В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Модуль вектора ускорения
![]() .
.
(1.12)
Вектор ускорения
![]()
можно разложить на два вектора (рис.
1.6) .
Составляющая
ускорения, характеризующая изменение
мгновенной скорости по величине,
называется касательным
(тангенциальным) ускорением
![]() .
.
Составляющая
ускорения, направленная к центру кривизны
траектории и характеризующая изменение
вектора скорости по направлению,
называется нормальным
ускорением
![]() .
.
В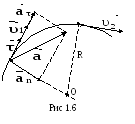 ектор
ектор
полного ускорения
![]() ,
,
(1.13)
а его модуль
![]() .
.
(1.14)
Для самостоятельного изучения
Модули касательного
и нормального ускорения находятся из
соотношения
![]() ,
,
(1.15)
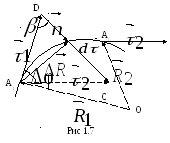
где
![]() единичный
единичный
вектор, направленный по касательной к
точке траектории в сторону движения в
сторону движения м.т. (рис 1.7), а![]() –
–
вектор мгновенной скорости
![]() .
.
Первое слагаемое
в (1.15) равно касательному ускорению,
![]()
 ,
,
![]()
![]()
второе – нормальному
![]()
![]() (1.16)
(1.16)
Вектор касательного
ускорения может совпадать с вектором
мгновенной скорости (![]() )
)
и может
быть ему антипараллелен (![]() ).
).
В первом случае движение будет ускоренным,
а во втором – замедленным.
Рассмотрим
перемещение материальной точки по
траектории из точки
![]() в точку
в точку![]() .
.
(рис 1.7) За малый интервал времени![]() единичный вектор в точке А2
единичный вектор в точке А2
равен
сумме
![]() ,
,
где
![]() – единичный вектор, определяющий
– единичный вектор, определяющий
направление движения в точке А1,
![]() – вектор
– вектор
изменения направления движения.
Треугольник
![]() ,
,
образованный векторами
![]()
и
![]() ,равнобедренный,
,равнобедренный,
т.к.
![]() =1.
=1.
При
![]() ,
,
угол
![]()
между векторами
![]()
и
![]() уменьшается
уменьшается
истремится
к нулю, а угол
![]() между векторами
между векторами
![]()
и
![]() увеличится до
увеличится до
![]() .
.
Следовательно,
вектора
![]() и
и![]()
направлены к центру кривизны траектории
и совпадает с вектором нормали
к скорости
![]()
(![]() ).
).
Модуль вектора
нормального ускорения определяется из
треугольников
![]()
![]()
и
![]() DC.
DC.
Эти
треугольники равнобедренные и подобные,
т.к. при
![]()
![]()
где
![]() –
–
радиус кривизны траектории. Из соотношения
сторон треугольников
![]() .
.
(1.17)
Для бесконечного
малого интервала времени
![]() ,
,
![]()
![]()
Вектор
![]()
можно представить в виде
![]() .Тогда
.Тогда
вектор нормального ускорения
![]() ,
,
![]() .
.
(1.18)
Задания
для самоконтроля знаний.
-
Дайте определение средней и мгновенной
скорости. -
Совпадают ли векторы средней и мгновенной
скорости материальной точки, движущейся
по окружности? -
Определите физический смысл понятий
скорости и ускорения движения материальной
точки. -
Запишите выражения для векторов скорости
и ускорения материальной точки в
декартовой системе координат. -
Определите модуль вектора скорости и
ускорения в декартовой системе координат. -
Дайте определение тангенциального,
нормального и полного ускорения. -
Определите модуль вектора ускорения
движения точки по окружности радиусом
R=1м, в момент времени t=2с от начала
движения, если зависимость модуля
вектора скорости от времени задается
уравнением
 .
.
Лекция 2
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- Равноускоренное прямолинейное движение — движение по прямой линии с постоянным ускорением (a=const).
- Ускорение — векторная физическая величина, показывающая изменение скорости тела за 1 с. Обозначается как a.
- Единица измерения ускорения — метр в секунду в квадрате (м/с2).
- Акселерометр — прибор для измерения ускорения.
Формула ускорения
Ускорение тела равно отношению изменения вектора скорости ко времени, в течение которого это изменение произошло:
v — скорость тела в данный момент времени, v0 — скорость тела в начальный момент времени, t — время, в течение которого изменялась скорость
Пример №1. Состав тронулся с места и через 20 секунд достиг скорости 36 км/ч. Найти ускорение его разгона.
Сначала согласуем единицы измерения. Для этого переведем скорость в м/с: умножим километры на 1000 и поделим на 3600 (столько секунд содержится в 1 часе). Получим 10 м/с.
Начальная скорость состава равно 0 м/с, так как изначально он стоял на месте. Имея все данные, можем подставить их в формулу и найти ускорение:
Проекция ускорения
Проекция ускорения на ось ОХ
vx — проекция скорости тела в данный момент времени, v0x — проекция скорости в начальный момент времени, t — время, в течение которого изменялась скорость
Знак проекции ускорения зависит от того, в какую сторону направлен вектор ускорения относительно оси ОХ:
- Если вектор ускорения направлен в сторону оси ОХ, то его проекция положительна.
- Если вектор ускорения направлен в сторону, противоположную направлению оси ОХ, его проекция отрицательная.
При решении задач на тему равноускоренного прямолинейного движения проекции величин можно записывать без нижнего индекса, так как при движении по прямой тело изменяет положение относительно только одной оси (ОХ). Их обязательно нужно записывать, когда движение описывается относительно двух и более осей.
Направление вектора ускорения
Направление вектора ускорения не всегда совпадает с направлением вектора скорости!
Равноускоренным движением называют такое движение, при котором скорость за одинаковые промежутки времени изменяется на одну и ту же величину. При этом направления векторов скорости и ускорения тела совпадают (а↑↑v).
Равнозамедленное движение — частный случай равноускоренного движения, при котором скорость за одинаковые промежутки времени уменьшается на одну и ту же величину. При этом направления векторов скорости и ускорения тела противоположны друг другу (а↑↓v).
Пример №2. Автомобиль сначала разогнался, а затем затормозил. Во время разгона направления векторов его скорости и ускорения совпадают, так как скорость увеличивается. Но при торможении скорость уменьшается, потому что вектор ускорения изменил свое направление в противоположную сторону.

