Формула модуля равнодействующей силы в физике
Формула модуля равнодействующей силы
На тело могут оказывать действие не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы.
Формула равнодействующей всех сил
Пусть на тело воздействуют в один и тот же момент времени N сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Сила является векторной величиной. Следовательно, силы, действующие на тело, нужно складывать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline{F}$) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
[overline{F}={overline{F}}_1+{overline{F}}_2+dots +{overline{F}}_N=sumlimits^N_{i=1}{{overline{F}}_i} left(1right).]
Формула (1) – это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена также как вектор ускорения тела.
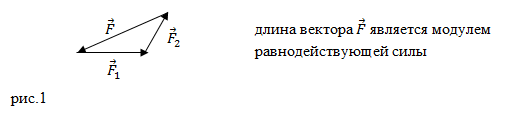
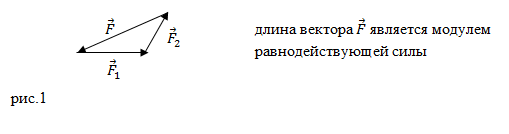
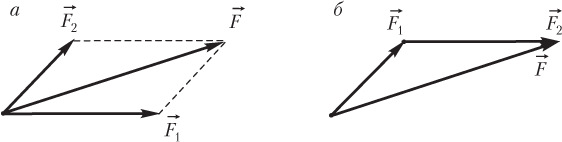
Складывают векторы, используя правило треугольника (рис.1)
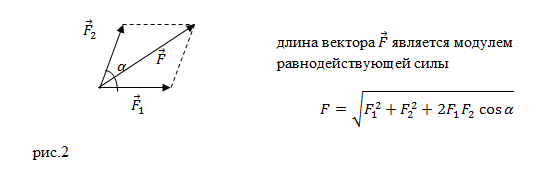
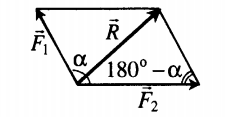
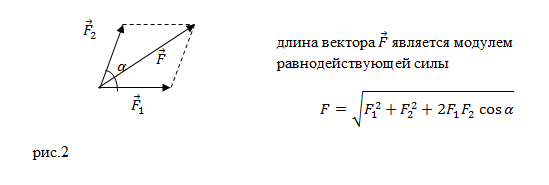
правило параллелограмма (рис.2).
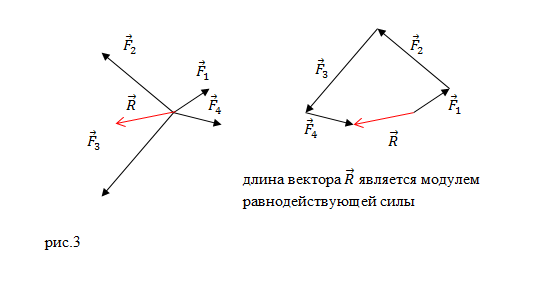
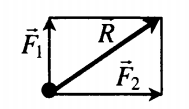
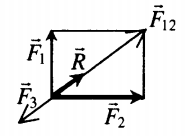
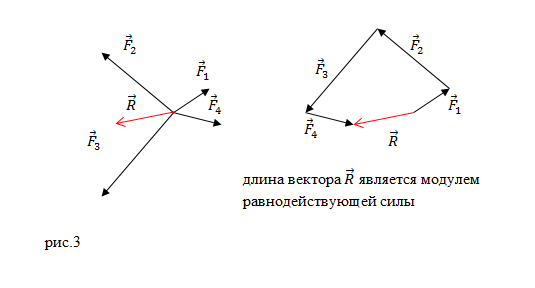
или многоугольника (рис.3):
Второй закон Ньютона и формула модуля равнодействующей
Основной закон динамики поступательного движения в механике можно считать формулой для нахождения модуля равнодействующей силы, приложенной к телу и вызывающей ускорение этого тела:
[overline{F}=sumlimits^N_{i=1}{{overline{F}}_i}=moverline{a}left(2right).]
$overline{F}=0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета тело скорость движения тела.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач с решением
Пример 1
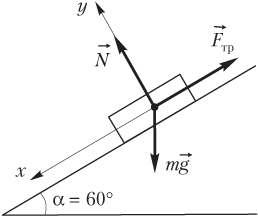
Задание. К материальной точке приложены силы, направленные под углом $alpha =60{}^circ $ друг к другу (рис.4). Чему равен модуль равнодействующей этих сил, если $F_1=40 $Н; $F_2=20 $Н?
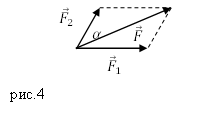
Решение. Силы на рис. 1 сложим, используя правило параллелограмма. Длину равнодействующей силы $overline{F}$ найдем, применяя теорему косинусов:
[F=sqrt{F^2_1+F^2_2+2F_1F_2{cos alpha }} left(1.1right).]
Вычислим модуль равнодействующей силы:
[F=sqrt{{40}^2+{20}^2+2cdot 40cdot 20{cos (60{}^circ ) }}approx 52,92 left(Нright).]
Ответ. $F=52,92$ Н
Пример 2
Задание. Как изменяется модуль равнодействующей силы со временем, если материальная точка массы $m$ перемещается в соответствии с законом: $s=A{cos (omega t)(м) }$, где $s$ – путь пройденный точкой; $A=const;; omega =const?$ Чему равна максимальная величина этой силы?
Решение. По второму закону Ньютона равнодействующая сил, действующих на материальную точку равна:
[overline{F}=moverline{a}left(2.1right).]
Следовательно, модуль силы можно найти как:
[F=ma left(2.2right).]
Ускорение точки будем искать, используя связь между ним и перемещением точки:
[a=frac{d^2s}{dt^2}left(2.3right).]
Первая производная от $s$ по времени равна:
[frac{ds}{dt}=frac{d}{dt}(A{cos (omega t))=-Aomega {rm sin}?(omega t) (м) }left(frac{м}{с}right)(2.4);;]
вторая производная:
[frac{d^2s}{dt^2}=-A{omega }^2{cos left(omega tright) } left(frac{м}{с^2}right)(2.5).]
Подставим полученный в (2.5) результат, в формулу модуля для равнодействующей силы (2.2) запишем как:
[F=mA{omega }^2{cos left(omega tright) }left(Нright).]
Так как косинус может быть меньше или равен единицы, то максимальное значение модуля силы, действующей на точку, составит:
[F_{max}=mA{omega }^2 left(Нright).]
Ответ. $F=mA{omega }^2{cos left(omega tright) }left(Нright); F_{max}=mA{omega }^2 left(Нright)$
Читать дальше: формула периода колебаний математического маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 396 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Три закона Ньютона
Динамика — раздел механики, изучающий причины движения тел и способы определения их ускорения. В нем движение тел описывается с учетом их взаимодействия.
Большой вклад в развитие динамики внес английский ученый Исаак Ньютон. Он первым смог выделить законы движения, которым подчиняются все макроскопические тела. Эти законы называют законами Ньютона, законами механики, законами динамики или законами движения тел.
