Построение механической характеристики асинхронного двигателя
 Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики.
Для оценки свойств асинхронного двигателя прибегают к построению механической характеристики.
Механическая характеристика асинхронного двигателя выражает зависимость между электромагнитным моментом и частотой вращения, либо скольжением. Скольжение – это величина, которая показывает, насколько частота вращения магнитного поля опережает частоту вращения ротора.
Благодаря механической характеристике, появляется возможность определить к какому типу установки больше подходит двигатель, на каком участке сохраняется его устойчивая работа, перегрузочную способность и другое.
Построим механическую характеристику для двигателя 4A90L4У3.
Паспортные данные двигателя:
n1 = 1500 об/мин
Pн = 2.2 КВт
nн = 1425 об/мин
η = 80 %
cos φ = 0.83
Mmax/Mн = λ = 2,2
Для построения нам необходимо произвести расчет номинального момента и скольжения.
Рассчитаем критическое скольжение и момент, для этого необходимо знать коэффициент λ.
Итак, мы определили основные точки характеристики, но для её построения их недостаточно. Поэтому с помощью упрощенной формулы Клосса, рассчитаем моменты для других значений скольжений.
Упрощенная формула Клосса выглядит следующим образом
Для удобства составим таблицу.
|
s |
0 |
sн | sкр/2 | sкр |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
0.9 |
1 |
|
M |
0 |
14.61 |
25.94 |
32.43 |
32,39 |
30.47 |
26.69 |
23.16 |
20.22 |
17.85 |
15.93 |
14.35 |
13.05 |
|
n |
1500 |
1425 |
1342.5 |
1185 |
1200 |
1050 |
900 |
750 |
600 |
450 |
300 |
150 |
0 |
Рассчитаем для каждого значения скольжения момент и частоту вращения. Например, для значения 0.2

Частоту вращения выразим из формулы для определения скольжения

Подобным образом рассчитываются остальные значения.
Так как формула упрощенная, значения могут несколько отличаться от действительных, что не критично для расчетов.
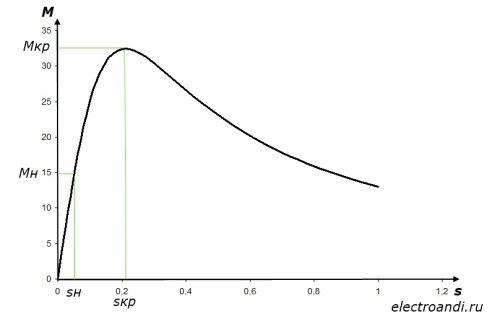
Теперь на основании расчетов мы можем построить саму механическую характеристику.
Зависимость момента от скольжения M = f(s)
Зависимость частоты оборотов от момента n = f(M)

Рекомендуем – механическая характеристика электропривода
38)
Механическая характеристика асинхронного
двигателя.
Механическая
характеристика.
Зависимость частоты вращения ротора
от нагрузки (вращающегося момента на
валу) называется механической
характеристикой асинхронного двигателя
(рис. 262, а). При номинальной нагрузке
частота вращения для различных двигателей
обычно составляет 98—92,5 % частоты вращения
n1
(скольжение sном
= 2 – 7,5 %). Чем больше нагрузка, т. е.
вращающий момент, который должен
развивать двигатель, тем меньше частота
вращения ротора. Как показывает кривая
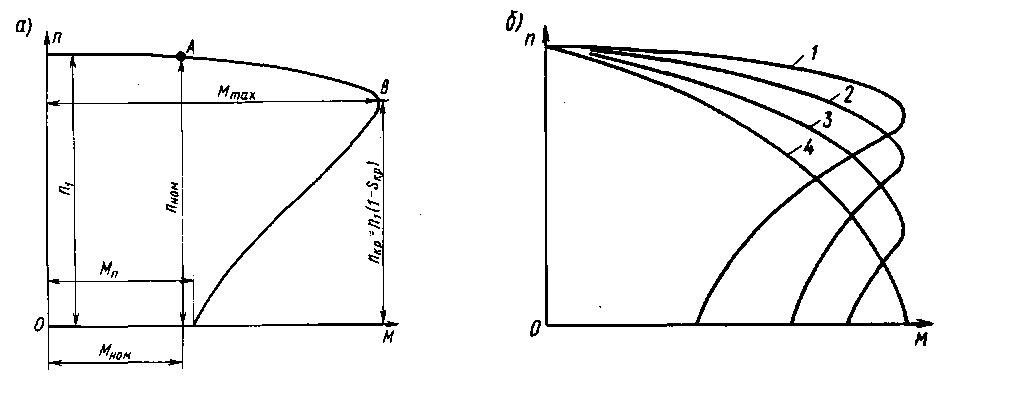
Рис.
