В результате
проделанной работы были определены
средние значения <t>
прохождения грузом пути h
с занесением в таблицу измерений времени
прохождения груза (таблица 4.1).
Определены
случайная, приборная и общая погрешности
измерений t
и рассчитаны погрешности величин t2.
Был построен
линеаризованный график зависимости и
рассчитан коэффициент t2,
все точки укладываются в пределах
погрешностей.
Определены
момент инерции блока экспериментально
и момент инерции блока аналитический.
При сравнивании результатов получена
разница в 1,358
%
6. Ответы на контрольные вопросы
1.Что такое момент сил и момент инерции?
Момент силы – это
векторная физическая величина, равная
произведению радиус-вектора, проведенного
от оси вращения к точке приложения силы.
Характеризует вращательное действие
силы на твердое тело.
Момент инерции –
скалярная физическая величина мера
инертности во вращательном движении
вокруг оси, как масса тела является
мерой его инертности в поступательном
движении, и характеризуется распределением
масс в теле, равным сумме произведений
элементарных масс на квадрат их расстояний
до базового множества.
2.Моменты каких сил действуют на блок?
На блок действуют:
момент инерции тела, момент сил натяжения
нитей, момент инерции оси вращения.
3.Как рассчитать момент инерции блока? Сформулировать теорему Штейнера.
Рассчитать момент
инерции блока можно по формуле:
I=![]() mб
mб![]() R2
R2
Где mб
– масса блока;
R
– радиус блока.
Теорема Штейнера:
Момент инерции
тела I0
относительно
произвольной оси равен сумме момента
инерции этого тела Ic
относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела m
на квадрат
расстояния a
между осями:
I0=Ic+ma2
где
Ic
– известный момент инерции относительно
оси, проходящей через центр масс тела,
I0
– искомый момент инерции относительно
параллельной оси,
m
– масса тела,
a
– расстояние между осями.
4.Укажите возможные причины несовпадения экспериментальных результатов с расчетными.
Неточность
вычислений; физические допущения при
анализе движения грузов; погрешности
измерения величин, колебания параметров
среды, параметров измерительной
установки.
7. ПРИЛОЖЕНИЕ
К работе прилагается
регистрационный файл (phyLab2),
файл
журнала измерений
(Lab2.txt),
рецензия:
Соседние файлы в папке Физика 1 лаб № 2
- #
22.06.20147.47 Кб37phyLab2.reg
- #
- #
- #
- #
22.06.201441.47 Кб56Шаблон ЛР№2.xls

