-
Графический метод решения задачи линейного программирования
Графическим
методом
решается стандартная задача линейного
программирования:
![]()
![]() ,
,
![]()
![]() ,
,
![]() .
.
Данный метод
основан на приведенной выше геометрической
интерпретации задачи ЛП. Нахождение
решения задачи ЛП графическим методом
имеет следующие этапы:
-
Строят
прямые (8), уравнения которых получаются
в результате замены в ограничениях
знаков неравенств на знаки точных
равенств. -
Находят полуплоскости,
определяемые каждым из ограничений
задачи. -
Находят многоугольник
решений как пересечение всех полуплоскостей -
Строят
начальную прямую (линию уровня целевой
функции), проходящую через начало
координат
 .
. -
Строят
вектор
 ,
,
представляемый градиент целевой функции
(5). -
Движением
прямой
 – const
– const
параллельно
самой себе в направлении вектора
либо находят точки, в которой целевая
функция принимает наибольшее (наименьшее)
значение, либо устанавливают
неограниченность сверху (снизу) целевой
функции на множестве планов. -
Определяют
координаты точки максимума (минимума)
целевой функции и вычисляют ее значение
в этих точках.
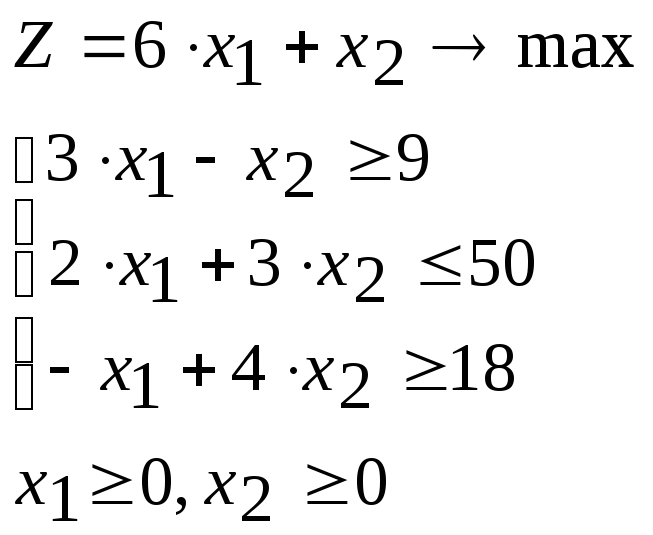
Пример.
Найти
наибольшее и наименьшее значения целевой
функции z
при заданных ограничениях:

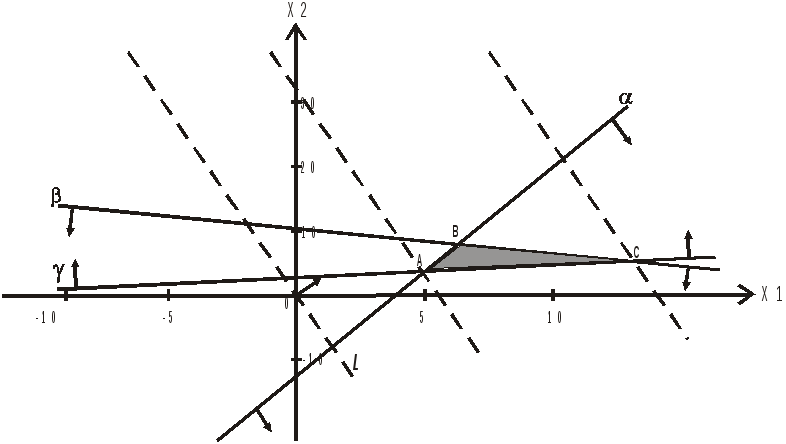
-
Строят прямые,
уравнения которых получаются в результате
замены в ограничениях знаков неравенств
на знаки точных равенств:

