
![]()
и ![]()
– линейные пространства над одним и тем
же полем ![]() .
.
Будем говорить, что из
пространства
![]()
в пространство
![]()
действует оператор
![]()
или, что то же самое, отображение
![]() ,
,
преобразование
![]() ,
,
если каждому вектору ![]()
по какому – либо правилу поставлен в
соответствии определенный вектор ![]()
из ![]() .
.
Наиболее
простыми являются линейные операторы.
Отображение ![]()
называется линейным
оператором
(линейным
преобразованием),
действующим из ![]()
в ![]() ,
,
если оно удовлетворяет следующим двум
условиям:
![]()
![]() ;
;
![]()
![]() ,
,
![]() .
.
Совокупность
условий 1 и 2 равносильна следующему
условию:
![]() .
.
(7.1.1)
Обозначим
через ![]()
множество всех линейных операторов,
действующих из линейного пространства
![]()
в линейное пространство ![]() .
.
Два линейных оператора ![]()
и ![]()
из ![]()
называются равными,
если
![]() .
.
(7.1.2)
Множество![]()
будет линейным пространством над полем
![]() ,
,
если определить сумму
![]()
операторов
![]()
и произведение
![]()
оператора
![]()
на число
![]()
соотношениями
![]()
![]() (7.1.3)
(7.1.3)
![]()
![]() (7.1.4)
(7.1.4)
Нулевым
вектором пространства ![]()
будет нулевой
оператор
![]() из
из
![]() в
в![]() ,
,
т.е. оператор, переводящий любой вектор
![]()
линейного пространства ![]()
в нулевой вектор линейного пространства
![]() .
.
В
случае, когда ![]() ,
,
линейный оператор
![]()
называется линейным преобразованием
пространства ![]() .
.
Пусть
![]() –
–
оператор из ![]() ,
,
и пусть ![]() и
и
![]() –
–
фиксированные базисы линейных пространств
![]() и
и![]() соответственно.
соответственно.
Разложим векторы ![]()
по базису ![]() :
:
![]() ,
,
![]() ,
,
(7.1.5)
![]()
![]() .
.
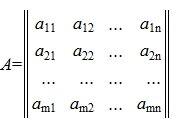
Из
коэффициентов этих разложений составим
![]() –
–
матрицу
 .
.
(7.1.6)
Матрица
![]()
называется матрицей
линейного оператора
![]()
в паре базисов ![]() и
и
![]() .
.
Заметим, что столбцами матрицы ![]()
служат столбцы координат векторов ![]()
в базисе ![]() ,
,
т.е. строки коэффициентов из разложений
(7.1.5).
Если
![]() ,
,
то при нахождении матрицы линейного
оператора фиксируются векторы одного
базиса ![]() ,
,
по которому раскладываются ![]() .
.
Записанные столбцами коэффициенты
разложений образуют квадратную матрицу
![]()
порядка ![]() .
.
Равные
линейные операторы в одном и том же
базисе имеют одинаковые матрицы.
Матрицей
суммы линейных операторов в фиксированных
базисах является сумма матриц слагаемых
операторов в тех же базисах.
При
умножении линейного оператора на число
его матрица умножается на то же число.
Если
![]() и
и
![]() –
–
соответственно,
![]() –
–
и
![]() –
–
мерное линейные пространства над одним
полем
![]() ,
,
то линейное пространство
![]()
изоморфно
линейному пространству
![]() –
–
матриц с элементами из
![]() с
с
операциями сложения матриц и умножения
их на числа из поля
![]() .
.
Пример
1.
Оператор ![]()
называется
тождественным
(единичным)
оператором,
если
![]() .
.
(7.1.7)
Покажите
линейность оператора ![]()
и постройте его матрицу в базисе ![]() .
.
Решение.
В силу того, что ![]()
![]() ,
,
убеждаемся
в линейности тождественного оператора.
Поскольку
получаем,
что
 .
.
В
любом базисе тождественный оператор
имеет единичную матрицу.
Пример
2.
Докажите, что преобразование

пространства
![]()
линейно и найдите его матрицу в
каноническом базисе.
Решение.
Пусть
 и
и
– произвольные векторы из ![]() .
.
Тогда ![]()

т.
е. преобразование ![]()
пространства ![]()
линейно. Канонический базис линейного
пространства ![]()
составляют векторы ![]()
![]() .
.
Из определения оператора ![]()
вытекает, что
Таким
образом,
Пример
3.
Покажите, что умножение квадратных
матриц второго порядка слева на данную
матрицу ![]()
является линейным преобразованием
пространства ![]()
и найдите матрицу этого преобразования
в базисе, состоящем из матриц
![]()
Решение.
По определению преобразования ![]()
для любых матриц ![]()
и любых чисел ![]()
имеем:
![]() .
.
Перейдем
к построению матрицы оператора ![]()
в данном базисе. В силу того, что

получаем:
 .
.
7.1.1.
Какую матрицу имеет нулевой оператор
в любых базисах пространств ![]()
и ![]() ?
?
7.1.2.
Линейное пространство ![]()
является прямой суммой подпространств
![]()
и ![]() .
.
Докажите, что оператор ![]()
пространства ![]() ,
,
который каждому вектору ![]()
с разложением ![]() ,
,
где ![]() ,
,
ставит в соответствие вектор ![]()
этого разложения, является линейным.
Оператор ![]()
называется оператором
проектирования
пространства ![]()
на ![]()
параллельно ![]() .
.
Найдите
матрицу этого оператора в базисе,
полученном объединением базисов
подпространств ![]()
и ![]() .
.
7.1.3.
Линейное пространство ![]()
является прямой суммой подпространств
![]()
и ![]() .
.
Докажите, что оператор ![]() ,
,
который каждому вектору ![]()
с разложением ![]() ,
,
где ![]() ,
,
ставит в соответствие вектор ![]() ,
,
является линейным. Оператор ![]()
называется отражением
пространства ![]()
в ![]()
параллельно ![]() .
.
Найдите
матрицу этого оператора в базисе,
полученном объединением базисов
подпространств ![]()
и ![]() .
.
7.1.4.
Докажите, что всякий линейный оператор,
действующий в одномерном пространстве,
сводится к умножению всех векторов
пространства на фиксированное (для
данного оператора) число.
7.1.5.
Верно ли, что линейный оператор переводит:
а)
линейно зависимую систему векторов в
линейно зависимую;
б)
линейно независимую систему векторов
в линейно независимую?
7.1.6.
Выясните, какие из следующих преобразований
пространства ![]()
линейны, и в случае линейности найдите
их матрицы в каноническом базисе:
а)

б)
в)

г)
7.1.7.
Укажите, какие из приведенных преобразований
пространства ![]()
являются линейными операторами, и
найдите их матрицы в базисе ![]() .
.
Каждое преобразование описывается
своим действием на произвольный многочлен
![]() :
:
а)
![]()
б) ![]()
в)
![]() ,
,
где ![]()
и ![]()
– фиксированные числа, причем ![]() ;
;
г)
![]()
Этот оператор в дальнейшем называется
оператором
дифференцирования.
7.1.8.
Какова матрица оператора дифференцирования,
действующего в линейном пространстве
![]() ,
,
в базисе ![]() ,
,
где ![]()
– действительное число?
7.1.9.
Покажите, что умножение квадратных
матриц второго порядка справа на данную
матрицу ![]()
является линейным преобразованием
пространства ![]() ,
,
и найдите матрицу этого преобразования
в базисе, состоящем из матриц :
![]()
7.1.10.
Проверьте линейность оператора ![]() ,
,
заданного формулой ![]() ,
,
где 
и постройте матрицу этого оператора в
базисах
![]()
![]() и
и
![]()
7.1.11.
В пространстве ![]()
фиксирован базис, состоящий из матриц
![]()
(в
указанном порядке). Запишите в этом
базисе матрицу оператора транспонирования,
т.е. оператора, который каждой матрице
![]()
ставит в соответствие транспонированную
матрицу.
Как
изменится эта матрица, если в базисе
поменять местами векторы ![]()
и ![]() ?
?
Соседние файлы в папке Задачник-2
- #
- #
- #
- #
- #
- #
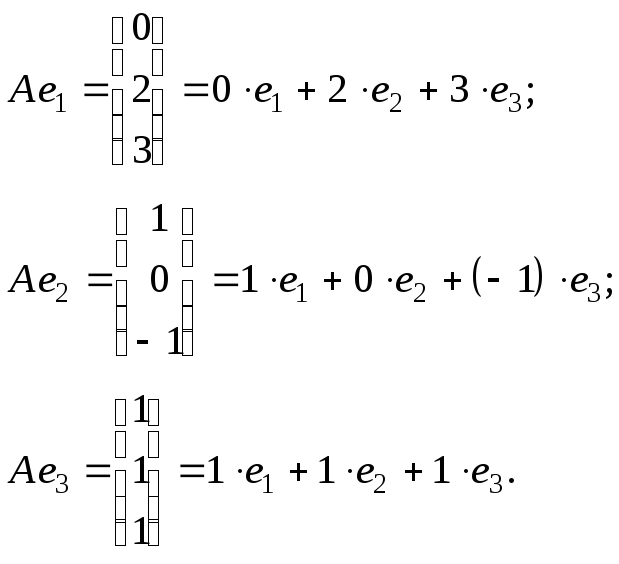
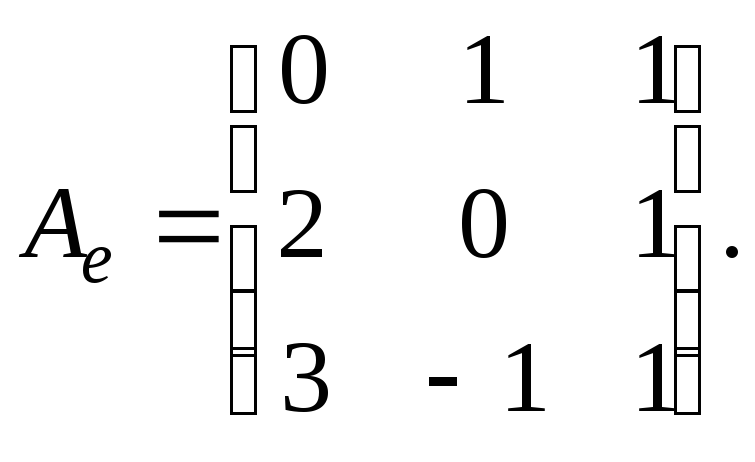
Задание 1. Линейный оператор ![]() преобразует векторы
преобразует векторы ![]() ,
, ![]() ,
, ![]() в векторы
в векторы ![]() ,
, ![]() ,
, ![]() . Найти матрицу
. Найти матрицу ![]() линейного оператора.
линейного оператора.
Решение. Матрицы
 ,
,  и
и ![]()
Связаны между собой соотношением ![]() , откуда
, откуда ![]() .
.
Так как ![]() , то
, то  , а искомая матрица линейного оператора
, а искомая матрица линейного оператора  .
.
Ответ: .
Задание 2. Пусть линейный оператор ![]() в базисе
в базисе ![]() задан матрицей
задан матрицей  . Найти матрицу
. Найти матрицу ![]() этого линейного оператора в базисе
этого линейного оператора в базисе ![]() , если матрица
, если матрица  является матрицей перехода от базиса
является матрицей перехода от базиса ![]() к базису
к базису ![]() .
.
Решение. Матрицы ![]() и
и ![]() линейного оператора
линейного оператора ![]() , заданного в разных базисах, связаны между собой соотношением
, заданного в разных базисах, связаны между собой соотношением ![]() . Так как
. Так как  , то
, то
 .
.
Ответ:  .
.
Задание 3. Линейный оператор ![]() в базисе
в базисе ![]() задан матрицей
задан матрицей  . Найти матрицу
. Найти матрицу ![]() этого линейного оператора в базисе
этого линейного оператора в базисе ![]() , если
, если ![]() ,
, ![]() .
.
Решение. Связь между матрицами ![]() и
и ![]() линейного оператора в разных базисах определяется формулой
линейного оператора в разных базисах определяется формулой ![]() , где
, где ![]() – матрица перехода от базиса
– матрица перехода от базиса ![]() к базису
к базису ![]() .
.
Составим матрицу ![]() :
:  , тогда
, тогда  и, следовательно,
и, следовательно,
 .
.
Ответ:  .
.
Задание 4. Линейный оператор ![]() в базисе
в базисе ![]() задан матрицей
задан матрицей  . Найти матрицу
. Найти матрицу ![]() этого линейного оператора в базисе
этого линейного оператора в базисе ![]() , если
, если ![]()
![]() ,
, ![]() .
.
Решение. Матрицы ![]() и
и ![]() связаны между собой соотношением
связаны между собой соотношением ![]() , где
, где ![]() – матрица перехода от базиса
– матрица перехода от базиса ![]() к базису
к базису ![]() .
.
Составим матрицу ![]() :
:  , тогда
, тогда  и, следовательно,
и, следовательно,

Ответ:  .
.
Задание 5. Найти собственные значения и собственные векторы линейного оператора ![]() , заданного в некотором базисе матрицей
, заданного в некотором базисе матрицей  .
.
Решение. Для нахождения собственных значений линейного оператора составим характеристическое уравнение ![]() , т. е.
, т. е.  . Раскрывая определитель, получим
. Раскрывая определитель, получим ![]() , т. е.
, т. е. ![]() ,
, ![]() .
.
По определению ![]() называется собственным вектором линейного оператора
называется собственным вектором линейного оператора ![]() , соответствующим собственному значению
, соответствующим собственному значению ![]() , если
, если ![]() .
.
Найдём собственные векторы ![]() и
и ![]() , соответствующие собственным значениям
, соответствующие собственным значениям ![]() и
и ![]() .
.
При ![]() получим:
получим:  , что равносильно такой однородной системе уравнений:
, что равносильно такой однородной системе уравнений: 
Если ![]() – базисная переменная, а
– базисная переменная, а ![]() – свободная, то
– свободная, то  .
.
