|
Как найти модуль перемещения тела (формула)?
Общая формула для всех видов движения по которой можно найти модуль перемещения выглядит так. s = x-x0, где х0 – начальная координата, х – координата через промежуток времени, за которое совершено перемещение. Для более простых видов перемещения есть частные формулы. Для равномерного прямолинейного движения x = x0 + vt, где м – скорость тела. Для равноускоренного прямолинейного движения x = x0 + v0t + (a t^2)/2. система выбрала этот ответ лучшим
Zolotynka 6 месяцев назад Прежде чем писать/запоминать формулу, давайте разберемся, что представляет собой само понятие перемещения тела – это разница между двумя положениями объекта. Далее: это векторная величина, потому что у нее также есть направление – от начальной позиции к финальной. Формула перемещения выглядит следующим образом: Sx = x – x0. __ Перемещение не обязательно всегда положительно, оно также может быть нулевым или отрицательным. Знаете ответ? |



Скорость равномерного прямолинейного движения прямо пропорциональна перемещению тела и обратно пропорциональна значению времени этого перемещения.
v→=s→t.
Можно выразить перемещение из этой формулы, умножив обе части на значение времени: s→=v→⋅t.
О направлении векторов этих величин относительно друг друга можно судить, в частности, по уравнениям, записанным в векторной форме.
Проекция перемещения на ось (OX) рассчитывается по формуле
sx=vxt
, где (upsilon_x) — проекция скорости на ось (OX) принимает положительное значение, если направление перемещения совпадает с направлением оси (OX); принимает отрицательное значение, если перемещение противоположно направлено относительно оси (OX).
Если при решении задач направление движения не влияет на смысл условия и ход решения задачи, то направление векторных величин можно не учитывать. Тогда говорят о модулях величин, то есть их размере без учёта направления: (|vec{s}|=|vec{upsilon}|cdot t) можно заменить на s=vt.
При прямолинейном равномерном движении модуль перемещения равен пройденному пути: (|vec{s}|=s), если направление скорости совпадает с направлением вектора перемещения.
На рисунке представлена зависимость (v(t)) для равномерного движения.

Формула для расчета модуля перемещения: s=v1⋅t1.
Однако произведение v1⋅t1, т.е. скорости на промежуток времени, численно равно площади (S) закрашенной фигуры (в данном случае прямоугольника).
Это наблюдение позволяет сделать вывод; что при прямолинейном равномерном движении модуль перемещения численно равен площади прямоугольника, которые образуется между графиком скорости и осью времени. При этом необходимо учитывать моменты времени: начало наблюдения за объектом и конец наблюдения. В данном случае начало наблюдения соответствует точке (O,) а конец наблюдения — точке t1.
Можно говорить о равенстве пройденного пути и площади под графиком скорости.
Движение по окружности: формулы и расчеты
Перемещение тел по окружности достаточно распространено в нашей жизни и в природе. Яркими примерами этого типа перемещения являются вращения ветровых мельниц, планет вокруг своих звезд и колес транспортных средств. В данной статье рассмотрим, какими формулами движение по окружности тел описывается.
Перемещение по окружности и по прямой линии в физике

