Для определения максимального момента
необходимо взять первую производную
от М по S и приравнять к нулю
![]() .
.
Определим из полученного выражения
критическое скольжение – Sкрсоответствующего максимальному моменту
 ,
,
(1)
обычно
![]() ,
,
то![]() ,
,
критическое скольжение определяется
соотношением активного сопротивления
ротора к суммарному индуктивному
сопротивлению обмотки ротора и статора.
Если
подставим выражение (1) в общее уравнение
момента и сделаем необходимые
преобразования, то получим выражение
максимального момента.

Знак + -
соответствует двигательному режиму
Знак – – соответствует генераторному режиму
При генераторном режиме
![]()
И з
з
выражения Мкрвидно, что величина
максимального момента не зависит от
активного сопротивления роторной цепи,
но сильно оно влияет на его расположение.
Если сопротивление роторной цепи
увеличивать , то увеличивается Sкри кривая момента смещается вправо
![]() ,
,![]()
Как видно из кривых, чем больше активное
сопротивление в роторной цепи, тем
больше пусковой момент и меньше пусковой
ток. Это ценное свойство используется
в двигателях с фазным ротором.
2.4.3. Расчетная формула момента
Р асчетная
асчетная
формула момента показывает, что момент
асинхронного двигателя пропорционален
потоку и активной составляющей тока
ротора.
Запишем известное выражение момента

для
вывода расчетной формулы используем
нижнюю часть векторной диаграммы
асинхронного двигателя
![]() ,
,![]() ,
,![]() ,
,![]()
тогда

тогда
![]() ,
,
т.е. момент зависит от потока и активной
составляющей тока ротора.
2.4.4. Влияние высших гармоник магнитного поля на работу асинхронной машины
Высшие гармоники магнитного поля
возникают:
a) вследствие ступенчатого распределения
намагничивающей силы статора и ротора;
б) зубчатого строения поверхности
статора и ротора;
в) неравномерным насыщением магнитной
цепи машины.
Вращающие моменты, обусловленные высшими
гармониками поля, могут быть разбиты
на три группы:
1. Асинхронные
2. Синхронные
3. Вибрационные
1. Асинхронные моменты, cозданные высшими
гармониками магнитного поля.
Гармонические
магнитного поля, имеющие пространственный
период меньше 2
могут возникать в асинхронной машине
как в результате несинусоидальности
намагничивающих сил, так и вследствие
зубчатости воздушного зазора. Высшие
гармоники поля передвигаются в
направлении движения ротора и создаются
током статора. Это поле наводит в обмотке
ротора ЭДС и ток соответствующей частоты,
который создает магнитное поле,
передвигающееся по поверхности ротора,
и вращается в воздушном зазоре синхронно
с полем статора. Магнитные поля статора
и ротора будут иметь одинаковые
пространственные периоды и создадут
результирующее поле. Это поле взаимодействуя
с током в роторе создает вращающий
момент, который по его природе следует
рассматривать как асинхронный. Высшие
гармоники поля создают соответствующие
моменты, которые искажают момент от
первой гармоники поля.
Рассмотрим влияние 5 и 7 гармоники поля
на момент от первой гармоники поля
![]()
 ,
,
седьмая гармоника поля вращается в
сторону первой гармоники
![]() ,
,
пятая
гармоника поля вращается против первой
гармоники.
Асинхронные моменты, обусловленные
высшими гармониками поля могут быть
ослабленны за счет рационального
размещения зубцов в слое обмоток статора
и ротора (Z1и Z2). Обеспечение
синусоидальности намагничивающей силы
и максимального снижения зубцовых
гармоник.
2. Cинхронные моменты от высших гармоник
магнитного поля.
Не все высшие гармонические магнитного
поля, созданные статором и ротором
сцепляются с обеими обмотками и образуют
асинхронные вращающие моменты. Это
особенно характерно для зубцовых высших
гармоник. При определенных скоростях
вращения ротора отдельные гармонические
зубцового поля статора могут двигаться
синхронно с соответствующими гармоническими
зубцового поля статора. Под действием
магнитных сил в этом случае возникают
механические воздействия между статором
и ротором и создаются синхронные моменты
для какого-то одного значения скольжения.
При этом пространственный период
основной зубцовой гармоники статора и
ротора должен быть одинаков. То есть

![]() т.е. при
т.е. при![]()
синхронные моменты будут сильно
проявляться.
Синхронные моменты могут быть ослаблены
за счет скоса и правильного выбора
соотношений зубцов статора и ротора.
3. Вибрационные силы и моменты
Зубцовые и другие магнитные поля статора
ротора, образующие синхронные моменты,
проявляющиеся не только при взаимном
синхронном их вращении, но и при любых
других скоростях вращения. В этом случае
они образуют периодически меняющиеся
вращающиеся моменты, которые в течение
одного полупериода направлены в сторону
вращения ротора, а в течении другого
полупериода в обратном направлении.
Такие периодически меняющиеся моменты
могут создавать вибрации ротора и
статора, которые становятся особенно
заметными при наличии резонансных
явлений. При неблагоприятных соотношениях
зубцов статора и ротора могут возникнуть
не только тангенциальные, но так же и
радиальные магнитные силы притяжения,
действующие на статор и ротор и
перемещающиеся вдоль окружности
воздушного зазора при вращении ротора,
эти силы вызывают вибрацию машины.
