|
Как найти модуль перемещения тела (формула)?
Общая формула для всех видов движения по которой можно найти модуль перемещения выглядит так. s = x-x0, где х0 – начальная координата, х – координата через промежуток времени, за которое совершено перемещение. Для более простых видов перемещения есть частные формулы. Для равномерного прямолинейного движения x = x0 + vt, где м – скорость тела. Для равноускоренного прямолинейного движения x = x0 + v0t + (a t^2)/2. система выбрала этот ответ лучшим
Zolotynka 6 месяцев назад Прежде чем писать/запоминать формулу, давайте разберемся, что представляет собой само понятие перемещения тела – это разница между двумя положениями объекта. Далее: это векторная величина, потому что у нее также есть направление – от начальной позиции к финальной. Формула перемещения выглядит следующим образом: Sx = x – x0. __ Перемещение не обязательно всегда положительно, оно также может быть нулевым или отрицательным. Знаете ответ? |



Вектор скорости и ускорения материальной точки и их модули. Пример решения задач.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора – вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами – единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? “Наверное какой-то жуткий”, подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки – это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора – это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему “механика твердых тел”. А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Радиус вектор материальной точки в начальный момент времени скорость зависит от времени по закону
Разделы
Дополнительно
Задача по физике – 14807
Точка движется, замедляясь, по прямой с ускорением, модуль которого зависит от ее скорости $v$ по закону $a = alpha sqrt$, где $alpha$ – положительная постоянная. В начальный момент скорость точки равна $v_<0>$. Какой путь $s$ она пройдет до остановки? За какое время $tau$ этот путь будет пройден?
Задача по физике – 14808
Твердое тело вращается вокруг неподвижной оси так, что его угловая скорость $omega$ зависит от угла поворота $phi$ по закону $omega = omega_ <0>- b phi$, где $omega_<0>$ и $b$ положительные постоянные. В момент времени $t = 0$ угол поворота $phi = 0$. Найти зависимость от времени : 1) угла поворота; 2) угловой скорости.
Задача по физике – 14809
Частица движется по закону $vec = B sin omega t vec + A sin 2 omega t vec$ [м], где $A, B, omega$ – постоянные. Найти уравнение траектории.
Задача по физике – 14810
Законы движения двух материальных точек имеют вид $vec_ <1>= (2t – 1) vec$ [м], $vec_ <2>=(8 – t) vec$ [м]. В какой момент времени расстояние между точками будет минимальным? Чему оно равно?
Задача по физике – 14811
Частица движется по закону $vec = alpha t vec + ( beta – gamma t ) vec$ [м], где $alpha = 1 м/с, beta = 4 м, gamma = 3 м/с$. Найти уравнение траектории и вектор перемещения за первые три секунды движения.
Задача по физике – 14812
Материальная точка начала движение из начала координат и движется так, что ее скорость зависит от времени по закону $vec_ <1>= ( alpha t^ <2>+ beta t) vec + gamma t^ <3>vec$ [м/с]. Одновременно вторая точка начала движение и движется так, что радиус-вектор зависит от времени по закону $vec_ <2>= delta t^ <3>vec + theta t^ <4>vec$ [м], где $alpha, beta , gamma , delta , theta$ – постоянные. Найти угол $phi$ между ускорениями точек через промежуток времени $tau$ после начала движения.
Задача по физике – 14813
Найти среднюю путевую скорость мотоциклиста, если на прохождение трех участков трассы, длины которых относятся как 3:5:7, он затратил промежутки времени, находящиеся в отношении 5:7:9. Скорость на первом участке пути $v = 100 км/ч$, на последующих участках он также двигался равномерно.
Задача по физике – 14814
Материальная точка движется по закону $vec = (1 – 3t + t^<2>) vec$ [м]. Найти среднюю путевую скорость за три секунды после начала движения.
Задача по физике – 14815
Радиус-вектор частицы меняется по закону $vec = vec < tau>(t – alpha t^<2>)$, где $alpha$ – постоянная, $vec< tau >$ – постоянный вектор. Через какое время после начала движения частица вернется в исходную точку, и какой путь она при этом пройдет?
Задача по физике – 14816
Частица начала движение из начала координат так, что ее скорость меняется по закону $vec = vec_ <0>left (1 – frac < tau>right )$, где $vec_<0>$ – начальная скорость, $v_ <0>= 0,1 м/с, tau = 5 с$. В какие моменты времени частица будет находиться на расстоянии 0,1 м от начала координат?
Задача по физике – 14817
Точка начинает движение из начала координат со скоростью, закон изменения которой представлен в виде $vec = alpha sin left ( frac< pi> <2>t right ) vec + beta cos left ( frac< pi> <2>t right ) vec$ [м/с], где $alpha = 2 beta = pi$ [м/с]. Найти угол между вектором ускорения и радиус-вектором в момент времени $t_ <1>= 1с$.
Задача по физике – 14818
Материальная точка движется прямолинейно с начальной скоростью $vec_<0>$. За какое время она остановится, и какой путь до остановки пройдет, если начнет торможение с ускорением, величина которого изменяется по закону $a = beta sqrt, beta = const, beta > 0 $?
Задача по физике – 14819
Воздушный шар начинает подниматься с поверхности земли с постоянной вертикальной скоростью $v_<0>$. При этом дует горизонтальный ветер, благодаря которому шар приобретает горизонтальную компоненту скорости $v_ = alpha y$, где $alpha$ – постоянная, $y$ – высота подъема. Найти на какое расстояние $s$ по горизонтали будет снесен ветром шар к моменту времени, когда он поднимется на высоту $h$.
Задача по физике – 14820
Твердое тело вращается вокруг неподвижной оси по закону $phi = alpha t – beta t^<3>$ [рад], где $alpha = 6 рад/с, beta = 2 рад/с^<3>$. Найти среднее значение угловой скорости и углового ускорения за промежуток времени от $t = 0$ до остановки.
Задача по физике – 14821
В условиях 14820 задачи найти угловое ускорение в момент остановки тела.
Тема 1.6. Основные понятия кинематики
§1. Кинематика точки. Введение в кинематику.
Кинематикой (от греческого «кинема» — движение) называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение – это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени.
Для определения положения движущегося тела (или точки) в разные моменты времени с телом, по отношению к которому изучается движение, жестко связывают какую-нибудь систему координат, образующую вместе с этим телом систему отсчета.
Тело отсчета – тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел.
Система отсчета – это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1).
Рис.1. Система отчета
Изображать систему отсчета будем в виде трех координатных осей (не показывая тело, с которым они связаны).
Движение тел совершается в пространстве с течением времени. Пространство в механике мы рассматриваем, как трехмерное евклидово пространство.
Время является скалярной, непрерывно изменяющейся величиной. В задачах кинематики время t принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т.е. как функции времени t.
Для решения задач кинематики надо, чтобы изучаемое движение было как-то задано (описано).
Кинематически задать движение или закон движения тела (точки) – значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени.
Основная задача кинематики точки твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение.
Положение тела можно определить с помощью радиус-вектора или с помощью координат.
Радиус-вектор точки М – направленный отрезок прямой, соединяющий начало отсчета О с точкой М (рис. 2).
Координата х точки М – это проекция конца радиуса-вектора точки М на ось Ох. Обычно пользуются прямоугольной системой координат Декарта. В этом случае положение точки М на линии, плоскости и в пространстве определяют соответственно одним (х), двумя (х, у) и тремя (х, у, z) числами – координатами (рис. 3).
Рис.2. Радиус-вектор
Рис.3. Координаты точки М
Материальная точка – тело, размерами которого в данных условиях можно пренебречь.
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом “тело” будем понимать “материальная точка”.
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. Вид траектории зависит от выбора системы отсчета.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Путь s – скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0.Единицы измерения в системе СИ: м (метр).
Перемещение тела за определенный промежуток времени – направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 2):
где и — радиус-векторы тела в эти моменты времени.Единицы измерения в системе СИ: м (метр).
Проекция перемещения на ось Ох: ∆rx =∆х = х-х0, где x0 и x – координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути: ≤s.
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:
Видео-урок “Механическое движение”
§2. Способы задания движения точки
Для задания движения точки можно применять один из следующих трех способов:
1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки.
Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор , проведенный из начала координат О в точку М (рис. 4).
Рис.4. Движение точки М
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t:
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
Геометрическое место концов вектора , т.е. годограф этого вектора, определяет траекторию движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.4), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т.е. знать зависимости
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
3. Естественный способ задания движения точки.
Рис.5. Движение точки М
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.5) Выберем на этой траектории какую-нибудь неподвижную точку О’, которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s, которая равна расстоянию от точки О’ до точки М, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка М перемещается в положения M1, М2. . следовательно, расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость s=f(t).
§3. Вектор скорости точки
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Понятие скорости точки в равномерном прямолинейном движении относится к числу элементарных понятий.
Скорость – мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной.
Единица измерения скорости – м/с. Часто используют и другие единицы, например, км/ч: 1 км/час=1/3,6 м/с.
Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным.
Для равномерно-прямолинейного движения ∆r=v∆t, где v – постоянный вектор скорости.
Из соотношения видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени.
[spoiler title=”источники:”]
http://earthz.ru/solves~981~t1
http://www.sites.google.com/site/tehmehprimizt/lekcii/teoreticeskaa-mehanika/kinematika/osnovnye-ponatia-kinematiki
[/spoiler]
Скорость тела характеризуется направлением и модулем. Иными словами, модуль скорости – это число, которое показывает, насколько стремительно тело передвигается в пространстве. Перемещение полагает метаморфоза координат.