В физике вопросами движения занимается кинематика. Она устанавливает связь между величинами, описывающими этот процесс. В динамике также уделяется внимание движению, однако она ориентирована на описание причин его возникновения. Другими словами, если для кинематики главными физическими величинами являются путь и скорость, то для динамики – это действующие на тела силы.
 Вам будет интересно: Интерес: определение, понятие, типы и функции
Вам будет интересно: Интерес: определение, понятие, типы и функции
В физике принято выделять два идеальных типа траекторий движения:
Математический аппарат для описания движения по обоим типам траекторий развит настолько хорошо, что понимание формул, например для прямолинейного движения, автоматически приводит к пониманию выражений для движения по окружности. Единственная принципиальная разница между формулами указанных типов перемещения заключается в том, что для движения по окружности удобно использовать угловые характеристики, а не линейные.
 Вам будет интересно: Педагогическая система Макаренко: принципы и компоненты
Вам будет интересно: Педагогическая система Макаренко: принципы и компоненты
Далее в статье будем рассматривать исключительно кинематические формулы движения по окружности тел, не вдаваясь в подробности динамики.
Угловые характеристики движения: угол поворота
Прежде чем записывать формулы движения по окружности в физике, следует ввести величины, которые будут фигурировать в этих формулах.
Начнем с угла поворота. Будем обозначать его греческой буквой θ (тета). Поскольку вращение предполагает движение точки вдоль одной и той же окружности, то значение угла поворота θ за определенный промежуток времени можно использовать для определения количества оборотов, которое сделала эта точка. Напомним, что вся окружность равна 2*pi радиан, или 360o. Тогда формула для числа оборотов n через угол θ примет вид:
 Вам будет интересно: Академик Рыбаков Б.А.: биография, археологическая деятельность, книги
Вам будет интересно: Академик Рыбаков Б.А.: биография, археологическая деятельность, книги
Здесь и далее во всех формулах угол выражается в радианах.
Пользуясь известным углом θ, также можно определить линейное расстояние, которое точка прошла вдоль окружности. Это расстояние будет равно:
Здесь r – радиус рассматриваемой окружности.
Угловая скорость и ускорение

