
Тема: Найти модуль силы (Прочитано 4327 раз)
0 Пользователей и 1 Гость просматривают эту тему.
Найти модуль силы F(вектор)=4∙t∙i(вектор)+3∙cos(π∙t)∙j(вектор), Н, действующей на тело, в момент времени t = 1 c.
« Последнее редактирование: 25 Января 2015, 16:11 от Сергей »

Записан
Решение.
[ begin{align}
& vec{F}=4cdot tcdot vec{i}+3cdot cos (pi cdot t)cdot vec{j}, \
& F=sqrt{{{(4cdot t)}^{2}}+{{(3cdot cos (pi cdot t))}^{2}}} (1). \
& F=sqrt{{{(4cdot 1)}^{2}}+{{(3cdot cos pi )}^{2}}}=sqrt{{{(4)}^{2}}+{{(3cdot (-1))}^{2}}}=5,0 H. \
end{align} ]
« Последнее редактирование: 22 Февраля 2015, 06:52 от alsak »
Записан
Формула модуля равнодействующей силы в физике
Формула модуля равнодействующей силы
На тело могут оказывать действие не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы.
Формула равнодействующей всех сил
Пусть на тело воздействуют в один и тот же момент времени N сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Сила является векторной величиной. Следовательно, силы, действующие на тело, нужно складывать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline{F}$) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
[overline{F}={overline{F}}_1+{overline{F}}_2+dots +{overline{F}}_N=sumlimits^N_{i=1}{{overline{F}}_i} left(1right).]
Формула (1) – это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена также как вектор ускорения тела.
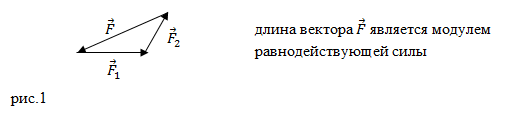
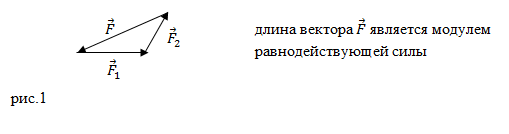
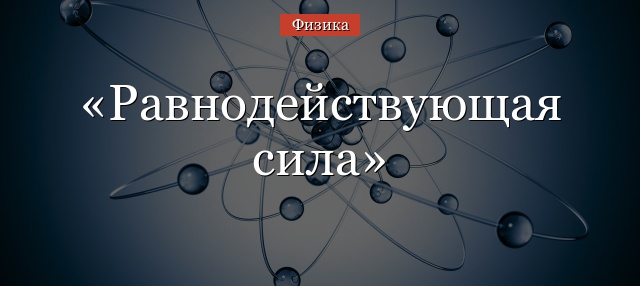
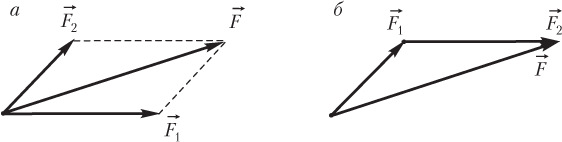
Складывают векторы, используя правило треугольника (рис.1)
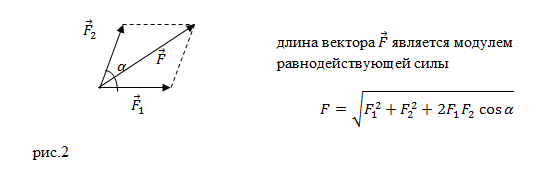
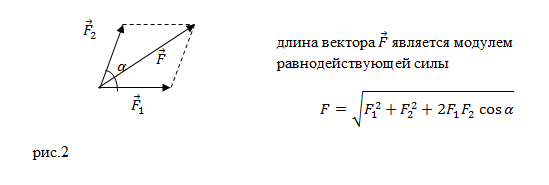
правило параллелограмма (рис.2).
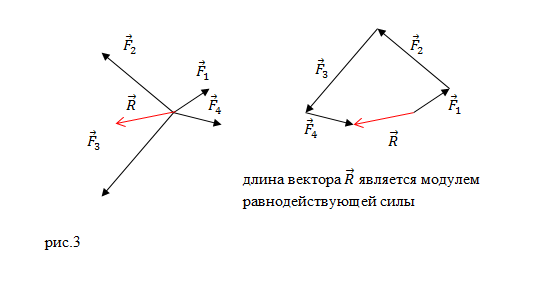
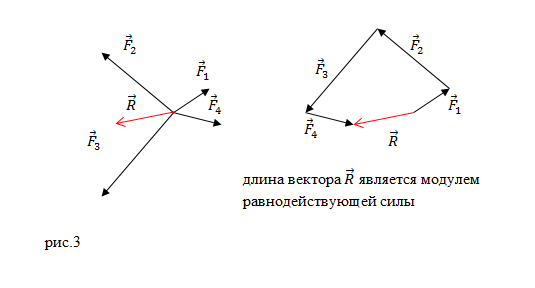
или многоугольника (рис.3):
Второй закон Ньютона и формула модуля равнодействующей
Основной закон динамики поступательного движения в механике можно считать формулой для нахождения модуля равнодействующей силы, приложенной к телу и вызывающей ускорение этого тела:
[overline{F}=sumlimits^N_{i=1}{{overline{F}}_i}=moverline{a}left(2right).]
$overline{F}=0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета тело скорость движения тела.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач с решением
Пример 1
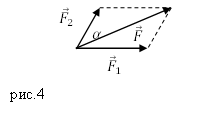
Задание. К материальной точке приложены силы, направленные под углом $alpha =60{}^circ $ друг к другу (рис.4). Чему равен модуль равнодействующей этих сил, если $F_1=40 $Н; $F_2=20 $Н?
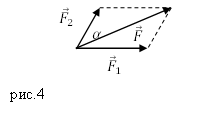
Решение. Силы на рис. 1 сложим, используя правило параллелограмма. Длину равнодействующей силы $overline{F}$ найдем, применяя теорему косинусов:
[F=sqrt{F^2_1+F^2_2+2F_1F_2{cos alpha }} left(1.1right).]
Вычислим модуль равнодействующей силы:
[F=sqrt{{40}^2+{20}^2+2cdot 40cdot 20{cos (60{}^circ ) }}approx 52,92 left(Нright).]
Ответ. $F=52,92$ Н
Пример 2
Задание. Как изменяется модуль равнодействующей силы со временем, если материальная точка массы $m$ перемещается в соответствии с законом: $s=A{cos (omega t)(м) }$, где $s$ – путь пройденный точкой; $A=const;; omega =const?$ Чему равна максимальная величина этой силы?
Решение. По второму закону Ньютона равнодействующая сил, действующих на материальную точку равна:
[overline{F}=moverline{a}left(2.1right).]
Следовательно, модуль силы можно найти как:
[F=ma left(2.2right).]
Ускорение точки будем искать, используя связь между ним и перемещением точки:
[a=frac{d^2s}{dt^2}left(2.3right).]
Первая производная от $s$ по времени равна:
[frac{ds}{dt}=frac{d}{dt}(A{cos (omega t))=-Aomega {rm sin}?(omega t) (м) }left(frac{м}{с}right)(2.4);;]
вторая производная:
[frac{d^2s}{dt^2}=-A{omega }^2{cos left(omega tright) } left(frac{м}{с^2}right)(2.5).]
Подставим полученный в (2.5) результат, в формулу модуля для равнодействующей силы (2.2) запишем как:
[F=mA{omega }^2{cos left(omega tright) }left(Нright).]
Так как косинус может быть меньше или равен единицы, то максимальное значение модуля силы, действующей на точку, составит:
[F_{max}=mA{omega }^2 left(Нright).]
Ответ. $F=mA{omega }^2{cos left(omega tright) }left(Нright); F_{max}=mA{omega }^2 left(Нright)$
Читать дальше: формула периода колебаний математического маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Содержание:
- Динамика материальной точки
- Прямая задача динамики точки
- Основные законы динамики
- Уравнения движения материальной точки в декартовых и естественных системах отсчета
- Две основные задачи динамики материальной точки
- Порядок решения прямой задачи динамики невольной материальной точки
- Примеры решения задач на тему: Динамика материальной точки
- Решение задач на тему: Движение материальной точки по криволинейной траектории
Динамика − раздел механики, в котором изучается движение тел под действием приложенных сил. Основной задачей динамики является определение кинематического уравнения движения материальной точки, если известны, приложенные силы к ней со стороны окружающих тел и начальные условия, положение и скорость тела в начальный момент времени.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Динамика материальной точки
Динамикой называется раздел теоретической механики, в котором изучается механическое движение материальных объектов в зависимости от физических факторов, то есть от причин, вызывающих это движение.
Напомним, что в классической механике движение материальных объектов рассматривается с помощью абстрактных моделей: материальной точки, механической системы и абсолютно твердого тела.
Материальная точка – это материальное тело, размерами и разницей в движении его частей которого можно пренебречь.
Механической системой (системой материальных точек) называется совокупность материальных точек, которые между собой взаимодействуют, то есть, положение и движение которых взаимосвязаны.
Абсолютно твердым телом называется совокупность материальных точек, расстояния между которыми во время движения не меняются.
Движение механической системы определяется движением всех его точек. Поэтому изучение динамики начинается с изучения движения одной материальной точки.
В динамике точки рассматриваются две основные задачи:
– движение точки задается, а необходимо найти силы, которые это движение реализуют (первая, или прямая задача);
– силы задаются, а необходимо определить закон движения, который является результатом действия этих сил.
Для решения этих задач используются базовые сведения из статики и кинематики, а также законы динамики, то есть, общие законы движения тел и механических систем под действием приложенных к ним сил. Эти законы впервые в наиболее полном виде сформулированы Исааком Ньютоном в конце XVII века.
Прямая задача динамики точки
Первая (прямая) задача динамики содержит условие: По заданному движению, совершаемому точкой данной массы, требуется найти неизвестную действующую силу.
Основные законы динамики
В динамике изучается движение материальных систем в связи с действующими на них силами. Самым простым объектом механики является материальная точка.
Материальная точка – тело, размерами которого при решении данной задачи можно пренебречь.
Если на положение материальной точки и на ее движение не наложены никакие ограничения, точка называется свободной, в противном случае имеем дело с движением несвободной точки.
Движение механической системы определяется движением всех ее материальных точек. Поэтому изучение динамики начинается с изучения движения одной материальной точки.
В основе динамики лежат три закона И. Ньютона, которые впервые в наиболее полном и законченном виде были сформулированы в книге “Математические начала натуральной философии” (1686 г.).
1. Первый закон (закон инерции):
изолированная от внешних действий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит этого состояния.
2. Второй закон (основной закон динамики):
cила, которая действует на материальную точку, равна произведению массы точки на ее ускорение, а направление силы совпадает с направлением ускорения:

Если на точку действует несколько сил, то их можно заменить равнодействующей:

Если точка движется по какой-то поверхности, то на нее, кроме активных сил действует и реакция связи  .
.
Таким образом в общем случае в уравнении (1.1):

3. Третий закон (закон равенства действия и противодействия):
Силы взаимодействия двух материальных точек равны между собой по модулю и направлены вдоль одной прямой, которая соединяет эти точки, в противоположные стороны.
Уравнения движения материальной точки в декартовых и естественных системах отсчета
Вместо уравнения движения (1.1) в векторной форме можно получить уравнение в скалярной форме, если спроектировать (1.1) на оси декартовой или естественной систем координат.
Уравнение движения в декартовых координатах:

Здесь  – проекции силы
– проекции силы  на соответствующие декартовые оси координат;
на соответствующие декартовые оси координат;
 – проекции ускорения
– проекции ускорения  на те же оси.
на те же оси.
Две основные задачи динамики материальной точки
Первая задача (прямая): зная массу точки  и законы ее движения, например, в декартовых координатах:
и законы ее движения, например, в декартовых координатах:

определить равнодействующую приложенных к точке сил.
Сначала нужно определить проекции ускорения точки на оси координат:

Используя уравнение движения точки в декартовых координатах (1.3), определяем значения проекций равнодействующей приложенных к точке сил, а также ее модуль:

Направление вектора силы относительно осей координат определяется с помощью направляющих косинусов:

Вторая задача (обратная): зная силы, которые действуют на материальную точку, ее массу, а также первоначальные условия (положение точки и ее скорость в некоторые моменты времени, не обязательно в начальный), получить уравнение движения точки.
Порядок решения прямой задачи динамики невольной материальной точки
1. Изобразить на рисунке материальную точку в промежуточном положении.
2. Показать активные силы и реакции связей, которые на нее действуют.
3. Выбрать систему отсчета.
4. Записать векторное уравнение движения точки в форме второго закона динамики (1.1).
5. Спроектировать векторное уравнение движения точки на выделенные оси координат.
6. Из полученных уравнений определить необходимые величины.
Примеры решения задач на тему: Динамика материальной точки
Задача № 1
В шахту начинает опускаться равноускорено лифт, масса которого  В первые 10 с он проходит 35 м.
В первые 10 с он проходит 35 м.
Определить натяжение  каната, на котором висит лифт.
каната, на котором висит лифт.
Решение. Изобразим кабину лифта в произвольном положении (рис.1.1). На лифт действует сила тяжести  , которая направлена вниз, и натяжение каната
, которая направлена вниз, и натяжение каната  , который направлен вдоль троса вверх.
, который направлен вдоль троса вверх.

Движение происходит по вертикали, поэтому направим ось  вертикально вниз в соответствии с направлением скорости и ускорения.
вертикально вниз в соответствии с направлением скорости и ускорения.
Запишем уравнение движения кабины лифта в форме второго закона Ньютона:

где  – ускорение кабины лифта.
– ускорение кабины лифта.
С учетом сил, действующих на кабину лифта, уравнение будет иметь вид:

Спроектируем это уравнение на ось :

С учетом того, что  , находим
, находим

Мы получили зависимость натяжения каната от ускорения, с которым движется кабина лифта.
Проанализируем эту зависимость. Может быть три случая:
В первом случае

То есть, если кабина лифта движется без ускорения в любом направлении, натяжение троса будет равняться силе тяжести кабины лифта.
Во втором случае натяжение троса меньше силы тяжести кабины лифта, потому что  , а если
, а если  , то
, то 
В третьем случае натяжение троса всегда больше силы тяжести кабины лифта, потому что  и
и 
Например, когда  то есть натяжение троса вдвое превышает силу тяжести кабины лифта.
то есть натяжение троса вдвое превышает силу тяжести кабины лифта.
В нашей задаче ускорение определится с выражения для пути при равнопеременном движении с учетом того, что начальная скорость  :
:

Тогда:

Ответ: натяжение троса 
Задача № 2
К телу весом  которое лежит на столе, привязали нить, второй конец которой (рис.1.2) держат в руке.
которое лежит на столе, привязали нить, второй конец которой (рис.1.2) держат в руке.

Определить, с каким ускорением  надо поднимать тело вверх вертикально, чтобы нить оборвалась, если она рвется когда натяжение достигает величины
надо поднимать тело вверх вертикально, чтобы нить оборвалась, если она рвется когда натяжение достигает величины 
Решение: Изобразим тело с привязанной к нему нитью (рис.1.2). Покажем силы, которые действуют на тело: сила тяжести и натяжение нити . Ось направляется по вертикали вверх в положительном направлении скорости и ускорения.
Запишем уравнение движения тела в векторной форме:

Спроектируем это уравнение на ось :

Откуда:

Если учесть числовые данные, то

Ответ: 
Задача № 3
Пуля весом  падает вертикально вниз под действием силы тяжести и испытывает опору среды (рис.1.3). Закон движения шара соответствует уравнению
падает вертикально вниз под действием силы тяжести и испытывает опору среды (рис.1.3). Закон движения шара соответствует уравнению  , причем выражается в сантиметрах,
, причем выражается в сантиметрах,  – в секундах.
– в секундах.

Определить силу сопротивления среды  в виде функции скорости, то есть
в виде функции скорости, то есть 
Решение. Изобразим шар в произвольном положении на траектории и покажем силы, которые на него действуют (рис.1.3):
 – сила тяжести;
– сила тяжести;
 – сила сопротивления среды.
– сила сопротивления среды.
Движение шара происходит вдоль вертикали, поэтому направим ось  вертикально вниз по направлению скорости. Тогда положение шара будет определяться координатой
вертикально вниз по направлению скорости. Тогда положение шара будет определяться координатой  .
.
Запишем уравнение движения шара в векторной форме:

и спроектируем его на ось  :
:

откуда

Таким образом, чтобы определить силу сопротивления , необходимо знать ускорение шара  .
.
Поскольку закон изменения координаты известен, то

Находим первую и вторую производные от закона движения пули:

Таким образом,

Из выражения  (с учетом того, что
(с учетом того, что  ) вытекает
) вытекает

то есть

Ответ: 
Задача № 4
Движение тела массой  выражается уравнениями:
выражается уравнениями:

где  и
и  – в метрах, а
– в метрах, а  – в секундах.
– в секундах.
Определить силу  , которая действует на тело, принимая его за материальную точку (рис.1.4).
, которая действует на тело, принимая его за материальную точку (рис.1.4).

Решение. Проекции на оси координат силы  , которая приложена к телу, определяются по формулам:
, которая приложена к телу, определяются по формулам:

где  и
и  – проекции ускорения тела на оси координат.
– проекции ускорения тела на оси координат.
В данном случае

Итак

Модуль силы  равен:
равен:

Сила направлена вертикально вниз, поскольку  Таким образом, искомая сила, модуль которой равен
Таким образом, искомая сила, модуль которой равен  , является силой тяжести.
, является силой тяжести.
Ответ: 
Задача № 5
Прямолинейное движение ножа  резального аппарата жатки зерноуборочного комбайна (рис.1.5) приближено выражается уравнением
резального аппарата жатки зерноуборочного комбайна (рис.1.5) приближено выражается уравнением  (
( – в метрах; – в секундах).
– в метрах; – в секундах).

Определить силу , которая приводит нож к движению, в зависимости от расстояния . Вес ножа 
Объяснение: Для привода ножа резального аппарата жатки используются плоские и пространственные механизмы. Среди плоских механизмов нашли применение кривошипно-шатунные, которые состоят из кривошипа 1, шатуна 2 и ножа жатки 3. Механизм преобразует вращательное движение кривошипа 1 в обратно поступательное движение ножа 3.
В уборочных машинах ось кривошипного пальца  находится выше линии движения ножа .
находится выше линии движения ножа .
Решение. Изобразим нож резного аппарата в среднем положении на перемещении и покажем силы, которые действуют на него.
На нож действует сила веса , нормальная реакция опорной поверхности направляющих ножа и сила со стороны шатуна  , которая вызывает движение ножа.
, которая вызывает движение ножа.
Запишем уравнение движения ножа в векторной форме:

Проектируем это уравнение на направление движения ножа (ось ):
 или
или 
Из последнего уравнения следует, что для определения силы необходимо знать ускорение .
Поскольку задан закон движения ножа :  то ускорение определяется как вторая производная от закона движения по времени:
то ускорение определяется как вторая производная от закона движения по времени:

Итак,

Учтем, что  и получим:
и получим:

Ответ: 
Задача № 6
Нагруженная вагонетка массой  опускается по канатной железной дороге с наклоном
опускается по канатной железной дороге с наклоном  и имеет скорость
и имеет скорость  (рис.1.6).
(рис.1.6).