При ![]() :
:  , что равносильно однородной системе уравнений
, что равносильно однородной системе уравнений 
Пусть ![]() – базисная переменная,
– базисная переменная, ![]() – свободная. Примем
– свободная. Примем ![]() , тогда
, тогда ![]() , а следовательно,
, а следовательно,  .
.
Так как собственные векторы соответствуют различным собственным значениям, то они должны быть линейно независимы. Проверим линейную независимость полученных собственных векторов и  .
.
Составим матрицу  . Так как
. Так как ![]() , то собственные векторы
, то собственные векторы ![]() и
и ![]() линейно независимы.
линейно независимы.
Ответ: собственные числа ![]() ,
, ![]() ; собственные векторы
; собственные векторы  , .
, .
Задание 6. Привести матрицу  линейного оператора
линейного оператора ![]() к диагональному виду.
к диагональному виду.
Решение. Матрица линейного оператора будет диагональной в базисе из собственных векторов, если такой базис существует. Найдём собственные значения и собственные векторы линейного оператора.
Запишем характеристическое уравнение:  , т. е.
, т. е. ![]() или
или ![]() , откуда получаем
, откуда получаем ![]() ,
, ![]() .
.
Найдём собственные векторы ![]() И
И ![]() .
.
При ![]() получим:
получим:  , что соответствует следующей однородной системе уравнений:
, что соответствует следующей однородной системе уравнений: 
Пусть ![]() – базисная переменная,
– базисная переменная, ![]() – свободная. Полагая
– свободная. Полагая ![]() , получим
, получим  .
.
При ![]() :
:  . Соответствующая однородная система уравнений имеет вид:
. Соответствующая однородная система уравнений имеет вид:
Откуда ![]() . Пусть
. Пусть ![]() – базисная переменная,
– базисная переменная, ![]() – свободная, примем
– свободная, примем ![]() тогда
тогда ![]() , а, следовательно,
, а, следовательно,  .
.
Собственные векторы ![]() и
и ![]() отвечают различным собственным значениям, поэтому они линейно независимы, т. е. могут составить базис. Матрица
отвечают различным собственным значениям, поэтому они линейно независимы, т. е. могут составить базис. Матрица ![]() линейного оператора в базисе из собственных векторов
линейного оператора в базисе из собственных векторов ![]() и
и ![]() имеет диагональный вид:
имеет диагональный вид:  .
.
Можно проверить полученный результат. Так как ![]() , где матрица
, где матрица ![]() в случае перехода к базису из собственных векторов и имеет вид
в случае перехода к базису из собственных векторов и имеет вид  , следовательно,
, следовательно,
 ,
,
Тогда
 .
.
Ответ: .
Задание 7. Найти собственные значения и собственные векторы линейного оператора ![]() , заданного в некотором базисе матрицей
, заданного в некотором базисе матрицей  . Построить, если это возможно, базис из собственных векторов и найти матрицу
. Построить, если это возможно, базис из собственных векторов и найти матрицу ![]() этого линейного оператора в базисе из собственных векторов.
этого линейного оператора в базисе из собственных векторов.
Решение. Запишем характеристическое уравнение:
 ,
,
Т. е. ![]() ,
, ![]()
![]() , откуда получаем
, откуда получаем ![]() ,
, ![]() ,
, ![]() .
.
Найдём собственные векторы линейного оператора.
При ![]() :
:  , тогда соответствующая однородная система уравнений примет вид:
, тогда соответствующая однородная система уравнений примет вид:
 или
или 
Что равносильно такой системе: 
Пусть ![]() и
и ![]() – базисные переменные,
– базисные переменные, ![]() – свободная. Полагая
– свободная. Полагая ![]() , получим
, получим  .
.
При ![]() :
:  , или, переходя к однородной системе уравнений, получим
, или, переходя к однородной системе уравнений, получим

Пусть ![]() и
и ![]() – базисные переменные,
– базисные переменные, ![]() – свободная. Если
– свободная. Если ![]() , то
, то  .
.
При ![]() получим:
получим:  , и однородная система уравнений примет вид:
, и однородная система уравнений примет вид:
Пусть ![]() и
и ![]() – базисные переменные,
– базисные переменные, ![]() – свободная. Тогда если
– свободная. Тогда если ![]() , то
, то  . Найденные собственные векторы соответствуют различным собственным значениям, поэтому они линейно независимы, значит, существует базис из собственных векторов. Матрица перехода к такому базису
. Найденные собственные векторы соответствуют различным собственным значениям, поэтому они линейно независимы, значит, существует базис из собственных векторов. Матрица перехода к такому базису  , тогда
, тогда
 .
.
Матрица ![]() линейного оператора
линейного оператора ![]() в базисе из собственных векторов имеет вид:
в базисе из собственных векторов имеет вид:  .
.
Можно сделать проверку полученных результатов:

 .
.
Ответ: ![]() ,
, ![]() ,
, ![]() ; , , ; матрица линейного оператора в базисе из собственных векторов .
; , , ; матрица линейного оператора в базисе из собственных векторов .
| < Предыдущая | Следующая > |
|---|
Линейные операторы
1. Понятие линейного оператора
Пусть R и S линейные пространства, которые имеют размерность n и m соответственно. Оператором A действующим из R в S называется отображение вида  , сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y=A(x) или y=Ax.
, сопоставляющее каждому элементу x пространства R некоторый элемент y пространства S. Для этого отображения будем использовать обозначение y=A(x) или y=Ax.
Определение 1. Оператор A действующий из R в S называется линейным, если для любых элементов x1 и x2 пространства R и любого λ из числового поля K выполняются соотношения
- A(x1+x2)=Ax1+Ax2.
- A(λx)=λAx.
Если пространство S совпадает с пространством R, то линейный оператор, который действует из R в R называют линейным преобразованием пространства R.
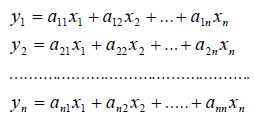
Пусть заданы два векторных пространства n-мерный R и m-мерный S, и пусть в этих пространствах заданы базисы  и
и  соответственно. Пусть задано отображение
соответственно. Пусть задано отображение
где A – m×n -матрица с коэффициентами из поля K. Тогда каждому элементу из R соответствует элемент y=Ax из S. Отображение (1) определяет оператор A. Покажем, что этот оператор обладает свойством линейности. Действительно, учитывая свойства умножения матриц, можно записать:
Покажем теперь обратное, т.е. что для любого линейного оператора A, отображающего пространство R в S и произвольных базисов и в R и S соответственно, существует такая матрица A с элементами из численного поля K, что определяемое этой матрицей линейное отображение (1) выражает координаты отображенного вектора y через координаты исходного вектора x.
Пусть x − произвольный элемент в R. Тогда
 |
(3) |
является разложением x в по базису .
Применим оператор A к базисным векторам :
 |
(4) |
где aij − координаты полученного вектора в базисе .
Тогда применяя оператор A к элементу x и учитывая (3) и (4), имеем
|
|
(5) |
Сделаем следующее обозначение:
 |
(6) |
Тогда равенство (5) примет следующий вид:
 |
(7) |
Из равенства (7) следует, что любой элемент из пространства R при отображении оператором A, в пространстве S и в базисе имеет координаты yi, i=1,2,…,m. В свою очередь, из (6) следует, что этим координатам соответствуют линейные комбинации координатов элемента xj, j=1,2,…n с коэффициентами aij i=1,2,…,m; j=1,2,…,n.
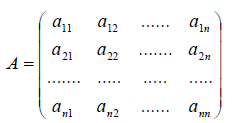
Построим матрицу A с элементами aij:
 |
(8) |
Тогда выражение (6) можно записать в матричном виде:
Матрица A называется матрицей линейного оператора в заданных базисах и .
2. Сложение линейных операторов
Пусть A и B два линейных оператора действующих из R в S и пусть A и B – mxn − матрицы соответствующие этим операторам.
Определение 2. Суммой линейных операторов A и B называется оператор C, определяемый равенством
где x∈R означает, что x принадлежит пространстве R.
Сумма линейных операторов обозначается так C=A+B. Легко убедится, что сумма линейных операторов также является линейным оператором.
Применим оператор C к базисному вектору ej, тогда:
| Cej=Aej+Bej= | n | (aij+bij)ej |
| ∑ | ||
| j=1 |
Следовательно оператору C отвечает матрица  ,где i=1,2,…m, j=1,2,…n, т.е.
,где i=1,2,…m, j=1,2,…n, т.е.
3. Умножение линейных операторов
Пусть заданы три линейных пространства R, S и T. Пусть линейный оператор B отображает R в S, а линейный оператор A отображает S в T.
Определение 3. Произведением операторов A и B называется оператор C, для которого выполняется следующее равенство при любом x из R:
Произведение линейных операторов обозначается C=AB. Легко убедится, что произведение линейных операторов также является линейным оператором.
Таким образом оператор C отображает пространство R в T. Выберем в пространствах R, S и T базисы и обозначим через A, B и C матрицы операторов A, B и C соответствующие этим базисам. Тогда отображения линейных операторов A, B, C
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению операторов C=AB соответствует матричное произведение C=AB.
4. Умножение линейного оператора на число
Пусть задан линейный оператор A отображающий R в S и некоторое число λ из поля K.
Определение 4. Произведением оператора A на число λ называется оператор C, для которого выполняется следующее равенство при любом x из R:
Таким образом оператор C отображает пространство R в S. Выберем в пространствах R и S базисы и обозначим через A матрицу оператора A соответствующее этим базисам векторные равенства
можно записать в виде матричных равенств
где x, y, z − векторы x, y, z − представленные в виде координатных столбцов. Тогда
Учитывая произвольность х, получим
Следовательно произведению оператора C на число λ соответствует произведение матрицы A на число λ.
5. Нулевой оператор
Оператор, отображающий все элементы пространства R в нулевой элемент пространства S называется нулевым оператором и обозначается через O. Действие нулевого оператора можно записать так:
6. Противоположный оператор
Противоположным оператору A называется оператор −A удовлетворяющий равенству:
7. Ядро линейного оператора
Определение 5. Ядром линейного оператора A называется множество всех тех элементов x пространства R, для которых выполняется следующее равенство: Ax=0.
Ядро линейного оператора также называют дефектом оператора. Ядро линейного оператора обозначается символом ker A.
8. Образ линейного оператора
Определение 6. Образом линейного оператора A называется множество всех элементов y пространства R, для которых выполняется следующее равенство: y=Ax для всех x из R.
Образ линейного оператора обозначается символом im A.
9. Ранг линейного оператора
Определение 7. Рангом линейного оператора A обозначаемое символом rang A называется число равное размерности образа im A оператора A, т.е.: rang A=dim(im A).
Линейные операторы (преобразования)
Определение линейных операторов (преобразований)
Линейным преобразованием (линейным оператором) линейного пространства называется линейное отображение
пространства
в себя.
Поскольку линейное преобразование является частным случаем линейного отображения, к нему применимы все понятия и свойства, рассмотренные для отображений: инъективность, сюръективность, биективность, обратимость, ядро, образ, дефект, ранг и т.д.
Матрицей линейного оператора (преобразования) в базисе
пространства
называется квадратная матрица
, составленная из координатных столбцов образов базисных векторов
, найденных относительно базиса
.
Матрица биективного линейного оператора (преобразования) обратима, т.е. невырождена. Поэтому биективное (обратимое) преобразование называют также невырожденным.
Примеры линейных операторов (преобразований)
1. Обозначим — нулевое преобразование n-мерного пространства
, которое ставит в соответствие любому вектору
нулевой элемент
пространства
. Это преобразование не является инъективным, сюръективным, биективным, обратимым. Матрица нулевого преобразования (в любом базисе) нулевая, ядро преобразования
, образ преобразования
, дефект
, ранг
.
2. Обозначим — тождественное преобразование n-мерного пространства
, которое ставит в соответствие каждому вектору
этот же вектор
. Это преобразование является инъективным, сюръективным, биективным, обратимым. Матрица тождественного преобразования (в любом базисе) единичная n-го порядка, ядро преобразования
, образ преобразования
, дефект
, ранг
.
3. Обозначим — центральную симметрию n-мерного пространства
(относительно нулевого вектора
), т.е. преобразование, которое каждому вектору ставит в соответствие противоположный ему вектор:
. Это преобразование линейное, инъективное, сюръективное, биективное, обратимое. Матрица преобразования противоположна единичной (в любом базисе):
; ядро преобразования
, образ преобразования
, дефект
, ранг
.
4. Обозначим — гомотетию n-мерного пространства
(с коэффициентом
), т.е. преобразование, которое каждому вектору ставит в соответствие коллинеарный ему вектор:
. Это преобразование линейное. При
оно инъективное, сюръективное, биективное, обратимое. Матрица преобразования пропорциональна единичной (в любом базисе):
, ядро преобразования
, образ преобразования
, дефект
, ранг
. При
(см. пункт 1); при
(см. пункт 2); при
(см. пункт 3).
5. Рассмотрим линейное пространство радиус-векторов (с общим началом в точке
), принадлежащих одной плоскости (рис. 9.1). Обозначим
— поворот вокруг точки
(на угол
в положительном направлении (против часовой стрелки)). Это преобразование линейное, инъективное, сюръективное, биективное, обратимое. Найдем матрицу поворота в стандартном ортонормированием базисе
. Раскладывая образы
базисных векторов по базису, получаем
Составляем матрицу (9.1) преобразования (оператора), записывая найденные координаты образов по столбцам:
Ядро оператора (преобразования) , образ преобразования
, дефект
, ранг
. При
(см. пункт 2); при
(см. пункт 3).
6. Обозначим — оператор дифференцирования, который каждому многочлену степени не выше и ставит в соответствие его производную, рассматриваемую как многочлен степени не выше
. Это преобразование линейное, неинъективное, несюръективное, небиективное, необратимое. Квадратная матрица ((n+l)-го порядка) преобразования в стандартном базисе имеет вид
Ядро преобразования — пространство многочленов нулевой степени, образ
— пространство многочленов степени не выше
, дефект
, ранг
.
Рассмотрим преобразование линейного пространства тригонометрических многочленов (частоты
) с действительными коэффициентами:
, т.е.