-
Каждое
ограничение-неравенство определяет
координатную полуплоскость. В зависимости
от знака неравенств при помощи двух
стрелок укажем требуемые полуплоскости. -
В
результате пересечения всех полуплоскостей
находят многоугольник решений (на
рисунке обозначен треугольником ABC). -
Построим
начальную прямую (линию уровня целевой
функции), проходящую через начало
координат
 .
. -
Движением
прямой
параллельно
самой себе в направлении вектора
 находим два крайних положения. Первое
находим два крайних положения. Первое
соответствует минимуму целевой функции
(точка А), второе – максимуму (точка С).
Рис.6. Графическая
интерпретация задачи линейного
программирования
-
Определим
координаты точек максимума и минимума
целевой функции и вычислим их значения
в найденных точках.
Максимальное
значение целевой функции
![]() .
.
Вообще,
с помощью графического метода может
быть решена задача ЛП, система ограничений
которой содержит n
неизвестных и m
линейно-независимых уравнений, если n
и
m
связаны соотношением
![]() .
.
Действительно,
пусть поставлена каноническая задача
ЛП: найти наибольшее значение
![]() (12)
(12)
при условиях
![]() ,
,
![]() (13),
(13),
![]() ,
,
![]() (14),
(14),
где
все уравнения (13) линейно независимы, и
выполняется соотношение
![]() .
.
Используя
метод Жордана-Гаусса, производим m
исключений, в результате которых система
ограничений примет вид:
![]() ,
,
![]()
![]() ,
,
![]() .
.
(15)
Учитывая
неравенства (14), эту систему уравнений
можно записать в виде системы неравенств
![]() ,
,![]() ,
,![]() ,
,![]() .
.
Исключая![]() из (12) при помощи уравнений (15), получим
из (12) при помощи уравнений (15), получим![]() ,
,
т.е. задачу вида (5-7).
-
Симплекс – метод решения задач линейного программирования
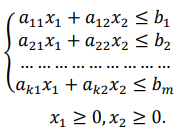
Введение.
Предположим, что
поставлена стандартная задача ЛП:
![]() ,
,
![]() ,
,
![]() ,
,
(16)
![]() ,
,
![]() .
.
Каждое
из условий типа неравенства определяет
полупространство, ограниченное
гиперплоскостью (плоскостью в k-мерном
пространстве). Пересечение соответствующих
полупространств образует выпуклый
многогранник (область допустимых решений
– ОДР), в котором необходимо найти максимум
(минимум) целевой функции. Внутри
многогранника условий в силу его
выпуклости линейная функция z
не может достигать максимума (минимума).
Её максимум (минимум), если он существует,
достигается обязательно в какой-нибудь
вершине многогранника или на одном из
его граней.
Теоретически
задача ЛП проста. Достаточно найти
конечное число вершин многогранника и
вычислить в них значения целевой функции.
Из всех этих значений выбрать то, которое
соответствует оптимальному решению.
Однако
простой перебор даже при использовании
самых современных ЭВМ практически
неосуществим из-за чрезвычайно большого
числа вершин. Поэтому возникла
необходимость применения методов
целенаправленного перебора, которые
приводят к решению задачи за приемлемое
время. Одним из таких методов является
симплекс-метод.
Симплексом
называется простейший выпуклый
многогранник. Решение задачи ЛП
симплекс-методом состоит в определении
одной из вершин многогранника условий
и последовательном переходе от одной
вершины к другой, причем каждый такой
переход приближает решение к оптимальному.
В этом заключается геометрический смысл
симплекс-метода.
Рассмотрим
каноническую задачу линейного
программирования:
![]()
![]() ,
,
![]() ,
,![]() , (17)
, (17)
![]() ,
,
![]() .
.
Здесь
систему ограничений представляет
система m
линейно независимых уравнений. Эта
система линейных уравнений имеет
бесконечное число решений. При этом
(n–m)
переменных могут принимать произвольные
значения (свободные переменные), а
остальные m
переменных выражаются через них (базисные
переменные).
Определение
7. Решение,
при котором все свободные переменные
равны нулю, называются базисным
решением.
Очевидно, что не
всякое базисное решение является
допустимым, т.е. принадлежит многограннику
условий, так как необходимо учесть
последние условия неотрицательности
всех переменных из (17).
Определение
8. Базисное
решение, удовлетворяющее условиям
неотрицательности всех переменных,
называется допустимым
базисным решением, или
опорным планом.
Определение
9. Опорный
план называется невырожденным,
если он содержит ровно m
положительных компонент, в противном
случае, он называется вырожденным.
На
каждой грани многогранника условий
какая-либо переменная тождественно
равна нулю. Например, из (16), (18) видно,
что гиперплоскость
![]() ,
,
которая, возможно, является одной из
сторон многогранника условий, соответствует
условию![]() .
.
Поэтому в каждой вершине многогранника
условий обращаются в нуль ровно столько
переменных, сколько свободных. Таким
образом, допустимое решение, соответствующее
какой-либо вершине многогранника
условий, необходимо искать среди
множества базисных решений.
Алгоритм
симплекс-метода.
Первоначально
задача ЛП записывается в канонической
форме (17), и находится произвольное
базисное решение. Если решение
недопустимое, то проверяется совместность
ограничений, и, в случае совместности,
из базиса вычеркивается определенная
переменная, а вместо неё вводится другая.
Тем самым, находится новое базисное
решение. Если же базисное решение
допустимое (т.е. найден опорный план,
соответствующий одной из вершин
многогранника условий), то решение
проверяется на оптимальность. В случае
неоптимальности допустимого базисного
решения, устанавливается ограниченность
целевой функции, и вновь производится
обмен между базисными и свободными
переменными, который геометрически
означает переход к другой вершине
многогранника.
В
результате многократного повторения
указанного процесса, либо будет получено
оптимальное решение, либо будет выявлена
противоречивость ограничений
(несуществование ОДР), либо будет видно,
что целевая функция неограничена.
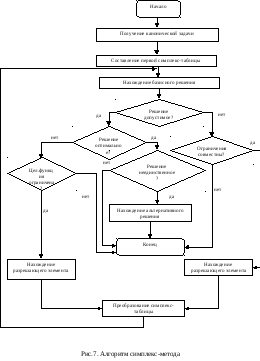
Алгоритм
симплекс-метода представлен при помощи
блочных структур на рис.7.
При
решении задачи симплекс-методом удобно
пользоваться так называемыми
симплекс-таблицами. Приведем некоторые
пояснения к алгоритму нахождения
оптимального решения, основанного на
последовательных переходах от одной
симплекс-таблицы к другой.
Представление
исходных данных задачи в виде
симплекс-таблицы (первая симплекс-таблица).
Для получения симплекс-таблицы общую
или стандартную задачу ЛП необходимо
привести в канонический вид и разрешить
систему линейных уравнений (например,
методом Гаусса-Жордана) относительно
выделенных базисных переменных. Далее,
следует при помощи выражений для базисных
переменных выразить целевую функцию
через свободные переменные.
При
составлении первой симплекс-таблицы
на основе разрешенной системы линейных
уравнений, свободные члены записываются
без изменения знаков, а коэффициенты
при свободных переменных – с противоположными
знаками. Предположим для определенности,
дана стандартная задача ЛП в виде (16).
Введя дополнительные неотрицательные
переменные
![]() ,
,
получим соответствующую каноническую
задачу ЛП:
![]() ,
,
![]() ,
,
![]() , (18)
, (18)
![]() ,
,
![]() .
.
Предполагая,
что
![]() и равенство нулю некоторых
и равенство нулю некоторых![]() ,
,
эту задачу можно записать в виде (17).
В
данном случае удобно в качестве базисных
переменных выбрать
![]() ,
,
относительно которых легко решить
систему уравнений. Поэтому из (18) следует
 ,
,
![]() ,
,
![]() , (19)
, (19)
![]() ,
,
![]() ,
,
где![]() ,
,![]() ,
,![]() .
.
Из
такой записи канонической задачи ЛП
составляют симплекс-таблицу (см. Таб.1).
В дальнейшем эта
таблица подвергается анализу, и в случае
необходимости проводится такое
преобразование, когда одна переменная
из свободных переходит в базисные, а
одна базисная – в свободные.
Таб.1.
Составление первой симплекс-таблицы
|
Базисные |
Свободные члены |
Свободные |
||||
|
|
… |
|
… |
|
||
|
|
|
|
… |
|
… |
|
|
… |
… |
… |
… |
… |
… |
… |
|
|
|
|
… |
|
… |
|
|
… |
… |
… |
… |
… |
… |
… |
|
|
|
|
… |
|
… |
|
|
Целевая |
|
|
… |
|
… |
|