Кинематические формулы движения по окружности точки предполагают также использование понятий угловой скорости и углового ускорения. Обозначим первую буквой ω (омега), а вторую буквой α (альфа).
Физический смысл угловой скорости ω прост: эта величина показывает, на какой угол в радианах поворачивается точка за каждую секунду времени. Данное определение имеет следующее математическое представление:
Эта формула скорости движения по окружности записана в дифференциальной форме. Полученная с ее помощью величина ω называется мгновенной скоростью. Ее удобно использовать, если движение не является равномерным, то есть происходит с переменной скоростью.
Угловое ускорение α – это величина, которая описывает быстроту изменения скорости ω, то есть:
Угловое ускорение измеряется в радианах в секунду квадратную (рад/с2). Так, 1 рад/с2 означает, что тело увеличивает за каждую секунду времени скорость на 1 рад/с.
Учитывая выражение для ω, записанное выше, равенство можно представить в такой форме:
В зависимости от особенностей движения по окружности величина α может быть постоянной, переменной или нулевой.
Равномерное движение
Когда на вращающееся тело не действует никакая внешняя сила, то угловая скорость будет оставаться постоянной сколь угодно длительное время. Такое движение получило название равномерного вращения. Оно описывается следующей формулой:
В этом выражении переменными являются всего две величины: t и θ. Скорость ω = const.
Следует отметить один важный момент: нулю равна лишь равнодействующая внешних сил на тело, внутренние же силы, действующие в системе, нулю не равны. Так, внутренняя сила заставляет вращающееся тело изменять свою прямолинейную траекторию на криволинейную (окружность). Эта сила приводит к появлению центростремительного ускорения. Последнее не изменяет ни скорость ω, ни линейную скорость v, оно лишь изменяет направление движения.
Равноускоренное движение по окружности
Формулы для этого типа перемещения можно получить непосредственно из приведенных математических выражений для величин ω и α. Равноускоренное движение предполагает, что за более-менее длительный промежуток времени модуль и направление ускорения α не изменяются. Благодаря этому можно проинтегрировать дифференциальное выражение для α и получить следующие две формулы:
Очевидно, что в первом случае движение будет равноускоренным, во втором – равнозамедленным. Величина ω0 здесь – это некоторая начальная скорость, которой вращающееся тело обладало до появления ускорения.
Для равноускоренного движения не существует конечной скорости, поскольку она может возрастать сколь угодно долго. Для равнозамедленного движения конечным состоянием будет прекращение вращения, то есть ω = 0.
Теперь запишем формулы для определения угла θ при движении с постоянным ускорением. Эти формулы получаются, если произвести двойное интегрирование по времени для выражения α через θ. Получаются следующие выражения:
То есть центральный угол θ, на который тело повернется за время t, будет равен сумме двух слагаемых. Первое слагаемое – это вклад в θ равномерного движения, второе – равноускоренного (равнозамедленного).
Связь между угловыми и линейными величинами
При рассмотрении понятия угла поворота θ уже была приведена формула, которая его связывает с линейным расстоянием L. Здесь же рассмотрим аналогичные выражения для скорости ω и ускорения α.
Линейная скорость v при равномерном движении определяется как расстояние L, пройденное за время t, то есть:
Подставляя сюда выражение для L через θ, получаем:
Мы получили связь между линейной и угловой скоростью. Важно отметить, что удобство использования угловой скорости связано с тем, что она не зависит от радиуса окружности. В свою очередь, линейная скорость v возрастает линейно с увеличением r.
Остается записать связь между линейным ускорением a и его угловым аналогом α. Чтобы это сделать, запишем выражение для скорости v при равноускоренном движении без начальной скорости v0. Получаем:
Подставляем сюда полученное выражение связи между v и ω:
Как и скорость, линейное ускорение, направленное по касательной к окружности, зависит от радиуса.
Ускорение центростремительное
Выше уже было сказано несколько слов об этой величине. Здесь приведем формулы, которые можно использовать для ее вычисления. Через скорость v выражение для центростремительного ускорения ac имеет вид:
Через угловую скорость его можно записать так:
Величина ac не имеет никакого отношения к тангенциальному ускорению a. Центростремительное ускорение обеспечивает поддержание вращающегося тела на одной окружности.
Задача на определение угловой скорости вращения планеты
Известно, что ближе всего к солнцу находится Меркурий. Полагая, что он вращается по окружности вокруг светила, мы можем определить его угловую скорость ω.
Для решения задачи следует обратиться к справочным данным. Из них известно, что планета делает полный оборот вокруг светила за 87 дней 23,23 часа земных. Это время называется периодом обращения. Учитывая, что движение происходит с постоянной угловой скоростью, запишем рабочую формулу:
Остается перевести время в секунды, подставить значение угла θ, соответствующее полному обороту (2*pi), и записать ответ: ω = 8,26*10-7 рад/c.
I. Механика
Тестирование онлайн
Так как линейная скорость равномерно меняет направление, то движение по окружности нельзя назвать равномерным, оно является равноускоренным.
Угловая скорость
Выберем на окружности точку 1. Построим радиус. За единицу времени точка переместится в пункт 2. При этом радиус описывает угол. Угловая скорость численно равна углу поворота радиуса за единицу времени.
Период и частота
Период вращения T – это время, за которое тело совершает один оборот.
Частота вращение – это количество оборотов за одну секунду.
Частота и период взаимосвязаны соотношением
Связь с угловой скоростью
Линейная скорость
Каждая точка на окружности движется с некоторой скоростью. Эту скорость называют линейной. Направление вектора линейной скорости всегда совпадает с касательной к окружности. Например, искры из-под точильного станка двигаются, повторяя направление мгновенной скорости.
Рассмотрим точку на окружности, которая совершает один оборот, время, которое затрачено – это есть период T. Путь, который преодолевает точка – это есть длина окружности.
Центростремительное ускорение
При движении по окружности вектор ускорения всегда перпендикулярен вектору скорости, направлен в центр окружности.
Используя предыдущие формулы, можно вывести следующие соотношения
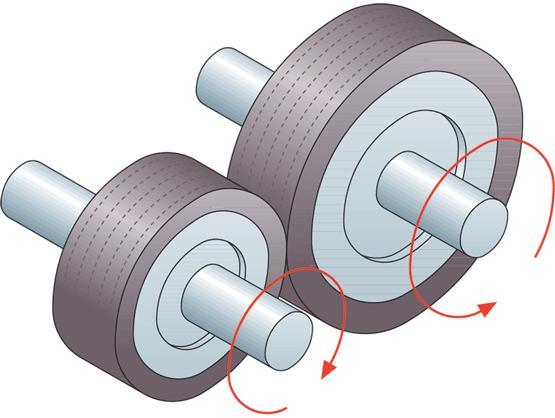