У многих учащихся возникают трудности с решением задач, связанных со вращательным движением тел. Также вызывают стопор задачи с блоками. В основном я это понял во время занятий физикой со своими школьниками и студентами. Поэтому я решил написать статью, в которой рассматриваю 7 случаев с небольшими задачами по динамике блоков. Это те основные кирпичики, из которых складываются все типы задач с блоками. В том числе и олимпиадные. Все примеры представлены от простого к сложному. Приятного чтения 🙂
А пока попрошу подписаться на канал в telegram IT mentor . Автор пишет краткие заметки и наблюдения по физике, математике, программированию, железу и технике 💡
Случай 1
Рассмотрим самый простой случай. Идеальная веревка перекидывается через неподвижный идеальный блок. Мы пытаемся удержать груз, прикрепленный на одном конце веревки, с помощью прикладывания силы F на другом конце веревки. Сначала рассмотрим статическое равновесие. Будем определять силу F, которую нам необходимо прикладывать.
Пожалуй, что из задач с блоками этот пример является самым простым. Допущения, принятые здесь, вполне согласуются с реальной жизнью. Но всё таки это сильно упрощенная модель.
1. Выигрыша в силе мы не имеем;
2. На какое расстояние сдвинули веревку, на такое же расстояние поднимется груз;
3. Удобство поднятия груза заключается в выборе направления тяги.
Случай 2
Немного усложним нашу ситуацию, добавив в систему ускорение. Какую силу нужно приложить, чтобы поднять груз с ускорением? Здесь также будем учитывать, что веревка идеальная:
нерастяжимая — поэтому все ускорения равны
невесомая — поэтому для правого конца выполняется условие F = T (для нулевой массы веревки).
Случай 3
Будем продолжать усложнение конфигурации из грузов и блоков. Что если в систему добавить второй блок, который будет висеть на веревке, один конец которой будет подвешен к потолку, а другой конец протянут через неподвижный блок и в итоге удержан нашей силой F. Рассмотрим статической равновесие системы и попробуем найти силу F. Теперь в задаче появляются две веревки:
Первая короткая нить удерживает груз (на рисунке изображена желтым цветом). Вторая длинная нить протянута через блоки, один конец закреплен в потолке, а другой конец удерживается силой F (на рисунке нить обозначена оранжевым цветом).
Мы получили выигрыш в силе в два раза. Простыми словами объяснить это можно так: 50 кг мы сможем удержать, тянув за свободный конец оранжевой веревки так, как будто мы бы удерживали 25 кг в ситуации с одним неподвижным блоком (Случай 1).
Как-то раз, занимаясь в тренажерном зале, я обратил внимание на разговор двух своих друзей. Они рассуждали, что поднимали на бицепс 70 кг в тренажере (так было написано на плитках, когда вставляешь штырек в определенный вес). Мне было интересно и я спросил: «Если в тренажере вы поднимаете 70 кг на бицепс, то почему же не можете поднять штангу в 70 кг также на бицепс?». Вопрос вызвал замешательство… Действительно, они не обращали на это внимание раньше. Вы, мои дорогие читатели, уже наверняка догадались в чем подвох. Конечно же в тренажере был подвижный ролик, тот самый блок, который катался вверх-вниз, удерживываемый тросиком, и давал выигрыш в силе в 2 раза. То есть по факту человек поднимает в этом тренажере 35 кг, а не 70 кг, как написано на плитках. Многие об этом не задумываются 🙂
Подвижный блок можно считать воистину крутым изобретением человечества. Ведь он дает возможность поднять груз, который мы бы никогда не подняли своими силами без этого хитрого приспособления.
Но во всём ли мы выигрываем? Нет, не во всём. Как и любой рычаг, подвижный блок помогает выиграть в силе, но проиграть в расстоянии. Это можно понять, если считать, что работа, выполняемая нами по мерещению груза (изменению его потенциальной энергии в случае подъема) является величиной постоянной ( *здесь мы пока не учитываем трение, которое есть в любых блоках, подшипниках и других механизмах ).
Как видите по рисункам, выиграть можно и в 4 раза, используя только два блока. Такая конструкция часто применяется в подъемных кранах. Однако, чем тяжелее груз, тем медленнее его будут поднимать. Такой же принцип наблюдается в коробке передач автомобиля, такой же принцип работает в переключении скоростей велосипеда. Чем быстрее, тем труднее. Или наоборот, чем легче, тем медленее.
Случай 4
Что если мы усложним наш пример, включив в него ускорение? Здесь важно не забыть учесть тот момент, который мы уже обсуждали в предыдущем пункте. Ускорение центра масс подвижного блока будет в два раза меньше, чем ускорение свободного конца длинной нити, протянутой через два блока. Почему? Попытаюсь это продемонстрировать на рисунке ниже.
Определить соотношение сил и перемещений можно с помощью метода виртуальных перещений. Однажды во время строительства одного из соборов в Швейцарии его архитектору понадобились блоки, позволяющие поднимать на большую высоту особо тяжелые грузы. Он сконструировал сложный полиспаст ( это грузоподъемное устройство, которое натягивается несколькими тросами. подробнее ), но запутался в многочисленных силах натяжения тросов и не смог рассчитать, сколько рабочих будет нужно нанимать для обслуживания грузоподъемного устройства. Архитектор обратился за помощью к известному ученому того времени Иоганну Бернулли (1667 – 1748). Едва взглянув на чертеж, Бернулли сразу же дал ответ. Разумеется, архитектор был очень удивлен и попросил объяснить ему суть решения…
Часто в задаче нужно учесть условия равновесия системы. Для этого определяются силы реакций механических связей. Связи — это ограничения, наложенные на положение отдельных частей системы или их возможные перемещения. Связями могут быть нити, шарниры, блоки. Чем больше связей, тем сложнее проследить за возникающими в них реакциями.
В большинстве случаев мехнические связи обладают интересным свойством, которое Бернулли положил в основу своего простого и изящного способа нахождения условий равновесия механической системы. Напишем это свойство:
Полная работа всех сил реакции, возникающих в связях системы при любых достаточно малых возможных отклонениях системы от положения равновесия, равна нулю.
Замечание: любые возможные отклонения не должны противоречить механическим связям: нити не должны рваться, шарниры не должны ломаться, блоки не должны деформироваться. Это и есть возможные или виртуальные перемещения.
Бернулли сформулировал этот принцип в 1717 году. Получается, что для исследования равновесия системы, достаточно выбрать удобные виртуальные перемещения (мы рисовали это выше), вычислить соответствующую им работу только внешних сил, а затем приравнять её к нулю.
Хотите простейший пример на применение данного метода? Давайте представим, что некоторый груз массой m подвешивают на пружину, и он её растягивает с силой тяжести m•g. При этом в самой пружине возникает сила упругости T. Допустим, груз сместился вниз на маленькую величину Δx. Тогда работа силы тяжести будет равна ΔA₁ = m•g•Δx, а работа силы упругости пружины будет ΔA₂ = − T•Δx. Знак минус здесь стоит потому что сила упругости всегда направлена против перемещения (вспоминайте закон Гука). Тогда, согласно принципу возможных перемещений, сумма работ обеих сил должна быть равна нулю:
ΔA₁ + ΔA₂ = m•g•Δx − T•Δx = 0 откуда получаем T = m•g
Замечание: Конечно же эту задачу можно решить обычным способом. Более того, оба метода будут примерно одинаковы по степени сложности. НО, существуют случаи, когда применение метода возможных перемещений дает более быстрое и простое решение. Иногда позволяет решать задачи, которые не разрешаются на основе обычнх уловий равновесия. Этот метод можно применяться не только для задач механики, но и для задач электростатики или молекулярной физики.
Итак, ускорение повлияет на силы, но не сильно. Мы же помним, что в нашем случае блоки по-прежнему идеальные, то есть их массу мы принимает за ноль (соответственно, момент инерции тоже).
Вот на этом моменте уже хочется обозначить несколько общих принципов решения таких задач.
Алгоритм, общие принципы, замечания
1. При решении нужно выяснить, какие силы действуют на тело, движение которого мы рассматриваем в конкретный момент времени. Все известные силы надо изобразить, сделать рисунок. Понимать со стороны каких тел действуют рассматриваемые силы. Действие одного тело на другое является взаимным (третий закон Ньютона). Бывает такое, что направление силы заранее неизвестно. Здесь не стоит переживать. Выберите то направление, которое вам кажется верным. При проецировании второгой закона Ньютона вы сможете получить численные значения для проекций. И если они будут положительные, то вы угадали с направлением. А если будут отрицательные, то вы не угадали, значит рисунок нужно подкорректировать, инвертировал стрелку, обозначающую силу. Если в задаче рассматривается несколько тел, то разумеется нужно расставить силы, действующие на все тела.
2. Далее осуществляется выбор системы отсчета. Оси (базис XOY) нужно выбирать так, что проекции был как можно более простыми, то есть чтобы как можно большее количество сил были параллельны или перпендикулярны выбранным осям.
3. Для каждого тела в системе записывается второй закон Ньютона. Затем этот закон проецируется на оси выбранного базиса (см 2 пункт). По началу вы можете сразу подставлять в полученную систему уравнений известные вам силы, углы, массы и проекции сил. Однако хорошим тоном является доведения решения до конца в буквенном виде. Если вы сейчас учитесь в школе, то обязательно научитесь оперировать буквами без подстановки чисел.
4. Для решения задач о движении системы тел одних уравнений движения (проекций второго закона Ньютона) может быть недостаточно. Нужна записать ещё все кинематические условия. Эти условия определяют соотношения между ускорениями различных объектов системы, обусловленные связями между ними.
Пример для неподвижных блоков: тела, связанные нерастяжимой нитью (идеальная нить), имеют вдоль этой нити одинаковые по модулю ускорения. И не важно через сколько неподвижных блоков перекинута нить.
Пример для подвижных блоков: При наличии подвижных блоков, ускорение тела (или свободного конца нити), перекинутой через неподвижный блок в два раза больше ускорения тела, прикрепленного к подвижному блоку. Так как за одинаковое время пройденные пути отличаются в два раза (мы это разбирали выше в статье).
5. Во множестве простых задач теоретической механики массой нитей, связывающих тела, пренебрегают. Только тогда натяжение таких нитей одинаково, какое бы мы не взяли сечение на всей длине.
6. Массой блоков также пренебрегают во множестве задач. В этих случаях натяжение нити, перекинутой через такой идеальный блок, можно считать одинаковым по обе стороны блока. В противном случае, если учитывать массу, то натяжения будут разными, угловая скорость будет меняться, то есть у нас появится вращающий момент сил, угловое ускорение и момент инерции реального блока.
7. Очень полезно попытаться понять как будут изменяться искомые величины при изменениях заданных величин. Если вы построите графики таких зависимостей, то сможете лучше разобраться в задаче.
Случай 5
Давайте рассмотрим задачу, в которой мы имеем два разных груза и два разных блока (подвижный и неподвижный.
Задача
Найдите силы натяжения T₁ и T₂ нитей abcd и ce в устройстве с подвижным блоком, изображенном на рисунке. Массы тел соответственно равны m₁ = 2 кг и m₂ = 3 кг.
Решение:
Обратите внимание, что сила натяжения оранжевой длинной веревки abcd меньше, чем сила натяжения короткой желтой веревки ce, хотя на короткой веревке груз висит более легкий, чем на длинной веревке. Получается, что сила натяжения уменьшается при постоянном движении троса.
Случай 6
В задачах на блоки грузы необязательно могут быть подвешены. Бывает так, что грузы скользят по плоскостям, потому как блок опускается под действием силы тяжести груза, прикрепленного к нему. Рассмотрим такой случай.
Задача
На рисунке изображена система движущихся тел, имеющих массы m₁ = m, m₂ = 4m, m₃ = m. Наклонная плоскость составляет с горизонтом угол α = 30°. Трение отсутствует. Определите силы натяжения нитей.
Решение:
Случай 7
Встречаются и более редкие задачи, которые вводят учащихся в замешательство. Это задачи связанные с реальными блоками. Основное отличие заключается в том, что мы учитываем массу блока, а следовательно учитываем его момент инерции. Для раскрутки блока с массой (реального блока) нужен ненулевой момент сил (в сторону вращения). Значит такие задачи отличаются тем, что силы натяжения одной и той же нити на таком блоке будут разные по обе стороны от перегиба нити на блоке. Звучит сложно? Понимаю… Сейчас мы разберемся как это работает на практике.
При описании движения по окружности (другими словами при описании вращения тела) удобно использовать величины угла поворота φ, угловой скорости ω, углового ускорения ε и момента сил M.
Роль массы при вращении тела (или движении по окружности) играет величина J = m·R². Будем называть эту величину моментом инерции. Тогда уравнение вращательного движения по окружности для точки можно записать в виде: J·ε = M. По своей сути последнее уравнение является удобной записью второго закона Ньютона в проекциях на тангенциальное (касатальное) направление при движении по окружности.
Момент инерции является мерой инертности тела. К примеру, камень на длинной верёвке будет раскрутить сложнее, чем на короткой.
Вопрос читателям канала: Почему велосипедной колесо до одной и той же угловой скорости легче раскрутить пацльцем, если прикладывать силу к ободу колеса, чем если прикладывать силу к спицам возле втулки?
Блоки из наших задач выше не являются материальными точками. Поэтому момент инерции для них выводится с помощью суммирования моментов инерции всех частичек (материальных точек), из которых состоит блок.
Наш блок мы будем представлять в виде сплошного диска, сделанного из однородного материала. Момент инерции такого блока J = 1/2·m·R². Возможно, вам непонятно откуда взялась 1/2 ? Тогда выведем формулу…
Вывод формулы для момента инерции кольца и диска (блока) при вращении вокруг оси, проходящей через центр симметрии диска (блока):
Задача с реальным блоком
Через блок, представляющий собой сплошной диск радиусом R, перекинута нить. На нити подвешены грузы массами m₁ и m₂ ( m₂ > m₁). Масса блока m. Определите разность сил натяжения нитей с обеих сторон блока и ускорение грузов. Считать, что нить нерастяжима и не может скользить по блоку.
Решение:
Как видно из решения, больше натягивается та часть нити, в сторону которой происходит вращение блока, то есть та часть, которая разматывает блок. Именно она и может порваться, ведь натяжение в ней больше. Обратим внимание, что разница натяжений в частях нити пропорциальна ускорение грузов и массе блока.
В этой статье разобрано 7 основных случаев, из которых состоят задачи на блоки. И я очень надеюсь, что вам было интересно почитать эту статью. Ибо время на неё было потрачено очень много.
💾 Метод виртуальных перемещений (скачать полезные задачи в pdf)
Ладно, пора заканчивать эту бесконечную статью… А то, боюсь, что до этого момента уже никто не дочитает. Тяжело читать статьи, в которых много математики. Есть и более приятный контент для расслабления.
📚 На Дзен недавно появился интересный канал «Читающий Лингвист». Автор канала пишет замечательные рецензии на зарубежную литературу, рассказывает о прочитанном и делает заметки на околокнижные лингвистические наблюдения.
Советую подписаться на этот авторский канал «Читающего Лингвиста»
Понравилась статья? Поставьте лайк, подпишитесь на канал! Вам не сложно, а мне очень приятно 🙂
Если Вам нужен репетитор по физике, математике или информатике/программированию, Вы можете написать мне или в мою группу Репетитор IT mentor в VK
Библиотека с книгами для физиков, математиков и программистов
Репетитор IT mentor в telegram

