Содержание:
Закон всемирного тяготения:
Каждый из нас на личном опыте ощущает силу притяжения к Земле, благодаря которой мы можем ходить и бегать. Но, споткнувшись, именно под действием этой силы мы падаем на землю. В 7-м классе вы узнали, что эта сила называется силой тяжести и определяется произведением массы тела на ускорение свободного падения: 
Почему Земля притягивает все тела? Чем определяется модуль ускорения падающего на Землю тела и, следовательно, сила притяжения к Земле?
Какие причины вызывают движение Луны вокруг Земли практически по круговой орбите?
Почему планеты Солнечной системы и в том числе наша Земля движутся вокруг Солнца?
Ньютон был первым ученым, который сначала высказал гипотезу, объясняющую все эти явления, а потом строго ее доказал. Он предположил, что между любыми телами существуют силы тяготения, и, например, падение камня и движение Луны по своей орбите определяется силой притяжения Земли. Чтобы установить закон, которому подчиняются силы тяготения, Ньютон сравни траектории и ускорения этих тел.
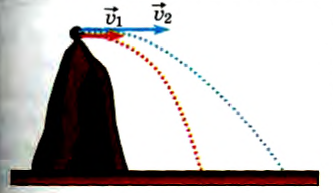
Камень, брошенный горизонтально с некоторой начальной скоростью, двинется к Земле по криволинейной траектории (рис. 54). Если увеличивать начальную скорость бросания, то дальность полета тела также возрастает. Из-за кривизны поверхности Земли при определенной начальной скорости камень вообще может не достигнуть Земли и начнет двигаться вокруг нее подобно Луне (рис. 55).
|
|
 Рис. 55 |
Из этого мысленного эксперимента Ньютон сделал вывод, что движение камня и движение Луны обусловлены одной и той же причиной — притяжением Земли.
В то же время, по известным астрономическим данным (расстоянию до Луны и периоду ее обращения вокруг Земли), можно было определить ускорение Луны. Вычисленное таким образом центростремительное ускорение Луны оказалось равным 0,0027  , что примерно в 3600 раз меньше ускорения свободного падения (9,8) камня, движущегося у поверхности Земли.
, что примерно в 3600 раз меньше ускорения свободного падения (9,8) камня, движущегося у поверхности Земли.
Так как Луна приблизительно в 60 раз дальше от центра Земли, чем камень, то Ньютон предположил, что ускорение, которое сообщает телам сила тяготения Земли, обратно пропорционально квадрату расстояния до центра Земли. Поскольку ускорение прямо пропорционально действующей на тело силе, то сила тяготения Земли также по величине обратно пропорциональна квадрату расстояния до центра Земли.
Зависит ли сила тяготения от массы тел? Опыты Галилея доказали, что ускорение свободного падения не зависит от массы тела. Это возможно только в том случае, если сила тяготения пропорциональна массе тела: F ~ m. Действительно, тогда увеличение или уменьшение массы, например, в два раза вызовет соответствующее изменение силы тяготения в два раза, но ускорение по второму закону Ньютона останется прежним:
 и т. д.
и т. д.
C другой стороны, во взаимодействии всегда участвуют два тела, на каждое из которых по третьему закону Ньютона действуют одинаковые по модулю силы. Следовательно, сила тяготения должна быть пропорциональна массе обоих тел. Так Ньютон пришел к выводу, что сила тяготения между телом и Землей прямо пропорциональна произведению их масс и обратно пропорциональна квадрату расстояния между их центрами:

Выполняется этот закон только для Земли или является всеобщим?
Чтобы ответить на этот вопрос, Ньютон рассмотрел кинематические законы движения планет Солнечной системы, сформулированные немецким ученым Иоганном Кеплером на основании многолетних астрономических наблюдений датского ученого Тихо Браге.
Орбиты, по которым движутся планеты под действием силы тяготения Солнца, очень близки к круговым. Тогда один из законов Кеплера может быть записан в форме:

где T1 и T2, R1 и R2 — периоды обращения и средние радиусы орбит при вращении вокруг Солнца двух каких-либо планет Солнечной системы.
Используя формулу  , Ньютон рассчитал центростремительные ускорения планет. Он обнаружил, что сила тяготения Солнца сообщает всем планетам ускорения, не зависящие от их массы и убывающие обратно пропорционально квадрату расстояния от Солнца.
, Ньютон рассчитал центростремительные ускорения планет. Он обнаружил, что сила тяготения Солнца сообщает всем планетам ускорения, не зависящие от их массы и убывающие обратно пропорционально квадрату расстояния от Солнца.
Ньютон доказал, что силы тяготения между планетами и Солнцем также подчиняются установленной им закономерности, и в 1667 г. сформулировал закон всемирного тяготения.
Так как размеры планет много меньше их расстояний до Солнца, то планеты можно рассматривать как материальные точки. В этом случае формулировка закона всемирного тяготения наиболее точна:
две материальные точки притягиваются друг к другу с силами, модули которых прямо пропорциональны произведению масс этих точек и обратно пропорциональны квадрату расстояния между ними (рис. 56, а):
Если размерами взаимодействующих тел нельзя пренебречь, то, чтобы определить силу тяготения между ними, необходимо разбить тела на такие малые обьемы, которые можно было бы считать материальными точками. Для нахождения силы тяготения между телами необходимо будет найти все силы притяжения между этими «материальными точками» и векторно их сложить.
Если тела представляют собой однородные шары массами m1 и m2, то расчеты показывают, что формула для силы тяготения между ними будет такая же, как и для материальных точек, но в этом случае r — расстояние межlу центрами шаров (рис. 56. 6).
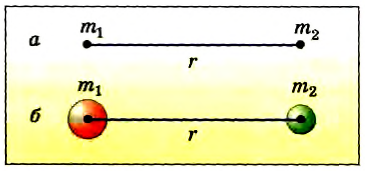
Рис. 56
Коэффициент пропорциональности G называется гравитационной постоянной (лат. gravitas — тяжесть). Определить величину гравитационной постоянной на основании астрономических данных Ньютон не мог, так как массы планет и Солнца в то время были не известны.
Впервые эта величина была определена в 1798 г. английским физиком Кавендишем с помощью прибора, называемого крутильными весами (рис. 57). Основной частью этого прибора было легкое коромысло с двумя шарами на концах, подвешенное на упругой проволоке. Рядом с ними неподвижно закрепляли два тяжелых шара. Под действием сил тяготения между этими шарами и подвешенными шарами коромысло поворачивалось на некоторый угол.
Зная величину этого угла, массы взаимодействующих тел, расстояния между их центрами и упругие свойства проволоки, Кавендиш рассчитал величину гравитационной постоянной:
Н* м2
Современное значение гравитационной постоянной  . Она является одной из мировых констант, и поэтому периодически проводятся опыты по уточнению ее численного значения.
. Она является одной из мировых констант, и поэтому периодически проводятся опыты по уточнению ее численного значения.
Силы всемирного тяготения самые универсальные из сил природы, так как действуют между любыми телами. Но из-за такой малой величины гравитационной постоянной силы тяготения являются значительными только для тел с очень большой массой, например для планет и других космических тел.
Если известен кинематический закон движения спутника какого-либо космического тела (планеты, звезды, кометы), то, используя закон всемирного тяготения и второй закон Ньютона, можно рассчитать массу этого тела. Так и были определены массы различных космических тел (рис. 58): Солнца, Луны, Земли, других планет и их спутников.
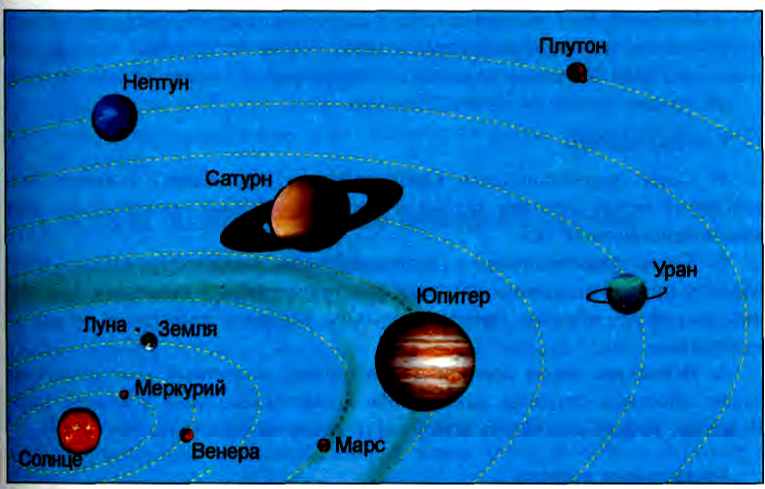
Рис. 58
При изучении физики в 8-м и 9-м классах вы узнали, что электрические и магнитные взаимодействия тел определяются существующими вокруг них электрическими и магнитными полями.
Аналогично вокруг любого тела существует особая форма материи — гравитационное поле, характеристики которого зависят от массы тела. Если масса одного тела много больше массы другого, то его гравитационным полем можно пренебречь по сравнению с полем первого тела. Поэтому говорят, например, что самолет движется в гравитационном поле Земли или планеты Солнечной системы движутся в гравитационном поле Солнца.
Закон всемирного тяготения стал важнейшей ступенью в развитии всей физики, так как выявил новое свойство массы тела.
Сила гравитационного взаимодействия пропорциональна массам тел, т. е. масса является мерой тяготения, и, следовательно, ее можно назвать гравитационной.
Во втором законе Ньютона масса определяет инертные свойства тела, т. е. его способность приобретать большее или меньшее ускорение, и ее естественно назвать инертной.
Одинаковы ли эти массы? Многочисленные опыты показывают, что эти массы равны друг другу.
Опытный факт равенства гравитационной и инертной масс, называемый принципом эквивалентности, Альберт Эйнштейн положил в основу общей теории относительности, обобщающей и уточняющей более простую теорию тяготения Исаака Ньютона.
Главные выводы
- Силы гравитационного взаимодействия (тяготения) универсальны, действуют между любыми телами и пропорциональны произведению масс взаимодействующих тел.
- Силы гравитационного взаимодействия двух материальных точек обратно пропорциональны квадрату расстояния между ними, для однородных шаров — обратно пропорциональны квадрату расстояния между их центрами.
- Используя закон всемирного тяготения, известный кинематический закон движения спутника какого-либо космического тела и второй закон Ньютона, можно рассчитать массу этого космического тела.
Сила тяжести
Как мы уже обсуждали, исторически сложилось, что силой тяжести  называется сила, с которой Земля притягивает тело. Масса данного тела — величина постоянная, и, следовательно, силу тяжести определяет ускорение свободного падения. А почему ускорение свободного падения принимают равным 9,8
называется сила, с которой Земля притягивает тело. Масса данного тела — величина постоянная, и, следовательно, силу тяжести определяет ускорение свободного падения. А почему ускорение свободного падения принимают равным 9,8  ? От чего оно зависит?
? От чего оно зависит?
Измерения, проведенные в различных точках поверхности Земли, показывают, что ускорение свободного падения может иметь различные значения, а 9,8 — это среднее значение данной величины. Как это объяснить?
Теперь вы знаете, что силу, с которой на тело действует Земля, можно рассчитать по закону всемирного тяготения. Будем считать Землю однородным шаром массой M и радиусом R. Любое тело по сравнению с нашей планетой можно считать материальной точкой. Если тело находится на небольшой высоте h≪R от поверхности Земли (или h = 0), то можно записать для силы их гравитационного взаимодействия:

Сравнивая модули силы тяжести и гравитационного взаимодействия, можно найти модуль ускорения свободного падения:
Полученная формула показывает, что ускорение свободного падения зависит только от массы Земли и ее радиуса, и поэтому его модуль одинаков для всех тел.
Если высотой тела над поверхностью Земли нельзя пренебречь, то расстояние между телом и центром земного шара равно r = R + h, и модуль ускорения свободного падения будет тем меньше, чем дальше тело от поверхности.
Поэтому часто для ускорения свободного паления вблизи поверхности вводят индекс «0», а для ускорения свободного падения на некоторой высоте от поверхности Земли — индекс «h»:

Следовательно, и модуль силы тяжести будет отличаться при различном расположении тела относительно поверхности Земли: mg0 или mgh.
Какую удивительную возможность дает нам полученная формула для g0?
Эта формула позволяет определить массу нашей планеты (рис. 59), ведь среднее значение модуля ускорения свободного падения и средний радиус Земли уже давно определены опытным путем:

Именно потому, что с помощью закона всемирного тяготения возможны подобные расчеты, его иногда в шутку называют «всемирными весами».
Аналогично можно получить формулы для ускорения свободного падения и силы тяжести вблизи любого космического тела: Луны, Марса, Солнца, только в них соответственно будут входить масса и радиус этого космического тела.
Так как мы получили формулы для ускорения свободного падения, рассматривая самую простую модель гравитационного взаимодействия, то иногда говорят, что это формулы для расчета ускорения свободного падения в «первом приближении».
Какие еще факторы влияют на модуль ускорения свободного падения, например, вблизи данной точки земной поверхности?
- Земля не является шаром. Форма нашей планеты в честь ее греческого имени Гея носит название «геоид», так как радиус кривизны ее поверхности у полюсов больше, чем на экваторе.
- Наша планета не однородна по строению, состоит из различных слоев, в которых есть области различной плотности, например залежи нефти и газа или залежи тяжелых металлов.
- В рассмотренной модели не учтено суточное вращение Земли.
- При расчетах не учитывалось гравитационное взаимодействие тела с другими космическими телами: Луной, Солнцем и т. п.
Именно поэтому модуль ускорения свободного падения отличается для различных точек на поверхности Земли. Например, на полюсах  , a на экваторе —
, a на экваторе —  .
.
При решении задач, если в условии ничего не сказано о форме планеты, ее строении, параметрах вращательного движения, используется рассмотренная нами простейшая модель гравитационного взаимодействия и полученные формулы.
Главные выводы:
- Причиной существования силы тяжести является гравитационное взаимодействие между телом и Землей.
- Если не учитывать особенности строения и формы Земли и участие ее во вращательном движении, то модуль ускорения свободного падения определяется только ее массой и радиусом.
- При удалении от поверхности Земли модули ускорения свободного падения и силы тяжести уменьшаются.
Свободное падение тел (движение по прямолинейной траектории)
Каждый человек в своей жизни наблюдал движение различных тел под действием силы притяжения к Земле (рис. 60). Падает вниз с парты ручка или резинка, плавно опускается лист дерева, движется по сложной траектории после удара мяч и т. п. Причем каждый наблюдал, что если с одной ветки одновременно начали падать лист и яблоко, то яблоко движется быстрее.

Рис. 60
На основании таких наблюдений до опытов известного итальянского ученого Галилео Галилея считалось, что более тяжелые тела с одной и той же высоты падают быстрее, чем легкие. По преданию, Галилей изучал падение различных тел со знаменитой Пизанской башни (рис. 61) и установил, что все тела, независимо от их массы, падают с одинаковым ускорением, если их движению ничто не мешает.

