Содержание
- Масса подвижной системы
- Параметры Тиля — Смолла (Fs, Qts, Vas)
- Тиль и Смолл
- Параметры (Fs, Qts, Vas)
- Fs — резонансная частота динамика
- Qts — полная добротность
- Vas — эквивалентный объем
- Видео
- Параметры Тиля — Смолла: что скрыто за картами. Журнал «Автозвук»
Масса подвижной системы
Акустические системы с большим количеством динамиков
При подключении нескольких динамиков (акустических систем) параллельно или последовательно возрастает уровень громкости а так же растет и мощность. Применяется, для систем озвучивания и в связи с неодинаковыми характеристиками широкополосных динамиков, качество звучания остается низким. Часто способ используется в акустических системах, где применяется 2 или более низкочастотных динамиков на один высокочастотный. В этом случае основная проблема – особенности характеристики направленности такой системы
Повышение чувствительности систем с одним динамиком
Динамик, акустическая система является электро-акустическим преобразователем и как следствие, есть возможность повышать КПД системы на каждом из этапов этого преобразования.
Коэффициент электро-механической связи (BL) динамика
Первый этап – электро-механическое преобразование. Для этого введен коэффициент «BL”. Он зависит от «B”- индукции в зазоре и «L” – длинны проводников в этом зазоре (или то количество проводников, на которых действует магнитное поле). «B” можно увеличивать повышая объем и силу магнитов, уменьшая магнитный зазор как по высоте, так и по ширине. «L” – увеличивая диаметр катушки и кол-во витков по высоте в зазоре. Если увеличивать значение «BL”, без изменения прочих характеристик динамика то будет расти чувствительность в области выше основного резонанса динамика, а низкочастотные возможности останутся без изменений.
Масса подвижной системы
При уменьшении массы подвижной системы мы можем создавать давление больше, чем с большей массой. Это улучшает в импульсные и переходных характеристики, но понижает прочность (мощность), жесткость (могут повышаться нелинейные искажения) и потребует применения новых материалов и технологий что бы избавиться от этих искажений. Получение низких частот, особенно глубоких требует больших усилий.
Источник
Параметры Тиля — Смолла (Fs, Qts, Vas)
Тиль и Смолл
Тиль и Смолл это два ученых, которые сформировали единый, общепринятый подход к вычислению характеристик низкочастотных динамиков на основе основных параметров (Fs, Qts, Vas).
 Невил Тиль/A. Neville Thiele (слева), Ричард (Рихард) Смолл/Richard Small (справа)
Невил Тиль/A. Neville Thiele (слева), Ричард (Рихард) Смолл/Richard Small (справа)
Параметры Тиля — Смолла определяют поведение динамика в диапазоне низких частот
Для нас с вами эти параметры очень важны, так как они используются для расчета правильного акустического оформления динамика или проще — для расчета корпуса сабвуфера. Все необходимые данные вы можете найти в технической документации на саб, часто они указываются и на коробках. Ниже мы подробнее рассмотрим основные параметры для понимания звуковых процессов и нюансов при выборе сабвуфера.
Параметры (Fs, Qts, Vas)
Fs — резонансная частота динамика
Резонансная частота (Fs) — частота резонанса сабвуфера без акустического оформления (без корпуса).
Fs меньше 25 Гц считается низкой, а больше 40 Гц — высокой. Резонансная частота зависит от общей жесткости подвеса сабвуфера и массы его подвижной системы. Общая жесткость, в свою очередь, зависит от жесткости центрирующей шайбы и жесткости подвеса диффузора.
Сms — гибкость подвеса подвижной системы динамика, м/Н,
Mms — масса подвижной системы (включая массу двигаемого воздуха), кг.
Qts — полная добротность
Полная добротность (Qts) — это упругость (контроль) динамика в районе резонансной частоты (Fs).
Другими словами — чем выше добротность, тем сильнее «болтается» саб в районе своей резонансной частоты (Fs), а чем ниже, тем эффективнее колебания гасятся (контролируются).
Складывается из механической добротности, которая зависит в основном от материала центрирующей шайбы, а не подвеса диффузора, как многие думают и электрической добротности, зависящей от величины магнита, длины обмотки катушки и ширины зазора в магнитной системе. От полной добротности механическая составляет 10-15%, а электрическая 90-85%, соответственно.
Низкой добротностью считается значение 0.3-0.35, высокой — 0.5-0.6.
,
- Qms — механическая добротность на частоте Fs,
,
Fs — резонансная частота динамика, Гц,
Mms — масса подвижной системы (включая массу двигаемого воздуха), кг,
Rms — механическое сопротивление подвеса подвижной системы (определяет «потери» в подвесе), Н·с/м,
- Qes — электрическая добротность на частоте Fs,
,
Mms — масса подвижной системы (включая массу двигаемого воздуха), кг,
Fs — резонансная частота динамика, Гц,
Re — сопротивление звуковой катушки, Ом,
Bl — коэффициент электромеханической связи (индукция поля в магнитном зазоре умноженная на длину провода звуковой катушки), Тл·м.
Vas — эквивалентный объем
Эквивалентный объем (Vas) — объем воздуха в корпусе, обладающий той же упругостью, что и сабвуфер. Зависит от жесткости подвеса и площади диффузора (диаметра) динамика.
Чем больше диаметр и мягче сабвуфер, тем больше Vas.
Нужно отметить особенность связи Vas и Fs. Так как, резонансная частота (Fs) определяется жесткостью подвеса и массой подвижной системы, а эквивалентный объем (Vas) — диаметром диффузора и той же массой подвижки, может получится, что два сабвуфера одного диаметра и с одинаковой Fs будут совершенно разными — один тяжелый и жесткий, другой легкий и мягкий. Соответственно, эквивалентный объем для этих динамиков будет совершенно разным, как и размер правильного корпуса — вот почему данный параметр очень важен при расчетах короба для саба.
Vas — эквивалентный объем, л,
,
- ρ— 1,18421 кг/м³ — плотность воздуха при температуре 25 °C и влажности 0 %,
- с— 346,1 м/с — скорость звука при 25 °C,
- Sd— площадь диффузора, м.
Видео
Читать еще:
Нажмите кнопку, чтобы поделиться материалом:
Музыка Новости Общение
Подписывайся !
Присоединяйся
Источник
Параметры Тиля — Смолла: что скрыто за картами. Журнал «Автозвук»
Сохранить и прочитать потом —
Какие карты имеются в виду — понятно, надеюсь. Те, что мы сдали сами себе в прошлом выпуске, — три магические карты Тиля — Смолла. Так вроде теперь всё разъяснилось, что там может скрываться? Производители всего мира вняли мирной инициативе двух выдающихся акустиков, стали прикладывать к своим изделиям параметры, получившие имена этих же двух выдающихся (правда, иногда забывают), так что теперь берём готовые цифры и.
Четыре конструктивных, производственных характеристики динамика, из которых получаются потом параметры Тиля — Смолла
Резонансная частота определяется массой подвижной системы и жёсткостью подвеса, какова площадь диффузора и какой у него привод, этому параметру и дела нет. Цветные стрелки показывают, как будет меняться параметр при росте той или иной конструктивной величины
А эквивалентному объёму нет дела до массы подвижной системы: площадь диффузора и жёсткость его подвеса — вот всё, что определяет величину Vas
Добротности динамика есть дело до всего. Масса и жёсткость тянут её вверх, а мотор, превратившийся в электрический тормоз — вниз
Если просто взять и утяжелить диффузор, снизится резонансная частота, повысится добротность и упадёт чувствительность
Если сделать более жёсткой подвеску, Vas упадёт, но повысится резонансная частота. И — опять добротность, ведь упругих сил в системе стало больше
Если, ничего не трогая, сделать более мощным привод диффузора, возрастёт чувствительность и снизится добротность
Чтобы удержать Fs и Qts на требуемых значениях, но снизить требования к объёму, приходится одновременно утяжелять диффузор, делать более жёстким подвес и форсировать привод. Расплата, тем не менее, неизбежна: чувствительность таких головок оказывается невысокой. Вы только что присутствовали при рождении автомобильного сабвуфера
Над практической басовой акустикой висит тяжкое проклятие, снять которое, главное, не удастся никогда и никакими заклинаниями, надо научиться с этим жить. Есть три характеристики басовой акустики, определяющие её достоинства. Опять три, так уж получается, и не только в акустике. Это:
— Глубина баса, то есть нижняя частотная граница
— Чувствительность, или к.п.д.
— Компактность оформления
Идеальной акустикой будет такая, которая будет давать МНОГО баса, НИЗКОГО баса и в МАЛЕНЬКОМ ящике. Ну чем не предел мечтаний? Задача физики, однако, обламывать крылья мечтам. Проклятие как раз в том, что ни одна из этих характеристик не может быть качественно улучшена без ухудшения одной или обеих остальных. Возьмём какую-нибудь акустику с определённым балансом достоинств и попробуем что-нибудь в ней улучшить. Например, резко повысить чувствительность, а остальное пусть останется таким же. Дудки — получится акустика профессионального назначения, для озвучивания залов. С рекордными значениями чутья, но без глубоких басов и/или требующая огромных корпусов. Вернём на место глубокий бас — и убедимся: чувствительность упала, объём по-прежнему требуется немалый. Пример — домашняя акустика: часто напольные и полочные колонки одной серии различаются, главным образом, нижней граничной частотой. Ну и объёмом, разумеется. Поборемся за компактность, не поступаясь глубокими басами, и чувствительность проваливается иногда самым катастрофическим образом. Это как раз наш случай, автомобильный. Наши сабвуферы от таких же по калибру, используемых в pro audio, по чувствительности отличаются иной раз на 10 — 12 дБ, а это означает, что для создания одного и того же звукового давления (при прочих равных условиях) на «не наш» динамик достаточно подать 1 Вт, а «нашему» надо 10. «Не нашему» 10 — «нашему» 100. «Не нашему» 100 — нашему кирдык.
И ЧТО? ВОТ ДАЖЕ ИНТЕРЕСНО, что? Можно так: подставляем в программу для расчёта сабвуферов, которых теперь хоть пруд пруди, а уж она нам всё расскажет — куда ставить да как сыграет. Но есть часть населения, которая иногда задаётся вопросом: «А как это сделано?» Ведь и параметры Тиля — Смолла не с неба свалились. Они собраны из других деталей, которыми раньше инженеры-акустики пользовались в исходном, разобранном состоянии. Если упомянутый чуть выше вопрос свойственен вашей натуре, продолжайте читать, попытаюсь пролить свет.
СБОРКА И РАЗБОРКА
Параметры бывают конструктивные и неконструктивные. Это не достоинство или недостаток, это — свойство. Для первых есть точный рецепт, как их добиться. Вторые получаются в результате совместной работы первых. Очень часто в технике оказывается, что конструктивные параметры абсолютно необходимы при изготовлении устройства, но страшно неудобны, когда надо оценить результаты работы готового продукта. Приведу пример.
На автомобильном заводе нет таких станков, на которых были бы рукоятки, например, «максимальная скорость». Или «время разгона до 100». Или «тормозной путь на сухом асфальте». У автомобилестроителей в ходу совсем иные показатели: диаметр того, сечение этого, масса третьего, упругость четвёртого, и так до бесконечности. Именно это содержится в чертежах, именно на это настраиваются станки. А теперь предположим, что вам предложили выбрать автомобиль по этим данным. Вот вам машина, диаметр цилиндра такой-то (даже с допуском плюс-минус сколько-то сотых миллиметра), вот гидравлическое сопротивление впускного коллектора, а вот — момент инерции коленчатого вала. Вам подходит? Нет, скажете вы, будьте любезны хотя бы максималку, от нуля до сотни и тормозной путь, чтобы хоть было с чем сравнить. Но получается, что цифры инженеров вам не очень нужны, а по вашим эти же инженеры не берутся сделать автомобиль. Вот и «у птичек точно так же».
Динамик по своей схеме — устройство предельно примитивное. По схеме, не по тонкостям взаимодействия с окружающей средой и тем более — с человеческим слухом. Это — всего лишь масса (диффузор), подвешенная на пружине (подвес), к массе прикреплён мотор, состоящий из катушки (звуковой) и постоянного магнита (магнит он и есть магнит). Всё остальное — подробности. Все параметры динамика, определяющие его работу на низких частотах, так или иначе сидят здесь, но расселись они не самым очевидным образом. И на заводе по производству динамиков тоже нет волшебных станков с рукоятками Fs, Vas и Qts, до этого наука не дошла. Зато там можно сделать диффузор с определёнными размерами и массой, детали подвеса с определённой упругостью, катушку с известным сопротивлением и магнит с определённой силой.
Пока Тиль и Смолл не опубликовали свою «энциклику», инженеры-акустики всего мира при расчётах акустических характеристик пользовались теми же параметрами динамиков, что и при их производстве. Или почти теми же, получившими название «электроакустические параметры», в отличие от именных, Тиля и Смола. Так делали многие годы, с номограммами и формулами, но было это почти так же муторно, как пытаться рассчитать время пути на дачу, имея полный комплект конструкторской документации на автомобиль, но не зная важнейших его ездовых характеристик.
Величие, не побоюсь этого слова, двух классиков заключалось в том, что они отважились предложить заменить параметры, прямо связанные с конструкцией динамика, на другие, связанные с ней довольно опосредованно и неочевидно.
Разберём динамик на те немногие части, из которых он состоит и про которые, по отдельности, можно всё довольно легко узнать. Только разбирать надо в правильной последовательности, чтобы дров не наломать. Пока динамик ещё не раздербанили, узнаем гибкость подвеса. Это несложно: положить на диффузор груз и измерить, насколько он под весом этого груза просел. Потом поделить просадку на массу груза и получить то, что называется гибкостью подвеса (Cms, измеряется в миллиметрах на Ньютон). Теперь можно ломать. Отделяем диффузор вместе со звуковой катушкой, то есть то, что в не разломанном на части динамике колеблется, линейкой выясняем диаметр диффузора, калькулятором — площадь, весами — массу. У звуковой катушки мы измерим длину провода, потраченного на её намотку. А у освобождённого теперь магнита измерим индукцию в зазоре, есть такие приборы, называются теслометры, потому что результат выдают в единицах, названных по имени чудесного сербского физика Николы Теслы. Две последние величины, если их не мешкая перемножить друг на друга (по отдельности они малополезны), называются силовым фактором динамика, обозначается так же, как и вычисляется, BL, то есть индукция (мощность магнитного поля, грубо говоря) на длину провода, находящегося в этом поле. «Силовой фактор» потому так называется, что BL — это своего рода заготовка для определения силы, действующей на диффузор при подаче тока в катушку. Сила, действующая на проводник с током в магнитном поле, в пределах гимназического курса, равна B x I x L, то есть достаточно силовой фактор помножить на ток, как фактор превращается в реальную силу. В числе базовых параметров Тиля — Смолла силового фактора нет, а величина эта — архиважная, в ней, действительно, вся сила динамика.
Зная всё это, попробуем без формул, на качественном уровне, попытаться понять, какими окажутся параметры динамика, те самые, «ездовые», необходимые нам для расчёта и моделирования его работы. И поймём, в каком трудном положении находятся разработчики акустики.
Первый и главный параметр динамика — резонансная частота Fs. Главный, потому что, очень сильно упрощая, можно сказать: динамик излучает только выше своей резонансной частоты. Упрощая чуть меньше, скажем так: ниже резонансной частоты интенсивность звукового излучения динамика быстро падает. Так вот: из всех параметров отдельных частей распатроненного динамика резонансная частота зависит только от двух: массы подвижной системы и гибкости подвеса. Ни до площади диффузора, ни до стати магнита ей и дела нет. Чем больше масса и чем мягче подвес (больше величина просадки при одном и том же усилии, приложенном к диффузору), тем резонансная частота ниже. А-а-тлично, говорим мы, вообразив себя (на время, потом сами не захотите) конструкторами динамика. Диффузор — ладно, он должен быть всё-таки достаточно прочным, значит, масса у него какая-то есть. Теперь сделаем мягкий-мягкий подвес (большую-большую величину Cms), и у нас будет резонансная частота, какую захотим, хоть 15 Гц, будет играть всё, и даже с запасом. Ну, оставим пока за скобками вопрос, всегда ли нужна такая низкая резонансная частота, вы и без этого уже попали. Потому что другой из судьбоносных параметров, эквивалентный объём Vas, тоже зависит только от двух конструктивных характеристик, но уже от иных.
Эквивалентному объёму тоже нет дела до магнита, катушки и протекающего через неё тока, хоть вовсе их оторвать, как мы делали при разборке динамика. Vas зависит только и исключительно от площади диффузора (чем больше Sd, тем больше Vas) и гибкости подвеса (чем мягче подвес, то есть больше Cms, тем снова больше). Это — единственный параметр из тройки Тиля — Смолла, который при некотором навыке можно, пусть очень грубо, оценить голыми руками. Во всяком случае, в сравнении двух динамиков одинакового калибра. Нужны именно руки: эквивалентный объём будет меньше у того из двух, у кого сильнее сопротивляется диффузор при нажатии на него. Поскольку площадь диффузора одна и та же, а кроме неё и упругости подвеса, Vas не зависит ни от чего, что в нашей власти.
Масса, обратите внимание, здесь уже ни при чём. А теперь смотрите, что получилось. Гибкость совсем недавно вы сами выбрали очень высокую. Эквивалентный объём получился огромный, а он самым существенным образом определяет величину необходимого объёма акустического оформления любого типа. Что будем делать? Предприимчивый человек тут сообразит: раз Vas от массы не зависит, схитрим — сделаем диффузор потяжелее, а подвес — пожёстче, итог для резонансной частоты будет тот же самый, одно скомпенсирует другое. А эквивалентный объём уменьшится, он зависит только от гибкости. Могу вас обрадовать и огорчить одновременно. Огорчить — потому что вы не первый, кто до этого додумался. Перед вами в очереди за авторским вознаграждением стоят практически все производители автомобильной басовой акустики. А обрадовать — тем, что по находчивости вы им не уступаете. Получается, есть универсальное решение? Делаем дико тяжёлый диффузор, страшно жёсткий подвес, получаем (при той же Fs) ужасно маленький эквивалентный объём, и дело в шляпе. Но на деле всё будет как раз дико, страшно и ужасно.
Это можно было и предвидеть, при вашей-то сообразительности. Не бывает в реальном мире таких простых и, главное, бесплатных решений. Динамик-то должен играть, совершать некоторое полезное действие, а значит, у него должен быть пристойный коэффициент этого полезного действия, более привычно измеряемый в нашей дисциплине в форме чувствительности. Чувствительность, то есть звуковое давление, создаваемое динамиком при подаче одной и той же мощности (обычно 1 Вт) на одном и том же расстоянии от диффузора (обычно 1 м), зависит уже от трёх величин, снятых нами с деталей загубленного во имя просвещения динамика. От площади диффузора, от возможностей мотора и. от массы подвижной системы. Будем считать: диаметр мы выбрали и не меняем, хотя, вообще-то, чем он больше, тем больше будет чувствительность при прочих равных. И мотор, то есть магнитная система, и звуковая катушка у нас одни и те же. Тогда чем больше мы утяжелили диффузор, тем меньше будет чувствительность динамика. Получается, хитрость удалась лишь отчасти: выиграли объём — утеряли чувствительность.
Уже в этих четырёх соснах (растущих группами по две) разработчикам басовых головок приходится не первый год блуждать, бормоча про себя: «Ужесточим подвеску — резонанс вверх уплывёт, смягчим — объём потребуется большой, утяжелим диффузор — вернём резонанс и Vas, но в чутье потеряем, тогда облегчим диффузор — резонанс уплывёт. » И так до бесконечности. Единого решения нет, оттого и разными получаются сабвуферы. Но ведь это ещё полбеды. Мы ни словом пока не обмолвились про добротность, а это из трёх параметров Тиля — Смолла самый, пожалуй, капризный. На величину добротности готового динамика влияют все запчасти, на которые мы его совсем недавно разобрали, кроме корзины и клемм. Логика влияния такова (только логика, без формул): добротность есть отношение всего, что похоже на маятник, ко всему, что похоже на тормоз. Масса диффузора — это маятник, упругость подвеса — тоже. А мотор, как мы знаем, вблизи резонанса становится тормозом и занимает положенное ему место в знаменателе пропорции. Есть ещё фактор механической добротности, за которую ответственны потери в элементах подвеса, но в основном свою роль играет фактор электрического торможения, более поддающийся прогнозу.
Значит, чем больше масса подвижной системы, тем выше добротность, чем жёстче подвес — тем тоже выше, чем мощнее магнитная система — тем, наоборот, ниже. Здесь уже навскидку ничего оценить не удастся. Приходилось видеть головки с худосочным магнитом, имеющие такую же величину добротности, что и такие же по калибру, но с огромным магнитищем. Но достаточно было пошевелить «невооружённой рукой» диффузор одного и другого, как становилось ясно, в чём секрет: диффузор первого динамика чутко реагировал даже на слабое нажатие, а у второго стоял как вкопанный, пока на него не навалишься как следует. Значит, если частоты резонанса у обоих близки, можно с уверенностью заявить: одинаковые частотные характеристики у обоих можно получить в совершенно разных объёмах. У мягкого и с маленьким магнитом — в большом, у второго, у которого всё наоборот — в маленьком. Почти наверняка у второго будет ниже чувствительность, несмотря на могучий мотор, и совсем наверняка второй будет дороже первого.
Человек с практическим отношением к природе должен в какой-то момент сообразить: мощность привода ведь зависит не только от магнита, но и от того, сколько провода находится в зазоре. Магнит стоит денег, так давайте просто намотаем побольше витков, эффект такой же, ведь индукция и длина провода в выражении для силового фактора перемножаются. Попытка хорошая. Слишком хорошая, чтобы стать удачной с первого раза. Больше витков — это ведь значит более тонкий провод, у звуковой катушки возрастёт сопротивление, ток, проходящий через катушку уменьшится, ничего мы не добились. «Ну, тогда возьмём провод толще, а катушку намотаем в два-три-четыре слоя». Да хоть в пять, для более толстой намотки придётся делать больше ширину зазора в магнитной системе, а значит, при том же магните значение индукции в зазоре упадёт. Снова приплыли. Увеличим не число витков, а диаметр катушки (чтобы больше была длина каждого витка) — тот же результат: магнитное поле окажется «размазанным» по более протяжённому зазору и потеряет силу, выраженную в величине индукции. Ну как, нравится вам теперь профессия конструктора динамических головок?
Теперь вы знаете, как родились ставшие общепринятыми характеристики сабвуферов автомобильного назначения, путём жертв, лишений, вечных компромиссов и попаданий не на одно, так на другое. А как этими, выстраданными кем-то за нас (и для нас) характеристиками пользоваться — в следующий раз.
Источник
Как рассчитать массу подвижных грузов Помогите с формулой по физике (механика) Какие есть формулы для нахождения
wordster
Знаток
(419),
закрыт
7 лет назад
daniil konin
Ученик
(182)
7 лет назад
Расписываете все силы, которые действуют на груз, выбираете систему координат, пишите уравнение для оси Y и оси X,обычно тело движется по оси X,значит пишет ma=…и расписываем силы, отсюда можно найти массу