262. Механические характеристики
асинхронного двигателя: а — естественная;
б — при включении пускового реостата
на
рис. 262, а, частота вращения асинхронного
двигателя лишь незначительно снижается
при увеличении нагрузки в диапазоне от
нуля до наибольшего ее значения. Поэтому
говорят, что такой двигатель обладает
жесткой механической характеристикой.
Наибольший
вращающий момент Mmax
двигатель развивает при некоторое
скольжении skp,
составляющем 10—20%. Отношение Mmax/Mном
определяет перегрузочную способность
двигателя, а отношение Мп/Мном
— его пусковые свойства.
Двигатель
может устойчиво работать только при
обеспечении саморегулирования, т. е.
автоматическом установлении равновесия
между приложенным к валу моментом
нагрузки Мвн
и моментом М, развиваемым двигателем.
Этому условию соответствует верхняя
часть характеристики до достижения
Mmax
(до точки В). Если нагрузочный момент
Мвн
превысит момент Mmax,
то двигатель теряет устойчивость и
останавливается, при этом по обмоткам
машины будет длительно проходить ток
в 5—7 раз больше номинального, и они
могут сгореть.
При
включении в цепь обмоток ротора пускового
реостата получаем семейство механических
характеристик (рис. 262,б). Характеристика
1 при работе двигателя без пускового
реостата называется естественной.
Характеристики 2, 3 и 4, получаемые при
подключении к обмотке ротора двигателя
реостата с сопротивлениями R1п
(кривая 2), R2п
(кривая 3) и R3п
(кривая 4), называют реостатными
механическими характеристиками. При
включении пускового реостата механическая
характеристика становится более мягкой
(более крутопадающей), так как увеличивается
активное сопротивление цепи ротора R2
и возрастает sкp.
При этом уменьшается пусковой ток.
Пусковой момент Мп
также зависит от R2.
Можно так подобрать сопротивление
реостата, чтобы пусковой момент Мп
был равен наибольшему Мmax.
В
двигателе с повышенным пусковым моментом
естественная механическая характеристика
приближается по своей форме к характеристике
двигателя с включенным пусковым
реостатом. Вращающий момент двигателя
с двойной беличьей клеткой равен сумме
двух моментов, создаваемых рабочей и
пусковой клетками. Поэтому характеристику
1 (рис. 263) можно получить путем суммирования
характеристик 2 и 3, создаваемых этими
клетками. Пусковой момент Мп
такого двигателя значительно больше,
чем момент М’п
обычного короткозамкнутого двигателя.
Механическая характеристика двигателя
с глубокими пазами такая же, как и у
двигателя с двойной беличьей клеткой.
НА
ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ
!!!
Рабочие
характеристики. Рабочими
характеристиками асинхронного двигателя
называются зависимости частоты вращения
n (или скольжения s), момента на валу М2,
тока статора I1
коэффициента полезного действия ? и
cos?1,
от полезной мощности Р2
= Рmx
при номинальных значениях напряжения
U1
и частоты f1
(рис. 264). Они строятся только для зоны
практической устойчивой работы двигателя,
т. е. от скольжения, равного нулю, до
скольжения, превышающего номинальное
на 10—20%. Частота вращения n с ростом
отдаваемой мощности Р2
изменяется мало, так же как и в механической
характеристике; вращающий момент на
валу М2
пропорционален мощности Р2,
он меньше электромагнитного момента М
на значение тормозящего момента Мтр,
создаваемого силами трения.
Ток
статора I1,
возрастает с увеличением отдаваемой
мощности, но при Р2
= 0 имеется некоторый ток холостого хода
I0.