График ускорения
График ускорения — график зависимости проекции ускорения от времени. Проекция ускорения при равноускоренном прямолинейном движении не изменяется (ax=const). Графиком ускорения при равноускоренном прямолинейном движении является прямая линия, параллельная оси времени.
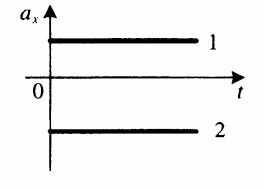
Зависимость положения графика проекции ускорения относительно оси ОХ от направления вектора ускорения:
- Если график лежит выше оси времени, движение равноускоренное (направление вектора ускорения совпадает с направлением оси ОХ). На рисунке выше тело 1 движется равноускорено.
- Если график лежит ниже оси времени, движение равнозамедленное (вектор ускорения направлен противоположно оси ОХ). На рисунке выше тело 2 движется равнозамедлено.
Если график ускорения лежит на оси времени, движение равномерное, так как ускорение равно 0. Скорость в этом случае — величина постоянная.
Чтобы сравнить модули ускорений по графикам, нужно сравнить степень их удаленности от оси времени независимо от того, лежат они выше или ниже нее. Чем дальше от оси находится график, тем больше его модуль. На рисунке график 2 находится дальше от оси времени по сравнению с графиком один. Поэтому модуль ускорения тела 2 больше модуля ускорения тела 1.
Пример №3. По графику проекции ускорения найти участок, на котором тело двигалось равноускорено. Определить ускорение в момент времени t1 = 1 и t2 = 3 с.
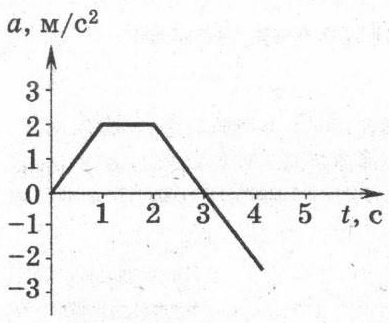
В промежуток времени от 0 до 1 секунды график ускорения рос, с 1 до 2 секунд — не менялся, а с 2 до 4 секунд — опускался. Так как при равноускоренном движении ускорение должно оставаться постоянным, ему соответствует второй участок (с 1 по 2 секунду).
Чтобы найти ускорение в момент времени t, нужно мысленно провести перпендикулярную прямую через точку, соответствующую времени t. От точки пересечения с графиком нужно мысленно провести перпендикуляр к оси проекции ускорения. Значение точки, в которой пересечется перпендикуляр с этой осью, покажет ускорение в момент времени t.
В момент времени t1 = 1с ускорение a = 2 м/с2. В момент времени t2 = 3 ускорение a = 0 м/с2.
Задание EF18774
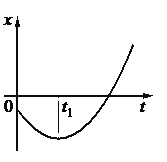
На рисунке показан график зависимости координаты x тела, движущегося вдоль оси Ох, от времени t (парабола). Графики А и Б представляют собой зависимости физических величин, характеризующих движение этого тела, от времени t. Установите соответствие между графиками и физическими величинами, зависимости которых от времени эти графики могут представлять.
К каждой позиции графика подберите соответствующую позицию утверждения и запишите в поле цифры в порядке АБ.
Алгоритм решения
- Определить, какому типу движения соответствует график зависимости координаты тела от времени.
- Определить величины, которые характеризуют такое движение.
- Определить характер изменения величин, характеризующих это движение.