Инструкция
1. Введите систему координат, касательно которой вы будете определять направление и модуль скорости . Если в задаче теснее задана формула зависимости скорости от времени, вводить систему координат не надобно – предполагается, что она теснее есть.
2. По имеющейся функции зависимости скорости от времени дозволено обнаружить значение скорости в всякий момент времени t. Пускай, скажем, v=2t?+5t-3. Если требуется обнаружить модуль скорости в момент времени t=1, примитивно подставьте это значение в уравнение и посчитайте v: v=2+5-3=4.
3. Когда задача требует обнаружить скорость в исходный момент времени, подставьте в функцию t=0. Таким же образом дозволено обнаружить время, подставив вестимую скорость. Так, в конце пути тело остановилось, то есть, его скорость стала равна нулю. Тогда 2t?+5t-3=0. Отсель t=[-5±?(25+24)]/4=[-5±7]/4. Получается, что либо t=-3, либо t=1/2, а от того что время не может быть негативным, остается только t=1/2.
4. Изредка в задачах уравнение скорости дается в завуалированной форме. Скажем, в условии сказано, что тело двигалось равноускоренно с негативным убыстрением -2 м/с?, а в первоначальный момент скорость тела составляла 10 м/с. Негативное убыстрение обозначает, что тело равномерно замедлялось. Из этих условий дозволено составить уравнение для скорости : v=10-2t. С всей секундой скорость будет уменьшаться на 2 м/с, пока тело не остановится. В конце пути скорость обнулится, следственно легко обнаружить всеобщее время движения: 10-2t=0, откуда t=5 секунд. Через 5 секунд позже начала движения тело остановится.
5. Помимо откровенного движения тела, существует еще и движение тела по окружности. В всеобщем случае оно является криволинейным. Тут появляется центростремительное убыстрение, которое связано с линейной скоростью формулой a(c)=v?/R, где R – радиус. Комфортно рассматривать также угловую скорость ?, причем v=?R.
Модуль числа n представляет собой число единичных отрезков от начала координат до точки n. Причем не главно, в какую сторону будет отсчитываться это расстояние – вправо либо налево от нуля.

Инструкция
1. Модуль числа также принято называть безусловной величиной этого числа . Он обозначается короткими вертикальными линиями, проведенными слева и справа от числа . Скажем, модуль числа 15 записывается дальнейшим образом: |15|.
2. Помните, что модуль может быть только позитивным числом либо нулем. Модуль позитивного числа равен самому числу. Модуль нуля равен нулю. То есть для всякого числа n, которое огромнее либо равно нулю, будет объективна дальнейшая формула |n| = n. Скажем, |15| = 15, то есть модуль числа 15 равен 15-ти.
3. Модулем негативного числа будет то же число, но с противоположным знаком. То есть для всякого числа n, которое поменьше нуля, будет объективна формула |n| = -n. Скажем, |-28| = 28. Модуль числа -28 равен 28-ми.
4. Дозволено находить модули не только для целых, но и для дробных чисел. Причем в отношении дробных чисел действуют те же правила. Скажем, |0,25| = 25, то есть модуль числа 0,25 будет равен 0,25. А |-?| = ?, то есть модуль числа -? будет равен ?.
5. При работе с модулями пригодно знать, что модули противоположных чисел неизменно равны друг другу, то есть |n| =|-n|. Это является основным свойством модулей. Скажем, |10| = |-10|. Модуль числа 10 равен 10-ти, верно так же, как модуль числа -10. Помимо того, |a – b| = |b – a|, потому что расстояние от точки a до точки b и расстояние от b до a равны друг другу. Скажем, |25 – 5| = |5 – 25|, то есть |20| = |- 20|.
Для нахождения метаморфозы скорости определитесь с типом движения тела. В случае если движение тела равномерно, изменение скорости равно нулю. Если тело движется с убыстрением, то изменение его скорости в весь момент времени дозволено узнать, если отнять от мгновенной скорости в данный момент времени его исходную скорость.