К. п. д. изменяется примерно так же, как
и в трансформаторе, сохраняя достаточно
большое значение в сравнительно широком
диапазоне нагрузки.
Наибольшее
значение к. п. д. для асинхронных двигателей
средней и большой мощности составляет
0,75—0,95 (машины большой мощности имеют
соответственно больший к. п. д.). Коэффициент
мощности cos?1
асинхронных двигателей средней и большой
мощности при полной нагрузке равен
0,7—0,9. Следовательно, они загружают
электрические станции и сети значительными
реактивными токами (от 70 до 40% номинального
тока), что является существенным
недостатком этих двигателей.
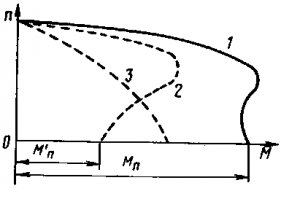 Рис.
Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
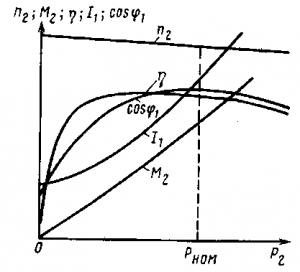 Рис.
Рис.
264. Рабочие характеристики асинхронного
двигателя
При
нагрузках 25—50 % номинальной, которые
часто встречаются при эксплуатации
различных механизмов, коэффициент
мощности уменьшается до неудовлетворительных
с энергетической точки зрения значений
(0,5—0,75).
При
снятии нагрузки с двигателя коэффициент
мощности уменьшается до значений
0,25—0,3, поэтому
нельзя допускать работу асинхронных
двигателей при холостом ходе и значительных
недогрузках.
Работа
при пониженном напряжении и обрыве
одной из фаз.
Понижение
напряжения сети не оказывает существенного
влияния на частоту вращения ротора
асинхронного двигателя. Однако в этом
случае сильно уменьшается наибольший
вращающий момент, который может развить
асинхронный двигатель (при понижении
напряжения на 30% он уменьшается примерно
в 2 раза). Поэтому при значительном
падении напряжения двигатель может
остановиться, а при низком напряжении
— не включиться в работу.
На
э. п. с. переменного тока при уменьшении
напряжения в контактной сети соответственно
уменьшается и напряжение в трехфазной
сети, от которой питаются асинхронные
двигатели, приводящие во вращение
вспомогательные машины (вентиляторы,
компрессоры, насосы). Для того чтобы
обеспечить нормальную работу асинхронных
двигателей при пониженном напряжении
(они должны нормально работать при
уменьшении напряжения до 0,75Uном),
мощность всех двигателей вспомогательных
машин на э. п. с. берется примерно в
1,5—1,6 раза большей, чем это необходимо
для привода их при номинальном напряжении.
Такой запас по мощности необходим также
из-за некоторой несимметрии фазных
напряжений, так как на э. п. с. асинхронные
двигатели питаются не от трехфазного
генератора, а от расщепителя фаз. При
несимметрии напряжений фазные токи
двигателя будут неодинаковы и сдвиг
между ними по фазе не будет равен 120°. В
результате по одной из фаз будет протекать
больший ток, вызывающий увеличенный
нагрев обмоток данной фазы. Это заставляет
ограничивать нагрузку двигателя по
сравнению с работой его при симметричном
напряжении. Кроме того, при несимметрии
напряжений возникает не круговое, а
эллиптическое вращающееся магнитное
поле и несколько изменяется форма
механической характеристики двигателя.
При этом уменьшаются его наибольший и
пусковой моменты. Несимметрию напряжений
характеризуют коэффициентом несимметрии,
который равен среднему относительному
(в процентах) отклонению напряжений в
отдельных фазах от среднего (симметричного)
напряжения. Систему трехфазных напряжений
принято считать практически симметричной,
если этот коэффициент меньше 5 %.
При
обрыве одной из фаз двигатель продолжает
работать, но по неповрежденным фазам
будут протекать повышенные токи,
вызывающие увеличенный нагрев обмоток;
такой режим не должен допускаться. Пуск
двигателя с оборванной фазой невозможен,
так как при этом не создается вращающееся
магнитное поле, вследствие чего ротор
двигателя не будет вращаться.