Сергей Сергеевич Соев
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Подвижный блок отличается от неподвижного тем, что его ось не закреплена, и он может подниматься и опускаться вместе с грузом.
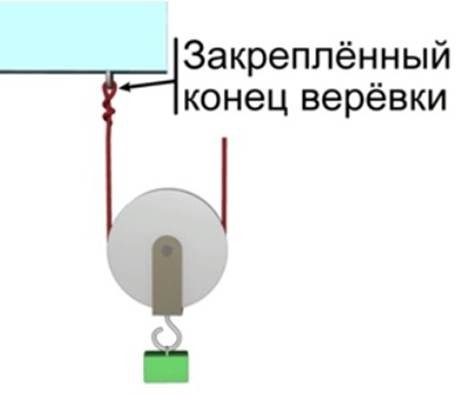
Рисунок 1. Подвижный блок
Как и неподвижный блок, подвижный блок состоит всё из того же колеса с желобом для троса. Однако здесь закреплен один конец троса, а колесо подвижно. Колесо движется вместе с грузом.
Как заметил ещё Архимед, подвижный блок по сути является рычагом и работает по тому же принципу, давая выигрыш в силе за счёт разницы плеч.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
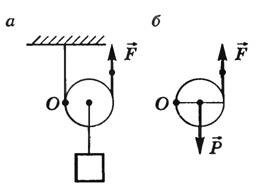
Рисунок 2. Силы и плечи сил в подвижном блоке
Подвижный блок перемещается вместе с грузом, он как бы лежит на веревке. В таком случае точка опоры в каждый момент времени будет находиться в месте соприкосновения блока с веревкой с одной стороны, воздействие груза будет приложено к центру блока, где он и крепится на оси, а сила тяги будет приложена в месте соприкосновения с веревкой с другой стороны блока. То есть плечом веса тела будет радиус блока, а плечом силы нашей тяги — диаметр. Правило моментов в этом случае будет иметь вид:
$$mgr = F cdot 2r Rightarrow F = mg/2$$
Таким образом, подвижный блок дает выигрыш в силе в два раза.
Обычно на практике применяют комбинацию неподвижного блока с подвижным (рис. 3). Неподвижный блок применяется только для удобства. Он, изменяет направление действия силы, позволяет, например, поднимать груз, стоя на земле, а подвижный блок обеспечивает выигрыш в силе.
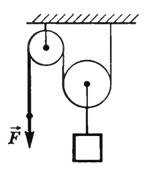
Рисунок 3. Комбинация неподвижного и подвижного блоков
Мы рассмотрели идеальные блоки, то есть такие, в которых не учитывалось действие сил трения. Для реальных же блоков необходимо вводить поправочные коэффициенты. Используют такие формулы:
Неподвижный блок
$F = f • mg $
Подвижный блок
$F = f • 1/2 mg $
В этих формулах: $F$ – прилагаемое внешнее усилие (обычно это сила рук человека), $m$ – масса груза, $g$ – коэффициент силы тяжести, $f$ – коэффициент сопротивления в блоке (для цепей примерно 1,05, а для верёвок 1,1).
«Подвижный блок» 👇
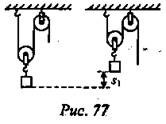
Задача 1
С помощью системы из подвижного и неподвижного блоков грузчик поднимает ящик с инструментами на высоту $S_1$ = 7 м, прикладывая силу $F$ = 160 Н. Какова масса ящика, и сколько метров верёвки придётся выбрать, пока груз поднимется? Какую работу выполнит в результате грузчик? Сравните её с работой, выполненной над грузом по его перемещению. Трением и массой подвижного блока пренебречь.
Решение
Дано:
$F$ = 160 H
$S_1$ = 7 м
$m, S_2 , A_1 , A_2$ – ?
Подвижный блок даёт двойной выигрыш в силе и двойной проигрыш в перемещении. Неподвижный блок не даёт выигрыша в силе, но меняет её направление. Таким образом, приложенная сила будет вдвое меньше веса груза: $F = 1/2P = 1/2mg$, откуда находим массу ящика: $m=frac{2F}{g}=frac{2cdot 160}{9,8}=32,65 кг$
Перемещение груза будет вдвое меньше, чем длина выбранной верёвки:
[S_2=2S_1=2cdot 7=14 м]
Выполненная грузчиком работа равна произведению приложенного усилия на перемещение груза: $A_2=Fcdot S_2=160cdot 14=2240 Дж $.
Работа, выполненная над грузом:
[A_1=mgS_1=32,65cdot 9,8cdot 7=2240 Дж]
Ответ: Масса ящика 32,65 кГ. Длина выбранной верёвки 14 м. Выполненная работа равна 2240 Дж и не зависит от способа подъёма груза, а только от массы груза и высоты подъёма.
Задача 2
Какой груз можно поднять с помощью подвижного блока весом 20 Н, если тянуть веревку с силой 154 Н?
Решение
Дано:
$Р_Б$ = 20 Н
$F$ = 154 H
$f$ = 1,1
$P$ – ?
Запишем правило моментов для подвижного блока: $F = f • 1/2 (P+ Р_Б)$, где $f$ – поправочный коэффициент для верёвки.
Тогда $P=2frac{F}{f}-P_Б=2cdot frac{154}{1,1}-20=260 Н$
Ответ: Вес груза 260 Н.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме

Пример решения задачи по расчету максимальной массы груза F не нарушающей равновесие системы «тело-блок-груз» соединенных нитью, без учета трения на блоке.
Задача
Тело A массой m = 8 кг поставлено на шероховатую горизонтальную поверхность стола. К телу привязана нить, перекинутая через блок B (рисунок 2.5, а).
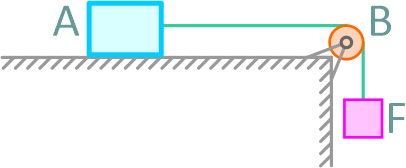
Рисунок 2.5, а
Какой груз F можно подвязать к концу нити, свешивающейся с блока, чтобы не нарушить равновесия тела A?
Коэффициент трения f = 0,4; трением на блоке пренебречь.
Другие примеры решений >
Помощь с решением задач >
Решение
Определим вес тела A:
![]()
Считаем, что все силы приложены к телу A. Когда тело поставлено на горизонтальную поверхность, то на него действуют только две силы: вес G и противоположно направленная реакция опоры RA (рисунок 2.5, б).
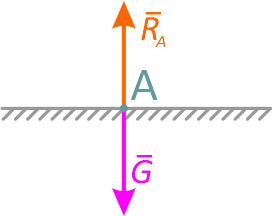
Рисунок 2.5, б
Если же приложить некоторую силу F, действующую вдоль горизонтальной поверхности, то реакция RA, уравновешивающая силы G и F, начнет отклоняться от вертикали, но тело A будет находиться в равновесии до тех пор, пока модуль силы F не превысит максимального значения силы трения Rf max, соответствующей предельному значению угла φo (рисунок 2.5, в).
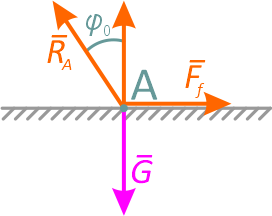
Рисунок 2.5, в
Разложив реакцию RA на две составляющие Rf max и Rn, получаем систему четырех сил, приложенных к одной точке (рисунок 2.5, г).
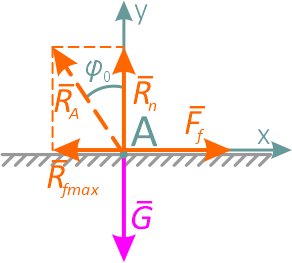
Рисунок 2.5, г
Спроецировав эту систему сил на оси x и y, получим два уравнения равновесия:
Решаем полученную систему уравнений: F = Rf max, но Rf max= f∙Rn, а Rn = G, поэтому
![]()
Таким образом, равновесие тела A сохраняется при условии, что к концу нити, перекинутой через блок, подвешен груз, не превышающий по весу 31,4 Н. При этом масса груза F
Другие примеры решения задач >
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
Содержание:
- Динамика механической системы
- Геометрия масс
- Механическая система. Центр масс механической системы
- Порядок решения задач на определение центра масс механической системы
- Примеры решения задач на тему: Определение центра масс механической системы
- Моменты инерции твердого тела относительно оси
- Моменты инерции некоторых однородных тел
- Примеры решения задач на тему: Моменты инерции твердого тела относительно оси
- Теорема о движении центра масс механической системы
- Закон сохранения движения центра масс
- Порядок решения задач на применение теоремы о движении центра масс
- Примеры решения задач на тему: Теорема о движении центра масс механической системы
- Теорема об изменении количества движения точки и механической системы
- Импульс силы
- Теорема об изменении количества движения точки и системы
- Закон сохранения количества движения системы
- Порядок решения задач на применение теоремы об изменении количества движения точки и механической системы
- Примеры решения задач на тему: Теорема об изменении количества движения точки и механической системы
- Теорема об изменении момента количества движения точки и механической системы
- Дифференциальное уравнение вращательного движения тела вокруг неподвижной оси
- Порядок решения задач на применение теоремы об изменении момента количества движения точки и механической системы
- Примеры решения задач на тему: Теорема об изменении момента количества движения точки и механической системы
- Теорема об изменении кинетической энергии механической системы
- Кинетическая энергия механической системы
- Определение кинетической энергии твердого тела в различных случаях его движения
- Порядок решения задач на использование теоремы об изменении кинетической энергии механической системы
- Примеры решения задач на тему: Теорема об изменении кинетической энергии механической системы
Динамика механической системы – изучает движение совокупности материальных точек и твердых тел, объединяемых общими законами.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Динамика механической системы
В предыдущей главе рассматривались задачи, связанные с движением материальной точки, которая находится под действием приложенных к ней сил. Однако часто приходится встречаться с такими случаями, когда движение одной точки невозможно рассматривать изолированно от движения других материальных точек. Это заставляет нас перейти к изучению движения совокупности материальных точек, или механических систем.
В механике под механической системой материальных точек или тел имеют в виду такую их совокупность, в которой положение или движение каждой точки (или тела) зависит от положения или движения всех других.
Совокупность тел, между которыми отсутствуют силы взаимодействия и движение которых никаким образом не связано друг с другом, механическую систему не создают. Механические системы бывают свободными и несвободными.
Система материальных точек, движение которых не ограничено никакими связями, а определяется только действующими на эти точки силами, называется системой свободных точек.
Система материальных точек, движение которых ограничивается наложенными на точки связями, называется системой несвободных точек.
Решение задач динамики механической системы базируется на теоремах динамики и некоторых принципах, которые будут рассмотрены в данной главе.
Геометрия масс
Геометрия точки масс, в просторечии известная как точки масс , является проблемой геометрии – метод решения , который применяет физический принцип центра масс к геометрическим задачам, включающим треугольники и пересекающиеся чевианы . Все задачи, которые могут быть решены с использованием геометрии материальных точек, также могут быть решены с использованием аналогичных треугольников, векторов или соотношений площадей, но многие студенты предпочитают использовать массовые точки.
Механическая система. Центр масс механической системы
В механике под механической системой подразумевают совокупность взаимодействующих между собой материальных точек или тел.
Частным случаем механической системы является абсолютно твердое тело.
Массой механической системы называется сумма масс всех точек, входящих в систему:

где  – масса материальной точки с номером
– масса материальной точки с номером  ,
,
 – число всех точек системы.
– число всех точек системы.
Центром масс (центром инерции) механической системы называется точка  (рис.5.1), радиус-вектор
(рис.5.1), радиус-вектор  которой определяется по формуле:
которой определяется по формуле:

где  – масса системы материальных точек;
– масса системы материальных точек;
 – радиус-вектор точки с массой .
– радиус-вектор точки с массой .
Декартовы координаты центра масс системы материальных точек определяются по зависимостям:

Здесь  – координаты
– координаты  -ой материальной точки.
-ой материальной точки.

Для твердого тела центр масс совпадает с центром тяжести.
Порядок решения задач на определение центра масс механической системы
Решение задач, в которых необходимо определить положение центра масс и уравнение его траектории, рекомендуется проводить в следующей последовательности:
Выбрать систему координат.
Записать координаты центров тяжести каждой из масс системы, выразив их в виде функций времени:

Определить координаты центра масс системы по формулам (5.1), при этом  будут функциями времени, то есть, полученные выражения будут параметрическими уравнениями движения центра масс.
будут функциями времени, то есть, полученные выражения будут параметрическими уравнениями движения центра масс.
Для нахождения уравнений траектории центра масс надо с последних выражений (пункт 3) исключить время.
Примеры решения задач на тему: Определение центра масс механической системы
Задача № 1
Определить положение центра масс центробежного регулятора, изображенного на рис.5.2, если вес каждого из шаров  и
и  равен
равен  , вес муфты
, вес муфты  равен
равен  . Пули и считать материальными точками. Массой стержней пренебречь.
. Пули и считать материальными точками. Массой стержней пренебречь.
Решение. Система координат, относительно которой необходимо определить положение центра масс, изображена на рис.5.2.
Для определения положения центра масс системы надо определить его координаты по формулам (5.1):

где 
 – координаты центра масс пуль , и муфты .
– координаты центра масс пуль , и муфты .
Следовательно,

Находим координаты центров масс:
пули : 
пули : 
муфты : 
Тогда:

поскольку


Ответ: 
Задача № 2
Найти уравнение движения центра масс шарнирного параллелограмма  а также уравнение траектории его центра масс при вращении кривошипа
а также уравнение траектории его центра масс при вращении кривошипа  с постоянной угловой скоростью
с постоянной угловой скоростью  . Звенья параллелограмма – однородные стержни (рис.5.3), и
. Звенья параллелограмма – однородные стержни (рис.5.3), и 

Решение. Начало системы координат свяжем с шарниром  кривошипа . Ось
кривошипа . Ось  направим справа по линии
направим справа по линии  а ось
а ось  – перпендикулярно линии
– перпендикулярно линии  .
.
Поскольку звенья 1,2,3 параллелограмма однородны, то центры масс их лежат посередине звеньев (точки  ).
).
Из размеров звеньев вытекает: 
Определим координаты центров масс звеньев механизма как функции угла поворота  (рис.5.3):
(рис.5.3):

Для определения координат центра масс шарнирного параллелограмма  воспользуемся зависимостью (5.1):
воспользуемся зависимостью (5.1):


Для определения уравнения траектории центра масс (точки ) исключим параметр  из уравнений (1) и (2). С этой целью выполним следующие преобразования:
из уравнений (1) и (2). С этой целью выполним следующие преобразования:

Сложим, соответственно, левые и правые части этих уравнений:

Таким образом, траекторией центра масс шарнирного параллелограмма является окружность:
с радиусом, равным  , с центром в точке
, с центром в точке  с координатами
с координатами 
Ответ: 

Задача № 3
Определить траекторию центра масс механизма эллипсографа (рис.5.4), который состоит из муфт и весом  каждая, кривошипа
каждая, кривошипа  весом
весом  и линейки
и линейки  весом
весом  , если
, если 

Считать, что линейка и кривошип есть однородные стержни, а муфты – точечные массы.
Решение. Механизм состоит из 4 подвижных звеньев. Для удобства решения задачи пронумеруем звенья соответственно рис.5.4.
Система координат, относительно которой будет определяться траектория центра масс механизма показана на рисунке.
Сначала определим координаты центров масс всех звеньев механизма:

Для определения координат центра масс механизма эллипсографа воспользуемся формулой (5.1):

Следовательно, координаты центра масс эллипсографа имеют значения:

Для нахождения уравнения траектории центра масс в явном виде необходимо из этих уравнений исключить угол  . Решив оба уравнения относительно
. Решив оба уравнения относительно  и
и  , возводя их затем к квадрату и сложив, получим:
, возводя их затем к квадрату и сложив, получим:

Траекторией центра масс является окружность с центром в точке и радиусом  , который равен:
, который равен:

Ответ: 
Задача № 4
Определить зависимость от угла поворота кривошипа координат центра масс кривошипно-ползунного механизма, что изображено на рис.5.5. Длина кривошипа  , его вес
, его вес  , длина шатуна
, длина шатуна  , его вес
, его вес  , вес ползуна
, вес ползуна  .
.
Решение. Выберем систему координат  как показано на рис.5.5. Рассмотрим механизм в произвольном положении, которое определяется углом (для любого положения
как показано на рис.5.5. Рассмотрим механизм в произвольном положении, которое определяется углом (для любого положения  , так как
, так как  ).
).
Применяя формулу (5.1), получим:

где  – координаты центров тяжести тел, составляющих систему,
– координаты центров тяжести тел, составляющих систему,
– масса всей системы.
С рис.5.5 находим:

Масса всей системы в данном случае равна:

Подставляя в выражения (1) и (2) значения координат центров масс тел механической системы и величину массы системы , получим:

Ответ: 
Задача № 5
Определить уравнение траектории центра масс кулисного механизма (рис.5.6), если вес кривошипа равен , вес ползуна равен , а вес кулисы и штанги  равен
равен  . Кривошип, который вращается с постоянной угловой скоростью , считать тонким однородным стержнем, а ползун – точечной массой. Центр тяжести кулисы и штанги расположен в точке
. Кривошип, который вращается с постоянной угловой скоростью , считать тонким однородным стержнем, а ползун – точечной массой. Центр тяжести кулисы и штанги расположен в точке  , причем
, причем  . При расчетах принять:
. При расчетах принять:

Будем считать, что в начальный момент ползун занимал крайнее правое положение.
Решение. Выберем оси декартовых координат, как показано на рисунке, где положение кулисного механизма соответствует моменту времени . Так как кривошип вращается равномерно, то его угол поворота равен 
Для определения положения центра масс системы необходимо найти его координаты  и
и  по формуле (5.1).
по формуле (5.1).
Поскольку механическая система состоит из трех тел – кривошипа , ползуна и кулисы со штангой , то:

Индекс 1 соответствует кривошипу, индекс 2 – ползуну , индекс 3 – кулисе со штангой.

Из рисунка видно:

Подставим значения  в формулы для определения и .
в формулы для определения и .