Внимание! Законы Ньютона нельзя применять к произвольным телам. Они применимы только к точке, обладающей массой — к материальной точке.
Основное утверждение механики
Для описания движения тела можно взять любую систему отсчета. Обычно для этого используется система отсчета, связанная с Землей. Если какое-то тело меняет свою скорость, рядом с ним всегда можно обнаружить другое тело, которое на него действует. Так, если поднять камень и отпустить, он не останется висеть в воздухе, а упадет вниз. Следовательно, на него что-то подействовало. В данном случае сама Земля притянула камень к себе. Отсюда следует основное утверждение механики:
Основное утверждение механики
Изменение скорости (ускорение) тела всегда вызывается воздействием на него других тел.
Согласно утверждению, если на тело не действуют никакие силы, его ускорение будет нулевым, и оно будет либо покоиться, либо двигаться равномерно и прямолинейно (с постоянной скоростью).
Но в нашем мире мы не всегда это наблюдаем. И этому есть объяснение. Если тело покоится, оно действительно не меняет свою скорость. Так, мяч лежит на траве до тех пор, пока его не пнут. После того, как его пнут, он начинает катиться, но затем останавливается. Пока мяч катится, к нему больше не прикасаются. Казалось бы, согласно основному утверждению механики, мяч должен катиться вечно. Но этого не происходит, потому что на мяч действует сила трения, возникающая между его поверхностью и травой.
Основное утверждение механики можно проиллюстрировать в открытом космосе в месте, где сила притяжения космических тел пренебрежимо мала. Если в космосе придать телу скорость и отпустить, оно будет двигаться с такой скоростью по прямой линии до тех пор, пока на него не подействуют другие силы. Ярким примером служат межгалактические звезды, или звезды-изгои. Гравитационно они не связаны ни с одной из галактик, а потому движутся с постоянной скоростью. Так, звезда HE 0437-5439 удаляется от нашей галактики с постоянной скоростью 723 км/с.
Свободное тело — тело, на которое не действуют другие тела. Свободное тело либо покоится, либо движется прямолинейно и равномерно.
Первый закон Ньютона
Исаак Ньютон, изучая движение тел, заметил, что относительно одних систем отсчета свободные тела сохраняют свою скорость, а относительно других — нет. Он разделил их на две большие группы: инерциальные системы отсчета и неинерциальные. В этом кроется первый закон динамики.
Первый закон Ньютона
Существуют такие системы отсчета, называемые инерциальными, относительно которых тела движутся равномерно и прямолинейно или находятся в состоянии покоя, если на них не действуют другие тела или их действие компенсировано.
Примером инерциальной системы отсчета служит система отсчета, связанная с Землей (геоцентрическая). Другой пример — гелиоцентрическая система отсчета (связанная с Солнцем).
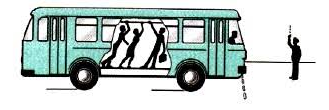
Неинерциальная система отсчета — система отсчета, в которой тела могут менять свою скорость при отсутствии на них действия других тел.
Примером неинерциальной системы отсчета служит автобус. Когда он движется равномерно и прямолинейно, стоящие внутри пассажиры находятся относительно него в состоянии покоя. Но когда автобус останавливается, пассажиры падают вперед, т. е. меняют свою скорость, хотя на них не действуют другие тела.
Второй закон Ньютона
В примере с автобусом видно, что пассажиры стараются сохранить свою скорость относительно Земли — инерциальной системы отсчета. Такое явление называется инерцией.
Инерция — явление, при котором тело сохраняет состояние покоя или равномерного прямолинейного движения.
Инертность — физическое свойство, заключающееся в том, что любое тело оказывает сопротивление изменению его скорости (как по модулю, так и по направлению).
Не все тела одинаково инертны. Вы можете взять мячик и придать ему большое ускорение. Но вы не можете придать такое же ускорение гире, хотя она обладает похожим размером. Но мячик и гиря различаются между собой массой.
Масса — скалярная физическая величина, являющаяся мерой инертности тела. Чем больше масса, тем больше инертность тела.
Масса обозначается буквой m. Единица измерения массы — кг. Прибор для измерения массы — весы.
Чтобы придать одинаковую скорость двум телам с разной инертностью, к телу с большей инертностью придется приложить больше силы. Попробуйте сдвинуть с места стол, а затем — шкаф. Сдвинуть с места стол будет проще.
Если же приложить две одинаковые силы к телам с разной инертностью, будет видно, что тело с меньшей инертностью получает большее ускорение. Если приставить к пружине теннисный шарик, а затем сжать ее и резко отпустить, шарик улетит далеко. Если вместо теннисного шарика взять железный, он лишь откатится на некоторое расстояние.
Описанные выше примеры показывают, что между силой, прикладываемой к телу, и ускорением, которое оно получает в результате прикладывания этой силы, и массой этого тела есть взаимосвязь. Она раскрывается во втором законе Ньютона.
Второй закон Ньютона
Сила, действующая на тело, равна произведению массы этого тела на ускорение, которое сообщает эта сила.
F = ma
где F — сила, которую прикладывают к телу, a — ускорение, которое сообщает эта сила, m — масса тела
Сила — количественная мера действия тел друг на друга, в результате которого тела получают ускорения.
Сила — векторная физическая величина. Обозначается F. Единица измерения — Н (Ньютон). Прибор для измерения силы — динамометр.
Пример №1. Определить, с какой силой действует Земля на яблоко, если, упав с ветки, оно получило ускорение 9,8 м/с2. Масса яблока равна 200 г.
Сначала переведем массу яблока в кг. 200 г = 0,2 кг. Теперь найдем силу, действующую на яблоко со стороны Земли, по второму закону Ньютона:
F = ma = 0,2 ∙ 9,8 = 1,96 (Н)
Равнодействующая сила
Иногда на тело действуют несколько сил. Тогда при описании его движения вводится понятие равнодействующей силы.
Определение
Равнодействующая сила — векторная сумма всех сил, действующих на тело одновременно.
R = F1 + F2 + F3 + …
В этом случае второй закон Ньютона формулируется так:
Второй закон Ньютона через равнодействующие силы
Если на тело действует несколько сил, то их равнодействующая R будет равна произведению массы на ускорение этого тела.