— множество функций вида
, где
. Заметим, что это множество является двумерным вещественным линейным пространством. Стандартный базис пространства
образуют функции
, поскольку они линейно независимы (тождественное равенство нулю
возможно только в тривиальном случае
). При дифференцировании функции
получаем функцию
того же вида. Следовательно, преобразование
определено. Это преобразование линейное, инъективное, сюръективное, биективное, обратимое. Найдем матрицу преобразования в стандартном базисе
. Раскладывая образы базисных векторов, получаем
Составляем матрицу (9.1) преобразования, записывая найденные координаты образов по столбцам: . Ядро преобразования
— нулевое подпространство, образ
, дефект
, ранг
,
.
Аналогичными свойствами обладает преобразование , где
— множество функций вида
с комплексными коэффициентами
и
. Множество
является двумерным комплексным линейным пространством.
7. Пусть линейное пространство разлагается в прямую сумму подпространств . Обозначим
— оператор проектирования на подпространство
параллельно подпространству
, который каждому вектору
, где
, ставит в соответствие его составляющую (проекцию)
, т.е.
(рис.9.2). Это преобразование линейное. При
оно неинъективное, несюръективное, небиективное, необратимое. Ядро преобразования
, образ преобразования
, дефект
, Ранг
,. При
; при
.
8. Пусть линейное пространство разлагается в прямую сумму подпространств . Обозначим
— оператор отражения в подпространстве
параллельно подпространству
(или преобразование симметрии относительно подпространства
параллельно подпространству
), который каждому вектору
, где
, ставит в соответствие вектор
, т.е.
(рис. 9.3). Это преобразование линейное, инъективное, сюръективное, биективное, обратимое. Ядро преобразования
, образ преобразования
, дефект
, ранг
. При
.
Матрицы линейного оператора (преобразования) в разных базисах
Найдем связь матриц одного и того же линейного оператора (преобразования) в разных базисах.
Пусть в базисе преобразование
имеет матрицу
, а в базисе
— матрицу
. Если
— матрица перехода от базиса
к базису
, то
(9.4)
Докажем формулу (9.4). Пусть векторы и
в базисах
и
имеют координатные столбцы
и
соответственно. Если
, то по формуле (9.2) имеем
Подставляя в первое равенство связи координат векторов в разных базисах
получаем
или, учитывая обратимость матрицы
. Сравнивая последнее равенство с
, убеждаемся в справедливости (9.4).
Замечания 9.2
1. Матрицы линейного преобразования в разных базисах оказываются подобными. И наоборот, любые две подобные матрицы являются матрицами некоторого линейного преобразования, найденными относительно разных базисов.
2. Для матриц преобразований справедливы свойства, рассмотренные ранее. В частности, при фиксированном базисе матрица суммы преобразований равна сумме их матриц, матрица произведения преобразования на число равна произведению матрицы преобразования на это же число, матрица композиции преобразований равна произведению матриц преобразований, матрица обратного преобразования является обратной для матрицы обратимого преобразования.
Алгебра линейных операторов (преобразований)
Рассмотрим множество — линейных преобразований (операторов) n-мерного линейного пространства
. Напомним, что два преобразования
и
называются равными, если
.
На множестве определены две линейные операции: сложение преобразований и умножение преобразования на число, поскольку в результате этих операций получается линейное преобразование.
Нетрудно показать, что эти операции удовлетворяют условиям:
1. ;
2. ;
3. существует нулевое преобразование такое, что
;
4. для каждого преобразования существует противоположное преобразование
такое, что
;
5. и любого числа
;
6. и любых чисел
;
7. и любых чисел
;
8. .
В условиях 5-7 говорится о числах из того же числового поля, над которым определено линейное пространство .
Условия 1-8 повторяют аксиомы линейного пространства. Поэтому множество с линейными операциями является линейным пространством. Если пространство
вещественное (комплексное), то и пространство
вещественное (комплексное).
Найдем размерность пространства . При фиксированном базисе имеется взаимно однозначное соответствие между линейными преобразованиями и их матрицами, причем это соответствие сохраняет линейные операции. Следовательно, пространство
изоморфно пространству
— квадратных матриц n-го порядка. Размерность пространства
равна
. По теореме 8.3:
то есть
Кроме линейных операций в множестве определена операция умножения элементов. Произведением преобразований
и
назовем их композицию, т.е.
. В результате композиции линейных преобразований получается линейное преобразование. Операция умножения удовлетворяет следующим условиям:
1. ;
2. ;
3. ;
4. существует тождественное преобразование такое, что
.
Первое условие выражает ассоциативность операции умножения, условия 2 и 3 — законы дистрибутивности, условие 4 — существование нейтрального элемента. Множество с операциями сложения и умножения элементов является кольцом с единицей (вообще говоря, некоммутативное, так как в общем случае
).
Операции умножения операторов (преобразований) и произведения операторов на число (из заданного числового поля) удовлетворяют условию:
5.
Линейное пространство, которое является кольцом, удовлетворяющим условию 5, называется алгеброй. Поэтому множество называют алгеброй линейных операторов (преобразований).
Многочлены от линейного оператора (преобразования)
В алгебре можно определить целую неотрицательную степень оператора
, полагая по определению
Пусть — многочлен переменной
. Многочленом
от линейного преобразования
называется преобразование
.
Многочлен называется аннулирующим для линейного преобразования
, если
— нулевое преобразование. Заметим, что у каждого линейного преобразования
n-мерного линейного пространства
существует аннулирующий многочлен степени не выше
. Действительно, система из
элементов
линейного пространства
линейно зависима (так как
). Поэтому существуют такие числа
, не все равные нулю одновременно, что
. Следовательно, многочлен
— аннулирующий для преобразования
.
Замечания 9.3
1. При фиксированном базисе каждому преобразованию (оператору) можно сопоставить его матрицу. Свойства линейных операций 1-8, записанные для матриц преобразований, повторяют свойства линейных операций с матрицами, а свойствам 1-5 произведения операторов отвечают свойства операции умножения матриц.
2. При фиксированном базисе многочлен от линейного преобразования
имеет матрицу
, где
— матрица преобразования
в том же базисе. Поэтому свойства многочленов от матриц переносятся на многочлены от линейного преобразования. В частности, многочлены от одного преобразования перестановочны:
3. Функции от матриц определяются при помощи многочленов от матриц. Поэтому можно определить функции от линейных преобразований.
Математический форум (помощь с решением задач, обсуждение вопросов по математике).
Если заметили ошибку, опечатку или есть предложения, напишите в комментариях.
4.3.5 Линейный оператор и его матрица
Определение. Пусть даны два пространства  и
и  . Если по закону
. Если по закону  каждому вектору
каждому вектору  поставлен в соответствие вектор
поставлен в соответствие вектор  , то говорят, что задан оператор (функция, отображение), отображающий в и пишут
, то говорят, что задан оператор (функция, отображение), отображающий в и пишут  .
.
Обозначение:  ;
;  – образ,
– образ,  – прообраз.
– прообраз.
Определение. Если для любых и из и любых вещественных чисел  и
и  имеет место
имеет место  , то оператор называется линейным.
, то оператор называется линейным.
Произвольные отображения линейных пространств изучаются в курсе математического анализа. В курсе линейной алгебры изучаются лишь линейные отображения.
Пример 6. Оператор действует из  в по закону
в по закону  , где
, где  , и
, и  – фиксированный вектор, например,
– фиксированный вектор, например,  . Оператор переводит вектор из в другой вектор из . Докажем, что он линейный:
. Оператор переводит вектор из в другой вектор из . Докажем, что он линейный: 
 . Здесь воспользовались свойствами векторного произведения.
. Здесь воспользовались свойствами векторного произведения.
Пример 7. Линеен ли оператор  , где произвольный вектор, а вектор – фиксированный?
, где произвольный вектор, а вектор – фиксированный?
Решение.  , так как
, так как  ,
,  . Следовательно, оператор – нелинейный.
. Следовательно, оператор – нелинейный.
Пусть даны два пространства  и
и  и оператор , действующий из в . Пусть в есть базис
и оператор , действующий из в . Пусть в есть базис  , а в – базис
, а в – базис  .
.
Подействовав оператором на базисные векторы пространства , получим векторы из , которые можно разложить по базису  с коэффициентами линейных комбинаций
с коэффициентами линейных комбинаций  :
:

Строим матрицу таким образом, чтобы в ее столбцах стояли координаты образов базисных векторов пространства относительно базисных векторов пространства :
 .
.
Матрица называется матрицей линейного оператора , действующего из в . Таким образом, если оператор  , то матрица этого оператора имеет размер
, то матрица этого оператора имеет размер  , то есть у нее
, то есть у нее  строк и
строк и  столбцов.
столбцов.
Замечание. Если в и выбрать другие базисы, то в этих базисах матрица линейного оператора будет иметь другой вид.
Из определения матрицы линейного оператора следует, что, зная закон (оператор), по которому вектору  сопоставляется вектор
сопоставляется вектор  , можно построить матрицу, и наоборот, любой матрице соответствует некоторый линейный оператор.
, можно построить матрицу, и наоборот, любой матрице соответствует некоторый линейный оператор.
Пример 8. Построить матрицу линейного оператора, действующего из в по закону  , где векторы и
, где векторы и  заданы относительно канонического базиса.
заданы относительно канонического базиса.
Решение. Подействуем оператором на базисные векторы  :
:
 ;
;
 ;
;
 .
.
Таким, образом,  – искомая матрица.
– искомая матрица.
Пример 9. Пусть в выбран базис  ,
,  ,
,  , а в
, а в  выбран базис
выбран базис  ,
,  . Найти матрицу линейного оператора, действующего из в
. Найти матрицу линейного оператора, действующего из в  по закону
по закону  , где
, где  .
.
Решение.  ;
;  ;
;
 ;
;  .
.
Пример 10. Дана матрица  . Найти линейный оператор (закон, по которому действует оператор).
. Найти линейный оператор (закон, по которому действует оператор).
Решение. Матрица – это матрица линейного оператора, действующего из в . Пусть в базис  , в базис
, в базис  . Так как в столбцах матрицы стоят координаты векторов
. Так как в столбцах матрицы стоят координаты векторов  относительно базиса , то
относительно базиса , то
 (1)
(1)
Пусть  произвольный вектор из , где
произвольный вектор из , где  – координаты этого вектора в базисе , тогда
– координаты этого вектора в базисе , тогда  . Действуя оператором на вектор и учитывая линейность оператора, получим:
. Действуя оператором на вектор и учитывая линейность оператора, получим:  .
.
Учитывая (1), имеем:

 .
.
Таким образом, оператор действует по закону
 .
.
Зная матрицу оператора , результат его действия на вектор можно найти в матричной форме. Пусть известна матрица оператора размера с элементами . В этом случае оператор с такой матрицей действует из в . Если  – любой вектор из , то результат действия оператора на вектор можно найти по формуле:
– любой вектор из , то результат действия оператора на вектор можно найти по формуле:
 ,
,
Где  – координаты вектора
– координаты вектора  .
.
Пример 11. Операторы и  действуют в пространстве
действуют в пространстве  по законам
по законам  ,
,  , где
, где  ;
;  (
(  – скалярное произведение векторов и
– скалярное произведение векторов и  ). Найти координаты вектора
). Найти координаты вектора  в каноническом базисе.
в каноническом базисе.
Решение. Координаты вектора  можно найти двумя способами:
можно найти двумя способами:
А) найдем матрицу  .
.
Строим матрицу в каноническом базисе:
 ;
;  ;
;
 .
.
 .
.
Строим матрицу в каноническом базисе:
 ;
;  ;
;
 .
.
 ;
;
 .
.
 .
.
Этот способ решения называется матричным;
Б) операторный способ.
 . Подействуем оператором на вектор :
. Подействуем оператором на вектор :
 , теперь на полученный вектор подействуем оператором :
, теперь на полученный вектор подействуем оператором :
 .
.
Для самостоятельной работы.
1. Оператор действует по закону:
 .
.
Найти его матрицу в каноническом базисе.
Ответ:  .
.
2. Оператор действует в плоскости  и осуществляет зеркальное отражение относительно прямой
и осуществляет зеркальное отражение относительно прямой  . Доказать, что он линейный и найти его матрицу в каноническом базисе.
. Доказать, что он линейный и найти его матрицу в каноническом базисе.
Ответ:  .
.
3. Дана матрица  .
.
А) Найти оператор, матрицей которого является матрица .
Б) Найти образ вектора  .
.
Ответ:  .
.
Как найти матрицу линейного оператора в базисе
Построение матрицы по заданной формуле отображения.
Пусть отображение задано с помощью формулы:
то есть для координат произвольного исходного вектора определены координаты его образа. Тогда, рассматривая вместо произвольного вектора x вектор , найдём его образ, это будет вектор . Для этого в формуле, задающей образ вектора, полагаем , ,…, . Аналогично находим образы для ,…, . Из координат образа вектора составляем 1-й столбец матрицы линейного оператора, аналогично из координат последующих векторов – остальные столбцы. Рассмотрим на примере.
Пример 1. Пусть оператор задан с помощью формулы:
Прежде всего, докажем, что это отображение – действительно линейный оператор.
Отобразим сумму векторов:
Теперь каждую координату получившегося вектора можем преобразовать:
Аналогично для умножения на константу:
Для того чтобы найти матрицу этого линейного оператора, нужно, как было сказано выше, подставить значения x1 = 1, x2 = 0, а затем x1 = 0, x2 = 1. В этом примере образы базисных векторов – соответственно (3, 1) и (2, -1).
Поэтому матрица линейного оператора будет иметь вид:
Аналогичным способом решается задача и для 3 и большего количества переменных.
Пример 2. .
Построим матрицу оператора. Отображая вектор (1,0,0), получаем (1,4,-1), соответственно (0,1,0) переходит в (2,1,-2), а вектор (0,0,1) – в (-1,1,3).
Матрица линейного оператора:
2.2. Построение матрицы оператора в случае, когда известен исходный базис и система векторов, в которую он отображается.