В этой главе…
- Переходим от динамики поступательного движения к динамике вращательного движения
- Вычисляем момент инерции
- Определяем работу вращательного движения
- Находим связь между работой и изменением кинетической энергии
- Изучаем закон сохранения момента импульса
Эта глава посвящена динамике вращательного движения, т.е. описанию сил и их влияния на характер вращательного движения. Здесь рассматриваются основные законы динамики вращательного движения по аналогии с законами динамики поступательного движения. Например, описывается аналог второго закона Ньютона (см. главу 5), представлено новое понятие “момент инерции”, исследуется связь между работой и кинетической энергией и т.п.
Содержание
- Применяем второй закон Ньютона для вращательного движения
- Преобразуем тангенциальное ускорение в угловое
- Пример: вычисляем момент силы для обеспечения углового ускорения
- Вычисляем момент инерции протяженного объекта
- Пример: замедление вращения компакт-диска
- Еще один пример: поднимаем груз
- Вычисляем энергию и работу при вращательном движении
- Работа при вращательном движении
- Изучаем кинетическую энергию вращательного движения
- Измеряем кинетическую энергию бочки, катящейся по наклонной плоскости
- Не можем остановиться: момент импульса
- Сохраняем момент импульса
- Пример закона сохранения момента импульса: вычисляем скорость спутника
Применяем второй закон Ньютона для вращательного движения
Согласно второму закону Ньютона (см. главу 5), ускорение объекта под действием силы пропорционально величине силы и обратно пропорционально массе объекта:

где ( mathbf{a} ) — это вектор ускорения, ( mathbf{F} ) — вектор силы, а ( m ) — масса объекта. Подробнее о векторах рассказывается в главе 4. Соблюдается ли этот закон для вращательного движения?
В главе 10 мы уже познакомились характеристиками вращательного движения, которые являются эквивалентами (аналогами) некоторых характеристик поступательного движения. А как будет выглядеть аналог у второго закона Ньютона? Похоже, что во вращательном движении роль ускорения ( mathbf{a} ) играет угловое ускорение ( alpha ), а роль силы ( mathbf{F} ) — момент силы ( mathbf{M} )? Не вдаваясь в подробности, скажем лишь, что это действительно так. А что же с массой? Оказывается, что для этого используется новое понятие — момент инерции ( l ). Известно, что второй закон Ньютона для вращательного движения принимает следующий вид:

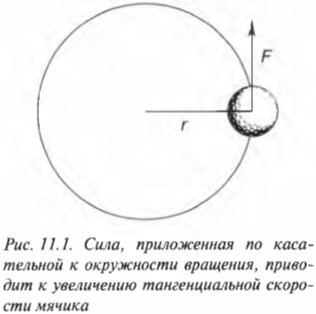
Рассмотрим простой пример. Пусть привязанный нитью мячик для игры в гольф вращается по окружности, как показано на рис. 11.1. Допустим, что к мячику приложена направленная по касательной к окружности тангенциальная сила, которая приводит к увеличению тангенциальной скорости мячика. (Обратите внимание, что речь идет не о нормальной силе, направленной вдоль радиуса окружности вращения. Более подробно нормальная и тангенциальная скорости, а также нормальное и тангенциальное ускорения рассматриваются в главе 10.)
Поскольку:

то, умножая обе части этой формулы на радиус окружности ( r ), получим:

Поскольку ( rmathbf{F}=mathbf{M} ) то

или

Таким образом, частично совершен переход от второго закона Ньютона для поступательного движения к его аналогу для вращательного движения. (Следует отметить, что это выражение справедливо для материальной точки, т.е. объекта, размерами которого можно пренебречь по сравнению с величиной радиуса окружности ( r ). Для протяженного объекта следует использовать другие формулы, которые описываются далее в этой главе. — Примеч. ред.)
Преобразуем тангенциальное ускорение в угловое
Чтобы полностью перейти от описания поступательного движения к описанию вращательного движения, необходимо использовать связь между угловым ускорением ( alpha ) и тангенциальным ускорением ( mathbf{a} ). Как нам уже известно из главы 10, они связаны следующим соотношением:

Подставляя это выражение в приведенную выше формулу

получим:

Итак, мы получили связь момента силы, действующей на материальную точку, и ее углового ускорения. Коэффициент пропорциональности между ними, ( l=mr^2 ), называется моментом инерции материальной точки. Таким образом, мы получили эквивалент второго закона Ньютона для вращательного движения, где роль силы играет момент силы, роль ускорения — угловое ускорение, а роль массы — момент инерции.
Пример: вычисляем момент силы для обеспечения углового ускорения
Если на объект действует несколько сил, то второй закон Ньютона имеет следующий вид:

где ( mathbf{sum!F} ) обозначает векторную сумму всех сил, действующих на объект.
Аналогично, если на объект действует несколько моментов сил, то второй закон Ньютона имеет вид:

где ( mathbf{sum! M} ) обозначает векторную сумму всех моментов сил, действующих на объект. Аналог массы, т.е. момент инерции, измеряется в кг·м2.
Помните, что аналогом второго закона Ньютона при описании вращательного движения является формула ( mathbf{sum! M}=lalpha ), т.е. угловое ускорение прямо пропорционально сумме всех моментов сил, действующих на вращающийся точечный объект, и обратно пропорционально моменту инерции.
Пусть мячик из предыдущего примера (см. рис. 11.1) имеет массу 45 г, а длина нити равна 1 м. Какой момент сил необходимо приложить, чтобы обеспечить угловое ускорение — ( 2pi с^{-2} )? Подставляя значения в уже известную нам формулу

получим:

Как видите, для решения этой задачи достаточно было поступить, как при определении силы, необходимой для обеспечения ускорения поступательного движения (где нужно было бы умножить массу на ускорение), т.е. умножить угловое ускорение на момент инерции.
Вычисляем момент инерции протяженного объекта
Момент инерции легко вычисляется для очень маленького (точечного) объекта, если все точки объекта расположены на одинаковом расстоянии от точки вращения. Например в предыдущем примере, если считать, что мячик для игры в гольф гораздо меньше длины нити, то все его точки находятся на одинаковом расстоянии от точки вращения, равном радиусу окружности вращения ( r ). В таком случае момент инерции имеет знакомый вид:

где ( r ) — это расстояние, на котором сосредоточена вся масса мячика ( m ).
Однако такая идеальная ситуация имеет место далеко не всегда. А чему равен момент инерции протяженного объекта, например стержня, вращающегося относительно одного из своих концов? Ведь его масса сосредоточена не в одной точке, а распределена по всей длине. Вообще говоря, для определения момента инерции протяженного объекта нужно просуммировать моменты инерции всех материальных точек объекта:

Например, момент инерции ( l ) системы из двух “точечных” мячиков для игры в гольф с одинаковой массой ( m ) на расстояниях ( r_1 ) и ( r_2 ) равен сумме их отдельных моментов инерции ( l_1=mr_1^2 ) и ( l_2=mr_2^2 ):

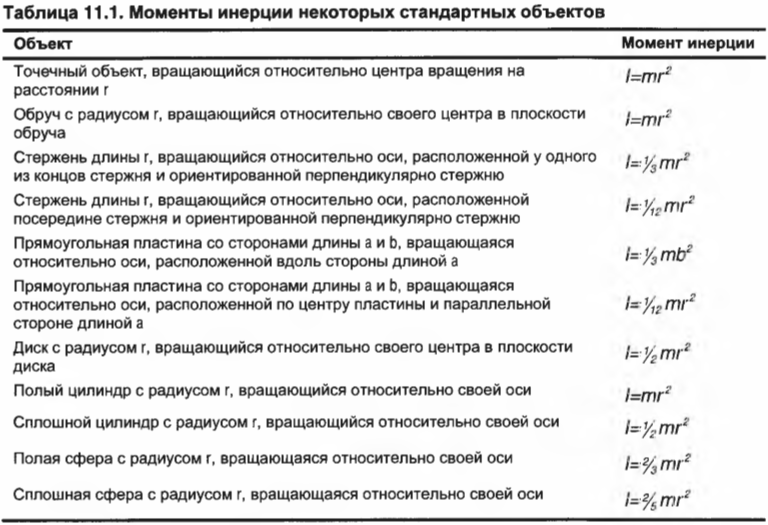
А как определить момент инерции диска, вращающегося относительно своего центра? Нужно мысленно разбить диск на множество материальных точек, вычислить момент инерции каждой такой точки и просуммировать полученные моменты инерции. Физики научились вычислять моменты инерции для многих объектов со стандартной формой. Некоторые из них приведены в табл. 11.1.
Попробуем вычислить моменты инерции нескольких предметов с простой геометрией.
Пример: замедление вращения компакт-диска
Компакт-диски могут вращаться с разными угловыми скоростями. Это необходимо для обеспечения одинаковой линейной скорости считывания информации на участках, находящихся на разных расстояниях от центра вращения. Пусть диск массой 30 г и диаметром 12 см сначала вращается со скоростью 700 оборотов в секунду, а спустя 50 минут — со скоростью 200 оборотов в секунду. Какой средний момент сил действует на компакт-диск при таком уменьшении скорости? Связь момента сил и углового ускорения имеет вид:

Момент инерции диска с радиусом ( r ), вращающегося относительно своего центра в плоскости диска, выражается формулой:

Подставляя значения, получим:

Теперь нужно определить угловое ускорение, которое определяется следующей формулой:

Изменение угловой скорости ( Deltaomega ) произошло за промежуток времени:

В данном примере изменение угловой скорости:
где ( omega_1 ) — конечная, а ( omega_0 ) — начальная угловая скорость компакт-диска.
Чему они равны? Начальная скорость 700 оборотов в секунду означает, что диск за секунду 700 раз проходит ( 2pi ) радиан:

Аналогично, конечная скорость 200 оборотов в секунду означает, что диск за секунду 200 раз проходит ( 2pi ) радиан:

Подставляя значения в формулу углового ускорения, получим:

Подставляя значения момента инерции и углового ускорения в итоговую формулу момента силы, получим:

Итак, средний момент равен 10-4 Н·м, а чему будет равна сила для создания такого момента, если она приложена к краю диска? Ее величину легко вычислить по следующей формуле:

Оказывается, для такого замедления компакт-диска нужно приложить не такую уж и большую силу.
Еще один пример: поднимаем груз
Вращательное движение порой внешне выглядит не так очевидно, как вращение ком- пакт-диска. Например подъем груза с помощью блока также является примером вращательного движения. Хотя канат и груз движутся поступательно, но сам блок вращается (рис. 11.2). Пусть радиус блока равен 10 см, его масса равна 1 кг, масса груза равна 16 кг, а к веревке прилагается сила 200 Н. Попробуем вычислить угловое ускорение блока.
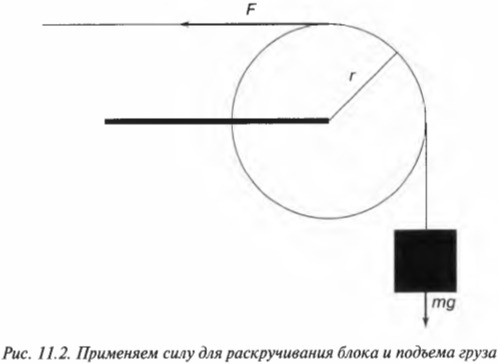
В данном примере нужно вычислить сумму всех моментов сил ( mathbf{sum! M} ), которые действуют на веревку:

В данном примере на веревку действует два момента сил: один ( M_1 ) со стороны груза весом ( mg ), а другой ( M_2 ) — со стороны горизонтальной силы ( F ):

Отсюда получаем формулу для углового ускорения:
Эти моменты ( M_1 ) и ( M_2 ) имеют одинаковое плечо, равное радиусу блока ( r ), поэтому:

Поскольку блок имеет форму диска, то из табл. 11.1 находим его момент инерции:

Подставляя выражения для ( l ), ( M_1 ) и ( M_2 ) в формулу для углового ускорения, получим:

Подставляя значения, получим:

Вычисляем энергию и работу при вращательном движении
При изучении поступательного движения в главе 8 мы познакомились с понятием работа. Она равна произведению силы на перемещение под действием этой силы. Можно ли выразить работу при вращательном движении на основе его характеристик? Конечно можно, и для этого потребуется преобразовать силу в момент силы, а перемещение — в угол. В этом разделе демонстрируется такое преобразование, а также связь работы с изменением энергии.
Работа при вращательном движении
Допустим, что инженеру в области автомобилестроения необходимо рассчитать параметры революционно новой шины колеса. Для начала он решил оценить работу, которую необходимо выполнить для ускоренного раскручивания этой шины. Как связать работу при поступательном движении и работу при вращательном движении? Инженер предложил простую, как все гениальное, идею: “связать” шину веревкой. Точнее говоря, он предложил намотать веревку на шину, потянуть за веревку с помощью внешней силы и раскрутить шину. Так, приравнивая работу внешней силы при поступательном движении веревки и работу ускорения вращательного движения шины, можно, образно говоря, “связать” их веревкой.
Пусть шина имеет радиус ( r ) и для ее вращения используется сила ( F ), как показано на рис. 11.3.
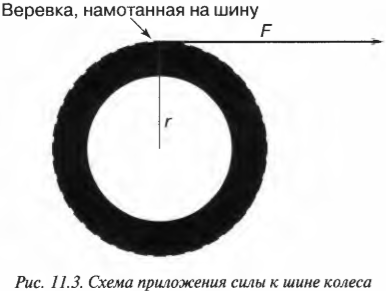
Чему равна работа этой силы? Применим знакомую нам формулу:

где ( s ) — это перемещение веревки под действием этой силы. В данном примере перемещение ( s ) равно произведению радиуса ( r ) на угол поворота шины ( theta ):

Подставляя это выражение в формулу работы, получим:

Поскольку момент ( M ), создаваемой этой силой, равен:

то получаем для работы:

Таким образом, работа при вращательном движении равна произведению момента силы и угла поворота. Она измеряется в тех же единицах, что и работа при поступательном движении, т.е. в джоулях.
Учтите, что для описания вращательного движения в этих формулах работы угол нужно указывать в радианах.
Вот еще один пример. Пусть пропеллер самолета совершает 100 поворотов с постоянным моментом силы 600 Н·м. Какую работу выполняет двигатель самолета? Для ответа на этот вопрос начнем с уже известной нам формулы:

Полный оборот соответствует повороту на угол ( 2pi ). Подставляя значения в формулу, получим:

Что происходит с выполненной таким образом работой? Она преобразуется в кинетическую энергию вращательного движения.
Изучаем кинетическую энергию вращательного движения
Из главы 8 нам уже известно, что объект массы ( m ), движущийся поступательно со скоростью ( v ), обладает кинетической энергией:

А как получить формулу кинетической энергии для вращающегося объекта? Нужно применить данную формулу для всех его частичек.
При описании вращательного движения аналогом массы является момент инерции, а аналогом скорости — угловая скорость.
Как известно (см. главу 10), тангенциальная скорость ( v ) и угловая скорость ( omega ) связаны соотношением:

где ( r ) — это радиус окружности вращения.
Подставляя это соотношение в предыдущую формулу, получим:
Однако эта формула справедлива только для бесконечно малой материальной точки. Чтобы определить кинетическую энергию протяженного объекта, нужно просуммировать кинетические энергии всех его мельчайших материальных точек, т.е. вычислить сумму:
Как можно было бы упростить эту формулу? Предположим, что все составляющие частички протяженного объекта вращаются с одинаковой угловой скоростью. Тогда угловую скорость можно вынести за знак суммирования и получим:

Здесь начинается самое интересное. Ранее в этой главе уже приводилась формула момента инерции:

Теперь совсем нетрудно сделать подстановку в предыдущей формуле кинетической энергии:
Итак, кинетическая энергия вращательного движения вычисляется аналогично кинетической энергии поступательного движения, если вместо массы использовать момент инерции, а вместо тангенциальной скорости — угловую скорость. Примеры кинетической энергии вращательного движения окружают повсюду. Спутник на космической орбите и бочка пива, которую скатывают по наклонной плоскости, обладают определенной кинетической энергией вращательного движения. Особенности вращательного движения бочки пива более подробно описываются в следующем разделе.
Измеряем кинетическую энергию бочки, катящейся по наклонной плоскости
Итак, нам уже известно, что объекты могут двигаться поступательно и вращательно, причем двигаться так, что без знания строгих законов физики порой трудно понять их поведение. Да ну? Действительно, если бочка скользит вниз по наклонной плоскости, то ее потенциальная энергия превращается в кинетическую энергию поступательного движения (см. главу 8). А если бочка скатывается вниз по наклонной плоскости, то ее потенциальная энергия превращается не только в кинетическую энергию поступательного движения, но и в кинетическую энергию вращательного движения.
На рис. 11.4 показан случай, когда с наклонной плоскости высотой ( h ) скатываются сплошной и полый цилиндры с одинаковой массой ( m ). Какой цилиндр достигнет нижнего конца наклонной плоскости?
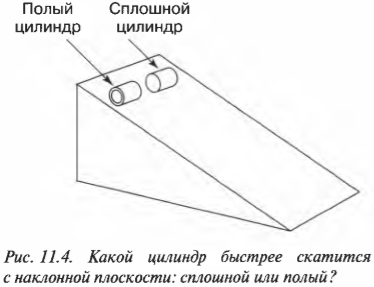
Иначе говоря: какой цилиндр будет обладать большей скоростью в конце наклонной плоскости? Поскольку действующие на цилиндры силы постоянны, то постоянны и их ускорения, а значит, большая скорость в конце пути означает меньшее время его прохождения. В случае только поступательного движения цилиндра и при отсутствии трения уменьшение потенциальной энергии ( mgh ) преобразуется в увеличение кинетической энергии только поступательного движения ( {}^1!/!_2mv^2 ), т.е.:
Однако в данном примере эта формула не годится, потому что цилиндры скатываются без проскальзывания. Это значит, что часть уменьшения потенциальной энергии будет преобразовываться в увеличение кинетической энергии поступательного движения ( {}^1!/!_2mv^2 ), а часть — в кинетическую энергию вращательного движения ( {}^1!/!_2Iomega ^2 ). Тогда предыдущее равенство принимает следующий вид:

Сделаем подстановку ( omega=v/r ) и получим:

Путем несложных алгебраических преобразований получим:

откуда легко получить выражение для скорости цилиндра:
Для обоих цилиндров все параметры одинаковы, кроме момента инерции ( I ). Как это повлияет на скорость цилиндров? Согласно данным из табл. 11.1, полый цилиндр имеет момент инерции ( mr^2 ), а сплошной — ( {}^1!/!_2mr^2 ).
Итак, для полого цилиндра получим:

а для сплошного цилиндра:

А их отношение равно:
Как видите, скорость сплошного цилиндра в 1,15 раза больше скорости полого цилиндра, а значит, сплошной цилиндр быстрее достигнет конца наклонной плоскости.
Как на пальцах объяснить полученный результат? Все очень просто. В полом цилиндре вся масса сосредоточена на расстоянии радиуса цилиндра, а в сплошном цилиндре значительная часть масса распределена ближе радиуса. Это значит, что при одинаковой угловой скорости в полом цилиндре больше материала будет обладать большей тангенциальной скоростью, а для этого потребуется потратить больше энергии.
Не можем остановиться: момент импульса
Допустим, нам нужно остановить космический корабль с массой 40 т, который находится на околоземной орбите. Для этого потребуется затратить немалые усилия. Почему? Все дело во вращательном импульсе космического корабля.
В главе 9 подробно описывается понятие импульс материальной точки, который выражается следующей формулой:

где ( m ) — это масса, a ( v ) — скорость материальной точки.
По аналогии, при описании вращательного движения физики используют понятие вращательный импульс (который в русскоязычной научной литературе чаще называют моментом импульса материальной точки. — Примеч. ред.):