Анализ этих процессов показывает, что
вибрационные силы и моменты проявляются
особенно сильно, если
![]()
![]()
2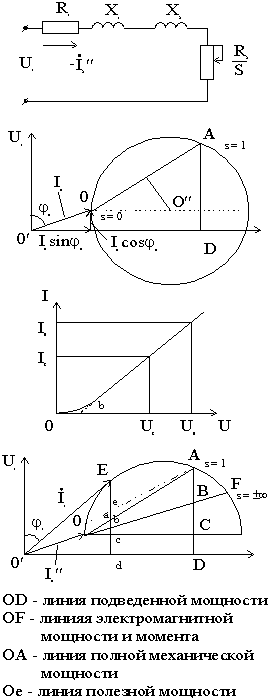 .5.
.5.
Круговая диаграмма асинхронной машины
Рабочие и другие характеристики
асинхронного двигателя, определяющие
рабочие свойства машины, могут быть
получены:
-
Путем
непосредственной нагрузки. -
Расчетным
путем (определение параметров и расчет
характеристик). -
Косвенный
метод (по данным опыта холостого хода
и короткого замыкания). Используя данные
опыта холостого хода и короткого
замыкания можно построить упрощенную
круговую диаграмму, а из нее получить
данные для построения рабочих
характеристик.
Из Г–образной схемы замещения
![]() ,
,![]()
Обозначим в рабочей ветви
![]() ,
,![]() ,
,![]() ,
,![]()
тогда
ток –

Геометрическим местом тока
![]() является окружность.
является окружность.
Построение круга диаграммы.
Из опыта холостого хода для UНнаходим
Р0 иI0,I0=
![]() ,
,
![]() ,
,![]()
и определяем
![]() ,
,![]()
а по ним строится вектор тока хх – I0,
задавшись масштабом токаmI(A/см)
Для построения точки А, где S= 1 приводим токIк,
мощность РкиCosкк номинальному напряжениюIпUн.
Из рис. 2
![]() ,
,
откуда![]()
 ,
,![]() ,
,![]()
Откладываем отрезок
![]() ,
,![]() получаем точку А. Соединив точку А с О
получаем точку А. Соединив точку А с О
получим хорду окружности. Опуская
перпендикуляр из середины хорды до
линии![]() получим центр окружности
получим центр окружности![]() .
.
Построение линии OF.
Определение точки В.
![]() ,
,![]() ,r1– известно
,r1– известно
откуда отрезок
![]() .
.
Получим точку В. Соединив точку О с В и
продлив до окружности получим точку F
где S=.
Мощность![]() ,
,
т.е.
![]() ,
,![]()
Задавшись mI,
определим масштаб мощности
![]()
Тогда мощность
![]() ,
,![]() ,
,![]()

Как
получить данные из круговой диаграммы
для построения рабочих характеристик?
P1,
I1, ,
Cos1,
S, n = f(P2)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Максимальный момент – асинхронный двигатель
Cтраница 1
Максимальный момент асинхронного двигателя не зависит от величины активного сопротивления цепи ротора.
[1]
Максимальный момент асинхронного двигателя в схеме вентильного каскада снижается на 17 %, и относительная величина его равна 0 83 / гм.
[2]
Как видно, максимальный момент асинхронного двигателя совершенно не зависит от активного сопро -, тивления цепи ротора, а зависит от активного сопротивления статора и индуктивного сопротивления обмотки статора и начальной величины индуктивного сопротивления обмотки ротора.
[3]
Как видно, максимальный момент асинхронного двигателя совершенно не зависит от активного сопротивления цепи ротора, а зависит от активного сопротивления статора и индуктивного сопротивления обмотки статора и начальной величины индуктивного сопротивления обмотки ротора.
[4]
Как известно, при понижении напряжения до 70 % максимальный момент асинхронных двигателей уменьшается приблизительно в ДЕЗ раза, что может привести к торможению или к полной их остановке. Поэтому быстрота действия защиты должна определяться в зависимости от остаточного напряжения на шинах ТЭЦ при коротких замыканиях.
[5]
Из анализа выражений (8.47) и (8.48) следует, что величина максимального момента асинхронного двигателя Мтах не зависит от активного сопротивления ро.
[7]
Усилие тяги по пределу устойчивости должно превышать Fmax, при этом необходимо иметь в виду, что максимальный момент асинхронного двигателя пропорционален квадрату напряжения.
[9]
Механические характеристики приведены для различных токов статора / п, который может регулироваться реостатом с сопротивлением Rp, и добавочных резисторов ротора R 2д: характеристики 2 и 4 соответствуют току / п, а характеристика 3 – току / пт / п1; характеристики 2 и 3 соответствуют резистору 2д1 а характеристика 4 – резистору Л2д2 Я2д1 – Как ВИДНО увеличение тока / п и сопротивления добавочного резистора Л2д приводит к увеличению соответственно максимального момента асинхронного двигателя Мы и к росту скольжения SM, при котором имеет место этот момент.
[11]
Максимальный момент асинхронного двигателя Л1тах прямо пропорционален квадрату напряжения, приложенному к обмотке статора, и приблизительно обратно пропорционален квадрату частоты сети.
