Цель работы:
измерение
момента инерции тела правильной
геометрической формы и момента инерции
тела человека.
Приборы и
принадлежности: крутильный
маятник, тело правильной геометрической
формы (куб, параллелепипед), модель тела
человека, секундомер.
Теоретическое введение
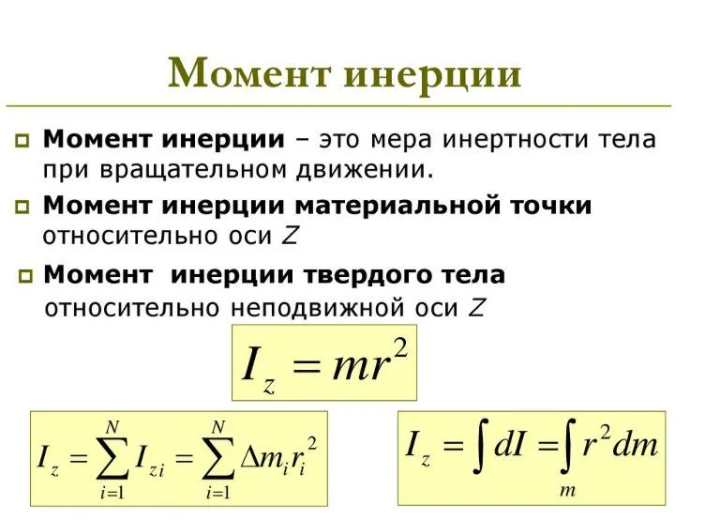
Момент
инерции (I)
– физическая величина, являющаяся мерой
инертности тела при его вращении.
Момент
инерции материальной точки
![]() ,
,
гдеm
– масса точки,
r
– расстояние
от оси вращения до рассматриваемой
точки.
Момент
инерции твердого тела (относительно
какой-либо оси вращения) зависит от
распределения масс относительно этой
оси и является величиной аддитивной,
т.е. равен сумме моментов инерции частей
тела относительно этой оси. Вычисление
момента инерции тела производится по
формуле
![]()
Из этой формулы
видно, что моменты инерции тел одинаковой
массы, но разной конфигурации различны.
Момент инерции
механической системы относительно
неподвижной оси Z
равен сумме моментов инерции всех его
частей относительно этой оси. Для
нахождения моментов инерции тела
относительно произвольной оси используют
теорему
Штейнера:
момент
инерции
![]() произвольного тела относительно
произвольного тела относительно
выбранной оси “а” равен моменту
инерции![]() этого же тела относительно оси “с”,
этого же тела относительно оси “с”,
проходящей через центр масс и параллельной
данной, сложенной с произведением массы
тела на квадрат расстояния между этими
осями:
![]() .
.
В некоторых
разделах космической и спортивной
медицины, ортопедии, бионики возникает
необходимость измерения момента инерции
тела человека и некоторых его частей.
При беге, например,
значительная часть энергии расходуется
на то, чтобы придать конечности ускорение,
направленное поочередно, то вперед, то
назад. Чем больше момент инерции, тем
больше требуется на это энергии. У
человека мускулатура конечностей
расположена главным образом в области
плеча и бедра, а не по всей длине руки
или ноги, в этом случае момент инерции
является минимальным.
Определить момент
инерции тела человека сложно, поэтому
мы прибегаем к модели. Зная соотношение
 между массой человека и массой модели,
между массой человека и массой модели,
и между линейными размерами человека
и модели![]() ,
,
из теории подобия можно определить
соотношение![]() между моментами инерции модели и
между моментами инерции модели и
человека.![]() .
.
Измерив
экспериментально момент инерции модели,
можно рассчитать момент инерции тела
человека:
![]() .
.
(1)
Методика
эксперимента
Экспериментально
определяется период колебаний Т
крутильного маятника, представляющего
собой рамку, в которую вставлено тело
для определения его момента инерции.
При повороте рамки на малый угол
![]() возникает вращающий момент
возникает вращающий момент![]() ,
,
гдеk
– коэффициент
кручения проволоки. Предоставленный
сам себе маятник, выведенный из положения
равновесия, совершает гармонические
колебания. Записав уравнение динамики
для вращательного движения, получим
уравнение этих колебаний
 ,
,
(2)
где
![]() – угловое ускорение. Решением этого
– угловое ускорение. Решением этого
уравнения является функция
![]() ,
,
(3)
где
![]() –
–
максимальный угол поворота рамки,![]() –
–
собственная частота колебаний маятника.
Выполняя двукратное дифференцирование
этой функции и подставляя![]() и
и![]() в уравнение (2), с учетом того, что
в уравнение (2), с учетом того, что![]() ,
,
получим формулу для определения момента
инерции
 . (4)
. (4)
Измерив периоды
колебаний
![]() рамки с исследуемым телом и
рамки с исследуемым телом и![]() рамки без тела, по формуле (4) вычисляют
рамки без тела, по формуле (4) вычисляют
соответственно моменты инерции![]() и
и![]() .
.
Тогда момент инерции тела будет равен![]() .
.
Порядок выполнения
работы
-
Определение
момента инерции куба относительно оси
Z.
1.1. Включить
установку в сеть. Нажать кнопку «Сеть»
на лицевой панели. Кнопка «Пуск » отжата.
1.2. Подвести флажок
рамки к электромагниту. Нажать кнопку
«Сброс ».
1.3. Измерить не
менее трех раз время t
десяти
колебаний рамки с кубом. Для этого надо
нажать кнопку «Пуск» и когда табло
«Периоды» будет высвечивать «9» нажать
на кнопку «Стоп». Записать количество
колебаний п
и время
![]() .
.
Данные занести в таблицу 1.
1.4. Отжать кнопку
«Пуск», нажать кнопку «Сброс». Выключить
установку.
1.5. Определить
величину периода колебаний
![]() и вычислить среднее значение
и вычислить среднее значение![]() .
.
Полученный результат занести в таблицу
1.
1.6. Вычислить момент
инерции
![]() рамки вместе с кубом, подставляя в
рамки вместе с кубом, подставляя в
формулу (4) среднее![]() .
.
1.7. Измерить не
менее трех разных значений периодов
![]() рамки без куба. Для этого, держа левой
рамки без куба. Для этого, держа левой
рукой куб, правой вращать винт против
часовой стрелки, пока куб не освободится
из рамки. Найти среднее значение периода![]() повторив пункты 1.1 – 1.4. Данные занести
повторив пункты 1.1 – 1.4. Данные занести
в таблицу 2.
-
Вычислить моменты
инерции
 и
и .
. -
Сравнить полученное
значение I
с расчетным
 ,
,
предварительно измерив не менее трех
раз длину стороны куба и найдя
стороны куба и найдя .
.
Масса кубат
= 1кг. Результаты занести в таблицу 2.
 ,
,Таблица 1
|
N |
|
|
|
|
Момент
инерции рамки с кубом
![]() =
=
Таблица 2
|
|
|
|
|
|
т, |
Момент инерции
рамки без куба![]() =
=
Момент инерции
куба I
=
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
| Момент инерции | |
|---|---|
 |
|
| Размерность | L2M |
| Единицы измерения | |
| СИ | кг·м² |
| СГС | г·см² |
Моме́нт ине́рции — тензорная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле. Момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества, которое, формально, может представлять собой не обязательно ось вращения (т.е. прямую), но и точку или плоскость. В последних случаях говорят о моменте инерции относительно точки или плоскости, а возникать такие величины могут в формальных вычислениях, например, при расчете тензора инерции.
Единица измерения в Международной системе единиц (СИ): кг·м².
Обозначение: I или J.
Различают несколько моментов инерции — в зависимости от типа базового множества до которого отсчитываются расстояния от элементарных масс.
Осевой момент инерции[править | править код]