Использование
асинхронных двигателей для привода
вспомогательных машин э. п. с. обеспечивает
значительные преимущества по сравнению
с двигателями постоянного тока. При
уменьшении напряжения в контактной
сети частота вращения асинхронных
двигателей, а следовательно, и подача
компрессоров, вентиляторов, насосов
практически не изменяются. В двигателях
же постоянного тока частота вращения
пропорциональна питающему напряжению,
поэтому подача этих машин существенно
уменьшается.
3
Главная / Техническая информация / Механические характеристики асинхронного двигателя
Механические характеристики асинхронного двигателя – зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу).
Электромагнитный момент М, развиваемый асинхронным двигателем, можно определять двумя способами: через электромагнитную мощность Рэм и через полную механическую мощность двигателя Р2:
М=Р2‘/ω, (39)
где Р2 —полная механическая мощность, Вт; ω=2πn/60 — механическая угловая скорость вращения ротора, 1/с; n — частота вращения ротора, об/мин.
Скорость ω связана с синхронной ω1 соотношением

Подставляя выражение для ω и Р2‘ по уравнению (36) в уравнение (39), получаем
 (40)
(40)
Выражение для момента через электромагнитную мощность имеет вид
М=Рэм/ω1,
Значение Рэм находится по уравнению (35), после чего представляем
Таким образом мы получим тождественное выражение для момента. Поскольку независимой величиной является не ток, а приложенное напряжение, то для получения окончательного выражения момента подставим в (40) значение тока I2‘ по уравнению (32):
 (41)
(41)
где М — момент, Н∙м; ω1 — синхронная скорость, с-1; U1 — напряжение, В; r1, r2‘, x1, x2‘ —сопротивления, Ом; s — скольжение, отн. ед.
Если необходимо иметь значение момента во внесистемных единицах — в килограммах силы-метрах, то полученный по (41) результат следует разделить на 9,81.
При эксплуатации часто необходимо определять момент по известной механической мощности Р2 (кВт) и частоте вращения n (об/мин). В этом случае формула (39) имеет вид, Н/м,
 (42)
(42)
Отсюда мощность Р2 связана с моментом и частотой вращения соотношением
 (43)
(43)
где М — момент, Н∙м; n — частота вращения, об/мин.
Если момент выражен в килограммах силы-метрах, то формулы (42), (43) преобразуются к виду

Зависимость между моментом и скольжением (41) при постоянном напряжении U1 и частоте f1 сети называется механической характеристикой. Естественная механическая характеристика асинхронного двигателя приведена на рис. 20. Там же приведена механическая характеристика M=f (n), часто встречающаяся на практике и полученная из характеристики M = φ(s) пересчетом (s=0 соответствует синхронной частоте вращения n1, s =1-n=0 и т. д.).
Рис. 20. Естественная механическая характеристика асинхронного двигателя: a —M=f(s); б – n =f(М); А—генераторный режим; Б — режим двигателя; В — режим электромагнитного тормоза
Используя формулу (41), можно получить достаточно полное представление о механических характеристиках асинхронного двигателя. Обратим прежде всего внимание на то, что механический момент двигателя зависит от трех групп величин: во-первых, это величины, определяемые конструкцией двигателя, к их числу относятся r1 и r’2, x1, х’2; во-вторых, величины, характеризующие напряжение, подводимое к двигателю, — напряжение на его зажимах U и частота питающего напряжения f (так как ω1 = 2πf); наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Рассмотрим физические явления, обусловливающие такую форму механической характеристики. При частоте вращения ротора, равной синхронной, проводники ротора движутся с той же скоростью, что и вращающееся магнитное поле. Поэтому ЭДС, а следовательно, и ток в роторе равны нулю. Поэтому равен нулю и вращающий момент двигателя. При уменьшении частоты вращения ротора ниже синхронной проводники обмотки ротора начинают пересекать магнитное поле машины, в результате чего в обмотке ротора наводится ЭДС, пропорциональная скольжению ротора [см. формулу (14)]. При малых скольжениях (в пределах от s=0 до s=sкр) ток ротора также изменяется почти пропорционально скольжению. К такому выводу можно прийти, рассматривая уравнение (25) или (32). Так, в уравнении (25) при малых значениях s можно пренебречь составляющей sx2 в знаменателе по сравнению со значением r2, а в (32) можно пренебречь всеми составляющими в знаменателе по сравнению со значением r’2/s.