[12]
МКО может быть назван идеальным максимальным моментом, так как в реальных условиях такого момента двигатель не развивает. Значение идеального максимального момента, как видно из сопоставления формул ( 6 – 14) и ( 6 – 17), меньше максимального момента асинхронного двигателя в обычной схеме включения примерно на 4 5 % из-за дополнительного падения напряжения в цепи выпрямленного тока.
[13]
В свою очередь электромагнитная мощность второго двигателя 2Д аналогично предыдущему распределяется на две части: мощность, которая передается на вал каскада, и мощность скольжения, которая реализуется машиной постоянного тока. При последовательном соединении двух двигателей ток короткого замыкания оказывается значительно меньше, чем в случае одного, а ток холостого хода первого двигателя возрастает по сравнению с параллельным соединением, так как реактивная мощность, потребляемая из сети первым двигателем, идет на намагничивание обеих машин. Поэтому максимальный момент асинхронных двигателей значительно снижается при последовательном соединении. Однако он может оказаться достаточным при вентиляторной нагрузке. Регулирование скорости каскада производится следующим образом: вначале при параллельном соединении двигателей 1Д и 2Д и параллельном соединении 1МП и 2МП увеличением тока возбуждения этих машин снижается скорость каскада до значения, приблизительно равного 0 75со0; затем производится переключение якорных цепей машин постоянного тока с параллельного на последовательное. При этом ток возбуждения одной машины, например 1МП, оказывается наибольшим, обмотка возбуждения второй машины 2МП отключается, и ток возбуждения ее равен нулю.
[14]
Различают два основных типа асинхронных двигателей: с ко-роткозамкнутым ротором и с фазовым ротором. Двигатели с короткозамкнутым ротором не имеют подвода и отвода тока от ротора; двигатели с фазовым ротором имеют кольца, к которым подсоединяют пусковое или регулирующее сопротивление, обеспечивающее более плавный пуск. Помимо этого сопротивление снижает статорный ток при низких скоростях вращения, поэтому при нагрузке можно в некоторой степени регулировать скорость вращения асинхронного двигателя. Зависимость максимального момента асинхронного двигателя от напряжения на контактах значительно больше, чем у синхронного, поскольку максимальный момент асинхронного двигателя изменяется пропорционально квадрату напряжения, а у синхронного – пропорционально первой степени напряжения.
[15]
Страницы:
1
2
Таблица крутящих моментов электродвигателей
В данной таблице собраны крутящие моменты наиболее распространенных в Украине электродвигателей АИР, а также требуемый при пуске – пусковой, максимально допустимый для данного типа электродвигателя – максимальный крутящий момент и момент инерции двигателей АИР (усилие важное при подборе электромагнитного тормоза, например)
| Двигатель | кВт/об | Мном, Нм | Мпуск, Нм | Ммакс, Нм | Минн, Нм |
| АИР56А2 | 0,18/2730 | 0,630 | 1,385 | 1,385 | 1,133 |
| АИР56В2 | 0,25/2700 | 0,884 | 1,945 | 1,945 | 1,592 |
| АИР56А4 | 0,12/1350 | 0,849 | 1,868 | 1,868 | 1,528 |
| АИР56В4 | 0,18/1350 | 1,273 | 2,801 | 2,801 | 2,292 |
| АИР63А2 | 0,37/2730 | 1,294 | 2,848 | 2,848 | 2,330 |
| АИР63В2 | 0,55/2730 | 1,924 | 4,233 | 4,233 | 3,463 |
| АИР63А4 | 0,25/1320 | 1,809 | 3,979 | 3,979 | 3,256 |
| АИР63В4 | 0,37/1320 | 2,677 | 5,889 | 5,889 | 4,818 |
| АИР63А6 | 0,18/860 | 1,999 | 4,397 | 4,397 | 3,198 |
| АИР63В6 | 0,25/860 | 2,776 | 6,108 | 6,108 | 4,442 |
| АИР71А2 | 0,75/2820 | 2,540 | 6,604 | 6,858 | 4,064 |
| АИР71В2 | 1,1/2800 | 3,752 | 8,254 | 9,004 | 6,003 |
| АИР71А4 | 0,55/1360 | 3,862 | 8,883 | 9,269 | 6,952 |