Если задана система из n векторов, образующих базис, и какая-нибудь произвольная система n векторов (возможно, линейно-зависимая), то однозначно определён линейный оператор, отображающий каждый вектор первой системы в соответствующий вектор второй системы.
Матрицу этого оператора можно найти двумя способами: с помощью обратной матрицы и с помощью системы уравнений.
Пусть — матрица оператора в базисе . По условию, для всех индексов . Данные n равенств можно записать в виде одного матричного равенства: , при этом столбцы матрицы — это векторы , а столбцы матрицы — векторы . Тогда матрица может быть найдена в виде .
Пример. Найти матрицу линейного оператора, отображающего базис
в систему векторов .
Здесь , , , и получаем:
Проверка осуществляется умножением получившейся матрицы на каждый вектор: .
Аналогично решаются подобные задачи и для трёхмерного пространства. В приложении (§5) есть несколько вариантов таких задач.
2.3. Прочие способы нахождения матрицы оператора.
Существуют также примеры, где линейный оператор задаётся другими способами, отличными от рассмотренных в п. 2.1 и 2.2.
Пример. Линейными операторами являются как правое, так и левое векторное умножение на фиксированный вектор в трёхмерном пространстве, то есть отображения вида и . Построим матрицу одного из этих операторов, . Для этого найдём образы всех трёх базисных векторов линейного пространства.
Координаты полученных векторов запишем в виде столбцов матрицы оператора.
Аналогично можно построить матрицу линейного оператора :
Пример. Линейный оператор дифференцирования в пространстве всех многочленов степени не более n. Это пространство размерности n + 1. Возьмём в качестве базиса элементы , , ,…, .
Матрица этого линейного оператора:
Линейные операторы могут отображать не только пространства конечной размерности, но и бесконечномерные пространства. Так, оператор дифференцирования может рассматриваться также в пространстве всех непрерывных функций. (В этом пространстве нет конечного базиса). В этом случае, очевидно, оператор не может быть задан матрицей конечного порядка.
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Только сон приблежает студента к концу лекции. А чужой храп его отдаляет. 8829 — | 7543 — или читать все.
78.85.5.224 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Матрица линейного оператора
Определение 1. Если задан закон, который каждому вектору x?? ставит в соот ветствие вектор y . то говорят, что в линейном пространстве ? задан оператор A , при этом пишут:
Определение 2. Оператор A называется линейным, если для любых x 1 ?? и x 2 ?? и произвольного числа ? выполняются условия:
Рассмотрим теперь в евклидовом пространстве E n базис e 1 ,e 2 . e n и пусть в этом пространстве определён линейный оператор A : y = A x .
Разложим векторы x и y по базису e 1 ,e 2 . e n :

В силу линейности оператора A можно написать
Заметим, что каждый вектор  , следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.
, следовательно, его также можно разложить по базису e 1 ,e 2 . e n , т.е.


В силу единственности разложения по данному базису мы можем при равнять коэффициенты при базисных векторах в правых частях формул (1) и (2); тогда получим:
Получили, что линейному оператору A в данном базисе соответствует квадратная матрица
которая называется матрицей линейного оператора A , i -й столбец которой состоит из координат вектора Ae i (i = 1,2. n ) относительно данного базиса. Отметим, что матрица A оператора A зависит от выбора базиса e 1 ,e 2 . e n .
Итак, мы показали, что всякому линейному оператору A в евклидовом пространстве E n соответствует матрица A ; можно доказать и обратное утверждение: всякую квадратную матрицу A можно рассматривать как матрицу некоторого линейного оператора A в данном базисе e 1 ,e 2 . e n .
Представляют интерес невырожденные линейные операторы, т.е. такие операторы, матрицы которых имеют обратную A -1 , т.е. также являются невырожденными. В этом случае каждому вектору y (образу), определённому соотношением, отвечает единственный вектор x (прообраз) и при этом имеет место матричное равенство: X = A -1 ? Y .
Примеры линейных операторов
1. В пространстве 2-мерных векторов линейным оператором является правило
связывающее вектор-прообраз  с вектором-образом
с вектором-образом 
2. В пространстве бесконечно дифференцируемых функций линейным оператором является операция дифференцирования, ставящая в соответствие каждому элементу этого простран ства его производную функцию.
3. В пространстве многочленов P n (t) линейным оператором является операция умножения многочлена на независимую переменную t .
Пример: Известны образы базисных векторов E 3 под действием оператора A :
Найти матрицу этого оператора в исходном базисе.
Решение: По определению y = A x, значит в матричном виде можно записать, что A = X -1 Y . Для нашего примера получаем

Действия над операторами
Сложение линейных операторов. Пусть x?E n , A и B — два линейных оператора в этом пространстве.
Определение 1. Суммой линейных операторов A и B в E n называется оператор C, определяемый равенством Cx = A x + Bx , где x – любой вектор из E n .
Сумма линейных операторов является линейным оператором, причём его матрица C = A + B, где A и B — матрицы линейных операторов A и B .
Умножение линейного оператора на число. Пусть x?E n , линейный оператор A определён в E n , ? — некоторое число.
Определение 2. Произведением линейного оператора A на число ? называется оператор ?A , определяемый равенством  .
.
?A является линейным оператором, а матрица этого линейного оператора получается из матрицы A умножением её на число ? , т.е. она равна ? ? A.
Умножение линейных операторов. Пусть x? E n , y ? E n , z ? E n и кроме того в E n определены линейные операторы A и B таким образом, что y = Bx, z = A y .
Определение 3. Произведением A ? B линейных операторов A и B называется оператор C, определяемый соотношением Cx = A (Bx) .
Таким образом, перемножение линейных операторов состоит в последовательном их применении по отношению к вектору x .
Рассмотрим матрицы – столбцы:
и обозначим через A, B и C — соответственно матрицы линейных операторов A, B и C. Тогда Z = A ? (B ? X) = (A ? B) ? X = C ? X , таким образом, C = A ? B, т.е. матрица произведения линей ных операторов также является линейным оператором.
a) (A ? B)(x + y) = A (B(x + y)) = A (Bx + By) = A (Bx) + A (By) = = (A ? B) ? x + (A ? B) ? y
б) (A ? B)(? x) = A (B(? x)) = A (?Bx) =?A (Bx) =? (A ? B)x
Свойства умножения линейных операторов вытекают из свойств умножения матриц.
Определение 4. Линейные операторы A и В называются равными, если 
 . Равенство операторов обозначается как A = B .
. Равенство операторов обозначается как A = B .
Определение 5. Оператор E называется единичным (или тождественным) оператором, если каждому элементу x линейного пространства  он ставит в соответствие тот же самый элемент, то есть
он ставит в соответствие тот же самый элемент, то есть 
        7.31 .
Решение
        Составим матрицу перехода из координатных столбцов векторов         в базисе         . Получим . Найдём обратную матрицу, используя метод элементарных преобразований над строками. Припишем единичную матрицу справа от матрицы перехода         Первую строку прибавим ко второй и вычтем из третьей, получим         Вторую строку прибавим к первой и дважды вычтем из третьей, получим         Третью строку умножим на (-1). Третью строку, умноженную на (-1) прибавим к первой, получим         Поменяем местами вторую и третью строки         Получилась матрица, которая содержит единичную матрицу слева. Следовательно, в правой части стоит искомая обратная матрица         Сделаем проверку:         Следовательно, обратная матрица найдена верно.
        Матрицу преобразования в базисе         найдём по формуле        
        Ищем произведение
        Тогда
ВНИМАНИЕ! Обратная матрица для всех задач найдена на этой странице. См. выше.
    Вариант 3     Вариант 4     Вариант 6     Вариант 7     Вариант 9     Вариант 11
    Вариант 14     Вариант 18     Вариант 19     Вариант 20     Вариант 21     Вариант 24
    Вариант 25     Вариант 26     Вариант 30     Вариант 31
Линейный оператор
Линейное отображение линейного (векторного) пространства $ mathbb V_ $ в себя $$ mathcal A : mathbb V longmapsto mathbb V $$ называется линейным преобразованием $ mathbb V_ $ или линейным оператором 1) на $ mathbb V_ $.
Напомню свойство линейности: $$ mathcal A (X_1 +X_2)= mathcal A(X_1) + mathcal A(X_2),quad mathcal A (alpha_1 X_1)= alpha_1 mathcal A (X_1), $$ или, в эквивалентном виде: $$ mathcal A(alpha_1 X_1 + alpha_2 X_2)= alpha_1 mathcal A(X_1) + alpha_2 mathcal A(X_2) $$ для $ forall subset mathbb V, forall subset mathbb R mbox mathbb C $ (здесь $ alpha_1,alpha_ 2 $ — константы из $ mathbb R_ $ если $ mathbb V_ $ вещественное пространство, и из $ mathbb C_ $, если оно комплексное).
Примеры линейных операторов
Бóльшую часть примеров пункта ☞ ПРИМЕРЫ ЛИНЕЙНЫХ ОТОБРАЖЕНИЙ представляют именно линейные операторы. Укажу еще несколько, к которым буду часто обращаться.
Все это — примеры линейных операторов. Но вот отображение сдвига $ (x,y,z) mapsto (x+1,y,z+2) $ оператором не является поскольку $$ alpha > (x,y,z) = ( alpha > x, alpha > y, alpha > z) mapsto ( alpha > x+1, alpha > y, alpha > z+2) ne alpha > (x+1,y,z+2) . $$
Пример 2. В пространстве $ mathbb R^ $ отображение ортогонального проецирования на плоскость $ x+y-7, z=0 $ будет линейным оператором (а вот на плоскость $ x+y-7, z=1 $ — не будет!). Вообще, в произвольном пространстве $ mathbb V_ $ разбитом в прямую сумму нетривиальных подпространств $ mathbb V= mathbb V_1 oplus mathbb V_2 $ отображение, сопоставляющее вектору $ X_ $ его проекцию на подпространство $ mathbb V_1 $ параллельно подпространству $ mathbb V_2 $, будет оператором.
Пример 3. В пространстве $ mathbb P_3 $ полиномов с вещественными коэффициентами степеней $ le 3 $ отображение $ mathcal A_ $ действует по правилу
$$ mathcal A (f(x)) = f(x) (x^2-2) pmod , $$ т.е. полином $ f_(x) $ отображается в остаток от деления произведения $ f(x) (x^2-2) $ на $ x^4-x^3-x^2+x $. Это отображение будет оператором в $ mathbb P_3 $. Действительно, если $$ beginf_1(x)(x^2-2) equiv q_1(x)(x^4-x^3-x^2+x)+ r_1(x), , \ f_2(x)(x^2-2) equiv q_2(x)(x^4-x^3-x^2+x)+ r_2(x) , end $$ при $ subset mathbb R[x], deg r_1(x) le 3, deg r_2(x) le 3 $, то $$ (alpha_1 f_1(x)+alpha_2 f_2(x)) (x^2-2) equiv (alpha_1 q_1(x)+alpha_2 q_2(x))(x^4-x^3-x^2+x)+ (alpha_1 r_1(x)+alpha_2 r_2(x)) ; $$ очевидно, что $ deg (alpha_1 r_1(x)+alpha_2 r_2(x)) le 3 $. ♦
Пример 4. Задачу интерполяции можно интерпретировать как построение некоторого отображения. В интерполяционной таблице
$$ beginx & x_1 & x_2 & dots & x_n \ hline y & y_1 & y_2 &dots & y_n end qquad npu qquad , dots, x_, y_,dots,y_ > subset mathbb C $$ будем считать узлы $ _^n $ фиксированными, а значения $ _^n $ — переменными. Эта таблица однозначно определяет интерполяционный полином $ f(x)=A_+A_1x+dots+A_x^ $ со свойством $ f(x_j)=y_j $ при $ j in $. При этом $ >_^ subset mathbb C $. Будет ли получившееся отображение $$ (y_1,dots,y_n) mapsto (A_0,A_1,dots,A_) $$ оператором на $ mathbb C^n $? Покажем, что отображение $$ mathcal A(y_1,dots,y_n) = f(x) in mathbb C[x] $$ является линейным отображением. Действительно, решением задачи интерполяции для таблицы $$ beginx & x_1 & x_2 & dots & x_n \ hline y & alpha y_1 & alpha y_2 &dots & alpha y_n end qquad npu qquad forall alpha in mathbb C $$ является полином $ alpha f(x) $. Если же, вдобавок, решением задачи интерполяции для таблицы $$ beginx & x_1 & x_2 & dots & x_n \ hline y & z_1 & z_2 &dots & z_n end qquad npu qquad ,dots,z_ > subset mathbb C $$ является полином $ g(x)in mathbb C[x], deg g(x) le n-1 $, то решением задачи интерполяции для таблицы $$ beginx & x_1 & x_2 & dots & x_n \ hline y & y_1+z_1 & y_2+z_2 &dots & y_n+z_n end qquad $$ будет полином $ f(x)+g(x) $ и этот полином будет единственным решением среди полиномов степеней $ le n-1 $. Таким образом, линейность отображения $ mathcal A $ установлена. Далее, множество $ mathbb P_ $ полиномов из $ mathbb C[x] $ степеней $ le n-1 $ изоморфно пространству $ mathbb C^n $. Следовательно, «сложное» отображение $$ (y_1,dots,y_n) mapsto f(x)=A_+A_1x+dots+A_x^ mapsto (A_0,A_1,dots,A_) $$ является линейным отображением из $ mathbb C^n $ в $ mathbb C^n $, т.е. оператором на $ mathbb C^n $.
По аналогии с задачей алгебраической интерполяции, можно поставить и задачу тригонометрической интерполяции. Имеем здесь «точку входа» в теорию дискретного преобразования Фурье. ♦
В пространстве $ mathbb P_2 $ оператор действует следующим образом:
$$ mathcal A (x^2+x+1) =2,x+1, mathcal A (x^2-x-1) =2,x^2-1, mathcal A (x+1) =-x^2+x+1 . $$ Вычислить $ mathcal A (x^2) $ и $ mathcal A (x^2+1) $.