ma = R = F1 + F2 + F3 + …
Правила сложения сил и их проекций
|
Сложение двух сил, направленных вдоль одной прямой в одну сторону |
|
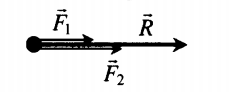 |
Если F1↑↑F2, то:
R = F1 + F2 Равнодействующая сила сонаправлена с обеими силами. |
|
Сложение двух сил, направленных вдоль одной прямой во взаимно противоположных направлениях |
|
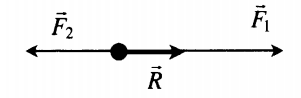 |
Если F1↑↓F2, то:
R = |F1 – F2| Равнодействующая сила направлена в сторону направления большей по модулю силы. |
|
Сложение двух сил, перпендикулярных друг к другу |
|
 |
Если F1 перпендикулярна F2, то равнодействующая сила вычисляется по теореме Пифагора:
|
|
Сложение двух сил, расположенных под углом α друг к другу |
|
 |
Если F1 и F2 расположены под углом α друг к другу, равнодействующая сила вычисляется по теореме косинусов:
|
|
Сложение трех сил |
|
 |
Способ сложения определяется правилами сложения векторов. В данном случае:
|
|
Сложение проекций сил |
|
 |
Проекция на ось ОХ:
F1x + F2x – F3x = 0 Проекция на ось OY: F1y – F2y = 0 |

Третий закон Ньютона
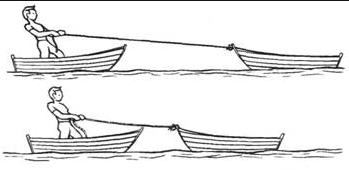
Когда одно тело действует на другое, начинается взаимодействие этих тел. Это значит, если тело А действует на тело В и сообщает ему ускорение, то и тело В действует на тело А, тоже придавая ему ускорение. К примеру, если сжать пружину руками, то руки будут чувствовать сопротивление, оказываемое силой упругости пружины. Если же, находясь в лодке, начать тянуть за веревку вторую лодку, то обе лодки будут двигаться навстречу друг другу. То есть, вы, находясь в своей лодке, тоже будете двигаться навстречу второй лодке.
Иногда на тело действует сразу несколько сил, но тело продолжает покоиться. В этом случае говорят, что силы друг друга компенсируют, то есть их равнодействующая равна нулю.
Две силы независимо от их природы считаются равными по модулю и противоположно направленными, если их одновременное действие на тело не меняет его скорости.
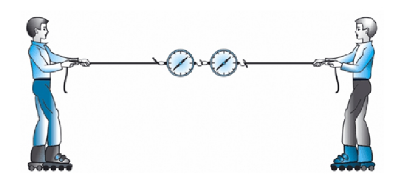
Примером такого явления служит ситуация, когда при перетягивании каната его никто не может перетянуть в свою сторону. Если взять два каната и присоединить между ними два динамометра, а затем начать игру в перетягивание, выяснится, что показания динамометра всегда будут одинаковыми. Это значит, что независимо от масс и придаваемых ускорений два взаимодействующих тела оказывают друг на друга равные по модулю силы. В этом заключается смысл третьего закона Ньютона.
Третий закон Ньютона
Силы, с которыми тела действуют друг на друга, равны по модулям и направлены по одной прямой в противоположные стороны.
FA = –FB
Используя второй закон Ньютона, третий закон механики можно переписать иначе:
m1a1 = –m2a2
Отсюда следует:
Отношение модулей ускорений a1 и a2 взаимодействующих друг с другом тел определяется обратным отношением их масс и совершенно не зависит от характера действующих между ними сил.
Пример №2. Определить ускорение, с которым движется Земля к падающему на нее яблоку. Масса яблока равна 0,2 кг. Ускорение свободного падения принять равной за 10 м/с2. Массу Земли принять равно 6∙1024 кг.
Согласно третьему закону Ньютона модули сил, с которыми взаимодействуют Земли и яблоко, равны. Поэтому:
F1 = F2
Отсюда:
m1a1 = m2a2
Пусть тело 1 будет яблоко, а тело 2 — Земля. Тогда a1 будет равно g. Отсюда ускорение, с которым движется Земля к падающему на нее яблоку, равна:
Задание EF17993
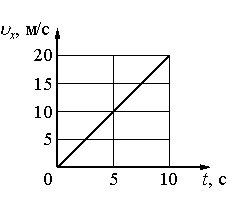 Скорость тела массой 5 кг, движущегося вдоль оси Ох в инерциальной системе отсчёта, изменяется со временем в соответствии с графиком (см. рисунок). Равнодействующая приложенных к телу сил в момент времени t=2,5 с равна…
Скорость тела массой 5 кг, движущегося вдоль оси Ох в инерциальной системе отсчёта, изменяется со временем в соответствии с графиком (см. рисунок). Равнодействующая приложенных к телу сил в момент времени t=2,5 с равна…
а) 2Н
б) 8 Н
в) 10 Н
г) 20 Н
Алгоритм решения
1.Записать исходные данные.
2.Проанализировать задачу.
3.Записать второй закон Ньютона.
4.Определить ускорение по графику проекции скорости от времени.
5.Подставить найденное ускорение в формулу второго закона Ньютона и произвести вычисления.
Решение
Запишем исходные данные:
Так как графиком скорости является прямая, непараллельная ось времени, тело движется с постоянным ускорением. Если ускорение постоянно, равнодействующая сил тоже будет постоянной в любой момент времени. Поэтому нам достаточно использовать координаты любой, более удобной для их определения точки. К примеру, в точке, соответствующей моменту времени 10 с.
Запишем второй закон Ньютона:
F = ma
Ускорение тела определяется как отношение изменения скорости ко времени, в течение которого эта скорость менялась. Согласно графику, за 10 секунд скорость изменилась на 20 м/с. Следовательно, ускорение равно:
a = 20/10 = 2 (м/с2)
Теперь можем вычислить равнодействующую сил:
F = ma = 5∙2 = 10 (Н)
Ответ: в
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18915
Необходимо собрать экспериментальную установку, с помощью которой можно определить коэффициент трения скольжения стали по дереву. Для этого школьник взял стальной брусок с крючком. Какие два предмета из приведённого ниже перечня оборудования необходимо дополнительно использовать для проведения этого эксперимента?
а) деревянная рейка
б) динамометр
в) мензурка
г) пластмассовая рейка
д) линейка
Алгоритм решения
1.Проанализировать задачу. Выяснить, какие предметы необходимы для проведения опыта.
2.Вывести формулу для коэффициента трения.
3.Определить, какую величину нужно измерить, чтобы рассчитать коэффициент трения, и какой прибор для этого нужен.
Решение
Для определения коэффициента трения стали по дереву, нужен не только стальной груз, но и деревянная поверхность. То есть, понадобится деревянная рейка.
Сила трения определяется формулой:
![]()
Отсюда коэффициент трения равен:
Ускорение свободного падения известно. Массу можно измерить на весах, но весов в вариантах ответа нет. Силу трения можно измерить динамометром. Следовательно, для опыта нужны только динамометр и деревянная рейка. Рейка из пластика не понадобится, так как цели расчета коэффициента трения стали по пластику нет. Мензурка используется для определения объема жидкости. В данном опыте она тоже не нужна.
Ответ: аб
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17589
Система отсчёта, связанная с Землёй, считается инерциальной. В этом случае систему отсчёта, связанную с самолётом, можно считать инерциальной, если самолёт движется:
а) равномерно и прямолинейно, набирая высоту
б) с постоянным ускорением по горизонтали
в) равномерно, выполняя поворот
г) по взлетной полосе при взлете
Алгоритм решения
- Сформулировать первый закон Ньютона об инерциальных системах отсчета.
- На основании закона сделать вывод, при каких условиях система отсчета, связанная с самолетом, может считаться инерциальной.
- Проанализировать все 4 ситуации, приведенные в вариантах ответа.
- Выбрать тот вариант, который описывает ситуацию, не противоречащую условию, выведенному в шаге 2.