Вам понадобится
- секундомер, спидометр, радар, рулетка, акселерометр.
Инструкция
1. Определение метаморфозы скорости произвольно движущегося по прямой траекторииС поддержкой спидометра либо радара измерьте скорость тела в начале и конце отрезка пути. После этого от финального итога отнимите первоначальный, это и будет изменение скорости тела.
2. Определение метаморфозы скорости тела, движущегося с ускорениемНайдите убыстрение тела. Используйте акселерометр либо динамометр. Если знаменита масса тела, тогда силу, действующую на тело, поделите на его массу (a=F/m). Позже этого измерьте время, за которое происходил процесс метаморфозы скорости . Дабы обнаружить изменение скорости , умножьте значение убыстрения на время, за которое происходило это изменение (?v=a•t). Если убыстрение измерить в метрах на секунду в квадрате, а время – в секундах, то скорость получится в метрах на секунду. Если нет вероятности замерить время, но вестимо, что скорость менялась на определенном отрезке пути, спидометром либо радаром, измерьте скорость в начале этого отрезка, после этого с поддержкой рулетки либо дальномера измерьте длину этого пути и убыстрение. Любым из вышеописанных способов измерьте убыстрение, которое действовало на тело. Позже этого обнаружьте финальную скорость тела в конце участка пути. Для этого возведите исходную скорость в квадрат, прибавьте к ней произведение длины участка на убыстрение и число 2. Из итога извлеките квадратный корень. Дабы обнаружить изменение скорости , от полученного итога отнимите значение исходной скорости .
3. Определение метаморфозы скорости тела при поворотеЕсли изменилась не только величина, но и направление скорости , то обнаружьте ее изменение через векторную разность исходной и финальной скорости . Для этого измерьте угол между векторами. После этого от суммы квадратов скоростей отнимите удвоенное их произведение, умноженное на косинус угла между ними: v1?+v2?-2v1v2•Cos(?). Из полученного числа извлеките квадратный корень.
Видео по теме
Для определения скорости разных видов движения потребуются различные формулы. Дабы определить скорость равномерного движения, расстояние поделите на время его прохождения. Среднюю скорость движения находите сложением всех отрезков, которое прошло тело, на всеобщее время движения. При равноускоренном движении узнайте убыстрение, с которым двигалось тело, а при свободном падении высоту, с которой оно предисловие движение.

Вам понадобится
- дальномер, секундомер, акселерометр.
Инструкция
1. Скорость равномерного движения и средняя скоростьИзмерьте расстояние с поддержкой дальномера, которое прошло тело, а время, за которое оно его одолело, с поддержкой секундомера. Позже этого поделите расстояние, пройденное телом на время его прохождения, итогом будет скорость равномерного движения (v=S/t). Если тело движется неравномерно, произведите те же измерения и примените ту же формулу – тогда получите среднюю скорость тела. Это значит, что если бы тело по данному отрезку пути двигалось с полученной скоростью, оно было бы в пути время, равное измеренному. Если тело движется по окружности, измерьте ее радиус и время прохождения полного цикла, после этого радиус умножьте на 6,28 и поделите на время (v=6,28•R/t). Во всех случаях итог получится в метрах в секунду. Для перевода в километры в час помножьте его на 3,6.
2. Скорость равноускоренного движенияИзмерьте убыстрение тела с поддержкой акселерометра либо динамометра, если знаменита масса тела. Секундомером замерьте время движения тела и его исходную скорость, если тело не начинает двигаться из состояния покоя. Если же тело двигается из состояния покоя, она равна нулю. Позже этого узнайте скорость тела, прибавив к исходной скорости произведение убыстрения на время (v=v0+at).
3. Скорость вольно падающего телаС поддержкой дальномера измерьте высоту, с которой падает тело в метрах. Дабы узнать скорость, с которой оно долетит до поверхности Земли (без контроля сопротивления воздуха), умножьте высоту на 2 и на число 9,81 (убыстрение свободного падения). Из итога извлеките квадратный корень. Дабы обнаружить скорость тела на всякий высоте, применяйте ту же методологию, только от исходной высоты, отнимайте нынешнюю и полученное значение подставляйте взамен высоты.
Видео по теме
Человек привык воспринимать представление “скорость ” как что-то больше примитивное, чем это есть на самом деле. Подлинно, проносящийся на перекрестке автомобиль движется с определенной скорость ю, в то время как человек стоит и отслеживает за ним. Но если человек находится в движении, то умнее говорить не об безусловной скорости, а об относительной ее величине. Обнаружить относительную скорость дюже легко.

Инструкция
1. Дозволено продолжить рассмотрение темы движущегося на перекрестка на автомобиле. Человек же, стоя на красном свете светофора, стоит и глядит на проезжающий автомобиль. Человек статичен, следственно примем его за систему отсчета. Система отсчета – такая система, касательно которой движется какое-нибудь тело либо другая физическая точка.
2. Возможен, автомобиль движется со скорость ю 50 км/ч. Но, возможен, что человек побежал следом автомобилю (дозволено, скажем, взамен автомобиля представить маршрутку либо проезжающий мимо автобус). Скорость бега человека 12 км/ч. Таким образом, скорость данного механического транспортного средства представится человеку не столь и стремительной, как было прежде, когда он стоял! В этом каждая и суть относительной скорости. Относительная скорость неизменно измеряется касательно подвижной системы отсчета. Таким образом, скорость автомобиля не будет для пешехода 50 км/ч, а 50 – 12 = 38 км/ч.
3. Дозволено разглядеть еще один живой пример. Довольно припомнить всякий из моментов, когда человек, сидя у окна автобуса, отслеживает за проносящимися мимо автомобилями. Подлинно, из окна автобуса их скорость кажется примитивно потрясающей. И это не изумительно, чай, если принять автобус за систему отсчета, то скорость автомобиля и скорость автобуса надобно будет сложить. Возможен, что автобус движется со скорость ю 50 км/ч, а машины 60 км/ч. Тогда 50 + 60 = 110 км/ч. Именно с такой скорость ю эти самые автомобили проносятся мимо автобуса и пассажиров в нем.Эта же скорость будет объективна и действительна и в том случае, если за систему отсчета принять всякий из проезжающих мимо автобусов автомобилей.
Кинематика постигает разные виды движения тела с заданной скоростью, направлением и траекторией. Дабы определить его расположение касательно точки начала пути, надобно обнаружить перемещение тела .

