| Момент импульса | |
|---|---|
 |
|
| Размерность | L2MT−1 |
| Единицы измерения | |
| СИ | м2·кг/с |
| СГС | см2·г/с |
| Примечания | |
| псевдовектор |
Моме́нт и́мпульса (момент импульса относительно точки, также: кинетический момент, угловой момент, орбитальный момент, момент количества движения) — физическая величина, характеризующая количество вращательного движения и зависящая от того, сколько массы вращается, как она распределена в пространстве и с какой угловой скоростью происходит вращение[1].
Для одной материальной точки момент импульса равен векторному произведению радиус-вектора точки на её импульс, для системы точек — сумме таких произведений. Стандартное обозначение: 
Момент импульса замкнутой системы сохраняется. Он является одним из трёх аддитивных (энергия, импульс, момент импульса) интегралов движения. При наличии внешних сил производная момента импульса по времени равна моменту сил (относительно того же начала O).
Основное использование понятия момента импульса относится к задачам, связанным с реальным вращением (особенно при наличии центральной или осевой симметрии; тогда О обычно выбирается в центре или на оси). Но величина
В случае вращения твёрдого тела вокруг фиксированной оси часто используется не сам момент импульса, а его проекция 
Понятие момента импульса было изначально введено в классической механике, но имеет обобщения в квантовой механике и электродинамике.
Момент импульса в классической механике[править | править код]

Связь между силой F, моментом силы τ, импульсом 

Определение[править | править код]
Момент импульса
,
где 

Из определения момента импульса следует его аддитивность: для системы, состоящей из нескольких материальных точек, выполняется
.
Количество частиц может быть бесконечным, например в случае твёрдого тела с распределённой массой.
Так как момент импульса задаётся векторным произведением, он является псевдовектором, перпендикулярным обоим векторам
Момент импульса можно вычислить относительно любого начала отсчета O (получающиеся при этом разные значения
Выбор точки O иногда связан с характером задачи. Так, при рассмотрении орбитального движения планеты вокруг Солнца за начало отсчёта естественно взять Солнце, а при анализе её же собственного вращения — центр этой планеты. Естественно, получатся два разных момента импульса: 

Вычисление в общем случае[править | править код]
Если имеется материальная точка массой 


.
Чтобы рассчитать момент импульса тела, его надо разбить на бесконечно малые кусочки 

.
На практике
.
Если считать, что 
Случай фиксированной оси[править | править код]
Важным случаем использования понятия «момент импульса» является движение вокруг неизменной оси. В такой ситуации часто рассматривают не сам момент импульса (псевдовектор), а его проекцию на ось как псевдоскаляр, знак которого зависит от направления вращения:
.
Параллельность-перпендикулярность (




.
Если при этом все точки тела движутся по окружностям (вращаются) с одинаковой угловой скоростью 

или
.
Величину 
Для абсолютно твёрдого тела, величина последнего интеграла называется моментом инерции относительно оси вращения и обозначается 


Сохранение момента импульса[править | править код]
Закон сохранения момента импульса: суммарный момент импульса относительно любой неподвижной точки для замкнутой системы остается постоянным со временем.
Производная момента импульса по времени есть момент силы:
,
Таким образом, требование замкнутости системы может быть ослаблено до требования равенства нулю главного (суммарного по всем частицам 
,
где 
По теореме Нётер закон сохранения момента импульса следует из изотропии пространства, то есть из инвариантности пространства по отношению к повороту на произвольный угол. При повороте на произвольный бесконечно малый угол 



С учётом 


Теперь, пользуясь свойством смешанного произведения, совершим циклическую перестановку векторов, в результате чего получим, вынося общий множитель:

где 


Смежные понятия[править | править код]
При рассмотрении задач, связанных с вращением, фигурируют понятия, частично упоминавшиеся выше:
- момент импульса относительно оси (термин состоит из четырёх слов) — проекция момента импульса на ось;
- момент инерции твёрдого тела (см. также моменты инерции некоторых тел);
- момент силы (он же: крутящий момент, вращательный момент, вертящий момент);
- импульс момента силы
(единица измерения — Н·м·с) — мера воздействия момента силы относительно данной оси за данный промежуток времени (во вращательном движении).
Несмотря на созвучность с «моментом импульса», эти понятия не синонимичны термину «момент импульса» и несут самостоятельный смысл.
Момент импульса в электродинамике[править | править код]
При описании движения заряженной частицы в электромагнитном поле канонический импульс 

где 



где 

Момент импульса в квантовой механике[править | править код]
Оператор момента[править | править код]
В квантовой механике момент импульса квантуется, то есть он может изменяться только по «квантовым уровням» между точно определёнными значениями. Проекция на любую ось момента импульса частиц, обусловленного их пространственным движением, должна быть целым числом, умноженным на 