Решение
Первый закон Ньютона формулируется так:
«Существуют такие системы отсчета, называемые инерциальными, относительно которых тела движутся равномерно и прямолинейно или находятся в состоянии покоя, если на них не действуют другие тела или их действие компенсировано».
Чтобы система отсчета, связанная с самолетом, была инерциальной, она должна быть неподвижной или двигаться относительно Земли — инерциальной системы отсчета — равномерно и прямолинейно.
Когда самолет движется равномерно и прямолинейно, набирая высоту, самолет движется с собственным ускорением, которое компенсируется ускорением свободного падения. И это единственный верный ответ, так как:
- Самолет, двигаясь с постоянным ускорением по горизонтали, движется неравномерно, что противоречит условию.
- Самолет, двигаясь равномерно во время поворота, движется непрямолинейно (с центростремительным ускорением).
- Самолет, двигаясь по взлетной полосе при взлете, движется прямолинейно, но неравномерно, так как он разгоняется из состояния покоя.
Ответ: а
pазбирался: Алиса Никитина | обсудить разбор
Задание EF22791
 Погрешность прямого измерения силы динамометром, на котором висит груз, равна цене деления. Каков вес груза?
Погрешность прямого измерения силы динамометром, на котором висит груз, равна цене деления. Каков вес груза?
Ответ: ( ± ) Н.
Внимание! Записывать ответ следует последовательностью цифр без запятых.
Алгоритм решения
1.Записать исходные данные.
2.Определить цену деления шкалы.
3.Записать значение измерения с учетом погрешности.
Решение
Из условий задачи известно, что погрешность равна цене деления шкалы. Цена деления шкалы определяется отношением разности двух ближайших числовых обозначений на шкале и количеству делений между ними. Возьмем ближайшие значения 1,0 и 1,5. Между ними 5 делений. Следовательно, цена деления шкалы динамометра равна:
Так как погрешность равна цене деления, она также равна 0,1 Н.
Стрелка динамометра показывает 1,1 Н. Следовательно, вес груза равен: 1,1±0,1. Но по условию задачи ответ нужно записать без запятых и прочих знаков. Следовательно, верный ответ: 1101.
Ответ: 1101
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17484
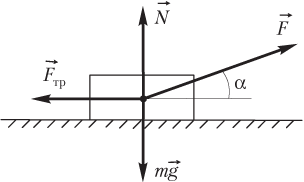
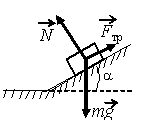 Тело массой m скользит по шероховатой наклонной опоре с углом α к горизонту (см. рисунок). На него действуют 3 силы: сила тяжести mg, сила упругости опоры N и сила трения Fтр. Если скорость тела не меняется, то модуль равнодействующей сил Fтр и mg равен:
Тело массой m скользит по шероховатой наклонной опоре с углом α к горизонту (см. рисунок). На него действуют 3 силы: сила тяжести mg, сила упругости опоры N и сила трения Fтр. Если скорость тела не меняется, то модуль равнодействующей сил Fтр и mg равен:
а) N cosα
б) N
в) N sinα
г) mg + Fтр
Алгоритм решения
- Запись второго закона Ньютона в векторном виде.
- Вывод формулы равнодействующей силы трения и силы тяжести.
- Нахождение модуля равнодействующей силы трения и силы тяжести.
Решение
Записываем второй закон Ньютона в векторном виде с учетом того, сто скорость тела не меняется (ускорение равно 0):
N + mg + Fтр = 0
Отсюда равнодействующая силы трения и силы тяжести равна:
mg + Fтр = –N
Следовательно, равнодействующая силы трения и силы тяжести направлена противоположно силе реакции опоры, но равна ей по модулю. Отсюда:
|mg + Fтр| = N
Ответ: б
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18548
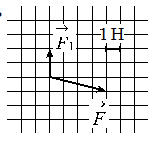 На тело действуют две силы: F1 и F2. По силе F1 и равнодействующей двух сил F = F1 + F2 найдите модуль второй силы (см. рисунок).
На тело действуют две силы: F1 и F2. По силе F1 и равнодействующей двух сил F = F1 + F2 найдите модуль второй силы (см. рисунок).
Алгоритм решения
- Изобразить на рисунке второй вектор с учетом правил сложения векторов.
- Записать геометрическую формулу для расчета модуля вектора по его проекциям.
- Выбрать систему координат и построить проекции второй силы на оси ОХ и ОУ.
- По рисунку определить проекции второй силы на оси.
- Используя полученные данные, применить формулу для расчета вектора по его проекциям.
Решение
Построим вектор второй силы. Его начало должно совпадать с концом вектора первой силы, а его конец — с концов равнодействующей этих сил. Этот вывод следует из сложения векторов правилом треугольника.
Модуль вектора равен корню из суммы квадратов его проекций на оси ОХ и ОУ:
Выберем систему координат и построим проекции второй силы на оси ОХ и ОУ:
Согласно рисунку, проекция второй силы на ось ОХ равна: x = 4 (Н). Ее проекция на ось ОУ равна: y = 3 (Н).
Подставим известные данные в формулу и вычислим модуль вектора второй силы:

Ответ: 5
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 16.3k
Как находить равнодействующую векторов
Формула равнодействующей всех сил
Первый закон Ньютона говорит нам о том, что в инерциальных системах отсчета тела могут изменять скорость только, если на них оказывают воздействие другие тела. При помощи силы ($overline $) выражают взаимное действие тел друг на друга. Сила способна изменить величину и направление скорости тела. $overline $ — это векторная величина, то есть она обладает модулем (величиной) и направлением.
Определение и формула равнодействующей всех сил
В классической динамике основным законом, с помощью которого находят направление и модуль равнодействующей силы является второй закон Ньютона:
На тело могут действовать не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы. Пусть на тело оказывают действие в один и тот же момент времени несколько сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Силы, которые оказывают действие на тело, следует суммировать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline $) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
Формула (2) — это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена как вектор ускорения тела.
Основной закон динамики поступательного движения при наличии нескольких сил
Если на тело действуют несколько сил, тогда второй закон Ньютона записывают как:
$overline =0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета скорость движения тела постоянна.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач на равнодействующую сил
Задание. На материальную точку действуют две силы, направленные под углом $alpha =60<>^circ $ друг к другу. Чему равна равнодействующая этих сил, если $F_1=20 $Н; $F_2=10 $Н?
Решение. Сделаем рисунок.
Силы на рис. 1 складываем по правилу параллелограмма. Длину равнодействующей силы $overline $ можно найти, используя теорему косинусов:
Вычислим модуль равнодействующей силы:
[F=sqrt ^2+ ^2+2cdot 20cdot 10 ^circ ) >>approx 26,5 left(Нright).]
Ответ. $F=26,5$ Н
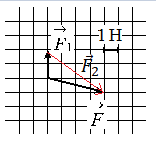
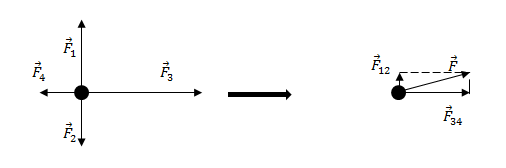
Задание. На материальную точку действуют силы (рис.2). Какова равнодействующая этих сил?