Нахождение
базисного решения.
В базисном решении все свободные
переменные равны нулю, и поэтому базисные
переменные равны свободным членам (см.
(19) и Таб.1):
![]() .
.
Проверка
допустимости базисного решения.
Признак
1. (Признак допустимости базисного
решения).
Решение будет допустимым, если в
симплекс-таблице все свободные члены
(кроме строки целевой функции)
неотрицательные.
Проверка
совместности ограничений.
Если базисное решение недопустимо, то
необходимое проверить совместность
ограничений, т.е. наличие ОДР. Геометрическая
интерпретация несовместности ограничений
показана на рис.5.
Признак
2. (Признак несовместности ограничений).
Ограничения несовместны, если в любой
строке (кроме строки целевой функции),
имеющей отрицательный свободный член,
нет ни одного отрицательного элемента.
Наличие отрицательного элемента дает
возможность произвести такой обмен
переменных, когда новая базисная
переменная возможно станет неотрицательной.
Если несовместность
по изложенному признаку не выявлена,
то необходимо произвести преобразование
симплекс-таблицы (обмен переменных),
цель которого нахождение нового базисного
решения.
Проверка
оптимальности решения.
Если базисное решение допустимое, то
решение проверяется на оптимальность
с помощью следующего признака.
Признак
3. (Признак оптимальности решения).
Целевая функция будет иметь максимальное
(минимальное)
значение, если в строке целевой
функции все элементы, кроме свободного
члена, положительные
(отрицательные).
Проверка
ограниченности целевой функции.
Если допустимое базисное решение
неоптимальное, то необходимо проверить
существование оптимального решения,
т.е. ограниченности целевой функции.
Геометрическая интерпретация
неограниченности целевой функции
показана на рис.4.
Признак
4. (Признак ограниченности целевой
функции).
Целевая функция ограничена сверху
(снизу), т.е. существует максимальное
(минимальное) значение целевой функции,
если на каждой итерации в каждом столбце,
не удовлетворяющем признаку оптимальности,
есть хотя бы один положительный элемент.
Если не выявлено
несуществование оптимального решения
по этому признаку, то итерацию необходимо
повторить, т.е. преобразованием
симплекс-таблицы перейти к новому
базисному решению.
Проверка
неединственности решения.
Признак
5. (Признак неединственности оптимального
решения).
Если в строке целевой функции оптимального
решения, кроме столбца свободных членов,
есть хотя бы один нулевой элемент, то
полученное оптимальное решение является
неединственным.
Это
означает, что есть другой набор значений
переменных, при котором целевая функция
будет иметь такое же оптимальное
значение.
Таким
образом, анализ симплекс-таблицы может
привести к необходимости её преобразования,
переходу к новому базисному решению.
Для этого необходимо найти разрешающий
элемент.
Нахождение
разрешающего элемента.
Разрешающий элемент указывает одну
свободную и одну базисную переменные,
которые следует обменять, чтобы получить
новое “улучшенное” базисное решение.
Шаг 1. Нахождение
разрешающего столбца.
-
базисное
решение недопустимое, ограничения
совместны.
В
строке, содержащей отрицательный
свободный член, выбирается отрицательный
элемент. Столбец, в котором находится
выбранный элемент, принимается в качестве
разрешающего.
-
базисное
решение допустимое, неоптимальное.
В
качестве разрешающего столбца принимается
любой столбец, неудовлетворяющий
признаку оптимальности.
Шаг
2. Нахождение разрешающей строки.
Определяются
положительные отношения свободных
членов к элементам разрешающего столбца
![]() ,
,![]() ,
,
гдеl
– число строк, в которых
![]() имеют одинаковый знак. В качестве
имеют одинаковый знак. В качестве
разрешающей, выбирается та строка, для
которой найденное значение минимальное,
т.е.![]() .
.
Разрешающие строка
и столбец в Таб.1 помечены стрелками,
разрешающий элемент выделен рамкой.
Замечание.
Если выбор разрешающего элемента
неоднозначный, то можно выбрать любой
из них. Это может несущественно повлиять
лишь на количество итераций, но не влияет
на оптимальное решение. Обеспечение
минимального количества итераций здесь
не рассматривается, однако, рекомендуется
выбрать наименьший, если элемент
отрицательный и наибольший, если
выбираемый элемент положительный.
Преобразование
симплекс-таблицы.
Как уже отмечалось, преобразование
симплекс-таблицы заключается в обмене
переменных. Предположим, что разрешающий
элемент является
![]() ,
,
который выделен рамкой в Таб.1. Тогда
базисную переменную![]() необходимо перевести всвободные,
необходимо перевести всвободные,
а свободную переменную
![]() – в базисные.Переход
– в базисные.Переход
от одной таблицы к другой выполняется
по следующему алгоритму.
Шаг
1. Ячейка
разрешающего элемента заполняется
значением
![]() ,
,
обратным значению разрешающего элемента.
Шаг
2. Ячейки
разрешающей строки заполняются
элементами, стоящими в этих ячейках,
деленными на разрешающий элемент, т.е.
![]() ,
,![]() ,
,![]()
![]() ,
,![]() .
.
(20)
Шаг
3. Ячейки
разрешающего столбца заполняются
элементами, стоящими в этих ячейках,
деленными на разрешающий элемент с
обратным знаком, т.е.
![]() ,
,![]() ,
,![]() ,
,![]() .
.
(21)
Шаг
4. Остальные
ячейки
![]() ,
,![]() ,
,![]() заполняются значениями, стоящими в этих
заполняются значениями, стоящими в этих
ячейках, минус произведение элементов,
стоящих в соответствующем разрешающем
столбце и в соответствующей разрешающей
строке, деленное на разрешающий элемент,
т.е.
![]() ,
,
![]() ,
,
(22)
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,![]() ,
,![]() .
.
В
силу того, что на шаге 3 значения элементов
пересчитанного разрешающего столбца
![]() уже определены, то вычисления по формулам
уже определены, то вычисления по формулам
(22) можно сократить.
В
результате преобразования получим
новую симплекс-таблицу (Таб.2).
Таб.2.
Преобразование симплекс-таблицы
|
Базисные переменные |
Свободные члены |
Свободные |
||||
|
|
… |
|
… |
|
||
|
|
|
|
… |
|
… |
|
|
… |
… |
… |
… |
… |
… |
… |
|
|
|
|
… |
|
… |
|
|
… |
… |
… |
… |
… |
… |
… |
|
|
|
|
… |
|
… |
|
|
Целевая |
|
|
… |
|
… |
|
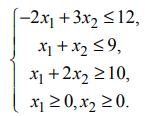
Пример.
Найти
наибольшее значение целевой функции z
при заданных ограничениях:
Исходную
стандартную задачу линейного
программирования (СЗЛП) приведем к
каноническому виду (КЗЛП). Для этого
введем дополнительные переменные,
учитывая знаки неравенств-ограничений.
Если ограничение-неравенство имеет
знак «≥»,
то
дополнительную переменную вводим со
знаком «-», в противном случае – со
знаком «+».
СЗЛП
КЗЛП