Определить натяжение каната при равномерном опускании и при торможении вагонетки, если время торможения  , общий коэффициент сопротивления движению
, общий коэффициент сопротивления движению  . При торможении вагонетка движется равнозамедленно.
. При торможении вагонетка движется равнозамедленно.
Решение. Изобразим вагонетку в произвольном положении. Покажем силы, которые действуют на нее: силу тяжести , нормальную реакцию железной дороги , натяжение каната и силу сопротивления  .
.
Выбираем декартовую систему координат: ось направим параллельно дороге в сторону движения; ось – вверх перпендикулярно дороге. Запишем векторное уравнение движения вагонетки в форме второго закона Ньютона:

Проектируем векторное уравнение движения на оси координат:

Поскольку  все время движения вагонетки, то
все время движения вагонетки, то  , и из уравнение (2) легко находим величину нормальной реакции:
, и из уравнение (2) легко находим величину нормальной реакции:

Тогда общая сила сопротивления движению составляет:

Для определения натяжения используем уравнение (1)

При равномерном опусканье  и
и  составит:
составит:

При равнозамедленном торможении

где  – начальная скорость;
– начальная скорость;
 – конечная скорость.
– конечная скорость.
Таким образом

Тогда

Ответ: 
Из полученных результатов следует, что при торможении нагрузка на канат увеличивается по сравнению с нагрузкой при равномерном движении.
Задача № 7
Вагон весом скатывается по колее, которая наклонена к горизонту под углом  .
.
Определить силу торможения вагона , которая вызывается трением колес по рельсам, предполагая, что движение вагона происходит с постоянным ускорением, а также то значение угла , при котором вагон будет скатываться равномерно.
Решение. Изображаем вагон в виде материальной точки в произвольном положении на наклонной плоскости и показываем силы, которые на него действуют (рис.1.7): – сила тяжести вагона; – нормальная реакция рельсов; – сила трения.

Выбираем декартовую систему координат, причем ось направим параллельно рельсам в сторону движения вагона; а ось – перпендикулярно рельсам.
Запишем уравнение движения вагона в векторной форме:

и спроектируем его на оси выбранной системы координат:

По уравнению (2) определим силу торможения вагона:

По условиям задачи вагон движется с ускорением  которое направлено вдоль оси
которое направлено вдоль оси  , то есть
, то есть  .
.
Если подставим в уравнение (3) , то получим:

Определим значение угла , при котором вагон будет скатываться равномерно. Поскольку

то

где  – коэффициент трения.
– коэффициент трения.
Откуда получим

Из этого уравнения вытекает, что при изменении угла , можно найти значение угла, при котором  . Если в уравнении (4) присвоить , то
. Если в уравнении (4) присвоить , то

Поскольку известно, что коэффициент трения равен тангенсу угла трения  , то
, то

Таким образом, при углу наклона рельсов к горизонту, что равен углу трения , вагон будет скатываться равномерно.
Ответ: 
Задачи, которые рекомендуются для самостоятельной работы: 26.2, 26.8, 26.10, 26.20, 26.24 [2].
Решение задач на тему: Движение материальной точки по криволинейной траектории
При решении задач, связанных с движением точки по криволинейной траектории, если траектория известна, удобно рассматривать движение точки в естественной системе координат  (рис.1.8):
(рис.1.8):

где  – модуль скорости точки,
– модуль скорости точки,
 – радиус кривизны траектории в заданном положении точки.
– радиус кривизны траектории в заданном положении точки.

В уравнениях (1.6) и (1.8)  суммы проекций сил, действующих на точку, на направления осей: касательной (
суммы проекций сил, действующих на точку, на направления осей: касательной ( ), нормальной (
), нормальной ( ) и бинормальной (
) и бинормальной ( ) к траектории в заданном положении точки.
) к траектории в заданном положении точки.
Порядок решения прямой задачи динамики точки в случае использования уравнений (1.6) и (1.8) совпадает с рекомендациями пунктов 1 и 6 занятия № 1.
Если задано уравнение движения материальной точки по траектории в виде  , то для нахождения равнодействующей приложенных к этой точке сил, необходимо сначала найти проекции
, то для нахождения равнодействующей приложенных к этой точке сил, необходимо сначала найти проекции  и
и  полного ускорения точки:
полного ускорения точки:

Далее, с уравнений (1.6), (1.7) находим значения касательной и нормальной проекции силы :

Модуль приложенной к материальной точке силы, при естественном способе обозначения движения, будет равен

Задача № 1
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить модуль равнодействующей сил, приложенных к материальной точке.
Решение. В задаче движение материальной точки задано естественным способом, поэтому для определения равнодействующей сил воспользуемся зависимостями (1.6) и (1.7):

Определим касательное и нормальное ускорение материальной точки:

Поскольку  , то проекция
, то проекция  равнодействующей на касательную ось равняется нулю.
равнодействующей на касательную ось равняется нулю.
Находим нормальную составляющую равнодействующей сил:

Модуль равнодействующей определим из выражения (1.11):

Таким образом, заданное движение материальной точки происходит под действием силы, постоянной по модулю и направленной вдоль радиуса к центру окружности.
Ответ: 
Задача № 2
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить проекцию  равнодействующей сил, приложенных к материальной точке, на касательную к траектории в момент времени
равнодействующей сил, приложенных к материальной точке, на касательную к траектории в момент времени 
Решение. Для определения проекции воспользуемся уравнением (1.6):

Сначала найдем значение скорости материальной точки:

При 
Определяем величину касательного ускорения

при 
Подставив в уравнение (1) значения  и , получим:
и , получим:

Ответ: 
Задача № 3
Материальная точка массой  движется по окружности с радиусом
движется по окружности с радиусом  согласно закону
согласно закону 
Определить модуль  равнодействующей сил, действующих на точку, в момент времени
равнодействующей сил, действующих на точку, в момент времени 
Решение. Поскольку движение материальной точки задано естественным способом, то модуль равнодействующей сил, приложенных к точке, определяется по зависимостям (1.10) и (1.11):

Величины касательного и нормального ускорения материальной точки определяются по уравнениям (1.9):

Учитывая, что скорость точки

то касательное ускорение точки равно:

Поскольку в момент времени  скорость точки:
скорость точки:

то нормальное ускорение точки составит:

Определяем  и
и  по уравнениям (1.10):
по уравнениям (1.10):

Тогда модуль равнодействующей сил, действующих на материальную точку, равен:

Ответ: 
Задача № 4
На криволинейных участках железнодорожного пути наружный рельс поднимают выше над внутренним (рис.1.9). При движении поезда на этом участке его скорость поддерживают такой, чтобы давление вагона на рельсы было направлено перпендикулярно железнодорожному полотну.

Определить величину  повышения внешнего рельса над внутренним при следующих данных: радиус закругления железнодорожного пути
повышения внешнего рельса над внутренним при следующих данных: радиус закругления железнодорожного пути  , скорость поезда
, скорость поезда  , расстояние между рельсами
, расстояние между рельсами 
Решение. На вагон действуют: сила тяжести , которая направлена вертикально вниз, и реакции рельсов на колеса  и
и  , которые направлены перпендикулярно железнодорожному полотну.
, которые направлены перпендикулярно железнодорожному полотну.
Запишем уравнение движения вагона в векторной форме:

где – ускорение вагона.
Поскольку движение происходит по криволинейной траектории, то выбираем естественную систему координат: ось  направим по нормали к центру кривизны траектории, а ось
направим по нормали к центру кривизны траектории, а ось  – по касательной в сторону движения вагона. Бинормаль, ось
– по касательной в сторону движения вагона. Бинормаль, ось  , на рис. 1.9 не показано.
, на рис. 1.9 не показано.
Проектируем уравнение движения (1) на ось :
 или
или 
Из рис. 1.8 видно, что 
Итак,

Подставив числовые значения известных величин, получаем:

Ответ: 
Задача № 5
Груз  весом
весом  который подвешен к нитке длиной
который подвешен к нитке длиной  в неподвижной точке , представляет собой конический маятник (рис.1.10), то есть движется по окружности в горизонтальной плоскости, при этом нитка с вертикалью образует угол
в неподвижной точке , представляет собой конический маятник (рис.1.10), то есть движется по окружности в горизонтальной плоскости, при этом нитка с вертикалью образует угол  .
.