Эксперименты показывают, что большинство частиц имеют постоянный внутренний момент импульса, который не зависит от их движения через пространство. Этот спиновый момент импульса всегда кратен 
В классическом определении момент импульса зависит от 6 переменных 





Математически полный момент импульса в квантовой механике определяется как оператор физической величины из суммы двух частей, связанных с пространственным движением — в атомной физике такой момент называют орбитальным, и внутренним спином частицы — соответственно, спиновым. Первый оператор действует на пространственные зависимости волновой функции:
,
где 

,
где 
,
где 
и даже более важные подстановки с гамильтонианом частицы без заряда и спина:
.
Симметрия вращения[править | править код]
Операторы момента импульса обычно встречаются при решении задач сферической симметрии в сферических координатах. Тогда момент импульса в пространственном отображении:

Когда находят собственные значения этого оператора, получают следующее:


где 

— сферические функции.

Примечания[править | править код]
- ↑ Pivarski, Jim Spin. Symmetry Magazine (март 2013). Дата обращения: 28 апреля 2014. Архивировано 15 апреля 2014 года.
- ↑ [Информация с сайта Нобелевского комитета (англ.). Дата обращения: 3 ноября 2017. Архивировано 18 мая 2008 года. Информация с сайта Нобелевского комитета (англ.)]
Литература[править | править код]
- Биденхарн Л., Лаук Дж. Угловой момент в квантовой физике. Теория и приложения. — М.: Мир, 1984. — Т. 1. — 302 с.
- Блохинцев Д. И. Основы квантовой механики. — М.: Наука, 1976. — 664 с.
- Боум А. Квантовая механика: основы и приложения. — М.: Мир, 1990. — 720 с.
- Варшалович Д. А., Москалев А. Н., Херсонский В. К. Квантовая теория углового момента. — Л.: Наука, 1975. — 441 с.
- Зар Р. Теория углового момента. О пространственных эффектах в физике и химии. — М.: Мир, 1993. — 352 с.
Моментом импульса материальной точки
аотносительно неподвижной точки 0
называется физическая величина, равная
векторному произведению
![]() ,
,
(20)
где
![]() – радиус-вектор проведенный из точки 0
– радиус-вектор проведенный из точки 0
в точку а,![]() – импульс материальной точки.
– импульс материальной точки.

Рис.9.
Направление вектора
![]() совпадает с направлением поступательного
совпадает с направлением поступательного
движения правого винта при его вращении
от![]() к
к![]() .
.
Модуль вектора момента импульса
![]() (21)
(21)
где
![]() – угол между векторами
– угол между векторами![]() и
и![]() ,
,![]() – плечо вектора
– плечо вектора![]() относительно точки 0. Моментом импульса
относительно точки 0. Моментом импульса
системы материальных точек относительно
неподвижной точки 0 называется векторная
сумма моментов импульсов всех материальных
точек системы относительно той же точки
0
![]() (22)
(22)
7. Момент импульса относительно неподвижной осиz.
Моментом импульса материальной точки
аотносительно неподвижной осиzназывается скалярная величина![]() ,
,
равная проекции на эту ось вектора
момента импульса, определенного
относительно произвольной точки 0 данной
оси. Значение момента импульса не зависит
от положения точки 0 на осиz.