Пример 5. В пространстве полиномов степени не выше $ n_ $ с вещественными коэффициентами от $ m_ $ переменных $ x_1,x_2,dots,x_ $ отображение
$$ f(x_1,x_2,dots,x_m) mapsto frac +frac+ dots+ frac $$ яыляется линейным оператором. Этот оператор известен как оператор Лапласа и для него используется символьное обозначение $$ Delta = frac +frac+ dots+ frac , . $$
Пример 6. В линейном пространстве квадратных матриц порядка $ n_ $ с вещественными элементами рассмотрим коммутирующее отображение
$$ mathcal K (X) = AX-XA , $$ а также отображение Ляпунова $$ mathcal V (X) = A^X+XA $$ при произвольной фиксированной квадратной матрице $ A_ $ и $ ^ $ означающем транспонирование. Легко проверить, что оба отображения $ mathcal K $ и $ mathcal V $ являются операторами. ♦
Основные определения
Все введенные для линейного отображения понятия переносятся на этот частный случай. Например, ядром оператора называется множество векторов, отображаемых оператором в нулевой вектор: $$mathcaler (mathcal A)= left ; $$ а образом оператора называется множество всех векторов из $ mathbb V_ $, для каждого из которых существует прообраз в том же пространстве: $$mathcalm (mathcal A)= left .$$
Теорема 1. Множества $ mathcaler (mathcal A) $ и $ mathcalm (mathcal A) $ являются подпространствами пространства $ mathbb V_ $.
Доказать, что для оператора в $ mathbb R^4 $
$$ mathcal A left(beginx_1 \ x_2 \ x_3 \ x_4 end right)= left(beginx_3 \ x_4 \ 0 \ 0 end right) $$ имеет место равенство $ mathcaler (mathcal A) = mathcalm (mathcal A) $.
Для оператора $ mathcal A_ $ его дефектом его называется размерность ядра, а его рангом — размерность образа: $$ operatorname(mathcal A )=dim (mathcaler (mathcal A )) , operatorname(mathcal A )= dim (mathcalm (mathcal A )) . $$ Оператор называется невырожденным если $ operatorname(mathcal A )=0 $.
Пример. В пространстве $ mathbb R^ $ оператор проецирования на плоскость:
$$ mathcal A left(x, y, zright) longmapsto left(x, y, 0 right) $$ является вырожденным поскольку его ядро нетривиально: $ mathcaler (mathcal A)= $. ♦
Следующий результат является следствием теоремы $ 4 $ из ☞ ПУНКТА.
Теорема 2. Имеет место равенство:
$$ dim mathbb V=dim left( mathcaler (mathcal A) right) + dim left( mathcalm (mathcal A) right) = operatorname(mathcal A )+ operatorname(mathcal A ) .$$
Отображение $ mathcal P: mathbb V longmapsto mathbb V $ называется произведением оператора $ mathcal A $ на оператор $ mathcal B $ если $ mathcal P(X)=mathcal A (mathcal B(X)) $ для любого $ Xin mathbb V_ $. Записывать этот факт будем в виде $ mathcal P=mathcal A , mathcal B $.
Теорема 3. Произведение операторов является оператором на $ mathbb V_ $. Операция произведения ассоциативна.
Доказательство. Имеем на основании свойства линейности $$mathcal P (alpha_1X_1+alpha_2X_2)= mathcal A (mathcal B(alpha_1X_1+alpha_2X_2))=mathcal A (alpha_1mathcal B(X_1)+ alpha_2mathcal B(X_2))=$$ $$=alpha_1mathcal A (mathcal B(X_1))+ alpha_2mathcal A (mathcal B(X_2))=alpha_1mathcal P(X_1)+alpha_2(X_2).$$
Далее, для любого вектора $ X_ $: $$mathcal A_1(mathcal A_2mathcal A_3(X))= mathcal A_1(mathcal A_2(mathcal A_3(X)))=mathcal A_1mathcal A_2(_3(X)) ,$$ откуда и следует ассоциативность. ♦
Говорят, что операторы $ mathcal A $ и $ mathcal B $ коммутируют если $ mathcal A , mathcal B = mathcal B , mathcal A $.
Пример. В пространстве полиномов $ mathbb P_ $ рассмотрим дифференциальный оператор
$$mathcal A = xfractimes Box — 1times Box : mathcal A(p(x)) = x p'(x) — p(x) .$$ Этот оператор не коммутирует с обычным оператором дифференцирования $ displaystyle mathcal B= frac$: $$mathcal A (x^2)=x^2, quad mathcal B (mathcal A(x^2))=2,x, quad mathcal B (x^2)=2,x, quad mathcal A (mathcal B (x^2))=0 .$$ ♦
Оператор $ mathcal E $, отображающий произвольный вектор $ Xin mathbb V_ $ в себя : $ mathcal E(X)= X $, называется тождественным на $ mathbb V_ $. Оператор $ mathcal B $ называется (левым) обратным оператору $ mathcal A_ $, если $ mathcal Bmathcal A=mathcal E $. В этом случае оператор $ mathcal A_ $ называют обратимым и записывают: $ mathcal B=mathcal A^ $.
Не всякий оператор обратим.
Пример. В пространстве $ mathbb R^ $ для оператора проецирования на плоскость:
$$ mathcal A left(x, y, zright) longmapsto left(x, y, 0 right) $$ обратного не существует, т.к. $ mathcal A(0,0,1)=(0,0,0) $ и ни при каком выборе оператора $ mathcal B $ нельзя добиться выполнения равенства $ mathcal B(0,0,0)=(0,0,1) $. ♦
Показать, что обратным для оператора
$$fracint_0^x : p(x) longmapsto fracint_^ p(t) d, t ,$$ на $ mathbb P_ $ является оператор $$ fracleft(xtimes Box right) : p(x) longmapsto (xp(x))’ .$$
Теорема 4. Оператор $ mathcal A_ $ обратим тогда и только тогда, когда когда он невырожден: $ operatorname (mathcal A) =0 $. В этом случае $ mathcal A^ $ единствен и коммутирует с $ mathcal A $.
При $ Kin mathbb N $ и $ K>1 $, $ K_ $-я степень оператора $ mathcal A $ определяется рекурсивной формулой $$mathcal A^=mathcal A (mathcal A^) .$$ Если, вдобавок, $ mathcal A $ невырожден, то отрицательная степень оператора определяется формулой $$mathcal A^=left(mathcal A^right)^K . $$ Полагают также $ mathcal A^= $ для любого $ mathcal A ne $.
Теорема 5. Степени оператора $ mathcal A $ коммутируют:
$$mathcal A^ mathcal A^=mathcal A^mathcal A^=mathcal A^ .$$
Пример. $ K_ $-й степенью оператора дифференцирования в пространстве полиномов $ mathbb P_ $ будет оператор нахождения $ K_ $-й производной:
$$left( fracright)^K = frac .$$ Очевидно, что при $ K_>n $ этот оператор будет нулевым. ♦
Пример. В произвольном пространстве $ mathbb V_ $ разбитом в прямую сумму нетривиальных подпространств $ mathbb V= mathbb V_1 oplus mathbb V_2 $ оператор проецирования $ mathcal P $ на подпространство $ mathbb V_1 $ параллельно подпространству $ mathbb V_2 $ обладает свойством $ mathcal P^2 = mathcal P $ (проецирование проекции оставляет ее на месте). ♦
Оператор $ mathcal A $, обладающий свойством $ mathcal A^2 = mathcal A $, называется идемпотентным 3) .
Пример. В пространстве $ mathbb P_3 $ полиномов с вещественными коэффициентами степени $ le 3 $ отображение $ mathcal A_ $ действует по правилу
$$ mathcal A (f(x)) = f(x) (x^2-2) pmod , $$ т.е. полином $ f_(x) $ отображается в остаток от деления произведения $ f(x) (x^2-2) $ на $ x^4-x^3-x^2+x $. Для этого оператора $ K_ $-й его степенью является оператор $$ mathcal B (f(x)) = f(x) (x^2-2)^K pmod . $$ Действительно, если $$ f(x)(x^2-2) equiv q(x)(x^4-x^3-x^2+x)+ r(x) $$ при $ subset mathbb R[x] $ и $ deg r(x) le 3 $, то $$ f(x)(x^2-2)^2 equiv q(x)(x^4-x^3-x^2+x)(x^2-2)+ r(x)(x^2-2) . $$ Но тогда $$ mathcal A^2 (f(x))= mathcal A (r(x)) = r(x) (x^2-2) pmod equiv $$ $$ equiv f(x)(x^2-2)^2 pmod . $$ Завершает доказательство святая индукция по степени $ K_ $… ♦
Пусть задан произвольный полином $ g(x)=b_x^m+b_1x^+dots+b_m $ из $ mathbb R[x] $ или $ mathbb C[x] $. Выражение $$g(mathcal A )= b_0mathcal A^+b_1mathcal A^+dots+b_m$$ будем называть операторным полиномом.
Доказать, что операторные полиномы коммутируют: $ g_1(mathcal A )g_2(mathcal A )=g_2(mathcal A )g_1(mathcal A ) $.
Доказать, что для любого $ mathcal A in om(mathbb V,mathbb V) $ всегда найдется полином $ g_(x) $, $ deg g le n^2+1 $ такой, что $ g(mathcal A)= $.
Сформулируем еще один результат, являющийся частным случаем приведенного в пункте ☞ СВОЙСТВА ЛИНЕЙНЫХ ОТОБРАЖЕНИЙ.
Теорема 6. Пусть $ $ — произвольный базис $ mathbb V_ $, а $ Y_1,Y_2,dots,Y_n $ — произвольные векторы того же пространства. Существует единственный оператор $ mathcal A: mathbb V longmapsto mathbb V $ такой, что
$$ mathcal A(X_1)=Y_1,mathcal A(X_2)=Y_2, dots,mathcal A(X_n)=Y_n .$$
Доказательство. Искомый оператор строится следующим образом. Если $ X=x_1X_1+x_2X_2+dots+x_nX_n $ — разложение произвольного вектора $ X in mathbb V $ по базису, то $$ mathcal A(X)=x_1 Y_1+x_2Y_2+dots+ x_nY_n . $$ Единственность этого оператора доказывается от противного. Любой другой оператор $ mathcal B $, удовлетворяющий условиям $ _^n $, будет действовать на тот же вектор $ X_ $ с тем же результатом: $$ mathcal B(X)=x_1 mathcal B(X_1)+x_2mathcal B(X_2) +dots+ x_nmathcal B(X_n)= x_1 Y_1+x_2Y_2+dots+ x_nY_n= mathcal A(X) . $$ ♦
Таким образом, оператор — как функция, действующая в $ n_ $-мерном линейном пространстве, однозначно определяется заданием на $ n_ $ линейно независимых векторах. В доказательстве теоремы дается и конструктивный способ представления оператора по этим значениям (т.е. строится его “интерполяционная формула” ).
Матрица оператора
Рассмотрим оператор $ mathcal A $ на $ mathbb V_ $ и пусть $ $ — базис $ mathbb V_ $. Являясь частным случаем линейного отображения, оператор должен обладать и соответствующей матрицей. Существенной особенностью, отличающей наш случай от рассмотренного в пункте ☞ МАТРИЦА ЛИНЕЙНОГО ОТОБРАЖЕНИЯ, является невозможность произвола при выборе базиса для $ mathcalm (mathcal A) $. Поскольку $ mathcalm (mathcal A) $ является подпространством $ mathbb V_ $, то было бы слишком большой роскошью иметь два разных базиса для одного и того же пространства.
Найдем координаты образов базисных векторов $ mathcal A (X_1),dots,mathcal A (X_n) $ в том же базисе $ $: $$ left mathcal A(X_1)&=& alpha >>_X_1+ alpha >>_X_2+dots+ alpha >>_X_n, \ mathcal A(X_2)&=& alpha >>_X_1+ alpha >>_X_2+dots+ alpha >>_X_n, \ dots & & qquad dots , \ mathcal A(X_n)&=&alpha_X_1+alpha_X_2+dots+alpha_X_n. end right. $$ Матрица $$ mathbf A= left(beginalpha >>_ & alpha >>_& dots & alpha_ \ alpha >>_ & alpha >>_& dots & alpha_ \ dots & & & dots \ alpha >>_ & alpha >>_& dots & alpha_ end right)_, $$ в столбцах которой стоят координаты образов базисных векторов, называется матрицей оператора $ mathcal A_ $ в базисе $ $.
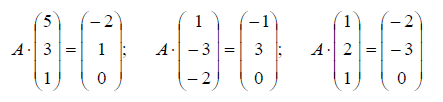
Пример. Известны образы базисных векторов $ mathbb R^ $ под действием оператора $ mathcal A_ $:
$$mathcal A left( begin5 \ 3 \ 1 endright)= left( begin-2 \ 1 \ 0 endright) , mathcal A left( begin1 \ -3 \ -2 endright) = left( begin-1 \ 3 \ 0 endright) , mathcal A left( begin1\ 2 \ 1 endright)= left( begin-2 \ -3 \ 0 endright) . $$ Найти матрицу этого оператора в исходном базисе.
Решение. Элементы матрицы $ $ ищутся по формулам из определения, которые можно переписать в матричном виде: $$left[ X_1,dots,X_n right] =left[ mathcal A (X_1),dots,mathcal A (X_n) right] .$$ Откуда $$= left[ X_1,dots,X_n right]^ left[ mathcal A (X_1),dots,mathcal A (X_n) right] ,$$ и для нашего примера эта формула дает $$ = left(begin5&1&1 \ 3&-3&2 \ 1&-2&1 endright)^ left(begin-2&-1&-2 \ 1&3&-3 \ 0&0&0 endright) = $$ $$ =left(begin1&-3&5\ -1&4&-7\ -3&11&-18 endright) left(begin-2&-1&-2 \ 1&3&-3 \ 0&0&0 endright) = left(begin-5&-10&7\ 6&13&-10\ 17&36&-27 end right). $$ ♦
В пространстве $ mathbb P_3 $ полиномов с вещественными коэффициентами степени $ le 3 $ оператор $ mathcal A_ $ действует по правилу
$$ mathcal A (f(x)) = f(x) (x^3+2,x^2+1) pmod , $$ т.е. полином $ f_(x) $ отображается в остаток от деления произведения $ f(x) (x^3+2,x^2+1) $ на $ x^4+4 $. Найти матрицу оператора $ mathcal A_ $ в базисе $ $.