Решение. Равнодействующая сил, приложенных к точке (рис.2) равна:
Найдем равнодействующую сил $ >_1$ и $ >_2$. Эти силы направлены вдоль одной прямой, но в противоположные стороны, следовательно:
Так как $F_1>F_2$, то сила $ >_ $ направлена в туже сторону, что и сила $ >_1$.
Найдем равнодействующую сил $ >_3$ и $ >_4$. Данные силы направлены вдоль одной вертикальной прямой (рис.1), значит:
Направление силы $ >_ $ совпадает с направлением вектора $ >_3$, так как $ >_3> >_4$.
Равнодействующую, которая действует на материальную точку, найдем как:
Силы $ >_ $ и $ >_ $ взаимно перпендикулярны. Найдем длину вектора $overline $ по теореме Пифагора:
Законы сложения сил в механике
При воздействии на одно тело нескольких сил одновременно тело начинает двигаться с ускорением, являющимся векторной суммой ускорений, которые бы возникли под воздействием каждой силы по отдельности. К действующим на тело силам, приложенным к одной точке, применяется правило сложения векторов.
Векторная сумма всех сил, одновременно воздействующих на тело, это сила равнодействующая, которая определяется по правилу векторного сложения сил:
R → = F 1 → + F 2 → + F 3 → + . . . + F n → = ∑ i = 1 n F i → .
Равнодействующая сила действует на тело также, как и сумма всех действующих на него сил.
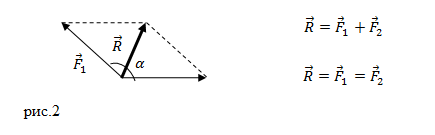
Правило параллелограмма и правило многоугольника
Для сложения 2 -х сил используют правило параллелограмма (рисунок 1 ).
Рисунок 1 . Сложение 2 -х сил по правилу параллелограмма
Выведем формулу модуля равнодействующей силы с помощью теоремы косинусов:
R → = F 1 → 2 + F 2 → 2 + 2 F 1 → 2 F 2 → 2 cos α
При необходимости сложения более 2 -х сил используют правило многоугольника: от конца
1 -й силы необходимо провести вектор, равный и параллельный 2 -й силе; от конца 2 -й силы необходимо провести вектор, равный и параллельный 3 -й силе и т.д.
Рисунок 2 . Сложение сил правилом многоугольника
Конечный вектор, проведенный от точки приложения сил в конец последней силы, по величине и направлению равняется равнодействующей силе. Рисунок 2 наглядно иллюстрирует пример нахождения равнодействующей сил из 4 -х сил: F 1 → , F 2 → , F 3 → , F 4 → . Причем суммируемые векторы совсем необязательно должны быть в одной плоскости.
Результат действия силы на материальную точку будет зависеть только от ее модуля и направления. У твердого тела есть определенные размеры. Потому силы с одинаковыми модулями и направлениями вызывают разные движения твердого тела в зависимости от точки приложения.
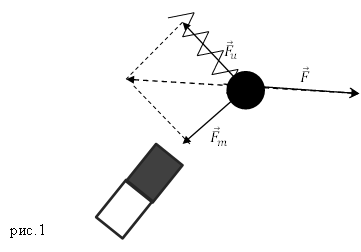
Линией действия силы называют прямую, проходящую через вектор силы.
Рисунок 3 . Сложение сил, приложенных к различным точкам тела
Если силы приложены к различным точкам тела и действуют не параллельно по отношению друг к другу, тогда равнодействующая приложена к точке пересечения линий действия сил (рисунок 3 ). Точка будет находиться в равновесии, если векторная сумма всех сил, действующих на нее, равняется 0 : ∑ i = 1 n F i → = 0 → . В данном случае равняется 0 и сумма проекций данных сил на любую координатную ось.
Разложение вектора силы по направлениям
Разложение сил на две составляющие – это замена одной силы 2 -мя, приложенными в той же точке и производящими на тело такое же действие, как и эта одна сила. Разложение сил осуществляется, как и сложение, правилом параллелограмма.
Задача разложения одной силы (модуль и направление которой заданы) на 2 , приложенные в одной точке и действующие под углом друг к другу, имеет однозначное решение в следующих случаях, когда известны:
- направления 2 -х составляющих сил;
- модуль и направление одной из составляющих сил;
- модули 2 -х составляющих сил.
Необходимо разложить силу F на 2 составляющие, находящиеся в одной плоскости с F и направленные вдоль прямых a и b (рисунок 4 ). Тогда достаточно от конца вектора F провести 2 прямые, параллельные прямым a и b . Отрезок F A и отрезок F B изображают искомые силы.
Рисунок 4 . Разложение вектора силы по направлениям
Второй вариант данной задачи – найти одну из проекций вектора силы по заданным векторам силы и 2 -й проекции (рисунок 5 а ).
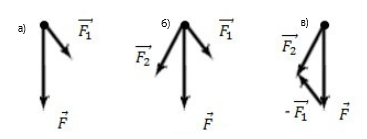
Рисунок 5 . Нахождение проекции вектора силы по заданным векторам
Во втором варианте задачи необходимо построить параллелограмм по диагонали и одной из сторон, как в планиметрии. На рисунке 5 б изображен такой параллелограмм и обозначена искомая составляющая F 2 → силы F → .
Итак, 2 -й способ решения: прибавим к силе силу, равную — F 1 → (рисунок 5 в ). В итоге получаем искомую силу F → .
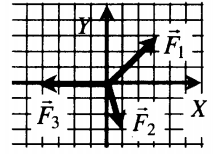
Три силы F 1 → = 1 Н ; F 2 → = 2 Н ; F 3 → = 3 Н приложены к одной точке, находятся в одной плоскости (рисунок 6 а ) и составляют углы с горизонталью α = 0 ° ; β = 60 ° ; γ = 30 ° соответственно. Необходимо найти равнодействующую силу.
Решение
Рисунок 6 . Нахождение равнодействующей силы по заданным векторам
Нарисуем взаимно перпендикулярные оси О Х и O Y таким образом, чтобы ось О Х совпадала с горизонталью, вдоль которой направлена сила F 1 → . Сделаем проекцию данных сил на координатные оси (рисунок 6 б ). Проекции F 2 y и F 2 x отрицательны. Сумма проекций сил на координатную ось О Х равняется проекции на данную ось равнодействующей: F 1 + F 2 cos β — F 3 cos γ = F x = 4 — 3 3 2 ≈ — 0 , 6 Н .
Точно также для проекций на ось O Y : — F 2 sin β + F 3 sin γ = F y = 3 — 2 3 2 ≈ — 0 , 2 Н .
Модуль равнодействующей определим с помощью теоремы Пифагора:
F = F x 2 + F y 2 = 0 , 36 + 0 , 04 ≈ 0 , 64 Н .
Направление равнодействующей найдем при помощи угла между равнодействующей и осью (рисунок 6 в ):
t g φ = F y F x = 3 — 2 3 4 — 3 3 ≈ 0 , 4 .
