Часто мы слышим выражения: «он инертный», «двигаться по инерции», «момент инерции». В переносном значении слово «инерция» может трактоваться как отсутствие инициативы и действий. Нас же интересует прямое значение.
Ежедневная рассылка с полезной информацией для студентов всех направлений – на нашем телеграм-канале.
Что такое инерция
Согласно определению инерция в физике – это способность тел сохранять состояние покоя или движения в отсутствие действия внешних сил.
Если с самим понятием инерции все понятно на интуитивном уровне, то момент инерции – отдельный вопрос. Согласитесь, сложно представить в уме, что это такое. В этой статье Вы научитесь решать базовые задачи на тему «Момент инерции».
Определение момента инерции
Из школьного курса известно, что масса – мера инертности тела. Если мы толкнем две тележки разной массы, то остановить сложнее будет ту, которая тяжелее. То есть чем больше масса, тем большее внешнее воздействие необходимо, чтобы изменить движение тела. Рассмотренное относится к поступательному движению, когда тележка из примера движется по прямой.
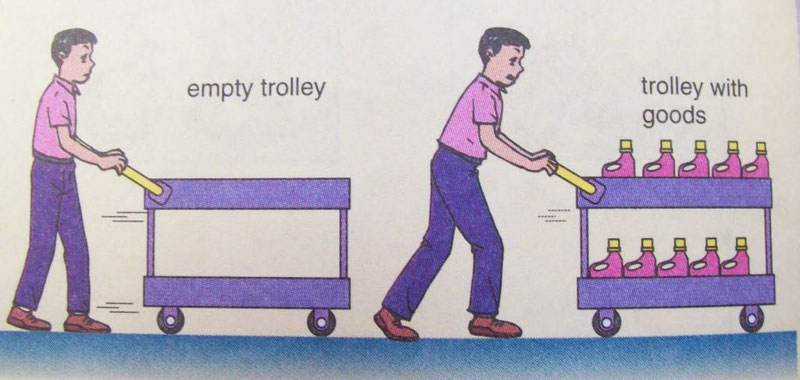
По аналогии с массой и поступательным движением момент инерции – это мера инертности тела при вращательном движении вокруг оси.
Момент инерции – скалярная физическая величина, мера инертности тела при вращении вокруг оси. Обозначается буквой J и в системе СИ измеряется в килограммах, умноженных на квадратный метр.
Как посчитать момент инерции? Есть общая формула, по которой в физике вычисляется момент инерции любого тела. Если тело разбить на бесконечно малые кусочки массой dm, то момент инерции будет равен сумме произведений этих элементарных масс на квадрат расстояния до оси вращения.

Это общая формула для момента инерции в физике. Для материальной точки массы m, вращающейся вокруг оси на расстоянии r от нее, данная формула принимает вид:
Теорема Штейнера
От чего зависит момент инерции? От массы, положения оси вращения, формы и размеров тела.
Теорема Гюйгенса-Штейнера – очень важная теорема, которую часто используют при решении задач.
Кстати! Для наших читателей сейчас действует скидка 10% на любой вид работы
Теорема Гюйгенса-Штейнера гласит:
Момент инерции тела относительно произвольной оси равняется сумме момента инерции тела относительно оси, проходящей через центр масс параллельно произвольной оси и произведения массы тела на квадрат расстояния между осями.
Для тех, кто не хочет постоянно интегрировать при решении задач на нахождение момента инерции, приведем рисунок с указанием моментов инерции некоторых однородных тел, которые часто встречаются в задачах:

Пример решения задачи на нахождение момента инерции
Рассмотрим два примера. Первая задача – на нахождение момента инерции. Вторая задача – на использование теоремы Гюйгенса-Штейнера.
Задача 1. Найти момент инерции однородного диска массы m и радиуса R. Ось вращения проходит через центр диска.
Решение:
Разобьем диск на бесконечно тонкие кольца, радиус которых меняется от 0 до R и рассмотрим одно такое кольцо. Пусть его радиус – r, а масса – dm. Тогда момент инерции кольца:
Массу кольца можно представить в виде:

Здесь dz – высота кольца. Подставим массу в формулу для момента инерции и проинтегрируем:

В итоге получилась формула для момента инерции абсолютного тонкого диска или цилиндра.
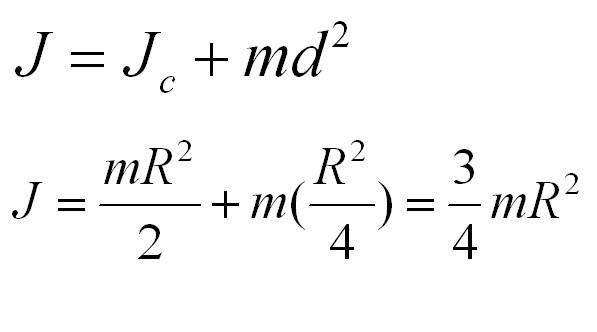
Задача 2. Пусть опять есть диск массы m и радиуса R. Теперь нужно найти момент инерции диска относительно оси, проходящей через середину одного из его радиусов.
Решение:
Момент инерции диска относительно оси, проходящей через центр масс, известен из предыдущей задачи. Применим теорему Штейнера и найдем:
Кстати, в нашем блоге Вы можете найти и другие полезные материалы по физике и решению задач.
Надеемся, что Вы найдете в статье что-то полезное для себя. Если в процессе расчета тензора инерции возникают трудности, не забывайте о студенческом сервисе. Наши специалисты проконсультируют по любому вопросу и помогут решить задачу в считанные минуты.

Иван Колобков, известный также как Джони. Маркетолог, аналитик и копирайтер компании Zaochnik. Подающий надежды молодой писатель. Питает любовь к физике, раритетным вещам и творчеству Ч. Буковски.
Любые перемещения тел в пространстве, траектория которых является окружностью, предполагают знание не только угловой скорости, но и момента инерции для описания этого движения. Что такое момент инерции, а также чему он равен для стержня и колеса, ответит данная статья.
Вращение и момент инерции
Физическая величина, которая называется моментом инерции, обозначается, как правило, буквой I и появляется в физике при рассмотрении момента импульса материальной точки, которая вращается вокруг оси. Момент импульса L в скалярной форме записывается следующим выражением:
L = r*m*v
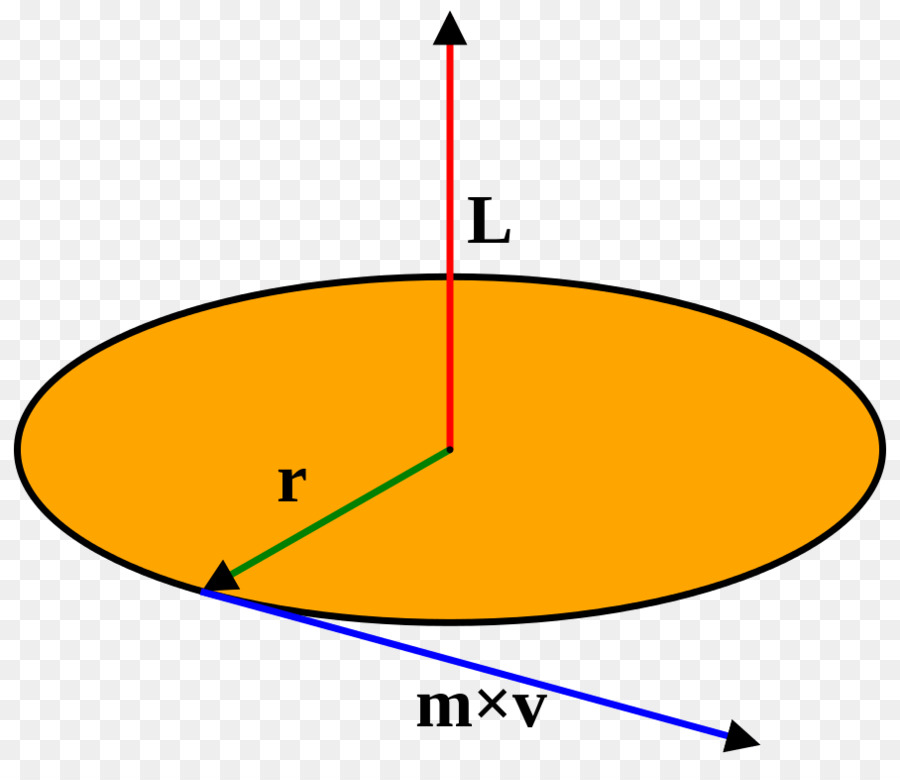
Здесь r – дистанция до оси материальной точки, m – ее масса, v – линейная скорость. Используя связь последней со скоростью угловой ω, получаем выражение:
L = r2*m*ω, где ω = v/r
Отвечая на вопрос о том, что такое момент инерции, следует сказать, что это величина I = r2*m. То есть она зависит от массы вращающегося объекта, быстро растет с увеличением расстояния до оси и измеряется в кг*м2.
Общее выражение для момента инерции
Введенная в предыдущем пункте формула для величины I справедлива, если размеры объекта пренебрежимо малы по сравнению с дистанцией до оси r (вращение Земли вокруг нашей звезды). Если же линейные размеры объекта становятся сравнимыми с расстоянием r, тогда необходимо для вычисления I пользоваться более общей формулой, которая дана ниже:
I = ∫m(r2*dm)
Из нее видно, что подынтегральное выражение представляет собой момент инерции материальной точки. Сумма же всех моментов от точек с массой dm составляет полный момент инерции I для всего тела.
Эта формула является мощным инструментом для определения I тела абсолютно любой формы. Согласно формуле величина I является аддитивной, то есть позволяет разбить тело на отдельные части, вычислить их моменты инерции, а затем сложить полученные результаты для получения величины I тела.
Физический смысл величины I
Зная, что такое момент инерции, необходимо сказать несколько слов о том, как его значение отражается на поведении и характеристиках вращения реальных объектов.
Большая величина I приводит к тому, что тело очень тяжело раскрутить вокруг оси. Для этого приходится выполнить значительную работу и приложить существенные усилия. Примером тела с большим I является автомобильный маховик – тяжелый металлический диск, жестко закрепленный на коленвале двигателя. Наоборот, если величина I системы невелика, то ее можно быстро раскрутить и так же быстро и легко остановить. Примером для этого случая является алюминиевый обод велосипедного колеса.
Приведенное выше обсуждение говорит о том, что момент инерции характеризуется инерционностью процесса вращения, то есть выполняет ту же самую роль, что и масса тела при приложении к ней силы с целью придания ускорения.
Отличие массы и момента инерции заключается не только в единицах измерения, но и в том, что последний является функцией вращательной системы, а не только геометрии тела и его массы.
Момент инерции относительно оси вращения, пересекающей центр масс стержня
Рассмотрим пример использования интегральной формулы для решения реальных задач. Первым делом решим простую проблему: имеется стержень тонкий длиной l и массой m. Вращения оси проходит перпендикулярно этому стержню через центр массы объекта. Необходимо определить величину I для этой системы.