Таким образом, ток ротора в этом диапазоне скольжений практически определяется величиной ЭДС ротора, деленной на постоянное активное сопротивление r2 [уравнение (25)].
Как видно из рис. 20, механическая характеристика в зоне малых скольжений s<sкр линейна. В этой же области скольжений находится и номинальное скольжение sном=0,01—0,1 (большие значения номинального скольжения относятся к двигателям мощностью до 1 кВт).
По мере увеличения скольжения увеличивается частота токов в роторе и возрастает влияние на характеристику индуктивного сопротивления ротора. Изменение тока, определяемое в зоне малых скольжений в основном активным сопротивлением [см. формулу (25)], замедляется, и при некотором скольжении, называемом критическим sкр, достигается максимальное значение момента. При дальнейшем увеличении скольжения (уменьшении частоты вращения ротора) момент будет уменьшаться.
Критическое скольжение находится по формуле
 (44)
(44)
где знак плюс соответствует двигательному режиму работы, а минус — генераторному (как следует из рис. 20, генераторный режим соответствует области отрицательных скольжений).
Поскольку для двигателей мощностью более 1 кВт практически всегда r1<<(х1 + х’2), то формулу для критического скольжения можно упростить:
 (44а)
(44а)
Теперь, подставляя значение s=sкр в формулу (41), получим выражение для максимального момента
 (45)
(45)
Взяв теперь отношение текущего значения момента к максимальному М/Мmax при условии r1≈0, получим
 (46)
(46)
Формула (46) оказывается весьма удобной, так как позволяет построить механическую характеристику двигателя M=f(s) при известных значениях максимального момента и соответствующего ему критического скольжения. Задавая текущее значение скольжения в диапазоне 0<s≤1, решают уравнение (46) относительно текущего момента М. Можно поступить иначе — строить механическую характеристику в относительных единицах, т. е. получать характеристику M/Mmax=f (s).
Относительный максимальный момент определяет его перегрузочную способность, т. е. способность двигателя кратковременно выдерживать нагрузки, большие номинальной. В электрических машинах перегрузочная способность обозначает kм и определяется как
kм = Mmax/Mном (47)
Важное значение имеет пусковой момент, который можно рассчитывать по общей формуле (41) при подстановке в нее s= 1:
 (48)
(48)
Относительное значение пускового момента kп определяет способность двигателя разгоняться до рабочей частоты вращения с полной нагрузкой на валу и определяется как
kп = Mп/Mном
В ряде случаев вместо (46) удобнее пользоваться формулой, в которой текущий момент двигателя отнесен не к максимальному, а к номинальному моменту. В этом случае
 (49)
(49)
где sкр, sном — значения критического и номинального скольжения двигателя; ρ=r1/r’2 (для двигателей серии 4А с высотой оси вращения 56—132 мм пользуются значением ρ≈1,32).
Если пренебречь величиной r1 (т. е. положить ρ=0), то из (49) следует
 (50)
(50)
Анализ выражения (41) для электромагнитного момента показывает, чт момент зависит от квадрата напряжения сети, что является недостатком асинхронных двигателей. Так, при снижении напряжения на 10 % момент уменьшается на 19%, а при снижении напряжения на 20 % уменьшение момента составляет 36%. На рис. 21 изображены механические характеристики двигателя при номинальном питающем напряжении (естественная характеристика) и при пониженном напряжении.
При уменьшении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит снижение частоты вращения двигателя. Частота снижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления Мс, обусловленному (приводом (соответствующие частоты вращения показаны точками на механических характеристиках рис. 21). При сильном уменьшении напряжения может случиться, что максимальный момент окажется меньше момента сопротивления Мс. В этом случае двигатель опрокидывается, т. е. его частота вращения уменьшается и в конце концов он останавливается. При заторможенном роторе по обмоткам двигателя протекают большие токи, и во избежание аварии сам двигатель должен быть отключен от сети (эти функции выполняет тепловая защита).
Рис. 21. Механические характеристики асинхронного двигателя при различных значениях питающего напряжения