В
качестве базисных переменных удобно
выбрать
![]() ,
,
так как относительно этих переменных
легко решить систему линейных уравнений:![]() – базисные переменные;
– базисные переменные;![]() – свободные переменные.
– свободные переменные.

Составим
первую симплекс-таблицу: свободные
члены записываем без изменения знаков,
а коэффициенты при свободных переменных
– с противоположными знаками.
|
Базисные |
Свободные |
Свободные |
|
|
x1 |
x2 |
||
|
x3 |
-9 |
-3 |
1 |
|
x4 |
50 |
2 |
3 |
|
x5 |
-18 |
1 |
– |
|
Z |
0 |
-6 |
-1 |
 4
4

Базисное
решение
![]() – недопустимое, т.к. имеются отрицательные
– недопустимое, т.к. имеются отрицательные
элементы (![]() ).
).
Данная симплекс-таблица соответствует
точке начала координат на рис.6. Ограничения
совместны, т.к. в строках с отрицательными
свободными членами имеются ещё
отрицательные элементы. Необходимо
найти разрешающий элемент и провести
преобразование симплекс-таблицы.
Найдём
разрешающий элемент. Выберем наименьший
отрицательный элемент в строках с
отрицательными свободными членами. Это
-4.
Столбец, в котором находится этот элемент
(![]() ),
),
принимаем в качестве разрешающего
столбца (помечен стрелкой).
Для
нахождения разрешающей строки определяем
минимальное положительное отношение
свободных членов к элементам разрешающего
столбца. Так как
![]() ,
,
то в качестве разрешающей строки получаем![]() .
.
Элемент,
находящийся на пересечении разрешающих
столбца и строки, является разрешающим
элементом (выделен рамкой). Он указывает,
что базисную переменную
![]() переводим в свободные, а свободную
переводим в свободные, а свободную
переменную![]() – в базисные.
– в базисные.
Преобразуем
симплекс-таблицу, используя правила
преобразования:
-
Ячейку
разрешающего элемента, равного «-4»,
заполняем значением, обратным значению
разрешающего элемента (-1/4=-0,25). -
Ячейки
разрешающей строки
 заполняем элементами, стоящими в этих
заполняем элементами, стоящими в этих
ячейках, деленными на разрешающий
элемент «-4». Например, элемент, находящийся
на пересечении столбца свободных членов
и строки,
будет равен .
. -
Ячейки
разрешающего столбца заполняем
элементами, стоящими в этих ячейках,
деленными на разрешающий элемент с
обратным знаком «4». В частности, элемент,
находящийся на пересечении столбца
и строки ,
,
будет равен .
. -
Остальные
ячейки заполняем значениями, стоящими
в этих ячейках, минус произведение
элементов, стоящих в соответствующем
разрешающем столбце и в соответствующей
разрешающей строке, деленное на
разрешающий элемент «-4». Например,
элемент, находящийся на пересечении
столбца свободных членов и строки
,
будет равен .
.
В
результате преобразования симплекс-таблицы
получим:
|
Базисные |
Свободные |
Свободные |
|
|
x1 |
x5 |
||
|
x3 |
|
|
|
|
x4 |
|
|
|
|
x2 |
|
|
|
|
Z |
|
|
|


Базисное
решение
![]() – недопустимое, т.к. есть отрицательный
– недопустимое, т.к. есть отрицательный
элемент (![]() ).
).
Ограничения совместны, т.к. в строке с
отрицательным свободным членом имеется
ещё отрицательный элемент.
В
качестве разрешающего столбца выбираем
столбец
![]() .
.
Вычисляя ,
,
получаем, что в качестве разрешающей
строки следует выбрать![]() .
.
Базисную переменную![]() переводим в свободные, а свободную
переводим в свободные, а свободную
переменную![]() – в базисные.
– в базисные.
В
результате преобразования симплекс-таблицы
получили следующую таблицу:
|
Базисные |
Свободные |
Свободные |
|
|
x3 |
x5 |
||
|
x1 |
|
|
|
|
x4 |
23 |
1 |
1 |
|
x2 |
|
|
|
|
Z |
|
|
|


Базисное
решение
![]() – допустимое, т.к. все свободные члены
– допустимое, т.к. все свободные члены
положительные. Решение оптимальное
(минимум целевой функции), поскольку в
строке целевой функции, кроме столбца
свободных членов, все элементы одного
знака (отрицательные). Оптимальное
решение единственное, т.к. в строке
целевой функции нет нулевых элементов.
Данная симплекс-таблица соответствует
точке А на рис.6.
Но поскольку
требуется найти максимальное значение
целевой функции, то итерации продолжаются.
В
качестве разрешающего столбца можно
выбрать любой столбец таблицы, т.к. они
оба не удовлетворяют признаку оптимальности
(максимуму). Выбираем столбец
![]() .
.
Тогда разрешающей строкой будет строка![]() ,
,
т.к.![]() .
.
В результате
преобразований получим следующую
симплекс-таблицу:
Таб.3.
Симплекс-таблица оптимального решения
|
Базисные |
Свободные |
Свободные |
|
|
x4 |
x5 |
||
|
x1 |
|
|
|
|
x3 |
23 |
1 |
1 |
|
x2 |
|
|
|
|
Z |
|
|
|
Базисное
решение
![]() – допустимое, т.к. все свободные члены
– допустимое, т.к. все свободные члены
положительные. Решение оптимальное
(максимум целевой функции), поскольку
в строке целевой функции все элементы
одного знака (положительные). Оптимальное
решение единственное, т.к. в строке
целевой функции нет нулевых элементов.
Данная симплекс-таблица соответствует
точке С на рис.6.
Таким
образом, наибольшее значение
![]() целевая функция имеет при
целевая функция имеет при![]() .
.
Для решения задач линейного программирования разработано множество методов, но наиболее популярными из них являются графический, симплексный и двойственный методы, которые мы и рассмотрим далее в нашей исследовательской работе.
Если что-то непонятно — вы всегда можете написать мне в WhatsApp и я вам помогу!
Возможно эта страница вам будет полезна:

Графический метод решения задач линейного программирования
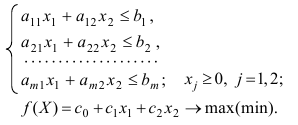
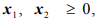
Рассмотрим задачу линейного программирования в стандартной форме записи с двумя переменными

при условиях:
Необходимо найти вектор  , удовлетворяющий данной математической модели.
, удовлетворяющий данной математической модели.
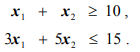
При решении, прежде всего, необходимо найти область допустимых решений системы неравенств (3.2). Рассмотрим декартову систему координат  . Заменив каждое из неравенств (3.2) равенством, строим соответствующую ему граничную прямую
. Заменив каждое из неравенств (3.2) равенством, строим соответствующую ему граничную прямую  . На рисунке 1 видно, как эта прямая делит плоскость на две полуплоскости [3].
. На рисунке 1 видно, как эта прямая делит плоскость на две полуплоскости [3].
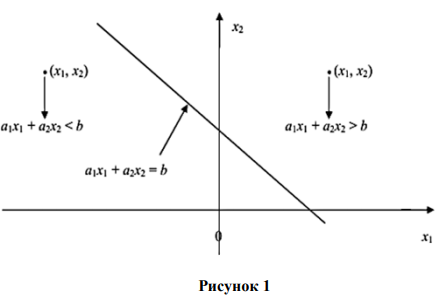
Чтобы определить, какую именно полуплоскость определяет данное неравенство, достаточно взять произвольную точку плоскости ( ) (например, начало координат) и подставить в неравенство числа . Если оно удовлетворится, то полуплоскость, в которой лежит данная точка — искомая. В противном случае нужная полуплоскость лежит по другую сторону прямой
) (например, начало координат) и подставить в неравенство числа . Если оно удовлетворится, то полуплоскость, в которой лежит данная точка — искомая. В противном случае нужная полуплоскость лежит по другую сторону прямой  [26].
[26].
Для нахождения области допустимых решений строим граничные прямые полуплоскости, соответствующие всем неравенствам. Общая часть («пересечение») всех этих полуплоскостей будет решением системы неравенств данной задачи.
При нахождении области допустимых решений (ОДР) задачи линейного программирования может встретиться один из четырех случаев, рассмотренных в таблице 4:
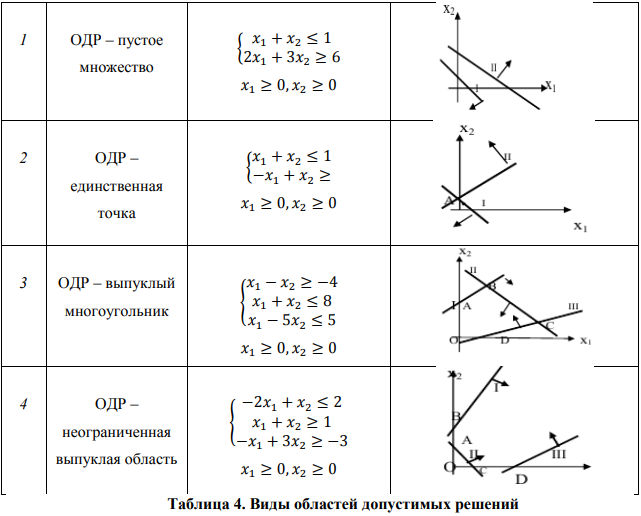
Рассмотренные примеры позволяют сделать вывод о том, что область допустимых решений системы неравенств может быть пустой, одной точкой, выпуклым многоугольником или неограниченной выпуклой областью.
Согласно теореме, описанной в предыдущем параграфе, оптимальное решение ЗЛП находится в одной из угловых точек многоугольника допустимых решений. Поэтому решение задачи с ограниченной целевой функцией и не слишком большим числом угловых точек может быть найдено перебором этих угловых точек.
Рассмотрим целевую функцию