Сила F = 1 к Н приложена в точке В кронштейна и направлена вертикально вниз (рисунок 7 а ). Необходимо найти составляющие данной силы по направлениям стержней кронштейна. Все необходимые данные отображены на рисунке.
Решение
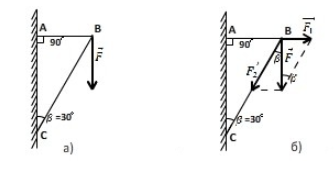
Рисунок 7 . Нахождение составляющих силы F по направлениям стержней кронштейна
Дано:
F = 1 к Н = 1000 Н
Пускай стержни прикручены к стене в точках А и С . На рисунке 7 б изображено разложение силы F → на составляющие вдоль направлений А В и В С . Отсюда понятно, что
F 1 → = F t g β ≈ 577 Н ;
F 2 → = F cos β ≈ 1155 Н .
Ответ: F 1 → = 557 Н ; F 2 → = 1155 Н .
I. Механика
Тестирование онлайн
Определение
Это векторная сумма всех сил, действующих на тело.
Велосипедист наклоняется в сторону поворота. Сила тяжести и сила реакции опоры со стороны земли дают равнодействующую силу, сообщающую центростремительное ускорение, необходимое для движения по окружности
Взаимосвязь со вторым законом Ньютона
Вспомним закон Ньютона:
Равнодействующая сила может быть равна нулю в том случае, когда одна сила компенсируется другой, такой же силой, но противоположной по направлению. В этом случае тело находится в покое или движется равномерно.
|
Сила Архимеда уравновешивается силой тяжести, тело равномерно перемещается в жидкости вниз. |
Сила тяжести уравновешивается силой упругости. Книга покоится Если равнодействующая сила НЕ равна нулю, то тело движется равноускоренно. Собственно именно эта сила является причиной неравномерного движения. Направление равнодействующей силы всегда совпадает по направлению с вектором ускорения. Когда требуется изобразить силы, действующие на тело, при этом тело движется равноускоренно, значит в направлении ускорения действующая сила длиннее противоположной. Если тело движется равномерно или покоится длина векторов сил одинаковая.
|
Модуль равнодействующей силы
Четверг, 24 декабря, 2015
В данной статье рассказано о том, как найти модуль равнодействующей сил, действующих на тело. Репетитор по математике и физике объяснит вам, как найти суммарный вектор равнодействующей сил по правилу параллелограмма, треугольника и многоугольника. Материал разобран на примере решения задачи из ЕГЭ по физике.
Как найти модуль равнодействующей силы
Сила, которая оказывает на материальную точку такое же действие, как и несколько других сил, называется равнодействующей этих сил. Для нахождения вектора равнодействующей силы необходимо геометрически (векторно) сложить все силы, которые действуют на материальную точку.
Напомним, что сложить векторы геометрически можно с помощью одного из трех правил: правила параллелограмма, правила треугольника или правила многоугольника. Разберём каждое из этих правил в отдельности.
1. Правило параллелограмма. На рисунке по правилу параллелограмма складываются векторы  и
и  . Суммарный вектор есть вектор
. Суммарный вектор есть вектор  :
:

Если векторы и не отложены от одной точки, нужно заменить один из векторов равным и отложить его от начала второго вектора, после чего воспользоваться правилом параллелограмма. Например, на рисунке вектор заменен на равный ему вектор  , и
, и  :
:

2. Правило треугольника. На рисунке по правилу треугольника складываются векторы и . В сумме получается вектор  :
:

Если вектор отложен не от конца вектора , нужно заменить его равным и отложенным от конца вектора , после чего воспользоваться правилом треугольника. Например, на рисунке вектор заменен равным ему вектором  , и
, и  :
:

3. Правило многоугольника. Для того, чтобы сложить несколько векторов по правилу параллелограмма, необходимо от произвольной точки  отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке
отложить вектор, равный первому складываемому вектору, от его конца отложить вектор, равный второму складываемому вектору, и так далее. Суммарным будет вектор, проведенный из точки в конец последнего отложенного вектора. На рисунке  :
:

Задача на нахождение модуля равнодействующей силы
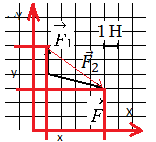
Разберем задачу на нахождение равнодействующей сил на конкретном примере из демонстрационного варианта ЕГЭ по физике 2016 года.

Для нахождения вектора равнодействующей сил найдём геометрическую (векторную) сумму всех изображенных сил, используя правило многоугольника. Упрощенно говоря (не вполне корректно с математической точки зрения), каждый последующий вектор нужно отложить от конца предыдущего. Тогда суммарный вектор будет исходить из точки, из который отложен первоначальный вектор, и приходить в точку, где заканчивается последний вектор:

Требуется найти модуль равнодействующей сил, то есть длину получившегося вектора. Для этого рассмотрим вспомогательный прямоугольный треугольник  :
:

Требуется найти гипотенузу  этого треугольника. «По клеточкам» находим длину катетов:
этого треугольника. «По клеточкам» находим длину катетов:  Н,
Н,  Н. Тогда по теореме Пифагора для этого треугольника получаем:
Н. Тогда по теореме Пифагора для этого треугольника получаем:  Н. То есть искомый модуль равнодействующей сил равен
Н. То есть искомый модуль равнодействующей сил равен  Н.
Н.
Итак, сегодня мы разобрали, как находить модуль равнодействующей силы. Задачи на нахождение модуля равнодействующей силы встречаются в вариантах ЕГЭ по физике. Для решения этих задач необходимо знать определение равнодействующей сил, а также уметь складывать векторы по правилу параллелограмма, треугольника или многоугольника. Стоит немного потренироваться, и вы научитесь решать эти задачи легко и быстро. Удачи вам в подготовке к ЕГЭ по физике!
Репетитор по физике на Юго-Западной
Сергей Валерьевич
Содержание
- Формула равнодействующей всех сил
- Второй закон Ньютона и формула модуля равнодействующей
- Примеры задач с решением
- О причинах изменений
- Сложение сил
- Задачи
- Что мы узнали?
На тело могут оказывать действие не одна, а некоторая совокупность сил. Суммарное действие этих сил характеризуют, используя понятие равнодействующей силы.
Формула равнодействующей всех сил
Пусть на тело воздействуют в один и тот же момент времени N сил. Ускорение тела при этом равно сумме векторов ускорений, которые возникли бы при наличии каждой силы отдельно. Сила является векторной величиной. Следовательно, силы, действующие на тело, нужно складывать в соответствии с правилом сложения векторов. Равнодействующей силой ($overline$) называют векторную сумму всех сил, которые оказывают действие на тело в рассматриваемый момент времени:
Формула (1) — это формула равнодействующей всех сил, приложенных к телу. Равнодействующая сила является искусственной величиной, которую вводят для удобства проведения вычислений. Равнодействующая сила направлена также как вектор ускорения тела.
Складывают векторы, используя правило треугольника (рис.1)
правило параллелограмма (рис.2).