Инструкция
1. Движение тела происходит по некоторой траектории. В случае откровенного движения ею является прямая линия, следственно обнаружить перемещение тела достаточно примитивно: оно равно пройденному пути. В отвратном случае определить его дозволено по координатам исходного и финального расположения в пространстве.
2. Величина перемещения физической точки является векторной, от того что она имеет направление. Следственно, дабы обнаружить ее числовое значение, нужно вычислить модуль вектора, соединяющего точки начала пути и его окончания.
3. Разглядим двухмерное координатное пространство. Пускай тело проделало путь от точки A (x0, y0) до точки B (x, y). Тогда, дабы обнаружить длину вектора АВ, опустите проекции его концов на оси абсцисс и ординат. Геометрически проекции касательно той и иной координатной оси дозволено представить в виде катетов прямоугольного треугольника с длинами:Sx = x – x0;Sy = y – y0, где Sx и Sy – проекции вектора на соответствующих осях.
4. Модуль вектора, т.е. длина перемещения тела , в свою очередь, является гипотенузой этого треугольника, длину которой легко определить по теореме Пифагора. Он равен квадратному корню из суммы квадратов проекций:S = ?(Sx? + Sy?).
5. В трехмерном пространстве:S = ?(Sx? + Sy? + Sz?), где Sz = z – z0.
6. Это формула является всеобщей для всякий разновидности движения. Вектор перемещения владеет несколькими свойствами: • его модуль не может превышать длину пройденного пути;• проекция перемещения может быть как позитивной, так и негативной величиной, в то время как величина пути неизменно огромнее нуля;• в всеобщем случае перемещение не совпадает с траекторией движения тела , а его модуль не равен пути.
7. В частном случае откровенного движения тело перемещается только по одной оси, скажем, оси абсцисс. Тогда длина перемещения равна разности финальной и исходной первой координаты точек:S = x – x0.
От модуля исходной скорости во многом зависят колляции движения тела. Для того дабы обнаружить эту величину, нужно воспользоваться дополнительными измерениями либо данными. Величина модуля исходной скорости может являться основополагающей колляцией, скажем, для огнестрельного оружия.

Вам понадобится
- – рулетка;
- – дальномер;
- – секундомер;
- – акселерометр;
- – спидометр;
- – угломер;
- – хронограф.
Инструкция
1. Вначале определитесь с типом движения. Если оно равномерное, то довольно измерить длину пути, по которому переместилось тело, сделав это рулеткой, дальномером либо иным доступным методом, и поделить это значение на время, за которое это перемещение осуществлялось. От того что движение равномерное, то модуль скорости на протяжении каждого пути будет идентичен, так что полученная скорость будет равна исходной.
2. При равноускоренном откровенном движении измерьте при помощи акселерометра убыстрение тела, а с подмогой секундомера время его движения, спидометром финальную скорость в конце отрезка пути. Обнаружьте значение модуля исходной скорости, отняв от финальной скорости произведение убыстрения на время движения v0=v-a*t. Если незнакомо значение убыстрения, измеряйте расстояние, которое покрыло тело за время t. Сделайте это при помощи рулетки либо дальномера.
3. Зафиксируйте значение финальной скорости. Обнаружьте исходную скорость, отняв от удвоенного значения расстояния S, поделенного на время, значение финальной скорости v, v0=2S/t-v. Когда значение финальной скорости измерить трудно, а убыстрение знаменито, воспользуйтесь иной формулой. Для этого измеряйте перемещение тела, а также время, которое оно было в пути. От значения перемещения отнимите произведение убыстрения на квадрат времени, поделенное на 2, а итог поделите на время, v0=(S-at?/2)/t либо v0=S/t-at/2.
4. Когда тело начинает движение под углом к горизонту, на него воздействует сила тяжести. Для того дабы обнаружить модуль исходной скорости, при помощи угломера замеряйте угол к горизонту, под которым тело начинает двигаться. При помощи рулетки либо дальномера замеряйте расстояние, на котором тело упадет на поверхность земли. Дабы определить модуль исходной скорости, расстояние S поделите на синус удвоенного угла ?. Из полученного итога извлеките квадратный корень, v0=?(S/sin(2?)).
5. Дабы измерить модуль исходной скорости пули, выпущенной из стрелкового оружия, используйте хронограф. Для этого установите его так, как указано в его инструкции, от того что хронографы бывают различных типов. Позже этого сделайте выстрел из оружия, на табло хронографа появится итог. Выстрелите еще несколько раз и возьмите среднее значение показаний хронографа. Это и будет модуль исходной скорости пули, выпущенного из данного типа стрелкового оружия.
В очередной раз меня попросили решить пару задачек по физике, и я вдруг обнаружил, что не могу решить их с ходу. Немного погуглив, я обнаружил, что сайты в топе выдачи содержат сканы одного и того же учебника и не описывают конкретных примеров решений задачи о том, как найти вектор скорости и ускорения материальной точки. По-этому я решил поделиться с миром примером своего решения.
Траектория движения материальной точки через радиус-вектор
Подзабыв этот раздел математики, в моей памяти уравнения движения материальной точки всегда представлялись при помощи знакомой всем нам зависимости y(x) , и взглянув на текст задачи, я немного опешил когда увидел векторы. Оказалось, что существует представление траектории материальной точки при помощи радиус-вектора — вектора, задающего положение точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.