- Установить соответствие между графиками А и Б и величинами, характеризующими движение.
Решение
График зависимости координаты тела от времени имеет вид параболы в случае, когда это тело движется равноускоренно. Так как движение тела описывается относительно оси Ох, траекторией является прямая. Равноускоренное прямолинейное движение характеризуется следующими величинами:
- перемещение и путь;
- скорость;
- ускорение.
Перемещение и путь при равноускоренном прямолинейном движении изменяются так же, как координата тела. Поэтому графики их зависимости от времени тоже имеют вид параболы.
График зависимости скорости от времени при равноускоренном прямолинейном движении имеет вид прямой, которая не может быть параллельной оси времени.
График зависимости ускорения от времени при таком движении имеет вид прямой, перпендикулярной оси ускорения и параллельной оси времени, так как ускорение в этом случае — величина постоянная.
Исходя из этого, ответ «3» можно исключить. Остается проверить ответ «1». Кинетическая энергия равна половине произведения массы тела на квадрат его скорости. Графиком квадратичной функции является парабола. Поэтому ответ «1» тоже не подходит.
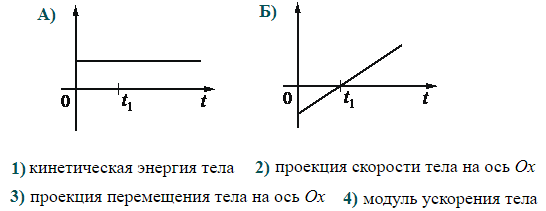
График А — прямая линия, параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости ускорения от времени (или его модуля). Поэтому первая цифра ответа — «4».
График Б — прямая линия, не параллельная оси времени. Мы установили, что такому графику может соответствовать график зависимости скорости от времени (или ее проекции). Поэтому вторая цифра ответа — «2».
Ответ: 24
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17992
Начальная скорость автомобиля, движущегося прямолинейно и равноускоренно, равна 5 м/с. После прохождения расстояния 40 м его скорость оказалась равной 15 м/c. Чему равно ускорение автомобиля?
Алгоритм решения
- Записать исходные данные.
- Записать формулу, связывающую известные из условия задачи величины.
- Выразить из формулы искомую величину.
- Вычислить искомую величину, подставив в формулу исходные данные.
Решение
Запишем исходные данные:
- Начальная скорость v0 = 5 м/с.
- Конечная скорость v = 15 м/с.
- Пройденный путь s = 40 м.
Формула, которая связывает ускорение тела с пройденным путем:
Так как скорость растет, ускорение положительное, поэтому перед ним в формуле поставим знак «+».
Выразим из формулы ускорение:
Подставим известные данные и вычислим ускорение автомобиля:
Ответ: 2,5
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18202
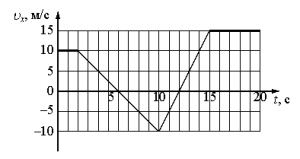
Внимательно прочитайте текст задания и выберите верный ответ из списка. На рисунке приведён график зависимости проекции скорости тела vx от времени.
Какой из указанных ниже графиков совпадает с графиком зависимости от времени проекции ускорения этого тела ax в интервале времени от 6 с до 10 с?