Рис. 61
Проведем такой опыт. В стеклянную трубку, один конец которой запаян, а другой закрыт пробкой с краном, поместим птичье перо, кусок пенопласта и свинцовую дробинку. Перевернув трубку, мы обнаружим, что эти тела упадут на дно не одновременно (рис. 62, а): первой на дне окажется свинцовая дробинка, а позже всех упадет птичье перо. Так, может, не прав Галилей?
Чтобы ответить на этот вопрос, проведем опыт при других условиях. Откачаем насосом воздух из трубки, закроем кран и вновь быстро перевернем трубку. Теперь все три предмета упадут на дно трубки одновременно (рис. 62, б), потому что их движению не мешает воздух, и, следовательно, вывод Галилея подтверждается.
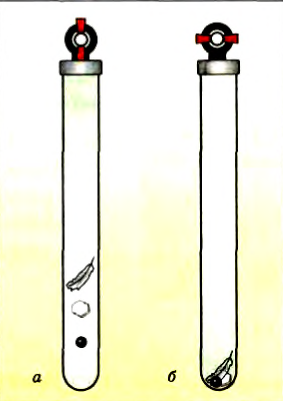
Рис. 62
Свободным падением называется движение тела только под действием силы тяжести с любой начальной скоростью.
Свободное падение — модель реального движения тела вблизи поверхности Земли под действием ее силы притяжения, при котором не учитываются суточное вращение Земли, размеры тела и сопротивление воздуха его движению. В физических задачах эта модель применяется при рассмотрении движения, например, падающего с горы камня, мяча после подачи игрока, пули, выпущенной из ружья, и т. п.
При этих условиях сила тяжести считается постоянной и рассчитывается по формуле  , где
, где  . Если тело движется только под действием силы тяжести, то по второму закону Ньютона ускорение свободно падающего тела
. Если тело движется только под действием силы тяжести, то по второму закону Ньютона ускорение свободно падающего тела  и не зависит от массы тела.
и не зависит от массы тела.
Поэтому разные тела движутся с одинаковыми ускорениями, как показано на рисунке 63. Этот рисунок сделан с фотографии, которую получили, открывая объектив и чередуя вспышки света каждые  с (такая фотография называется стробоскопической).
с (такая фотография называется стробоскопической).
Рис. 63
Следовательно, свободное падение — частный случай равноускоренного движения, и если , то можно записать выражения для радиус-вектора и мгновенной скорости тела:
, то можно записать выражения для радиус-вектора и мгновенной скорости тела:
- Заказать решение задач по физике
Рассмотрим наиболее часто встречающиеся случаи свободного падения тела.
1) Пусть тело свободно падает без начальной скорости с высоты h над поверхностью Земли. Для описания механического движения необходимо выбрать систему отсчета, и в данном случае полезно рассмотреть движение тела в двух системах координат.
а) Выберем начало первой системы координат под точкой начала падения тела, а ось Oy направим вверх (рис. 64). Ось Ox не нужна, так как все векторы расположены вдоль оси Оу. Найдем проекции векторов и запишем уравнения для координаты и проекции мгновенной скорости:


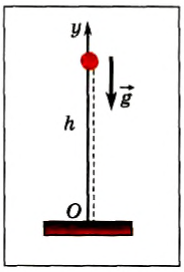
Рис. 64
Найдем время падения тела tk, используя то, что в последний момент движения тело попадает в начало выбранной оси Оу, т. е. его конечная координата равна:
Тогда
Зная все время падения тела, можно найти проекцию его скорости в последний момент движения:
Проекция скорости тела отрицательна, так как скорость направлена противоположно выбранному направлению оси Оу.
б) Можно выбрать и другую систему координат (рис. 65). Тогда проекции векторов:

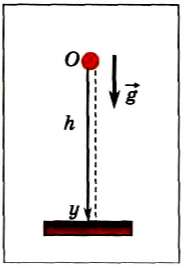
Рис. 65
и уравнения для координаты тела и для проекции мгновенной скорости в любой момент времени будут иметь вид:
В последний момент движения в этой системе отсчета конечная координата тела равна:
Отсюда все время движения:

а проекция конечной скорости тела:
Мы получили для расчета времени падения ту же формулу, а формула для проекции скорости отличается только знаком, указывающим направление скорости по отношению к выбранной системе координат.
Как и следовало ожидать, полученные результаты не зависят от выбора системы координат.
2) Рассмотрим другой случай свободного падения: тело брошено с начальной скоростью υ0, направленной вертикально вверх (рис. 66), и вернулось в точку бросания. Например, вы бросили вверх мяч и поймали его при возвращении.
Рис. 66
Выберем начало оси Oy в точке начала движения тела (рис. 67). Тогда проекции векторов:

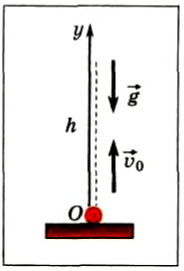
Рис. 67
Уравнения для координаты тела и для проекции мгновенной скорости в любой момент времени:

Найдем все время движения тела, или время возвращения тела в точку бросания tk, учитывая, что в последний момент движения тело попадает в начало оси Оу, т. е. его конечная координата:
Это квадратное уравнение имеет два корня:
которые соответствуют начальному моменту движения и моменту возвращения тела в исходную точку.
Найдем скорость тела в последний момент движения, подставив все время движения в уравнение для проекции скорости:

Отсюда следует: с какой скоростью мяч брошен вертикально вверх, с такой же скоростью по модулю, но противоположной по направлению, вернется в точку бросания (и ударит по бросившим его рукам!).
Найдем время подъема тела на максимальную высоту и значение этой высоты.
При движении тела вверх проекция мгновенной скорости уменьшается. В момент максимального подъема тело на мгновение останавливается (а затем начинает падать вниз), т. е. υty = 0 = υo-gtn. Тогда время подъема тела на максимальную высоту:
 ,
,
т. е. равно половине всего времени движения:
 ,
,
а максимальное значение координаты или высоты подъема:

или
 .
.
Следовательно, сколько времени тело поднималось до максимальной высоты, столько же времени с этой высоты возвращалось в исходную точку.
Можно показать, что для брошенного вертикально вверх тела: 1) скорость, с которой оно проходит при подъеме любую точку на некоторой высоте, равна по модулю и противоположна по направлению скорости, с которой оно проходит эту же точку на спуске; 2) время подъема тела между любыми двумя точками по вертикали равно времени падения между этими же точками.
Знание этих соотношений позволяет более просто решить некоторые задачи.
Если сопротивлением воздуха пренебречь нельзя, то время подъема вертикально брошенного тела до максимальной высоты всегда меньше времени возвращения с этой высоты, а конечная скорость при возвращении в исходную точку всегда меньше начальной.
Аналогично можно рассмотреть движение тела, брошенного вертикально вниз с некоторой высоты с начальной скоростью.
Главные выводы:
- Свободное падение — это движение тела только под действием силы тяжести.
- Если начальная скорость тела равна нулю или коллинеарна вектору ускорения свободного падения, то свободное падение представляет собой частный случай равноускоренного прямолинейного движения с ускорением:
 .
. - Для тела, брошенного вертикально вверх: а) скорость прохождения точки на некоторой высоте при подъеме равна по модулю и противоположна по направлению скорости при прохождении этой же точки на спуске; б) время подъема между двумя точками по вертикали равно времени падения между этими же точками.
 .
.Свободное падение тел (движение по криволинейной траектории)
Рассмотрим свободное падение тел в случаях, когда вектор начальной скорости направлен не вертикально. Для наглядного представления такой траектории удобно рассматривать полет струи воды, вытекающей под напором из шланга (рис. 68).

Рис. 68
Например, мяч в результате броска (рис. 69, а) начинает двигаться под углом к горизонту или во время игры человек бросает мяч в горизонтальном направлении (рис. 69,6). Из личного опыта каждый знает, что в обоих случаях мяч движется по криволинейной траектории.
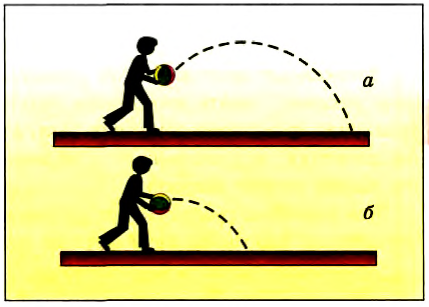
Рис. 69
1) При броске в горизонтальном направлении тело начинает движение со скоростью  , направленной горизонтально, т. е. перпендикулярно вектору ускорения свободного падения:
, направленной горизонтально, т. е. перпендикулярно вектору ускорения свободного падения: 
Выберем начало системы отсчета па вертикальной линии под точкой бросания (рис. 70). В этом случае векторы  расположены в одной вертикальной плоскости. Следовательно, вектор
расположены в одной вертикальной плоскости. Следовательно, вектор  будет в любой момент времени расположен в этой плоскости. Значит, тело будет двигаться по траектории, лежащей в этой же плоскости, а для описания движения тела можно использовать только две оси декартовой системы координат Ox и Оу.
будет в любой момент времени расположен в этой плоскости. Значит, тело будет двигаться по траектории, лежащей в этой же плоскости, а для описания движения тела можно использовать только две оси декартовой системы координат Ox и Оу.
Тогда

и можно записать кинематические уравнения для координат тела и проекций его скорости:

Первые две формулы показывают, что координата х1 прямо пропорциональна времени, а проекция скорости на ось Ox не зависит от времени, т. е. эти уравнения соответствуют уравнению равномерного прямолинейного движения.
Две последние формулы описывают равноускоренное движение. Следовательно, рассматриваемое сложное движение в плоскости можно представлять в виде двух движений: одно — свободное падение без начальной скорости, а второе — равномерное движение в горизонтальном направлении.
Записанные кинематические уравнения позволяют решить основную задачу механики: найти координаты тела в любой момент времени, получить уравнение траектории движения тела, а также формулы для расчета времени движения, дальности полета, величины и направления скорости тела в последний момент движения.
Как известно, уравнение траектории представляет собой функциональную зависимость координат точки друг от друга. Получим уравнение траектории, х.
выражая время  и подставляя его в уравнение для координаты:
и подставляя его в уравнение для координаты:
Следовательно, траектория движения тела представляет собой ветвь параболы.
Например, если при стрельбе по мишени спортсмен держит винтовку горизонтально, то пуля движется по параболе и за время полета до мишени опустится тем ниже начального уровня, чем дальше мишень. Это обязательно учитывают спортсмены, для того чтобы показать лучшие результаты.
Найдем полное время движения тела, используя то, что в выбранной системе отсчета конечная его координата равна нулю:

Полученная формула показывает, что полное время движения тела, начальная скорость которого направлена горизонтально, не зависит от ее значения. Следовательно, если два тела одновременно начали движение с одной и той же высоты, одно — горизонтально с начальной скоростью, а второе — вниз без начальной скорости, то они упадут одновременно (конечно, если не учитывать сопротивление воздуха).
Получим формулу для дальности полета тела, которую рассчитывают как расстояние, пройденное телом в горизонтальном направлении, т. е. в выбранной системе отсчета:
Из этой формулы следует, что, чем больше начальная скорость тела и высота, с которой оно брошено, тем больше дальность его полета.
Скорость тела направлена по касательной к параболической траектории (рис. 71), а ее модуль в любой момент времени можно найти по теореме Пифагора:  В последний момент движения конечная скорость тела:
В последний момент движения конечная скорость тела:

Угол между направлением скорости тела в любой момент движения и горизонталью можно определить из прямоугольного треугольника, образованного вектором скорости и его проекциями на оси координат (см. рис. 71):

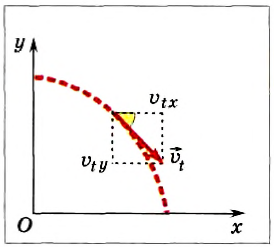
Рис. 71
Например, в последний момент движения:

Для описания движения тела, брошенного горизонтально, можно выбрать и другую систему отсчета. Попробуйте сделать это самостоятельно и описать движение тела в этой системе отсчета.
2) Движение тела, брошенного с начальной скоростью  , направленной под углом
, направленной под углом  , к горизонту, происходит по криволинейной траектории аналогично струе воды на рисунке 68.
, к горизонту, происходит по криволинейной траектории аналогично струе воды на рисунке 68.
Пусть в конце движения тело возвращается на тот же уровень относительно Земли, с которого начало движение.
Выберем начало отсчета в точке бросания тела (рис. 72). Векторы  ,
,  расположены в одной вертикальной плоскости, и, следовательно, тело будет двигаться по траектории, лежащей в этой же плоскости. Для описания его движения можно использовать только две оси декартовой системы координат Ox и Оу.
расположены в одной вертикальной плоскости, и, следовательно, тело будет двигаться по траектории, лежащей в этой же плоскости. Для описания его движения можно использовать только две оси декартовой системы координат Ox и Оу.
Тогда

и можно записать кинематические уравнения для координат точки и проекций ее скорости:


Из первых двух уравнений следует, что проекция скорости на ось Ox не зависит от времени, а координата x1 прямо пропорциональна времени, т. е. это кинематические уравнения равномерного движения.
Два последних выражения представляют собой кинематические уравнения равноускоренного движения.
Таким образом, сложное движение тела в плоскости можно представить как наложение двух простых, одномерных: равномерного вдоль оси Ox и равноускоренного вдоль оси Оу.
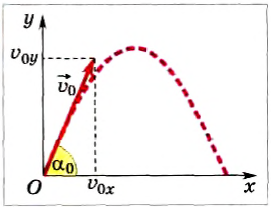
Рис. 72
Эти уравнения позволяют решить основную задачу механики: определить координаты тела в любой момент времени, а также рассчитать, например, время подъема на максимальную высоту и ее величину, все время движения и дальность полета тела, найти модуль скорости тела и ее направление в любой момент времени.
Получим уравнение траектории тела, выразив время из уравнения для координаты х1 и подставив в уравнение для координаты y1:

Так как  , то траектория тела — парабола (рис. 73), по касательной к которой направлена мгновенная скорость.
, то траектория тела — парабола (рис. 73), по касательной к которой направлена мгновенная скорость.
Найдем время подъема тела на максимальную высоту, используя уравнение для проекции скорости  , которая с начала движения убывает и в высшей точке подъема тела равна нулю:
, которая с начала движения убывает и в высшей точке подъема тела равна нулю:  . Отсюда
. Отсюда  . Следовательно, максимальная координата тела по оси Оу, или высота подъема:
. Следовательно, максимальная координата тела по оси Оу, или высота подъема:

Найдем все время движения, используя уравнение для координаты y1, которая в выбранной системе отсчета в последний момент движения равна нулю:
Это квадратное уравнение имеет два корня, первый из которых соответствует начальному моменту времени t0 = 0, а второй — всему времени движения тела:
Следовательно, все время движения вдвое больше времени подъема, или сколько времени тело поднимается на максимальную высоту, столько же и спускается с нее.
Можно показать, что это же будет справедливо при полете тела по параболе между двумя любыми уровнями по высоте вверх и при полете по параболической траектории между этими же двумя уровнями вниз.
В выбранной системе отсчета дальность полета тела — его конечная координата по оси Ох:

Модуль скорости тела в любой момент времени можно найти по теореме Пифагора: , а направление — из треугольника, образованного вектором скорости и его проекциями на оси координат (как показано на рисунке 71):
, а направление — из треугольника, образованного вектором скорости и его проекциями на оси координат (как показано на рисунке 71):

Например, в конечный момент времени:


Эти выражения показывают, что конечная скорость тела равна по модулю начальной и направлена к горизонту под углом, равным по модулю первоначальному.
Можно показать, что при движении по параболической траектории модуль скорости и модуль угла, который вектор скорости образует с горизонтом. на любом одном и том же уровне относительно Земли одинаковы.
Используя понятия нормального и тангенциального ускорений, можно рассчитать радиус кривизны параболической траектории в любой момент времени. Как уже обсуждалось, вектор полного ускорения можно разложить на сумму тангенциального и нормального ускорений.
Разложим вектор ускорения свободного падения на векторы тангенциального и нормального ускорений (рис. 74):  . Модули этих ускорений можно выразить через ускорение свободного падения и угол между направлением мгновенной скорости и горизонталью
. Модули этих ускорений можно выразить через ускорение свободного падения и угол между направлением мгновенной скорости и горизонталью  :
:
Так как  , то можно определить радиус траектории тела в любой момент времени:
, то можно определить радиус траектории тела в любой момент времени:

Если тело брошено под углом к горизонту с некоторой высоты над Землей, то необходимо вновь выбрать одну из систем отсчета и записать кинематические уравнения для координат и проекций скоростей, которые позволяют найти искомые величины.
Главные выводы:
- Если вектор начальной скорости тела лежит в вертикальной плоскости, но не коллинеарен вектору ускорения свободного падения, то тело движется по параболической траектории, расположенной в этой вертикальной плоскости.
- Сложное движение тела по параболической траектории можно представить в виде двух более простых движений: равноускоренного с вдоль вертикального направления и равномерного вдоль горизонтального направления.
- Во многих случаях при описании движения тела по параболической траектории выбор оптимальной системы отсчета позволяет более рационально математически найти искомые физические величины.
 вдоль вертикального направления и равномерного вдоль горизонтального направления.
вдоль вертикального направления и равномерного вдоль горизонтального направления.Вес тела
Силой веса  (весом) называется сила, с которой тело вследствие земного притяжения действует на опору или подвес, неподвижные относительно его.
(весом) называется сила, с которой тело вследствие земного притяжения действует на опору или подвес, неподвижные относительно его.
Под действием силы тяготения тело двигалось бы к Земле, но опора или подвес противодействуют силе притяжения. В результате этого в теле и опоре начинается процесс деформации, т. е. изменение формы и размеров. Этому процессу противодействуют силы взаимодействия между молекулами внутри вещества.
В механике для того, чтобы не рассматривать эти сложные межмолекулярные взаимодействия, вводят силу реакции опоры  (или подвеса
(или подвеса  ). Согласно третьему закону Ньютона вес и сила реакции опоры связаны соотношением
). Согласно третьему закону Ньютона вес и сила реакции опоры связаны соотношением  = –
= – и являются силами одной физической природы.
и являются силами одной физической природы.
Следовательно, сила веса отличается от силы тяжести тем, что ее возникновение обусловлено силой тяготения и межмолекулярными силами в веществе, а сила тяжести — гравитационная сила. Кроме того, сила тяжести приложена к телу, а сила веса — к опоре или подвесу.
Рассмотрим, от чего зависит сила веса, ведь опора или подвес могут и покоиться относительно Земли, и двигаться с какой-либо скоростью или ускорением.
Пусть, например, тело массой m подвешено на динамометре, прикрепленном к потолку лифта (рис. 75). По второму закону Ньютона: , где
, где  — сила, действующая на тело со стороны динамометра (подвеса), а ее модуль — это показание динамометра. По третьему закону Ньютона:
— сила, действующая на тело со стороны динамометра (подвеса), а ее модуль — это показание динамометра. По третьему закону Ньютона:  или P = F.
или P = F.
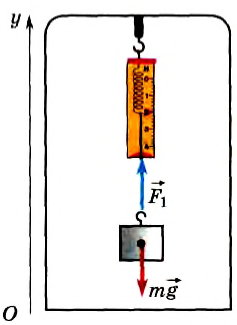
Рис. 75
Рассмотрим различные случаи движения лифта относительно инерциальной системы отсчета, связанной с Землей.
1) Пусть лифт покоится, и тогда ускорение лифта, подвеса и тела α = 0 (см. рис. 75). Спроецируем на ось Oy и выразим силу веса тела P1 в этом случае:

Тогда

т. е. динамометр показывает вес, равный по модулю силе тяжести.
Если лифт поднимается вертикально вверх или спускается вертикально вниз равномерно, то ускорение его и тела также равно нулю, и мы получим тот же результат.
Следовательно, при равномерном вертикальном движении подвеса с телом или когда вся система покоится, сила веса равна силе тяжести, направлена в ту же сторону, но приложена к подвесу (или опоре).
2) Пусть лифт поднимается с постоянным ускорением, направленным противоположно вектору ускорения свободного падения:  Так как тело с подвесом поднимается вместе с лифтом, то его ускорение такое же, и чтобы вектор
Так как тело с подвесом поднимается вместе с лифтом, то его ускорение такое же, и чтобы вектор  был направлен вверх, по второму закону Ньютона сила упругости должна быть больше силы тяжести (рис. 76).
был направлен вверх, по второму закону Ньютона сила упругости должна быть больше силы тяжести (рис. 76).
Для проекции на ось Оу:
Тогда
и

Динамометр в этом случае показывает силу веса большую, чем сила тяжести тела, и чтобы характеризовать это явление, вводят термин перегрузка.
Чаще всего количественно перегрузку определяют как отношение силы веса к силе тяжести тела:
Перегрузки — одна из особенностей работы летчиков при выполнении фигур высшего пилотажа, космонавтов при старте космического корабля, гонщиков, участвующих в соревнованиях скоростных автомобилей. Тренированный человек может без серьезных последствий кратковременно выдержать примерно шестикратную перегрузку. Например, при взлете космического корабля стартовое ускорение не должно превышать 5g.
3) Пусть лифт движется с ускорением, направленным так же, как и ускорение свободного падения  Тело движется с таким же ускорением
Тело движется с таким же ускорением  , и чтобы вектор та был направлен вниз, по второму закону Ньютона сила упругости должна быть меньше силы тяжести (рис. 77).
, и чтобы вектор та был направлен вниз, по второму закону Ньютона сила упругости должна быть меньше силы тяжести (рис. 77).
Для проекции на ось Оу.