Уравнение

при фиксированном значении  определяет прямую, а при изменении — семейство параллельных прямых с параметром . Вдоль каждой из этих прямых функция цели принимает одно и то же фиксированное значение, поэтому эти линии называют линиями уровня целевой функции [24].
определяет прямую, а при изменении — семейство параллельных прямых с параметром . Вдоль каждой из этих прямых функция цели принимает одно и то же фиксированное значение, поэтому эти линии называют линиями уровня целевой функции [24].
Для решения задачи необходимо среди точек области допустимых решений найти такую точку (точки), в которой целевая функция принимает максимальное значение.
Для этого построим вектор-градиент  , компонентами которого являются коэффициенты при неизвестных целевой функции, и линию уровня целевой функции, которая имеет уравнение
, компонентами которого являются коэффициенты при неизвестных целевой функции, и линию уровня целевой функции, которая имеет уравнение 
 и обладает тем свойством, что она перпендикулярна вектору
и обладает тем свойством, что она перпендикулярна вектору  .
.
Линию уровня в направлении вектора перемещаем до тех пор, пока она не сместится в область недопустимых значений, и все еще будет иметь одну общую точку с ОДР, координаты которой находим из пересечения соответствующих прямых [5].
Таким образом, можно определить алгоритм геометрического (графического) решения задач линейного программирования:
- Записать уравнения прямых, соответствующих ограничениям, и построить их на плоскости
 .
. - Определить области, в которых выполняются ограничения задачи.
- Определить область допустимых решений задачи как область пересечения полуплоскостей, соответствующих ограничениям задачи.
- Определить направление возрастания (убывания) целевой функции
- Определить граничную точку или точки области допустимых решений, в которых целевая функция принимает максимальное (минимальное) значение.
- Определить координаты найденной точки, решая систему уравнений, состоящую из уравнений прямых, на пересечении которых находится эта точка, или выявляя уравнение граничной прямой области допустимых решений, с которой совпадает линия уровня целевой функции.
 .
. полуплоскостей, соответствующих ограничениям задачи.
полуплоскостей, соответствующих ограничениям задачи.
Графический метод решения задачи линейного программирования состоит из двух этапов:
- Построение пространства допустимых решений, удовлетворяющих всем ограничениям модели.
- Поиск оптимального решения среди всех точек пространства допустимых решений.
Применение графического метода удобнее рассмотреть на конкретных примерах в двух постановках: для максимума и минимума целевой функции.
Примеры с решением
Пример решения задачи №1:
Задана стандартная математическая модель задачи с двумя неизвестными:
Нахождение решения этой модели на основе ее геометрической интерпретации включает следующие этапы.
- В плоскости строят прямые, уравнения которых получаются в результате замены в ограничениях (2.1) модели знаков неравенств на знаки точных равенств.
- Находят полуплоскости, определенные каждым неравенством системы.
- Находят выпуклый многоугольник решений всей системы (2.1).
- Строят нормальный вектор целевой функции , причем, начало вектора совмещают с началом координат и строят прямую .
- Передвигают эту прямую в направлении вектора , в результате либо находят вершину или отрезок, в которой целевая функция принимает наибольшее значение, либо устанавливают неограниченность сверху этой функции на множестве допустимых решений.
- Если функция ограничена, то определяют , вычисляют значение функции в этой точке .
 строят прямые, уравнения которых получаются в результате замены в ограничениях (2.1) модели знаков неравенств на знаки точных равенств.
строят прямые, уравнения которых получаются в результате замены в ограничениях (2.1) модели знаков неравенств на знаки точных равенств. , причем, начало вектора совмещают с началом координат и строят прямую
, причем, начало вектора совмещают с началом координат и строят прямую  .
. , в результате либо находят вершину или отрезок, в которой целевая функция принимает наибольшее значение, либо устанавливают неограниченность сверху этой функции на множестве допустимых решений.
, в результате либо находят вершину или отрезок, в которой целевая функция принимает наибольшее значение, либо устанавливают неограниченность сверху этой функции на множестве допустимых решений. , вычисляют значение функции в этой точке
, вычисляют значение функции в этой точке При геометрической интерпретации задач ЛП могут встретиться случаи, изображенные на рис. 2.1. — 2.4.
Рис. 2.1. Задача ЛП имеет единственное решение  .
.
Рис. 2.2. Задача ЛП имеет бесчисленное множество решений, т.к. целевая функция достигает максимума на отрезке  .
.
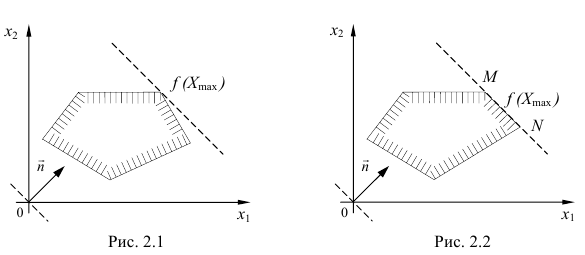
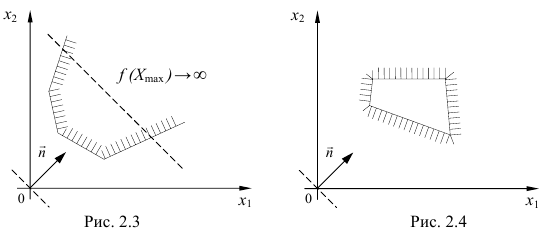
Рис. 2.3. Задача ЛП не имеет решения, т.к. функция неограниченна сверху.
Рис. 2.4. Задача ЛП не имеет решения, т.к. система (2.1) несовместна.
Пример решения задачи №2:
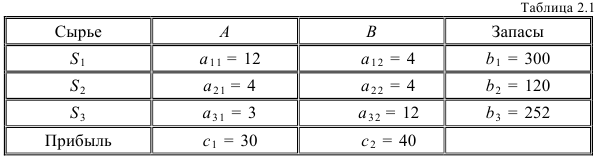
Для производства двух видов изделий  и
и  предприятие использует три вида сырья
предприятие использует три вида сырья  . Нормы расхода сырья каждого вида на изготовление единицы продукции данного вида приведены в табл. 2.1.
. Нормы расхода сырья каждого вида на изготовление единицы продукции данного вида приведены в табл. 2.1.
Прибыль от реализации одного изделия каждого вида равна  и
и  , а общее количество сырья вида
, а общее количество сырья вида  равно
равно  . Считая, что изделия и могут производиться в любых соотношениях (сбыт обеспечен), требуется составить такой план их выпуска, при котором прибыль предприятия от реализации всех изделий будет максимальной.
. Считая, что изделия и могут производиться в любых соотношениях (сбыт обеспечен), требуется составить такой план их выпуска, при котором прибыль предприятия от реализации всех изделий будет максимальной.
Решение. Обозначим через  и
и  количество изделий первого и второго вида в плане предприятия. Поскольку производство продукции ограничено только сырьем каждого типа то получим условия:
количество изделий первого и второго вида в плане предприятия. Поскольку производство продукции ограничено только сырьем каждого типа то получим условия:
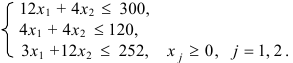
Переменные и не могут быть отрицательными по смыслу задачи. Вычислим прибыль от реализации продукции и получим:

Итак, мы получили стандартную модель с двумя переменными.
Решим задачу линейного программирования геометрически, придерживаясь плана, приведенного ранее.
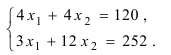
- Строим прямые :
 :
:
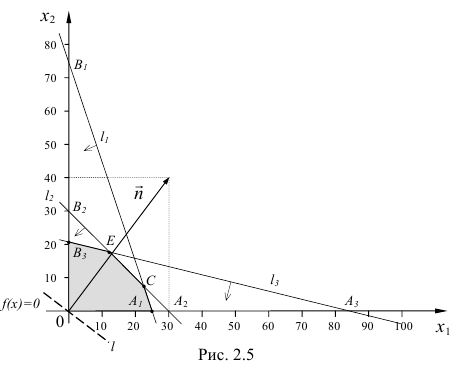
Обратимся к неравенствам (2.3). Отмстим те полуплоскости, которые им удовлетворяют. Учтем на чертеже и неотрицательность переменных и , и получим многоугольник  решений данной системы неравенств (см. рис. 2.5).
решений данной системы неравенств (см. рис. 2.5).
- Запишем окончательный ответ:

Наибольшая прибыль будет равна 1080 (у.е).
Пример решения задачи №3:
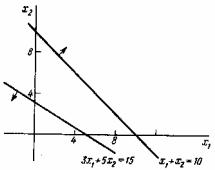
Минимизировать функцию

при ограничениях 
Допустимой областью, изображенной на рис. 1.2, является чегырехугольник  . Два последних ограничения усиливают условия неотрицательности. Функция
. Два последних ограничения усиливают условия неотрицательности. Функция  убывает в направлении вектора
убывает в направлении вектора

Минимальное значение функции = — 68 и достигается в точке  = (12,8). Заметим, что, как и в примере разд. 1.1, минимум достигается в вершине допустимой области. Оптимальным решением задачи является точках = 2, = 8 с минимальным значением функции = — 68.
= (12,8). Заметим, что, как и в примере разд. 1.1, минимум достигается в вершине допустимой области. Оптимальным решением задачи является точках = 2, = 8 с минимальным значением функции = — 68.
Иногда задача имеет более чем одно оптимальное решение.
Пример решения задачи №4:
Минимизировать функцию

при ограничениях
На рис. 1.3 чегырехугольник  изображает допустимую область
изображает допустимую область  ,
,  , и, таким образом, вектор
, и, таким образом, вектор  указывает направление убывания функции .
указывает направление убывания функции .
Любая точка на отрезке  является оптимальным решением. В частности, в вершинах
является оптимальным решением. В частности, в вершинах 
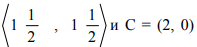 достигаются оптимальные решения, соответствующие одному и тому же минимальному значению функции =-12.
достигаются оптимальные решения, соответствующие одному и тому же минимальному значению функции =-12.
Любая точка на отрезке представляется формулой

где

Для каждой такой точки значение функции равно

Функция имеет единственное минимальное значение.
Иногда решение задачи не ограничено.
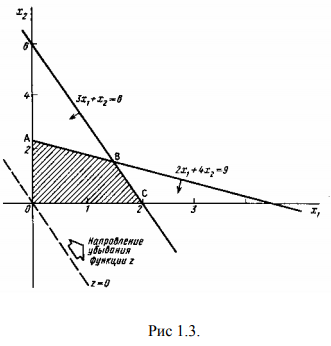
Пример решения задачи №5:
Максимизировать функцию

при ограничениях

Допустимая область, изображенная на рис. 1.4, не ограничена в направлении, в котором функция возрастает, т. е. в допустимой области не существует конечной точки, в которой функция достигала бы максимума. Решение, как и максимальное значение функции , не ограничено. Однако некоторые задачи с неограниченными допустимыми областями имеют конечные решения. Например, задача максимизации функции  при ограничениях из примера 3 имеет конечное решение.
при ограничениях из примера 3 имеет конечное решение.
Разумеется, если бы задача состояла в минимизации функции  , при тех же ограничениях, то минимум достигался бы в единственной точке
, при тех же ограничениях, то минимум достигался бы в единственной точке  в вершине допустимой области
в вершине допустимой области  .
.
Иногда задача не имеет решения, поскольку допустимой области не существует.
Пример решения задачи №6:
Минимизировать функцию