Выпишем общую формулу для инерции момента стержня относительно оси, имеем:
I = ∫m(r2*dm)
Поскольку ось перпендикулярна рассматриваемому телу, и сам стержень имеет бесконечно малую толщину, то можно мысленно разрезать его на тонкие слои плоскостями, параллельными оси. В таком случае получаем, что элемент массой dm может быть представлен следующим равенством:
dm = ρ*S*dr
Здесь ρ – плотность материала, S – поперечное сечение, которое является постоянной величиной и стремится к нулю (стержень бесконечно тонкий). Подставим это выражение в общую формулу:
I = ρ*S*∫+l/2-l/2(r2*dr)
Заметим, что подставленные пределы интегрирования по r соответствуют условию задачи (ось делит стержень на две равные части). Выполняя интегрирование, получаем:
I = ρ*S*(r3/3)|+l/2-l/2 = m*l2/12, где m = ρ*S*l
Таким образом, момент инерции стержня тонкого, когда ось проходит через центр масс, в 12 раз меньше такового для материальной точки той же массы, находящейся на расстоянии l от оси.
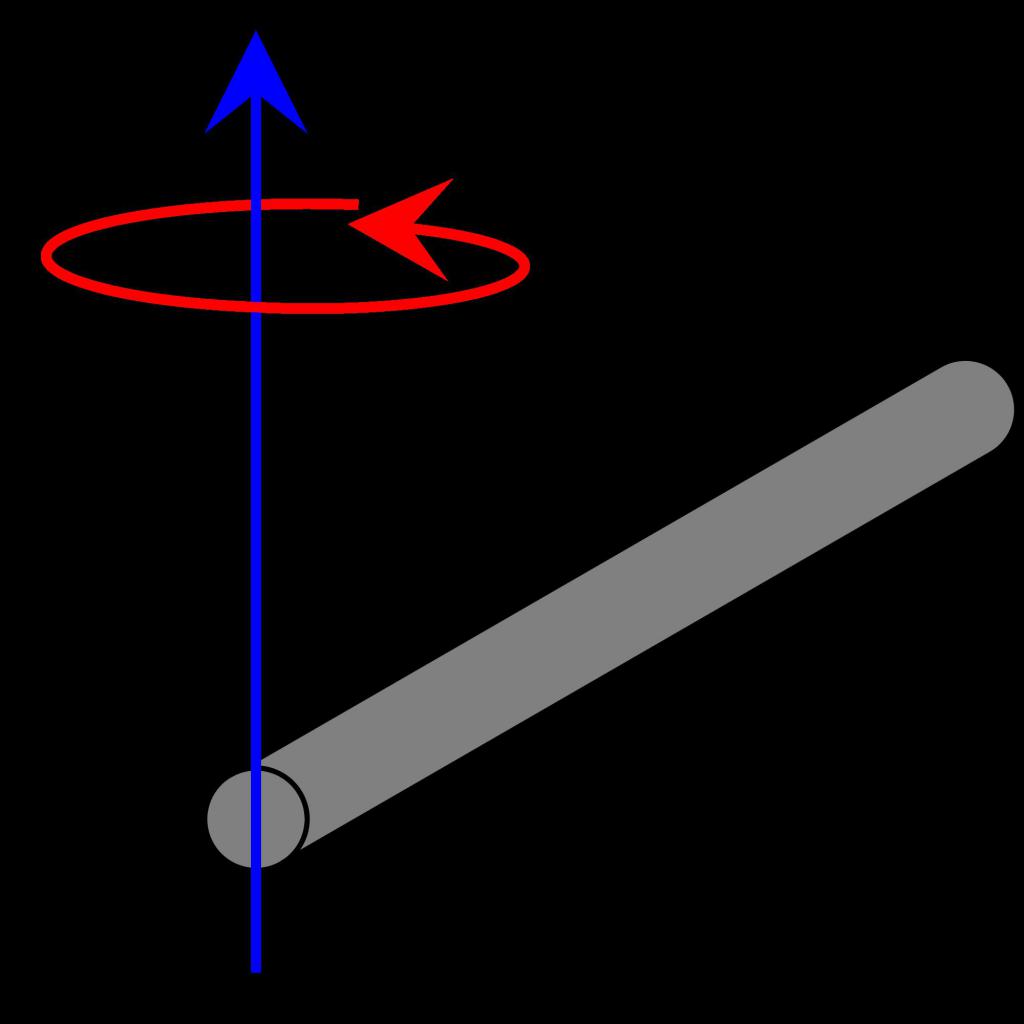
Величина I для стержня с осью вращения на конце объекта
Рассмотрим, что такое момент инерции, в несколько иной ситуации. Имеем тот же самый объект (тонкий стержень), но теперь ось проходит через конец. Как изменится момент инерции в этом случае? Применяем тот же метод разбиения стержня и последующего интегрирования, как в предыдущем пункте, получаем:
I = ρ*S*∫l0(r2*dr)
Заметим, что изменились лишь пределы интегрирования. Решением будет следующее равенство:
I = m*l2/3
Выражение показывает, что тот же самый стержень будет обладать в 4 раза большим моментом инерции (труднее раскрутить), если ось вращения переместить с его центра на край.
Рассматривая решение этих двух задач, следует сделать важный вывод: при расчете величины I нельзя сводить всю массу объекта в его центр и выполнять расчет, как для материальной точки. Вычисление следует проводить только с использованием интегрального выражения.
Значение I для колеса со спицами
Момент инерции колеса можно определить, используя свойство аддитивности рассматриваемой величины. Для этого мысленно разберем колесо на отдельные части, которые представляют собой спицы и обод. Поскольку спица – это тонкий стержень, и ось ее вращения проходит через конец, то для нее справедлива формула, полученная в предыдущем пункте.
Что касается обода колеса, то его момент инерции аналогичен таковому для материальной точки, находящейся на расстоянии радиуса колеса и имеющей массу обода.