Тогда

т. е. в данном случае динамометр покажет вес меньше, чем сила тяжести тела. Но если ускорение по модулю a > 2g, то вес вновь будет больше силы тяжести.
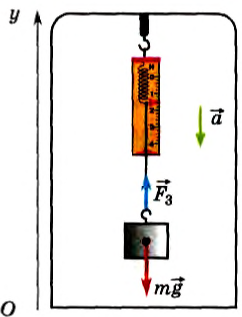
Рис. 77
Важно отметить, что при движении подвеса с ускорением, равным по модулю и направлению ускорению свободного падения  , вес тела будет равен нулю:
, вес тела будет равен нулю:

Чтобы охарактеризовать это явление, вводят понятие состояние невесомости, или невесомость, которое подразумевает отсутствие веса, так как тело с опорой или тело с подвесом движутся с ускорением свободного падения в пространстве вместе, но практически не взаимодействуют друг с другом (рис. 78).

Рис. 78
Так как тело не взаимодействует с опорой, то нет и деформации обоих тел.
Например, человек в условиях невесомости на космическом корабле испытывает особые ощущения, в его организме в определенной степени изменяются физиологические процессы. Это происходит потому, что человек на Земле всегда взаимодействует с какой-либо опорой, и, следовательно, все процессы в организме осуществляются при наличии деформации.
Например, деформация позвоночного столба при вертикальном положении человека приводит к тому, что в конце дня его рост меньше, чем утром.
Состояние невесомости при определенных условиях можно испытать в самолете. Если пренебречь сопротивлением воздуха, то можно считать, что на самолет, набравший скорость и движущийся с выключенными двигателями, действует только сила тяжести. При этих условиях для тел в самолете наблюдается состояние невесомости.
В некотором интервале можно подобрать такой угол между скоростью самолета и горизонтом в начальный момент движения, чтобы время безопасного полета с отключенными двигателями было достаточно для тренировки космонавтов или съемок эпизодов для кинофильмов.
Рассмотренные случаи отличия модуля веса от модуля силы тяжести возникают и при участии тела во вращательном движении. Например, вес тела, измеренный одним и тем же динамометром на полюсе Земли больше, чем вес этого тела на экваторе. Это связано с тем, что на экваторе тело вместе с динамометром и поверхностью Земли участвует во вращательном движении (рис. 79).
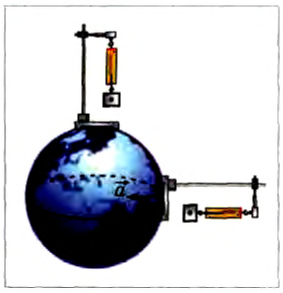
Рис. 79
Пусть  — сила тяготения. По третьему закону Ньютона
— сила тяготения. По третьему закону Ньютона  , где
, где  — показание динамометра. Так как тело покоится, то
— показание динамометра. Так как тело покоится, то

Следовательно, на полюсе вес тела равен по модулю силе тяжести.
На экваторе тело вместе с подвешенным к опоре динамометром движется с ускорением a = ω2R. где ω— угловая скорость вращения Земли, R — радиус Земли. Тело движется с этим ускорением под действием силы притяжения и силы со стороны динамометра:  По третьему закону Ньютона:
По третьему закону Ньютона:  . Запишем второй закон Ньютона для проекций:
. Запишем второй закон Ньютона для проекций:  Следовательно, на экваторе вес тела меньше:
Следовательно, на экваторе вес тела меньше:

Из полученной формулы видно, что если бы угловая скорость вращения Земли вдруг начала возрастать, то при определенном ее значении вес тел на экваторе стал бы равным нулю.
Рассмотренные примеры иллюстрируют, что при решении различных задач вес тела должен определяться в каждом конкретном случае на основании второго и третьего законов Ньютона.
Главные выводы:
- Модуль веса тела в общем случае не равен модулю силы тяжести.
- Модуль веса тела зависит от характера движения тела и опоры (подвеса) и их взаимного расположения.
- При совместном движении тела и опоры или подвеса с ускорением свободного падения наблюдается состояние невесомости.
Зависимость ускорения свободного падения от широты местности
До сих пор мы рассматривали простейшую модель, в которой приняли, что сила тяжести тела — это и есть сила его гравитационного взаимодействия с Землей. Но если сила тяжести совпадает с силой гравитационного тяготения, то она должна быть направлена вдоль радиуса Земли к ее центру.
На опыте направление силы тяжести можно определить по «отвесу» — направлению нити, на которой подвешен тяжелый груз. Например, каменщик, укладывая кирпичную стену, проверяет, вертикальна ли грань стены, именно таким способом (рис. 81).
Точные измерения показывают, что в каждой местности «отвесная линия» не совпадает с направлением на центр земного шара, т. е. направление силы тяжести не совпадает с направлением силы тяготения. Только на полюсах и экваторе земного шара сила тяжести направлена к его центру.
Как это можно объяснить?
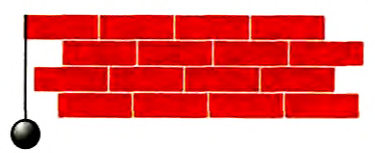
Рис. 81
Все точки поверхности Земли, за исключением полюсов, участвуют во вращательном движении вокруг земной оси.
Рассмотрим тело, лежащее в какой-то точке на поверхности Земли с широтой φ и участвующее вместе с ней в суточном вращении. Широтой данной точки местности, как известно, называется угол φ между радиусом Земли, проведенным в эту точку, и плоскостью экватора (рис. 82).
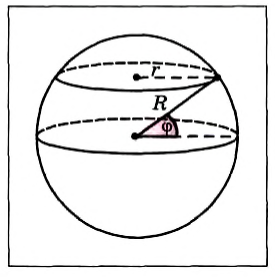
Рис. 82
Выберем начало инерциальной системы отсчета в центре земного шара, а оси координат направим на неподвижные звезды. Запишем закон всемирного тяготения, считая тело материальной точкой по сравнению с Землей:
где М – масса Земли, R — ее радиус, g0 — ускорение свободного падения на поверхности Земли без учета ее суточного вращения.
Тело движется по окружности радиуса r со скоростью  данной точки поверхности и центростремительным ускорением:
данной точки поверхности и центростремительным ускорением:
где ω — угловая скорость вращения Земли.
Для Беларуси, например, средние величины скорости вращения и центростремительного ускорения точек поверхности:
На покоящееся тело действуют сила тяготения со стороны Земли, направленная по радиусу к ее центру, и сила реакции опоры. По второму закону Ньютона: 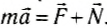 . Следовательно, вектор равнодействующей силы тяготения и реакции опоры должен быть направлен, как и ускорение, к центру окружности, по которой движется тело. Это возможно только в случае, когда сила реакции опоры направлена под некоторым углом к радиальному направлению (рис. 83).
. Следовательно, вектор равнодействующей силы тяготения и реакции опоры должен быть направлен, как и ускорение, к центру окружности, по которой движется тело. Это возможно только в случае, когда сила реакции опоры направлена под некоторым углом к радиальному направлению (рис. 83).
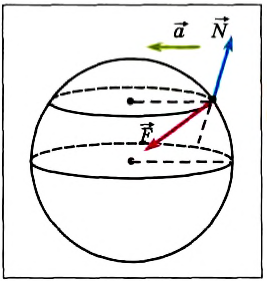
Рис. 83
В Солнечной системе вокруг многих планет вращаются космические тела, которые называют естественными спутниками.
По аналогии с этим любой объект, созданный руками человека и движущийся вокруг данного небесного тела, называют искусственным спутником. Для вывода спутника на орбиту необходима работа мощных двигателей, но при движении спутника по постоянной орбите двигатели на спутнике выключены. Почему же он движется по орбите?
Чтобы ответить на данный вопрос, давайте рассмотрим упрощенную модель движения
искусственного спутника. Будем считать, что он движется с постоянной по модулю скоростью по круговой орбите вокруг данной планеты в безвоздушном пространстве и только под действием ее сил тяготения (рис. 85). Силами тяготения со стороны других космических тел можно пренебречь.
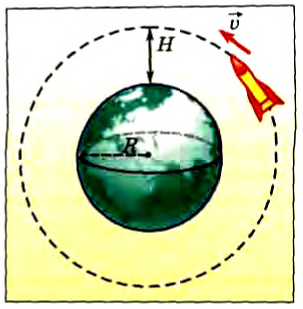
Рис. 85
Если нет сопротивления воздуха, а сила тяготения в любой момент перпендикулярна скорости движения, то создаваемое ею ускорение также перпендикулярно скорости и не может изменять ее модуль. Вот почему такой идеальный спутник должен бесконечно долго вращаться по своей орбите с выключенными двигателями. Реальные искусственные спутники Земли постепенно приближаются к ее поверхности, и в конце концов попадая в атмосферу, сгорают в ней.
Какова должна быть скорость спутника, чтобы он двигался по круговой орбите?
Определим эту скорость, считая, что спутник движется на высоте H над поверхностью однородной шарообразной планеты массы M и радиуса R. Так как движение происходит по окружности, то спутник имеет центростремительное ускорение:
которое ему сообщает сила тяготения:
и, следовательно.
Отсюда скорость движения спутника по орбите на высоте H над поверхностью:
Если использовать формулу для ускорения свободного падения вблизи поверхности планеты, то скорость спутника на высоте H от поверхности планеты равна:
Первой космической скоростью для планеты называется скорость, которую нужно сообщить спутнику, чтобы он двигался по круговой орбите вблизи поверхности планеты, т. е.  .
.
Тогда величина первой космической скорости определяется по формуле:
При движении спутников на высоте 200—300 км от поверхности Земли первая космическая скорость равна 7,9 .
.
Из приведенных формул следует, что, чем выше над поверхностью планеты расположена орбита спутника, тем меньше его скорость и тем больше его период обращения. Спутники с космонавтами летают на высоте 200—300 км и облетают нашу планету меньше чем за полтора часа. Спутники связи расположены на большом удалении от поверхности, летят с меньшей скоростью, чем первая космическая скорость.
Вы, наверное, часто слышали, что в открытом космосе и на спутнике космонавты находятся в состоянии невесомости, а по телевизору наблюдали их как бы плавающие движения в космическом корабле (рис. 86). Космонавты и все предметы движутся вместе со спутником по орбите под действием только силы тяготения Земли, т. е. находятся в свободном падении.
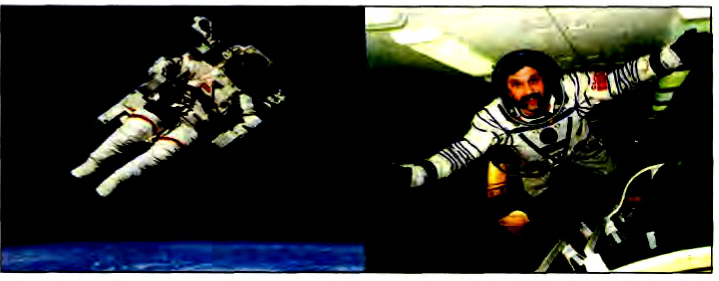
Рис. 86
Возможно ли это: спутник свободно падает и в то же время остается на постоянной орбите? Примем для простоты расчетов, что ускорение свободного падения равно 10  и скорость спутника 8000
и скорость спутника 8000  . Тогда за 1 с свободного падения спутник должен пройти по направлению к Земле расстояние h = 5 м и одновременно переместиться перпендикулярно этому направлению на 8000 м. В результате этих двух движений спутник движется по своей орбите (рис. 87).
. Тогда за 1 с свободного падения спутник должен пройти по направлению к Земле расстояние h = 5 м и одновременно переместиться перпендикулярно этому направлению на 8000 м. В результате этих двух движений спутник движется по своей орбите (рис. 87).
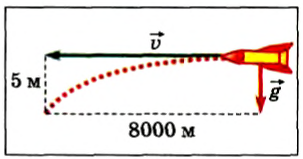
Рис. 87
Главные выводы:
- Движение искусственных спутников по орбите происходит только под действием силы тяготения.
- Скорость спутника на круговой орбите зависит от массы планеты, ее радиуса и высоты спутника над поверхностью планеты. Первая космическая скорость определяется только массой и радиусом планеты.
- Невесомость на спутнике объясняется тем, что в любой момент времени он движется с ускорением свободного падения для данной точки пространства.
Сила упругости
Как вы уже знаете, одно из проявлений взаимодействия тел — их деформация, т. е. изменение формы и размеров, происходящее из-за неодинакового смещения различных частей одного тела в результате воздействия другого тела.
Почему деформации неодинаковы у различных тел? Какую роль они играют во взаимодействии тел и в механическом движении?
Чтобы ответить на первый вопрос, вспомним, что вы узнали о строении вещества при изучении физики в 8-м классе.
Все вещества состоят из частиц (молекул, атомов, ионов), между которыми существуют силы взаимодействия. Это силы электромагнитной природы, которые в зависимости от расстояния между частицами проявляются то как силы притяжения, то как силы отталкивания.
Если воздействие на тело вызывает увеличение расстояния между молекулами, то силы межмолекулярного притяжения препятствуют этому. Уменьшению расстояния между молекулами противодействуют силы отталкивания. Чтобы не рассматривать сложные электромагнитные взаимодействия, в механике для характеристики этих явлении вводят силу упругости  .
.
Силой упругости называется сила, возникающая при деформации любых твердых тел, а также при сжатии жидкостей и газов.
Какую роль играет эта сила при взаимодействии тел?
Проделаем следующий опыт. Возьмем толстый кусок поролона, нарисуем по его торцу горизонтальные линии на одинаковом расстоянии друг от друга, а затем, медленно опуская, поставим на него груз (рис. 88, а).
Если смотреть во время опускания груза на торец поролона, то хорошо видно, как при сжатии поролона под действием груза сближаются между собой линии, но лишь до определенного расстояния (рис. 88, б). Движение груза прекращается при некоторой деформации поролона, т. е. сила упругости уравновешивает силу тяжести.
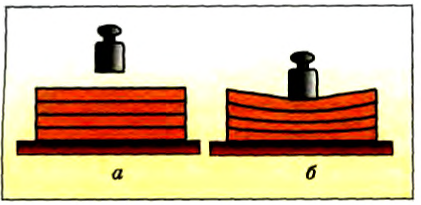
Рис. 88
Также же наблюдения можно провести, подвешивая груз на резиновой ленте с нанесенными на ней линиями. При подвешенном грузе расстояние между линиями на ленте больше.
Мы взяли для опытов поролон и резиновую ленту, потому что для этих тел под действием даже небольших сил наблюдается значительная деформация и ее легко наблюдать.
Аналогичные явления происходят при любых взаимодействиях тел, но часто деформации так малы, что их можно зафиксировать только с помощью очень чувствительных приборов.
Проведем еще один опыт (рис. 89, а). Прикрепим к бруску, лежащему на столе, резиновый шнур (с метками на одинаковом расстоянии друг от друга) и медленно начнем тянуть его в горизонтальном направлении.
Под действием силы шнур растягивается, и только когда весь шнур растянется на некоторую величину, брусок придет в движение. Как это объяснить?
При растяжении шнура происходит смещение одних его частей относительно других, в результате чего в шнуре возникает сила упругости, равная но величине деформирующей силе. C этого момента шнур играет роль «передающего звена» (рис. 89. б).
Такие же явления всегда происходят, когда движение от одного тела к другому передается при помощи «связей», т. е. нитей, шнуров, пружин, тросов, различных сцепок и т. п.
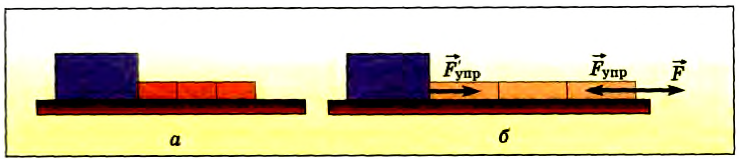
Рис. 89
По характеру смещения частей тела (а вернее, молекулярных слоев внутри его) друг относительно друга различают деформации: растяжения, сжатия, изгиба, кручения, сдвига.
При деформации растяжения расстояние между молекулярными слоями увеличивается (рис. 90, а), а при деформации сжатия — уменьшается (рис. 90, б). Деформацию растяжения испытывают тросы подъемных кранов, канатных дорог, буксирные тросы, струны музыкальных инструментов. Сжатию подвергаются стены и фундаменты зданий.
Если в результате воздействия одни молекулярные слои растягиваются, а другие сжимаются, то наблюдается деформация изгиба (рис. 90, в). Деформацию изгиба испытывают балки перекрытий в зданиях и мостах.
При деформации кручения происходит поворот одних молекулярных слоев относительно других (рис. 90, г).
Если одни слои молекул смещаются относительно других, то происходит деформация сдвига (рис. 90, б).
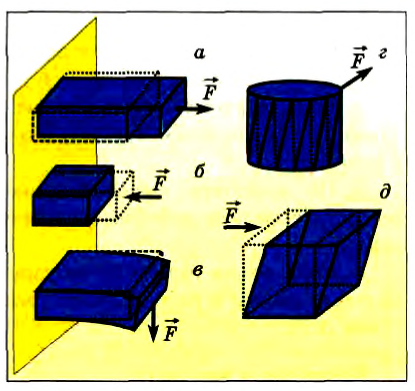
Рис. 90
Деформации также разделяют на упругие и неупругие, или пластичные.
Деформация называется упругой, если после прекращения воздействия тело полностью восстанавливает первоначальные форму и размеры, а если этого не происходит, то деформация называется неупругой или пластичной.
Конечно, деформация конкретного тела может быть как упругой, так и неупругой, так как ее характер зависит не только от свойств тела, но и от величины воздействия на него. Например, при больших воздействующих силах и стальная линейка потеряет форму, а при очень малых — и пластилин восстановит свою форму.
Главные выводы:
- Сила упругости возникает при изменении формы и размеров твердых тел, а также при сжатии жидкостей и газов.
- Силы упругости, возникающие в нитях, подвесах, опорах и других «связях>, обеспечивают передачу воздействия или движения от одного тела к другому.
- По характеру смещения молекулярных слоев друг относительно друга выделяют деформации: растяжения, сжатия, изгиба, кручения и сдвига.
- Деформации разделяют на упругие и пластичные по степени восстановления формы и размеров тела после прекращения действия деформирующей силы.
Закон Гука
Различные виды деформаций возникают в любых сооружениях и механизмax, и необходимо установить законы, которые позволят рассчитать величину тих деформаций.
Наиболее часто встречаются и достаточно просто математически описываются упругие деформации растяжения или сжатия.
Проведем опыт, прикрепив один конец резинового шнура с метками к вертикальной стенке, а другой — к динамометру (рис. 91, а), на который будем действовать силой. Расположим под шнуром линейку. Определяя силу, действующую на конец шнура, по динамометру, будем фиксировать смещение конца JHypa вдоль линейки и изменение расстояний между метками.
Мы заметим, что общее удлинение шнура, определяемое по смещению его конца, является суммой удлинений всех его частей. Аналогично общее укоронение, например при сжатии пружины, является суммой уменьшений расстояний между всеми ее витками (рис. 91,6).
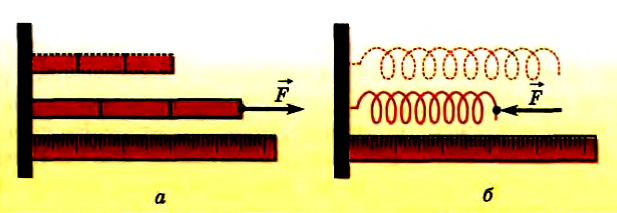
Рис. 91
Если обозначить начальную длину шнура L0, а конечную длину — L, то для характеристики деформаций растяжения или сжатия можно ввести абсолютное удлинение △L = |L – L0|.
Если шнур под действием деформирующей силы  больше не удлиняется, то ее действие уравновешивает упругая сила
больше не удлиняется, то ее действие уравновешивает упругая сила  , т. е.
, т. е.  .
.
Роберт Гук установил экспериментально. что при малых деформациях растяжения или сжатия абсолютное удлинение тела прямо пропорционально деформирующей силе. На практике часто необходимо определить силу упругости, возникающую в теле при его деформации, и закон Гука формулируется следующим образом:
модуль силы упругости, возникающей при малых деформациях сжатия или растяжения тела, прямо пропорционален величине абсолютного удлинения:

где k — коэффициент пропорциональности, называемый жесткостью тела.
Жесткость является характеристикой данного тела (пружины, шнура, стержня и т. п.) и зависит от его поперечных и продольных размеров, химического состава и строения вещества, из которого тело изготовлено. Так как  , то жесткость измеряется в ньютонах на метр
, то жесткость измеряется в ньютонах на метр  .
.
При расчетах движения тел под действием силы упругости необходимо учитывать ее направление. Если выбрать начало отсчета под крайней точкой недеформированного тела (рис. 92), то абсолютное удлинение можно характеризовать координатой х конца деформированного тела. При растяжении (см. рис. 92, а) и при сжатии (см. рис. 92, б) образца сила упругости направлена противоположно смещению его конца. Тогда можно записать закон Гука для проекции силы упругости на выбранную ось:
Ту или иную форму записи закона Гука используют в зависимости от условия задачи и величины, которую нужно определить. Сила упругости, как и любая из сил, рассматриваемых в механике, подчиняется законам Ньютона, а по закону Гука можно рассчитать деформации, возникающие при взаимодействиях тел. Однако необходимо отметить, что закон Гука хорошо выполняется только при малых деформациях тел.
Главные выводы:
- При упругих деформациях растяжения и сжатия абсолютное удлинение прямо пропорционально деформирующей силе.
- При упругих деформациях сила упругости прямо пропорциональна абсолютному удлинению.
- Жесткость тела зависит от его поперечных и продольных размеров, химического состава и строения вещества, из которого изготовлено тело.
Механические свойства тел
Для строительства зданий, мостов, самолетов, автомобилей необходимо знать механические свойства используемых материалов: дерева, бетона, стали, алюминия и т. п. Нужно также учитывать поведение этих веществ при больших деформациях, способных привести к разрушениям.
При деформации по всему объему тела возникают упругие силы, т. е. тело находится в напряженном состоянии. Для характеристики этого состояния вводят механическое напряжение — физическую величину, равную отношению модуля силы упругости к площади поперечного сечения тела:

Эта величина численно равна силе упругости, возникающей в единичном сечении тела, и измеряется в ньютонах на квадратный метр  или в паскалях (Па), как давление.
или в паскалях (Па), как давление.
На практике вы сталкивались с тем, что абсолютное удлинение зависит от начальных размеров тела, например, под действием одной и той же силы длинный резиновый шнур растягивается больше, чем короткий (рис. 93).
Поэтому вводят относительное удлинение:

которое показывает, на какую долю первоначальной длины тела изменяется каждая ее единица. В некоторых случаях относительное удлинение выражают в процентах.
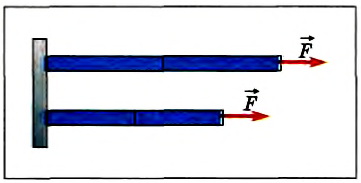
Рис. 93
При исследовании растяжений различных тел было обнаружено, что наблюдается сложная зависимость напряжения от относительного удлинения тела, называемая диаграммой растяжения (рис. 94). Обсудим, какие процессы в деформируемом теле отражают различные участки этой диаграммы.
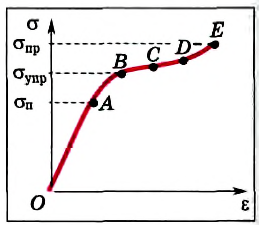
Рис. 94
На участке OA напряжение прямо пропорционально относительному удлинению, и если воздействие прекратилось, то тело восстанавливает свою форму и размеры, т. е. происходит упругая деформация. На практике такая зависимость наблюдается при небольших относительных деформациях и только до определенного напряжения σn, которое называется пределом пропорциональности.
На участке AB такая зависимость нарушается, но до некоторого напряжения, называемого пределом упругости σynp: после прекращения воздействия размеры и форма тела полностью восстанавливаются.
При напряжениях, превышающих предел упругости, наблюдается пластичная деформация (участок BD). На участке CD деформация происходит почти без увеличения напряжения. Это явление называется текучестью материала, а образцы, для которых область текучести велика, могут без разрушения выдерживать большие деформации.
Материалы, у которых область текучести почти отсутствует, являются хрупкими. Они разрушаются даже при небольших деформациях. Хрупкость характерна для стекла, кирпича, бетона, чугуна.
Точка диаграммы E соответствует напряжению, называемому пределом прочности σпp, при дальнейшей деформации образец разрушается.
Зависимость, отраженная на диаграмме участком OA. соответствует закону Гука в другой форме:
механическое напряжение в упруго деформированном теле прямо пропорционально относительной деформации:
где E — модуль продольной упругости, который в честь ученого Томаса Юнга называется модулем Юнга и является характеристикой вещества, из которого сделано тело. Так, модуль продольной упругости живого дерева (рис. 95) больше, чем сухого дерева (рис. 96). Так как относительная деформация безразмерная величина, то модуль Юнга измеряется, как и механическое напряжение, в паскалях (Па).
Как видно из формулы, модуль Юнга численно равен напряжению, возникающему в теле при относительной деформации, равной единице, т. е. при увеличении длины образца вдвое, так как при  , L-L0=L0 и L=2L0 .
, L-L0=L0 и L=2L0 .
Если использовать соответствующие формулы для напряжения и относительного удлинения, то установленную зависимость для модуля силы упругости можно записать следующим образом:
Сравнив с записью закона Гука, получим выражение для жесткости:

которое поясняет зависимость жесткости тела от его начальных размеров и свойств вещества.
Для некоторых тел, например стержней, нитей, тросов, при небольших деформациях площадь поперечного сечения практически остается постоянной, и закон Гука для модуля силы упругости можно использовать в форме:
Модуль упругости и предел прочности различных веществ можно узнать в справочниках.
Главные выводы:
- Механическое напряжение вводится для характеристики сил упругости, возникающих в теле.
- Для различных тел на опыте установлена сложная зависимость механического напряжения от относительной деформации, называемая диаграммой напряжения.
- Модуль упругости вещества определяется его химическим составом и строением.
Силы сопротивления движению
Как вы уже знаете, взаимодействие различных тел может либо вызывать движение конкретного тела, либо препятствовать ему. Например, если мы дуем в сторону легкого листа бумаги на столе, то заставляем двигаться воздух, а тот, в свою очередь, приводит в движение бумагу. Если мы поднимем тот же лист и отпустим, то он начнет двигаться под действием силы тяжести, а воздух будет препятствовать этому движению (рис. 97).
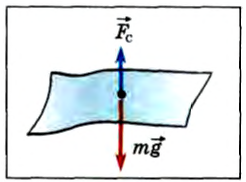
Рис. 97
На практике все силы сопротивления движению разделяют на силы сухого (внешнего) трения (покоя, скольжения и качения), которые возникают при взаимодействии соприкасающихся твердых тел друг с другом, а также силы вязкого трения, проявляющиеся при движении тела в жидкости или газе.
Рассмотрим на опыте, как проявляется и от чего зависит сила трения покоя. К бруску, лежащему на горизонтальной поверхности, прикрепим динамометр, на который будем действовать в горизонтальном направлении (рис. 98).
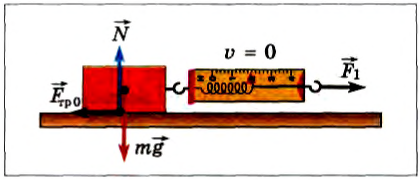
Рис. 98
Потянем слегка за динамометр, но так, чтобы брусок оставался в покое. Отметим показание прибора и проанализируем результаты нашего действия.
Так как брусок покоится, то по второму закону Ньютона векторная сумма всех сил, действующих на него, равна нулю. Сила тяжести уравновешивается силой упругости стола в вертикальном направлении.
Следовательно, и в горизонтальном направлении воздействие динамометра на брусок должно быть компенсировано какой-то силой. При изучении физики в 7-м классе вы узнали, что так проявляется сила трения покоя  . Почему она возникает?
. Почему она возникает?
Под микроскопом на поверхности любого твердого тела хорошо видны разнообразные выступы и впадины (рис. 99).
рис. 99
Многочисленные неровности соприкасающихся поверхностей цепляются друг за друга, деформируются и препятствуют относительному перемещению тел. Кроме того, расстояние между молекулами, расположенными на выступах соприкасающихся поверхностей, мало, и поэтому возможно электромагнитное взаимодействие молекул.
Все эти сложные взаимодействия в механике характеризуются силой трения покоя, или силой трения сцепления.
Уменьшится ли сила трения покоя, если отшлифовать поверхность тел? Да, уменьшится, но только до определенной степени шлифовки, а при дальнейшей обработке сила трения покоя возрастает. Это происходит потому, что по мере сглаживания неровностей соприкасающихся поверхностей в значительной мере увеличивается число межмолекулярных взаимодействий.
Продолжим опыт, постепенно увеличивая силу воздействия. Показания динамометра увеличиваются, а тело еще покоится, следовательно, и сила трения покоя тоже возрастает. В этом основная особенность силы трения покоя.
Сила трения покоя равна по модулю и направлена противоположно силе, приложенной к покоящемуся телу параллельно поверхности соприкосновения его с другим телом:

Если еще увеличивать действующую силу, то при определенном показании динамометра тело начнет двигаться. Это значит, что существует определенная максимальная сила трения покоя, и действующая сила должна ее превысить, чтобы тело приобрело ускорение.
Вы знаете, что наиболее трудно на практике сдвинуть с места тяжелые предметы. Давайте выясним, почему это так.
Поставим на брусок добавочный груз и измерим максимальную силу трения покоя (рис. 100). Ее численное значение увеличивается. При добавлении еще одного груза сила трения покоя вновь возрастает.
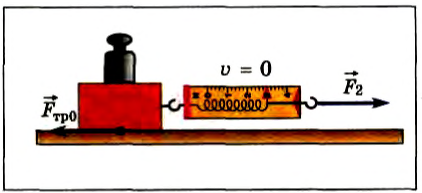
Рис. 100
Снимем с бруска грузы и подействуем на него добавочной силой вертикально вниз (рис. 101). Сила трения покоя также увеличивается. Как объяснить эти опыты?
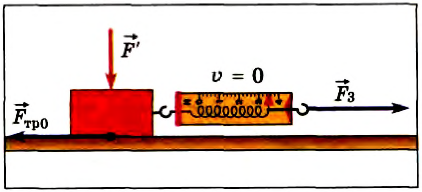
Рис. 101
При добавлении грузов, как и при воздействии вертикальной силой, увеличивается сила давления бруска на опору. Опыт показывает, что модуль максимальной силы трения покоя прямо пропорционален силе давления тела на опору:
 ,
,
Где μ0 — коэффициент трения покоя, F1 — сила давления тела на опору.
Коэффициент трения покоя зависит от веществ, из которых изготовлены соприкасающиеся тела, и степени обработки их поверхностей.
Сила трения покоя удерживает тело, лежащее на наклонной плоскости (рис. 102), а также брусок, прижимаемый к вертикальной стене (рис. 103). Чем тяжелее брусок, тем больше должна быть сила трения покоя, чтобы уравновешивать силу тяжести. Поэтому тяжелый брусок приходится прижимать к стене со значительной по модулю силой.
По третьему закону Ньютона  , где
, где  — сила нормальной реакции опоры, действующая на тело. Так как
— сила нормальной реакции опоры, действующая на тело. Так как  , то часто используют формулу:
, то часто используют формулу:
Возникает вопрос: всегда ли сила трения покоя препятствует движению? Нет, не всегда. Во многих случаях сила трения покоя способствует движению.
Например, кирпич, неподвижно лежащий на ленте транспортера, движется вместе с ней, потому что на него со стороны ленты действует сила трения покоя (рис. 104).
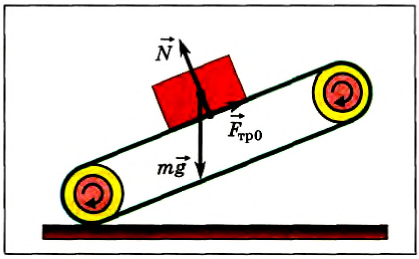
Рис. 104
Ведущее колесо автомобиля, если не пробуксовывает, действует на опору против направления движения с силой  . По третьему закону Ньютона со стороны опоры на него действует сила трения покоя
. По третьему закону Ньютона со стороны опоры на него действует сила трения покоя  , вызывающая движение (рис. 105):
, вызывающая движение (рис. 105):
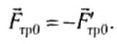
Рис. 105
При ходьбе сила трения покоя дает возможность человеку толкнуть опору с некоторой силой. По третьему закону Ньютона на человека действует такая же по величине и противоположная по направлению сила.
Трение покоя позволяет человеку брать руками различные тела, например топор, лопату, руль велосипеда или автомобиля, а также управлять движением этих тел, использовать их для совершения работы.
Главные выводы:
- Сила трения покоя (сцепления) всегда направлена параллельно поверхности соприкосновения двух тел и противоположно силе, стремящейся вывести это тело из состояния покоя.
- Модуль силы трения покоя может быть различен и в данный момент равен модулю силы, стремящейся вывести тело из состояния покоя.
- Максимальная сила трения покоя, действующая на тело со стороны опоры, прямо пропорциональна силе нормального давления тела на данную опору.
Силы трения скольжения и качения
Термин «скольжение» в физике используется для описания движения одного тела по поверхности другого тела.
Рассмотрим равномерное движение бруска по горизонтальной поверхности доски (рис. 106), т. е. его скольжение по опоре. Мы действуем с определенной горизонтальной силой на динамометр, а он передает наше воздействие бруску и показывает модуль действующей на брусок силы. Если скорость бруска постоянна, то силу, вызывающую движение, должна компенсировать сила взаимодействия бруска с опорой.