| АИР71В4 | 0,75/1350 | 5,306 | 13,264 | 13,794 | 12,733 |
| АИР71А6 | 0,37/900 | 3,926 | 8,245 | 8,637 | 6,282 |
| АИР71В6 | 0,55/920 | 5,709 | 10,848 | 12,560 | 9,135 |
| АИР71В8 | 0,25/680 | 3,511 | 5,618 | 6,671 | 4,915 |
| АИР80А2 | 1,5/2880 | 4,974 | 10,943 | 12,932 | 8,953 |
| АИР80В2 | 2,2/2860 | 7,346 | 15,427 | 19,100 | 13,223 |
| АИР80А4 | 1,1/1420 | 7,398 | 16,275 | 17,755 | 12,576 |
| АИР80В4 | 1,5/1410 | 10,160 | 22,351 | 24,383 | 17,271 |
| АИР80А6 | 0,75/920 | 7,785 | 16,349 | 17,128 | 12,457 |
| АИР80В6 | 1,1/920 | 11,418 | 25,121 | 26,263 | 20,553 |
| АИР80А8 | 0,37/680 | 5,196 | 10,393 | 11,952 | 7,275 |
| АИР80В8 | 0,55/680 | 7,724 | 15,449 | 16,221 | 10,814 |
| АИР90L2 | 3/2860 | 10,017 | 23,040 | 26,045 | 17,030 |
| АИР90L4 | 2,2/1430 | 14,692 | 29,385 | 35,262 | 29,385 |
| АИР90L6 | 1,5/940 | 15,239 | 30,479 | 35,051 | 28,955 |
| АИР90LА8 | 0,75/700 | 10,232 | 15,348 | 20,464 | 15,348 |
| АИР90LВ8 | 1,1/710 | 14,796 | 22,194 | 32,551 | 22,194 |
| АИР100S2 | 4/2850 | 13,404 | 26,807 | 32,168 | 21,446 |
| АИР100L2 | 5,5/2850 | 18,430 | 38,703 | 44,232 | 29,488 |
| АИР100S4 | 3/1410 | 20,319 | 40,638 | 44,702 | 32,511 |
| АИР100L4 | 4/1410 | 27,092 | 56,894 | 65,021 | 43,348 |
| АИР100L6 | 2,2/940 | 22,351 | 42,467 | 49,172 | 35,762 |
| АИР100L8 | 1,5/710 | 20,176 | 32,282 | 40,352 | 30,264 |
| АИР112М2 | 7,5/2900 | 24,698 | 49,397 | 54,336 | 39,517 |
| АИР112М4 | 5,5/1430 | 36,731 | 73,462 | 91,827 | 58,769 |
| АИР112МА6 | 3/950 | 30,158 | 60,316 | 66,347 | 48,253 |
| АИР112МВ6 | 4/950 | 40,211 | 80,421 | 88,463 | 64,337 |
| АИР112МА8 | 2,2/700 | 30,014 | 54,026 | 66,031 | 42,020 |
| АИР112МВ8 | 3/700 | 40,929 | 73,671 | 90,043 | 57,300 |
| АИР132М2 | 11/2910 | 36,100 | 57,759 | 79,419 | 43,320 |
| АИР132S4 | 7,5/1440 | 49,740 | 99,479 | 124,349 | 79,583 |
| АИР132М4 | 11/1450 | 72,448 | 173,876 | 210,100 | 159,386 |
| АИР132S6 | 5,5/960 | 54,714 | 109,427 | 120,370 | 87,542 |
| АИР132М6 | 7,5/950 | 75,395 | 150,789 | 165,868 | 120,632 |
| АИР132S8 | 4/700 | 54,571 | 98,229 | 120,057 | 76,400 |
| АИР132М8 | 5,5/700 | 75,036 | 135,064 | 165,079 | 105,050 |
| АИР160S2 | 15/2940 | 48,724 | 97,449 | 155,918 | 2,046 |
| АИР160М2 | 18,5/2940 | 60,094 | 120,187 | 192,299 | 2,884 |
| АИР180S2 | 22/2940 | 71,463 | 150,071 | 250,119 | 4,288 |
| АИР180М2 | 30/2940 | 97,449 | 214,388 | 341,071 | 6,821 |
| АИР200М2 | 37/2950 | 119,780 | 275,493 | 383,295 | 16,769 |
| АИР200L2 | 45/2940 | 146,173 | 380,051 | 584,694 | 19,003 |
| АИР225М2 | 55/2955 | 177,750 | 408,824 | 710,998 | 35,550 |
| АИР250S2 | 75/2965 | 241,568 | 628,078 | 966,273 | 84,549 |
| АИР250М2 | 90/2960 | 290,372 | 784,003 | 1161,486 | 116,149 |
| АИР280S2 | 110/2960 | 354,899 | 887,247 | 1171,166 | 212,939 |
| АИР280М2 | 132/2964 | 425,304 | 1233,381 | 1488,563 | 297,713 |
| АИР315S2 | 160/2977 | 513,268 | 1231,844 | 1693,786 | 590,259 |
| АИР315М2 | 200/2978 | 641,370 | 1603,425 | 2116,521 | 962,055 |
| АИР355SMA2 | 250/2980 | 801,174 | 1281,879 | 2403,523 | 2163,171 |
| АИР160S4 | 15/1460 | 98,116 | 186,421 | 284,538 | 7,457 |
| АИР160М4 | 18,5/1460 | 121,010 | 229,920 | 350,930 | 11,375 |
| АИР180S4 | 22/1460 | 143,904 | 302,199 | 402,932 | 15,110 |
| АИР180М2 | 30/1460 | 196,233 | 470,959 | 588,699 | 27,276 |
| АИР200М4 | 37/1460 | 242,021 | 532,445 | 847,072 | 46,952 |
| АИР200L4 | 45/1460 | 294,349 | 647,568 | 941,918 | 66,229 |
| АИР225М4 | 55/1475 | 356,102 | 997,085 | 1317,576 | 145,289 |
| АИР250S4 | 75/1470 | 487,245 | 1218,112 | 1559,184 | 301,605 |
| АИР250М4 | 90/1470 | 584,694 | 1461,735 | 1871,020 | 467,755 |
| АИР280S4 | 110/1470 | 714,626 | 2072,415 | 2429,728 | 578,847 |