Осевые моменты инерции некоторых тел
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси[1]:

где:
- mi — масса i-й точки,
- ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.

где:
- dm = ρ dV — масса малого элемента объёма тела dV,
- ρ — плотность,
- r — расстояние от элемента dV до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то

Теорема Гюйгенса — Штейнера[править | править код]
Момент инерции твёрдого тела относительно какой-либо оси зависит от массы, формы и размеров тела, а также и от положения тела по отношению к этой оси. Согласно теореме Гюйгенса — Штейнера, момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями[1]:

где m — полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:

Осевые моменты инерции некоторых тел[править | править код]
| Тело | Описание | Положение оси a | Момент инерции Ja |
|---|---|---|---|
| Материальная точка массы m | На расстоянии r от точки, неподвижная | 
|
|

|
Полый тонкостенный цилиндр или кольцо радиуса r и массы m | Ось цилиндра |
|

|
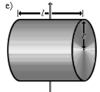
Сплошной цилиндр или диск радиуса r и массы m | Ось цилиндра | 
|
|
Полый толстостенный цилиндр массы m с внешним радиусом r2 и внутренним радиусом r1 | Ось цилиндра |  [Комм 1] [Комм 1]
|
|
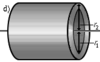
Сплошной цилиндр длины l, радиуса r и массы m | Ось перпендикулярна образующей цилиндра и проходит через его центр масс | 
|
|
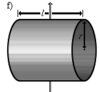
Полый тонкостенный цилиндр (кольцо) длины l, радиуса r и массы m | Ось перпендикулярна к цилиндру и проходит через его центр масс | 
|
|
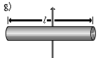
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его центр масс | 
|