Исключим время в уравнениях, которые определяют движение центра масс.
Для этого решим оба уравнения относительно  и
и  :
:

Возведем эти уравнения к квадрату и добавим:

Таким образом, траекторией центра масс кулисного механизма является эллипс с полуосями  и
и 
Центр эллипса лежит на оси  и отдален от начала координат вправо на расстояние
и отдален от начала координат вправо на расстояние 
Ответ: 
Моменты инерции твердого тела относительно оси
Влияние собственных свойств тела на вращательное движение значительно сложнее, чем в поступательном движении.
Также как масса тела является мерой инертности тела при его поступательном движении, так и момент инерции тела относительно данной оси является мерой инертности тела при его вращательном движении.
Как мера инертности тела момент инерции входит во все формулы вращательного движения. Не зная момента инерции тела, не умея его определить, нельзя решать задачи, которые связаны с вращательным или сложным движением тела, частью которого является вращательное движение.
Момент инерции тела (системы) относительно оси, например  , обозначим
, обозначим  (индекс указывает на ось, относительно которой определяется момент инерции).
(индекс указывает на ось, относительно которой определяется момент инерции).
Моментом инерции тела относительно оси, например  , называется скалярная величина, равная сумме произведений масс точек тела на квадраты их расстояний к оси:
, называется скалярная величина, равная сумме произведений масс точек тела на квадраты их расстояний к оси:

Если тело сплошное, то под необходимо понимать массу элементарной частицы тела  , тогда момент инерции будет выражаться интегралом:
, тогда момент инерции будет выражаться интегралом:

где  – расстояние доли от оси.
– расстояние доли от оси.
Этот интеграл берется по всей массе тела. Очевидно, что величина момента инерции зависит от размеров и формы тела , а также от закона распределения массы в теле.
Момент инерции измеряется в системе СИ – в  , в технической системе – в
, в технической системе – в  .
.
Для тел правильной геометрической формы определение моментов инерции делается с помощью интегрального вычисления. Если тело имеет неправильную форму, то момент инерции его определяется либо приблизительно, путем разбития тела на несколько тел, которые имеют правильную геометрическую форму, либо экспериментально.
Для однородного тела, при плотности  :
:

где интеграл берется по всему объему тела.
Для однородной материальной поверхности:

где  – масса единицы плоскости поверхности и интеграл берется по всей плоскости поверхности.
– масса единицы плоскости поверхности и интеграл берется по всей плоскости поверхности.
Для однородной материальной линии:

где – масса единицы длины линии. Интеграл берется по длине  .
.
Для одной материальной точки, которая находится на расстоянии от оси, момент инерции равен:

Иногда при определении момента инерции тела пользуются понятием радиуса инерции. Радиусом инерции тела относительно оси, например  , называется линейная величина
, называется линейная величина  , определяемая равенством:
, определяемая равенством:

где – масса тела.
Следовательно, радиус инерции определяет расстояние от оси к точке, в которой необходимо сосредоточить всю массу тела, чтобы момент инерции точки относительно этой оси равнялся моменту инерции тела.
Момент инерции системы относительно начала координат равен

Моменты инерции относительно координатных осей (осевые моменты) выражаются зависимостями:

Существует простая зависимость между моментами инерции тела относительно параллельных осей, одна из которых проходит через его центр масс (теорема Гюйгенса-Штейнера).
Момент инерции тела относительно любой оси равен моменту инерции тела относительно оси, проходящей через центр масс тела параллельно данной оси, плюс произведение массы тела на квадрат расстояния между осями:

где  – момент инерции тела относительно оси, которая проходит через центр масс и параллельна данной;
– момент инерции тела относительно оси, которая проходит через центр масс и параллельна данной;
 – момент инерции тела относительно данной оси;
– момент инерции тела относительно данной оси;
 – расстояние между осями.
– расстояние между осями.
Из выражения (5.4) вытекает, что наименьшим момент инерции тела будет относительно той оси, которая проходит через центр его масс.
Моменты инерции некоторых однородных тел
| Форма тела. | Схема тела. | Момент инерции. |
| Тонкий прямолинейный стержень |  |
 |
| -„- |  |
 |
| Круглая пластинка малой толщины |  |
 |
| Кольцо (материальная окружность) |  |
 |
| Круглый цилиндр |  |
 |
| Прямоугольный параллелепипед |  |
 |
| Полый шар со стенками малой толщины |  |
 |
| Шар |  |
 |
Примеры решения задач на тему: Моменты инерции твердого тела относительно оси
Задача №1
Маятник, изображенный на рис. 5.7, состоит из тонкого однородного стержня длиной  и массой
и массой  и круглого однородного диска с радиусом
и круглого однородного диска с радиусом  и массой
и массой 

Определить момент инерции  относительно оси его вращения (ось направлена перпендикулярно плоскости рисунка).
относительно оси его вращения (ось направлена перпендикулярно плоскости рисунка).
Решение. Маятник состоит из двух тел: стержня и диска, поэтому

где  и
и  моменты инерции относительно оси стержня и диска, соответственно.
моменты инерции относительно оси стержня и диска, соответственно.
Момент инерции стержня равен (см. 5.5):

Момент инерции диска найдем по формуле (5.4):

где  – момент инерции диска относительно оси, которая проходит параллельно оси через его центр масс, точку , а расстояние от центра масс к оси –
– момент инерции диска относительно оси, которая проходит параллельно оси через его центр масс, точку , а расстояние от центра масс к оси – 
Итак

Пользуясь выражениями для моментов инерции стержня (2) и диска (3), найдем момент инерции маятника относительно оси :

После подстановки в выражение (4) числовых данных, получим:

Ответ: 
Задача №2.
Определить момент инерции  стального вала радиуса
стального вала радиуса  см и массой
см и массой  относительно его образующей. Вал считать однородным сплошным цилиндром (рис.5.8).
относительно его образующей. Вал считать однородным сплошным цилиндром (рис.5.8).

Решение. Для определения момента инерции стального вала относительно оси  , надо воспользоваться формой Гюйгенса-Штейнера
, надо воспользоваться формой Гюйгенса-Штейнера

где  – момент инерции относительно оси
– момент инерции относительно оси  , которая проходит через центр масс тела.,
, которая проходит через центр масс тела.,
 – масса вала,
– масса вала,
 – расстояние между осями, равное радиусу вала.
– расстояние между осями, равное радиусу вала.

Тогда

Ответ: 
Задача № 3
Определить осевые моменты инерции  и
и  изображенной на рис.5.9 однородной прямоугольной пластинки весом .
изображенной на рис.5.9 однородной прямоугольной пластинки весом .

Решение. Определим момент инерции пластинки относительно оси . Для этого выделим на расстоянии  полоску шириной
полоску шириной  .
.
Момент инерции этой тонкой полоски относительно оси равен:

где  – масса полоски.
– масса полоски.
Масса полоски равна:

где  – площадь полоски;
– площадь полоски;
 – масса единицы площади поверхности пластинки.
– масса единицы площади поверхности пластинки.
Тогда:

а момент инерции всей пластинки будет равен сумме моментов инерции всех полосок, на которые можно разбить пластинку:

При предельном переходе, то есть, когда 

Итак,

Вычислим массу пластинки:

Таким образом

Момент инерции пластинки относительно оси  находим аналогичным путем и получим:
находим аналогичным путем и получим:

Ответ: 
Задача №4
Определить момент инерции относительно оси  однородного прямоугольного параллелепипеда весом (рис.5.10).
однородного прямоугольного параллелепипеда весом (рис.5.10).
Решение. Выделим элементарный параллелепипед со сторонами основания  и высотой
и высотой  Расстояние элементарного параллелепипеда от осей и равно
Расстояние элементарного параллелепипеда от осей и равно  и
и  соответственно.
соответственно.
Момент инерции элементарного параллелепипеда относительно оси равен:

где:  – масса элементарного параллелепипеда, равна:
– масса элементарного параллелепипеда, равна:


Тогда, 
а момент инерции всего параллелепипеда

При предельном переходе, то есть при  то сумма, которая стоит справа, переходит в двойной интеграл:
то сумма, которая стоит справа, переходит в двойной интеграл:

Вычислим двойной интеграл:

Масса параллелепипеда:

Следовательно,

Ответ: 
Задача №5
Определить момент инерции относительно оси тонкой однородной параболической пластинки (рис.5.11) массой . Предельная прямая пластинки параллельна оси и удалена от нее на расстояние  . Уравнение параболы, которая ограничивает пластинку, имеет вид
. Уравнение параболы, которая ограничивает пластинку, имеет вид 

Решение. Проведем на пластинке (рис.5.11) две прямые, параллельные оси и удаленные от нее на расстоянии и 
Вычислим момент инерции относительно оси элементарной полоски, которая ограничена этими прямыми и параболическим контуром пластинки (заштрихована на рисунке):

где – элементарная масса плоскости, которая равна:

Здесь  – плотность пластинки,
– плотность пластинки,
 – площадь пластинки.
– площадь пластинки.
Итак,

Из уравнения  вытекает
вытекает 
Таким образом

Момент инерции пластинки относительно оси равен:

Масса пластинки 
где площадь пластинки 
Тогда

Следовательно,

Ответ: 
Задача №6
Определить для тонкого равнобедренного треугольника  , основание которого равно , высота и масса (рис.5.12), его моменты инерции относительно основания и относительно высоты.
, основание которого равно , высота и масса (рис.5.12), его моменты инерции относительно основания и относительно высоты.

Решение. С серединой основания равнобедренного треугольника свяжем начало системы координат  ; ось проведем по основанию
; ось проведем по основанию  , а ось – перпендикулярно основанию.
, а ось – перпендикулярно основанию.
Для определения момента инерции треугольника относительно основания (относительно оси ) выделим на расстоянии  элементарную полоску шириной
элементарную полоску шириной  .
.
Момент инерции этой полоски относительно оси составит:

где  , масса полоски длиной
, масса полоски длиной  , равна:
, равна:

Тогда момент инерции элементарной полоски относительно основания будет равен:

Найдем зависимость между координатой и длиной полоски . Из сходства треугольников и  (рис.5.12) следует:
(рис.5.12) следует:
 или
или 
откуда

Подставив (2) у (1’), получим:

а момент инерции треугольника относительно основания определится как

или

В интеграле (3) границы координаты меняются от  к .
к .
Высчитаем интеграл (3):

Выразим момент инерции  через массу треугольника :
через массу треугольника :

Преобразуем выражение (4):

или

Перейдем к определению момента инерции треугольника относительно его высоты .
Поскольку у треугольника высота является осью симметрии, то достаточно определить момент инерции относительно этой оси для прямоугольного треугольника  , тогда
, тогда

где  – момент инерции треугольника ;
– момент инерции треугольника ;
 – момент инерции треугольника .
– момент инерции треугольника .
Расчетная схема для определения момента инерции приведена на рис.5.13.

Выделим элементарную полоску на расстоянии  от оси , ширина полоски –
от оси , ширина полоски –  , длина – .
, длина – .
Определим момент инерции этой полоски относительно оси :

где  – масса элементарной полоски.
– масса элементарной полоски.
Определим зависимость между длиной полоски и координатой . Из сходства треугольников  и получается:
и получается:
 или
или 
откуда

Подставив (6) у (5), получим:

Момент инерции треугольника относительно оси (относительно высоты  ), равен:
), равен:

или

Определим интеграл (7):

Окончательно,

Тогда, момент инерции треугольника относительно высоты будет равен:

Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 34.9, 34.12, 34.16 [2].
Теорема о движении центра масс механической системы
Силы, действующие на механическую систему, можно условно поделить на внешние и внутренние.
Силы, которые действуют на точки данной механической системы со стороны точек или тел, не входящих в эту систему, называются внешними.
Силы, действующие на точки механической системы со стороны точек данной системы, называются внутренними.
Внешние силы обозначаются верхним индексом  , внутренние –
, внутренние –  :
:  -внешняя сила,
-внешняя сила,  – внутренняя сила.
– внутренняя сила.
Внутренние силы обладают следующими свойствами:
а) геометрическая сумма (главный вектор) внутренних сил равна нулю:

б) геометрическая сумма моментов (главный момент) всех внутренних сил относительно любого центра или оси равна нулю:


Теорема о движении центра масс механической системы формулируется следующим образом:
Произведение массы системы на ускорение ее центра масс равно геометрической сумме всех внешних сил, действующих на систему.

где – масса системы;
 – ускорение центра масс;
– ускорение центра масс;
 – сумма внешних сил, которые действуют на систему.
– сумма внешних сил, которые действуют на систему.
Из сравнения приведенной выше формулы со вторым законом динамики, который, как известно, записан для материальной точки:

можно сделать следующий вывод:
Центр масс механической системы движется как материальная точка, в которой сосредоточено массу всей системы и к которой приложены те же внешние силы, действующие на систему.
Теорема о движении центра масс системы, если ее записать в проекциях на оси декартовой системы координат, имеет вид:

где  – координаты центра масс механической системы.
– координаты центра масс механической системы.
Из приведенных уравнений следует, что внутренние силы непосредственно не влияют на движение центра масс. Теорема позволяет исключить из рассмотрения все ранее неизвестные внутренние силы.
Задачи динамики поступательного движения твердого тела решаются с помощью теоремы о движении центра масс системы материальных точек.
Действительно, применив эту теорему, мы определим уравнение траектории, скорость и ускорение центра тяжести твердого тела. При поступательном движении твердого тела траектории всех его точек одинаковы, одинаковы и их скорости и ускорения.
Закон сохранения движения центра масс
Из теоремы о движении центра масс вытекает несколько следствий:
а) если геометрическая сумма всех внешних сил, действующих на систему, равна нулю, то центр масс механической системы находится в покое или движется равномерно и прямолинейно.
Пусть  , тогда
, тогда
 или
или  , поэтому
, поэтому 
Если изначально центр масс был в покое, то он и останется в покое. Если же начальная скорость не равна нулю, то центр масс движется прямолинейно и равномерно с этой скоростью;
б) если геометрическая сумма внешних сил, действующих на систему, не равна нулю, но сумма их проекций на какую-нибудь ось (например, ось ) равна нулю, то центр масс системы вдоль этой оси или не движется, или движется равномерно.
Если  , то:
, то:
 или
или  , поэтому
, поэтому 
Если при этом равна нулю начальная скорость, то есть  , то
, то  , то есть
, то есть 
Таким образом видим, что в этом случае координата центра масс механической системы во время ее движения остается неизменной.
При  проекция центра масс на ось движется равномерно.
проекция центра масс на ось движется равномерно.
Все эти результаты выражают законы сохранения движения центра масс системы.
Порядок решения задач на применение теоремы о движении центра масс
Рекомендуется такая последовательность решения задач:
Изобразить на рисунке все внешние силы, действующие на систему;
Выбрать систему координат;
Записать теорему о движении центра масс в векторной форме;
Спроектировать это векторное уравнение на оси координат;
Высчитать суммы проекций всех внешних сил на оси координат и подставить их в проекции уравнения движения;
Решить полученные уравнения и определить искомые величины.
Примеры решения задач на тему: Теорема о движении центра масс механической системы
Задача № 1
Определить главный вектор внешних сил, действующих на колесо весом , которое скатывается без скольжения с наклонной плоскости, если его центр масс движется по закону  (рис.6.1).
(рис.6.1).

Решение. Покажем внешние силы, которые действуют на колесо: силу тяжести  и реакцию поверхности
и реакцию поверхности  , которые проходят через центр масс колеса .
, которые проходят через центр масс колеса .
Запишем теорему о движении центра масс в векторной форме:

Выбираем систему координат  и спроектируем уравнение (1) на оси и :
и спроектируем уравнение (1) на оси и :

Поскольку  . то
. то  и
и  . То есть, главный вектор внешних сил является параллельным оси :
. То есть, главный вектор внешних сил является параллельным оси :

Найдем проекцию ускорения центра масс на ось :

Итак,

Ответ: 
Задача №2
Колесо весом и радиусом катится со скольжением по прямолинейной горизонтальной рейке в результате действия постоянной силы  , которая приложена к его центру тяжести (рис.6.2).
, которая приложена к его центру тяжести (рис.6.2).