| АИР280М4 | 132/1485 | 848,889 | 1697,778 | 2886,222 | 1612,889 |
| АИР315S4 | 160/1487 | 1027,572 | 2568,931 | 3802,017 | 2363,416 |
| АИР315М4 | 200/1484 | 1287,062 | 3217,655 | 4247,305 | 3603,774 |
| АИР355SMA4 | 250/1488 | 1604,503 | 3690,356 | 4492,608 | 8985,215 |
| АИР355SMВ4 | 315/1488 | 2021,673 | 5054,183 | 5862,853 | 12534,375 |
| АИР355SMС4 | 355/1488 | 2278,394 | 5012,466 | 6151,663 | 15493,078 |
| АИР160S6 | 11/970 | 108,299 | 205,768 | 314,067 | 12,021 |
| АИР160М6 | 15/970 | 147,680 | 339,665 | 443,041 | 20,675 |
| АИР180М6 | 18,5/970 | 182,139 | 400,706 | 546,418 | 29,324 |
| АИР200М6 | 22/975 | 215,487 | 517,169 | 711,108 | 50,209 |
| АИР200L6 | 30/975 | 293,846 | 617,077 | 881,538 | 102,846 |
| АИР225М6 | 37/980 | 360,561 | 721,122 | 1081,684 | 186,050 |
| АИР250S6 | 45/986 | 435,852 | 784,533 | 1307,556 | 440,210 |
| АИР250М6 | 55/986 | 532,708 | 1012,145 | 1811,207 | 633,922 |
| АИР280S6 | 75/985 | 727,157 | 1454,315 | 2326,904 | 1090,736 |
| АИР280М6 | 90/985 | 872,589 | 1745,178 | 2792,284 | 1657,919 |
| АИР315S6 | 110/987 | 1064,336 | 1809,372 | 2873,708 | 4044,478 |
| АИР315М6 | 132/989 | 1274,621 | 2166,855 | 3696,400 | 5735,794 |
| АИР355МА6 | 160/993 | 1538,771 | 2923,666 | 3539,174 | 11848,540 |
| АИР355МВ6 | 200/993 | 1923,464 | 3654,582 | 4423,968 | 17118,832 |
| АИР355MLA6 | 250/993 | 2404,330 | 4568,228 | 5529,960 | 25485,901 |
| AИР355MLB6 | 315/992 | 3032,510 | 6065,020 | 7278,024 | 40029,133 |
| АИР160S8 | 7,5/730 | 98,116 | 156,986 | 235,479 | 13,246 |
| АИР160М8 | 11/730 | 1007,329 | 1712,459 | 2417,589 | 181,319 |
| АИР180М8 | 15/730 | 196,233 | 333,596 | 529,829 | 41,994 |
| АИР200М8 | 18,5/728 | 242,685 | 509,639 | 606,714 | 67,952 |
| АИР200L8 | 22/725 | 289,793 | 579,586 | 724,483 | 88,966 |
| АИР225М8 | 30/735 | 389,796 | 701,633 | 1052,449 | 214,388 |
| АИР250S8 | 37/738 | 478,794 | 861,829 | 1196,985 | 481,188 |
| АИР250М8 | 45/735 | 584,694 | 1052,449 | 1520,204 | 695,786 |
| АИР280S8 | 55/735 | 714,626 | 1357,789 | 2143,878 | 1071,939 |
| АИР280М8 | 75/735 | 974,490 | 1754,082 | 2728,571 | 1851,531 |
| АИР315S8 | 90/740 | 1161,486 | 1509,932 | 2671,419 | 4413,649 |
| АИР315М8 | 110/742 | 1415,768 | 2265,229 | 3964,151 | 6370,957 |
| АИР355SMA8 | 132/743 | 1696,635 | 2714,616 | 3902,261 | 12215,774 |
| AИР355SMB8 | 160/743 | 2056,528 | 3496,097 | 4935,666 | 18097,443 |
| AИР355MLA8 | 200/743 | 2570,659 | 4627,187 | 6940,781 | 26991,925 |
| AИР355MLB8 | 250/743 | 4498,654 | 7647,712 | 10796,770 | 58032,638 |
Основные параметры электродвигателя
- Мощность электродвигателя
- Номинальная частота вращения
- Коэффициент полезного действия
- Момент электродвигателя
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
- где P
– мощность,
Вт
, - A
– работа,
Дж
, - t
— время,
с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F
и пути
s
, проходимого точкой приложения силы.
- где s
– расстояние,
м
Для вращательного движения
- где θ – угол, рад
- где ω – углавая частота, рад/с
,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Частота вращения
- где n
— частота вращения электродвигателя,
об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
- где J
– момент инерции,
кг∙м2
, - m
— масса,
кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2) 1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
- где ε – угловое ускорение, с-2
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
- где η – коэффициент полезного действия электродвигателя,
- P1
— подведенная мощность (электрическая),
Вт
, - P2
— полезная мощность (механическая),
Вт
- При этом
потери в электродвигатели
- обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики.