при ограничениях
Ограничения задачи противоречивы, поэтому нет допустимых решений (рис. 1.5).
Уже из рассмотренных выше примеров можно вывести несколько характерных черт задач линейного программирования. Во-первых, допустимая область всегда является выпуклым многоугольником, даже в случае, когда она не ограничена. Во-вторых, оптимальное решение всегда достигается в вершинах допустимой области. В примере 2 и вершина  , и вершина
, и вершина  являются оптимальными точками.
являются оптимальными точками.
Эти результаты могут быть обобщены. Сначала покажем, что задачи линейного программирования могут быть приведены к стандартной форме.
Пример решения задачи №7:
Найти максимум функции  при ограничениях
при ограничениях
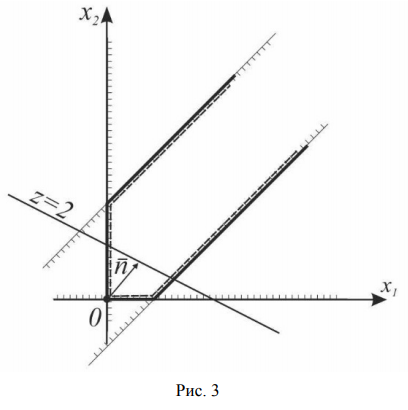
На рис. 3 изображены: неограниченная многогранная область решений данной системы ограничений-неравенств, линия уровня  , вектор
, вектор  . Функция
. Функция  может неограниченно возрастать при заданной системе ограничений, поэтому
может неограниченно возрастать при заданной системе ограничений, поэтому  .
.
Пример решения задачи №8:
Найти максимум функции  при ограничениях
при ограничениях
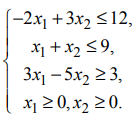
Изображенная на рис. 4 область не содержит ни одной общей точки, которая удовлетворяла бы всем неравенствам системы ограничений, т.е. система ограничений противоречива и не может содержать ни одного решения, в том числе и оптимального.
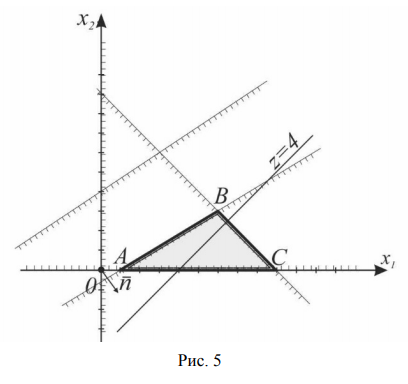
Пример решения задачи №9:
Найти максимум функции при ограничениях
Всем неравенствам системы ограничений удовлетворяют точки треугольника  , который и является областью решений (рис. 5). Максимальное значение
, который и является областью решений (рис. 5). Максимальное значение  . При построении треугольника не использовали прямые
. При построении треугольника не использовали прямые  , хотя все точки этого треугольника удовлетворяют неравенствам
, хотя все точки этого треугольника удовлетворяют неравенствам  . Таким образом, эти неравенства лишние в системе ограничений.
. Таким образом, эти неравенства лишние в системе ограничений.
Пример решения задачи №10:
Найти минимум функции  при ограничениях
при ограничениях
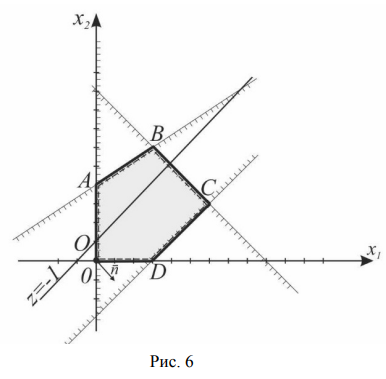
Областью решений данной системы ограничений является треугольник (рис. 7).
На рис. 7 также изображены исходная линия уровня  и вектор
и вектор  . Так как требуется найти минимум функции, то будем передвигать исходную линию уровня в сторону, противоположную
. Так как требуется найти минимум функции, то будем передвигать исходную линию уровня в сторону, противоположную  . Минимум функции достигается в угловой точке
. Минимум функции достигается в угловой точке  , координаты которой служат решением системы уравнений
, координаты которой служат решением системы уравнений
т.е.
Опорнои прямой называется линия уровня, которая имеет хотя бы одну общую точку с областью допустимых решений и по отношению к которой эта область находится в одной из полуплоскостей.
Область допустимых решений любой задачи имеет не более двух опорных прямых, на одной из которых может находиться оптимальное решение.
На основании приведенных примеров и определения опорной прямой запишем этапы нахождения решения задачи линейного программирования с двумя переменными графическим методом:
- Изображаем область допустимых решений.
- Если область допустимых решений является пустым множеством, то задача не имеет решения ввиду несовместности системы ограничений.
- Если область допустимых решений является непустым множеством, то изображаем нормальный вектор линий уровня и одну из линий уровня, имеющую общие точки с этой областью.
- Линию уровня перемещаем до опорной прямой в задаче на максимум в направлении нормали, в задаче на минимум — в противоположном направлении.
- Если при перемещении линии уровня по области допустимых решений в направлении, соответствующем приближению к максимуму (минимуму) целевой функции, линия уровня уходит в бесконечность, то .
- Если задача линейного программирования имеет оптимальное решение, то для его нахождения решаем систему из уравнений прямых, ограничивающих область допустимых решений и имеющих общие точки с соответствующей опорой прямой. Если целевая функция достигает экстремума в двух угловых точках, то задача имеет бесконечное множество решений. Оптимальным решением является любая выпуклая линейная комбинация этих точек.
- Вычисляем значение целевой функции на оптимальном решении.
 линий уровня и одну из линий уровня, имеющую общие точки с этой областью.
линий уровня и одну из линий уровня, имеющую общие точки с этой областью. .
.Графическим методом решаются задачи линейного программирования, записанные в каноническом виде и удовлетворяющие условию  , где
, где  — число неизвестных системы ограничений;
— число неизвестных системы ограничений;  — ранг системы векторов условий. Если уравнения системы ограничений линейно независимы, то ранг равен числу уравнений системы
— ранг системы векторов условий. Если уравнения системы ограничений линейно независимы, то ранг равен числу уравнений системы  .
.
Возможно эти страницы вам будут полезны:
- Решение задач по математическому программированиюПримеры решения задач по математическому программированиюЗаказать работу по математическому программированиюПомощь по математическому программированиюЗадачи математического программированияЗадача линейного программированияРешение задач по линейному программированиюМетоды решения задач линейного программированияГрафический метод решения задач линейного программированияЗаказать работу по линейному программированиюПомощь по линейному программированиюКонтрольная работа по линейному программированиюЛинейное программирование в ExcelКурсовая работа по линейному программированию

Решение задач линейного программирования
графическим методом
Существуют два наиболее распространенных способа решения задач линейного программирования (ЗЛП): графический метод и симплекс-метод. Графический метод существенно нагляднее и обычно проще для понимания и решения (хотя занимает много времени, так как требует тщательного построения чертежа). Также этот метод позволяет практически одновременно найти решение на минимум и максимум, тогда как симплекс-методом придется делать “два подхода”.
Основные шаги по решению ЗПЛ графическим методом следующие: построить область допустимых решений задачи (выпуклый многоугольник), который определяется как пересечение полуплоскостей, соответствующих неравенствам задачи, построить линию уровня целевой функции, и, наконец, двигать линию уровня в нужном направлении, пока не достигнем крайней точки области – оптимальной точки (или множества). При этом можно найти единственное оптимальное решение (точку), множество (отрезок) или ни одного (область пустая или не ограниченная в нужном направлении).
А за конкретикой – к примерам ниже: вы найдете там решенные графическим способом задачи линейного программирования. Примеры решений выложены бесплатно для вашего удобства – изучайте, ищите похожие, решайте. Если вам нужна помощь в выполнении заданий по методам оптимальных решений, перейдите в раздел: Решение задач ЛП на заказ (решаем для студентов очников и заочников).
Понравилось? Добавьте в закладки
Графический метод решения ЗЛП: примеры онлайн
Задача 1. Колхоз имеет возможность приобрести не более 19 трехтонных автомашин и не более 17 пятитонных. Отпускная цена трехтонного грузовика – 4000 руб., пятитонного – 5000 руб. Колхоз может выделить для приобретения автомашин 141 тысяч рублей. Сколько нужно приобрести автомашин, чтобы их суммарная грузоподъемность была максимальной?
Задачу решить графическими и аналитическими методами.
Задача 2. Решить задачу графическим методом на минимум и на максимум
Задача 3. Решить задачу графическим методом на минимум и на максимум
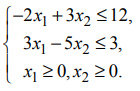
Задача 4. Среди чисел x и y, удовлетворяющих условиям

найти такие, при которых разность этих чисел y-x принимает наибольшее значение.
Задача 5. Решить графическим методом ЗЛП, заданную указанной математической моделью.
Задача 6. Решите графически следующие задачи линейного программирования
Задача 7. Решить графическим методом
Решаем задачи линейного программирования на заказ