|
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его конец | 
|

|
Тонкостенная сфера радиуса r и массы m | Ось проходит через центр сферы | 
|

|
Шар радиуса r и массы m | Ось проходит через центр шара | 
|

|
Конус радиуса r и массы m | Ось конуса | 
|
| Равнобедренный треугольник с высотой h, основанием a и массой m | Ось перпендикулярна плоскости треугольника и проходит через вершину (при высоте) | 
|
|
| Правильный треугольник со стороной a и массой m | Ось перпендикулярна плоскости треугольника и проходит через центр масс | 
|
|
| Квадрат со стороной a и массой m | Ось перпендикулярна плоскости квадрата и проходит через центр масс | 
|
|
| Прямоугольник со сторонами a и b и массой m | Ось перпендикулярна плоскости прямоугольника и проходит через центр масс | 
|
|
| Правильный n-угольник радиуса r и массой m | Ось перпендикулярна плоскости и проходит через центр масс | ![{displaystyle {frac {mr^{2}}{6}}left[1+2cos(pi /n)^{2}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bf60937eb16b822e5b6212250fa8f13c794f3cb)
|
|

|
Тор (полый) с радиусом направляющей окружности R, радиусом образующей окружности r и массой m | Ось перпендикулярна плоскости направляющей окружности тора и проходит через центр масс | 
|
Вывод формул[править | править код]
Тонкостенный цилиндр (кольцо, обруч)
Вывод формулы
Момент инерции тела равен сумме моментов инерции составляющих его частей. Разобьём тонкостенный цилиндр на элементы с массой dm и моментами инерции dJi. Тогда

Поскольку все элементы тонкостенного цилиндра находятся на одинаковом расстоянии от оси вращения, формула (1) преобразуется к виду

Толстостенный цилиндр (кольцо, обруч)
Вывод формулы
Пусть имеется однородное кольцо с внешним радиусом R, внутренним радиусом R1, толщиной h и плотностью ρ. Разобьём его на тонкие кольца толщиной dr. Масса и момент инерции тонкого кольца радиуса r составит

Момент инерции толстого кольца найдём как интеграл


Поскольку объём и масса кольца равны

получаем окончательную формулу для момента инерции кольца

Однородный диск (сплошной цилиндр)
Вывод формулы
Рассматривая цилиндр (диск) как кольцо с нулевым внутренним радиусом (R1 = 0), получим формулу для момента инерции цилиндра (диска):

Сплошной конус
Вывод формулы
Разобьём конус на тонкие диски толщиной dh, перпендикулярные оси конуса. Радиус такого диска равен

где R – радиус основания конуса, H – высота конуса, h – расстояние от вершины конуса до диска.
Масса и момент инерции такого диска составят


Интегрируя, получим

Сплошной однородный шар
Вывод формулы
Разобьём шар на тонкие диски толщиной dh, перпендикулярные оси вращения. Радиус такого диска, расположенного на высоте h от центра сферы, найдём по формуле

Масса и момент инерции такого диска составят

Момент инерции шара найдём интегрированием:

Тонкостенная сфера
Вывод формулы
Для вывода воспользуемся формулой момента инерции однородного шара радиуса R:

Вычислим, насколько изменится момент инерции шара, если при неизменной плотности ρ его радиус увеличится на бесконечно малую величину dR.

Тонкий стержень (ось проходит через центр)
Вывод формулы
Разобьём стержень на малые фрагменты длиной dr. Масса и момент инерции такого фрагмента равна

Интегрируя, получим

Тонкий стержень (ось проходит через конец)
Вывод формулы
При перемещении оси вращения из середины стержня на его конец, центр тяжести стержня перемещается относительно оси на расстояние l⁄2. По теореме Штейнера новый момент инерции будет равен

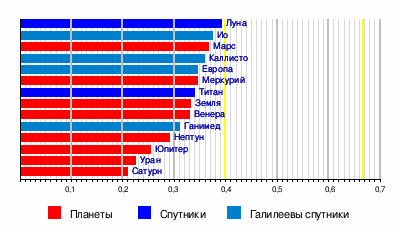
Безразмерные моменты инерции планет и их спутников[2][3][4]
Безразмерные моменты инерции планет и спутников[править | править код]
Большое значение для исследований внутренней структуры планет и их спутников имеют их безразмерные моменты инерции. Безразмерный момент инерции тела радиуса r и массы m равен отношению его момента инерции относительно оси вращения к моменту инерции материальной точки той же массы относительно неподвижной оси вращения, расположенной на расстоянии r (равному mr2). Эта величина отражает распределение массы по глубине. Одним из методов её измерения у планет и спутников является определение доплеровского смещения радиосигнала, передаваемого АМС, пролетающей около данной планеты или спутника. Для тонкостенной сферы безразмерный момент инерции равен 2/3 (~0,67), для однородного шара — 0,4, и вообще тем меньше, чем большая масса тела сосредоточена у его центра. Например, у Луны безразмерный момент инерции близок к 0,4 (равен 0,391), поэтому предполагают, что она относительно однородна, её плотность с глубиной меняется мало. Безразмерный момент инерции Земли меньше, чем у однородного шара (равен 0,335), что является аргументом в пользу существования у неё плотного ядра[5][6].
Центробежный момент инерции[править | править код]
Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины[1][7]:



где x, y и z — координаты малого элемента тела объёмом dV, плотностью ρ и массой dm.
Ось OX называется главной осью инерции тела, если центробежные моменты инерции Jxy и Jxz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции данного тела[7].
Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела, а моменты инерции относительно этих осей — его главными центральными моментами инерции. Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции[7].
Геометрические моменты инерции[править | править код]
Геометрический момент инерции объёма относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где, как и ранее r — расстояние от элемента dV до оси a.
Размерность JVa — длина в пятой степени ( ), соответственно единица измерения СИ — м5.
), соответственно единица измерения СИ — м5.
Геометрический момент инерции площади относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где интегрирование выполняется по поверхности S, а dS — элемент этой поверхности.
Размерность JSa — длина в четвёртой степени ( ), соответственно единица измерения СИ — м4. В строительных расчетах, литературе и сортаментах металлопроката часто указывается в см4.
), соответственно единица измерения СИ — м4. В строительных расчетах, литературе и сортаментах металлопроката часто указывается в см4.
Через геометрический момент инерции площади выражается момент сопротивления сечения:

Здесь rmax — максимальное расстояние от поверхности до оси.
| Геометрические моменты инерции площади некоторых фигур | |
|---|---|
Прямоугольника высотой  и шириной и шириной  : :
|

|
Прямоугольного коробчатого сечения высотой и шириной по внешним контурам  и и  , а по внутренним и соответственно , а по внутренним и соответственно
|

|
Круга диаметром 
|

|


Момент инерции относительно плоскости[править | править код]
Моментом инерции твёрдого тела относительно некоторой плоскости называют скалярную величину, равную сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до рассматриваемой плоскости[9].
Если через произвольную точку  провести координатные оси
провести координатные оси  , то моменты инерции относительно координатных плоскостей
, то моменты инерции относительно координатных плоскостей  ,
,  и
и  будут выражаться формулами:
будут выражаться формулами:



В случае сплошного тела суммирование заменяется интегрированием.
Центральный момент инерции[править | править код]
Центральный момент инерции (момент инерции относительно точки O, момент инерции относительно полюса, полярный момент инерции)  — это величина, определяемая выражением[9]:
— это величина, определяемая выражением[9]:
где:
Центральный момент инерции можно выразить через главные осевые моменты инерции, а также через моменты инерции относительно плоскостей[9]:


Тензор инерции и эллипсоид инерции[править | править код]
Момент инерции тела относительно произвольной оси, проходящей через центр масс и имеющей направление, заданное единичным вектором  , можно представить в виде квадратичной (билинейной) формы:
, можно представить в виде квадратичной (билинейной) формы:
 (1)
(1)

где  — тензор инерции. Матрица тензора инерции симметрична, имеет размеры
— тензор инерции. Матрица тензора инерции симметрична, имеет размеры  и состоит из компонент центробежных моментов:
и состоит из компонент центробежных моментов:



Выбором соответствующей системы координат матрица тензора инерции может быть приведена к диагональному виду. Для этого нужно решить задачу о собственных значениях для матрицы тензора :


где  — ортогональная матрица перехода в собственный базис тензора инерции. В собственном базисе координатные оси направлены вдоль главных осей тензора инерции, а также совпадают с главными полуосями эллипсоида тензора инерции. Величины
— ортогональная матрица перехода в собственный базис тензора инерции. В собственном базисе координатные оси направлены вдоль главных осей тензора инерции, а также совпадают с главными полуосями эллипсоида тензора инерции. Величины  — главные моменты инерции. Выражение (1) в собственной системе координат имеет вид:
— главные моменты инерции. Выражение (1) в собственной системе координат имеет вид:

откуда получается уравнение эллипсоида в собственных координатах. Разделив обе части уравнения на 

и произведя замены:

получаем канонический вид уравнения эллипсоида в координатах  :
:

Расстояние от центра эллипсоида до некоторой его точки связано со значением момента инерции тела вдоль прямой, проходящей через центр эллипсоида и эту точку:

См. также[править | править код]
- Кинематика твёрдого тела
- Метод главных компонент
- Сопротивление материалов
- Теорема Штейнера
- Теорема Кёнига (механика)
- Механические приложения тройного интеграла
- Механические приложения двойного интеграла
- Полярный момент инерции
- Список моментов инерции
- Момент силы
- Момент импульса
Комментарии[править | править код]
- ↑ При получении этой формулы путём вычитания момента инерции сплошного цилиндра радиусом r1 из цилиндра радиусом r2 необходимо обратить внимание, что их массы при этом не будут одинаковыми или равны m. При этом должно выполняться условие . Из формулы для массы соответствующего цилиндра можно определить, что в этом случае и . В правильности использования знака «+» в этой формуле также можно убедиться, если сравнить моменты инерции полого толстостенного и сплошного цилиндров с одинаковыми массами. Действительно, у первого из этих цилиндров масса в среднем сосредоточена дальше от оси, чем у второго, поэтому и момент инерции этого цилиндра должен быть больше, чем у сплошного. Именно такое соотношение моментов инерции и обеспечивает знак «+». С другой стороны, в пределе при стремлении r1 к r2 формула для полого толстостенного цилиндра должна приобрести тот же вид, что и формула для полого тонкостенного цилиндра. Очевидно, что такой переход происходит только при использовании формулы со знаком «+».