Определить величину скорости груза и модуль силы натяжения нити .
Решение. Изобразим груз в любом положении и покажем силы, которые на него действуют: силу тяжести , которая направлена вертикально вниз, и натяжение нити , которое направлено к точке подвеса .
Для решения задачи выбираем естественную систему координат: ось  направлена по касательной к окружности в сторону движения груза, ось – по нормали к центру кривизны и ось – вертикально вверх.
направлена по касательной к окружности в сторону движения груза, ось – по нормали к центру кривизны и ось – вертикально вверх.
Запишем уравнение движения груза в векторной форме:

Проектируем это векторное уравнение на оси координат:

Модуль силы натяжения нити найдем из третьего из уравнений (1), учитывая, что  :
:

Из второго из уравнений (1) найдем , если учесть, что

Тогда

Откуда

Ответ: 
Задача № 6
Материальная точка весом  движется по горизонтальной поверхности под действием силы . В период разгона точки путь, который она проходит, меняется по закону
движется по горизонтальной поверхности под действием силы . В период разгона точки путь, который она проходит, меняется по закону  ( – в секундах, – в метрах). Траекторией движения точки на плоскости (рис.1.11) является окружность с радиусом
( – в секундах, – в метрах). Траекторией движения точки на плоскости (рис.1.11) является окружность с радиусом 
Определить модуль силы  , которая действует, в момент, когда модуль скорости точки равен
, которая действует, в момент, когда модуль скорости точки равен 
Решение. Изобразим точку в любом положении на окружности (рис.1.11). Покажем силы, действующие на материальную точку: силу тяжести ; реакцию поверхности , которая перпендикулярна поверхности, и заданную силу , которая лежит в плоскости движения точки и направлена в сторону центра кривизны траектории.

С точкой повяжем естественную систему координат. Ось  направим по касательной к окружности в сторону движения, а ось
направим по касательной к окружности в сторону движения, а ось  – перпендикулярно ей в сторону центра кривизны окружности.
– перпендикулярно ей в сторону центра кривизны окружности.
Запишем уравнение движения точки в виде второго закона Ньютона:

Спроектируем это векторное уравнение на оси выбранной системы координат:

Поскольку закон движения известен, то:

По условиям Найдем момент времени, когда это условие выполняется:

Тогда:

Учитывая, что масса точки равна  , находим:
, находим:

Определяем модуль искомой силы:

Ответ: 
Задача № 7
Радиус закругления моста в точке  равен
равен  (рис.1.12).
(рис.1.12).

Определить, с какой силой автомобиль давит на мост в точке , если его масса  , а модуль скорости движения
, а модуль скорости движения 
Решение. Рассмотрим автомобиль как материальную точку, поскольку его размерами по сравнению с размерами моста можно пренебречь. Изобразим автомобиль в точке моста (рис.1.12) и покажем силы, которые действуют на него: – силу тяжести автомобиля и – реакцию моста.
Поскольку автомобиль движется по криволинейной траектории, то для решения задачи воспользуемся естественной системой координат  .
.
Запишем уравнение движения автомобиля в векторной форме:

и спроектируем его на оси выбранной системы координат:
 (поскольку
(поскольку  то
то  ), (1)
), (1)

Из уравнения (2) определяем реакцию моста по модулю:

Сила давления  автомобиля на мост равна по модулю реакции моста, но направлена вниз.
автомобиля на мост равна по модулю реакции моста, но направлена вниз.
Поскольку вес автомобиля  равен
равен

то, если мост выпуклый, сила давления автомобиля на него уменьшается по сравнению с тем случаем, когда автомобиль движется по горизонтальному мосту.
Зададим дополнительный вопрос: с какой скоростью  должен двигаться автомобиль, чтобы сила давления автомобиля на мост равнялась нулю?
должен двигаться автомобиль, чтобы сила давления автомобиля на мост равнялась нулю?
Поскольку  , то
, то
 или
или
Отсюда

Ответ: 
Задача № 8
Камень весом  который привязан к нитке длиной
который привязан к нитке длиной  , описывает окружность в вертикальной плоскости (рис.1.13).
, описывает окружность в вертикальной плоскости (рис.1.13).

Определить наименьшее значение угловой скорости вращения, при которой нить разорвется, если ее сопротивление разрыву составляет 
Решение. Представим камень в любом положении на дуге окружности. Положение точки определяется углом , который отсчитывается от вертикали  в направлении угловой скорости.
в направлении угловой скорости.
На камень (точку ) действуют сила тяжести и сила натяжения нити .
С точкой свяжем естественную систему координат  и запишем уравнение движения точки в векторной форме:
и запишем уравнение движения точки в векторной форме:

Спроектируем это уравнение на оси выбранной системы координат:

Заметим, что  , а
, а  . То есть уравнение (2) преобразуется в вид:
. То есть уравнение (2) преобразуется в вид:

Отсюда

Из уравнения (3) вытекает, что при  угловая скорость
угловая скорость  является только функцией угла . Наименьшее значение , когда нить разрывается, будет при
является только функцией угла . Наименьшее значение , когда нить разрывается, будет при  , то есть, когда
, то есть, когда  , что соответствует положению камня в точке
, что соответствует положению камня в точке  . Таким образом:
. Таким образом:

Ответ: 
Задача № 9
Трек для испытания автомобилей на кривых отрезках пути имеет виражи, профиль которых (рис.1.14) в поперечном пересечении является прямой, которая наклонена к горизонту так, что внешний край трека выше внутреннего.

Определить, с какой наименьшей и самой большой скоростью можно ехать по виражу, имеющему радиус кривизны  и угол наклона к горизонту ? Коэффициент трения шин о поверхность трека считать известным.
и угол наклона к горизонту ? Коэффициент трения шин о поверхность трека считать известным.
Решение. На автомобиль, который движется по виражу, действуют: сила тяжести , сила нормального давления со стороны поверхности виража и сила трения  , которая направлена вдоль поверхности виража в плоскости, которая перпендикулярна направлению скорости. Возникновение силы трения обуславливается трением колес автомобиля о поверхность виража.
, которая направлена вдоль поверхности виража в плоскости, которая перпендикулярна направлению скорости. Возникновение силы трения обуславливается трением колес автомобиля о поверхность виража.
Рассмотрим движение центра тяжести автомобиля (точка ), считая, что все силы приложены к этой точке. Первым рассмотрим случай движения автомобиля, когда сила трения  (рис.1.14, а). С точки повяжем естественную систему координат
(рис.1.14, а). С точки повяжем естественную систему координат  : нормаль
: нормаль  направим в центр кривизны,
направим в центр кривизны,  – перпендикулярно .
– перпендикулярно .
Запишем уравнение движения автомобиля в векторной форме:

и спроектируем это уравнение на оси координат и :

Из уравнения (1) найдем величину нормальной реакции :

Подставим найденное значение в уравнение (2) и определим скорость автомобиля, когда сила трения о поверхность трека равна нулю:

При максимальной скорости автомобиля  сила трения направлена к нижнему краю виража (рис.1.14, б) и равняется
сила трения направлена к нижнему краю виража (рис.1.14, б) и равняется 
Векторное уравнение движения автомобиля в этом случае будет иметь вид:

Проектируем уравнение (4) на оси  :
:

Уравнение (5) перепишем в виде:

откуда

Подставим значение в уравнение (6) и определим максимальное значение скорости :

Отсюда:

Если скорость автомобиля минимальная  (рис.1.14, в), то трение направлено к верхнему краю трека и проекции уравнения (4) на оси будут иметь вид:
(рис.1.14, в), то трение направлено к верхнему краю трека и проекции уравнения (4) на оси будут иметь вид:

Из уравнений (8) и (9) получаем:

Ответ: 
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Содержание
- Формула равнодействующей всех сил
- Второй закон Ньютона и формула модуля равнодействующей
- Примеры задач с решением
- О причинах изменений
- Сложение сил
- Задачи
- Что мы узнали?
На тело могут оказывать действие не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы.
Формула равнодействующей всех сил
Пусть на тело воздействуют в один и тот же момент времени N сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Сила является векторной величиной. Следовательно, силы, действующие на тело, нужно складывать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline$) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
Формула (1) — это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена также как вектор ускорения тела.
Складывают векторы, используя правило треугольника (рис.1)
правило параллелограмма (рис.2).
или многоугольника (рис.3):
Второй закон Ньютона и формула модуля равнодействующей
Основной закон динамики поступательного движения в механике можно считать формулой для нахождения модуля равнодействующей силы, приложенной к телу и вызывающей ускорение этого тела:
$overline=0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета тело скорость движения тела.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач с решением
Задание. К материальной точке приложены силы, направленные под углом $alpha =60<>^circ $ друг к другу (рис.4). Чему равен модуль равнодействующей этих сил, если $F_1=40 $Н; $F_2=20 $Н?
Решение. Силы на рис. 1 сложим, используя правило параллелограмма. Длину равнодействующей силы $overline$ найдем, применяя теорему косинусов:
Вычислим модуль равнодействующей силы:
[F=sqrt<<40>^2+<20>^2+2cdot 40cdot 20<cos (60<>^circ ) >>approx 52,92 left(Н
ight).]
Ответ. $F=52,92$ Н
Задание. Как изменяется модуль равнодействующей силы со временем, если материальная точка массы $m$ перемещается в соответствии с законом: $s=A<cos (omega t)(м) >$, где $s$ — путь пройденный точкой; $A=const;; omega =const?$ Чему равна максимальная величина этой силы?
Решение. По второму закону Ньютона равнодействующая сил, действующих на материальную точку равна:
Следовательно, модуль силы можно найти как:
Ускорение точки будем искать, используя связь между ним и перемещением точки:
Первая производная от $s$ по времени равна:
Подставим полученный в (2.5) результат, в формулу модуля для равнодействующей силы (2.2) запишем как:
Так как косинус может быть меньше или равен единицы, то максимальное значение модуля силы, действующей на точку, составит:
О причинах изменений
Классическая механика разделена на два раздела – кинематику, при помощи уравнений описывающую траекторию движения тел, и динамику, которая разбирается с причинами изменения положения объектов или самих объектов.
Причиной изменений выступает некоторая сила, которая есть мера действия на тело других тел или силовых полей (например, электромагнитное поле или гравитация). К примеру, сила упругости вызывает деформацию тела, сила тяжести – падение тел на Землю.
Сила – это векторная величина, то есть, ее действие – направленное. Модуль силы в общем случае пропорционален некоему коэффициенту (для деформации пружины – это ее жесткость), а также параметрам действия (масса, заряд).
Сложение сил
В случае, когда на тело действует n сил, говорят о равнодействующей силе, а формула второго закона Ньютона принимает вид:
$mvec a = sumlimits_^n vec F_i$.