Определить скорость центра масс колеса, если в начальный момент оно находилось в покое. Коэффициент трения скольжения равен  .
.
Решение. На колесо действуют внешние силы: – сила тяжести колеса, – движущая сила,  – нормальная реакция рейки,
– нормальная реакция рейки,  – сила трения скольжения, которая направлена вдоль рельса в сторону, противоположную силе .
– сила трения скольжения, которая направлена вдоль рельса в сторону, противоположную силе .
Запишем теорему о движении центра масс колеса в векторной форме:

где – ускорение центра масс колеса.
Спроектируем это уравнение на оси координат  :
:

Во время движения колеса  Итак
Итак  из второго уравнения (1) получаем:
из второго уравнения (1) получаем:

Поскольку при качении колеса со скольжением сила трения достигает своего максимального значения, то

Подставим (3) в первое из уравнений (1) и получим:

Поскольку

то

Согласно начальным условиям при  с тех пор находим, что произвольная постоянная
с тех пор находим, что произвольная постоянная 
Итак, закон изменения скорости центра масс колеса имеет вид:

Ответ: 
Задача №3
На однородную призму , которая лежит на горизонтальной плоскости, положили однородную призму (рис.6.3,а), поперечные сечения призм – прямоугольные треугольники, вес призмы втрое больше веса призмы . Необходимые размеры показаны на рисунке.
Определить длину , на которую передвинется призма , когда призма , спускаясь по поверхности призмы , дойдет к горизонтальной плоскости. Предположить, что все поверхности, которые соприкасаются, идеально гладкие.
Решение. Рассмотрим движение механической системы, состоящей из 2-х призм и . Призма , спускаясь по призме справа, как будто выжимает ее, отодвигает налево (рис.6.3, б).
Для решения этой задачи применим теорему о движении центра масс.
На систему действуют внешние силы: тяжести  призмы , тяжести
призмы , тяжести  призмы , нормальная реакция плоскости (рис.6.3). Внешняя сила трения призм по идеально гладкой поверхности равна нулю.
призмы , нормальная реакция плоскости (рис.6.3). Внешняя сила трения призм по идеально гладкой поверхности равна нулю.
Таким образом, все внешние силы системы вертикальны. Внутренние силы системы (давление призмы на призму , реакция на это давление, а также силы трения между призмами и ), нас не интересуют.
Введем систему координат  , ось направим по горизонтали справа и запишем теорему о движении центра масс системы в проекции на ось :
, ось направим по горизонтали справа и запишем теорему о движении центра масс системы в проекции на ось :

Поскольку внешние силы перпендикулярны оси , то

Тогда

где  – постоянная интегрирования.
– постоянная интегрирования.
В начальный момент времени система находилась в состоянии покоя, то есть скорость центра масс  Итак,
Итак, 
Из этого следует, что  , то есть, абсцисса центра масс, независимо от перемещения призм, остается постоянной.
, то есть, абсцисса центра масс, независимо от перемещения призм, остается постоянной.

Запишем выражение для определения координаты центра масс в начале движения:

где  – абсцисса центра масс призмы ,
– абсцисса центра масс призмы ,
 – абсцисса центра масс призмы .
– абсцисса центра масс призмы .
Выражение для определения координаты центра масс системы, когда призма опускается по боковой грани призмы к горизонтальной плоскости:

где  – новое значение абсциссы центра масс призмы ,
– новое значение абсциссы центра масс призмы ,
 – новое значение абсциссы центра масс призмы .
– новое значение абсциссы центра масс призмы .
Поскольку  , то
, то

или

Перепишем это уравнение следующим образом:

Найдем перемещение центров масс призм и :

Присутствие слагаемого ( ) в последнем уравнении учитывает перемещение призмы вместе с призмой слева на величину .
) в последнем уравнении учитывает перемещение призмы вместе с призмой слева на величину .
Подставим значение перемещений в уравнение (1):
 .
.
Решим это уравнение относительно , имея в виду, что  :
:

Ответ: 
Задача №4
Три груза (рис.6.4), весом  соединенные невесомой нитью, которая не растягивается, и которая перекинута через неподвижные блоки и
соединенные невесомой нитью, которая не растягивается, и которая перекинута через неподвижные блоки и  . Во время опускания груза 1 вниз груз 2 перемещается по верхнему основанию четырехугольной усеченной пирамиды
. Во время опускания груза 1 вниз груз 2 перемещается по верхнему основанию четырехугольной усеченной пирамиды  весом
весом  справа, а груз 3 поднимается по боковой грани вверх. Пренебрегая трением между срезанной пирамидой и полом, определить перемещение
справа, а груз 3 поднимается по боковой грани вверх. Пренебрегая трением между срезанной пирамидой и полом, определить перемещение  усеченной пирамиды относительно пола, если груз опустится на
усеченной пирамиды относительно пола, если груз опустится на 
Решение. Изобразим все внешние силы, которые приложены к материальной системе, состоящей из пирамиды и трех грузов (рис.6.4). Внешними силами являются: – сила тяжести пирамиды;  – силы тяжести грузов; – нормальная реакций
– силы тяжести грузов; – нормальная реакций

горизонтальной плоскости. Направим ось по горизонтали справа и запишем теорему о движении центра масс системы материальных точек в проекции на эту ось:

Поскольку все внешние силы перпендикулярны оси , то 
Следовательно, 
тогда

В начальный момент времени система была в состоянии покоя, то есть  , поэтому
, поэтому 
Поскольку

то

Таким образом, абсцисса центра масс системы не зависит от перемещений грузов, входящих в систему, и остается неизменной относительно неподвижной системы координат  .
.
Запишем выражение для определения для начального момента времени, когда грузы находились в состоянии покоя:

где  – абсциссы центров масс пирамиды и грузов 1,2 и 3.
– абсциссы центров масс пирамиды и грузов 1,2 и 3.
Если груз 1 опустится на величину при неподвижной пирамиде, то координата  при этом не изменится. Тогда груз 2 переместится вправо на величину и координата его центра масс будет равна
при этом не изменится. Тогда груз 2 переместится вправо на величину и координата его центра масс будет равна  . Груз 3 тоже подвинется по наклонной поверхности
. Груз 3 тоже подвинется по наклонной поверхности  на величину , при этом по направлению оси его положение изменится на величину
на величину , при этом по направлению оси его положение изменится на величину  и координата центра масс будет
и координата центра масс будет  . То есть, относительно пирамиды центр масс системы изменит свое положение, но не изменит его относительно неподвижной системы координат, поскольку должен выполняться закон сохранения движения центра масс. И тогда пирамида должна переместиться налево на некоторую величину
. То есть, относительно пирамиды центр масс системы изменит свое положение, но не изменит его относительно неподвижной системы координат, поскольку должен выполняться закон сохранения движения центра масс. И тогда пирамида должна переместиться налево на некоторую величину  .
.
Грузы 1,2 и 3 вместе с пирамидой также переместятся влево на расстояние  , и новые координаты всех центров масс будут равны:
, и новые координаты всех центров масс будут равны:

Запишем выражение для определения положения абсциссы центра масс для нового положения системы:

Поскольку  то
то

После приведения подобных получим:

или

Окончательно

После подстановки числовых величин, получим:

Ответ: 
Задача № 5
Электрический двигатель весом с горизонтальным валом без всяких креплений установлен на гладком горизонтальном фундаменте.
На валу электродвигателя (рис.6.5) под прямым углом закреплен одним концом однородный стержень  длиной
длиной  и весом , на второй конец стержня насажен точечный груз весом
и весом , на второй конец стержня насажен точечный груз весом  ; угловая скорость вала равна .
; угловая скорость вала равна .
Определить:
Закон горизонтального движения электродвигателя;
Угловую скорость вала электродвигателя, при которой электродвигатель будет «подскакивать» над фундаментом;
Наибольшее горизонтальное усилие  , которое действует на болты, если ими закреплен корпус электродвигателя на фундаменте.
, которое действует на болты, если ими закреплен корпус электродвигателя на фундаменте.
Решение. Будем рассматривать электромотор, стержень и груз как одну механическую систему. Внешними силами, которые действуют на эту систему, являются: сила тяжести электродвигателя  , сила тяжести стержня
, сила тяжести стержня  , сила тяжести груза
, сила тяжести груза  , а также реакции фундамента
, а также реакции фундамента  и
и  . Все эти силы вертикальны.
. Все эти силы вертикальны.

Начало неподвижной системы координат возьмем в точке , соответствующей положению центра вала электродвигателя, когда стержень направлен вертикально вверх (рис.6.5, а).
Поскольку проекция на ось главного вектора действующих на систему внешних сил равна нулю, то дифференциальное уравнение движения центра масс системы вдоль оси имеет вид:

где – масса системы.
В нашем случае  или
или

Тогда дифференциальное уравнение движения центра масс (1) приводится к виду:

откуда 
Предполагая, что в начальный момент скорость центра масс системы равна нулю, то есть, при пуске электродвигателя он был неподвижным, получим 
Следовательно,  , то есть, центр масс системы не перемещается вдоль оси .
, то есть, центр масс системы не перемещается вдоль оси .
Поскольку в начальный момент времени центр масс системы находится на оси (то есть,  ), то и в любой момент времени
), то и в любой момент времени 
При вращении стержня координаты центров масс электрического двигателя, стержня и груза будут варьироваться.
Предположим, что в некоторый момент времени координата центра масс мотора станет равной , тогда координаты центров масс стержня и груза будут равны  и
и  (рис.6.5,b).
(рис.6.5,b).
Поскольку все время  , то
, то

где  На рисунке 6.5,b показан момент, когда координата отрицательна.
На рисунке 6.5,b показан момент, когда координата отрицательна.
Тогда

откуда

и, следовательно:

Таким образом, центр электродвигателя совершает гармонические колебания вдоль оси с амплитудой, равной:

и периодом

Определим угловую скорость вала, при которой электродвигатель будет «подскакивать» над фундаментом.
Для этого составим дифференциальное уравнение движения центра масс системы вдоль оси :

или

где  – суммарная реакция фундамента.
– суммарная реакция фундамента.
Значение найдем из выражения для координаты центра масс:

поскольку

Последнее уравнение перепишем в виде:

Возьмем из обеих частей равенства вторую производную по времени

Из уравнений (2) и (3) вытекает, что

итак,

Минимальное значение реакции фундамента будет при  :
:

Если  , то это значит, что электромотор не прижимается к фундаменту. Итак, искомое значение угловой скорости, при которой электродвигатель начинает “подскакивать” над фундаментом, найдем из условия
, то это значит, что электромотор не прижимается к фундаменту. Итак, искомое значение угловой скорости, при которой электродвигатель начинает “подскакивать” над фундаментом, найдем из условия

откуда

В завершение определим наибольшее горизонтальное усилие  , которое действует на болты, если ими будет закреплен корпус электродвигателя на фундаменте.
, которое действует на болты, если ими будет закреплен корпус электродвигателя на фундаменте.
На рис.6.5 штрих-пунктирными линиями показаны оси болтов и горизонтальные реакции болтов  и
и  .
.
В этом случае дифференциальное уравнение движения центра масс системы вдоль оси будет:

Значение найдем по формуле:

или

Тогда

При этом уравнение (4) принимает вид:

Из последнего уравнения выходит:

Таким образом, максимальное горизонтальное усилие, действующее на болты, будет при  :
:

Ответ:

Задачи, которые рекомендуются для самостоятельной работы: 35.1; 35.6; 35.10; 35.20 [2].
Теорема об изменении количества движения точки и механической системы
Теорема об изменении количества движения (импульса) системы — одна из общих теорем динамики, является следствием законов Ньютона. Связывает количество движения с импульсом внешних сил, действующих на тела, составляющие систему.
Импульс силы
Для характеристики действия силы за некоторый промежуток времени вводится понятие импульса силы.
Если сила – постоянная, то импульс силы  равен
равен

Направление импульса силы совпадает с направлением .
Единица измерения импульса в системе СИ –  , в системе МкГс –
, в системе МкГс –  .
.
Если сила переменная, то импульс силы за конечный промежуток времени  определяется как интеграл:
определяется как интеграл:

Импульс силы – сложная физическая величина, которая одновременно учитывает влияние модуля, направления и времени действия силы на изменение состояния движения тела.
Модуль импульса силы можно определить через его проекции на оси координат:

где  – проекции силы;
– проекции силы;
 – проекции импульса на оси координат.
– проекции импульса на оси координат.
Углы между вектором и осями координат определяются из следующих соотношений:

Теорема об изменении количества движения точки и системы
Одной из мер движения точки является количество ее движения.
Количеством движения точки называется вектор  , который равен произведению массы точки на ее скорость
, который равен произведению массы точки на ее скорость  и направлен по вектору скорости:
и направлен по вектору скорости:
 .
.
Понятие количества движения было введено в механику Декартом и положено в основу механики Ньютоном.
Единица измерения количества движения в системе СИ –  , в системе МкГс –
, в системе МкГс –  .
.
Если спроектировать вектор количества движения на оси координат, то ее проекции определяются следующим образом:

Теорема об изменении количества движения точки в дифференциальной форме имеет вид:

Производная по времени от количества движения материальной точки равна геометрической сумме всех сил, действующих на эту точку.
Теорема об изменении количества движения точки в интегральной форме:

Изменение количества движения точки за некоторый промежуток времени равно геометрической сумме импульсов всех сил, которые приложены к точке.
Векторному уравнению (7.1) соответствуют три уравнения в проекциях на оси координат:

Большинство практических задач решается с использованием выражения (7.2).
Количеством движения механической системы называется векторная величина  , равная геометрической сумме (главному вектору) количеств движения всех точек этой системы.
, равная геометрической сумме (главному вектору) количеств движения всех точек этой системы.

Найти можно путем построения многоугольника количеств движения всех точек системы (рис.7.1).
Замыкающая сторона векторного многоугольника будет представлять собой вектор .
Величина может быть какой угодно, даже равняться нулю, когда многоугольник, построенный из векторов  , оказывается замкнутым.
, оказывается замкнутым.