Примечания[править | править код]
- ↑ 1 2 3 Тарг С. М. Момент инерции // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1992. — Т. 3. — С. 206—207. — 672 с. — 48 000 экз. — ISBN 5-85270-019-3.
- ↑ Planetary Fact Sheet. Дата обращения: 31 августа 2010. Архивировано 14 марта 2016 года.
- ↑ Showman, Adam P.; Malhotra, Renu. The Galilean Satellites (англ.) // Science. — 1999. — Vol. 286, no. 5437. — P. 77—84. — doi:10.1126/science.286.5437.77. — PMID 10506564.
- ↑ Margot, Jean-Luc; et al. Mercury’s moment of inertia from spin and gravity data (англ.) // Journal of Geophysical Research (англ.) (рус. : journal. — 2012. — Vol. 117. — doi:10.1029/2012JE004161.
- ↑ Галкин И.Н. Внеземная сейсмология. — М.: Наука, 1988. — С. 42-73. — 195 с. — (Планета Земля и Вселенная). — 15 000 экз. — ISBN 502005951X.
- ↑ Пантелеев В. Л. Физика Земли и планет. Гл. 3.4 — Гравитационное поле планеты. Дата обращения: 31 августа 2010. Архивировано 3 октября 2013 года.
- ↑ 1 2 3 Тарг С. М. Краткий курс теоретической механики. — М.: «Высшая школа», 1995. — С. 269—271. — 416 с. — ISBN 5-06-003117-9.
- ↑ 1 2 Бухгольц Н. Н. Основной курс теоретической механики. — 4-е изд. — М.: «Наука», 1966. — Т. 2. — С. 131.
- ↑ 1 2 3 Яблонский А. А. Динамика // Курс теоретической механики. — 3-е изд. — М.: «Высшая школа», 1966. — Т. II. — С. 102—103. — 411 с.
Литература[править | править код]
- Матвеев. А. Н. Механика и теория относительности. М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Трофимова Т. И. Курс физики. — 7-е изд. — М.: Высшая школа, 2001. — 542 с.
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. Архивная копия от 7 января 2014 на Wayback Machine Издательство Физического факультета МГУ, 1997.
- Павленко Ю. Г. Лекции по теоретической механике. М.: ФИЗМАТЛИТ, 2002. — 392с.
- Яворский Б. М., Детлаф А. А. Физика для школьников старших классов и поступающих в вузы: учебное пособие — М.: Дрофа, 2002, 800с. ISBN 5-7107-5956-3
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560 с.
- Беляев Н. М. Сопротивление материалов. Главная редакция физико-математической литературы изд-ва «Наука», 1976. — 608 с.
Ссылки[править | править код]
- Определение момента инерции тел простой формы.
Часто мы слышим выражения: «он инертный», «двигаться по инерции», «момент инерции». В переносном значении слово «инерция» может трактоваться как отсутствие инициативы и действий. Нас же интересует прямое значение.
Ежедневная рассылка с полезной информацией для студентов всех направлений – на нашем телеграм-канале.
Что такое инерция
Согласно определению инерция в физике – это способность тел сохранять состояние покоя или движения в отсутствие действия внешних сил.
Если с самим понятием инерции все понятно на интуитивном уровне, то момент инерции – отдельный вопрос. Согласитесь, сложно представить в уме, что это такое. В этой статье Вы научитесь решать базовые задачи на тему «Момент инерции».
Определение момента инерции
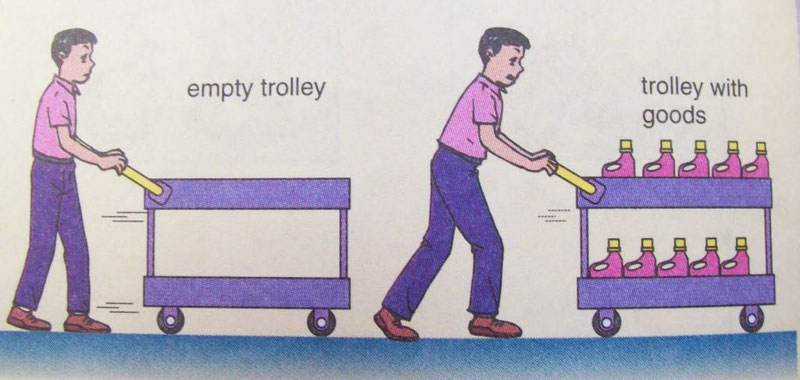
Из школьного курса известно, что масса – мера инертности тела. Если мы толкнем две тележки разной массы, то остановить сложнее будет ту, которая тяжелее. То есть чем больше масса, тем большее внешнее воздействие необходимо, чтобы изменить движение тела. Рассмотренное относится к поступательному движению, когда тележка из примера движется по прямой.
По аналогии с массой и поступательным движением момент инерции – это мера инертности тела при вращательном движении вокруг оси.
Момент инерции – скалярная физическая величина, мера инертности тела при вращении вокруг оси. Обозначается буквой J и в системе СИ измеряется в килограммах, умноженных на квадратный метр.
Как посчитать момент инерции? Есть общая формула, по которой в физике вычисляется момент инерции любого тела. Если тело разбить на бесконечно малые кусочки массой dm, то момент инерции будет равен сумме произведений этих элементарных масс на квадрат расстояния до оси вращения.