или многоугольника (рис.3):
Второй закон Ньютона и формула модуля равнодействующей
Основной закон динамики поступательного движения в механике можно считать формулой для нахождения модуля равнодействующей силы, приложенной к телу и вызывающей ускорение этого тела:
$overline=0$, если силы, приложенные к телу, взаимно компенсируют друг друга. Тогда в инерциальной системе отсчета тело скорость движения тела.
При изображении сил, действующих на тело, на рисунке, в случае равноускоренного движения, равнодействующую силу, изображают длиннее, чем сумму сил, которые противоположно ей направлены. Если тело перемещается с постоянной скоростью или покоится, длины векторов сил (равнодействующей и сумме остальных сил), одинаковы и направлены они в противоположные стороны.
Когда находят равнодействующую сил, на рисунке изображают все учитываемые в задаче силы. Суммируют эти силы в соответствии с правилами сложения векторов.
Примеры задач с решением
Задание. К материальной точке приложены силы, направленные под углом $alpha =60<>^circ $ друг к другу (рис.4). Чему равен модуль равнодействующей этих сил, если $F_1=40 $Н; $F_2=20 $Н?
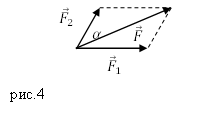
Решение. Силы на рис. 1 сложим, используя правило параллелограмма. Длину равнодействующей силы $overline$ найдем, применяя теорему косинусов:
Вычислим модуль равнодействующей силы:
[F=sqrt<<40>^2+<20>^2+2cdot 40cdot 20<cos (60<>^circ ) >>approx 52,92 left(Н
ight).]
Ответ. $F=52,92$ Н
Задание. Как изменяется модуль равнодействующей силы со временем, если материальная точка массы $m$ перемещается в соответствии с законом: $s=A<cos (omega t)(м) >$, где $s$ — путь пройденный точкой; $A=const;; omega =const?$ Чему равна максимальная величина этой силы?
Решение. По второму закону Ньютона равнодействующая сил, действующих на материальную точку равна:
Следовательно, модуль силы можно найти как:
Ускорение точки будем искать, используя связь между ним и перемещением точки:
Первая производная от $s$ по времени равна:
Подставим полученный в (2.5) результат, в формулу модуля для равнодействующей силы (2.2) запишем как:
Так как косинус может быть меньше или равен единицы, то максимальное значение модуля силы, действующей на точку, составит:
О причинах изменений
Классическая механика разделена на два раздела – кинематику, при помощи уравнений описывающую траекторию движения тел, и динамику, которая разбирается с причинами изменения положения объектов или самих объектов.
Причиной изменений выступает некоторая сила, которая есть мера действия на тело других тел или силовых полей (например, электромагнитное поле или гравитация). К примеру, сила упругости вызывает деформацию тела, сила тяжести – падение тел на Землю.
Сила – это векторная величина, то есть, ее действие – направленное. Модуль силы в общем случае пропорционален некоему коэффициенту (для деформации пружины – это ее жесткость), а также параметрам действия (масса, заряд).
Сложение сил
В случае, когда на тело действует n сил, говорят о равнодействующей силе, а формула второго закона Ньютона принимает вид:
$mvec a = sumlimits_^n vec F_i$.

Рис. 1. Равнодействующая сил.
Поскольку F – векторная величина, сумма сил называется геометрической (или векторной). Такое сложение выполняется по правилу треугольника или параллелограмма, либо по компонентам. Поясним каждый метод на примере. Для этого запишем формулу равнодействующей силы в общем виде:
$F = sumlimits_^n vec F_i$
А силу $F_i$ представим в виде:
Тогда суммой двух сил будет новый вектор $F_ = (F_ + F_, F_ + F_, F_ + F_)$.
Рис. 2. Покомпонентное сложение векторов.
Абсолютное значение равнодействующей можно рассчитать так:
Теперь дадим строгое определение: равнодействующая сила есть векторная сумма всех сил, оказывающих влияние на тело.
Разберем правила треугольника и параллелограмма. Графически это выглядит так:
Рис. 3. Правило треугольника и параллелограмма.
Внешне они кажутся различными, но когда доходит до вычислений, сводятся к нахождению третьей стороны треугольника (или, что тоже самое, диагонали параллелограмма) по теореме косинусов.
Если сил больше двух, иногда удобней пользоваться правилом многоугольника. По своей сути – это всё тот же треугольник, только повторенный на одном рисунке некоторое количество раз. В случае, если по итогу контур получился замкнутым, общее действие сил равно нулю и тело покоится.
Задачи
- На ящик, размещенный в центре декартовой прямоугольной системы координат, действуют две силы: $F_1 = (5, 0)$ и $F_2 = (3, 3)$. Рассчитать равнодействующую двумя методами: по правилу треугольника и при помощи покомпонентного сложения векторов.
Решение
Равнодействующей силой будет векторная сумма $F_1$ и $F_2$.
$vec F = vec F_1 + vec F_2 = (5+3, 0+3) = (8, 3)$
Абсолютное значение равнодействующей силы:
Теперь получим тоже значение при помощи правила треугольника. Для этого сначала найдем абсолютные значения $F_1$ и $F_2$, а также угол между ними.
Угол между ними – 45˚, так как первая сила параллельна оси Оx, а вторая делит первую координатную плоскость пополам, то есть является биссектрисой прямоугольного угла.
Теперь, разместив вектора по правилу треугольника, рассчитаем по теореме косинусов равнодействующую:
- На машину действуют три силы: $F_1 = (-5, 0)$, $F_2 = (-2, 0)$, $F_1 = (7,0)$. Какова их равнодействующая?
Решение
Достаточно сложить иксовые компоненты векторов:
Что мы узнали?
В ходе урока было введено понятие равнодействующей сил и рассмотрены различные методы ее расчета, а также введена запись второго закона Ньютона для общего случая, когда количество сил неограниченно.
Силу, заменяющую собой действие на тело нескольких сил, называют равнодействующей ; равнодействующая сила равна векторной сумме сил, приложенных к данному телу:
F → = F → 1 + F → 2 + . + F → N ,
где F → 1 , F → 2 , . F → N — силы, приложенные к данному телу.
Равнодействующую двух сил удобно находить графически по правилу параллелограмма (рис. 2.14, а ) или треугольника (рис. 2.14, б ).
Для сложения нескольких сил (вычисления равнодействующей) используют следующий алгоритм :
1) вводят систему координат и записывают проекции всех сил на координатные оси:
F 1 x , F 2 x , . F Nx ,
F 1 y , F 2 y , . F Ny ;
2) вычисляют проекции равнодействующей как алгебраическую сумму проекций сил:
F x = F 1 x + F 2 x + . + F Nx ,
F y = F 1 y + F 2 y + . + F Ny ;
3) модуль равнодействующей вычисляют по формуле
F = F x 2 + F y 2 .
Рассмотрим частные случаи равнодействующей.