Алгоритм решения
- Охарактеризовать движение тела на участке графика, обозначенном в условии задачи.
- Вычислить ускорение движение тела на этом участке.
- Выбрать график, который соответствует графику зависимости от времени проекции ускорения тела.
Решение
Согласно графику проекции скорости в интервале времени от 6 с до 10 с тело двигалось равнозамедленно. Это значит, что проекция ускорения на ось ОХ отрицательная. Поэтому ее график должен лежать ниже оси времени, и варианты «а» и «в» заведомо неверны.
Чтобы выбрать между вариантами «б» и «г», нужно вычислить ускорение тела. Для этого возьмем координаты начальной и конечной точек рассматриваемого участка:
- t1 = 6 с. Этой точке соответствует скорость v1 = 0 м/с.
- t2 = 10 с. Этой точке соответствует скорость v2 = –10 м/с.
Используем для вычислений следующую формулу:
Подставим в нее известные данные и сделаем вычисления:
Этому значению соответствует график «г».
Ответ: г
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18027
На графике приведена зависимость проекции скорости тела от времени при прямолинейном движении по оси х. Определите модуль ускорения тела.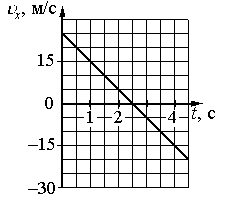
Алгоритм решения
- Записать формулу ускорения.
- Записать формулу для вычисления модуля ускорения.
- Выбрать любые 2 точки графика.
- Определить для этих точек значения времени и проекции скорости (получить исходные данные).
- Подставить данные формулу и вычислить ускорение.
Решение
Записываем формулу ускорения:
По условию задачи нужно найти модуль ускорения, поэтому формула примет следующий вид:
Выбираем любые 2 точки графика. Пусть это будут:
- t1 = 1 с. Этой точке соответствует скорость v1 = 15 м/с.
- t2 = 2 с. Этой точке соответствует скорость v2 = 5 м/с.
Подставляем данные формулу и вычисляем модуль ускорения:
Ответ: 10
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 13.7k