Это общая формула для момента инерции в физике. Для материальной точки массы m, вращающейся вокруг оси на расстоянии r от нее, данная формула принимает вид:
Теорема Штейнера
От чего зависит момент инерции? От массы, положения оси вращения, формы и размеров тела.
Теорема Гюйгенса-Штейнера – очень важная теорема, которую часто используют при решении задач.
Кстати! Для наших читателей сейчас действует скидка 10% на любой вид работы
Теорема Гюйгенса-Штейнера гласит:
Момент инерции тела относительно произвольной оси равняется сумме момента инерции тела относительно оси, проходящей через центр масс параллельно произвольной оси и произведения массы тела на квадрат расстояния между осями.
Для тех, кто не хочет постоянно интегрировать при решении задач на нахождение момента инерции, приведем рисунок с указанием моментов инерции некоторых однородных тел, которые часто встречаются в задачах:

Пример решения задачи на нахождение момента инерции
Рассмотрим два примера. Первая задача – на нахождение момента инерции. Вторая задача – на использование теоремы Гюйгенса-Штейнера.
Задача 1. Найти момент инерции однородного диска массы m и радиуса R. Ось вращения проходит через центр диска.
Решение:
Разобьем диск на бесконечно тонкие кольца, радиус которых меняется от 0 до R и рассмотрим одно такое кольцо. Пусть его радиус – r, а масса – dm. Тогда момент инерции кольца:
Массу кольца можно представить в виде:

Здесь dz – высота кольца. Подставим массу в формулу для момента инерции и проинтегрируем:

В итоге получилась формула для момента инерции абсолютного тонкого диска или цилиндра.
Задача 2. Пусть опять есть диск массы m и радиуса R. Теперь нужно найти момент инерции диска относительно оси, проходящей через середину одного из его радиусов.
Решение:
Момент инерции диска относительно оси, проходящей через центр масс, известен из предыдущей задачи. Применим теорему Штейнера и найдем:
Кстати, в нашем блоге Вы можете найти и другие полезные материалы по физике и решению задач.
Надеемся, что Вы найдете в статье что-то полезное для себя. Если в процессе расчета тензора инерции возникают трудности, не забывайте о студенческом сервисе. Наши специалисты проконсультируют по любому вопросу и помогут решить задачу в считанные минуты.

Иван Колобков, известный также как Джони. Маркетолог, аналитик и копирайтер компании Zaochnik. Подающий надежды молодой писатель. Питает любовь к физике, раритетным вещам и творчеству Ч. Буковски.