где ( l ) — это момент инерции, а ( omega ) — угловая скорость материальной точки.
Следует помнить, что момент импульса (или вращательный импульс) является вектором, направление которого совпадает с направлением вектора угловой скорости.
Момент импульса в системе СИ измеряется в кг·м2·с-1 (более подробно системы единиц измерения описываются в главе 2). Одним из наиболее важных свойств момента импульса является закон сохранения момента импульса.
Сохраняем момент импульса
Закон сохранения момента импульса гласит: момент импульса сохраняется, если равна нулю сумма всех моментов внешних сил. Этот закон проявляется во многих обыденных ситуациях. Например часто приходится видеть, как мастера фигурного катания на льду вращаются с широко разведенными в стороны руками, а затем резко приближают их к своему телу и сильно ускоряют свое вращение. Дело в том, что таким образом они уменьшают свой момент инерции и, согласно закону сохранения момента импульса, увеличивают свою угловую скорость. Зная начальную угловую скорость вращения фигуриста ( omega_0 ) и его моменты инерции в позе с разведенными руками ( I_0 ) и в позе с сомкнутыми руками ( I_1 ), легко найти конечную угловую скорость ( omega_1 ) по формуле:
Однако этот закон удобно использовать не только в таких простых ситуациях. Возвращаясь к примеру с космическим кораблем на околоземной орбите, следует отметить, что его орбита далеко не всегда является строго круглой. Чаще всего орбиты спутников Земли и других планет имеют эллиптическую форму. Поэтому без закона сохранения момента импульса было бы гораздо сложнее определять параметры их орбитального движения.
Пример закона сохранения момента импульса: вычисляем скорость спутника
Предположим, что космический корабль вращается на эллиптической орбите вокруг Плутона. Причем в самой близкой к Плутону точке орбиты спутник находится на расстоянии 6·106 м от центра Плутона и имеет скорость 9·103 м/с. Вопрос: какой будет скорость спутника в самой далекой точке эллиптической орбиты на расстоянии 2·107 м от центра Плутона?
Для ответа на этот вопрос нужно воспользоваться законом сохранения момента импульса, поскольку на спутник не действуют никакие внешние моменты сил (сила гравитационного притяжения направлена параллельно радиусу и не создает момента). Однако закон сохранения момента импульса нужно преобразовать так, чтобы вместо угловых скоростей в его формулировке фигурировали тангенциальные скорости.
Итак, рассмотрим формулу закона сохранения момента импульса:
где ( I_{бл} ) — это момент инерции спутника в самой близкой точке, ( I_{дал} ) — это момент инерции спутника в самой далекой точке, ( omega_{бл} ) — угловая скорость спутника в самой близкой точке, а ( omega_{дал} ) — угловая скорость спутника в самой далекой точке.
Предположим, что размеры спутника гораздо меньше расстояния до центра Плутона и спутник можно считать материальной точкой. Тогда его моменты инерции равны:

и

где ( r_{бл} ) — это расстояние от спутника до центра Плутона в самой близкой точке эллиптической орбиты, а ( r_{дал} ) — это расстояние от спутника до центра Плутона в самой далекой точке эллиптической орбиты.
Кроме того:
и

Подставляя все перечисленные соотношения в формулу закона сохранения момента импульса

получим:

Отсюда путем несложных алгебраических преобразований, получим:

Подставляя значения, получим:

Итак, в ближайшей к Плутону точке орбиты спутник будет иметь скорость 9000 м/с, а в самой дальней — 2700 м/с. Этот результат мы легко получили только благодаря знанию закона сохранения момента импульса.
Глава 11. Раскручиваем объекты: момент инерции
3 (60%) 28 votes

Под скажите, пожалуйста.
Никак не могу понять как решается такая задача:
задача
В решении сказано:
J*(dw/dt) = R*(T2-T1) – откуда взялась такая формула?
В интернете не смог найти такой формулы.
R*(dw/dt) = a – откуда эта формула?
И самое не понятное – откуда взялась такая формула, причем R^2
(T2-T1) = J*a/R^2
По идее понятно что формулы просто приравняли, но откуда взялась у радиуса степень 2, если a/R=dw/dt ?
Добавлено через 8 минут
Оказывается надо выражать dw/dt – в обоих уравнениях и приравнивать. Странно что нельзя просто заменить (dw/dt) = a/R и подставить в другое уравнение.
Осталось только найти формулы в каком-то учебнике по физике, который мне пока что не попался. Может кто подскажет какой учебник посмотреть для получения нужных формул?
Нить с привязанными к ее концам грузами массами m1 = 50 г и m2 = 60 г перекинута через блок диаметром D = 4 см.
Определить момент силы М, который необходимо приложить к блоку, вращающемуся с частотой ν0 = 12 с-1, чтобы он остановился в течение времени T = 8 с. Диаметр блока D = 30 см.
Блок, имеющий форму диска массой m = 0,4 кг, вращается под действием силы натяжения нити, к концам которой подвешены грузы массами m1 = 0,3 кг и m2 = 0,7 кг.
К краю стола прикреплен блок. Через блок перекинута невесомая и нерастяжимая нить, к концам которой прикреплены грузы. Один груз движется по поверхности стола, а другой вдоль вертикали вниз.
К концам легкой и нерастяжимой нити, перекинутой через блок, подвешены грузы массами m1 = 0,2 кг и m2 = 0,3 кг.