Точки, лежащие на одной прямой исходящей из центра окружности (например, это могут быть точки, которые лежат на спице колеса), будут иметь одинаковые угловые скорости, период и частоту. То есть они будут вращаться одинаково, но с разными линейными скоростями. Чем дальше точка от центра, тем быстрей она будет двигаться.
Закон сложения скоростей справедлив и для вращательного движения. Если движение тела или системы отсчета не является равномерным, то закон применяется для мгновенных скоростей. Например, скорость человека, идущего по краю вращающейся карусели, равна векторной сумме линейной скорости вращения края карусели и скорости движения человека.
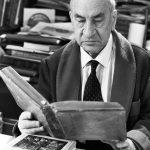
Вращение Земли
Земля участвует в двух основных вращательных движениях: суточном (вокруг своей оси) и орбитальном (вокруг Солнца). Период вращения Земли вокруг Солнца составляет 1 год или 365 суток. Вокруг своей оси Земля вращается с запада на восток, период этого вращения составляет 1 сутки или 24 часа. Широтой называется угол между плоскостью экватора и направлением из центра Земли на точку ее поверхности.
Связь со вторым законом Ньютона
Согласно второму закону Ньютона причиной любого ускорения является сила. Если движущееся тело испытывает центростремительное ускорение, то природа сил, действием которых вызвано это ускорение, может быть различной. Например, если тело движется по окружности на привязанной к нему веревке, то действующей силой является сила упругости.
Если тело, лежащее на диске, вращается вместе с диском вокруг его оси, то такой силой является сила трения. Если сила прекратит свое действие, то далее тело будет двигаться по прямой
Как вывести формулу центростремительного ускорения
Рассмотрим перемещение точки на окружности из А в В. Линейная скорость равна vA и vB соответственно. Ускорение – изменение скорости за единицу времени. Найдем разницу векторов.
Разница векторов есть . Так как , получим
Движение по циклоиде*
В системе отсчета, связанной с колесом, точка равномерно вращается по окружности радиуса R со скоростью , которая изменяется только по направлению. Центростремительное ускорение точки направлено по радиусу к центру окружности.
Теперь перейдем в неподвижную систему, связанную с землей. Полное ускорение точки А останется прежним и по модулю, и по направлению, так как при переходе от одной инерциальной системы отсчета к другой ускорение не меняется. С точки зрения неподвижного наблюдателя траектория точки А — уже не окружность, а более сложная кривая (циклоида), вдоль которой точка движется неравномерно.
Мгновенная скорость определяется по формуле
Движение по окружности
Движение по окружности – простейший случай криволинейного движения тела. Когда тело движется вокруг некоторой точки, наряду с вектором перемещения удобно ввести угловое перемещение ∆ φ (угол поворота относительно центра окружности), измеряемое в радианах.
Зная угловое перемещение, можно вычислить длину дуги окружности (путь), которую прошло тело.
Если угол поворота мал, то ∆ l ≈ ∆ s .
Угловая скорость
При криволинейном движении вводится понятие угловой скорости ω , то есть скорости изменения угла поворота.
Определение. Угловая скорость
Угловая скорость в данной точке траектории – предел отношения углового перемещения ∆ φ к промежутку времени ∆ t , за которое оно произошло. ∆ t → 0 .
ω = ∆ φ ∆ t , ∆ t → 0 .
Единица измерения угловой скорости – радиан в секунду ( р а д с ).
Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой скорости:
Нормальное ускорение
При равномерном движении по окружности, скорости v и ω остаются неизменными. Меняется только направление вектора линейной скорости.
При этом равномерное движение по окружности на тело действует центростремительное, или нормальное ускорение, направленное по радиусу окружности к ее центру.
a n = ∆ v → ∆ t , ∆ t → 0
Модуль центростремительного ускорения можно вычислить по формуле:
a n = v 2 R = ω 2 R
Докажем эти соотношения.
Рассмотрим, как изменяется вектор v → за малый промежуток времени ∆ t . ∆ v → = v B → – v A → .
В точках А и В вектор скорости направлен по касательной к окружности, при этом модули скоростей в обеих точках одинаковы.
По определению ускорения:
a → = ∆ v → ∆ t , ∆ t → 0
Взглянем на рисунок:
Треугольники OAB и BCD подобны. Из этого следует, что O A A B = B C C D .
Если значение угла ∆ φ мало, расстояние A B = ∆ s ≈ v · ∆ t . Принимая во внимание, что O A = R и C D = ∆ v для рассмотренных выше подобных треугольников получим:
R v ∆ t = v ∆ v или ∆ v ∆ t = v 2 R
При ∆ φ → 0 , направление вектора ∆ v → = v B → – v A → приближается к направлению на центр окружности. Принимая, что ∆ t → 0 , получаем:
a → = a n → = ∆ v → ∆ t ; ∆ t → 0 ; a n → = v 2 R .
При равномерном движении по окружности модуль ускорения остается постоянным, а направление вектора изменяется со временем, сохраняя ориентацию на центр окружности. Именно поэтому это ускорение называется центростремительным: вектор в любой момент времени направлен к центру окружности.
Запись центростремительного ускорения в векторной форме выглядит следующим образом:
Здесь R → – радиус вектор точки на окружности с началом в ее центре.
Тангенциальное ускорение
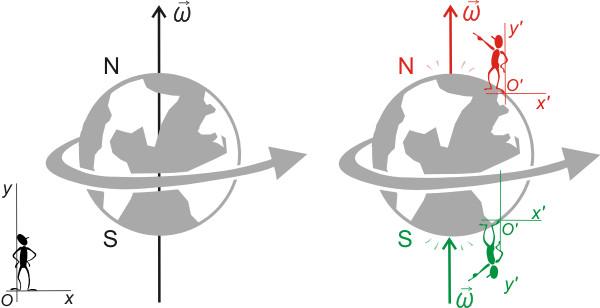
В общем случае ускорение при движении по окружности состоит из двух компонентов – нормальное, и тангенциальное.
Рассмотрим случай, когда тело движется по окружности неравномерно. Введем понятие тангенциального (касательного) ускорения. Его направление совпадает с направлением линейной скорости тела и в каждой точке окружности направлено по касательной к ней.
a τ = ∆ v τ ∆ t ; ∆ t → 0
Здесь ∆ v τ = v 2 – v 1 – изменение модуля скорости за промежуток ∆ t
Направление полного ускорения определяется векторной суммой нормального и тангенциального ускорений.
Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый момент времени скорость тела можно разложить на составляющие v x и v y .
Если движение равномерное, величины v x и v y а также соответствующие координаты будут изменяться во времени по гармоническому закону с периодом T = 2 π R v = 2 π ω
[spoiler title=”источники:”]
http://fizmat.by/kursy/kinematika/okruzhnost
http://zaochnik.com/spravochnik/fizika/kinematika/dvizhenie-po-okruzhnosti/
[/spoiler]
Как найти модуль вектора перемещения
В кинематике для нахождения различных величин используются математические методы. В частности, чтобы найти модуль вектора перемещения, нужно применить формулу из векторной алгебры. В ней фигурируют координаты точек начала и конца вектора, т.е. первоначального и итогового положения тела.