Рис.10.
Рассмотрим вращение твердого тела
вокруг неподвижной оси z(О-О1). Каждая точка твердого тела
описывает горизонтальную окружность
радиуса![]() со скоростью
со скоростью![]() .
.
Скорость![]() .и
.и
импульс![]() перпендикулярны этому радиусу,
перпендикулярны этому радиусу,
поэтомурадиус является плечом вектора![]() (угол
(угол![]() =900).
=900).
Момент импульса каждой точки твердого
тела относительно осиzравен
![]() (23)
(23)
и направлен по оси в сторону, определяемую
правилом правого винта. Моменты импульса
всех точек твердого тела будут
сонаправлены, поэтому момент импульса
твердого тела относительно оси есть
сумма моментов импульсов отдельных
частиц
![]() ,
,
то есть все точки твердого тела вращаются
с одинаковой угловой скоростью, то wможно вынести за знак суммы
![]() ,
,
то есть
.![]() .
.
Момент импульса твердого тела относительно
оси вращения равен произведению момента
инерции тела относительно той же оси
на угловую скорость.
Лекция 6. Уравнения динамики вращательного движения.
1. Закон сохранения момента импульса.
Продифференцируем момент импульса
![]() по времени
по времени
![]() .
.
Величина
![]() есть скорость материальной точки,
есть скорость материальной точки,
связанная с ее импульсом соотношением![]() .
.
Поэтому первое слагаемое![]() равно нулю как векторное произведение
равно нулю как векторное произведение
коллинеарных векторов![]() и
и![]() ,
,
(![]() )
)
Второе слагаемое можно преобразовать
с помощью уравнения Ньютона
![]() .
.
Тогда
![]() .
.
(1)
Это уравнение моментов относительно
неподвижной точки. Производная по
времени момента импульса материальной
точки (относительно неподвижной точки)
равна моменту силы относительно этой
же точки.
Уравнение моментов (1) можно обобщить
на случай произвольной системы
материальных точек. Пусть система
состоит из nматериальных
точек вращающихся вокруг центра 0.
![]()
+
![]()
+
…………………….
+
![]()
![]()
где
![]() – момент внутренних сил,
– момент внутренних сил,![]() – момент внешних сил.
– момент внешних сил.
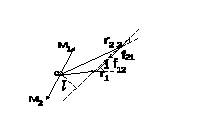
По третьему закону Ньютона
![]() = 0, так как внутренние силы входят
= 0, так как внутренние силы входят
попарно, сила с которой одно тело
действует на другое равно и противоположно
направлена сила с которой второе тело
действует на первое. Полный момент этих
сил равен нулю (см. рис.)
![]() ,
,
![]()
![]()
![]()
Исходя из этого уравнение примет вид
![]() ,
,
где
![]() – момент импульса системы материальных
– момент импульса системы материальных
точек.
![]() =
=![]() – момент всех сил действующих на систему
– момент всех сил действующих на систему
материальных точек.
![]() (2)
(2)
Основной закон динамики вращательного
движения для системы материальных
точек. Производная по времени от
момента импульса системы материальных
точек относительно неподвижной точки
равна геометрической сумме моментов
всех внешних сил относительно этой
точки.
Если момент всех внешних сил относительно
неподвижной точки равен нулю, то момент
импульса системы относительно той же
неподвижной точки остается постоянным
во времени.
![]() и
и![]() или
или![]() (3)
(3)
Выражение (3) – математическая запись
закона сохранения момента импульса.
Если мы продифференцируем по времени
момент импульса относительно неподвижной
оси, то получим уравнение моментов
относительно неподвижной оси
![]() (4)
(4)
Как было показано ранее, момент импульса
твердого тела относительно оси вращения
равен
![]() .
.
Если момент инерции
![]() при
при
вращении остается постоянным, то
![]() ,
,
где![]() – угловое ускорение. Тогда
– угловое ускорение. Тогда
![]() (5).
(5).
Произведение момента инерции твердого
тела относительно оси вращения на
угловое ускорение равно моменту внешних
сил относительно той же оси.
Уравнение (5) – основное уравнение
динамики вращательного движения вокруг
неподвижной оси. Оно напоминает уравнение
Ньютона для поступательного движения.
Роль массы mиграет момент
инерцииJ, роль скоростиv– угловая скоростьw,
роль с илыF– момент силыM, роль импульсаp– момент импульсаL. Момент
импульсаLчасто называют
вращательным импульсом системы.
Если момент внешних сил Mzотносительно оси вращения равен нулю,
то вращательный импульс сохраняется:
![]() (6)
(6)
Продемонстрировать закон сохранения
импульса можно с помощью скамьи
Жуковского. Скамья Жуковского представляет
собой стул, сиденье которого имеет форму
диска. Диск может свободно вращаться
вокруг вертикальной оси на шариковых
подшипниках.
Человек, оттолкнувшись ногой от пола,
приводит скамью во вращение. Вместе со
скамьей будет вращаться и он сам. Во
время вращения момент импульса системы
скамья плюс человек будет оставаться
постоянным, какие бы внутренние движения
не совершались в системе.
Если человек разведет руки в стороны,
то он увеличит момент инерции системы
J, а потому угловая скорость
вращенияwдолжна
уменьшиться, чтобы оставался неизменным
вращательный импульсL=Jw(см рис 1а и 1б)


Рис.1а. L=J1w1Рис.1бL=J2w2
J1w1=J2w2(J2>J1,w2<w1)
Если человек, стоя на неподвижной скамье
Жуковского, начинает делать конические
движения над головой, скамья начинает
вращаться в другую сторону (рис.2).