В нашем обиходе довольно часто встречаются выражения « он совершенно инертный» или «его инертность заставляет задуматься». Их применяют в отношении человека, который не обладает инициативой и не привык двигаться. Существуют другие понятия такого лица, но думаю, что они больше относятся к медицине. В общем понимании это человек не любящий принимать собственных решений. Или возьмем пример из цирка, где силач под аплодисменты зрителей выдерживает валун огромной массы. Данный объект лежит совершенно спокойно и не совершает никаких движений. Напарник бьет по камню и атлету совершенно не больно. Вся причина кроется в том, что объект инертен по отношению к цирковому артисту. Если бы на месте огромного валуна был маленький камушек, был бы тот же эффект.
Также можем применить пример из жизни, когда пешеход стоит на проезжей части и наблюдает за несущимся автомобильным потоком. Тяжелогруженная машина, если решила совершить остановку начинает тормозить раньше, чем легковая и совершает движение по инерции под влиянием груза. Естественно, что грузовик продвинется гораздо дальше по сравнению с легковушкой.
Что такое инерция
В научном понимании это свойство тел находится в состоянии покоя, при этом внешние силы никакого воздействия не осуществляют. Понятие момента инерции вызывает определенный вопрос. Не каждому обывателю понятно это выражение, поэтому разберем его подробнее. Инерция, это свойство отдельного тела, лежать в спокойном состоянии при отсутствии на него внешних действий различной силы. Также объект может воспрепятствовать изменчивости скоростных показателей. Из жизни мы можем привести такой пример, когда машина находится на льду и начинает тормозить, то она не сразу останавливается, а совершает поступательное движение благодаря льду. Весь тормозной путь будет считаться инерцией. Или размешивая чай в стакане после того, как перестанем мешать, жидкость продолжает совершать вращательное движение. Это будет считаться инерцией.
Определение момента инерции
Еще со школьной скамьи нам было известно, что масса, это масса инертности тела. Если к примеру, мы совершим толчок двух вагонов у которых разный вес, то совершенно понятно, что остановить труднее будет тот вагон, у которого масса тяжелее. Одним словом, чем больше вес, тем нужно большее усилие для совершения движения. В данной ситуации мы рассматриваем поступательное движение, когда вагон совершает движение прямо.
Понятие момента инерции, включает в себя меру инертности тела при вращении вокруг своей оси. Момент инертности является физическим значением и обозначается буквой J. Измеряемость данной величины кг умноженный на метр в квадрате.
Высчитывают момент инертности при помощи следующей формулы.
Применяется она обычно в научной физике, при вычислении момента инерции тела. Если представить объект, разбившийся на несколько кусков, то момент инерции будет равняться сумме этих кусков, умноженный на квадрат расстояния к оси вращения. Так определяют момент инерции в физике. Если брать реальность, то определение происходит в результате расчетов, произведенных по формуле Штейнера.
Теорема Штейнера
Прежде всего, нам нужно понять, отчего зависит момент инерции. Ответ достаточно прост: от веса, оси вращения, формы и габаритов объекта. Теорема Штейнера имеет важное значение и студенты часто ее используют для решения различных задач. Что же она обозначает? Она имеет следующую формулировку. Момент инерции объекта относительно оси равен сумме момента инерции тела относительно оси, которая проходит через центр параллельно оси и произведения массы тела на квадрат расстояния между осями.
Немного мудреное понятие, но именно так объясняется теорема. В физике существуют разнообразные виды инерции: например, центральный или геометрический. Момент инерции является единицей измерения для тела, которое совершает вращательное движение вокруг своей оси.
Пример решения задачи
Вашему вниманию представим 2 варианта. В первом случае мы попытаемся найти момент инерции, а во втором, применим знания полученные при изучении теоремы Штейнера.
Упражнение 1. Установить момент инерции диска весом М и радиусом Р. Ось вращения соответственно расположена по центру объекта.
Оптимальное решение:
Диск делится на маленькие колечки, радиус которых изменяется от 0 до Р. Разберем более подробно отдельное кольцо. Обозначим, что его вес равен значение м, а радиус показателю р. Тогда получим момент инерции равный: DJ= DMR в квадрате.
Массу кольца можно представить в виде:
Упражнение 2. Установить момент инерции диска с массой М и радиусом Р.
Оптимальное решение:
Используя формулу Штейнера решаем упражнение, J = Jc+ мd в квадрате. Подставляем полученные данные в формулу и получаем решение.
Момент инерции неотъемлемо имеет связь с другими популярными физическими законами. Например, со вторым законом Ньютона. В данном случае момент инерции принимает значение массы.
Остались вопросы или нужна помощь, есть замечания по данной статье пишите в комментариях будем рады подискутировать, так же подписывайтесь на наш канал или другие соц сети:
ПОДПИСАТЬСЯ НА КАНАЛ I Сайт Антиплагиату НЕТ I ВКОНТАКТЕ
Динамические характеристики тела человека.
Динамические характеристики
Все движения человека и движимых им тел под действием сил изменяются по величине и направлению скорости. Чтобы раскрыть механизм движений (причины их возникновения и ход их изменения), исследуют динамические характеристики. К ним относятся инерционные характеристики (особенности самих движущихся тел) , силовые (особенности взаимодействия тел) и энергетические (состояния и изменения работоспособности, биомеханических систем) .
Инерционные характеристики раскрывают, каковы особенности тела человека и движимых им тел в их взаимодействиях. От инерционных характеристик зависит сохранение и изменение скорости.
Все физические тела обладают свойством инертности (или инерции), которое проявляется в сохранении движения, а также в особенностях изменения его под действием сил.
Понятие инерции раскрывается в первом законе Ньютона: “Всякое тело сохраняет свое состояние покоя или равномерного и прямолинейного движения до тех пор, пока внешние приложенные силы не заставят его изменить это состояние”.
Говоря проще: тело сохраняет свою скорость, а также под действием внешних сил изменяет ее.
Масса – это мера инертности тела при поступательном движении. Она измеряется отношением величины приложенной силы к вызываемому ею ускорению.
Масса тела характеризует, как именно приложенная сила может изменить движение тела. Одна и та же сила вызовет большее ускорение у тела с меньшей массой, чем у тела с большей массой.
Момент инерции – это мера инертности тела при вращательном движении. Момент инерции тела относительно оси равен сумме произведений масс веек его частиц на квадраты их расстояний от данной оси вращения.