Рис. 1.69.
Так как по условию движение равномерное, то длина дуги  и
и

Для того чтобы увидеть,  происходит при повороте вектора скорости, перенесем векторы
происходит при повороте вектора скорости, перенесем векторы  параллельно самим себе 8 точку А и построим треугольник, показанный на рис. 1.69. Из этого треугольника видно, что для поворота вектора скорости за время
параллельно самим себе 8 точку А и построим треугольник, показанный на рис. 1.69. Из этого треугольника видно, что для поворота вектора скорости за время  оказывается необходимым к вектору
оказывается необходимым к вектору  добавить некоторый дополнительный вектор
добавить некоторый дополнительный вектор  Этот добавочный вектор приращения скорости
Этот добавочный вектор приращения скорости  направлен противоположно радиус-вектору
направлен противоположно радиус-вектору  и одновременно перпендикулярен вектору скорости
и одновременно перпендикулярен вектору скорости  которую тело имело в точке А. Следовательно, можно сделать такой вывод: для поворота вектора скорости на малый угол к нему нужно добавить вектор, перпендикулярный к самому вектору скорости и направленный в сторону вогнутости траектории.
которую тело имело в точке А. Следовательно, можно сделать такой вывод: для поворота вектора скорости на малый угол к нему нужно добавить вектор, перпендикулярный к самому вектору скорости и направленный в сторону вогнутости траектории.
Найдем модуль вектора  Если угол
Если угол  достаточно мал, то его значение в радианах (см. рис. 1.69) определяется следующим образом:
достаточно мал, то его значение в радианах (см. рис. 1.69) определяется следующим образом:

Сравним это выражение с ранее полученным:

Приравняв правые части этих двух выражений, получаем

Таким образом, мы нашли модуль вектора приращения скорости  который нужно добавлять к вектору скорости
который нужно добавлять к вектору скорости  для изменения его направления.
для изменения его направления.
Мы убедились, что для изменения направления вектора скорости  необходимо добавлять к нему вектор
необходимо добавлять к нему вектор  Этот вектор приращения скорости
Этот вектор приращения скорости  должен быть перпендикулярен самому вектору скорости
должен быть перпендикулярен самому вектору скорости
V и должен иметь модуль 
Будет правильным, если мы за количественное выражение нормального ускорения  показывающего, как быстро меняется
показывающего, как быстро меняется

Рис. 1.70.

Рис. 1.71.
направление скорости в точке А, примем отношение приращения  ко времени
ко времени 

Итак: модуль вектора нормального ускорения прямо пропорционален квадрату скорости и обратно пропорционален радиусу окружности.
Из проведенных рассуждений видно, что нормальное ускорение — вектор, направленный перпендикулярно вектору скорости в сторону вогнутости траектории (рис. 1.70).
Нетрудно увидеть, что полученные нами выражения для нормального ускорения справедливы не только для движений по окружности, но и для движений по любым криволинейным траекториям. Действительно, для любой кривой линии мы всегда можем построить окружности, соприкасающиеся с этой кривой в любой нужной нам точке (рис. 1.71). Тогда при расчете нормального ускорения мы можем заменить дугу траектории А В соответствующей дугой соприкасающейся окружности, повторить все расчеты и получить то же самое выражение для 
Еще раз подчеркнем, что оба ускорения, тангенциальное и нормальное, по своей физической природе одинаковы. Оба они выражаются через отношения приращений скорости к приращению времени. Только они выполняют разные служебные обязанности: тангенциальное ускорение изменяет модуль скорости, а нормальное ускорение изменяет ее направление. Одинаковость физической природы означает, что оба ускорения могут вызываться только одинаковыми причинами.
Итак, мы нашли выражения для тангенциального и нормального ускорений, справедливые для движений по любым траекториям, доказали, что они являются векторами.