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
- где – постоянная времени, с
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
- где M
– вращающий момент,
Нм
; - F
– сила,
Н
; - r
– радиус-вектор,
м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
- где Pном
– номинальная мощность двигателя,
Вт
, - nном
— номинальная частота вращения,
мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force) 1 oz = 1/16 lb = 0,2780139 N (Н) 1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм) 1 lb∙in = 0,112985 Nm (Нм)
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Характеристика двигателя — “момент-скорость”
Главная задача стоящая перед конструктором при проектировании привода — обеспечить необходимый момент в заданном диапазоне скоростей. Успешное решение этой задачи зависит от правильного выбора двигателя и передаточного отношения механической передачи.
При выборе двигателя в первую очередь нужно исходить из характеристики “момент-частота вращения”. Момент, мощность и скорость связаны соотношением:
Мощность [кВт] = Момент [Нм] * скорость [об/мин] / 9550
Момент [Нм] = 9550 * Мощность [кВт] / скорость [об/мин]
Синхронный двигатель
Характеристику синхронного двигателя можно разделить на две области:
- от нуля до номинальной скорости nN (диапазон постоянного момента). В этом диапазоне двигатель может обеспечить номинальный момент MN в независимости от скорости. Это предпочтительный диапазон работы. При выборе двигателя и передаточного отношения механизма нужно стремиться к тому, чтобы рабочие режимы лежали в этой области.
Постоянство момента здесь условное — на самом деле по мере снижения оборотов допустимый момент возрастает (до 20-30%). Поэтому для синхронных двигателей также указывается момент удержания при нулевой скорости M
0
(static torque, stall torque)
- от номинальной скорости nN до максимальной скорости nmax (диапазон постоянной мощности). В этом диапазоне момент двигателя падает с увеличением скорости. Точная характеристика в этой области зависит от функциональности привода (режим ослабления магнитного поля — field weakening)
Характеристика двигателя привязана к температуре. У современных синхронных двигателей переменного тока с постоянными магнитами (PMSM) номинальная температура обычно достаточно высокая — около 70°С. Это значит, что если двигатель нагружен номинальным моментом 100% времени (режим S1-100%), то он нагреется до номинальной температуры.
В случае станков, такой нагрев даже до номинальной температуры может быть недопустим с точки зрения точности (особенно для шпиндельных узлов), и тогда двигатель следует выбирать с таким запасом, который обеспечит нужный температурный режим.
Макс. допустимая температура двигателя может быть выше — до 90-100°С. При такой температуре его можно нагрузить бОльшим моментом — характеристика на графике сместиться вверх.
Если характер нагрузки не 100%-ный, т.е. нагрузка прикладывается с перерывами, то двигатель можно нагрузить ещё больше и при этом он не будет перегреваться. Поэтому характеристика для режимов непостоянного нагружения (S3-25%,40%,60%) может быть выше (стандартные режимы нагружения см. в ГОСТ Р 52776-2007 (IEC/МЭК 60034-1). При этом момент всё равно будет ограничен механикой (подшипниками и прочностью вала двигателя) и макс. допустимым током и напряжением электрической части.
Асинхронный двигатель с частотным преобразователем.
С точки зрения электрической части частотный преобразователь может обеспечить работу асинхронного двигателя с постоянным моментом. Но при этом нужно учитывать условия охлаждения: при уменьшении скорости эффективность вентилятора снижается, поэтому характеристика “момент-обороты” при постоянной температуре становится сложнее:
- при минимальных оборотах допустимый постоянный момент M0 составляет около 40-60% от номинального момента, так как вентилятор не обдувает двигатель. В этом диапазоне характеристика также может сильно зависеть от типа управления (U/f, векторное, буст);
- при повышении оборотов до 0.5-0.6*nN эффективность вентилятора повышается, следовательно вырастает и допустимый момент.
- в диапазоне 0.6…1*nN двигатель может быть нагружен номинальным моментом MN. Это предпочтительный диапазон. При выборе двигателя и передаточного отношения механизма нужно стремиться к тому, чтобы рабочие режимы лежали в этой области
- выше номинальной скорости nN (диапазон постоянной мощности) момент падает. Точная характеристика здесь тоже будет зависит от типа управления.
Нужно учитывать, что если привод будет работать в достаточно широком диапазоне скоростей, то может потребоваться принудительное охлаждения двигателя или выбор двигателя бОльшей мощности.
ГОСТ Р МЭК/ТС09 Машины электрические вращающиеся. Часть 17. Руководство по применению асинхронных двигателей с короткозамкнутым ротором при питании от преобразователей
Шаговый двигатель
Характеристика шагового двигателя зависит от скорости гораздо сильнее чем у других типов двигателей и определяется сочетанием двигателя, привода и настроек. В каталогах обычно указывается момент при нулевой скорости. Диапазон регулирования с постоянным моментом у шагового обычно не очень большой — около 10-20% от максимальной скорости. Далее, с увеличением скорости момент падает.