Ответ. $$ left(begin1 & -4 & -8 & 0 \ 0 & 1 & -4 & -8 \ 2& 0 & 1 & -4 \ 1 & 2 & 0 & 1 end right) . $$
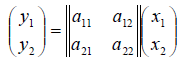
Теорема 1. Координаты произвольного вектора $ X=x_1X_1+dots+x_nX_n $ и его образа $ Y=mathcal A(X)=y_1X_1+dots+y_nX_n $ связаны формулой
$$ left(beginy_1 \ vdots \ y_n end right) = left(beginx_1 \ vdots \ x_n end right) . $$
Как изменяется матрица оператора при переходе к новому базису?
Доказательство ☞ ЗДЕСЬ.
Пример. Оператор $ mathcal A $ в базисе пространства $ mathbb R^ $
Матрицы $ $ и $ $, связанные соотношением $ =C^cdot cdot C $ при какой-то неособенной матрице $ C_ $, называются подобными, этот факт будем записывать: $ doteq $.
Доказать, что отношение подобия есть отношение эквивалентности, и если $ doteq $ то $ g()doteq g() $ при любом полиноме $ g_(x) $.
Теорема 3. Для оператора $ mathcal A_ $ ранг его матрицы является инвариантом, т.е. не зависит от выбора базиса пространства. Этот ранг совпадает с рангом оператора $ mathcal A_ $.
Доказательство. Если $ $ и $ $ — матрицы оператора в двух разных базисах, то они являются подобными: $ =C^ C $. По свойству ранга матрицы имеем: $ operatorname( )= operatorname() $. ♦
Дефект оператора $ mathcal A_ $ совпадает с дефектом его матрицы в произвольном базисе пространства.
Теорема 4. Для оператора $ mathcal A_ $ определитель и след его матрицы являются инвариантами, т.е. не зависят от выбора базиса пространства.
Доказательство. Действительно, для подобных матриц $ $ и $ $, на основании теоремы Бине-Коши имеем: $$ det () = det (C^ C) = det (C^) cdot det () cdot det (C) =det () . $$ Далее, по свойству следа матрицы: $$ operatorname() = operatorname(C^ C)=operatorname( cdot C cdot C^)=operatorname() . $$ ♦
Этот результат позволяет ввести понятие определителя и следа оператора $ mathcal A_ $ — посредством матрицы этого оператора в произвольном базисе пространства. Такое определение оказывается корректным поскольку оба значения не зависят от выбора базиса.
— Для ответа на этот вопрос рассмотрим оператор в $ mathbb R^2 $, заданный формулой: $$ left(beginy_1 \ y_2 end right)= left(begin1 & — 3 \ 1 & -1 end right) left(beginx_1 \ x_2 end right) . $$ Свойство линейности оператора как отображения плоскости проявляется в том, что параллельные отрезки он отображает в параллельные же отрезки (см. упражнение к теореме 2 из ☞ ПУНКТА ), и, следовательно, любой параллелограмм отображается им в параллелограмм. Площади соответствующих параллелограммов оказываются связанными через определитель матрицы — более точно, через модуль этого определителя. В частном случае настоящего примера это проверяется непосредственно; что касается обобщения на произвольное евклидово пространство, в котором понятие объема вводится аксиоматически то сошлюсь на упражнение 3 ☞ ЗДЕСЬ.
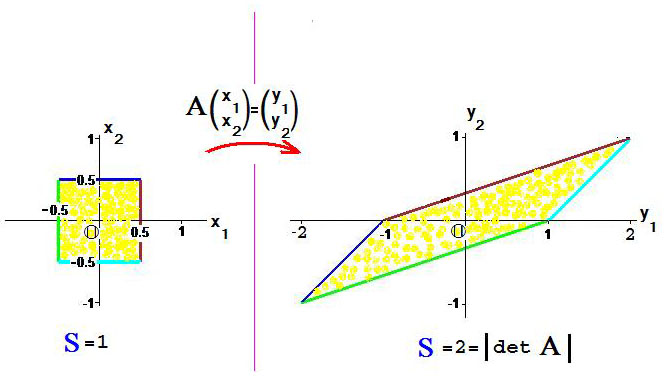
Иными словами: «физический» смысл определителя оператора заключается в том, что модуль его значения представляет коэффициент расширения 4) объема (в настоящем примере — площади) тела (соответственно, плоской фигуры) под воздействием этого оператора.
Теорема 5. Оператор обратим тогда и только тогда, когда когда его определитель отличен от нуля.
Теорема 6. Линейное пространство $ om(mathbb V,mathbb V) $ операторов на $ mathbb V_, dim mathbb V = n $ изоморфно линейному пространству квадратных матриц порядка $ n_ $ (с элементами из $ mathbb R_ $ или из $ mathbb C_ $).
Это утверждение является простым следствием теоремы 2, приведенной в пункте ☞ МАТРИЦА ЛИНЕЙНОГО ОТОБРАЖЕНИЯ. Однако в случае операторов установленный изоморфизм сохранит не только результат операции сложения, но и результат операции умножения: $$ . mbox mathcal A_1 leftrightarrow mathbf A_1, mathcal A_2 leftrightarrow mathbf A_2, mbox mathcal A_1+ mathcal A_2 leftrightarrow mathbf A_1 + mathbf A_2, lambda mathcal A_1 leftrightarrow lambda mathbf A_1 , mathcal A_1 mathcal A_2 leftrightarrow mathbf A_1 mathbf A_2 . $$ Я сформулирую этот «усиленный вариант» изоморфизма в виде набора свойств, которыми буду пользоваться по мере возникновения потребности.
Теорема 7. В любом базисе пространства
а) матрица нулевого оператора $ mathcal O $ является нулевой матрицей $ mathbb O_ $, а матрица тождественного оператора $ mathcal E $ является единичной матрицей $ E_ $; обратно: если матрица оператора в этом базисе — нулевая (единичная), то оператор является нулевым (соответственно, тождественным);
б) матрица произведения операторов совпадает с произведением матриц этих операторов 5) ;
в) коммутирующим операторам соответствуют коммутирующие матрицы;
г) если $ $ — матрица оператора, то $ ^ $ — матрица обратного оператора;
д) если $ $ — матрица оператора $ mathcal A $, то матрицей операторного полинома $ g (mathcal A) $ является матрица $ g() $ .
Матрица оператора и матрица перехода от базиса к базису
Эти матрицы как-то взаимодействовали между собой в предыдущем пункте, хотя вторая была определена совершенно в другом разделе. Обе матрицы квадратные, обе имеют в определении «завязку» на базис пространства $ mathbb V_ $. У начинающих изучать теорию часто возникает путаница при различении этих определений.
«Физический» смысл этих понятий различен. Образно говоря, если рассматривать оператор как процесс (точнее: установленную связь между входными и выходными значениями процесса), то выбор базиса можно интерпретировать как выбор точки зрения на этот процесс (можно трактовать эти слова как формализацию выражения «рассмотрим этот процесс под другим углом»).
Тем не менее, с чисто формальной точки зрения, матрица $ C_ $ перехода от базиса $ $ пространства $ mathbb V_ $ к какому-то другому базису $ $ того же пространства может считаться матрицей некоторого оператора, действующего в этом пространстве. В самом деле, на основании теоремы, приведенной в конце ☞ ПУНКТА, существует единственный оператор $ mathcal C $, переводящий старые базисные векторы в новые, взятые в той же последовательности: $$ mathcal C (X_1)=mathfrak X_1, mathcal C (X_2)= mathfrak X_2, dots, mathcal C (X_n)= mathfrak X_n . $$ Но тогда, по определению, матрица оператора $ mathcal C $ в базисе $ $ совпадает с матрицей $ C_ $ перехода от базиса $ $ к базису $ $.
Я буду записывать матрицы операторов и матрицы переходов от базиса к базису в разных стилях: $ mathbf A, mathbf B,dots $ и, соответственно, $ C, P, T, dots $ — с целью быстрого распознавания их «физической» сущности.
Матрица оператора проецирования
Настоящий пункт может быть пропущен при первоначальном чтении.
Теорема. Рассмотрим линейную оболочку линейно независимой системы столбцов $ subset mathbb R^n $.
$$ mathbb M =left subset mathbb R right>= mathcal L (Y_1,dots,Y_k) , . $$ Пусть скалярное произведение векторов $ X_ $ и $ Y_ $ задается стандартным способом, т.е. $ langle X,Y rangle =x_1y_1+dots+x_ny_n $. Ближайшей к точке $ X_0 subset mathbb R^n $ точкой многообразия (или ортогональной проекцией точки $ X_0 $ на многообразие) $ mathbb M_ $ является $$ X_ = mathbf L (mathbf L^ mathbf L )^ mathbf L^ X_0 , . $$ Здесь $ mathbf L=[Y_1 |dots |Y_k]_ $.
Доказательство. Пусть $ X_0=X_0^>+X_0^> $, где $ X_0^> $ — ортогональная проекция точки $ X_0 $ на $ mathbb M $, а $ X_0^> $ — ортогональная составляющая. Тогда $$ mathbf L^ X_0^>=mathbb O $$ поскольку $ Y_1^ X_0^>=0,dots, Y_k^ X_0^>=0 $. Далее, $ X_0^> $ можно разложить по базису $ $: $$ X_0^>=alpha_1 Y_1+dots+ alpha_k Y_k quad npu quad subset mathbb R , . $$ Следовательно, $$ mathbf L^ X_0=mathbf L^ (X_0^>+X_0^>)=mathbf L^ X_0^>= mathbf L^ (alpha_1 Y_1+dots+ alpha_k Y_k)= $$ $$ =left( beginalpha_1 Y_1^ Y_1 +dots + alpha_k Y_1^ Y_k \ alpha_1 Y_2^ Y_1 +dots + alpha_k Y_2^ Y_k \ dots \ alpha_1 Y_k^ Y_1 +dots + alpha_k Y_k^ Y_k end right)= mathbf L^ mathbf L left( beginalpha_1 \ alpha_2 \ vdots \ alpha_k end right), . $$ Тогда $$ mathbf L (mathbf L^ mathbf L )^ mathbf L^ X_0= mathbf L left( beginalpha_1 \ alpha_2 \ vdots \ alpha_k end right) =alpha_1 Y_1+dots+ alpha_k Y_k= X_0^> , . $$ На основании теорем $ 1_ $ и $ 2_ $, приведенных ☞ ЗДЕСЬ, точка $ X_0^> $ является ближайшей точкой многообразия $ mathbb M $ к точке $ X_ $. ♦
Матрица $ P=mathbf L (mathbf L^ mathbf L )^ mathbf L^ $ является матрицей оператора ортогонального проецирования на многообразие $ mathbb M_ $ в стандартном базисе $$ bigg_j = big[underbrace_,0,dots,0big]^ bigg>_^n , . $$ Она симметрична и идемпотентна, т.е. обладает свойством $ P^2=P $.
Пример. В $ mathbb R^ $ найти матрицу проецирования на плоскость $ x+y+z=0 $.
Решение. Параметрическое задание плоскости: $$ mathbb M=>_ + lambda_2 underbrace>_ big| subset mathbb R > , . $$ Имеем: $$ mathbf L= left(begin1 & 0 \ -1 & 1 \ 0 & -1 end right) Rightarrow mathbf L^ mathbf L= left(begin2 & -1 \ -1 & 2 end right) Rightarrow (mathbf L^ mathbf L )^= left(begin2/3 & 1/3 \ 1/3 & 2/3 end right) Rightarrow $$ $$ Rightarrow mathbf L (mathbf L^ mathbf L )^ mathbf L^= frac left(begin2 & -1 & -1 \ -1& 2 & -1 \ -1 & -1 & 2 end right) , . $$ ♦
Матрица оператора отражения (оператора Хаусхолдера)
Настоящий пункт может быть пропущен при первоначальном чтении.
В пространстве $ mathbb R^n $ со стандартным скалярным произведением рассмотрим плоскость, заданную уравнением $$ C^X= c_1x_1+c_2x_2+dots+c_nx_n = 0 $$ при векторе нормали $ C^=(c_1,c_2,dots,c_n) $ единичной длины: $ |C|^2= C^C=1 $. Действие оператора зеркального отражения или оператора Хаусхолдера 6) относительно этой плоскости на вектор (точку) $ X in mathbb R^n $ определим правилом $$ mathcal H( X^> + X^>)= X^> — X^> ; $$ здесь $ X^> $ — ортогональная проекция вектора $ X_ $ на заданную плоскость, а $ X^> $ — ортогональная составляющая вектора $ X_ $ относительно этой плоскости.
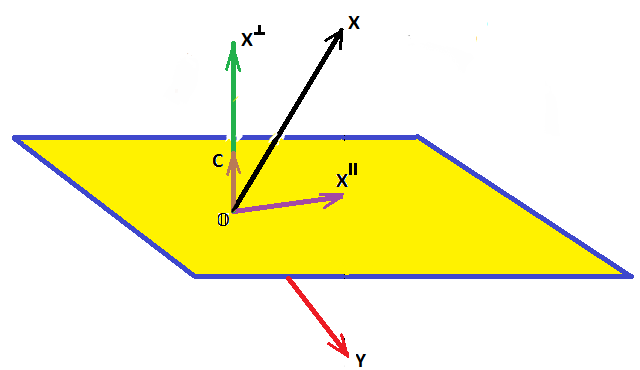
Теорема. Оператор $ mathcal H $ задается уравнением
$$ mathcal H(X)=X-2, langle X,C rangle C=X-2, C (C^X)= X-2, C^XC , . $$
Доказательство. $$ mathcal H( X^> + X^>)=X^> + X^>-2, langle X^>,C rangle C-2, langle X^>,C rangle C = $$ Поскольку $ X^> $ ортогонален, а вектор $ X^> $ коллинеарен вектору $ C $ единичной длины, то $$= X^> + X^> — 2, X^> = X^> — X^> , . $$ ♦
Теорема. Матрица оператора $ mathcal H $ в стандартном базисе
$$ bigg_j = big[underbrace_,0,dots,0big]^ bigg>_^n , . $$ имеет вид $$ mathbf H_= E-2, C cdot C^ = left( begin1-2c_1^2 & -2,c_1c_2 & dots & — 2 c_1 c_n \ -2,c_1c_2 & 1-2c_2^2 & dots & — 2 c_2 c_n \ vdots & & & vdots \ — 2 c_1 c_n & — 2 c_2 c_n & dots & 1-2c_n^2 end right) , . $$
Пример. Найти зеркальное отражение точки $ [3,2,3] $ относительно плоскости $ 2,x-2,y+z = 0 $.