Формулу (7.3) можно записать в виде:

где – масса всей системы;
 – скорость центра масс системы.
– скорость центра масс системы.
Из этой формулы следует, что количество движения системы равно нулю, когда скорость центра масс равна нулю. Например, если тело вращается вокруг неподвижной оси, которая проходит через его центр масс, то количество движения тела равно нулю.
В случае, когда колесо катится, вектор  характеризует только поступательную часть плоского движения колеса.
характеризует только поступательную часть плоского движения колеса.
Теорема об изменении количества движения системы в дифференциальной форме выразится формулой:

где  – главный вектор всех внешних сил, которые действуют на механическую систему.
– главный вектор всех внешних сил, которые действуют на механическую систему.
Производная по времени от количества движения механической системы равна геометрической сумме всех действующих на точки системы внешних сил.
В проекциях на оси координат уравнение (7.5) соответствует уравнениям:

В интегральной форме теорема об изменении количества движения системы имеет вид:

где  – количество движения системы в начальный момент времени.
– количество движения системы в начальный момент времени.
 – количество движения системы в конечный момент времени.
– количество движения системы в конечный момент времени.
Изменение количества движения механической системы за некоторый промежуток времени равно геометрической сумме импульсов внешних сил, которые действуют на систему за тот же промежуток времени.
Векторному уравнению (7.7) соответствуют три уравнения в проекциях на оси координат:

Практическая ценность теоремы заключается в том, что она позволяет исключить из рассматривания неизвестные внутренние силы.
Закон сохранения количества движения системы
Выводы из теоремы об изменении количества движения системы, которые еще имеют название законов сохранения количества движения:
1. Если главный вектор внешних сил, действующих на систему, равен нулю, то вектор количества движения системы не меняется:
если 
то  и
и 
2. Если сумма проекций внешних сил на какую-либо ось, например , равна нулю, то проекция количества движения системы на эту ось сохраняется постоянной:
если 
то  и
и 
Эти результаты выражают законы сохранения количества движения системы. Из них вытекает, что внутренние силы не могут изменить количество движения системы.
Порядок решения задач на применение теоремы об изменении количества движения точки и механической системы
Для материальной точки:
Изобразить на рисунке все силы, приложенные к материальной точке, то есть активные силы и реакции связей.
Выбрать систему координат.
Записать теорему об изменении количества движения точки в векторной форме.
Спроектировать это векторное уравнение на оси выбранной системы координат.
Решить полученные уравнения и определить искомые величины.
Для механической системы:
Изобразить на рисунке все внешние силы.
Выбрать систему координат.
Записать теорему об изменении количества движения системы в векторной форме.
Спроектировать это векторное уравнение на оси выбранной системы координат.
Решить полученные уравнения и определить искомые величины.
Примеры решения задач на тему: Теорема об изменении количества движения точки и механической системы
Задача № 1
Железнодорожный поезд движется по горизонтальному и прямолинейному участку пути (рис.7.2). Во время торможения до полной остановки развивается сила сопротивления, равная  веса поезда. В момент начала торможения скорость
веса поезда. В момент начала торможения скорость  поезда составляла 72 км/ч.
поезда составляла 72 км/ч.

Определить время и путь  торможения.
торможения.
Решение. Изобразим силы, действующие на поезд во время торможения: сила тяжести поезда , нормальная реакция пути , сила сопротивления , которая по величине равна 
Выберем систему координат. Поскольку движение прямолинейное и горизонтальное, достаточно рассмотреть движение по направлению оси .
Запишем теорему об изменении количества движения поезда (рассматривая его как материальную точку) в интегральной форме:

где – масса поезда,
 – конечная и начальная скорость поезда,
– конечная и начальная скорость поезда,
 – сумма импульсов сил , , которые действуют на поезд во время торможения.
– сумма импульсов сил , , которые действуют на поезд во время торможения.
Спроектируем векторное уравнение (1) на ось :

Проекции импульсов сил  и
и  на ось равны нулю, поскольку векторы и перпендикулярны оси.
на ось равны нулю, поскольку векторы и перпендикулярны оси.
Сила сопротивления во время торможения по величине не изменяется, следовательно, ее импульс равен:

Скорость в конце участка торможения равна нулю, то есть 
Окончательно, уравнение импульсов (2) в проекции на ось приобретет вид:

или

откуда

С учетом числовых значений величин  и
и  имеем:
имеем:

Путь торможения определим из формулы для равнопеременного движения:

В этом случае ускорение поезда определяется из формулы:

то есть,

Тогда

Ответ: 
Задача № 2
По шероховатой наклонной плоскости, которая составляет с горизонтом угол  , спускается тяжелое тело без начальной скорости.
, спускается тяжелое тело без начальной скорости.
Определить время  , за которое тело пройдет путь длиной
, за которое тело пройдет путь длиной  , если коэффициент трения
, если коэффициент трения  и
и  .
.
Решение. Во время движения на тело действуют сила тяжести тела  , нормальная реакция поверхности и сила трения , которая направлена в сторону, противоположную движению(рис.7.3).
, нормальная реакция поверхности и сила трения , которая направлена в сторону, противоположную движению(рис.7.3).

Направим ось вдоль наклонной поверхности вниз и запишем теорему об изменении количества движения в векторной форме:

Спроектируем ровность (1) на ось :

Проекция импульса нормальной реакции на ось равна нулю, поскольку сила перпендикулярна .
Учитывая, что во время движения сила тяжести и сила трения не меняются , то

Кроме того

Итак, уравнение импульса (2) примет вид:

Вычислим силу трения:

Тогда уравнение (3) примет вид:

или 
откуда

Поскольку

то

Используя полученную зависимость, сначала подсчитаем ускорение тела, а после этого – время движения.
Поскольку

то
 и
и 
Из формулы  , учитывая, что при
, учитывая, что при  получим
получим 
Из этой формулы находим время движения :

Ответ: 
Задача № 3
На полигоне пушка, которая наклонена под углом  к горизонту, делает выстрел в мишень. Сила тяжести ствола пушки –
к горизонту, делает выстрел в мишень. Сила тяжести ствола пушки – 
 Сила тяжести снаряда равна
Сила тяжести снаряда равна  Скорость снаряда у дульного среза
Скорость снаряда у дульного среза 
Определить скорость  свободного отката ствола пушки в момент вылета снаряда.
свободного отката ствола пушки в момент вылета снаряда.
Решение. В задаче рассматривается движение материальной системы, состоящей из ствола и снаряда (рис.7.4).

На систему действуют внешние силы: тяжести ствола  и тяжести снаряда
и тяжести снаряда  . Внутренние силы определяются давлением пороховых газов
. Внутренние силы определяются давлением пороховых газов  . Эти силы необходимо исключить из рассмотрения, согласно теореме о количестве движения механической системы.
. Эти силы необходимо исключить из рассмотрения, согласно теореме о количестве движения механической системы.
Применим теорему об изменении количества движения системы:

где  – количество движения системы в конечный момент времени;
– количество движения системы в конечный момент времени;
– количество движения системы в начальный момент времени;
 – сумма импульсов всех внешних сил (
– сумма импульсов всех внешних сил ( , ).
, ).
Ось направим перпендикулярно векторам внешних сил и .
Спроектируем уравнение (1) на ось :

Поскольку проекции сил и на ось равны нулю, то и проекции импульсов  и
и  также равны нулю. Итак:
также равны нулю. Итак:
 или
или 
Таким образом, проекция количества движения системы на ось в конечный момент времени равна проекции количества движения системы в начальный момент времени.
В начальный момент времени (до выстрела) снаряд и ствол были неподвижны, следовательно, их количества движения равнялись нулю и

В момент вылета снаряда проекция количества движения системы на ось равна:

или

Поскольку

то

откуда
 и
и 
С учетом числовых значений:

Знак минус показывает, что скорость ствола направлена в сторону, противоположную скорости снаряда.
Ответ: 
Задача № 4
Буксирный пароход весом  набрал скорость
набрал скорость  , после чего натянулся буксирный канат, и баржа весом
, после чего натянулся буксирный канат, и баржа весом  двинулась вслед за пароходом.
двинулась вслед за пароходом.
Определить общую скорость парохода и баржи  , считая, что движущая сила и сила сопротивления воды уравновешиваются, то есть, (
, считая, что движущая сила и сила сопротивления воды уравновешиваются, то есть, ( )
)  дв = соп (
дв = соп ( ).
).
Решение. Для определения скорости применим теорему об изменении количества движения системы.
На систему, которая состоит из парохода и баржи, действуют внешние силы: силы тяжести  и
и  , силы выталкивания
, силы выталкивания  и
и  , которые приложены к баржи и буксиру, а также движущая сила дв и сила сопротивления воды соп (рис.7.5).
, которые приложены к баржи и буксиру, а также движущая сила дв и сила сопротивления воды соп (рис.7.5).

Внутренняя сила – натяжение буксирного каната  – неизвестна.
– неизвестна.
Ось направим горизонтально, вправо.
Запишем теорему об изменении количества движения данной системы в интегральной форме:

где  – количество движения системы баржа-буксир в тот момент времени, когда они начинают двигаться с одинаковой скоростью;
– количество движения системы баржа-буксир в тот момент времени, когда они начинают двигаться с одинаковой скоростью;
– количество движения этой системы в начальный момент времени;
 – сумма импульсов всех внешних сил.
– сумма импульсов всех внешних сил.
Спроектируем уравнение (1) на ось :

Поскольку по условиям дв = соп, а направлены они в разные стороны, то

Кроме того, проекции на ось сил тяжести парохода и баржи, а также выталкивающих сил и , равны нулю. Следовательно, проекции импульсов этих сил на ось тоже равны нулю. Таким образом уравнение проекций принимает вид:
 или
или 
Подсчитаем количество движения парохода и баржи в начальный момент времени, когда скорость парохода равна  , а скорость баржи
, а скорость баржи  .
.

Совместимое движение парохода и баржи происходит с одинаковой скоростью , поэтому количество движения системы в это время

Поскольку

то 
Отсюда имеем

Ответ: 
Задача № 5
Механическая система состоит из грузов 1 и 2 массами  и
и  соответственно, а также прямоугольной вертикальной плиты 3 массой
соответственно, а также прямоугольной вертикальной плиты 3 массой  которая движется вдоль горизонтальных направляющих( рис.7.6). В момент времени
которая движется вдоль горизонтальных направляющих( рис.7.6). В момент времени  , когда скорость плиты
, когда скорость плиты  груз под действием внутренних сил начинают двигаться по желобам плиты. Груз 1 движется по дуге окружности с радиусом
груз под действием внутренних сил начинают двигаться по желобам плиты. Груз 1 движется по дуге окружности с радиусом  по закону
по закону  , где выражено в радианах, – в секундах (ось, от которой ведется положительное направление отсчета угла показано на рисунке). Груз 2 движется от точки прямолинейно по закону
, где выражено в радианах, – в секундах (ось, от которой ведется положительное направление отсчета угла показано на рисунке). Груз 2 движется от точки прямолинейно по закону  , где
, где  выражено в метрах, – в секундах (на рисунке груз 2 изображен в положении положительного отсчета координаты ), угол
выражено в метрах, – в секундах (на рисунке груз 2 изображен в положении положительного отсчета координаты ), угол  .
.
Определить зависимость  , то есть, скорость движения плиты как функцию времени, считая грузы материальными точками и пренебрегая всеми силами сопротивления движения.
, то есть, скорость движения плиты как функцию времени, считая грузы материальными точками и пренебрегая всеми силами сопротивления движения.
Решение. Рассмотрим механическую систему в произвольном положении (рис.7.6).
Изобразим все внешние силы, действующие на систему: силы тяжести , ,  и реакцию направляющей .
и реакцию направляющей .
Проведем координатные оси так, чтобы ось проходила через точку  , где находится центр масс плиты в начальный момент времени
, где находится центр масс плиты в начальный момент времени 
Определим  с помощью теоремы об изменении количества движения механической системы в проекции на ось .
с помощью теоремы об изменении количества движения механической системы в проекции на ось .
Поскольку все внешние силы, действующие на систему, вертикальны, то  и, согласно (7.10), имеем:
и, согласно (7.10), имеем:
 или
или  , (1)
, (1)
где  – проекция количества движения системы в момент времени
– проекция количества движения системы в момент времени 
 – проекция количества движения системы в произвольный момент времени .
– проекция количества движения системы в произвольный момент времени .
Определим количества движения  и
и  :
:

где 
Выразим координаты и через координату  .
.
С рис.7.6 видно, что в произвольный момент времени абсцисса первого груза

а абсцисса второго груза

Тогда


Подставляя полученные выражения для  и
и  в (3), получим:
в (3), получим:

Поскольку  то
то

В соответствии с (1), выражения (2) и (4) равны, то есть:

Отсюда окончательно получим:

Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 28.3; 28.7; 36.9; 36.11; 36.16 [2].
Теорема об изменении момента количества движения точки и механической системы
Наряду с количеством движения, как векторной меры поступательного движения, для вращательного движения можно ввести момент количества движения.
Для материальной точки массой , которая имеет скорость , момент количества движения  относительно любого центра определяется из выражения (рис.8.1):
относительно любого центра определяется из выражения (рис.8.1):


Вектор момента количества движения прикладывается в точке , относительно которой он вычисляется. Если спроектировать обе части уравнения (8.1) на оси декартовой системы координат, получим моменты количества движения точки относительно осей координат:

Кинетическим моментом  или главным моментом количества движения механической системы относительно данного центра называется вектор, равный геометрической сумме моментов количеств движения всех материальных точек системы относительно этого же центра:
или главным моментом количества движения механической системы относительно данного центра называется вектор, равный геометрической сумме моментов количеств движения всех материальных точек системы относительно этого же центра:

Подобно тому, как количество движения системы является характеристикой поступательного движения, кинетический момент является характеристикой вращательного движения системы.
Кинетический момент твердого тела, которое вращается относительно оси с угловой скоростью , равной произведению угловой скорости тела на его момент инерции относительно оси вращения:

Производная по времени от момента количества движения точки, взятого относительно любого неподвижного центра равна моменту силы, действующей на эту точку, относительно того же центра:

Спроектировав это уравнение на оси координат, получим:

Если рассматривать движение системы, на которую действуют внешние  и внутренние силы
и внутренние силы  , то производная по времени от кинетического момента механической системы относительно некоторого центра равна геометрической сумме моментов всех внешних сил относительно того же центра:
, то производная по времени от кинетического момента механической системы относительно некоторого центра равна геометрической сумме моментов всех внешних сил относительно того же центра:

Проектируя обе части уравнения на неподвижные оси  и учитывая, что проекция вектора, который изображает момент силы относительно точки на ось, равна моменту силы относительно этой оси, получим:
и учитывая, что проекция вектора, который изображает момент силы относительно точки на ось, равна моменту силы относительно этой оси, получим:

Теорема об изменении кинетического момента позволяет изучать вращательное движение твердого тела вокруг оси и точки, или вращательную часть движения тела в общем случае движения свободного твердого тела.
Практическая ценность теоремы заключается еще и в том, что она позволяет при изучении движения системы исключить из рассмотрения неизвестные внутренние силы.
Из теорем об изменении кинетического момента системы (8.7)-(8.8) вытекают важные выводы:
Если сумма моментов относительно центра всех внешних сил, действующих на систему, равна нулю, то кинетический момент системы относительно той же точки является постоянным по величине и направлению, то есть,
если  , то
, то  и
и 
Если сумма моментов всех внешних сил, действующих на систему, относительно некоторой оси, например , равна нулю, то проекция кинетического момента на эту же ось является постоянной по величине, то есть,
если  . то
. то  и
и 
Дифференциальное уравнение вращательного движения тела вокруг неподвижной оси
Кинетический момент тела относительно оси вращения по уравнению (8.4) , если ось является осью вращения тела, равен:

Следовательно,

Сумма моментов внешних сил  относительно оси вращения называется вращательным моментом и обозначается
относительно оси вращения называется вращательным моментом и обозначается

Таким образом, дифференциальное уравнение вращательного движения тела имеет вид:

Из (8.9) следует, что произведение момента инерции тела относительно оси вращения на угловое ускорение тела равно вращательному моменту

Это уравнение позволяет решать следующие задачи:
– если заданы уравнения вращения тела  и его момент инерции , то можно определить вращательный момент:
и его момент инерции , то можно определить вращательный момент:

– если заданы внешние силы, приложенные к телу, начальные условия вращения  и
и  , момент инерции тела, то можно найти уравнение вращения тела :
, момент инерции тела, то можно найти уравнение вращения тела :

– определить момент инерции тела относительно оси вращения, если известны величины  и
и  :
:

Из уравнения  вытекают отдельные случаи:
вытекают отдельные случаи:
1. Если  , то
, то  , а если
, а если  , то и
, то и  . В этом случае тело вращается равномерно.
. В этом случае тело вращается равномерно.
2. Если  , то
, то  , а если
, а если  то и
то и  . Итак, твердое тело вращается равнопеременно.
. Итак, твердое тело вращается равнопеременно.
Порядок решения задач на применение теоремы об изменении момента количества движения точки и механической системы
Задачи, которые относятся к этой теме, можно разделить на следующие четыре основных типа:
Вычисление кинетического момента.
Изучение движения конкретной точки механической системы, если эта точка участвует во вращательном движении системы.
Изучение вращательного движения твердого тела.
Изучение движения механической системы, в которую входят тела, совершающие как поступательные, так и вращательные движения.
Задачи первого типа могут быть решены с помощью общих формул (8.4), (8.5).
Порядок решения задач второго типа может быть следующим:
- Выбрать систему координат.
- Изобразить все внешние силы, приложенные к материальной точке; в случае произвольной точки к этим силам добавить реакции внешних связей.
- Записать в скалярной форме выражение теоремы об изменении момента количества движения точки.
- Высчитать сумму моментов сил, которые приложены к материальной точке.
- Определить количество движения материальной точки и его момент относительно осей.
- Подставить данные пунктов 4 и 5 в уравнения (8.6) теоремы об изменении момента количества движения материальной точки.
- Решить, в соответствии с условием, прямую или обратную задачу динамики точки.
При решении задач третьего типа сохранять рекомендации первых двух пунктов, а далее делать следующим образом:
- Записать дифференциальное уравнение вращательного движения тела вокруг неподвижной оси (8.9).

- Определить момент инерции твердого тела относительно неподвижной оси.
- Подсчитать сумму моментов всех внешних сил относительно оси вращения.
- Величины, полученные в п. п. 4 и 5, подставить в уравнение (8.9).
- Записать начальные условия.
- Решить уравнение п. 6 в зависимости от условия, как прямую или обратную задачу.

При решении задач четвертого типа необходимо предварительно расчленить заданную систему на отдельные твердые тела, и к каждому из них, в зависимости от характера движения, применить одну из теорем: об изменении количества движения – в случае поступательного движения тел расчлененной системы; об изменении кинетического момента – при наличии тел, которые совершают вращательные движения.
Примеры решения задач на тему: Теорема об изменении момента количества движения точки и механической системы
Задача №1
Однородный круглый диск весом  и с радиусом
и с радиусом  катится без скольжения по горизонтальной плоскости, делая вокруг собственной оси 60 об/мин (рис.8.2).
катится без скольжения по горизонтальной плоскости, делая вокруг собственной оси 60 об/мин (рис.8.2).

Определить главный момент количеств движения диска  относительно оси , которая проходит через центр диска перпендикулярно плоскости движения.
относительно оси , которая проходит через центр диска перпендикулярно плоскости движения.
Решение. Главный момент количеств движения системы (кинетический момент) относительно оси вращения равен (8.6):

где – момент инерции тела относительно оси вращения,
– угловая скорость вращения.
В данном случае кинетический момент относительно оси, проходящей через центр диска , равен:


Ответ: 
Задача №2
Во время вращения барабана 1 весом и радиусом  вокруг неподвижной оси на его боковую поверхность наматывается невесомая и нерастяжимая нить, что вызывает движение груза 2 весом , который скользит по неподвижной гладкой горизонтальной плоскости (рис.8.3).
вокруг неподвижной оси на его боковую поверхность наматывается невесомая и нерастяжимая нить, что вызывает движение груза 2 весом , который скользит по неподвижной гладкой горизонтальной плоскости (рис.8.3).

Определить главный момент количества движения (кинетический момент) системы относительно оси и выразить его как зависимость от угловой скорости. Барабан считать однородным круглым цилиндром. Ось направлена перпендикулярно рисунку.
Решение. В состав механической системы входят два твердых тела: барабан 1 и груз 2.
Следовательно, кинетический момент системы равен:

где  – кинетический момент барабана;
– кинетический момент барабана;
 – кинетический момент груза относительно неподвижной оси .
– кинетический момент груза относительно неподвижной оси .
Кинетический момент барабана равен (8.5):

где

тогда

Главный момент количества движения груза, который движется поступательно, определяется как момент количества движения материальной точки, то есть:

поскольку

то

Окончательно

Ответ: 
Задача №3
Шарик , который находится в сосуде с жидкостью и прикреплен к концу стержня длиной , приводится в вращение вокруг вертикальной оси  с начальной угловой скоростью
с начальной угловой скоростью  (рис.8.4, а). Сила сопротивления жидкости пропорциональна угловой скорости вращения
(рис.8.4, а). Сила сопротивления жидкости пропорциональна угловой скорости вращения  :
:  , где – масса шарика, – коэффициент пропорциональности.
, где – масса шарика, – коэффициент пропорциональности.

Определить, через какой промежуток времени угловая скорость вращения станет вдвое меньше начальной, а также число оборотов , которое сделает стержень с шариком за этот промежуток времени. Массу шарика считать сосредоточенной в ее центре, массой стержня пренебречь.
Решение. Ось направим вдоль оси вращения и покажем силы, действующие на вал с шариком: силу сопротивления , которая направлена в сторону, противоположную вращению (рис.8.4, б), силу тяжести шарика , реакции  подшипника
подшипника  и
и  подпятника
подпятника  .
.
Все силы указаны на рисунках, направления сил и изображены произвольно.
Запишем дифференциальное уравнение вращательного движения шарика относительно оси :

где момент инерции шарика

Поскольку момент силы тяжести относительно оси равен нулю ( параллельна оси ), то вращательный момент  равен моменту силы сопротивления относительно оси (как известно, момент силы сопротивления всегда отрицательный):
равен моменту силы сопротивления относительно оси (как известно, момент силы сопротивления всегда отрицательный):

Следовательно, дифференциальное уравнение вращательного движения имеет вид:

или

Разделим переменные и проинтегрируем:

Произвольную постоянную определим по начальным условиям: при  .
.

Следовательно,

Высчитаем, через какой промежуток времени угловая скорость вращения станет вдвое меньше начальной, то есть,  .
.

Откуда:

Для определения числа оборотов, которые сделает стержень с шариком за промежуток времени , необходимо найти зависимость угла поворота от времени :

Следовательно,

Разделим переменные и проинтегрируем это дифференциальное уравнение:

Произвольную постоянную  определим по начальным условиям: при
определим по начальным условиям: при  .
.

Итак закон изменения угла поворота по времени имеет вид:

или

При  , угол поворота
, угол поворота  равен
равен

Поскольку за 1 оборот шарик обернется на  , то количество оборотов составит
, то количество оборотов составит

Ответ: 
Задача №4
Для определения момента трения в цапфах, на вал насажен маховик весом  , радиус инерции маховика
, радиус инерции маховика  Маховику придана угловая скорость, соответствующая
Маховику придана угловая скорость, соответствующая  об/мин. Без внешнего воздействия на него, он остановился через
об/мин. Без внешнего воздействия на него, он остановился через  мин.
мин.
Определить момент трения  , считая его постоянным.
, считая его постоянным.
Решение. Направим ось вдоль неподвижной оси вращения. Изобразим на рис.8.5 внешние нагрузки, действующие на вал и маховик: силу тяжести маховика , реакции опор  и и момент сил трения .
и и момент сил трения .
Запишем теорему об изменении кинетического момента относительно оси вращения:

Поскольку мы рассматриваем вращение твердого тела, то

Найдем вращательный момент внешних сил относительно оси вращения , если учтем, что момент сил , и относительно оси равны нулю, поскольку эти силы пересекают ось. Следовательно, вращательный момент равен моменту сил трения и направлен в сторону, противоположную вращению маховика.
Таким образом

Высчитаем величины, которые входят в это уравнение:

где – угловая скорость маховика в момент остановки,  ,
,
 – угловая скорость в начальный момент времени.
– угловая скорость в начальный момент времени.
Поскольку  то
то 
С учетом значений и  получим:
получим:

Ответ: 
Задача №5
Однородный цилиндр (рис.8.6) радиусом вращается вокруг своей геометрической оси  угловой скоростью
угловой скоростью  .
.

Определить, как изменится угловая скорость  цилиндра, если ось вращения перейдет в положение , которое совпадает с образующей цилиндра?
цилиндра, если ось вращения перейдет в положение , которое совпадает с образующей цилиндра?
Решение. На цилиндр действует сила тяжести , которая направлена вертикально вниз.
Запишем теорему об изменении кинетического момента цилиндра:

где  – момент инерции цилиндра,
– момент инерции цилиндра,
 – сумма моментов внешних сил относительно оси вращения.
– сумма моментов внешних сил относительно оси вращения.
Поскольку сила параллельна оси вращения, то
 и
и 
Итак,  , тогда
, тогда

где  – момент инерции цилиндра относительно оси ,
– момент инерции цилиндра относительно оси ,
 – момент инерции цилиндра относительно оси ,
– момент инерции цилиндра относительно оси ,
По теореме Гюйгенса-Штейнера

где – масса цилиндра.
Из формулы (1) получим:

Вычислим и :

Следовательно,

Угловая скорость уменьшилась в три раза, поскольку в три раза увеличился момент инерции.
Ответ: 
Задача №6
Молотильный барабан начинает вращаться из состояния покоя ( ) под действием постоянного момента
) под действием постоянного момента 
Определить, пренебрегая трением, частоту вращения барабана после того, как он начнет вращаться и сделает  оборотов (рис.8.7), зная, что момент инерции барабана относительно оси вращения
оборотов (рис.8.7), зная, что момент инерции барабана относительно оси вращения 

Решение. Для определения угловой скорости барабана воспользуемся формулой:

где – начальная угловая скорость вращения,
– конечная угловая скорость вращения,
– угол, на который поворачивается барабан.
Из (1) вытекает:
 где
где 
Следовательно,

Таким образом, для определения угловой скорости необходимо знать угловое ускорение  .
.
Для определения воспользуемся теоремой об изменении кинетического момента:

где  – сумма моментов всех внешних сил относительно оси вращения.
– сумма моментов всех внешних сил относительно оси вращения.
На барабан действуют следующие внешние нагрузки: – сила тяжести барабана;  ,
,
 – реакции подшипников и ; – вращательный момент.
– реакции подшипников и ; – вращательный момент.
С учетом действующих сил уравнение (2) будет иметь вид:

При этом  , поскольку силы , и
, поскольку силы , и
пересекают ось и моментов не образуют. Итак,

Тогда,

Ответ: 
Задача №7
Груз весом  подвешен на канате, который навитый на цилиндрический барабан, ось вращения которого горизонтальна (рис.8.8).
подвешен на канате, который навитый на цилиндрический барабан, ось вращения которого горизонтальна (рис.8.8).

Определить угловое ускорение барабана во время опускания груза , пренебрегая весом каната, сопротивлением воздуха, трением в подшипниках. Барабан считать однородным цилиндром весом  и радиусом
и радиусом 
Решение. Для определения углового ускорения барабана будем рассматривать движение системы, в которую включим следующие тела: барабан весом , груз весом и канат, натяжение которого заранее неизвестно.
Если применить теорему об изменении кинетического момента системы относительно оси, то натяжение каната, являющегося внутренней силой, в уравнение не войдет.
Относительно оси, которая проходит через точку , эта теорема имеет вид:

На систему действуют следующие внешние силы: – вес груза, – вес барабана, – реакция опоры .
Силы и не создают моментов относительно оси , потому что они ее пересекают. Только сила создает момент относительно оси , который равен:

Итак,

Определим кинетический момент системы относительно оси вращения :

где  – кинетический момент барабана,
– кинетический момент барабана,
 – кинетический момент груза.
– кинетический момент груза.