Рис. 1. Равнодействующая сил.
Поскольку F – векторная величина, сумма сил называется геометрической (или векторной). Такое сложение выполняется по правилу треугольника или параллелограмма, либо по компонентам. Поясним каждый метод на примере. Для этого запишем формулу равнодействующей силы в общем виде:
$F = sumlimits_^n vec F_i$
А силу $F_i$ представим в виде:
Тогда суммой двух сил будет новый вектор $F_ = (F_ + F_, F_ + F_, F_ + F_)$.
Рис. 2. Покомпонентное сложение векторов.
Абсолютное значение равнодействующей можно рассчитать так:
Теперь дадим строгое определение: равнодействующая сила есть векторная сумма всех сил, оказывающих влияние на тело.
Разберем правила треугольника и параллелограмма. Графически это выглядит так:
Рис. 3. Правило треугольника и параллелограмма.
Внешне они кажутся различными, но когда доходит до вычислений, сводятся к нахождению третьей стороны треугольника (или, что тоже самое, диагонали параллелограмма) по теореме косинусов.
Если сил больше двух, иногда удобней пользоваться правилом многоугольника. По своей сути – это всё тот же треугольник, только повторенный на одном рисунке некоторое количество раз. В случае, если по итогу контур получился замкнутым, общее действие сил равно нулю и тело покоится.
Задачи
- На ящик, размещенный в центре декартовой прямоугольной системы координат, действуют две силы: $F_1 = (5, 0)$ и $F_2 = (3, 3)$. Рассчитать равнодействующую двумя методами: по правилу треугольника и при помощи покомпонентного сложения векторов.
Решение
Равнодействующей силой будет векторная сумма $F_1$ и $F_2$.
$vec F = vec F_1 + vec F_2 = (5+3, 0+3) = (8, 3)$
Абсолютное значение равнодействующей силы:
Теперь получим тоже значение при помощи правила треугольника. Для этого сначала найдем абсолютные значения $F_1$ и $F_2$, а также угол между ними.
Угол между ними – 45˚, так как первая сила параллельна оси Оx, а вторая делит первую координатную плоскость пополам, то есть является биссектрисой прямоугольного угла.
Теперь, разместив вектора по правилу треугольника, рассчитаем по теореме косинусов равнодействующую:
- На машину действуют три силы: $F_1 = (-5, 0)$, $F_2 = (-2, 0)$, $F_1 = (7,0)$. Какова их равнодействующая?
Решение
Достаточно сложить иксовые компоненты векторов:
Что мы узнали?
В ходе урока было введено понятие равнодействующей сил и рассмотрены различные методы ее расчета, а также введена запись второго закона Ньютона для общего случая, когда количество сил неограниченно.
Силу, заменяющую собой действие на тело нескольких сил, называют равнодействующей ; равнодействующая сила равна векторной сумме сил, приложенных к данному телу:
F → = F → 1 + F → 2 + . + F → N ,
где F → 1 , F → 2 , . F → N — силы, приложенные к данному телу.
Равнодействующую двух сил удобно находить графически по правилу параллелограмма (рис. 2.14, а ) или треугольника (рис. 2.14, б ).
Для сложения нескольких сил (вычисления равнодействующей) используют следующий алгоритм :
1) вводят систему координат и записывают проекции всех сил на координатные оси:
F 1 x , F 2 x , . F Nx ,
F 1 y , F 2 y , . F Ny ;
2) вычисляют проекции равнодействующей как алгебраическую сумму проекций сил:
F x = F 1 x + F 2 x + . + F Nx ,
F y = F 1 y + F 2 y + . + F Ny ;
3) модуль равнодействующей вычисляют по формуле
F = F x 2 + F y 2 .
Рассмотрим частные случаи равнодействующей.
Силу взаимодействия тела с горизонтальной опорой , по которой может происходить движение тела, рассчитывают как равнодействующую силы трения и силы реакции опоры (рис. 2.15):
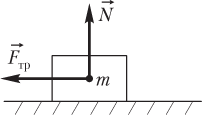
F → вз = F → тр + N → ,
ее модуль вычисляется по формуле
F вз = F тр 2 + N 2 ,
где F → тр — сила трения скольжения или покоя; N → — сила реакции опоры.
Частные случаи равнодействующей:
Силу взаимодействия тела с комбинированной опорой (например, креслом автомобиля, самолета и т.п.) рассчитывают как равнодействующую сил давления на вертикальную и горизонтальную части опоры (рис. 2.16):
F → вз = F → гор + F → верт ,
где F → гор — сила давления, действующая на тело со стороны горизонтальной части опоры (численно равная весу тела); F → верт — сила давления, действующая на тело со стороны вертикальной части опоры (численно равная силе инерции).

Частные случаи равнодействующей:
Равнодействующая силы тяжести и силы Архимеда называется подъемной силой (рис. 2.17):
F → под = F → А + m g → ,
ее модуль вычисляется по формуле
F под = F А − m g ,
где F → А — сила Архимеда (выталкивающая сила); m g → — сила тяжести.