Отсюда видно, что момент инерции тела больше, когда его частицы дальше от оси вращения, а значит угловое ускорение тела под действием того же момента силы меньше; если частицы ближе к оси, то угловое ускорение больше, а момент инерции меньше. Значит, если приблизить тело к оси, то легче вызвать угловое ускорение, легче разогнать тело во вращении, легче и остановить его. Этим пользуются при движении вокруг оси.
Силовые характеристики. Известно, что движение тела может происходить как под действием приложенной к нему движущей силы, так и без движущей силы (по инерции), когда приложена только тормозящая сила. Движущие силы приложены не всегда; без тормозящих же сил движения не бывает. Изменение движений происходит под действием сил. Сила не причина движения, а причина изменения движения; силовые характеристики раскрывают связь действия силы с изменением движения.
Сила — это мера механического воздействия одного тела на другое в данный момент времени. Численно она определяется произведением массы тела и его ускорения, вызванного данной силой.
Чаще всего говорят про силу и результат ее действия, но это применимо только к простейшему поступательному движению тела. В движениях человека как системы тел, где все движения частей тела вращательные, изменение вращательного движения зависит не от силы, а от момента силы.
Момент силы – это мера вращающего действия силы на тело. Он определяется произведением силы на ее плечо.
Момент силы обычно считают положительным, когда сила вызывает поворот тела против часовой стрелки, и отрицательным при повороте по часовой стрелке.
Чтобы сила могла проявить свое вращающее действие, она должна иметь плечо. Иначе говоря, она не должна проходить через ось вращения.
Определение силы или момента силы, если известна масса или момент инерции, позволяет узнать только ускорение, т.е. как быстро изменяется скорость. Надо еще узнать, насколько именно изменится скорость. Для этого должно быть известно, как долго была приложена сила. Иначе говоря, следует определить импульс силы (или ее момента) .
Импульс силы – это мера воздействия силы на тело за данный промежуток времени (в поступательном движении) . Он равен произведению силы и продолжительности ее действия.
Любая сила, приложенная даже в малые доли секунды (например: удар по мячу) , имеет импульс. Именно импульс силы определяет изменение скорости, силой же обусловлено только ускорение.
Во вращательном движении момент силы, действуя в течение определенного времени, создает импульс момента силы.
Импульс момента силы — это мера воздействия момента силы относительно данной оси за данный промежуток времени (во вращательном движении) .
Вследствие импульса как силы, так и момента силы возникают изменения движения, зависящие от инерционных свойств тела и проявляющиеся в изменении скорости (количество движения, кинетический момент) .
Количество движения — это мера поступательного движения тела, характеризующая его способность передаваться другому телу в виде механического движения. Количество движения тела измеряется произведением массы тела на его скорость.
Кинетический момент (момент количества движения) – это мера вращательного движения тела, характеризующая его способность передаваться другому телу в виде механического движения. Кинетический момент равен произведению момента инерции относительно оси вращения на угловую скорость тела.
Соответствующее изменение количества движения происходит под действием импульса силы, а под действием импульса момента силы происходит определенное изменение кинетического момента (момента количества движения) .
Таким образом, к ранее рассмотренным кинематическим мерам изменения движения (скорости и ускорению) добавляются динамические меры изменения движения (количество движения и кинетический момент) . Совместно с мерами действия сил они отражают взаимосвязь сил и движения. Изучение их помогает понять физические основы двигательных действий человека.
Энергетические характеристики. При движениях человека силы, приложенные к его телу на некотором пути, совершают работу и изменяют положение и скорость звеньев тела, что изменяет его энергию. Работа характеризует процесс, при котором меняется энергия системы. Энергия же характеризует состояние системы, изменяющейся вследствие работы. Энергетические характеристики показывают, как меняются виды энергии при движениях и протекает сам процесс изменения энергии.
Работа силы – это мера действия силы на тело при некотором его перемещении под действием этой силы. Она равна произведению модуля силы и перемещения точки приложения силы.
Если сила направлена в сторону движения (или под острым углом к этому направлению) , то она совершает положительную работу, увеличивая энергию движения тела. Когда же сила направлена навстречу движению (или под тупым углом к его направлению) , то работа силы отрицательная и энергия движения тела уменьшается.
Работа момента силы — это мера воздействия момента силы на тело на данном пути (во вращательном движении) . Она равна произведению модуля момента силы и угла поворота.
Понятие работы представляет собой меру внешних воздействий, приложенных к телу на определенном пути, вызывающих изменения механического состояния тела.
Энергия – это запас работоспособности системы. Механическая энергия определяется скоростями движений тел в системе и их взаимным расположением; значит, это энергия перемещения и взаимодействия.
Кинетическая энергия тела – это энергия его механического движения, определяющая возможность совершить работу. При поступательном движении она измеряется половиной произведения массы тела на квадрат его скорости, при вращательном движении половиной произведения момента инерции на квадрат его угловой скорости.
Потенциальная энергия тела -это энергия его положения, обусловленная взаимным относительным расположением тел или частей одного и того же тела и характером их взаимодействия. Потенциальная энергия в поле сил тяжести определяется произведением силы тяжести на разность уровней начального и конечного положения над землей (относительно которого определяется энергия) .
Энергия как мера движения материи переходит из одного вида в другой. Так, химическая энергия в мышцах превращается в механическую (внутреннюю потенциальную упруго-деформированных мышц). Порожденная последней сила тяги мышц совершает работу и преобразует потенциальную энергию в кинетическую энергию движущихся звеньев тела и внешних тел. Механическая энергия внешних тел (кинетическая) , передаваясь при их действии на тело человека его звеньям, преобразуется в потенциальную энергию растягиваемых мышц-антаганистов и в рассеивающуюся тепловую энергию.