Формула траектория движения материальной точки помимо радиус-вектора описывается так же ортами — единичными векторами i, j , k в нашем случае совпадающими с осями системы координат. И, наконец, рассмотрим пример уравнения траектории материальной точки (в двумерном пространстве):

Что интересного в данном примере? Траектория движения точки задается синусами и косинусами, как вы думаете, как будет выглядеть график в всем нам знакомом представлении y(x) ? «Наверное какой-то жуткий», подумали вы, но все не так сложно как кажется! Попробуем построить траекторию движения материальной точки y(x), если она движется по представленному выше закону:

Здесь я заметил квадрат косинуса, если вы в каком-нибудь примере видите квадрат синуса или косинуса, это значит что нужно применять основное тригонометрическое тождество, что я и сделал (вторая формула) и преобразовал формулу координаты y, чтобы вместо синуса подставить в нее формулу изменения x:

В итоге жуткий закон движения точки оказался обычной параболой, ветви которой направлены вниз. Надеюсь, вы поняли примерный алгоритм построения зависимости y(x) из представления движения через радиус-вектор. Теперь перейдем к нашему главному вопросу: как же найти вектор скорости и ускорения материальной точки, а так же их модули.
Вектор скорости материальной точки

Всем известно, что скорость материальной точки — это величина пройденного пути точкой за единицу времени, то есть производная от формулы закона движения. Чтобы найти вектор скорости нужно взять производную по времени. Давайте рассмотрим конкретный пример нахождения вектора скорости.
Пример нахождения вектора скорости
Имеем закон перемещения материальной точки:

Теперь нужно взять производную от этого многочлена, если вы забыли как это делается, то вот вам таблица производных различных функций. В итоге вектор скорости будет иметь следующий вид:

Все оказалось проще, чем вы думали, теперь найдем вектор ускорения материальной точки по тому же самому закону, представленному выше.
Как найти вектор ускорения материальной точки

Вектор ускорения точки это векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки. Чтобы найти вектор ускорения материальной точки в нашем примере, нужно взять производную, но уже от формулы вектора скорости, представленной чуть выше:

Модуль вектора скорости точки
Теперь найдем модуль вектора скорости материальной точки. Как вы знаете из 9-го класса, модуль вектора — это его длина, в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат. И откуда же из полученного нами выше вектора скорости взять его координаты спросите вы? Все очень просто:

Теперь достаточно только подставить время, указанное в задаче и получить конкретное числовое значение.
Модуль вектора ускорения
Как вы поняли из написанного выше (и из 9-го класса), нахождение модуля вектора ускорения происходит тем же образом, что и модуля вектора скорости: извлекаем корень квадратный из суммы квадратов координат вектора, все просто! Ну и вот вам, конечно же, пример:

Как вы видите, ускорение материальной точки по заданному выше закону не зависит от времени и имеет постоянную величину и направление.
Еще примеры решений задачи нахождения вектора скорости и ускорения
А вот тут вы можете найти примеры решения и других задач по физике на тему «механика твердых тел». А для тех, кто не совсем понял как найти вектор скорости и ускорения, вот вам еще парочка примеров из сети без всяких лишних объяснений, надеюсь, они вам помогут.

Если у вас возникли какие-нибудь вопросы, вы можете задать их в комментариях.
Основываясь на определении скорости, мы можем утверждать, что скорость является вектором. Она непосредственно выражается через вектор-перемещения, отнесенный к промежутку времени, и должна обладать всеми свойствами вектора перемещения.
Направление вектора скорости, так же как направление физически малого вектора перемещения, определяется по чертежу траектории. В этом можно наглядно убедиться на простых примерах.
Если к вращающемуся точильному камню прикоснуться железной пластинкой, то снимаемые им опилки приобретут скорость тех точек камня, к которым прикасалась пластинка, и затем улетят в направлении вектора этой скорости. Все точки камня движутся по окружностям. Во время опыта хорошо видно, что отрывающиеся раскаленные частички-опилки уходят по касательным к этим окружностям, указывая направления векторов скоростей отдельных точек вращающегося точильного камня.
Обратите внимание на то, как расположены выходные трубы у кожуха центробежного водяного насоса или у сепаратора для молока. В этих машинах частицы жидкости заставляют двигаться по окружностям и затем дают им возможность выйти в отверстие, расположенное в направлении вектора той скорости, которую они имеют в момент выхода. Направление вектора скорости в этот момент совпадает с направлением касательной к траектории движения частиц жидкости. И выходная труба тоже направлена по этой касательной.
Точно так же обеспечивают выход частиц в современных ускорителях электронов и протонов при ядерных исследованиях.
Итак, мы убедились, что направление вектора скорости определяется по траектории движения тела. Вектор скорости всегда направлен вдоль касательной к траектории в той точке, через которую проходит движущееся тело.
Для того чтобы определить, в какую сторону вдоль касательной направлен вектор скорости и каков его модуль, нужно обратиться к закону движения. Допустим, что закон движения задан графиком, показанным на рис. 1.54. Возьмем приращение длины пути  соответствующее малому вектору
соответствующее малому вектору  по которому определяется вектор скорости. Вспомним, что
по которому определяется вектор скорости. Вспомним, что  Знак
Знак  указывает
указывает

направление движения по траектории, а следовательно, определяет ориентировку вектора скорости вдоль касательной. Очевидно, что через модуль этого приращения длины пути будет определяться модуль скорости.
Таким образом, модуль вектора скорости и ориентировку вектора скорости вдоль касательной к траектории можно определить из соотношения