Рис. 106
При изучении физики в 7-м классе вы узнали, что эта сила называется силой трения скольжения. Она возникает из-за электромагнитного взаимодействия молекул на неровностях соприкасающихся поверхностей, зацепления неровностей и их пластичной деформации при относительном движении тел.
Из эксперимента следует, что сила трения скольжения, действующая на тело, направлена противоположно направлению его движения. По третьему закону Ньютона на опору при движении тела действует сила трения скольжения Eτp, направленная в сторону движения тела.
Поместим на брусок груз такой же массы и будем тянуть горизонтально динамометр так, чтобы брусок с грузом двигался равномерно (рис. 107). Динамометр при этом покажет вдвое большую силу. Если еще увеличить массу бруска, то сила трения скольжения также возрастет.
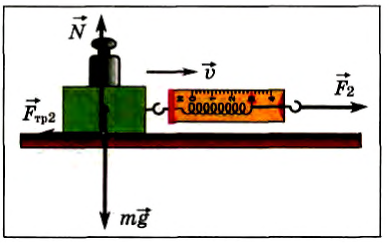
Рис. 107
Опыты показывают, что модуль силы трения скольжения прямо пропорционален модулю силы нормального давления:
где μ — коэффициент трения скольжения. Так как по третьему закону Ньютона Fд = N, то можно записать

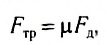
Рассмотрим равномерное движение бруска с грузом по другой стороне доски, более шероховатой (рис. 108). При постоянной скорости движения динамометр показывает большую силу, хотя сила нормального давления не изменилась. Значит, изменился коэффициент трения скольжения, и именно он зависит от качества обработки соприкасающихся поверхностей.
Если заменить доску листом стекла или другого материала, то показания динамометра снова изменятся, т. е. коэффициент трения зависит от свойств обоих веществ соприкасающихся поверхностей.
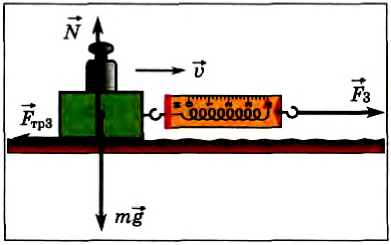
Рис. 108
Однако опыт показывает, что коэффициент трения не зависит от относительного положения тел. Например, коэффициент трения льда по железу такой же, как и железа при скольжении по льду.
Зависит ли коэффициент трения от площади соприкосновения тел? Если сравнить показания динамометра при равномерном движении бруска в различных положениях (рис. 109), то оказывается, что показания во всех трех случаях совпадают, т. е. коэффициент трения не зависит от площади соприкосновения тел.
Рис. 109
Вы знаете из личного опыта, что сдвинуть тело с места труднее, чем перемещать его с постоянной скоростью. Многочисленные эксперименты показывают, что действительно при движении с малыми скоростями величина силы трения скольжения немного меньше величины максимальной силы трения покоя и практически не зависит от скорости тела.
Это объясняется тем, что коэффициент трения скольжения в большинстве случаев немного меньше коэффициента трения покоя. Так как различия невелики, то при решении задач коэффициенты трения принимают равными по величине и обозначают одной буквой μ. Поэтому силу трения скольжения в большинстве задач считают постоянной и приближенно равной максимальной силе трения покоя.
Одним из достижений в истории человечества считается изобретение несколько тысяч лет назад такого привычного для нас колеса. Если вращающиеся колесо или шар участвуют и в поступательном движении по какой-то поверхности, то возникает сила сопротивления движению, которую называют силой трения качения. Чтобы объяснить причины ее возникновения, рассмотрим качение тяжелого цилиндра по куску поролона, деформация которого при этом хорошо наблюдается (рис. 110).
Цилиндр соприкасается с поролоном на очень малой площади, а значит, оказывает на него достаточно большое давление. Поролон при этом деформируется.
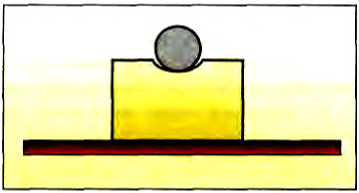
Рис. 110
Вследствие этой деформации перед катящимся цилиндром возникает как бы горка. Для характеристики этого явления в механике вводят силу трения качения.
Чем более пластична возникающая деформация, тем больше сила трения качения. Если цилиндр катится по такой поверхности, что ее деформация упруга и незначительна, то сила трения качения невелика. Она во много раз меньше силы трения скольжения, которая возникала бы только при поступательном движении этого же тела.
В таких случаях при относительном движении тел выгоднее скольжение заменить качением, и поэтому используют колеса для транспорта и подшипники в различных механизмах.
Если при движении происходит значительная деформация тела и опоры или только опоры, то сила трения качения велика, и поэтому, например, зимой у телеги заменяют колеса на полозья.
Главные выводы:
- Сила трения скольжения препятствует движению, всегда направлена противоположно относительной скорости тела.
- Модуль силы трения скольжения прямо пропорционален модулю силы нормального давления тела на опору.
- Коэффициент трения скольжения зависит от свойств веществ соприкасающихся поверхностей, степени их обработки и не зависит от взаимного расположения поверхностей и площади их соприкосновения.
- Сила трения качения намного меньше силы трения скольжения, если деформации взаимодействующих при движении тел очень малы.
Вязкое трение
При движении твердого тела в жидкости или газе также возникает сила сопротивления движению, которую в этих случаях называют силой жидкого или вязкого трения.
Экспериментально установлено, что сила, действующая на движущееся тело в жидкости или газе, также направлена в сторону, противоположную движению, но численно она во много раз меньше силы трения скольжения при небольших скоростях движения.
В отличие от сухого трения для тела в жидкости или газе отсутствует сила трения покоя и даже самая маленькая сила, приложенная к телу, вызывает его движение, если этому не препятствуют другие силы. Следовательно, сила вязкого трения не противодействует возникновению движения, и поэтому в механизмы вводят разнообразные смазки для движущихся друг относительно друга частей.
Проведем опыт. Возьмем два одинаковых тетрадных листа и отпустим в горизонтальном положении с одной высоты (рис. 111, а). Листы плавно и почти одновременно упадут на пол. Сделаем из одного листа плотный и маленький комок, а другой лист просто сомнем и повторим опыт. Первым упадет маленький комок (рис. 111, б). Как вы думаете, почему, ведь массы листов одинаковы?
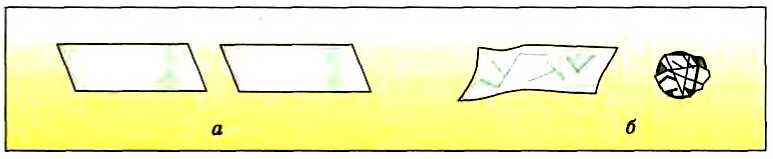
Рис. 111
Да, вы правы, сопротивление воздуха движению тел зависит от их формы и размеров. На рисунке 112 показаны тела различной формы: диск, шар и каплеобразное тело, у которых площади одного из поперечных сечений одинаковы.
При движении этих тел в жидкости или газе в направлении, перпендикулярном этому сечению, наибольшая сила вязкого трения действует на плоскую шайбу, а наименьшая — на тело каплеобразной формы.
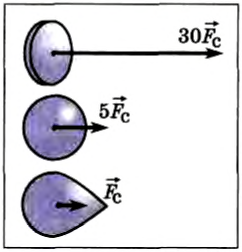
Рис. 112
Форму тела, при которой сила вязкого трения (сопротивления) мала, называют обтекаемой и ее стараются придать телам, движущимся в жидкости или газе. Обтекаемую форму имеют ракеты и самолеты, подводные лодки и скоростные автомобили.
Установлено, что сила вязкого трения зависит от скорости движения тела. При малых скоростях ее модуль прямо пропорционален скорости движения тела относительно среды:
Fc=k1υ,
Где k1 — коэффициент сопротивления, зависящий от формы, размеров тела, состояния его поверхности и свойств среды.
При больших скоростях движения модуль силы сопротивления пропорционален квадрату скорости:
Fc=k2υ2,
Это объясняется тем, что при большой скорости тела возникают сложные движения слоев среды. и поэтому появляется добавочное сопротивление.
Качественный график зависимости проекции силы сопротивления на направление скорости от модуля скорости представлен на рисунке 113. Сила сопротивления всегда направлена противоположно скорости. Если скорость невелика, то сила сопротивления линейно зависит от скорости, а при больших скоростях график имеет вид параболы.
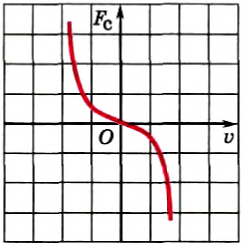
Рис. 113
Следовательно, при ускоренном движении тела в жидкости или газе, на пример под действием силы тяжести, вместе с ростом скорости растет и сила вязкого трения. При некотором значении скорости тела сила вязкого трения становится равной его силе тяжести, и затем тело движется с установившейся скоростью, тем большей, чем больше сила тяжести тела.
Например, размеры и форма парашюта подбираются с таким расчетом, чтобы скорость установившегося движения была безопасной для человека при его приземлении — около 6  ∙. При нераскрытом парашюте сила вязкого трения станет равной силе тяжести только при весьма большой скорости падения — около 50-60 .
∙. При нераскрытом парашюте сила вязкого трения станет равной силе тяжести только при весьма большой скорости падения — около 50-60 .
Учет всех сил сопротивления на практике достаточно сложен, поэтому при решении задач нужно внимательно прочесть условие и оценить, какой вид трения необходимо учесть и каким в данных условиях можно пренебречь.
Главные выводы
- Сила вязкого трения при малых скоростях пропорциональна модулю скорости, а при больших — квадрату модуля скорости тела.
- Сила вязкого трения зависит от формы тела. Форму тела, при которой сила сопротивления движению (вязкого трения) минимальна, называют обтекаемой.
- Сила вязкого трения, как правило, много меньше силы трения скольжения, и поэтому в различных механизмах используют смазку.
- Сила тяжести в физике
- Сила упругости в физике и закон Гука
- Деформация в физике
- Плотность вещества в физике
- Звуковые и ультразвуковые колебания
- Инерция в физике
- Масса тела в физике
- Сила в физике
Сила трения
![]()
F — сила трения, Н;
N — сила реакции опоры, Н;
μ — коэффициент трения.
Сила тяжести формула:
![]()
F — сила тяжести Н;
g – коэффициент силы тяжести (постоянная величина), м/с2
m — масса тела, кг.
Гравитационная сила формула:
F — гравитационная сила, Н;
G — гравитационная постоянная, Н·м2/кг2;
m1 — масса первого тела, , кг;
m2 — масса первого тела, , кг;
r — расстояние между m1 и m2, кг;
Формула механической работы:
![]()
А — механическая работа, Дж;
F — сила, Н;
S — перемещение тела под действием силы, м;
α — угол между вектором перемещения и вектором силы.
Формула мощности

N — мощность, Вт;
А — работа, Дж;
t — время выполнения работы, c.
Формула для расчета силы рычага

F1 и F2 — силы, действующие на рычаг, Н;
l1 и l2 — плечи сил F1 и F2, м.
Формула давления

р — давление, Па;
F — сила, действующая на поверхность, Н, F=mg;
S — площадь поверхности, м2.
Закон Гука — формула
![]()
Fупр – сила упругости, Н/м;
k – жесткость пружины, Н/м;
Δl- удлинение, м.
Формула механического напряжения
 F – сила упругости, Н/м;
F – сила упругости, Н/м;
σ — механическое напряжение, Н/м2, Па;
S – площадь поверхности (поперечного сечения), м2;
Закон Гука через модуль Юнга (прочность твердых дел) формула
![]()
σ — механическое напряжение, Н/м2, Па;
E — модуль Юнга (упругости), Па, Н/м2;
ε – относительное удлинение.
Относительное удлинение — формула

ε – относительное удлинение;
l0 – начальная длина, м;
Δl – абсолютное удлинение, м.
Отсюда сила упругости рассчитывается по формуле:
 Fупр – сила упругости, Н;
Fупр – сила упругости, Н;
l0 —изменение его длины, м;
Δl – абсолютное удлинение, м;
s – площадь поверхности, м2;
E — модуль Юнга (упругости), Н/м2
Коэффициент пропорциональности — жесткости формула