Решение. Здесь $ C^=[2/3,-2/3,1/3] $ и $$ mathcal H(X)= left( begin3 \ 2 \ 3 end right) — 2([3,2,3],[2/3,-2/3,1/3]) left( begin2/3\ -2/3 \ 1/3 end right)= left( begin7/9 \ 38/9 \ 17/9 end right) , . $$ Проверим результат посредством матричного представления: $$ mathbf H_C= left( begin1/9 & 8/9 & -4/9 \ 8/9 & 1/9 & 4/9 \ -4/9 & 4/9 & 7/9 end right) quad Rightarrow quad mathbf H left( begin3 \ 2 \ 3 end right)= left( begin7/9 \ 38/9 \ 17/9 end right) , . $$ ♦
Матрица $ mathbf H_ $ одновременно симметрична и ортогональна, и $ det mathbf H_=-1 $. Следовательно, ей обратная существует и совпадает с ней самой: $$ mathbf H_^= mathbf H_ , . $$
Инвариантное подпространство
Задача. Подобрать базис пространства $ mathbb V_ $ так, чтобы матрица заданного оператора $ mathcal A_ $ имела наиболее простой вид.
Исследуем действие оператора $ mathcal A $ на произвольное подпространство $ mathbb V_1 subset mathbb V $: $$mathcal A (mathbb V_1)= left .$$ Вообще говоря, множества $ mathbb V_1 $ и $ mathcal A (mathbb V_1) $ будут различными, т.е. $ exists X_1 in mathbb V_1 $ такой, что $ mathcal A (X_1)notin mathbb V_1 $.
Подпространство $ mathbb V_1 $ называется инвариантным подпространством оператора $ mathcal A $, если оно отображается этим оператором в себя: $$ mathcal A(mathbb V_1)subset mathbb V_1 .$$
$ mathbb V_1= $ и $ mathbb V_1=mathbb V $ — тривиальные инвариантные подпространства произвольного оператора $ mathcal A $.
Нас будут интересовать нетривиальные инвариантные подпространства.
Пример. Оператор
$$left(beginx \ y \ z end right) longmapsto left(begin/ & —/ & 0 \ / & / & 0 \ 0 & 0 & 1 end right) left(beginx \ y \ z end right) $$ задает в пространстве поворот вокруг оси $ mathbb O z $ на угол $ +pi /4 $. Нетривиальными инвариантными подпространствами будут
а) ось вращения $ mathbb V_1=> mid z in mathbb R> $, $ dim mathbb V_1=1 $ и
б) плоскость, перпендикулярная оси вращения $ mathbb V_2=> mid subset mathbb R> $, $ dim mathbb V_2= 2 $. ♦
Пример. Оператор
$$left(beginx \ y end right) longmapsto left(beginlambda_1 x \ lambda_2 y end right) $$ задает на плоскости «растяжение»: $ x_ $-компонента увеличивается в $ lambda_ $ раз, а $ y_ $-компонента — в $ lambda_ $ раз. При любой комбинации коэффициентов растяжения координатные оси будут инвариантными подпространствами. Однако в частном случае $ lambda_1=lambda_2 $ инвариантной будет также любая прямая, проходящая через начало координат. ♦
Пример. Оператор в $ mathbb R^_ $ задан блочной матрицей
$$X longmapsto left( begin_1 & \ mathbb O & _2 end right) X $$ где $ _1 $ — $ n_1times n_1 $-матрица, $ _2 $ — $ (n-n_1)times (n-n_1) $-матрица. Множество столбцов $$mathbb V_1=left,0,dots,0]^> bigg| > subset mathbb R right>$$ образует инвариантное подпространство, $ dim mathbb V_1=n_1 $. Если же, вдобавок, матрица, обозначенная $ $ — нулевая, то вторым инвариантным подпространством будет $$ mathbb V_2=left,dots,x_n]^> bigg| ,dots, x_n > subset mathbb R right> .$$ ♦
Теорема. $ mathcaler (mathcal A) $ и $ mathcalm(mathcal A) $ — инвариантные подпространства оператора $ mathcal A $.
Доказать, что сумма двух инвариантных подпространств является инвариантным подпространством.
Теорема. Если пространство $ mathbb V_ $ раскладывается в прямую сумму подпространств, инвариантных относительно оператора $ mathcal A $, то существует базис пространства, в котором матрица оператора будет блочно-диагональной.
Теорема обобщается очевидным образом на произвольное число слагаемых подпространств: $ mathbb V=mathbb V_1oplus mathbb V_2 oplus dots oplus mathbb V_k $. Если при этом $ dim mathbb V_1= dots = dim mathbb V_k=1 $, то матрица оператора в базисе, полученном объединением базисных векторов слагаемых подпространств, становится диагональной — это и является решением задачи, поставленной в начале пункта.
Собственное число и собственный вектор
Задача. Найти одномерные инвариантные подпространства оператора.
Вектор $ X_in mathbb V $ называется собственным вектором оператора $ mathcal A_ $, если $$ X ne mathbb O, quad u quad exists lambda in mathbb C qquad mbox qquad mathcal A(X)=lambda X .$$ В этом случае число $ lambda_ $ называется собственным или характеристическим числом оператора, соответствующим (или принадлежащим) данному собственному вектору; обратно, говорят, что вектор $ X_ $ принадлежит собственному числу $ lambda_ $.
Пример. Оператор
$$left(beginx \ y end right) longmapsto left(begin1 & — 5/2 \ -1/2 & 2 end right) left(beginx \ y end right) $$ задает отображение плоскости $ mathbb R^2 $. На рисунке показан результат действия этого отображения на единичную окружность. Все точки плоскости, за исключением начала координат $ mathbb O_ $, изменят свое положение — ни одна не останется на месте.
Если рассмотреть эти точки как концы векторов, имеющих начало в $ mathbb O_ $, то смещения точек под действием оператора можно представить в виде двух составляющих: растяжения (т.е. увеличения расстояния до начала координат) и поворота вокруг начала координат на некоторый угол. И только по двум направлениям плоскости поворота не происходит. Точки окружности с координатами $$ pm left( 0.823, -0.568 right)^ quad u quad pm left( 0.960, 0.278 right)^ $$ будут смещаться без поворота. Эти точки и задают координаты конца собственного вектора. А соответствующие им собственные числа $ 2.725 $ и $ 0.275 $ определяют коэффициенты сдвига. Если вообразить оператор как деформацию физической среды, заполняющей плоскость, то можно сказать, что cобственный вектор задает направление, на котором действие оператора сводится к растяжению, при этом коэффициент растяжения и будет собственным числом.
Анимация процесса ☞ ЗДЕСЬ (1500 Kb, gif).
Пример другого оператора $$ left(beginx \ y end right) longmapsto left(begin1 & — 3 \ 1 & -1 end right) left(beginx \ y end right) $$ показывает, что существование вещественных собственных чисел вовсе не гарантировано даже в случае оператора в вещественном пространстве: в этом примере все точки плоскости повернутся вокруг начала координат. ♦
Доказать, что $ operatorname (mathcal A) ne 0 $ тогда и только тогда, когда оператор $ mathcal A_ $ имеет собственное число, равное нулю.
Теорема. Любой собственный вектор оператора порождает его одномерное инвариантное подпространство, и обратно: любой ненулевой вектор одномерного инвариантного подпространства оператора является собственным вектором.
Пример. В пространстве $ mathbb P_3 $ полиномов с вещественными коэффициентами степени $ le 3 $ оператор $ mathcal A_ $ действует по правилу
$$ mathcal A (f(x)) = f(x) (x^2-2) pmod , $$ т.е. полином $ f_(x) $ отображается в остаток от деления произведения $ f(x) (x^2-2) $ на $ x^4-x^3-x^2+x $. Найти собственные векторы этого оператора.
Решение. В пространстве $ mathbb P_3 $ векторами являются полиномы, а условие того, что полином $ f_(x) $ является собственным, принадлежащим числу $ lambda_ $, записывается в виде: $$ f(x)(x^2-2)equiv lambda f(x) pmod quad iff $$ $$ iff quad f(x)(x^2-2-lambda)equiv 0 pmod . $$ Поскольку $ deg f le 3 $, то последнее может выполняться тогда и только тогда, когда полином $ x^2-2-lambda $ имеет общие корни с $ x^4-x^3-x^2+x equiv x(x+1)(x-1)^2 $. Из этого условия вытекает, что число $ lambda_ $ может принимать только два значения: $ lambda_1=-2 $ и $ lambda_2=-1 $. Если $ lambda_1=-2 $ является собственным числом, то ему соответствующий собственный вектор — полином степени $ le 3 $ — должен определяться из условия делимости $ f(x)x^2 $ на $ x(x+1)(x-1)^2 $. Такой полином имеет вид $ t(x+1)(x-1)^2 $ при произвольной константе $ t_ $. Следовательно множество $$ $$ является множеством собственных векторов, принадлежащих $ lambda_1=-2 $.
С числом $ lambda_2=-1 $ поступаем аналогично. Условие делимости полинома $ f(x)(x^2-1) $ на $ x(x+1)(x-1)^2 $ дает также бесконечное множество: $$ subset mathbb R > . $$ Однако в этом случае бесконечность множества качественно иная, чем в предыдущем случае; она — «двумерная». ♦
Задача. Для произвольного оператора выяснить условия существования его собственного числа и разработать конструктивный метод его нахождения.
Теорема. В комплексном линейном пространстве любой оператор имеет по крайней мере один собственный вектор.
Доказательство. Пусть $ > $ — произвольный базис пространства $ mathbb V_ $ и $ mathbf A_ $ — матрица оператора $ mathcal A_ $ в этом базисе. Тогда для того чтобы вектор $ X=x_1X_1+cdots+x_nX_n ne mathbb O $ был собственным, принадлежащим собственному числу $ lambda_ $, необходимо и достаточно чтобы выполнялось равенство $$ left(beginx_1 \ x_2 \ vdots \ x_n end right) = lambda left(beginx_1 \ x_2 \ vdots \ x_n end right) quad Longleftrightarrow quad left(beginalpha_ — lambda & alpha_& dots & alpha_ \ alpha_ & alpha_— lambda& dots & alpha_ \ dots & & & dots \ alpha_ & alpha_& dots & alpha_— lambda end right) left(beginx_1 \ x_2 \ vdots \ x_n end right) = mathbb O_ $$ Покажем, что существуют комплексные числа $ lambda_ $ и не все нулевые $ x_1,dots,x_ $, удовлетворяющие этой системе. Необходимым и достаточным условием существования нетривиального решения у однородной системы линейных уравнений с квадратной матрицей является равенство нулю определителя этой матрицы: $$ det (-lambda E)=left|beginalpha_ — lambda & alpha_& dots & alpha_ \ alpha_ & alpha_— lambda& dots & alpha_ \ dots & & & dots \ alpha_ & alpha_& dots & alpha_— lambda end right|=0 . $$ Этот определитель является полиномом степени $ n_ $ по $ lambda_ $. По основной теореме высшей алгебры этот полином имеет по крайней мере один комплексный корень $ lambda=lambda_ $. Подставив его в систему, получаем однородную систему уравнений с нулевым определителем. Находим нетривиальное решение этой системы: $$ x_1=x_^,dots,x_n=x_^, quad exists x_^ ne 0 ; $$ но тогда вектор $ _= x_^X_1+cdots+x_^X_n $ будет собственным вектором оператора $ mathcal A_ $, принадлежащим $ lambda_^ $. ♦
Уравнение $ det (-lambda E)= 0 $ называется характеристическим или вековым уравнением, а полином в левой его части — характеристическим полиномом матрицы $ $. Любой корень характеристического полинома матрицы называется собственным числом этой матрицы. Набор всех собственных чисел матрицы (корней характеристического полинома с учетом кратностей) называется спектром матрицы. Ненулевой вектор $ X in mathbb C^n $, удовлетворяющий условию $ X= lambda X $, где $ lambda $ — собственное число матрицы, называется собственным вектором матрицы, соответствующим (или принадлежащим) данному собственному числу.
Пример. Применим полученный результат для получения альтернативного решения предыдущего примера.