Силу взаимодействия тела с горизонтальной опорой , по которой может происходить движение тела, рассчитывают как равнодействующую силы трения и силы реакции опоры (рис. 2.15):
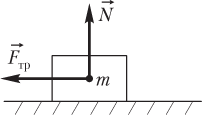
F → вз = F → тр + N → ,
ее модуль вычисляется по формуле
F вз = F тр 2 + N 2 ,
где F → тр — сила трения скольжения или покоя; N → — сила реакции опоры.
Частные случаи равнодействующей:
Силу взаимодействия тела с комбинированной опорой (например, креслом автомобиля, самолета и т.п.) рассчитывают как равнодействующую сил давления на вертикальную и горизонтальную части опоры (рис. 2.16):
F → вз = F → гор + F → верт ,
где F → гор — сила давления, действующая на тело со стороны горизонтальной части опоры (численно равная весу тела); F → верт — сила давления, действующая на тело со стороны вертикальной части опоры (численно равная силе инерции).

Частные случаи равнодействующей:
Равнодействующая силы тяжести и силы Архимеда называется подъемной силой (рис. 2.17):
F → под = F → А + m g → ,
ее модуль вычисляется по формуле
F под = F А − m g ,
где F → А — сила Архимеда (выталкивающая сила); m g → — сила тяжести.

Частные случаи равнодействующей:
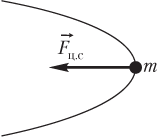
Если под влиянием нескольких сил тело равномерно движется по окружности, то равнодействующая всех приложенных к телу сил является центростремительной силой (рис. 2.18):
F → ц .с = F → 1 + F → 2 + . + F → N .
где F → 1 , F → 2 , . F → N — силы, приложенные к телу.
Модуль центростремительной силы, направленной по радиусу к центру окружности, может быть вычислен по одной из формул:
F ц .с = m v 2 R , F ц .с = m ω 2 R , F ц .с = m v ω ,
где m — масса тела; v — модуль линейной скорости тела; ω — величина угловой скорости; R — радиус окружности.
Пример 21. По дну водоема, наклоненному под углом 60° к горизонту, начинает скользить тело массой 10 кг, полностью находящееся в воде. Найти модуль равнодействующей всех сил, приложенных к телу, если между телом и дном водоема воды нет, а коэффициент трения составляет 0,15.
Решение. Так как между телом и дном водяная прослойка отсутствует, то сила Архимеда на тело не действует.
Искомой величиной является модуль векторной суммы всех сил, приложенных к телу:
F → = F → тр + m g → + N → ,
где N → — сила нормальной реакции опоры; m g → — сила тяжести; F → тр — сила трения. Указанные силы и система координат изображены на рисунке.
Вычисление модуля результирующей силы F проведем в соответствии с алгоритмом.
1. Определим проекции сил, приложенных к телу, на координатные оси:
проекция силы трения
F тр x = − F тр = − μ N ;
проекция силы тяжести
( m g ) x = m g sin 60 ° = 0,5 3 m g ;
проекция силы реакции опоры
проекция силы трения
проекция силы тяжести
( m g ) y = − m g cos 60 ° = − 0,5 m g ;
проекция силы реакции опоры
где m — масса тела; g — модуль ускорения свободного падения; µ — коэффициент трения.
2. Вычислим проекции равнодействующей на координатные оси, суммируя соответствующие проекции указанных сил:
F x = F тр x + ( m g ) x = − μ N + 0,5 3 m g ;
F y = ( m g ) y + N y = − 0,5 m g + N .
Движение по оси Oy отсутствует, т.е. F y = 0, или, в явном виде:
Отсюда следует, что
что позволяет получить формулу для расчета силы трения:
F тр = μ N = 0,5 μ m g .
3. Искомое значение равнодействующей:
F = F x 2 + F y 2 = | F x | = − 0,5 μ m g + 0,5 3 m g = 0,5 m g ( 3 − μ ) .
F = 0,5 ⋅ 10 ⋅ 10 ( 3 − 0,15 ) = 79 Н.
Пример 22. Тело массой 2,5 кг движется горизонтально под действием силы, равной 45 Н и направленной под углом 30° к горизонту. Определить величину силы взаимодействия тела с поверхностью, если коэффициент трения скольжения равен 0,5.
Решение. Силу взаимодействия тела и опоры найдем как равнодействующую силы трения F → тр и силы нормальной реакции опоры N → :
F → вз = F → тр + N → ,
модуль которой определяется формулой
F вз = F тр 2 + N 2 .
Силы, приложенные к телу, показаны на рисунке.
Модуль силы нормальной реакции опоры определяется формулой
N = m g − F sin 30 ° ,
а модуль силы трения скольжения —
где m — масса тела; g — модуль ускорения свободного падения; µ — коэффициент трения; F — модуль силы, вызывающей движение тела.
С учетом выражений для N и F тр формула для расчета искомой силы принимает вид:
F вз = ( μ N ) 2 + N 2 = N μ 2 + 1 = ( m g − F sin 30 ° ) μ 2 + 1 .
F вз = ( 2,5 ⋅ 10 − 45 ⋅ 0,5 ) ( 0,5 ) 2 + 1 ≈ 2,8 Н.
Пример 23. Во сколько раз изменится подъемная сила, если с аэростата сбросить балласт, равный половине его массы? Плотность воздуха считать равной 1,3 кг/м 3 , массу аэростата с балластом — 50 кг. Объем аэростата составляет 50 м 3 .
Решение. Подъемная сила, действующая на аэростат, является равнодействующей силы Архимеда F → А и силы тяжести m g → :
F → под = F → А + m g → ,
модуль которой определяется формулой
где F A = ρ возд gV — модуль силы Архимеда; ρ возд — плотность воздуха; g — модуль ускорения свободного падения; V — объем аэростата; m — масса аэростата (с балластом или без него).
Модуль подъемной силы может быть рассчитан по формулам:
- для аэростата с балластом
F под 1 = ρ возд g V − m 1 g ,
- для аэростата без балласта
F под 2 = ρ возд g V − m 2 g ,
где m 1 — масса аэростата с балластом; m 2 — масса аэростата без балласта.
Искомое отношение модулей подъемных сил составляет
F под 2 F под 1 = ρ возд V − m 2 ρ возд V − m 1 = 1,3 ⋅ 50 − 25 1,3 ⋅ 50 − 50 ≈ 2,7 .
Пример 24. Модуль равнодействующей всех сил, действующих на тело, равен 2,5 Н. Определить в градусах угол между векторами скорости и ускорения, если известно, что модуль скорости остается постоянным.
Решение. Скорость тела не изменяется по величине. Следовательно, тело обладает только нормальной составляющей ускорения a → n ≠ 0 . Такой случай реализуется при равномерном движении тела по окружности.
Равнодействующая всех сил, приложенных к телу, является центростремительной силой и показана на рисунке.
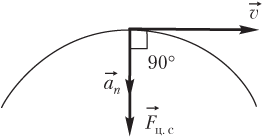
Векторы силы, скорости и ускорения имеют следующие направления:
- центростремительная сила F → ц .с направлена к центру окружности;
- вектор нормального ускорения a → n направлен так же, как и сила;
- вектор скорости v → направлен по касательной к траектории движения тела.
Следовательно, искомый угол между векторами скорости и ускорения равен 90°.