Инструкция
Во время движения материальное тело меняет свое положение в пространстве. Его траектория может быть прямой линией или произвольной, ее длина составляет путь тела, но не расстояние, на которое оно переместилось. Эти две величины совпадают только в случае прямолинейного движения.
Итак, пусть тело совершило некоторое перемещение из точки А (х0, у0) в точку В (х, у). Чтобы найти модуль вектора перемещения, нужно вычислить длину вектора АВ. Начертите координатные оси и нанесите на них известные точки начального и конечного положения тела А и В.
Проведите отрезок из точки А в точку В, укажите направление. Опустите проекции его концов на оси и нанесите на графике параллельные и равные им отрезки, проходящие через рассматриваемые точки. Вы увидите, что на рисунке обозначился прямоугольный треугольник с катетами-проекциями и гипотенузой-перемещением.
По теореме Пифагора найдите длину гипотенузы. Этот метод широко применяется в векторной алгебре и носит название правила треугольника. Для начала запишите длины катетов, они равны разностям между соответствующими абсциссами и ординатами точек А и В:
ABx = x – x0 – проекция вектора на ось Ох;
ABy = y – y0 – его проекция на ось Оу.
Определите перемещение |AB|:
|AB| = √(ABx² + ABy²) = ((x – x0)² + (y – y0)²).
Для трехмерного пространства добавьте в формулу третью координату – аппликату z:
|AB| = √(ABx² + ABy² + ABz²) = ((x – x0)² + (y – y0)² + (z – z0)²).
Полученную формулу можно применять для любой траектории и типа движения. При этом величина перемещения обладает важным свойством. Она всегда меньше либо равна длине пути, в общем случае ее линия не совпадает с кривой траектории. Проекции – величины математические, могут быть как больше, так и меньше нуля. Однако это не имеет значения, поскольку в расчете они участвуют в четной степени.
Источники:
- модуль перемещения
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
Как найти модуль вектора перемещения
Содержание
- Вектор перемещения
- Правило сложения векторов
- Проекции вектора перемещения
- Физика А.В. Перышкин
Скорость (v) — физическая величина, численно равна пути (s), пройденного телом за единицу времени (t).