Решение. Базисом в пространстве $ mathbb P_3 $ выберем $ $. Образы базисных векторов под действием оператора $ mathcal A (f(x)) = f(x) (x^2-2) pmod $: $$ left mathcal A (1) =&-2& &+x^2& ,\ mathcal A (x) =&&-2,x &&+x^3 ,\ mathcal A (x^2) =& &-x &-x^2 &+x^3, \ mathcal A (x^2) =& &-x & & , end right. qquad Rightarrow qquad = left(begin-2 & 0 & 0 & 0 \ 0 & -2 & -1 & -1 \ 1& 0 & -1 & 0 \ 0 & 1 & 1 & 0 end right) . $$ Характеристический полином матрицы $ $: $$ left|begin-2-lambda & 0 & 0 & 0 \ 0 & -2-lambda & -1 & -1 \ 1& 0 & -1-lambda & 0 \ 0 & 1 & 1 & -lambda end right|equiv (lambda+2)(lambda^3+3,lambda^2+3,lambda+1)equiv (lambda+2)(lambda+1)^3 . $$ Собственные числа $ lambda_1=-2 $ и $ lambda_2=-1 $, спектр матрицы $ $. Подставляем каждое из собственных чисел в матрицу $ -lambda E $ и решаем получившиеся системы однородных уравнений. Поскольку каждая из них должна иметь бесконечное множество решений, то мы строим фундаментальные системы решений (ФСР) $$ begin& (-lambda E)X=mathbb O & \ swarrow > & & searrow > \ lambda_1=-2 & & lambda_2=-1 \ Downarrow & & Downarrow \ left(begin0 & 0 & 0 & 0 \ 0 & 0 & -1 & -1 \ 1& 0 & 1 & 0 \ 0 & 1 & 1 & 2 end right) left(beginx_1 \ x_2 \ x_3 \ x_4 end right)= mathbb O & & left(begin-1 & 0 & 0 & 0 \ 0 & -1 & -1 & -1 \ 1& 0 & 0 & 0 \ 0 & 1 & 1 & 1 end right) left(beginx_1 \ x_2 \ x_3 \ x_4 end right)= mathbb O . \ Downarrow > & & Downarrow > \ x_1=1,x_2=-1,x_3=-1,x_4=1 & & left x_1=0,x_2=-1,x_3=1,x_4=0 \ x_1=0,x_2=-1,x_3=0,x_4=1 end right> end $$ Таким образом, собственному числу $ lambda_1=-2 $ соответствует собственнный вектор — полином $ 1-x-x^2+x^3 $, и он полностью совпадает с полученным при решении предыдущего примера. В то же время собственному числу $ lambda_2=-1 $ соответствует два линейно независимых собственнных вектора — полиномы $ -x+x^2 $ и $ -x+x^3 $. Любой (не тождественно нулевой) полином множества $$ subset mathbb R > $$ будет также являться собственным, принадлежащим $ lambda_2=-1 $. Это множество также совпадает с полученным при решении предыдущего примера. ♦
Итак, два формально различных подхода к решению одного и того же примера не привели к противоречию. Хотелось бы, однако, гарантировать глобальную непротиворечивость определения собственных чисел и векторов — т.е. независимость (инвариантность) этих объектов относительно способов их нахождения, и, в частности, от выбора базиса пространства $ mathbb V_ $.
Теорема. Характеристические полиномы подобных матриц одинаковы.
Доказательство. $ doteq iff exists $ неособенная матрица $ C_ $, такая что $ =C^ C $. Имеем: $$det (-lambda E)=det (C^ C-lambda E)=$$ $$= det (C^ C-lambda C^EC)=det left[ C^ ( -lambda E)C right] = det (-lambda E) .$$ ♦
Иначе говоря, для оператора $ mathcal A_ $ характеристический полином его матрицы не зависит от выбора базиса пространства. Поэтому можно говорить о характеристическом полиноме оператора $ mathcal A_ $.
Теорема [Гамильтон, Кэли]. Результатом подстановки оператора в собственный характеристический полином будет нулевой оператор.
Пример. Для рассмотренного в предыдущих примерах оператора
$$ mathcal A (f(x)) = f(x) (x^2-2) pmod , $$ действующего в $ mathbb P_3 $, характеристический полином равен
$$ lambda^4+5,lambda^3+9,lambda^2+7,lambda+2 , .$$ Проверим утверждение теоремы Гамильтона-Кэли — должно быть выполнено условие $$ mathcal A^4+5,mathcal A^3+9,mathcal A^2+7,mathcal A +2, mathcal E = mathcal O . $$ Степени данного оператора $ mathcal A_ $ обсуждались в примере ☞ ПУНКТА. Переписанное в терминах остатков, последнее условие превращается в $$ (x^2-2)^4f(x)+5,(x^2-2)^3f(x)+9,(x^2-2)^2f(x)+7,(x^2-2)f(x) + $$ $$+2,f(x) equiv 0 pmod , $$ т.е. полином, стоящий в левой части сравнения, должен делиться нацело на $ x^4-x^3-x^2+x $ при любом выборе полинома $ f_(x) $. Проверяем: $$ (x^2-2)^4+5,(x^2-2)^3+9,(x^2-2)^2+7,(x^2-2)+2 equiv $$ $$equiv x^8-3,x^6+3,x^4-x^2 equiv (x^4+x^3-x^2-x)(x^4-x^3-x^2+x) , $$ т.е. утверждение оказывается справедливым. ♦
Диагонализуемость матрицы оператора
Теорема 1. Собственные векторы оператора, принадлежащие различным собственным числам, линейно независимы.
Теорема 2. Если оператор имеет $ n=dim mathbb V $ линейно независимых собственных векторов, то в базисе ими образуемом матрица оператора диагональна. Обратно: если матрица оператора в некотором базисе диагональна, то каждый вектор этого базиса является собственным для оператора.
Базис линейного пространства, состоящий из собственных векторов оператора $ mathcal A_ $, называется каноническим.
[Матричная версия теоремы]. Пусть $ A_ $ — квадратная матрица. Неособенная матрица $ C_ $, удовлетворяющая равенству
$$C^ A C= A_ quad mbox A_ quad mbox $$ существует тогда и только тогда, когда существует базис пространства $ mathbb C^_ $, состоящий из собственных векторов матрицы $ A_ $. Тогда матрица $ C_ $ является матрицей перехода от стандартного базиса $$ bigg_j = big[underbrace_,0,dots,0big]^ bigg>_^n $$ к каноническому, а на диагонали $ A_ $ стоят собственные числа матрицы $ A_ $: $$ A_= left( beginlambda_1 & 0 & dots & 0 \ 0 & lambda_2 & dots & 0 \ & & ddots & \ 0 & 0 & dots & lambda_n end right) . $$
Доказательство. Проведем формальное доказательство данного конкретного частного случая. Рассмотрим матричное равенство $$ A C= CA_ $$ при некоторой диагональной матрице $ A_ $. Легко видеть, что оно эквивалентно системе равенств относительно столбцов матрицы $ C_ $: $$ AC_=d_1 C_,dots, AC_=d_n C_ , . $$ Если все столбцы $ >_^n $ ненулевые, то тогда они являются собственными векторами для матрицы $ A_ $, а числа $ >_^n $ — собственными числами, соответствующими этим собственным векторам. Если матрица $ C_ $ невырождена, то все ее столбцы линейно независимы. Но тогда они образуют базис пространства $ mathbb C^n $, состоящий из собственных векторов. Обратное тоже верно. ♦
При выполнении условия предыдущего следствия говорят, что матрица $ A_ $ диагонализуема или приводится к диагональной форме 7) .
Теорема позволяет сформулировать достаточное условие диагонализуемости.
Теорема 3. Если характеристический полином оператора не имеет кратных корней, то матрица оператора диагонализуема.
Это условие не является необходимым, как показывает пример тождественного оператора .
Случай существования кратного корня у характеристического полинома является «пограничным»: существуют примеры как диагонализуемых, так и недиагонализуемых матриц. Так, для матриц $$ A= left( begin0 &1 \ -1 &2 end right) quad mbox quad A= left( begin1 &0 \ 1&1 end right) $$ при попытке подобрать матрицу $ C_ $, удовлетворяющую равенству $$AC=C left( beginalpha_1 &0 \ 0 & alpha_2 end right) qquad npu forall subset mathbb C $$ получим: $ det C=0 $.
В случае наличия у характеристического полинома оператора кратного корня, анализ оператора на возможность диагонализуемости его матрицы усложняется.
Теорема 4. Множество собственных векторов оператора, принадлежащих его собственному числу $ lambda_^ $ , дополненное нулевым вектором, образует линейное подпространство пространства $ mathbb V_ $.
Это подпространство $$ mathbb V_ = mathcaler (mathcal A- lambda_ mathcal E) $$ пространства $ mathbb V_ $ называется собственным подпространством оператора, соответствующим $ lambda_^ $. Величина $$ dim (mathcaler (mathcal A- lambda_ mathcal E)) $$ называется геометрической кратностью собственного числа $ lambda_^ $. Можно доказать, что геометрическая кратность собственного числа не превосходит кратности собственного числа в характеристическом полиноме. Для акцентирования различий в определениях двух кратностей, кратность собственного числа в характеристическом полиноме называют еще алгебраической кратностью собственного числа.
Если оператор (в некотором базисе пространства) задан своей матрицей $ mathbf A^ $, то базисные векторы собственного подпространства $ mathbb V_ $ вычисляются посредством нахождения фундаментальной системы решений (ФСР) системы линейных уравнений $$ (mathbf A- lambda_ E) X=mathbb O . $$
Теорема 5. Матрица оператора диагонализуема тогда и только тогда, когда для каждого ее собственного числа алгебраическая кратность равна геометрической кратности:
Диагонализуема ли матрица оператора
$$ mathcal A (f(x)) = f(x) (x^2-2) pmod , $$ рассмотренного в примерах предыдущего пункта?
Пример. Найти все вещественные значения параметра $ > $, при которых матрица
Решение. Характеристический полином $ f(lambda)=-lambda^3+3, lambda-2,(3, > -1) $ имеет кратные корни только тогда когда его дискриминант $ mathcal D(f)=-324, > (3, > -2) $ обращается в нуль. При $ > =0 $ корень $ lambda=-1 $ имеет алгебраическую кратность $ 2_ $. Найдем дефект матрицы $ A+E $: $$left( begin2 &0 & -2 \ -1 &3 &1 \ 2 & 0 & -2 end right) longrightarrow left( begin1 &0 & -1 \ 0 &3 &0 \ 0 & 0 & 0 end right) Longrightarrow operatorname (A+E) =2 Longrightarrow operatorname (A+E)=1 . $$ Таким образом, геометрическая кратность собственного числа $ lambda=-1 $ равна $ 1_ $ и условие теоремы $ 5 $ не выполнено. Оно не будет выполнено и при $ > = 2/3 $ (здесь корень $ lambda=1 $ имеет кратность $ 2_ $).
Ответ. Матрица диагонализуема при всех значениях параметра, за исключением $ > = 0 $ и $ > = 2/3 $.
Диагонализуемость матрицы оператора над полем вещественных чисел
В предыдущем пункте мы рассматривали операторы, не всегда акцентируя внимания на поле, над которым они были определены — над $ mathbb R_ $ или над $ mathbb C_ $. Сама теорема существования собственного числа гарантирует нам только лишь наличие этих чисел в поле $ mathbb C_ $. Как следствие, даже если рассматриваются операторы над полем $ mathbb R_ $ (что чаще всего и случается на практике), то существование для них вещественного канонического базиса вовсе не гарантировано.
Задача. Найти условия диагонализуемости матрицы оператора $ mathcal A $ над полем вещественных чисел.
Необходимое условие следует из теоремы $ 2 $ предыдущего пункта: все собственные числа матрицы должны быть вещественными.
Теорема $ 3 $ позволяет сформулировать и достаточный критерий диагонализуемости матрицы оператора $ mathcal A $ над $ mathbb R_ $.
Теорема. Если характеристический полином оператора имеет только простые вещественные корни, то матрица оператора диагонализуема над $ mathbb R_ $.
Условие различности и вещественности корней произвольного полинома $ f(lambda)=lambda^n+a_1lambda^+dots+ a_n in mathbb R[x] $ можно проверить по коэффициентам этого полинома «чисто алгебраически», т.е. за конечное число элементарных алгебраических операций над этими коэффициентами. Воспользуемся, например, теоремой Якоби из раздела ☞ ЛОКАЛИЗАЦИЯ КОРНЕЙ ПОЛИНОМА. По коэффициентам $ a_1,dots,a_n $ можно определить сумму Ньютона полинома $ f(lambda) $, т.е. величину $$ s_k=sum_ lambda_j^k . $$ Далее, после нахождения всех этих сумм для значений $ k in $, из них составляется ганкелева матрица $$ S=left[ s_ right]_^ $$ и вычисляются ее главные миноры $ S_1,dots, S_ $. Для различности всех корней полинома необходимо и достаточно выполнение условия $ S_n ne 0 $ (этот минор совпадает с дискриминантом $ mathcal D(f) $ полинома $ f(lambda) $); для различности и вещественности всех корней необходимо и достаточно, чтобы были выполнены неравенства $$ S_1ge 0,dots,S_ ge 0,S_n > 0 . $$
Пример. Найти все вещественные значения параметра $ > $, при которых матрица
Решение. На основании теоремы нам нужно установить условия вещественности корней характеристического полинома $ f(lambda)=-lambda^3+3, lambda-2,(3, > -1) $. Вычисляем суммы Ньютона: $ s_0=3, s_1= 0, s_2=6, s_3=18, > -6, s_4=18 $, составляем матрицу: $$ S=left(begin3 & 0 & 6 \ 0 & 6 & 18, > -6 \ 6 & 18, > -6 & 18 end right) $$ и вычисляем ее главные миноры: $$S_1=3, S_2=18, S_3=-324, > , (3, > -2)=mathcal D(f) . $$ При $ > ne 0 $ и $ > ne 2/3 $ все собственные числа различны, условие теоремы выполняется при $ > in ]0,, 2/3[ $. Граничные точки последнего интервала следовало бы исследовать отдельно: хотя этим значениям параметра и соответствует случай кратных вещественных корней характеристического полинома, но матрица $ A_ $ может оказаться диагонализуемой на основании теоремы 5 предыдущего пункта. Но при решении примера в предыдущем пункте мы уже установили, что это условие не выполняется.
Ответ. Матрица диагонализуема над $ mathbb R_ $ при $ > in ]0,, 2/3[ $.
Жорданова нормальная форма
Если матрица оператора оказывается недиагонализуемой над $ mathbb C_ $, то к какому простейшему виду ее можно привести ? — Этим видом является, например, ☞ ЖОРДАНОВА НОРМАЛЬНАЯ ФОРМА.
Задачи
Источники
[1]. Гантмахер Ф.Р. Теория матриц. 4-е изд. М.Наука. 1988.
[2]. Фаддеев Д.К., Фаддеева В.Н. Вычислительные методы линейной алгебры. М.ГИФМЛ.1960
[3]. Хорн Р., Джонсон Ч. Матричный анализ. М.Мир.1989
[4]. Мишина А.П., Проскуряков И.В. Высшая алгебра. М.Наука. 1965