Здесь  является алгебраической величиной, знак которой указывает, в какую сторону по касательной к траектории направлен вектор скорости.
является алгебраической величиной, знак которой указывает, в какую сторону по касательной к траектории направлен вектор скорости.
Итак, мы убедились, что модуль вектора скорости может быть найден по графику закона движения. Отношение  определяет угол наклона а касательной на этом графике. Наклон касательной на графике закона движения будет тем больше, чем больше
определяет угол наклона а касательной на этом графике. Наклон касательной на графике закона движения будет тем больше, чем больше  т. е. чем больше в выбранный момент скорость движения.
т. е. чем больше в выбранный момент скорость движения.
Еще раз обратим внимание на то, что для полного определения скорости требуется одновременное знание траектории и закона движения. Чертеж траектории позволяет определить направление скорости, а график закона движения — ее модуль и знак.
Если теперь мы обратимся снова к определению механического движения, то убедимся в том, что после введения понятия скорости для полного описания любого движения больше ничего не требуется. Используя понятия радиус-вектора, вектора перемещения, вектора скорости, длины пути, траектории и закона движения, можно получить ответы на все вопросы, связанные с определением особенностей любого движения. Все эти понятия взаимосвязаны друг с другом, причем знание траектории и закона движения позволяет найти любую из этих величин.
Как найти модуль скорости
Скорость тела характеризуется направлением и модулем. Иными словами, модуль скорости – это число, которое показывает, насколько быстро тело передвигается в пространстве. Перемещение предполагает изменение координат.
Инструкция
Введите систему координат, относительно которой вы будете определять направление и модуль скорости. Если в задаче уже задана формула зависимости скорости от времени, вводить систему координат не нужно – предполагается, что она уже есть.
По имеющейся функции зависимости скорости от времени можно найти значение скорости в любой момент времени t. Пусть, например, v=2t²+5t-3. Если требуется найти модуль скорости в момент времени t=1, просто подставьте это значение в уравнение и посчитайте v: v=2+5-3=4.
Когда задача требует найти скорость в начальный момент времени, подставьте в функцию t=0. Таким же образом можно найти время, подставив известную скорость. Так, в конце пути тело остановилось, то есть, его скорость стала равна нулю. Тогда 2t²+5t-3=0. Отсюда t=[-5±√(25+24)]/4=[-5±7]/4. Получается, что либо t=-3, либо t=1/2, а поскольку время не может быть отрицательным, остается только t=1/2.
Иногда в задачах уравнение скорости дается в завуалированной форме. Например, в условии сказано, что тело двигалось равноускоренно с отрицательным ускорением -2 м/с², а в начальный момент скорость тела составляла 10 м/с. Отрицательное ускорение означает, что тело равномерно замедлялось. Из этих условий можно составить уравнение для скорости: v=10-2t. С каждой секундой скорость будет уменьшаться на 2 м/с, пока тело не остановится. В конце пути скорость обнулится, поэтому легко найти общее время движения: 10-2t=0, откуда t=5 секунд. Через 5 секунд после начала движения тело остановится.
Помимо прямолинейного движения тела, существует еще и движение тела по окружности. В общем случае оно является криволинейным. Здесь возникает центростремительное ускорение, которое связано с линейной скоростью формулой a(c)=v²/R, где R – радиус. Удобно рассматривать также угловую скорость ω, причем v=ωR.
Источники:
- как находить зависимость пути от времени
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.
План урока:
Механическое движение. Система отсчёта. Закон относительности движения
Уравнения движения. Радиус-вектор. Проекция вектора
Траектория. Путь. Перемещение
Равномерное прямолинейное движение: скорость и уравнение движения
Механическое движение. Система отсчёта. Закон относительности движения
Механическим движением в физике называется изменение с течением времени положения тела (или его частей) в пространстве относительно других тел.
То есть, чтобы сказать, что тело или система совершает механическое движение, нам необходимо: 1) наблюдать его во времени; 2) сравнивать его положение с положением какого-то другого тела (относительно этого тела).
Например, пассажир в едущем автомобиле неподвижен относительно кресла, на котором он сидит, но он движется относительно людей, стоящих на автобусной остановке и самой остановки. А сама автобусная остановка неподвижна относительно стоящих людей, ждущих автобус (см. рисунок 1). Однако она движется относительно проезжающих мимо машин. В первом случае наблюдаемым объектом был человек в машине, а точкой отсчета кресло и люди на остановке. Во втором случае наблюдаемой была автобусная остановка, а точками отсчета – люди на остановке и проезжающие мимо машины.

Рисунок 1 – Иллюстрация к примеру
Из примеров можно сделать вывод, что важно, какой именно объект находится под наблюдением и относительно какого объекта – тела отсчета – рассматривается его движение. Отсюда можно сформулировать закон относительности движения: характер движения тела зависит от того, относительно какого объекта мы рассматриваем данное движение.
Тело (или точка) отсчета, связанная с ним система координат и часы, вместе образуют систему отсчета. То есть все сказанное выше можно переформулировать в одно предложение: для наблюдения механического движения важно в какой системе отсчета будет происходить наблюдение.
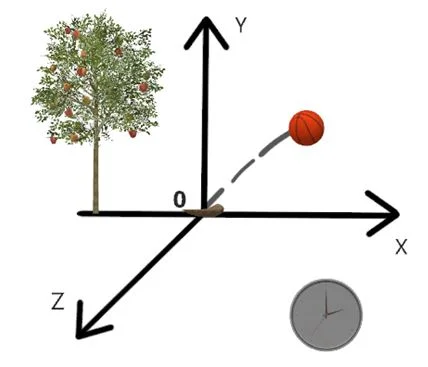
Рисунок 2 – Пример системы отсчета (наблюдаемы объект – летящий мяч, тело отсчета – камень, лежащий в начале координат, система координат и секундомер для отсчета времени)
Однако объекты могут быть очень сложными для наблюдения. Например, автомобиль едет по прямой несколько километров и необходимо описать его движение относительно камня на обочине. Казалось бы, все просто. Но как именно описать движение автомобиля, если корпус его движется по прямой, а колеса совершают вращательные движения.
Для удобства решения подобных задач принято упрощение: если размер и форма тела в данной задаче не играют важной роли для наблюдателя, можно считать это тело за материальную точку.
Материальная точка – это такое тело, размером и формой которого в условиях данной задачи можно пренебречь.
Приведем пример: когда автобус едет из города А в город Б, его можно рассматривать как материальную точку. Когда пассажир идет из одного конца этого автобуса в другой, считать автобус материальной точкой нельзя. В общем случае можно сказать, что тело можно считать материальной точкой, если его размеры значительно меньше расстояния, на которое оно перемещается.
Уравнения движения. Радиус-вектор. Проекция вектора
Для описания движения тела необходимо уметь рассчитывать его положение в каждый момент времени. Как это сделать?
Самый очевидный способ – координатный. Если вернуться к примеру на рисунке 2, можно увидеть, что летящий мяч в каждый момент времени имеет три координаты по осям OX, OY и OZ. Эти координаты являются функциями времени (т.е. они зависят от времени), а значит, их можно записать в виде системы:

Вид этих уравнений будет зависеть от многих вещей: от того, с какой силой бросили мяч в начале, от массы мяча, под каким углом его бросили и так далее. В любом случае, если эти уравнения заданы, можно найти координаты (то есть положение) тела в любой момент времени. Поиск этих уравнений – основная задача кинематики.
Эта система является кинематическими уравнениями движения тела или материальной точки, записанными в координатной форме. Повторим: если вид уравнений движения задан, можно узнать координату движущейся точки в любой момент времени.
В общем случае, координат три, но иногда можно обойтись двумя или даже одной координатой. Например, для описания движения бильярдного шара достаточно двух координат (так как шар не может двигаться вверх и вниз), а для описания движения шарика, катящегося по прямому горизонтальному желобку достаточно одной координаты (шарик не может двигаться вверх-вниз и вправо-влево).
Еще один способ описания движения – векторный.
*Перед дальнейшим прочтением данной статьи желательно вспомнить основную теорию по теме «Векторы» и «Метод координат»
Вектор, проведенный из начала координат к материальной точке, называется радиус-вектором (см. рисунок 3).