Общий момент импульса системы остается
равным нулю.
Когда винт судна начинает вращаться,
по закону сохранения момента импульса
системы, корпус судна должен вращаться
в противоположную сторону. В обычных
условиях это не страшно, но в критических
ситуациях (сильная боковая волна, легкое
судно) может привести к опрокидыванию
судна. Эта же ситуация всегда реализуется
и для вертолетов. Чтобы этого не
происходило, на хвосте устанавливается
другой винт для гашения вращения.
В заключении сопоставим основные
величины и уравнения определяющие
вращение тела им его поступательное
движение.
|
Поступательное |
Вращательное |
|
Масса m
Скорость v
Ускорение a Сила F
Импульс p
Основное уравнение динамики F
F
Работа dA Кинетическая энергия mv2/2 |
Момент инерции J
Угловая скорость w
Угловое ускорение ε =
Момент силы M
Момент импульса L
Основное уравнение динамики M
M
Работа вращения dA Кинетическая |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Моме́нт и́мпульса (кинетический момент, угловой момент, орбитальный момент, момент количества движения) характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Замечание: момент импульса относительно точки — это псевдовектор, а момент импульса относительно оси — скалярная величина.
Следует учесть, что вращение здесь понимается в широком смысле, не только как регулярное вращение вокруг оси. Например, даже при прямолинейном движении тела мимо произвольной воображаемой точки, оно также обладает моментом импульса. Наибольшую роль момент импульса играет при описании собственно вращательного движения.
Момент импульса замкнутой системы сохраняется.
Момент импульса в классической механике
Связь между импульсом 
Определение
Момент импульса
ъ

где 

В системе СИ момент импульса измеряется в единицах джоуль–секунда; Дж·с.
Из определения момента импульса следует его аддитивность. Так, для системы частиц выполняется выражение:

Вычисление момента
Так как момент импульса определяется векторным произведением, он является псевдовектором, перпендикулярным обоим векторам

где 
Запишем 







Для систем, совершающих вращение вокруг одной из осей симметрии (вообще говоря, вокруг так называемых главных осей инерции), справедливо соотношение

где 

В общем случае вектор момента связан с вектором угловой скорости линейным оператором момента инерции:

Сохранение углового момента
| Симметрия в физике | ||
|---|---|---|
| Преобразо- вания |
Инвариант- ность |
Закон сохранения |
| ↕ трансляции времени | Консервативность | …энергии |
| ↔ трансляции пространства | Однородность | …импульса |
| ○ Вращения | Изотропия | …момента импульса |
| × Группа Лоренца | Относительность Лоренц-инвариантность |
инвариантность интервала (и др. скаляров пространства-времени) |
Закон сохранения момента импульса (закон сохранения углового момента): векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем.
В замкнутых системах момент импульса постоянен.
Производная момента импульса по времени есть момент силы:

Таким образом, требование системы быть «замкнутой», означает равенство нулю главного (суммарного) момента внешних сил:

где 
Математически закон сохранения момента импульса следует из изотропии пространства, то есть из инвариантности пространства по отношению к повороту на произвольный угол. При повороте на произвольный бесконечно малый угол 





С учетом 


Теперь, пользуясь свойством смешанного произведения, совершим циклическую перестановку векторов, в результате чего получим, вынося общий множитель:

где, 
На орбитах момент импульса распределяется между собственным вращением планеты и момента импульса ее орбитального движения:

Момент импульса в электродинамике
При описании движения заряженной частицы в электромагнитном поле, канонический импульс 


где 


где 
Момент импульса в квантовой механике
Оператор момента
В квантовой механике момент импульса квантуется, то есть он может изменяться только по «квантовым уровням» между точно определенными значениями. Проекция на любую ось момента импульса частиц, обусловленного их пространственным движением, должна быть целым числом, умноженным на
В классическом определении момент импульса зависит от 6 переменных 





Математически, момент импульса в квантовой механике определяется как количество движения — не количественно, а как оператор физической величины:

где

где
и даже более важные подстановки с гамильтонианом частицы без заряда и спина:
Симметрия вращения
Операторы момента импульса обычно встречаются при решении задач сферической симметрии в сферических координатах. Тогда момент импульса в пространственном отображении:

Когда находят собственные значения этого оператора, получают следующее:

где
— сферические гармоники.
Вычисление момента импульса
Если имеется материальная точка массой 


где 
Чтобы рассчитать момент импульса тела, его надо разбить на бесконечно малые кусочки и векторно просуммировать их моменты как моменты импульса материальных точек, то есть взять интеграл:

Литература
- Биденхарн Л., Лаук Дж. Угловой момент в квантовой физике. Теория и приложения. Том 1. М.: Мир, 1984. 302с.
- Блохинцев Д. И. Основы квантовой механики. 5-ое изд. Наука, 1976. — 664 с.
- Боум А. Квантовая механика: основы и приложения. М.: Мир, 1990. — 720c.
- Варшалович Д. А., Москалев А. Н., Херсонский В. К. Квантовая теория углового момента. Л.: Наука, 1975.
Эта страница использует содержимое раздела Википедии на русском языке. Оригинальная статья находится по адресу: Момент импульса. Список первоначальных авторов статьи можно посмотреть в истории правок. Эта статья так же, как и статья, размещённая в Википедии, доступна на условиях CC-BY-SA .