Путь (S) — длина траектории, по которой двигалось тело, численно равен произведению скорости (v) тела на время (t) движения.

Время движения (t) равно отношению пути (S), пройденного телом, к скорости (v) движения.

Средняя скорость (vср) равна отношению суммы участков пути (s1 s2, s3, . ), пройденного телом, к промежутку времени (t1+ t2+ t3+ . ), за который этот путь пройден.

Средняя скорость — это отношение длины пути, пройденного телом, ко времени, за которое этот путь был пройден.
Средняя скорость при неравномерном движении по прямой:  это отношение всего пути ко всему времени.
это отношение всего пути ко всему времени.
Два последовательных этапа с разными скоростями:  где
где 
При решении задач — сколько этапов движения столько будет составляющих: 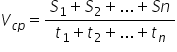
Проекция вектора перемещения на ось ОХ:

Проекция вектора перемещения на ось OY:

Проекция вектора на ось равна нулю, если вектор перпендикулярен оси.
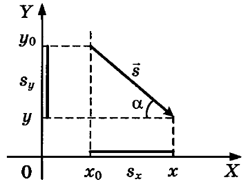
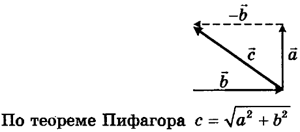
Знаки проекций перемещения: проекцию считают положительной, если движение от проекции начала вектора к проекции конца происходит по направлению оси, и отрицательной, если против оси. В данном примере 
Модуль перемещения — это длина вектора перемещения:

По теореме Пифагора:

Проекции перемещения и угол наклона

В данном примере:

Уравнение координаты (в общем виде):


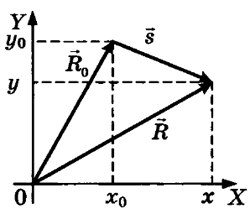
Радиус-вектор — вектор, начало которого совпадает с началом координат, а конец — с положением тела в данный момент времени. Проекции радиус-вектора на оси координат определяют координаты тела в данный момент времени.
Радиус-вектор позволяет задать положение материальной точки в заданной системе отсчета:
Равномерное прямолинейное движение — движение, при котором тело за любые равные промежутки времени, совершает равные перемещения.
Скорость при равномерном прямолинейном движении. Скорость  — векторная физическая величина, которая показывает, какое перемещение совершает тело за единицу времени.
— векторная физическая величина, которая показывает, какое перемещение совершает тело за единицу времени.
В векторном виде:
В проекциях на ось ОХ:
Дополнительные единицы измерения скорости:
1 км/ч = 1000 м/3600 с,
Измерительный прибор — спидометр — показывает модуль скорости.
Знак проекции скорости зависит от направления вектора скорости и оси координат:
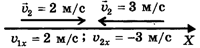
График проекции скорости представляет собой зависиость проекции скорости от времени:
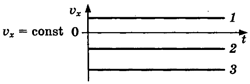
График скорости при равномерном прямолинейном движении — прямая, параллельная оси времени (1, 2, 3).
Если график лежит над осью времени (.1), то тело движется по направлению оси ОХ. Если график расположен под осью времени, то тело движется против оси ОХ (2, 3).
Чем дальше график от оси времени, тем больше модуль скорости (3).
Геометрический смысл перемещения.