k — коэффициент пропорциональности ( жесткость), Н/м;
Δl – абсолютное удлинение, м;
Fупр – сила упругости, Н.
Формула силы Архимеда:
![]()
Fарх – сила Архимеда, Н.
g – коэффициент силы тяжести (постоянная величина), м/с2
Vт – объем тела, м3;
ρж – плотность жидкости, кг/м3
Формула для определения давления жидкости на дне сосуда:
![]()
g – коэффициент силы тяжести, м/с2;
ρ – плотность жидкости, кг/м3;
h — высота столба жидкости, м.
Закон Паскаля — формула
p1=p2
F — сила, Н;
S – площадь поршня, м2.
Потенциальная энергия — формула
![]() Eп — потенциальная энергия, Дж;
Eп — потенциальная энергия, Дж;
m – масса, кг;
g – коэффициент силы тяжести, м/с2;
h — высота, м.
Потенциальная энергия пружины — формула
 Eп — потенциальная энергия, Дж;
Eп — потенциальная энергия, Дж;
k – жесткость пружины, Дж/м2;
Δx — удлинение, м.
Кинетическая энергия формула
 Eк — кинетическая энергия, Дж;
Eк — кинетическая энергия, Дж;
m – масса, кг;
v – скорость, м/с.
Полная механическая энергия — формула
W=Eк+Eп
Формула КПД механической работы
η — КПД;
Aп – полезная механическая работа, Дж;
Aз –затраченная механическая работа, Дж.
Формула относительная влажность воздуха φ:
 φ — относительная влажность воздуха, %;
φ — относительная влажность воздуха, %;
ρ — абсолютная влажность воздуха, кг/м3;
ρ0 — плотность насыщенного водяного пара, кг/м3.
Формула КПД теплового двигателя
Aп — полезная работа;
Q1 – количество теплоты, полученное от нагревателя.
Формула момента сил![]()
M — момента сил, H·м;
F — сила, Н;
l — плечо, м.
Вес тела
Вес тела в покое определяется по формуле:
p=mg
Вес тела, если опора движется с ускорением вверх
p=m(g+a)
Вес тела, если опора движется с ускорением вниз.
p=m(g-a)
При a=g, возникает невесомость
Вес тела при движении по вогнутой траектории:
Вес тела при движении по выпуклой траектории.
P — вес тела, Н;
m — масса тела, кг;
r — радиус, м;
v — скорость, м/с.
Формулы равномерного и равноускоренного движения
Законы Ньютона
Сила тяжести и ускорение свободного падения
Закон сохранения импульса
Закон всемирного тяготения
Движение тела брошенного под углом к горизонту
Равномерное движение тела по окружности
Механическая работа и мощность
У этого термина существуют и другие значения, см. Сила.
| Сила | |
|---|---|
 |
|
| Размерность | LMT−2 |
| Единицы измерения | |
| СИ | ньютон |
| СГС | дина |
| Примечания | |
| векторная величина |
| Классическая механика |
|---|
| История… |
|
Фундаментальные понятия
|
|
Формулировки
|
|
Разделы
|
|
Учёные
|
| См. также: Портал:Физика |
Си́ла — физическая векторная величина, являющаяся мерой воздействия на данное тело со стороны других тел или полей. Приложение силы обусловливает изменение скорости тела или появление деформаций и механических напряжений.
Деформация может возникать как в самом теле, так и в фиксирующих его объектах — например, пружинах.
Воздействие других тел на тело всегда осуществляется посредством полей, создаваемых телами и воспринимаемых рассматриваемым телом. Различные взаимодействия сводятся к четырём фундаментальным; согласно Стандартной модели физики элементарных частиц, эти фундаментальные взаимодействия (слабое, электромагнитное, сильное и, возможно, гравитационное) реализуются путём обмена калибровочными бозонами[1].
Для обозначения силы обычно используется символ F — от лат. fortis (сильный).
Общепринятое определение силы отсутствует, в современных учебниках физики сила рассматривается как причина ускорения[2]. Важнейший физический закон, в который входит сила, — второй закон Ньютона. Он гласит, что в инерциальных системах отсчёта ускорение материальной точки по направлению совпадает с равнодействующей силой, то есть суммой сил, приложенных к телу, а по модулю прямо пропорционально модулю равнодействующей и обратно пропорционально массе материальной точки.
Слово «сила» в русском языке является многозначным и нередко используется (само или в сочетаниях, в науке и обиходных ситуациях) в смыслах, отличных от физической трактовки термина.
Общая информация[править | править код]
Об определении силы[править | править код]
Для силы определяющей формулы  , где вместо многоточия стояла бы конструкция из других величин, не существует. Нет также стандартизированного словесного определения — и эта тема является предметом дискуссий с участием крупнейших учёных со времён Ньютона[3]. Попытка введения силы как произведения массы на ускорение
, где вместо многоточия стояла бы конструкция из других величин, не существует. Нет также стандартизированного словесного определения — и эта тема является предметом дискуссий с участием крупнейших учёных со времён Ньютона[3]. Попытка введения силы как произведения массы на ускорение  или коэффициента упругости на деформацию
или коэффициента упругости на деформацию  (
( — орт) выродила бы второй закон Ньютона или закон Гука в тавтологию.
— орт) выродила бы второй закон Ньютона или закон Гука в тавтологию.
Отсутствие теоретического (семантического) определения силы может быть восполнено изложением способа её измерения, в сочетании с описанием свойств обсуждаемой величины. В терминах логики этим формулируется так называемое операциональное определение[4].
Характеристики силы[править | править код]
Сила является векторной величиной. Она характеризуется модулем, направлением и точкой приложения. Также используют понятие линия действия силы, означающее проходящую через точку приложения силы прямую, вдоль которой направлена сила.
Зависимость силы от расстояния между телами может иметь различный вид, однако, как правило, при больших расстояниях сила стремится к нулю — поэтому отдалением рассматриваемого тела от других тел с хорошей точностью обеспечивается ситуация «отсутствия внешних сил»[5]. Исключения возможны в некоторых задачах космологии, касающихся тёмной энергии[6].
Кроме разделения по типу фундаментальных взаимодействий, существуют иные классификации сил, в том числе: внешние—внутренние (то есть действующие на материальные точки (тела) данной механической системы со стороны материальных точек (тел) не принадлежащих этой системе и силы взаимодействия между материальными точками (телами) данной системы[7]), потенциальные и нет (потенциально ли поле изучаемых сил), упругие—диссипативные, сосредоточенные—распределённые (приложены в одной или многих точках), постоянные или переменные во времени.
При переходе из одной инерциальной системы отсчёта в другую преобразование сил осуществляется так же, как и полей соответствующей природы (например, электромагнитных, если сила электромагнитная). В классической механике сила является инвариантом преобразований Галилея[8].
Системой сил называется совокупность сил, действующих на рассматриваемое тело или на точки механической системы. Две системы сил называют эквивалентными, если их действие по отдельности на одно и то же твердое тело или материальную точку одинаково при прочих равных условиях[7].
Уравновешенной системой сил (или системой сил, эквивалентной нулю) называется система сил, действие которой на твердое тело или материальную точку не приводит к изменению их кинематического состояния[7].
Размерность силы[править | править код]
Размерность силы в Международной системе величин (англ. International System of Quantities, ISQ), на которой базируется Международная система единиц (СИ), и в системе величин LMT, используемой в качестве основы для системы единиц СГС, — LMT−2. Единицей измерения в СИ является ньютон (русское обозначение: Н; международное: N), в системе СГС — дина (русское обозначение: дин, международное: dyn).
Примеры величин сил[править | править код]
Основной источник: [9]
| Пример | Сила (Н) |
|---|---|
| Сила притяжения между Солнцем и Землёй |  [10] [10]
|
| Сила притяжения между Землёй и Луной |  [10] [10]
|
| Сила тяги двигателей первой и второй ступеней ракеты-носителя «Союз» |  [11] [11]
|
| Сила тяги тепловоза 2ТЭ70 |  [12] [12]
|
| Сила притяжения между электроном и протоном в атоме водорода |  [10] [10]
|
| Сила звукового давления в ухе человека у порога слышимости |  [10] [10]
|
Равнодействующая системы сил[править | править код]
Если к незакреплённому телу приложено несколько сил, то каждая из них сообщает телу такое ускорение, какое она сообщила бы в отсутствие действия других сил. Это утверждение, основанное на опытных фактах, носит название принципа независимости действия сил (принципа суперпозиции). Поэтому при расчёте ускорения тела все действующие на него силы заменяют одной силой, называемой равнодействующей, а именно векторной суммой всех действующих сил. В частном случае равенства равнодействующей сил нулю ускорение тела также будет нулевым.
Измерение сил[править | править код]
Для измерения сил используются два метода: статический и динамический[13].
Исторический аспект понятия силы[править | править код]
В древнем мире[править | править код]
Человечество вначале стало воспринимать понятие силы через непосредственный опыт передвижения тяжёлых предметов. «Сила», «мощность», «работа» при этом были синонимами (как и в современном языке за пределами естествознания). Перенос личных ощущений на объекты природы привёл к антропоморфизму: все предметы, которые могут воздействовать на другие (реки, камни, деревья) должны быть живыми, в живых существах должна содержаться та же сила, которую человек чувствовал в себе.
С развитием человечества сила была обожествлена, причём как египетский, так и месопотамский боги силы символизировали не только жестокость и мощь, но и наведение порядка во вселенной[14]. Всемогущий Бог Библии также несёт в своих именах и эпитетах ассоциации с силой[15].
В античности[править | править код]
Когда греческие учёные стали задумываться о природе движения, понятие силы возникло как часть учения Гераклита о статике как балансе противоположностей[16]. Эмпедокл и Анаксагор пытались объяснить причину движения и пришли к понятиям, близким к понятию силы[16]. У Анаксагора «ум» движет внешней по отношению к нему материей[17]. У Эмпедокла движение вызывается борьбой двух начал, «любви» (филии) и «вражды» (фобии)[17], которые Платон рассматривал как притяжение и отталкивание[18]. При этом взаимодействие, по Платону, объяснялось в терминах четырёх элементов (огня, воды, земли и воздуха): близкие вещи притягиваются, земля к земле, вода к воде, огонь к огню[19]. В древнегреческой науке каждый элемент также имел своё место в природе, которое старался занять. Таким образом, сила тяжести, например, объяснялась двумя способами: притяжением подобных вещей и стремлением элементов занять своё место[20]. В отличие от Платона, Аристотель последовательно занимал вторую позицию, что отложило концепцию общей силы тяготения, которая бы объясняла движение земных и небесных тел, до времён Ньютона[20].
Для обозначения понятия силы Платон использовал термин «динамис» («возможность» движения). Термин употреблялся в расширенном смысле, близком к современному понятию мощности: химические реакции, тепло и свет все также представляли собой динамисы[21].
Аристотель рассматривал две разные силы: присущую самому телу («природу», физис) и силу, с которой одно тело тянет или толкает другое (при этом тела должны быть в контакте)[22]. Именно это понятие о силе и легло в основу аристотелевой механики, хотя дуализм и препятствовал количественному определению силы взаимодействия двух тел (так как вес был природной силой, не связанной с взаимодействием, и потому не мог использоваться в качестве стандарта)[23]. В случае природного движения (падения тяжёлого или подъёма лёгкого тела) Аристотель предложил формулу для скорости в виде отношения плотностей движущегося тела A и среды, сквозь которую происходит движение, B: v=A/B[24] (очевидная проблема для случая равных плотностей была отмечена уже в VI веке[25]).
Изучением сил в процессе конструирования простых механизмов занимался в III в. до н. э. Архимед[26]. Архимед рассматривал силы в статике и чисто геометрически, и потому его вклад в развитие понятия силы незначителен[27].
Вклад в развитие понятие силы внесли стоики. Согласно их учению, силы неразрывно связывали два тела через дальнодействующую «симпатию» или (у Посидония) через всеобщее напряжение, пронизывающее всё пространство. Стоики пришли к этим выводам путём наблюдения за приливами, где взаимодействие Луны, Солнца и воды в океане было трудно объяснить с позиции Аристотелева близкодействия (сам Аристотель считал, что Солнце, садясь в океан, вызывает ветры, приводящие к приливам)[28].
В доклассической механике[править | править код]
Бэкон и Оккам вернули в науку идею о дальнодействии.
Бэкон называл дальнодействующие силы species (обычно этот специфичный для Бэкона термин не переводится) и рассматривал их распространение в среде как цепочку близких взаимодействий. Такие силы, по Бэкону, имели вполне телесный характер, ближайшим эквивалентом в современной физике является волна[29].
Оккам первым отказался от аристотелевского описания взаимодействия как непосредственного контакта и декларировал возможность движителя воздействовать на движимое на расстоянии, приведя в качестве одного из примеров магниты[30].
Ревизии подвергалась и аристотелевская формула v=A/B. Уже в VI веке Иоанн Филопон рассматривал в качестве правой части разность A-B, что кроме проблемной ситуации с одинаковыми плотностями позволило также описать движение в вакууме[31]. В XIV веке Брадвардин предложил формулу v=log(A/B)[32].
У Кеплера[править | править код]
Взгляды Кеплера на силу претерпели быстрое изменение. Ещё в 1600 году Кеплер рассматривает силы как свойство, подобное душе, которое руководит движением небесных тел. Однако уже к 1605 году Кеплер пришёл к выводу, что притяжение — это не действие, а реакция, силы притяжения относятся к материальному миру и подлежат математическому изучению. В 1607 году Кеплер пришёл к выводу, что приливы вызываются воздействием силы притяжения Луны на океаны[33]. По мнению М. Дженнера, Кеплер пришёл к идее единой теории тяготения, охватывающей как падение тел, так и движение Луны, до Ньютона[34].
В классической механике[править | править код]
С зарождением классической механики Бекманом и Декартом был сформулирован закон сохранения количества движения. После осознания этого факта, который похоронил аристотелевскую связь силы и скорости, у исследователей оставалось два выхода: определить силу как причину изменения скорости или отбросить понятие силы как таковое. Сам Декарт вначале применял понятие силы, чтобы объяснить ускоренное падение тела на землю, но со временем в попытке геометризации физики пришёл к выводу, что понятие силы является искусственным, и в 1629 году описывал процесс свободного падения без упоминания «силы»[35]. С другой стороны, Галилей недвусмысленно рассматривал силу как причину увеличения скорости свободного падения[36].
У Ньютона[править | править код]
В трудах Ньютона понятие силы было тесно связано с тяготением, поскольку интерпретация кеплеровских результатов в области движения планет в то время занимала все умы[37]. Впервые понятие силы (лат. vis) встречается у Ньютона в «Началах» в двух контекстах: «присущей силы» (лат. vis insita), ньютоновской силы инерции и «приложенной силы» (лат. vis impressa), отвечающей за изменение движения тела. Ньютон также отдельно выделял центростремительную силу (к которой относил тяготение) с несколькими разновидностями: абсолютную силу (подобную современному полю тяготения), ускоряющую силу (эффект тяготения на единицу массы, современное ускорение) и движущую (произведение массы на ускорение)[38]. Ньютон не даёт общего определения силы. Как отмечает М. Дженнер, второй закон Ньютона не является определением силы у самого автора закона (который явно различал определения и законы), сила у Ньютона является пресуществующим понятием, интуитивно эквивалентным силе мускулов[39].
Современность[править | править код]
Конец XX века охарактеризовался спорами о том, необходимо ли в науке понятие силы и существуют ли силы в принципе — или это только термин, введённый для удобства[40].
Бигелоу с соавторами в 1988 году аргументировали, что силы по сути определяют причинно-следственные отношения и потому не могут быть отброшены[41]. М. Джеммер на это возразил, что в Стандартной модели и других физических теориях сила трактуется лишь как обмен моментом импульса, понятие силы потому сводится к более простому «взаимодействию» между частицами. Это взаимодействие описывается в терминах обмена дополнительными частицами (фотонами, глюонами, бозонами и, возможно, гравитонами)[40]. Джеммер приводит следующее упрощённое пояснение: два конькобежца скользят по льду плечо к плечу, у обоих в руках находится по мячу. Быстрый и одновременный обмен мячами приведёт к отталкивающему взаимодействию[42].
Стиннер отмечает, что эйнштейновский принцип эквивалентности сил гравитации и инерции по сути уничтожает понятие силы, в общей теории относительности внешние силы (F из уравнения F=ma) отсутствуют[43].
Ньютоновская механика[править | править код]
Ньютон задался целью описать движение объектов, используя понятия инерции и силы. Сделав это, он попутно установил, что всякое механическое движение подчиняется общим законам сохранения. В 1687 г. Ньютон опубликовал свой знаменитый труд «Математические начала натуральной философии», в котором изложил три основополагающих закона классической механики (законы Ньютона)[44][45].
Первый закон Ньютона[править | править код]
Первый закон Ньютона утверждает, что существуют системы отсчёта, в которых тела сохраняют состояние покоя или равномерного прямолинейного движения при отсутствии действий на них со стороны других тел или при взаимной компенсации этих воздействий[45]. Такие системы отсчёта называются инерциальными. Ньютон предположил, что каждый массивный (подразумевается: «обладающий массой», а не «громоздкий») объект имеет определённый запас инерции, характеризующий «естественное состояние» движения этого объекта. Эта идея отрицает взгляд Аристотеля, который рассматривал только покой «естественным состоянием» объекта. Первый закон Ньютона противоречит аристотелевской физике, одним из положений которой является утверждение о том, что тело может двигаться с постоянной скоростью лишь под действием силы. Тот факт, что в механике Ньютона в инерциальных системах отсчёта покой неотличим от равномерного прямолинейного движения, является обоснованием принципа относительности Галилея. Среди совокупности тел принципиально невозможно определить, какие из них находятся «в движении», а какие «покоятся». Говорить о движении можно лишь относительно конкретной системы отсчёта. Законы механики выполняются одинаково во всех инерциальных системах, другими словами, все они механически эквивалентны. Последнее следует из так называемых преобразований Галилея[46].
Второй закон Ньютона[править | править код]
Второй закон Ньютона имеет вид:

где  — масса материальной точки,
— масса материальной точки,  − её ускорение,
− её ускорение,  — равнодействующая приложенных сил.
— равнодействующая приложенных сил.
Считается, что это «вторая самая известная формула в физике» («первой» значится формула эквивалентности массы и энергии), хотя сам Ньютон никогда явным образом не записывал свой второй закон в этом виде. Впервые данную форму закона можно встретить в трудах К. Маклорена и Л. Эйлера.
Третий закон Ньютона[править | править код]
Для любых двух тел (назовём их тело 1 и тело 2) третий закон Ньютона утверждает, что сила действия тела 1 на тело 2 сопровождается появлением равной по модулю, но противоположной по направлению силы, действующей на тело 1 со стороны тела 2[47]. Математически закон записывается так:

Этот закон означает, что силы всегда возникают парами «действие-противодействие»[45].
Фундаментальные взаимодействия[править | править код]
Все силы в природе основаны на четырёх типах фундаментальных взаимодействий. Максимальная скорость распространения всех видов взаимодействия равна скорости света в вакууме. Электромагнитные силы действуют между электрически заряженными телами, гравитационные — между массивными объектами. Сильное и слабое проявляются только на очень малых расстояниях, они ответственны за возникновение взаимодействия между субатомными частицами, включая нуклоны, из которых состоят атомные ядра.
Интенсивность сильного и слабого взаимодействия измеряется в единицах энергии (электрон-вольтах), а не единицах силы, и потому применение к ним термина «сила» объясняется существующей с античности традицией объяснять любые явления в окружаемом мире действием специфических для каждого явления «сил».
Понятие силы не может быть применено по отношению к явлениям субатомного мира. Это понятие из арсенала классической физики, ассоциирующейся (пусть даже только подсознательно) с ньютоновскими представлениями о силах, действующих на расстоянии. В субатомной физике таких сил уже нет: их заменяют взаимодействия между частицами, происходящие через посредство полей, то есть каких-то других частиц. Поэтому физики высоких энергий избегают употреблять слово сила, заменяя его словом взаимодействие[48].
Взаимодействие каждого типа обусловлено обменом соответствующими «переносчиками»: электромагнитное — виртуальными фотонами, слабое — векторными бозонами, сильное — глюонами (а на больших расстояниях — мезонами). В отношении гравитационного взаимодействия имеются теоретические предположения (например, в теории струн или М-теории), что с ним также может быть связан свой переносчик-бозон, называемый гравитоном, но его существование пока не доказано. Эксперименты по физике высоких энергий, проведённые в 70−80-х годах XX в., подтвердили идею о том, что слабое и электромагнитное взаимодействия являются проявлениями более глобального электрослабого взаимодействия[49]. В настоящее время делаются попытки объединения всех четырёх фундаментальных взаимодействий в одно (так называемая теория великого объединения).
Гравитация[править | править код]
Гравитация (сила тяготения) — универсальное взаимодействие между любыми видами материи. В рамках классической механики описывается законом всемирного тяготения, сформулированным Ньютоном в уже упомянутом труде «Математические начала натуральной философии». Ньютон получил величину ускорения, с которым Луна движется вокруг Земли, положив при расчёте, что сила тяготения убывает обратно пропорционально квадрату расстояния от тяготеющего тела. Кроме этого, им же было установлено, что ускорение, обусловленное притяжением одного тела другим, пропорционально произведению масс этих тел[50]. На основании этих двух выводов был сформулирован закон тяготения: любые материальные частицы притягиваются по направлению друг к другу с силой  , прямо пропорциональной произведению масс (
, прямо пропорциональной произведению масс ( и
и  ) и обратно пропорциональной квадрату расстояния
) и обратно пропорциональной квадрату расстояния  между ними:
между ними:

Здесь  − гравитационная постоянная[51], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчёта силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в её основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, чёрных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[52].
− гравитационная постоянная[51], значение которой впервые получил в своих опытах Генри Кавендиш. Используя данный закон, можно получить формулы для расчёта силы тяготения тел произвольной формы. Теория тяготения Ньютона хорошо описывает движение планет Солнечной системы и многих других небесных тел. Однако, в её основе лежит концепция дальнодействия, противоречащая теории относительности. Поэтому классическая теория тяготения неприменима для описания движения тел, перемещающихся со скоростью, близкой к скорости света, гравитационных полей чрезвычайно массивных объектов (например, чёрных дыр), а также переменных полей тяготения, создаваемых движущимися телами, на больших расстояниях от них[52].
Более общей теорией гравитации является общая теория относительности Альберта Эйнштейна. В ней гравитация не характеризуется инвариантной силой, не зависящей от системы отсчёта. Вместо этого свободное движение тел в гравитационном поле, воспринимаемое наблюдателем как движение по искривлённым траекториям в трёхмерном пространстве-времени с переменной скоростью, рассматривается как движение по инерции по геодезической линии в искривлённом четырёхмерном пространстве-времени, в котором время в разных точках течёт по-разному. Причем эта линия в некотором смысле «наиболее прямая» — она такова, что пространственно-временной промежуток (собственное время) между двумя пространственно-временными положениями данного тела максимален. Искривление пространства зависит от массы тел, а также от всех видов энергии, присутствующих в системе[1].
Электромагнитное взаимодействие[править | править код]
- Электростатическое поле (поле неподвижных зарядов)
Развитие физики после Ньютона добавило к трём основным (длина, масса, время) величинам электрический заряд с размерностью «кулон» (C). Однако, исходя из требований практики, в качестве основной единицы измерения стали использовать не единицу заряда, а единицу силы электрического тока. Так, в системе СИ основной единицей является ампер, а единица заряда — кулон — производная от него.
Поскольку заряд как таковой не существует независимо от несущего его тела, электрическое взаимодействие тел проявляется в виде рассматриваемой в механике силы, служащей причиной ускорения. Применительно к электростатическому взаимодействию двух точечных зарядов с величинами  и
и  , располагающихся в вакууме, используется закон Кулона. В форме, соответствующей системе СИ, он имеет вид:
, располагающихся в вакууме, используется закон Кулона. В форме, соответствующей системе СИ, он имеет вид:

где  — сила, с которой заряд 1 действует на заряд 2,
— сила, с которой заряд 1 действует на заряд 2,  — вектор, направленный от заряда 1 к заряду 2 и по модулю равный расстоянию между зарядами, а
— вектор, направленный от заряда 1 к заряду 2 и по модулю равный расстоянию между зарядами, а  — электрическая постоянная, равная ≈ 8,854187817•10−12 Ф/м. При помещении зарядов в однородную и изотропную среду сила взаимодействия уменьшается в ε раз, где ε — диэлектрическая проницаемость среды.
— электрическая постоянная, равная ≈ 8,854187817•10−12 Ф/м. При помещении зарядов в однородную и изотропную среду сила взаимодействия уменьшается в ε раз, где ε — диэлектрическая проницаемость среды.
Сила направлена вдоль линии, соединяющей точечные заряды. Графически электростатическое поле принято изображать в виде картины силовых линий, представляющих собой воображаемые траектории, по которым перемещалась бы лишённая массы заряженная частица. Эти линии начинаются на одном и заканчиваются на другом заряде.
- Магнитостатическое поле (поле постоянных токов)
Существование магнитного поля признавалось ещё в средние века китайцами, использовавшими «любящий камень» — магнит в качестве прообраза магнитного компаса. Графически магнитное поле принято изображать в виде замкнутых силовых линий, густота которых (так же, как и в случае электростатического поля) определяет его интенсивность. Исторически наглядным способом визуализации магнитного поля были железные опилки, насыпаемые, например, на лист бумаги, положенный на магнит.
Эрстед установил, что текущий по проводнику ток вызывает отклонение магнитной стрелки.
Фарадей пришёл к выводу, что вокруг проводника с током создаётся магнитное поле.
Ампер высказал гипотезу, признанную в физике в качестве модели процесса возникновения магнитного поля, которая предполагает существование в материалах микроскопических замкнутых токов, обеспечивающих совместно эффект естественного или наведённого магнетизма.
Ещё, Ампером было установлено, что в находящейся в вакууме системе отсчёта, по отношению к которой заряд находится в движении, то есть ведёт себя как электрический ток, возникает магнитное поле, интенсивность которого определяется вектором магнитной индукции  , лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
, лежащим в плоскости, расположенной перпендикулярно по отношению к направлению движения заряда.
Тот же Ампер впервые измерил силу взаимодействия двух параллельных проводников с текущими по ним токами. Один из проводников создавал вокруг себя магнитное поле, второй реагировал на это поле сближением или удалением с поддающейся измерению силой, зная которую и величину силы тока можно было определить модуль вектора магнитной индукции.
Силовое взаимодействие между электрическими зарядами, не находящимися в движении относительно друг друга, описывается законом Кулона. Однако заряды, находящиеся в таком движении, порождают и магнитные поля, посредством которых созданные движением зарядов токи в общем случае приходят в состояние силового взаимодействия.
Принципиальным отличием силы, возникающей при относительном движении зарядов, от случая их стационарного размещения, является различие в геометрии этих сил. Для случая электростатики сила взаимодействия двух зарядов направлена по линии, их соединяющей. Поэтому геометрия задачи двумерна и рассмотрение ведётся в плоскости, проходящей через эту линию.
В случае токов сила, характеризующая магнитное поле, создаваемое током, расположена в плоскости, перпендикулярной току. Поэтому картина явления становится трёхмерной. Магнитное поле, создаваемое бесконечно малым по длине элементом первого тока, взаимодействуя с таким же элементом второго тока, в общем случае создаёт силу, действующую на него. При этом для обоих токов эта картина полностью симметрична в том смысле, что нумерация токов произвольна.
Закон взаимодействия токов используется для эталонирования постоянного электрического тока.
Сильное взаимодействие[править | править код]
Сильное взаимодействие — фундаментальное короткодействующее взаимодействие между адронами и кварками.
В атомном ядре сильное взаимодействие удерживает вместе положительно заряженные (испытывающие электростатическое отталкивание) протоны, происходит это посредством обмена пи-мезонами между нуклонами (протонами и нейтронами). Пи-мезоны живут очень мало, времени жизни им хватает лишь на то, чтобы обеспечить ядерные силы в радиусе ядра, потому ядерные силы называют короткодействующими. Увеличение количества нейтронов «разбавляет» ядро, уменьшая электростатические силы и увеличивая ядерные, но при большом количестве нейтронов они сами, будучи фермионами, начинают испытывать отталкивание вследствие принципа Паули. Также при слишком сильном сближении нуклонов начинается обмен W-бозонами, вызывающий отталкивание, благодаря этому атомные ядра не «схлопываются».
Внутри самих адронов сильное взаимодействие удерживает вместе кварки — составные части адронов. Квантами сильного поля являются глюоны. Каждый кварк имеет один из трёх «цветовых» зарядов, каждый глюон состоит из пары «цвет»-«антицвет». Глюоны связывают кварки в так называемый «конфайнмент», из-за которого на данный момент свободные кварки в эксперименте не наблюдались. При отдалении кварков друг от друга энергия глюонных связей возрастает, а не уменьшается как при ядерном взаимодействии. Затратив много энергии (столкнув адроны в ускорителе), можно разорвать кварк-глюонную связь, но при этом происходит выброс струи новых адронов. Впрочем, свободные кварки могут существовать в космосе: если какому-то кварку удалось избежать конфайнмента во время Большого взрыва, то вероятность аннигилировать с соответствующим антикварком или превратиться в бесцветный адрон для такого кварка исчезающе мала.
Слабое взаимодействие[править | править код]
Слабое взаимодействие — фундаментальное короткодействующее взаимодействие. Радиус действия 10−18 м. Симметрично относительно комбинации пространственной инверсии и зарядового сопряжения. В слабом взаимодействии участвуют все фундаментальные фермионы (лептоны и кварки). Это единственное взаимодействие, в котором участвуют нейтрино (не считая гравитации, пренебрежимо малой в лабораторных условиях), чем объясняется колоссальная проникающая способность этих частиц. Слабое взаимодействие позволяет лептонам, кваркам и их античастицам обмениваться энергией, массой, электрическим зарядом и квантовыми числами — то есть превращаться друг в друга. Одно из проявлений — бета-распад.
Производные виды сил[править | править код]
Всё многообразие проявляющих себя в природе сил в принципе может быть сведено к четырём фундаментальным, представленным в предыдущем разделе.
Например, трение — это проявление электромагнитных сил, действующих между атомами двух соприкасающихся поверхностей, и принципа запрета Паули[53], который не позволяет атомам проникать в область друг друга. Сила, возникающая при деформации пружины, описываемая законом Гука, также является результатом действия электромагнитных сил между частицами и принципа запрета Паули, заставляющих атомы кристаллической решётки вещества удерживаться около положения равновесия[1]. Сила тяжести — это результат действия фундаментального гравитационного притяжения на планете.
Однако на практике подобная детализация природы разных сил часто оказывается нецелесообразной или невозможной. Поэтому силы, «производные» по отношению к фундаментальным, обычно рассматриваются как самостоятельные характеристики взаимодействия тел и имеют свои наименования: «сила натяжения», «сила Ван-дер-Ваальса» и другие (см. список названий сил в физике).
Сила инерции[править | править код]
Сила инерции — сила, вводимая в неинерциальных системах отсчёта. Введение сил инерции производится для того, чтобы придать уравнениям движения тел в неинерциальных системах отсчёта ту же форму, какую имеет уравнение второго закона Ньютона в инерциальных системах. В ряде случаев такой подход позволяет сделать рассмотрение движения более удобным и наглядным, а решение соответствующих задач — более простым.
В частности, в системе отсчёта, связанной с равноускоренно движущимся телом, сила инерции направлена противоположно ускорению. Из полной силы инерции, представляющей собой сумму переносной и кориолисовой, могут быть для удобства выделены центробежная сила и сила Кориолиса.
Силы инерции принципиально отличаются от всех остальных сил тем, что никакому реальному взаимодействию тел они не соответствуют. При этом, ввиду равенства инерционной и гравитационной масс, согласно Принципу эквивалентности сил гравитации и инерции локально невозможно отличить, какая сила действует на данное тело — гравитационная или же сила инерции[источник не указан 3628 дней].
Применение термина «сила инерции» в элементарной физике не рекомендуется[источник не указан 947 дней], так как, по умолчанию, все уравнения движения в элементарной физике описывают движение относительно инерциальных систем отчёта и понятие «сила» всегда связано с воздействием какого-то внешнего объекта и не может существовать само по себе. Указание на диаграмме сил, действующих на тело, силы инерции оценивается в курсах элементарной физики как ошибка.
См. также[править | править код]
- Энергия
- Поле (физика)
- Вес
- Нерешённые проблемы современной физики
Примечания[править | править код]
- ↑ 1 2 3 Feynman, R. P., Leighton, R. B., Sands, M. Lectures on Physics, Vol 1 (неопр.). — Addison-Wesley, 1963. (англ.)
- ↑ Коэльо, 2010, с. 91.
- ↑ Коэльо, 2010.
- ↑ А. А. Ивин, А. Л. Никифоров, Словарь по логике (см. «определение операциональное»). — М.: Туманит, изд. центр ВЛАДОС (1997).
- ↑ И. Бутиков, А. С. Кондратьев. § 15. Инерция. Первый закон Ньютона // Физика для углублённого изучения 1. Механика. — С. 85, 87.
- ↑ Rupert W. Anderson. The Cosmic Compendium: The Big Bang & the Early Universe. — Lulu.com, 2015-03-28. — С. 86. — 244 с. — ISBN 9781329024182.
- ↑ 1 2 3 Тарасов В. Н., Бояркина И. В., Коваленко М. В., Федорченко Н. П., Фисенко Н. И. Теоретическая механика. — М., ТрансЛит, 2012. — C. 24-25
- ↑ В. И. Григорьев. Галилея принцип относительности. БСЭ, 3-е изд. (1969—1978). — «…силы… являются в классической механике инвариантами, т.е. величинами, не изменяющимися при переходе от одной системы отсчёта к другой». Дата обращения: 17 марта 2023.
- ↑ Кабардин О.Ф., Орлов В.А., Пономарёва А.В. Факультативный курс физики. 8 класс. — М.: Просвещение, 1985. — Тираж 143 500 экз. — С. 208
- ↑ 1 2 3 4 Кабардин О. Ф., Орлов В. А., Пономарёва А. В. Факультативный курс физики. 8 класс. — М.: Просвещение, 1985. — 3-е изд., перераб. — 208 c. — Тираж 143500 экз.
- ↑ Данные взяты из статьи Википедии Союз (ракета-носитель)
- ↑ Данные взяты из статьи Википедии ТЭП70
- ↑ Тарг С. М. Сила // Физическая энциклопедия : [в 5 т.] / Гл. ред. А. М. Прохоров. — М.: Большая российская энциклопедия, 1994. — Т. 4: Пойнтинга — Робертсона — Стримеры. — С. 494. — 704 с. — 40 000 экз. — ISBN 5-85270-087-8.
- ↑ Джеммер, 1999, с. 18—20.
- ↑ Джеммер, 1999, с. 21.
- ↑ 1 2 Джеммер, 1999, с. 25.
- ↑ 1 2 Джеммер, 1999, с. 26.
- ↑ Джеммер, 1999, с. 27.
- ↑ Джеммер, 1999, с. 31.
- ↑ 1 2 Джеммер, 1999, с. 32.
- ↑ Джеммер, 1999, с. 34—35.
- ↑ Джеммер, 1999, с. 36.
- ↑ Джеммер, 1999, с. 35—39.
- ↑ Джеммер, 1999, с. 39.
- ↑ Джеммер, 1999, с. 66.
- ↑ Heath,T.L. The Works of Archimedes (1897). Archive.org. Дата обращения: 14 октября 2007. Архивировано 23 августа 2011 года. (англ.)
- ↑ Джеммер, 1999, с. 41.
- ↑ Джеммер, 1999, с. 41—42.
- ↑ Джеммер, 1999, с. 60.
- ↑ Джеммер, 1999, с. 64.
- ↑ Стиннер, 1994, с. 79.
- ↑ Джеммер, 1999, с. 66—67.
- ↑ Джеммер, 1999, с. 81—83.
- ↑ Джеммер, 1999, с. 84.
- ↑ Джеммер, 1999, с. 103—104.
- ↑ Джеммер, 1999, с. 101.
- ↑ Джеммер, 1999, с. 116—117.
- ↑ Джеммер, 1999, с. 119—120.
- ↑ Джеммер, 1999, с. 124.
- ↑ 1 2 Джеммер, 1999, с. v.
- ↑ John Bigelow , Brian Ellis, and Robert Pargetter. Forces // Philosophy of Science 55, no. 4 (Dec., 1988): 614—630. doi:10.1086/289464 (англ.)
- ↑ Джеммер, 1999, с. v-vi.
- ↑ Стиннер, 1994, с. 83—84.
- ↑ University Physics, Sears, Young & Zemansky, pp. 18-38 (англ.)
- ↑ 1 2 3 Newton, I. The Principia Mathematical Principles of Natural Philosophy. — University of California Press, 1999. — ISBN 0-520-08817-4. (англ.)
- ↑ Мултановский В. В. Курс теоретической физики. Классическая механика. Основы специальной теории относительности. Релятивистская механика. — М.: Просвещение, 1988. — С. 80−81.
- ↑ Henderson, Tom Lesson 4: Newton’s Third Law of Motion (недоступная ссылка — история). The Physics Classroom (1996-2007). Дата обращения: 4 января 2008. Архивировано 23 августа 2011 года. (англ.)
- ↑ Капра, Фритьоф ДАО ФИЗИКИ. СПб.,”ОРИС”*”ЯНА-ПРИНТ”. 1994 г. 304 с. ISBN 5-88436-021-5
- ↑ Weinberg, S. Dreams of a Final Theory. — Vintage Books USA, 1994. — ISBN 0-679-74408-8. (англ.)
- ↑ University Physics, Sears, Young & Zemansky, pp. 59−82 (англ.)
- ↑ Sir Isaac Newton: The Universal Law of Gravitation. Astronomy 161 The Solar System. Дата обращения: 4 января 2008. Архивировано 23 августа 2011 года. (англ.)
- ↑ «Тяготение». Новиков И. Д. // Физическая энциклопедия. Гл. ред. Прохоров А. М. — М.: «Большая Российская энциклопедия», 1998. — Т. 5. — С. 188−193. — 760 с. — ISBN 5-85270-101-7.
- ↑ Nave, R Pauli Exclusion Principle. HyperPhysics***** Quantum Physics. Дата обращения: 2 января 2008. Архивировано 23 августа 2011 года. (англ.)
Литература[править | править код]
- Григорьев В. И., Мякишев Г. Я. — «Силы в природе»
- Ландау Л. Д., Лифшиц Е. М. Механика. — Издание 5-е, стереотипное. — М.: Физматлит, 2004. — 224 с. — («Теоретическая физика», том I). — ISBN 5-9221-0055-6.
- Guide to the Measurement of Force — prepared by The Institute of Measurement and Control, London (published 1998, re-issued 2013) — ISBN 0 904457 28 1
- Джеммер, Макс. Concepts of Force. — Mineola, NY: Dover Publications Inc., 1999. — ISBN 0-486-40689-X. (англ.)
- Stinner, Arthur. The story of force: from Aristotle to Einstein (англ.) // Physics education. — 1994. — Vol. 29, no. 2. — P. 77—85.
- Ricardo Lopes Coelho. On the Concept of Force: How Understanding its History can Improve Physics Teaching (англ.) // Sci & Educ. — 2010. — Vol. 19. — P. 91—113. — doi:10.1007/s11191-008-9183-1.
Основываясь на законах Ньютона, динамика работает с такими величинами:
- механическая сила (F) – это мера механического воздействия на тело со стороны другого тела или поля;
- механическое воздействие – воздействие, которое приводит к изменению скорости тела и его деформации.
Сила
Сила характеризуется модулем, направлением и точкой приложения.
Измеряется в ньютонах (Н). Записывается так: F=1Н.
1 ньютон – это сила, которая способна придать телу с массой 1 килограмм ускорение 1 м/с за 1 секунду.
То есть 1 Н=1кг·мс2.
Масса в динамике понимается как два различных свойства вещества.
Гравитационная масса. Импульс
Инертная масса – это мера инертности тела.
При увеличении массы тела усложняется измерение его скорости.
Гравитационная масса способна определить значение силы взаимодействия тела с внешними гравитационными полями (пассивная гравитационная масса), и какое гравитационное поле создает само это тело (активная гравитационная масса).
Экспериментально было установлено, что эти массы пропорциональны относительно друг друга. Отклонений от закона не обнаружено. Значение коэффициента пропорциональности зачастую выбирают 1 и говорят о равенстве инертной и гравитационной масс. Оно входит в состав содержания слабого принципа эквивалентности – составной части эйнштейновского принципа эквивалентности, являющегося одним из основных положений теории относительности.
Измерение массы тела производится в килограммах: m=1 кг.
Определение массы однородного тела при наличии плотности записывается: m=ρV, где ρ – значение плотности тела, V – объем данного тела.
Масса характеризуется свойствами:
- положительность;
- аддитивность – масса системы тел равняется сумме масс каждого из них, входящих в имеющуюся систему;
- инвариантность – отсутствие зависимости массы от характера и скорости движения тел.
Импульсом (количеством движения) называют векторную физическую величину, являющуюся мерой механического движения тела.
Классическая механика определяет импульс тела как произведение его массы m на скорость υ→, а его направление совпадает с направлением вектора скорости p→=mυ→.
Импульс характеризуется основными свойствами:
- Аддитивность. Импульс механической системы из материальных точек равняется сумме импульсов всех этих точек, входящих в нее.
- Инвариантность относительно поворота системы отсчета.
- Сохранение. При взаимодействиях не происходит изменение импульса, а только его механических характеристик системы.
Задачи динамики
При исследовании движения тела динамика рассматривает его в качестве материальной точки или как систему материальных точек с наложенными на них связями.
Цель исследования движения свободной материальной точки является решением одной из двойственных задач:
- при известной действующей силе на точку определение закона ее движения (прямая или основная задача);
- при известном законе движения точки определение равнодействующей действующей на нее силы (обратная задача).
Если существует несвободная материальная точка, то есть без наложений связей, то при вынужденном ее движении по заданной поверхности или кривой динамика решает задачу определения реакций этой связи, основываясь на законе движения точки и действующих на нее активных сил.
Когда движение несвободное, тогда задача распадается на две. При известных действующих активных силах на точку определяется закон движения точки и реакция наложенной связи.
Решение прямой задачи сведено к интегрированию системы дифференциальных уравнений, описывающих силы, действующих на точки, для нахождения закона ее движения, выражающего зависимость ее координат от времени в заданной системе.
Тогда смысл обратной задачи динамики состоит в решении с помощью дифференцирования по времени заданного закона движения точки.
Физика — одна из самых важных наук на Земле, которая описывает практически все известные человеку процессы и явления. В данной статье мы подробнее остановимся на ее большом разделе, который называется «механикой».
Что изучает механика в физике
Механика — это одна из физических наук, которая изучает движение тел и их взаимодействие друг с другом во время движения. Этот раздел физики описывает движение как искусственно созданных летательных аппаратов, так и физических небесных объектов; атмосферные и подводные течения; движение жидкостей и газов в природе; перемещение среды в электромагнитных полях; движение крови по сосудам и т.д.
Движение в механике — это изменение во времени и пространстве положения тел (или их частей) относительно друг друга.
Науку механику в зависимости от свойств пространства, времени и материи, на которых основывается каждая механическая теория, подразделяют на следующие виды:
- классическую (раздел физической науки, основанный на открытиях Ньютона и Галилея);
- релятивистскую (раздел физической науки, который описывает процессы механического движения, происходящие при скоростях, сопоставимых со скоростью света);
- квантовую (наука о физических явлениях и процессах, действия которых можно сравнить с постоянной Планка).
Основные направления, формулы и пояснения
В механике выделяют следующие основные разделы:
- кинематику (науку, которая описывает количественные характеристики движения: время, расстояние, скорость);
- статику (науку о телах, находящихся в равновесии при воздействии на них внешних сил);
- динамику (науку о движении тел при воздействии на них внешних сил).
Механика изучает движения материальных тел, при этом все материальные объекты делятся на 3 вида:
- Материальная точка (это материальное тело, чьи размеры можно не учитывать).
- Твердое тело (тело, в котором расстояние между любыми его точками неизменно).
- Сплошная среда (газ, жидкость и другие вещества, подверженные деформации).
По предмету изучения механику подразделяют на:
- теоретическую (наука об общих законах движения, которая изучает и описывает движение материальных точек и твердых тел);
- механику сплошных сред (наука, которая изучает движение тел, непрерывно заполняющих пространство и представляющих собой сплошную среду);
- прикладную (наука, которая описывает принцип работы технических механизмов).
Рассмотрим детальнее основные разделы механики. И начнем с кинематики.
Кинематика
Раздел кинематики отвечает на вопросы о том, как именно происходит механическое движение тела.
Механическое движение
Механическое движение — это перемещение тела с течением времени и относительно других объектов в пространстве.
Для расчета этих изменений понадобится система отсчета, которая состоит из:
- объекта, относительно которого будет происходить отсчет движения;
- системы координат, в которой находится объект отсчета;
- часов (для измерения времени).
В системе отсчета метр является единицей длины, а секунда — единицей времени.
Другими важными определениями в кинематике являются:
- Материальная точка — это объект, размеры которого можно не учитывать в расчетах.
- Траектория движения тела (линия, по которой движется объект).
- Путь, пройденный телом (определенный участок траектории, пройденный объектом за определенное время).
Существует 2 вида движения согласно траектории:
- прямое;
- криволинейное.
Поступательное и вращательное движение твердого тела
В кинематике выделяют два вида движения:
- поступательное;
- вращательное.
Поступательное движение — это движение твердого тела, при котором все его точки проходят одну и ту же траекторию и в любой момент времени обладают одинаковыми по направлению и величине векторами скорости и ускорения, синхронно меняющихся для любой точки объекта.
Вращательное движение — это вид механического движения, при котором материальное тело проходит траекторию окружности. При этом все точки тела описывают окружности, которые находятся в параллельных плоскостях. Центры всех окружностей находятся на одной прямой, которая перпендикулярна к плоскостям окружностей (называется осью вращения).
Кинематические уравнения движения
Определение местоположения материальной точки в пространстве можно осуществить двумя способами:
- учитывая зависимость координат от времени;
- учитывая зависимость от времени радиус-вектора.
Эту зависимости можно представить в виде кинематических уравнений движения:
(x=xleft(tright) )
(y=yleft(tright))
(z=zleft(tright))
или
(vec r=vec rleft(tright))
Нулевой вектор на данной иллюстрации — это радиус-вектор положения точки в начальный момент времени.
Кинематические характеристики (скорость, ускорение)
Основными кинематическими характеристиками являются:
- скорость;
- ускорение.
Скорость ((vec v)) — это векторная величина, которая характеризует направление и быстроту движения.
Среднюю скорость можно вычислить по формуле:
(vec v=frac{Deltavec r}{Delta t})
где (Deltavec r ) — перемещение, (Delta t) — время, за которое это перемещение произошло.
Символом (∆) обозначается разность однотипных величин или совсем маленьких интервалов.
Мгновенная скорость может быть вычислена тогда, когда (Delta trightarrow0) и вектор перемещения совпадает с путем перемещения:
(vec v=frac{dvec r}{dt}=frac{dS}{dt})
Ускорение тела (a) является величиной, равной отношению изменения скорости движения тела к длительности промежутка времени, за которое это изменение скорости произошло. Оно рассчитывается по формуле:
(a=frac{Delta V}{Delta t})
Мгновенным ускорение будет являться тогда, когда среднее ускорение за промежуток ∆t → 0, м/с²:
(a=frac{dv}{dt})
Динамика, законы Ньютона
Динамика — это раздел механики, который изучает причины изменения движения тел. Классическая механика видит причины этих изменений в воздействии на объекты различных сил. Расскажем подробно, какими параметрами и характеристиками оперирует раздел динамики.
Динамические характеристики поступательного движения
Основными характеристиками в динамике являются:
- Сила ((vec F)) — это векторная величина, которая характеризует воздействие тел друг на друга, из-за чего с ними происходят определенные изменения: они приобретают ускорение или подлежат деформации. Сила, как любой вектор, имеет модуль, направление и точку приложения.
- Масса ((m)) — это физическая величина, характеризующая гравитационные и инерционные свойства объекта.
- Импульс ((vec p)) — это векторная величина, которая рассчитывается по формуле: (vec p=mtimesvec v)
где (m) — масса тела, а (vec v) — его скорость.
Импульс иллюстрирует, как механическое движение может передаваться от одного материального тела к другому.
- Импульс силы ((vec Fdt)) — векторная величина, которая по направлению совпадает с направлением силы и численно равняется произведению силы и времени ее воздействия на тело.
Виды сил
В динамике выделяют несколько видов сил, которые могут воздействовать на объект:
- сила притяжения;
- сила упругости;
- силы трения.
Закон всемирного тяготения, открытый Ньютоном, гласит, что сила ((F)) гравитационного притяжения между двумя телами массами ((m_1 и m_2)), которые находятся на расстоянии ((r)) друг от друга, пропорциональна обеим массам, обратно пропорциональна расстоянию в квадрате и действует вдоль прямой линии, соединяющей тела.
Сила притяжения определяется по формуле:
(F=Gtimesfrac{m_1times m_2}{r^2})
где (G) — гравитационная постоянная, которая равна (6,67times10^{-11} Н*м²/кг²)
Сила упругости — это сила, возникающая при упругой деформации тела.
Рассчитывается она по формуле:
(F=-ktimes x)
где (x) — величина деформации, (k) — коэффициент упругости, а знак – говорит о том, что направление силы упругости всегда противоположно тому направлению, куда смещается тело.
Силы трения возникают при движении касающихся друг друга объектов или их частей. Они бывают:
- сухого трения (сила скольжения, сила покоя);
- вязкого трения (характерно для перемещающихся слоев жидкости или газа).
Сила сухого трения определяется по формуле:
(F=ktimes N)
где (N) — сила нормального давления, а (k) — коэффициент сухого трения.
Сила вязкого трения зависит от скорости движения тела ((v)) и рассчитывается по формуле:
(F=-αtimes V)
(α) — коэффициент вязкого трения.
Разобрав основные динамические характеристики, можем переходить к основам динамики — законам Исаака Ньютона.
Первый закон Ньютона
Законы Ньютона, опубликованные им в 1687 году, лежат в основе механики. Они помогают описать движение тел с небольшими скоростями по сравнению со скоростью света.
Первый закон Ньютона предполагает существование таких систем отсчета, в которых материальные тела находятся в покое или движутся равномерно и по прямой, при условии, что на них нет воздействия каких-либо сил или действие этих сил скомпенсировано. Такие системы принято называть инерциальными. Все остальные законы Ньютона действительны именно для таких систем.
Первый закон Ньютона также часто называют законом инерции.
Инерция — это сохранение материальным объектом скорости и направления своего движения, при условии, что на него нет воздействия других тел и сил.
Второй закон Ньютона
Второй закон Ньютона иллюстрирует зависимость ускорения тела от его массы и силы, воздействующей на него. Причем чем больше сила, которая действует на объект, тем больше ускорение, которое тело приобретает.
Формулируется он в виде следующей формулы:
(vec a=frac{vec F}m)
где (vec F) — это векторная сила, воздействующая на объект;
(vec a) — векторное ускорение тела;
(m) — масса тела.
Читается так: ускорение, с которым движется объект, прямо пропорционально действующей на тело силе и обратно пропорционально массе тела.
Третий закон Ньютона
Третий закон великого английского ученого предполагает, что при воздействии одного тела на другое с определенной силой, второе тело действует на первое с такой же силой. Их часто называют силами действия и противодействия.
Математически закон выражается так:
(vec F_1=-vec F_2)
где (vec F_1) — это сила действия, а (vec F_2) — сила противодействия.
Формулируется так: объекты действуют друг на друга с силами, противоположными по направлению и равными по модулю.
Закон сохранения импульса
Закон сохранения импульса — это следствие из законов Ньютона: при движении тел в инерциальной системе без внешнего воздействия импульс сохраняется во времени, а при воздействии внешних сил на тело, скорость изменения импульса определяется суммой приложенных сил.
Математически это выражается так:
Точнее закон сохранения импульса можно сформулировать таким образом: векторная сумма импульсов всех тел, находящихся в системе, — величина постоянная, если внешнее воздействие на систему отсутствует или же их векторная сумма равна нулю.
Закон сохранения момента импульса
Закон сохранения момента импульса звучит так: момент импульса тел в замкнутой системе (в которой отсутствует воздействие внешних сил) относительно любой неподвижной точки не изменяется со временем.
Основное уравнение динамики вращательного движения
Работа и механическая энергия
Энергия — это способность физических объектов совершать определенную работу, поэтому количественно работа и энергия измеряются в одних и тех же единицах — джоулях (Дж).
Механическая работа будет численно равна изменениям механической энергии. Работа в механике бывает постоянной и переменной силы.
Работа постоянной и переменной силы
Сила, воздействующая на тело, когда перемещает его на определенное расстояние, совершает работу. В том случае, когда сила постоянна по величине и направлению, а движение прямолинейно, можно говорить о работе постоянной силы.
Если траектория движения объекта не прямолинейна, а сила, действующая на тело, не является постоянной, нужно говорить о работе переменной силы. Чтобы ее рассчитать, необходимо весь путь разбить на прямолинейные отрезки. Полная работа будет в таком случае равна сумме работ на всех прямолинейных участках.
Энергия
Энергия — это скалярная величина, которая является количественной мерой различных форм движения материи. Энергия, которая является мерой механического движения и механического взаимодействия тел с другими объектами и между собой, называется механической.
Изменение механической энергии системы ((Delta W)) определяется работой ((A)), которую совершают внешние силы, воздействующие на систему:
(Delta W=A)
Механическая энергия бывает двух видов:
- кинетической;
- потенциальной.
Кинетическая
Кинетическая энергия — это скалярная функция, которая является количественной мерой движения материальных тел, рассматриваемых в конкретной механической системе. Кинетическая энергия зависит только от массы ((m)) и модуля скорости материальной точки ((v)).
Рассчитывается кинетическая энергия ((E)) по формуле:
(E=frac{mtimes v^2}2)
Измеряется в джоулях.
Потенциальная
Потенциальная энергия — это физическая величина, которая обозначает энергию взаимодействия тел или их частей между собой. Потенциальная энергия зависит только от расстояния, на котором находятся объекты. Имеет числовое значение, но не имеет вектора направления.
Потенциальной энергией обладают следующие виды тел:
- объекты, находящиеся на какой-либо высоте от поверхности земли;
- упруго деформированные тела (пружина);
- сжатые газы.
Потенциальная энергия тела, поднятого над землей ((E)), рассчитывается по формуле:
(E=mtimes gtimes h)
где (m) — масса тела, (h) — высота над землей, (g) — ускорение свободного падения на нашей планете.
Потенциальная энергия упруго деформированного тела ((E)) определяется по формуле:
(E=frac{ktimes x^2}2)
где (x) — удлинение, (k) — жесткость.
Потенциальная энергия измеряется в джоулях.
Закон сохранения механической энергии
Закон сохранения энергии в механике известен всем со школы.
Энергия не исчезает и не возникает снова, она только переходит из одного вида энергии в другой или передается от одного объекта к другому.
Разобраться в такой сложной науке, как физика, довольно трудно. Не у всех есть время и желание вникать в процессы физических явлений. Но без паники! Подтянуть оценки по сложному предмету поможет образовательный сервис Феникс.Хелп. Обращайтесь в любое время!