Кроме этого у шагового двигателя нужно различать две характеристики: максимальная (обычно эта и указывается в каталоге) и пусковая:
- Кривая пускового момента (Pull in torque) ограничивает область нагрузок (например, трение или вес узла)и скоростей которые могут быть достигнуты мгновенно без пропуска шагов. Эта характеристика ограничивает нагрузку, если управление не предусматривает управление ускорением/торможением или если требуется макс. быстрая реакция двигателя на приложенную внешнюю нагрузку. Если момент инерции на валу двигателя увеличить, то допустимый пусковой момент уменьшается
- Кривая максимального момента (Pull out torque) ограничивает область нагрузок и скоростей которые могут быть достигнуты без пропуска шагов только при плавном увеличении частоты (скорости). Эта кривая ограничивает нагрузку, которая может быть приложена к вращающемуся двигателю без пропуска шагов. Если нагрузка превышает это ограничение, двигатель начинает пропускать шаги
Изменено 21 марта, 2014 пользователем tmpr
максимальный момент (Мmах) асинхронной машины, запишите эту формулу?
Что такое расчетная формула момента? Запишите выражение этой формулы и поясните физический смысл еѐ. Что такое
максимальный момент (Мmах) асинхронной машины, запишите эту формулу?
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М
пропорционален электромагнитной мощности:
двигателя пропорционален мощности электрических потерь в обмотке ротора.
Если значение тока ротора по выражению (3.28) подставить в (3.41), то получим формулу электромагнитного момента асинхронной машины (Н∙м):
Рассмотрим зависимость момента от скольжения М=f(s)
при
U1
= const,
f1
=const и постоянных параметрах схемы замещения. Эту зависимость принято называть механической характеристикой асинхронной машины. Анализ выражения (3.42), представляющего собой аналитическое выражение механической характеристики
М=f(s)
, показывает, что при значениях скольжения
s
=0 и
s
=¥ электромагнитный момент
М
=0. Из этого следует, что механическая характеристика
М=f(s)
имеет максимум. Для определения величины критического скольжения
sкр
, соответствующего максимальному моменту, необходимо взять первую производную от (3.42) и приравнять ее нулю:
. В результате (3.43) Подставив значение критического скольжения (по 3.43) в выражение электромагнитного момента (3.42), после ряда преобразований получим выражение максимального момента (Н∙м):
В (3.43) и (3.44) знак плюс соответствует двигательному, а знак минус — генераторному режиму работы асинхронной машины.
Для асинхронных машин общего назначения активное сопротивление обмотки статора r1
намного меньше суммы индуктивных сопротивлений:
r1
Расчетная формула момента показывает, что момент асинхронного двигателя пропорционален потоку и активной составляющей тока ротора.
Запишем известное выражение момента для вывода расчетной формулы используем нижнюю
часть векторной диаграммы асинхронного двигателя
тогда
,
т.е. момент зависит от потока и активной составляющей тока ротора.
Дата добавления: 2016-05-05 ; ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Главная / Техническая информация / Механические характеристики асинхронного двигателя
Механические характеристики асинхронного двигателя – зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу).
Электромагнитный момент М, развиваемый асинхронным двигателем, можно определять двумя способами: через электромагнитную мощность Рэм и через полную механическую мощность двигателя Р2:
М=Р2‘/ω, (39)
где Р2 —полная механическая мощность, Вт; ω=2πn/60 — механическая угловая скорость вращения ротора, 1/с; n — частота вращения ротора, об/мин.
Скорость ω связана с синхронной ω1 соотношением

Подставляя выражение для ω и Р2‘ по уравнению (36) в уравнение (39), получаем
 (40)
(40)
Выражение для момента через электромагнитную мощность имеет вид
М=Рэм/ω1,
Значение Рэм находится по уравнению (35), после чего представляем
Таким образом мы получим тождественное выражение для момента. Поскольку независимой величиной является не ток, а приложенное напряжение, то для получения окончательного выражения момента подставим в (40) значение тока I2‘ по уравнению (32):
 (41)
(41)
где М — момент, Н∙м; ω1 — синхронная скорость, с-1; U1 — напряжение, В; r1, r2‘, x1, x2‘ —сопротивления, Ом; s — скольжение, отн. ед.
Если необходимо иметь значение момента во внесистемных единицах — в килограммах силы-метрах, то полученный по (41) результат следует разделить на 9,81.
При эксплуатации часто необходимо определять момент по известной механической мощности Р2 (кВт) и частоте вращения n (об/мин). В этом случае формула (39) имеет вид, Н/м,
 (42)
(42)
Отсюда мощность Р2 связана с моментом и частотой вращения соотношением
 (43)
(43)
где М — момент, Н∙м; n — частота вращения, об/мин.
Если момент выражен в килограммах силы-метрах, то формулы (42), (43) преобразуются к виду

Зависимость между моментом и скольжением (41) при постоянном напряжении U1 и частоте f1 сети называется механической характеристикой. Естественная механическая характеристика асинхронного двигателя приведена на рис. 20. Там же приведена механическая характеристика M=f (n), часто встречающаяся на практике и полученная из характеристики M = φ(s) пересчетом (s=0 соответствует синхронной частоте вращения n1, s =1-n=0 и т. д.).