При равномерном прямолинейном движении перемещение определяют по формуле  . Такой же результат получим, если вычислим площадь фигуры под графиком скорости в осях
. Такой же результат получим, если вычислим площадь фигуры под графиком скорости в осях  . Значит, для определения пути и модуля перемещения при прямолинейном движении необходимо вычислять площадь фигуры под графиком скорости в осях
. Значит, для определения пути и модуля перемещения при прямолинейном движении необходимо вычислять площадь фигуры под графиком скорости в осях  :
:

График проекции перемещения — зависимость проекции перемещения от времени.
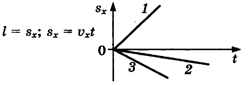
График проекции перемещения при равномерном прямолинейном движении — прямая, выходящая из начала координат (1, 2, 3).
Если прямая (1) лежит над осью времени, то тело движется по направлению оси ОХ, а если под осью (2, 3), то против оси ОХ.
Чем больше тангенс утла наклона (1) графика, тем больше модуль скорости.
График координаты — зависимость координаты тела от времени:
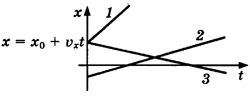
График координаты при равномерном прямолинейном движении — прямые (1, 2, 3).
Если с течением времени координата увеличивается (1, 2), то тело движется по направлению оси ОХ; если координата уменьшается (3), то тело движется против направления оси ОХ.
Чем больше тангенс угла наклона (1), тем больше модуль скорости.
Если графики координат двух тел пересекаются, то из точки пересечения следует опустить перпендикуляры на ось времени и ось координат.
Под относительностью мы понимаем зависимость чего-либо от выбора системы отсчета. Например, покой относителен; движение относительно и положение тела относительно.
Правило сложения перемещений. Векторная сумма перемещений

где  — перемещение тела относительно подвижной системы отсчета (ПСО);
— перемещение тела относительно подвижной системы отсчета (ПСО);  — перемещение ПСО относительно неподвижной системы отсчета (НСО);
— перемещение ПСО относительно неподвижной системы отсчета (НСО);  — перемещение тела относительно неподвижной системы отсчета (НСО).
— перемещение тела относительно неподвижной системы отсчета (НСО).
Векторное сложение: 
Сложение векторов, направленных вдоль одной прямой:

Сложение векторов, перпендикулярных друг другу 
По теореме Пифагора 
Сложение векторов, расположенных под углом  друг к другу
друг к другу

Правило сложения скоростей. Векторная сумма скоростей:

где  — скорость тела относительно подвижной системы отсчета (ПСО);
— скорость тела относительно подвижной системы отсчета (ПСО);  — скорость ПСО относительно неподвижной системы отсчета (НСО);
— скорость ПСО относительно неподвижной системы отсчета (НСО);  — скорость тела относительно неподвижной системы отсчета (НСО).
— скорость тела относительно неподвижной системы отсчета (НСО).
Относительная скорость. Векторная разность скоростей:

где  — скорость первого тела относительно второго (относительная скорость);
— скорость первого тела относительно второго (относительная скорость);  — скорость первого тела;
— скорость первого тела;  — скорость второго тела.
— скорость второго тела.
Вычитание векторов, направленных по одной прямой:
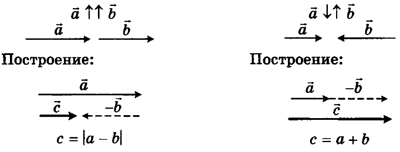
Вычитание векторов перпендикулярных друг другу 
Вычитание векторов, расположенных под углом  друг к другу:
друг к другу:
Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и Путь), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.

Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
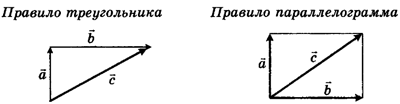
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения  (см.рис. 1.3).
(см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор  лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Здесь x, y, z — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х и у, то есть А(х, у). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
По теореме Пифагора
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:

Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Физика А.В. Перышкин
1.Что называется скоростью равномерного прямолинейного движения?
2. Как найти проекцию вектора перемещения тела, движущегося прямолинейно и равномерно, если известны проекция вектора скорости и время движения?
3. При каком условии модуль вектора перемещения, совершённого телом за некоторый промежуток времени, равен пути, пройденному телом за тот же промежуток времени?
4. Какую информацию о движении двух тел можно получить по графикам, изображённым на рисунке 7?