где  – момент инерции барабана относительно оси вращения ;
– момент инерции барабана относительно оси вращения ;

поскольку 
Тогда кинетический момент системы равен:

Подставим полученные результаты в уравнение (1):

Знак момента силы взят положительным, поскольку направление вращения барабана совпадает с направлением момента силы .
Решаем уравнение (2) и определяем угловое ускорение .
Выносим из под знака дифференциала в левой части уравнения (2) постоянные величины:

или

С учетом числовых значений угловое ускорение равно:

Ответ: 
Теорема об изменении кинетической энергии механической системы
Теорема о кинетической энергии системы — одна из общих теорем динамики, является следствием законов Ньютона. Связывает кинетическую энергию механической системы с работой сил, действующих на тела, составляющие систему.
Кинетическая энергия механической системы
Кинетической энергией материальной точки называется скалярная положительная величина, равная половине произведения массы точки на квадрат ее скорости:

Кинетической энергией механической системы называется арифметическая сумма кинетических энергий всех точек механической системы:

Кинетическая энергия системы не зависит от направлений скоростей точек.
Кинетическая энергия может равняться нулю, если скорости всех точек системы равны нулю.
Кинетическая энергия системы характеризует и поступательное, и вращательное движения системы. Поэтому теоремой об изменении кинетической энергии особенно часто пользуются при решении задач.
Единицей кинетической энергии в системе СИ является Джоуль (Дж).
Определение кинетической энергии твердого тела в различных случаях его движения
Поступательное движение твердого тела:
При поступательном движении твердого тела скорости всех его точек (в том числе скорость центра масс тела) в каждый момент времени равны между собой; то есть, для любой точки  . Итак
. Итак

Кинетическая энергия твердого тела при поступательном движении равна половине произведения массы тела на квадрат скорости его центра масс.
Вращательное движение твердого тела:
Скорость любой точки твердого тела, которое вращается с угловой скоростью , равна

где  – расстояние от точки к оси вращения.
– расстояние от точки к оси вращения.
Тогда кинетическая энергия тела определяется согласно зависимости:

Поскольку

то

Следовательно кинетическая энергия тела при вращательном движении равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости тела.
Плоскопараллельное движение твердого тела:
При плоскопараллельном движении скорости всех точек тела в каждый момент времени распределены так, будто тело вращается вокруг оси, которая перпендикулярна плоскости движения и которая проходит через мгновенный центр скоростей .
В этом случае кинетическую энергию тела можно определить по формуле:

где  – момент инерции тела относительно оси, которая проходит через мгновенный центр скоростей.
– момент инерции тела относительно оси, которая проходит через мгновенный центр скоростей.
Поскольку (согласно теореме Штейнера-Гюйгенса)

где  – момент инерции относительно оси, которая проходит через центр масс тела и параллельна мгновенной оси вращения, то
– момент инерции относительно оси, которая проходит через центр масс тела и параллельна мгновенной оси вращения, то

Поскольку  , то окончательно
, то окончательно

Таким образом,
в случае плоскопараллельного движения тела кинетическая энергия состоит из кинетических энергий поступательного движения вместе со скоростью центра масс и вращательного движения вокруг оси, которая проходит через центр масс перпендикулярно плоскости движения.
Теорема об изменении кинетической энергии механической системы:
Дифференциальная форма:
Дифференциал кинетической энергии механической системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему:

Производная по времени от кинетической энергии механической системы равна сумме мощностей всех внешних и внутренних сил, действующих на систему:

Интегральная форма:
Изменение кинетической энергии механической системы при конечном перемещении ее из положения (1) в положение (2) равно сумме работ на этом перемещении всех внешних и внутренних сил, действующих на эту систему

Если механическая система неизменна, то сумма работ внутренних сил равна нулю и теорема запишется так:

Порядок решения задач на использование теоремы об изменении кинетической энергии механической системы
Решение задач с помощью теоремы об изменении кинетической энергии в интегральной форме рекомендуется проводить в следующей последовательности:
а) изобразить на рисунке все внешние силы системы;
б) высчитать сумму работ всех внешних сил на перемещении точек системы;
в) вычислить кинетическую энергию системы материальных точек в начальном и конечном ее состояниях;
г ) пользуясь результатами подсчетов по пунктам б) и в) записать теорему об изменении кинетической энергии механической системы и определить искомую величину.
Примеры решения задач на тему: Теорема об изменении кинетической энергии механической системы
Задача № 1
Механизм эллипсографа (рис.10.1) состоит из ползунов и весом каждый, кривошипа  весом
весом  , и линейки весом
, и линейки весом  . Кривошип
. Кривошип  вращается вокруг неподвижной оси , которая перпендикулярна плоскости чертежа с угловой скоростью .
вращается вокруг неподвижной оси , которая перпендикулярна плоскости чертежа с угловой скоростью .
Определить кинетическую энергию механизма эллипсографа, полагая, что линейка и кривошип – однородные тонкие стержни, а ползуны и – материальные точки, а также, что 

Решение. Заданная механическая система состоит из четырех тел: кривошипа 1 и линейки 2, ползунов 3 и 4.
Кинетическая энергия всей системы равна:

где  – кинетическая энергия кривошипа 1,
– кинетическая энергия кривошипа 1,
 – кинетическая энергия линейки 2,
– кинетическая энергия линейки 2,
 – кинетическая энергия ползунов 3 и 4.
– кинетическая энергия ползунов 3 и 4.
Кривошип совершает вращательное движение вокруг неподвижной оси , которая перпендикулярна оси рисунка. В этом случае кинетическая энергия тела равна

Тогда

Линейка 2 движется плоскопараллельно. Ее кинетическая энергия равна

где  – скорость точки С, которая является центром масс линейки 2,
– скорость точки С, которая является центром масс линейки 2,
 – угловая скорость линейки 2,
– угловая скорость линейки 2,
 – момент инерции линейки относительно оси
– момент инерции линейки относительно оси  , которая проходит через центр масс линейки .
, которая проходит через центр масс линейки .
Для определения угловой скорости линейки 2 используем понятие мгновенного центра скоростей. Как известно, мгновенный центр скоростей находится на пересечении перпендикуляров к скоростям двух точек тела, движущихся плоскопараллельно. Тогда в нашем случае он будет расположен в точке , и скорость точки определится:

С другой стороны, точка принадлежит звену 1, и ее скорость равна

Тогда, учитывая, что  получим:
получим:

Момент инерции линейки относительно оси равен:

С учетом полученных значений  кинетическая энергия линейки 2 равна:
кинетическая энергия линейки 2 равна:

Подсчитаем кинетическую энергию ползунов 3 и 4, которые двигаются поступательно:
 .
.
Скорости точек можно определить, учитывая положение мгновенного центра скоростей линейки 2:

Тогда

Подставляя найденные выражения (2), (4), (5) в (1), получим:

Ответ: 
Задача № 2
На рисунке 10.2 изображен подъемный механизм лебедки. Груз весом поднимается с помощью невесомого и нерастяжимого троса, который переброшен через блок и намотан на барабан радиусом и весом . К барабану приложен вращательный момент, который пропорционален квадрату угла поворота барабану:

где – постоянный коэффициент.

Определить скорость груза в момент, когда он поднимется на высоту . Массу барабана считать равномерно распределенной вдоль его обода. Блок – сплошной диск весом  . В начальный момент система находилась в покое.
. В начальный момент система находилась в покое.
Решение. Изобразим на рисунке все внешние силы, действующие на барабан , блок и груз : силы тяжести , , ; вращательный момент, а также реакции шарниров  и
и  . Внутренней силой является натяжение троса
. Внутренней силой является натяжение троса  .
.
Запишем теорему об изменении кинетической энергии системы:

где  – кинетическая энергия системы в конечном положении;
– кинетическая энергия системы в конечном положении;
 – кинетическая энергия системы в исходном положении;
– кинетическая энергия системы в исходном положении;
 – сумма работ всех внешних сил на перемещении ;
– сумма работ всех внешних сил на перемещении ;
 – сумма работ всех внутренних сил на перемещении .
– сумма работ всех внутренних сил на перемещении .
Поскольку в начальный момент времени система находилась в состоянии покоя, то

В связи с тем, что трос не растягивается и при движении системы находится в натянутом состоянии, сумма работ внутренних сил системы равна нулю, следовательно

При поднятии груза на высоту сумма работ равна:

Поскольку точки приложения сил  и
и  – неподвижны, то
– неподвижны, то

Работа силы равна:

Работа вращательного момента в случае, когда он не меняется

где – угол поворота тела под действием момента.
Поскольку в нашем случае вращательный момент меняется, то его работа определится следующим образом:

Определим угол , на который вернулся барабан при подъеме груза на высоту :

Следовательно,

Таким образом,

Перейдем к подсчету кинетической энергии системы в конечном положении:

где  – кинетическая энергия груза ;
– кинетическая энергия груза ;
 – кинетическая энергия диска ;
– кинетическая энергия диска ;
 – кинетическая энергия барабана .
– кинетическая энергия барабана .
Груз движется поступательно и его кинетическая энергия равна:

Диск совершает вращательное движение, его кинетическая энергия определяется из выражения:
где  – момент инерции диска относительно оси вращения;
– момент инерции диска относительно оси вращения;
 – угловая скорость диска.
– угловая скорость диска.
Поскольку диск – сплошной, то равен:

где  – радиус диска.
– радиус диска.
Поскольку линейная скорость обода диска равна скорости груза, угловая скорость вращения  :
:

Итак,

Кинетическая энергия барабана , поскольку он совершает вращательное движение, равна:

Поскольку масса барабана распределена по ободу, то:

Угловую скорость барабана высчитаем из условия равенства линейных скоростей на ободах диска и барабана:

Откуда

Таким образом

Кинетическая энергия системы в конечном положении равна

Итак, теорема об изменении кинетической энергии системы имеет вид:

Решая это уравнение относительно  , находим скорость груза после того, как он пройдет путь :
, находим скорость груза после того, как он пройдет путь :

Ответ: 
Задача № 3
Груз (рис.10.3) весом , опускаясь вниз с помощью перекинутого через неподвижный блок невесомого и нерастяжимого троса, поднимает вверх груз весом , который закреплен к оси подвижного блока . Блоки и считать однородными сплошными дисками весом каждый.

Определить скорость груза в момент, когда он опустится на высоту . Скольжением на ободах блоков и силами сопротивления пренебречь.
В начальный момент система находилась в состоянии покоя.
Решение. Изобразим внешние силы, которые действуют на систему: силы тяжести  ; реакцию шарнира
; реакцию шарнира  и реакцию в точке –
и реакцию в точке –  . Внутренней силой является натяжение троса .
. Внутренней силой является натяжение троса .
Запишем теорему об изменении кинетической энергии системы:

В начальный момент времени система находилась в покое, следовательно,  . Работа внутренней силы натяжения троса, равна нулю. Итак,
. Работа внутренней силы натяжения троса, равна нулю. Итак,

Сумма работ внешних сил при перемещении системы в конечное положение составляет:

Работа сил  равна нулю, поскольку точки приложения сил 3
равна нулю, поскольку точки приложения сил 3  неподвижны.
неподвижны.
Итак,

Работа силы при опускании груза на высоту равна:

Работу силы тяжести блока определим следующим образом. При опускании груза на высоту точка  блока поднимается вверх на расстояние
блока поднимается вверх на расстояние  , которая равна , а центр блока на величину
, которая равна , а центр блока на величину  , так как точка – мгновенный центр скоростей блока .
, так как точка – мгновенный центр скоростей блока .
Таким образом,

Груз поднимается вверх так же на величину  . Тогда работа силы тяжести груза будет равна:
. Тогда работа силы тяжести груза будет равна:

Итак,

Вычислим кинетическую энергию системы в конечном положении:

Груз перемещается поступательно и его кинетическая энергия равна

где  – скорость груза в конце перемещения.
– скорость груза в конце перемещения.
Блок осуществляет плоскопараллельное движение. В этом случае:

Кинетическая энергия поступательного движения блока равна:

Поскольку точка – мгновенный центр скоростей блока , а скорость точки равна скорости груза , то скорость вращения блока :

Тогда

Таким образом,

Кинетическая энергия вращательного движения блока определяется из равенства:

где  – момент инерции блока относительно оси, которая проходит через центр масс . Блок – сплошной однородный диск, поэтому
– момент инерции блока относительно оси, которая проходит через центр масс . Блок – сплошной однородный диск, поэтому

Тогда

Таким образом, кинетическая энергия блока равна:

Блок совершает вращательное движение и его кинетическая энергия:

то есть

Груз совершает поступательное движение со скоростью точки то есть со скоростью  . Поэтому
. Поэтому

Следовательно, кинетическая энергия системы  в конечном положении:
в конечном положении:

Таким образом, теорема об изменении кинетической энергии системы имеет вид:

Находим скорость груза , решая это уравнение относительно  :
:

Ответ: 
Задача № 4
Прямоугольная пластинка  (рис.10.4) со сторонами и , и весом вращается вокруг вертикальной оси с начальной угловой скоростью . Каждый элемент пластинки несет при этом сопротивление воздуха, направление которого перпендикулярно плоскости пластинки, а величина пропорциональна площади элемента и квадрату его скорости. Коэффициент пропорциональности равен
(рис.10.4) со сторонами и , и весом вращается вокруг вертикальной оси с начальной угловой скоростью . Каждый элемент пластинки несет при этом сопротивление воздуха, направление которого перпендикулярно плоскости пластинки, а величина пропорциональна площади элемента и квадрату его скорости. Коэффициент пропорциональности равен  .
.

Определить, сколько оборотов сделает пластинка к тому мгновению, когда ее угловая скорость станет вдвое меньше начальной?
Решение. Поскольку силы сопротивления, приложенные к пластинке, не постоянные, а зависят от скорости, то для решения задачи воспользуемся теоремой об изменении кинетической энергии системы в дифференциальной форме:

Высчитаем дифференциал кинетической энергии пластинки. Поскольку пластинка вращается вокруг неподвижной оси, то ее кинетическая энергия равна:

откуда:

где – момент инерции пластинки относительно оси .
Перейдем к определению суммы элементарных работ внешних сил, которые действуют на пластинку. Это такие силы (рис.10.4):
– сила тяжести пластинки ;
– реакции в опорах и  :
:  и
и  ;
;
– сила сопротивления воздуха .
Итак,

где  – элементарная работа силы тяжести пластинки;
– элементарная работа силы тяжести пластинки;
 – элементарные работы реакций подшипников;
– элементарные работы реакций подшипников;
 – элементарная работа силы сопротивления .
– элементарная работа силы сопротивления .
Работы реакций и равны нулю, ибо точки их приложения неподвижны. Работа силы тяжести тоже равна нулю в связи с тем, что высота центра тяжести пластинки не меняется.
Таким образом,

Для вычета работы сил сопротивления воспользуемся формулой для работы сил, которые приложены к вращающемуся твердому телу:

где  – сумма моментов всех приложенных к телу сил относительно оси вращения;
– сумма моментов всех приложенных к телу сил относительно оси вращения;
 – элементарный угол поворота.
– элементарный угол поворота.
Чтобы определить , разобьем пластинку на элементарные прямоугольники со сторонами и  . Тогда сила сопротивления, приложенная к элементарному прямоугольнику, будет равняться:
. Тогда сила сопротивления, приложенная к элементарному прямоугольнику, будет равняться:

и

Следовательно,

или

и
 .
.
Таким образом, уравнение (1) принимает вид:

Разделим переменные и проинтегрируем:

Момент инерции пластинки составляет:

Тогда

Откуда находим:

Число оборотов составляет:

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