Рисунок 3 – Радиус-вектор (серой линией изображены траектория движения материальной точки, r1 и r2* радиус-векторы, проведенные к этой материальной точке в разные моменты времени)
Радиус-вектор проведенный к материальной точке в разные моменты времени будет разным. Значит, его тоже можно представить, как функцию времени:
r = r(t)
Такая функция и будет уравнением движения в векторной форме. Если ее вид задан, можно описать движение тела с той же полнотой, как и при координатной записи.
Еще раз обозначим отличия: при записи уравнения движения в координатной форме в каждый момент времени наблюдающий будет знать три координаты тела; при записи в векторной форме в каждый момент времени известен радиус-вектор (его модуль и направление). Обе записи равносильны.
*На письме векторы обычно обозначаются стрелкой сверху, над величиной. Однако в печатном тексте не всегда удобно нагромождать формулы дополнительными знаками, поэтому в печати векторные величины пишут просто жирным шрифтом. В данной статье далее жирным шрифтом будут написаны только векторные величины.
Покажем, что векторная и координатная записи равносильны. Для этого необходимо вспомнить, как построить проекцию вектора на ось (см. рисунок 4).

Рисунок 4 – Построение проекции вектора на ось
Чтобы построить проекцию вектора на ось, необходимо опустить перпендикуляра из начала и конца вектора на эту ось. Длина получившегося отрезка между проекциями начала и конца вектора, взятая со знаком «+», если вектор а сонаправлен с осью Х, или со знаком «-», если вектор а противонаправлен оси Х, – это и есть искомая проекция.
Если вектор выходит из начала координат, задача облегчается – необходимо опустить перпендикуляр только из конца вектора.
Напоминания из геометрии:
-
два вектора равны, если они параллельны или лежат на одной прямой, сонаправлены, а их модули равны;
-
проекции равных векторов равны.
Рассмотрим пример (см. рисунок 5)

Рисунок 5 – Задача на нахождение проекции векторов
Предлагаем читателю самому подумать, а затем сравнить свои рассуждения с приведенными ниже.
Итак, вектор а: его начала соответствует координате хн=1, а конец хк = 4. Значит ax = хк – хн = 4-1 = 3. Вектор b: его начало лежит в точке хн=2, а конец хк =0. Значит bx = хк – хн = 0-2 = -2.
В двумерном случае, проецировать нужно на две оси, но принцип остается тем же.
Иногда еще нужно находить составляющие компоненты вектора ах и ау. Рассмотрим пример, для простоты возьмем вектор, выходящий из начал координат (см. рисунок 6).
Сумма векторов ах и ау равна а. Модули векторов ах и ау численно равны координатам точек, куда попали перпендикуляры, опущенные из конца вектора а на оси ОХ и ОУ.
Еще следует отметить, что, если известен угол β между вектором а и осью ОХ, воспользовавшись основами тригонометрии, можно найти величины проекций:
ах = а*cos(β);
аy = а*sin(β).
Если бы вектор а совпадал с радиус-вектором какой-нибудь точки, то величины ах и ау совпадали бы с координатами тела по осям ОХ и ОY.
Способ с использованием тригонометрических функций удобен, когда координата конца вектора попадает в нецелое число и опустив перпендикуляр на ось его трудно найти точно. В физических задачах такое часто случается.

Рисунок 6 – Нахождение компонент вектора а
Рассмотрим пример (см. рисунок 7). Модуль вектора r равен 2. Сам вектор направлен под углом в 45 градусов к оси ОХ. Необходимо найти величины проекций (они же координаты) этого вектора на оси ОХ и ОУ.

Рисунок 7 – Задача на нахождение проекций вектора в двумерном пространстве
В общем случае радиус-вектор находится в трехмерном пространстве (см. рисунок 8). Построение проекции осуществляется по тому же принципу, что и в рассмотренных выше примерах. Когда строятся проекции на оси ОХ и ОУ, перпендикуляр сначала опускается на плоскость, в которой лежат оси ОХ и ОУ, а затем точка, в которую упал перпендикуляр к плоскости, проецируется на оси ОХ и ОУ.
Точки, в которые попал перпендикуляры к осям – rx, ry, rz – это и есть координаты x, y, z тела в текущий момент времени.
Следует оговориться, что большинство задач 10-го класса будут ограничиваться двумерным пространством.
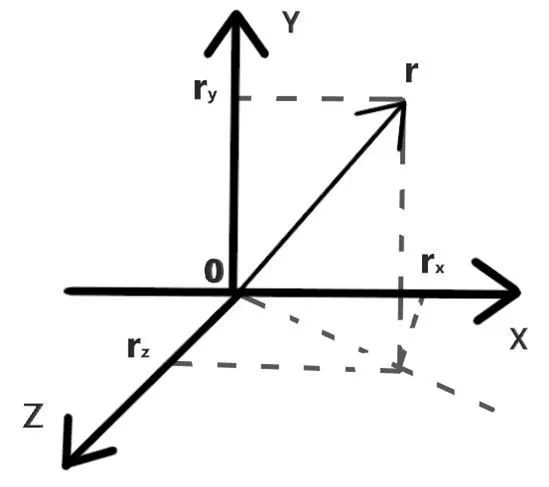
Рисунок 8 – Построение проекций радиус-вектора
Траектория. Путь. Перемещение
Траектория – это линия, вдоль которой движется тело.
Траектория движения может быть прямолинейной, если тело движется по прямой линии, и криволинейной, если тело движется по кривой.
Путь (S), пройденный телом, равен длине траектории.
Перемещение (r)* – это вектор, проведенный из начала пути в конец.
В случае прямолинейного движения путь и модуль перемещения тела совпадают (см. рисунок 9а). В случае криволинейного – путь и перемещение различаются (см. рисунок 9б), так как длина линии движения тела больше длины вектора, соединяющего начало и конец траектории.