Частные случаи равнодействующей:
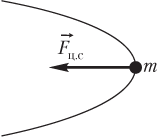
Если под влиянием нескольких сил тело равномерно движется по окружности, то равнодействующая всех приложенных к телу сил является центростремительной силой (рис. 2.18):
F → ц .с = F → 1 + F → 2 + . + F → N .
где F → 1 , F → 2 , . F → N — силы, приложенные к телу.
Модуль центростремительной силы, направленной по радиусу к центру окружности, может быть вычислен по одной из формул:
F ц .с = m v 2 R , F ц .с = m ω 2 R , F ц .с = m v ω ,
где m — масса тела; v — модуль линейной скорости тела; ω — величина угловой скорости; R — радиус окружности.
Пример 21. По дну водоема, наклоненному под углом 60° к горизонту, начинает скользить тело массой 10 кг, полностью находящееся в воде. Найти модуль равнодействующей всех сил, приложенных к телу, если между телом и дном водоема воды нет, а коэффициент трения составляет 0,15.
Решение. Так как между телом и дном водяная прослойка отсутствует, то сила Архимеда на тело не действует.
Искомой величиной является модуль векторной суммы всех сил, приложенных к телу:
F → = F → тр + m g → + N → ,
где N → — сила нормальной реакции опоры; m g → — сила тяжести; F → тр — сила трения. Указанные силы и система координат изображены на рисунке.
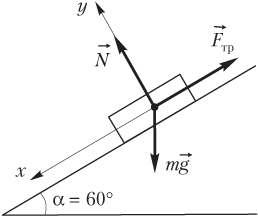
Вычисление модуля результирующей силы F проведем в соответствии с алгоритмом.
1. Определим проекции сил, приложенных к телу, на координатные оси:
проекция силы трения
F тр x = − F тр = − μ N ;
проекция силы тяжести
( m g ) x = m g sin 60 ° = 0,5 3 m g ;
проекция силы реакции опоры
проекция силы трения
проекция силы тяжести
( m g ) y = − m g cos 60 ° = − 0,5 m g ;
проекция силы реакции опоры
где m — масса тела; g — модуль ускорения свободного падения; µ — коэффициент трения.
2. Вычислим проекции равнодействующей на координатные оси, суммируя соответствующие проекции указанных сил:
F x = F тр x + ( m g ) x = − μ N + 0,5 3 m g ;
F y = ( m g ) y + N y = − 0,5 m g + N .
Движение по оси Oy отсутствует, т.е. F y = 0, или, в явном виде:
Отсюда следует, что
что позволяет получить формулу для расчета силы трения:
F тр = μ N = 0,5 μ m g .
3. Искомое значение равнодействующей:
F = F x 2 + F y 2 = | F x | = − 0,5 μ m g + 0,5 3 m g = 0,5 m g ( 3 − μ ) .
F = 0,5 ⋅ 10 ⋅ 10 ( 3 − 0,15 ) = 79 Н.
Пример 22. Тело массой 2,5 кг движется горизонтально под действием силы, равной 45 Н и направленной под углом 30° к горизонту. Определить величину силы взаимодействия тела с поверхностью, если коэффициент трения скольжения равен 0,5.
Решение. Силу взаимодействия тела и опоры найдем как равнодействующую силы трения F → тр и силы нормальной реакции опоры N → :
F → вз = F → тр + N → ,
модуль которой определяется формулой
F вз = F тр 2 + N 2 .
Силы, приложенные к телу, показаны на рисунке.
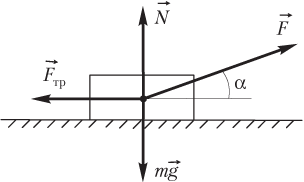
Модуль силы нормальной реакции опоры определяется формулой
N = m g − F sin 30 ° ,
а модуль силы трения скольжения —
где m — масса тела; g — модуль ускорения свободного падения; µ — коэффициент трения; F — модуль силы, вызывающей движение тела.
С учетом выражений для N и F тр формула для расчета искомой силы принимает вид:
F вз = ( μ N ) 2 + N 2 = N μ 2 + 1 = ( m g − F sin 30 ° ) μ 2 + 1 .
F вз = ( 2,5 ⋅ 10 − 45 ⋅ 0,5 ) ( 0,5 ) 2 + 1 ≈ 2,8 Н.
Пример 23. Во сколько раз изменится подъемная сила, если с аэростата сбросить балласт, равный половине его массы? Плотность воздуха считать равной 1,3 кг/м 3 , массу аэростата с балластом — 50 кг. Объем аэростата составляет 50 м 3 .
Решение. Подъемная сила, действующая на аэростат, является равнодействующей силы Архимеда F → А и силы тяжести m g → :
F → под = F → А + m g → ,
модуль которой определяется формулой
где F A = ρ возд gV — модуль силы Архимеда; ρ возд — плотность воздуха; g — модуль ускорения свободного падения; V — объем аэростата; m — масса аэростата (с балластом или без него).
Модуль подъемной силы может быть рассчитан по формулам:
- для аэростата с балластом
F под 1 = ρ возд g V − m 1 g ,
- для аэростата без балласта
F под 2 = ρ возд g V − m 2 g ,
где m 1 — масса аэростата с балластом; m 2 — масса аэростата без балласта.
Искомое отношение модулей подъемных сил составляет
F под 2 F под 1 = ρ возд V − m 2 ρ возд V − m 1 = 1,3 ⋅ 50 − 25 1,3 ⋅ 50 − 50 ≈ 2,7 .
Пример 24. Модуль равнодействующей всех сил, действующих на тело, равен 2,5 Н. Определить в градусах угол между векторами скорости и ускорения, если известно, что модуль скорости остается постоянным.
Решение. Скорость тела не изменяется по величине. Следовательно, тело обладает только нормальной составляющей ускорения a → n ≠ 0 . Такой случай реализуется при равномерном движении тела по окружности.
Равнодействующая всех сил, приложенных к телу, является центростремительной силой и показана на рисунке.
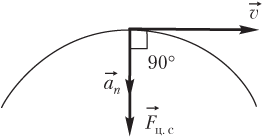
Векторы силы, скорости и ускорения имеют следующие направления:
- центростремительная сила F → ц .с направлена к центру окружности;
- вектор нормального ускорения a → n направлен так же, как и сила;
- вектор скорости v → направлен по касательной к траектории движения тела.
Следовательно, искомый угол между векторами скорости и ускорения равен 90°.
Движение любого твердого тела можно рассматривать как сумму поступательного движения его центра масс и вращательного движения относительно оси, проходящей через его центр масс.
Разобьем твердое тело на элементарные массы mi , тогда его можно представить как систему материальных точек, взаимное расположение которых остается неизменным. Поэтому для описания поступательного движения тела можно использовать закон изменения импульса механической системы
p = $$<sum_^n>$$ mi υ i=m υ C – импульс всех материальных точек твердого тела.
Также можно воспользоваться понятием центра масс и к поступательному движению твердого тела применить закон движения центра масс
Центр масс твердого тела движется как материальная точка, в которой сосредоточена масса тела, и на которую действуют все силы, приложенные к телу. Уравнение (4.1.2) дает возможность установить закон движение центра масс твердого тела, если известна масса тела и действующие на него силы. Если тело движется только поступательно, то это уравнение будет определять не только закон движения центра масс, но и любой другой точки тела.
Момент силы. Векторная величина, равная векторному произведению радиус-вектора r точки, проведенному из полюса в точку приложения силы, на силу F называется моментом силы материальнойточки относительно некоторого центра
Пусть на частицу массой m действует сила F , а ее положение в некоторой инерциальной системе отсчета характеризуется радиус-вектором r относительно начала координат. Тогда момент силы частицы относительно точки O дается уравнением (4.2.1). Направление момента силы M совпадает с направлением поступательного движения правого винта при его вращении от радиус-вектора r к силе F , и он перпендикулярен как вектору r , так и вектору F (рис. 4.2.1). Тогда модуль вектора момента силы равен
где d=r sin α − плечо силы относительно точки O .
Плечо силы − это расстояние, измеряемое по перпендикуляру от оси вращения до линии, вдоль которой действует сила.
Таким образом, модуль момента силы относительно оси, есть скалярная величина, характеризующая вращательное движение действия силы и равная произведению модуля силы F , действующей на твердое тело, на плечо силы d относительно этой оси.
Если на тело действует несколько сил, то суммарный момент этих сил равен векторной сумме моментов всех сил относительно данной оси:
Момент импульса. Векторная величина, равная векторному произведению радиус-вектора r точки, проведенного из центра на ее импульс m υ называется моментом импульса материальной точки относительно некоторого центра
Пусть частица массой m имеет импульс p , а ее положение в некоторой инерциальной системе отсчета характеризуется радиус-вектором r относительно начала координат. Тогда момент импульса частицы относительно точки O дается уравнением (4.2.4). Направление момента импульса совпадает с направлением поступательного движения правого винта при его вращении от радиус-вектора к импульсу p , и он перпендикулярен как вектору r , так и вектору p (рис. 4.2.2). Тогда модуль вектора момента импульса равен
где d − плечо импульса относительно точки O .
Плечо импульса − это расстояние, измеряемое по перпендикуляру от оси вращения до линии, вдоль которой направлен импульс.
Таким образом, модуль вектора момента импульса относительно центра или оси − есть скалярная величина, равная произведению импульса p на плечо импульса d относительно этой оси.
Моментом импульса механической системы относительно некоторого центра называется векторная величина, равная геометрической сумме моментов импульса относительно той же точки всех материальных точек системы
Рассмотрим систему материальных точек массами m1, m2, . mn движущихся со скоростями υ 1, υ 2, . υ n . Пусть на каждую из этих точек действуют: равнодействующие внутренних сил F i 1, F i 2, . F i n , и равнодействующие внешних сил F e 1, F e 2, . F e n .
Умножим каждое уравнение системы (4.3.3) на соответствующий радиус-вектор и получим
Учитывая, что моменты внутренних сил попарно уравновешивают друг друга, и сумма моментов всех внутренних сил для любой системы всегда равна нулю, т. е. $$<sum_^n>$$ M i i=0 , получим основное уравнение динамики вращательного движения относительно точки (или иначе закон изменения момента импульса механической системы ).
закон сохранения момента импульса.
Если момент внешних сил действующих на механическую систему относительно центра оси равен нулю, то момент импульса системы относительно этого центра с течением времени не изменяется.
Можно сказать, что момент силы при вращательном движении является аналогом силы при поступательном движении, момент импульса − аналогом импульса.
Законы изменения и сохранения момента импульса механической системы можно применить и к вращательному движению твердого тела.
Моментом инерции твердого тела относительно данной оси называется физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг этой оси и равная сумме произведений масс всех частиц тела на квадраты их расстояний от той же оси:
Момент инерции зависит только от формы тела и расположения масс относительно оси. [I]=1 кг · м 2 .
Понятие момента инерции было введено при рассмотрении вращения твердого тела. Однако следует иметь в виду, что каждое тело, независимо от того, вращается оно или покоится, обладает определенным моментом инерции относительно любой оси.
Если тело сплошное, то суммирование в выражении (4.5.1) следует заменить на интегрирование:
где R − расстояние от элементарной массы dm до оси вращения.
1) Теорема Штейнера: момент инерции тела Iz относительно произвольной оси равен сумме момента инерции Ic относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела m на квадрат расстояния a между осями:
2) Правило аддитивности: сумма моментов инерции частей системы относительно оси равен моменту инерции системы относительно данной оси:
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):
Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:
Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:
В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:
Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:
Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:
Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.
Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Эта и следующая главы посвящены вращательному движению объектов самой разной природы: от космических станций до пращи. Именно такое движение стало причиной того, что наша планета имеет круглую форму. Если вам известны основные свойства прямолинейного движения и законы Ньютона (они подробно описываются в двух первых частях этой книги), то вы сможете быстро овладеть основами вращательного движения. Даже если вы позабыли некоторые сведения из прежних глав, не беда, ведь к ним всегда можно вернуться в случае необходимости. В этой главе представлены основные понятия вращательного движения: угловая скорость угловое ускорение, тангенциальное ускорение, момент силы и т.п. Однако довольно слов, приступим к делу!
Для такого перехода нужно изменить уравнения, которые использовались ранее для описания прямолинейного движения. В главе 7 уже упоминались некоторые эквиваленты (или аналоги) из мира прямолинейного и вращательного движения.
Вот как выглядят основные формулы прямолинейного движения, которые подробно описываются в главе 3:
По аналогии можно легко вывести основные формулы вращательного движения:
- ( omega=Delta<theta>/Delta ) , где ( omega ) — угловая скорость, ( Delta <theta>) — угол поворота, ( Delta ) — время поворота на угол ( Delta <theta>) ;
- ( alpha=Delta<omega>/Delta ) , где ( alpha ) — угловое ускорение, ( Delta <omega>) — изменение угловой скорости, ( Delta ) — время изменения угловой скорости;
- ( theta=omega_0(t_1-t_0)+<>^1!/!_2a(t_1-t_0)^2 ) , где ( omega_0 ) — это начальная скорость;
- ( omega^2_1-w^2_0=2as ) , где ( omega_1 ) — это конечная скорость.
Разбираемся с параметрами вращательного движения
В физике движение принято разделять на поступательное и вращательное. При поступательном движении любая прямая, связанная с движущимся объектом, остается параллельной самой себе. При вращательном движении все точки тела движутся по окружностям. Тангенциальным движением называется часть вращательного движения, происходящего по касательной к окружности вращения, а радиальным (или нормальным) движением — часть вращательного движения, происходящего перпендикулярно (по нормали) к касательной, т.е. вдоль радиуса окружности.
Параметры прямолинейного поступательного и вращательного движений можно связать следующими формулами:
Допустим, колеса мотоцикла вращаются с угловой скоростью ( omega ) , равной 21,5 ( 21,5pi ) радиан в секунду. С какой скоростью едет мотоцикл? Чтобы дать ответ на этот вопрос, достаточно воспользоваться простой формулой связи линейной и угловой скорости.
Вычисляем линейную скорость вращательного движения
Скорость тангенциального движения материальной точки принято называть линейной скоростью вращательного движения. На рис. 10.1 приведен пример вращения мячика для игры в гольф по окружности с радиусом ( mathbf ) и линейной скоростью ( mathbf ) . Скорость ( mathbf ) является векторной величиной, т.е. обладает величиной и направлением (подробнее о векторах рассказывается в главе 4), перпендикулярным радиус-вектору ( mathbf ) .
Угловая скорость связана с линейной скоростью соотношением ( v=romega ) , которое легко интуитивно понять. При одинаковой угловой скорости, чем дальше материальная точка от центра окружности вращения, тем больше ее линейная скорость.
Попробуем получить уже упомянутую выше формулу связи линейной и угловой скорости ( v=romega ) . Длина окружности ( L ) радиуса ( r ) выражается известной формулой ( L=2pi r ) , а полный угол, который охватывает окружность, равен ( 2pi ) радиан. Соответственно, длина дуги окружности длиной ( Delta s ) , охватывающая угол ( Deltatheta ) , равна:
Из формулы прямолинейного движения
путем подстановки выражения для ( Delta s ) получим:
где ( omega ) — угловая скорость, ( Delta <theta>) — угол поворота, ( Delta ) — время поворота на угол ( Delta <theta>) , то:
Теперь можно легко и просто дать ответ на вопрос, поставленный в конце предыдущего раздела, т.е. определить скорость мотоцикла по угловой скорости вращения его колес. Итак, колеса мотоцикла вращаются с угловой скоростью ( omega ) , равной 21,5 ( pi ) радиан в секунду. Пусть радиус колеса ( r ) равен 40 см, тогда достаточно использовать следующую формулу:
Подставляя в нее значения, получим:
Итак, скорость мотоцикла равна 27 м/с или 97 км/ч.
Вычисляем тангенциальное ускорение
Тангенциальным ускорением называется скорость изменения величины линейной скорости вращательного движения. Эта характеристика вращательного движения очень похожа на линейное ускорение прямолинейного движения (см. главу 3). Например, точки на колесе мотоцикла в момент старта имеют нулевую линейную скорость, а спустя некоторое время после разгона ускоряются до некоторой ненулевой линейной скорости. Как определить это тангенциальное ускорение точки колеса? Переформулируем вопрос: как связать линейное ускорение
где ( a ) — это ускорение, ( Delta v ) — изменение скорости, a ( Delta t ) — время изменения скорости, с угловым ускорением
где ( Deltaomega ) — изменение угловой скорости, ( Delta t ) — время изменения угловой скорости?
Как мы уже знаем, линейная и угловая скорости связаны равенством
Подставим это выражение в предыдущую формулу линейного ускорения:
Поскольку радиус остается постоянным, то его можно вынести за скобки:
Поскольку угловое ускорение ( alpha=Deltaomega/Delta t ) , то:
Итак, получаем следующую формулу связи между линейным и угловым ускорением:
Иначе говоря, тангенциальное ускорение равно произведению радиуса на угловое ускорение.
Вычисляем центростремительное ускорение
Центростремительнным ускорением называется ускорение, необходимое для удержания объекта на круговой орбите вращательного движения. Как связаны угловая скорость и центростремительное ускорение? Формула для центростремительного ускорения уже приводилась ранее (см. главу 7):
Теперь, используя известную формулу связи линейной и угловой скорости ( v=romega ) , получим:
По этой формуле можно определить величину центростремительного ускорения по известной угловой скорости и радиусу. Например, для вычисления центростремительного ускорения Луны, вращающейся вокруг Земли, удобно использовать именно эту формулу.
Луна делает полный оборот вокруг Земли за 28 дней, т.е. за 28 дней Луна проходит ( 2pi ) радиан. Отсюда получаем угловую скорость Луны:
Чтобы получить значение угловой скорости в привычных единицах, следует преобразовать дни в секунды:
После подстановки этого значения в предыдущую формулу получим:
Средний радиус орбиты Луны равен 3,85·10 8 м. Подставляя эти значения угловой скорости и радиуса в формулу центростремительного ускорения, получим:
Зная это ускорение и массу Луны, которая равна 7,35·10 22 кг, можно определить центростремительную силу, необходимую для удержания Луны на ее орбите:
Используем векторы для изучения вращательного движения
В предыдущих разделах этой главы угловая скорость и угловое ускорение рассматривались как скаляры, т.е. как параметры, характеризующиеся только величиной. Однако эти параметры вращательного движения, на самом деле, являются векторами, т.е. они обладают величиной и направлением (см. главу 4). В этом разделе рассматривается величина и направление некоторых параметров вращательного движения.
Определяем направление угловой скорости
Как нам уже известно, вращающееся колесо мотоцикла имеет не только угловую скорость, но и угловое ускорение. Что можно сказать о направлении вектора угловой скорости? Оно не совпадает с направлением линейной тангенциальной скорости, а… перпендикулярно плоскости колеса!
Эта новость всегда приводит к некоторому замешательству среди новичков: угловая скорость ( omega ) , оказывается, направлена вдоль оси вращающегося колеса (рис. 10.2). Во вращающемся колесе единственной неподвижной точкой является его центр. Поэтому начало вектора угловой скорости принято располагать в центре окружности вращения.
Для определения направления вектора угловой скорости ( omega ) часто используют правило правой руки. Если охватить ладонью ось вращения, а пальцы свернуть так, чтобы они указывали на направление тангенциальной скорости, то вытянутый большой палец укажет направление вектора угловой скорости ( omega ) .
Теперь угловую скорость можно использовать так же, как и остальные векторные характеристики движения. Направление вектора угловой скорости можно найти по правилу правой руки, а величину — по приведенной ранее формуле. То, что вектор угловой скорости направлен перпендикулярно плоскости вращательного движения, часто вызывает некоторые трудности у начинающих, но к этому можно быстро привыкнуть.
Определяем направление углового ускорения
Если вектор угловой скорости направлен перпендикулярно плоскости вращательного движения, то куда направлен вектор углового ускорения в случае замедления или ускорения вращения объекта? Как известно (см. предыдущие разделы), угловое ускорение определяется формулой:
где ( alpha ) — угловое ускорение, ( Deltaomega ) — изменение угловой скорости, ( Delta t ) — время изменения угловой скорости.
В векторной форме оно имеет следующий вид:
где ( mathbf <alpha>) — вектор углового ускорения, а ( Deltamathbf <omega>) — изменение вектора угловой скорости. Отсюда ясно, что направление вектора углового ускорения совпадает с направлением изменения вектора угловой скорости.
Если вектор угловой скорости меняется только по величине, то направление вектора углового ускорения параллельно направлению вектора угловой скорости. Если величина угловой скорости растет, то направление вектора углового ускорения совпадает с направлением вектора угловой скорости, как показано на рис. 10.3.
А если величина угловой скорости падает, то направление вектора углового ускорения противоположно направлению вектора угловой скорости, как показано на рис. 10.4.
Поднимаем грузы: момент силы
В физике большое значение имеет не только время, но и место приложения силы. Всем когда-либо приходилось пользоваться рычагом для перемещения тяжелых грузов. Чем длиннее рычаг, тем легче сдвинуть груз. На языке физики применение силы с помощью рычага характеризуется понятием момент силы.
Приложение момента силы неразрывно связано с вращательным движением объектов. Если приложить силу к краю карусели, то карусель начнет вращательное движение. Чем дальше точка приложения силы, тем легче раскрутить карусель до заданной угловой скорости (параметры вращательного движения описываются в главе 1 1 ).