Рис. 20. Естественная механическая характеристика асинхронного двигателя: a —M=f(s); б – n =f(М); А—генераторный режим; Б — режим двигателя; В — режим электромагнитного тормоза
Используя формулу (41), можно получить достаточно полное представление о механических характеристиках асинхронного двигателя. Обратим прежде всего внимание на то, что механический момент двигателя зависит от трех групп величин: во-первых, это величины, определяемые конструкцией двигателя, к их числу относятся r1 и r’2, x1, х’2; во-вторых, величины, характеризующие напряжение, подводимое к двигателю, — напряжение на его зажимах U и частота питающего напряжения f (так как ω1 = 2πf); наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Рассмотрим физические явления, обусловливающие такую форму механической характеристики. При частоте вращения ротора, равной синхронной, проводники ротора движутся с той же скоростью, что и вращающееся магнитное поле. Поэтому ЭДС, а следовательно, и ток в роторе равны нулю. Поэтому равен нулю и вращающий момент двигателя. При уменьшении частоты вращения ротора ниже синхронной проводники обмотки ротора начинают пересекать магнитное поле машины, в результате чего в обмотке ротора наводится ЭДС, пропорциональная скольжению ротора [см. формулу (14)]. При малых скольжениях (в пределах от s=0 до s=sкр) ток ротора также изменяется почти пропорционально скольжению. К такому выводу можно прийти, рассматривая уравнение (25) или (32). Так, в уравнении (25) при малых значениях s можно пренебречь составляющей sx2 в знаменателе по сравнению со значением r2, а в (32) можно пренебречь всеми составляющими в знаменателе по сравнению со значением r’2/s.
Таким образом, ток ротора в этом диапазоне скольжений практически определяется величиной ЭДС ротора, деленной на постоянное активное сопротивление r2 [уравнение (25)].
Как видно из рис. 20, механическая характеристика в зоне малых скольжений s<sкр линейна. В этой же области скольжений находится и номинальное скольжение sном=0,01—0,1 (большие значения номинального скольжения относятся к двигателям мощностью до 1 кВт).
По мере увеличения скольжения увеличивается частота токов в роторе и возрастает влияние на характеристику индуктивного сопротивления ротора. Изменение тока, определяемое в зоне малых скольжений в основном активным сопротивлением [см. формулу (25)], замедляется, и при некотором скольжении, называемом критическим sкр, достигается максимальное значение момента. При дальнейшем увеличении скольжения (уменьшении частоты вращения ротора) момент будет уменьшаться.
Критическое скольжение находится по формуле
 (44)
(44)
где знак плюс соответствует двигательному режиму работы, а минус — генераторному (как следует из рис. 20, генераторный режим соответствует области отрицательных скольжений).
Поскольку для двигателей мощностью более 1 кВт практически всегда r1<<(х1 + х’2), то формулу для критического скольжения можно упростить:
 (44а)
(44а)
Теперь, подставляя значение s=sкр в формулу (41), получим выражение для максимального момента
 (45)
(45)
Взяв теперь отношение текущего значения момента к максимальному М/Мmax при условии r1≈0, получим
 (46)
(46)
Формула (46) оказывается весьма удобной, так как позволяет построить механическую характеристику двигателя M=f(s) при известных значениях максимального момента и соответствующего ему критического скольжения. Задавая текущее значение скольжения в диапазоне 0<s≤1, решают уравнение (46) относительно текущего момента М. Можно поступить иначе — строить механическую характеристику в относительных единицах, т. е. получать характеристику M/Mmax=f (s).
Относительный максимальный момент определяет его перегрузочную способность, т. е. способность двигателя кратковременно выдерживать нагрузки, большие номинальной. В электрических машинах перегрузочная способность обозначает kм и определяется как
kм = Mmax/Mном (47)
Важное значение имеет пусковой момент, который можно рассчитывать по общей формуле (41) при подстановке в нее s= 1:
 (48)
(48)
Относительное значение пускового момента kп определяет способность двигателя разгоняться до рабочей частоты вращения с полной нагрузкой на валу и определяется как
kп = Mп/Mном
В ряде случаев вместо (46) удобнее пользоваться формулой, в которой текущий момент двигателя отнесен не к максимальному, а к номинальному моменту. В этом случае
 (49)
(49)
где sкр, sном — значения критического и номинального скольжения двигателя; ρ=r1/r’2 (для двигателей серии 4А с высотой оси вращения 56—132 мм пользуются значением ρ≈1,32).
Если пренебречь величиной r1 (т. е. положить ρ=0), то из (49) следует
 (50)
(50)
Анализ выражения (41) для электромагнитного момента показывает, чт момент зависит от квадрата напряжения сети, что является недостатком асинхронных двигателей. Так, при снижении напряжения на 10 % момент уменьшается на 19%, а при снижении напряжения на 20 % уменьшение момента составляет 36%. На рис. 21 изображены механические характеристики двигателя при номинальном питающем напряжении (естественная характеристика) и при пониженном напряжении.
При уменьшении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит снижение частоты вращения двигателя. Частота снижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления Мс, обусловленному (приводом (соответствующие частоты вращения показаны точками на механических характеристиках рис. 21). При сильном уменьшении напряжения может случиться, что максимальный момент окажется меньше момента сопротивления Мс. В этом случае двигатель опрокидывается, т. е. его частота вращения уменьшается и в конце концов он останавливается. При заторможенном роторе по обмоткам двигателя протекают большие токи, и во избежание аварии сам двигатель должен быть отключен от сети (эти функции выполняет тепловая защита).
Рис. 21. Механические характеристики асинхронного двигателя при различных значениях питающего напряжения