Рисунок 9 – Путь (S) и перемещение (r) при прямолинейном (а) и криволинейном (б) движении
*Иногда перемещение так же, как и путь, называют буквой S – (на письме с вектором над ней, при печати – жирным шрифтом, так как это векторная величина). В данной статье, чтобы не путаться, перемещение называется только буквой r. В целом, обозначения равноправны, поэтому при решении задач можно использовать то, которое удобнее. Однако не стоит забывать отмечать, что именно обозначено под той или иной буквой.
Равномерное прямолинейное движение: скорость и уравнение движения
Путь и перемещение при равномерном прямолинейном движении
Прямолинейное равномерное движение уже рассматривалось в курсе физики ранее, однако приведем основные определения.
Прямолинейное движение – это движение по прямой линии. Равномерное движение – такое, в процессе которого тело за равные временные промежутки проходит один и тот же путь. Если объединить эти два определения получится третье:
- равномерное прямолинейное движение – это такое движение, в ходе которого 1) тело совершает движение по прямой линии; 2) за одинаковые временные промежутки проходит одинаковый путь.
Зная определения пути и перемещения, это определение можно упростить: прямолинейное равномерное движение тела – это такое движение, в процессе которого тело за одинаковые временные промежутки совершает равные перемещения.
Важной характеристикой является скорость механического движения. Предположим, что при равномерном прямолинейном движении тело за промежуток времени △t перемещается из точки А в точку Б (см. рисунок 8). Радиус-вектор, проведенный в точку A обозначим r0, а радиус-вектор в точку Б обозначим r1. Изменение радиус-вектора назовем △r – нетрудно заметить, что это есть перемещение тела за время △t.
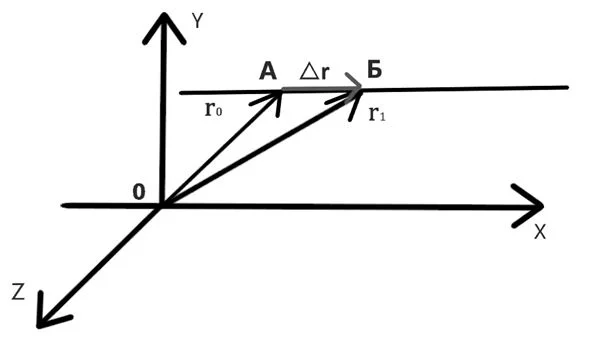
Рисунок 8 – Поиск перемещения тела через радиус-векторы при равномерном прямолинейном движении
Тогда скорость движения (v) будет вычисляться по формуле:

Так как △r – вектор, △t – скаляр, скорость v тоже будет вектором, сонаправленным перемещению.
Если тело начинает двигаться в момент начала отсчета, то △t = t*. Из правила сложения векторов следует, что △r = r1 – r0. Тогда выражение для скорости можно переписать в виде:

Из этого выражения следует:
r1 = r0 + v*t.
Это выражение можно применить к любому произвольно взятому моменту времени, поэтому можно опустить индекс в левой части и переписать:
r = r0 + v*t.
Данное уравнение является уравнением движения при прямолинейном равномерном движении.
*Напоминание: символом △ (дельта) обозначают изменение какой-нибудь величины. Например △t = t – t1, где t – конечный момент времени, t1 – начальный. Если же начальный момент времени совпадает с началом отсчета t1 = 0, то △t = t – 0 = t.
Фактически уравнение равномерного прямолинейного движения означает, что радиус-вектор в произвольный момент времени t можно посчитать, сложив начальный радиус-вектор и приращение v*t.
Найдя проекции радиус-вектора и вектора скорости, можно разложить уравнение движения тела на три составляющие вдоль осей ОX, ОY и ОZ.
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
В этих выражениях r0x, r0y, r0z и vx, vy, vz – это компоненты изначальных векторов r0 и v вдоль осей ОХ, ОY и ОZ соответственно. И теперь можно перейти к скалярному виду:
rx = r0x + vx*t;
ry = r0y + vy*t;
rz = r0z + vz*t.
Стоит отметить, что при проецировании какие-то компоненты вектора могут стать отрицательными, тогда знаки в выражениях поменяются на противоположные.
В рассмотренном выше примере движение происходит только вдоль оси ОХ (остальные координаты не изменяются). На рисунке 9 приведены проекции начальной (х0) и конечной (х1) точки на ось ОХ.

Рисунок 9 – Перемещение тела в координатном представлении
Уравнение координаты (х) движения будет выглядеть:
x(t) = x0 + v*t.
А это уже похоже на знакомую из прошедшего курса физики формулу для нахождения пути:
S(t) = S0 + v*t.
Если точка начала двигаться из начала отсчета S0 = 0, можно переписать эту формулу в виде:
S(t) = v*t.
Отсюда следуют известные уже формулы для нахождения скорости и времени при равномерном прямолинейном движении:

Приведем последний в этой статье пример: известно, что тело движется вдоль оси ОХ, начиная из точки x0 = 3 см. Скорость тела равна v = 5 м/с и направлена вдоль оси ОХ. Необходимо записать уравнение движения по координате х для этого тела.
Итак, для начала приведем все единицы измерения к СИ:
x0 = 3 см = 0,03 м.
Теперь можно записывать уравнение для координаты х:
x(t) = x0 + v*t = 0,03 + 5*t.
Из этого уравнения можно найти координату тела в любой момент времени. Например, через 2 секунды после начала отсчета тело находилось в точке:
x(2) = 0,03 + 5*2 = 10, 03.
А какой путь прошло тело к этому моменту? В начале оно находилось в точке x(2) = 0,03 м, а через 2 секунды оно стало находиться в точке x(2) = 10, 03. Значит за 2 секунды тело прошло:
S = x(2) – x0 = 10, 03 – 0,03 = 10 м.
А если скорость тела была направлена противоположно оси ОХ, как тогда выглядело бы уравнение движения?
Тогда проекция вектора скорости на ось ОХ была бы отрицательной и в уравнении знак перед скоростью поменялся бы на противоположный:
x(t) = x0 – v*t = 0,03 – 5*t.