В верхней части рис. 10.5 показаны весы-качели с грузом массы ( m_1 ) на одном конце и грузом большей массы ( m_2=2m_1 ) посередине. Чтобы уравновесить весы-качели, нужно сместить груз с большей массой ( m_2 ) к другому концу весов, как показано в нижней части рис. 10.5. Как известно из опыта, размещение груза в точке вращения весов не приводит к уравновешиванию весов. Чтобы уравновесить весы, нужно сдвинуть груз с большей массой ( m_2=2m_1 ) к другому концу весов на расстояние вдвое меньшее, чем расстояние от точки вращения до второго груза с массой ( m_1 ) .
Знакомимся с формулой момента силы
Для уравновешивания весов важно не только, какая сила используется, но и где она прикладывается. Расстояние от точки приложения силы до точки вращения называется плечом силы.
Предположим, что нам нужно открыть дверь, схематически показанную на рис. 10.6. Как известно из опыта, дверь практически невозможно открыть, если прилагать силу вблизи петель (см. схему А на рис. 10.6). Однако, если приложить силу посередине двери, то открыть ее будет гораздо проще (см. схему Б на рис. 10.6). Наконец, прилагая силу у противоположного края двери по отношению к расположению петель, ее можно открыть с еще меньшим усилием (см. схему В на рис. 10.6).
На рис. 10.6 расстояние от мест расположения петель до точки приложения силы и есть плечо силы. Моментом силы называется произведение прилагаемой силы ( F ) на плечо силы ( l ) :
Момент силы в системе СИ измеряется в Н·м, а в системе СГС — в дин·см (подробнее эти системы единиц измерения описываются в главе 2).
Вернемся к примеру на рис. 10.6, где требуется открыть дверь шириной 1 м с помощью силы величиной 200 Н. В случае А (см. рис. 10.6) плечо силы равно нулю и произведение этого плеча на силу любой величины (включая и силу 200 Н) даст нулевой момент силы. В случае Б (см. рис. 10.6) плечо силы равно половине ширины двери, т.е. плечо силы ( l ) равно 0,5 м и момент силы будет равен:
В случае В (см. рис. 10.6) плечо силы равно ширине двери, т.е. плечо силы ( l ) равно 1 м и момент силы будет равен:
Итак, увеличение вдвое длины плеча при той же силе дает нам такое же увеличение момента силы. До сих пор сила прилагалась перпендикулярно к линии, соединяющей точку приложения силы и точку вращения. А что будет с моментом силы, если дверь будет немного приоткрыта и направление силы уже будет не перпендикулярным?
Разбираемся с направлением приложенной силы и плечом силы
Допустим, что сила приложена не перпендикулярно к поверхности двери, а параллельно, как показано на схеме А на рис. 10.7. Как известно из опыта, таким образом дверь открыть невозможно. Дело в том, что у такой силы нет проекции, которая бы могла вызвать вращательное движение. Точнее говоря, у такой силы нет ненулевого плеча для создания вращательного момента силы.
Размышляем над тем, как создается момент силы
Момент силы из предыдущего примера требуется создавать всегда для открытия двери независимо от того, какую дверь приходится открывать: легкую калитку изгороди или массивную дверь банковского сейфа. Как вычислить необходимый момент силы? Сначала нужно определить плечо сил, а потом умножить его на величину силы.
Однако не всегда все так просто. Посмотрите на схему Б на рис. 10.7. Как видите, сила прилагается под некоторым углом ( theta ) . Как в таком случае определить плечо силы? Если бы угол ( theta ) был прямым, то мы могли бы воспользоваться уже известно нам формулой:
Однако в данном случае угол ( theta ) не является прямым.
В таком случае нужно просто помнить следующее правило: плечом силы называется длина перпендикуляра, опущенного из предполагаемой точки вращения на прямую, относительно которой действует сила.
Попробуем применить это правило определения плеча силы для схемы Б на рис. 10.7. Нужно продлить линию, вдоль которой действует сила, а потом опустить на нее перпендикуляр из точки вращения двери. Из полученного прямоугольного треугольника легко определить искомое плечо силы:
Если угол ( theta ) равен нулю, то никакого момента силы не возникает (см. схему А на рис. 10.7).
Итак, получаем для момента силы для схемы Б на рис. 10.7:
Например, если требуется открыть дверь шириной 1 м с помощью силы величиной 200 Н, приложенной под углом ( theta ) = 45°, то создаваемый момент этой силы будет равен:
Как видите, этот момент силы 140 Н·м меньше, чем момент силы 200 Н·м, созданный под прямым углом на схеме В на рис. 10.6.
Определяем направление момента силы
Учитывая все приведенные выше сведения о моменте силы, у читателя вполне может возникнуть подозрение, что момент силы обладает направлением. И это действительно так. Момент силы является векторной величиной, направление которой определяется по правилу правой руки. Если охватить ладонью ось вращения, а пальцы свернуть так, чтобы они указывали на направление силы, то вытянутый большой палец укажет направление вектора момента силы.
На рис. 10.8 показан пример силы ( mathbf ) с плечом ( mathbf ) и соответствующего вектора момента сил ( mathbf ) .
Уравновешиваем моменты сил
В жизни нам часто приходится сталкиваться с равновесными состояниями. Как равновесное механическое состояние определяется с точки зрения физики? Обычно физики подразумевают под равновесным состоянием объекта то, что он не испытывает никакого ускорения (но может двигаться с постоянной скоростью).
Для поступательного движения равновесное состояние означает, что сумма всех сил, действующих на объект равна нулю:
Иначе говоря, результирующая действующая сила равна нулю.
Вращательное движение также может быть равновесным, если такое движение происходит без углового ускорения, т.е. с постоянной угловой скоростью.
Для вращательного движения равновесное состояние означает, что сумма всех моментов сил, действующих на объект, равна нулю:
Как видите, это условие равновесного вращательного движения аналогично условию равновесного поступательного движения. Условия равновесного вращательного движения удобно использовать для определения момента силы, необходимого для уравновешивания неравномерно вращающегося объекта.
Простой пример: вешаем рекламный плакат
Предположим, что у входа в магазин нужно повесить большой и тяжелый рекламный плакат, как показано на рис. 10.9. Хозяин магазина пытался сделать это и раньше, но у него ничего не выходило, поскольку он использовал очень непрочный болт.
Попробуем определить силу, с которой болт должен удерживать всю конструкцию, показанную на рис. 10.9. Пусть плакат имеет массу 50 кг и висит на шесте 3 м от точки опоры шеста, а массу шеста в данном примере будем считать пренебрежимо малой. Болт находится в 10 см от точки опоры шеста.
Согласно условиям равновесия, сумма всех моментов сил должна быть равна нулю:
где ( mathbf ) — это момент силы со стороны плаката, а ( mathbf ) — это момент силы со стороны болта.
Чему равны упомянутые моменты? Момент силы со стороны плаката можно легко определить по формуле:
где ( m ) = 50 кг — это масса плаката, ( mathbf ) — ускорение свободного падения под действием силы гравитационного притяжения (силы тяжести), ( mmathbf ) — сила тяжести плаката, а ( l_п ) = 3 м — это плечо силы тяжести плаката.
Подставляя значения, получим:
Обратите внимание, что здесь перед ускорением свободного падения под действием силы гравитационного притяжения стоит знак “минус”. Это значит, что вектор ускорения свободного падения направлен вниз, т.е. в сторону, противоположную выбранному направлению оси координат.
Момент силы со стороны болта определяется формулой:
где ( mathbf ) — это искомая сила, с которой болт должен удерживать всю конструкцию, а ( l_б ) = 0,1 м — это ее плечо.
Подставляя полученные выражения для моментов сил в формулу:
Отсюда с помощью простых алгебраических преобразований получим искомую силу:
Как видите сила, с которой болт должен удерживать всю конструкцию, направлена противоположно вектору ускорения свободного падения, т.е. вверх.
Подставляя значения, получим искомый ответ:
Более сложный пример: учитываем силу трения при расчете равновесия
Рассмотрим теперь другую более сложную задачу, в которой для расчета равновесия системы объектов нужно учесть силу трения. Предположим, что работник магазина решил использовать переносную лестницу для монтажа рекламного плаката, как схематически показано на рис. 10.10.
Пусть лестница длиной ( l_л ) = 4 м стоит под углом ( theta ) = 45° к поверхности тротуара, работник имеет массу ( m_р ) = 45 кг и находится на ней на расстоянии ( l_р ) = 3 м от нижнего конца лестницы, лестница имеет массу (m_л ) = 20 кг, а коэффициент трения покоя между поверхностью тротуара и концами лестницы равен ( mu_п ) = 0,7. Вопрос: будет ли такая система объектов находиться в состоянии равновесия? Попросту говоря, достаточной ли будет сила трения, чтобы лестница вместе с рабочим не соскользнула и упала?
Итак, для ответа на этот вопрос нам нужно учесть следующие силы, действующие на лестницу:
- ( mathbf ) — нормальная сила со стороны стены;
- ( mathbf ) — вес рабочего;
- ( mathbf ) — вес лестницы;
- ( mathbf> ) — сила трения между поверхностью тротуара и концами лестницы;
- ( mathbf ) — нормальная сила со стороны тротуара.
Согласно условиям равновесного поступательного движения, сумма всех сил, действующих на лестницу, должна быть равна нулю:
Это значит, что сумма всех сил вдоль горизонтальной оси, а именно нормальной силы со стороны стены ( mathbf ) и силы трения между поверхностью тротуара и концами лестницы ( mathbf> ) , должна быть равна нулю, то есть:
Перефразируя поставленный выше вопрос о достаточности силы трения, получим: выполняется ли условие
Кроме того, сумма всех сил вдоль вертикальной оси, а именно веса рабочего ( mathbf ) , веса лестницы ( mathbf ) и нормальной силы со стороны тротуара ( mathbf ) , должна быть равна нулю, то есть:
Согласно условиям равновесного вращательного движения, также необходимо равенство нулю всех моментов сил, действующих на лестницу:
Пусть предполагаемой точкой вращения является нижний конец лестницы, тогда должна быть равна нулю сумма моментов сил, создаваемых весом рабочего ( mathbf ) , весом лестницы ( mathbf ) и нормальной силой со стороны стены ( mathbf ) :
Поскольку ( L_р=l_р ) , ( L_л=l_л/2 ) (центр тяжести лестницы находится посередине лестницы), ( L_с=l_л ) , ( alpha=360^<circ>-theta ) , ( beta=360^<circ>-theta ) и ( gamma=theta ) , то получим:
Таким образом, мы получили систему из двух уравнений с двумя неизвестными сил ( mathbf ) и ( mathbf ) :
Зададимся вопросом: соблюдается ли условие
Из системы двух уравнений получим:
Итак, остается выяснить, соблюдается ли условие:
После подстановки значений получим:
Поскольку ( mu_т ) = 0,7, то упомянутое условие соблюдается, и лестница с рабочим не упадет.
[spoiler title=”источники:”]
[/spoiler]