Рис. 1.72.
Этим самым мы доказали, что и полное ускорение — тоже вектор, потому что оно представляет собой сумму 

Допустим, например, что тело движется равноускоренно по окружности радиуса  Тангенциальное ускорение будет постоянно, направлено по касательной и равно
Тангенциальное ускорение будет постоянно, направлено по касательной и равно  Нормальное ускорение направлено к центру окружности и равно
Нормальное ускорение направлено к центру окружности и равно  Полное ускорение будет вектором, равным сумме векторов
Полное ускорение будет вектором, равным сумме векторов  направленным под углом а к радиусу. Модуль полного ускорения можно найти по теореме Пифагора:
направленным под углом а к радиусу. Модуль полного ускорения можно найти по теореме Пифагора:

Угол а, который полное ускорение а составляет с радиус-вектором  движущейся точки, будет определяться уравнением
движущейся точки, будет определяться уравнением

Равноускоренное движение
Равноускоренное движение – это движение, при котором вектор ускорения не меняется по модулю и направлению (в случае равнозамедленного движения модуль скорости равномерно меняется). Примеры такого движения: велосипед, который катится с горки; камень брошенный под углом к горизонту. Равномерное движение, в отличие от неравномерного, – частный случай ускоренного в равной степени движения с ускорением, равным нулю.
Рассмотрим случай свободного падения (тело брошено под углом к горизонту) более подробно с вычислением. Такое движение можно рассчитать и представить в виде суммы движений относительно вертикальной и горизонтальной осей.
Как найти ускорение в физике? Нахождение ускорения в физике происходит с учетом того, что в любой точке траектории на тело действует ускорение свободного падения g→, которое не меняется по величине и всегда направлено в одну сторону.

Вдоль оси X движение равномерное и прямолинейное, а вдоль оси Y – движение равноускоренное и прямолинейное. Будем рассматривать определенные проекции векторов скорости и ускорения на оси.
Формулы для равноускоренного движения
Формула для скорости (формула ускорения) при равноускоренном движении:
v=v0+at.
Здесь v0 – начальная скорость тела, a=const – ускорение.
Покажем на графике, что при равноускоренном движении зависимость v(t) имеет вид прямой линии. Вот небольшой тест.

Как найти ускорение? Ускорение можно определить по углу наклона графика скорости. На рисунке выше модуль ускорения равен отношению сторон треугольника ABC. Вот как выглядит формула ускорения в физике.
a=v-v0t=BCAC
Чем больше угол β, тем больше наклон (крутизна) графика по отношению к оси времени. Соответственно, тем больше ускорение тела.
Для первого графика: v0=-2 мс; a=0,5 мс2.
Для второго графика: v0=3 мс; a=-13 мс2.
По данному графику физик может также вычислить (произвести определение) перемещение тела за время t. Как это сделать?
Выделим на графике малый отрезок времени ∆t. Будем считать, что он настолько мал, что движение за время ∆t можно считать равномерным движением со скоростью, равной скорости тела в середине промежутка ∆t. Тогда, перемещение ∆s за время ∆t будет равно ∆s=v∆t.
Разобьем все время t на бесконечно малые промежутки ∆t. Перемещение s за время t равно площади трапеции ODEF.
s=OD+EF2OF=v0+v2t=2v0+(v-v0)2t.
Мы знаем, что v-v0=at, поэтому окончательная формула или расчет для перемещения тела примет вид:
s=v0t+at22
Для того чтобы найти координату тела в данный момент времени, нужно к начальной координате тела добавить перемещение (расстояние). Изменение координаты в зависимости от времени выражает закон равноускоренного движения.
Какова будет формула пути при равноускоренном движении? В этом случае путь изменяется согласно квадратной зависимости: 8=v0t + at²/2.
Закон равноускоренного движения
y=y0+v0t+at22.
Еще одна распространенная задача кинематики, которая возникает при анализе равноускоренного движения – находить координаты при заданных значениях начальной и конечной скоростей и ускорения.
Исключая из записанных выше уравнений t и решая их, получаем:
s=v2-v022a.
По известным начальной скорости, ускорению и перемещению может находиться конечная скорость тела:
v=v02+2as.
При v0=0 s=v22a и v=2as
Величины v, v0, a, y0, s, входящие в выражения, являются алгебраическими величинами. Они могут принимать как положительные, так и отрицательные значения – это будет зависеть от характера движения и направления координатных осей в условиях конкретной задачи.