Складывая моменты инерции всех элементов, получаем:
I = n*mc*r2/3 + mo*r2
Здесь mc и mo – массы спицы и обода, соответственно, n – число спиц. Если все спицы весят намного меньше обода, тогда момент инерции колеса будет равен:
I =mo*r2, если n*mc<<mo
Знание величины I для колеса является важным при расчете скорости угловой и момента импульса вращения колес любого транспортного средства (автомобиля, велосипеда).
| Момент инерции | |
|---|---|
 |
|
| Размерность | L2M |
| Единицы измерения | |
| СИ | кг·м² |
| СГС | г·см² |
Моме́нт ине́рции — тензорная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле. Момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества, которое, формально, может представлять собой не обязательно ось вращения (т.е. прямую), но и точку или плоскость. В последних случаях говорят о моменте инерции относительно точки или плоскости, а возникать такие величины могут в формальных вычислениях, например, при расчете тензора инерции.
Единица измерения в Международной системе единиц (СИ): кг·м².
Обозначение: I или J.
Различают несколько моментов инерции — в зависимости от типа базового множества до которого отсчитываются расстояния от элементарных масс.
Осевой момент инерции[править | править код]

Осевые моменты инерции некоторых тел
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси[1]:

где:
- mi — масса i-й точки,
- ri — расстояние от i-й точки до оси.
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.

где:
- dm = ρ dV — масса малого элемента объёма тела dV,
- ρ — плотность,
- r — расстояние от элемента dV до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то

Теорема Гюйгенса — Штейнера[править | править код]
Момент инерции твёрдого тела относительно какой-либо оси зависит от массы, формы и размеров тела, а также и от положения тела по отношению к этой оси. Согласно теореме Гюйгенса — Штейнера, момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями[1]:

где m — полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:

Осевые моменты инерции некоторых тел[править | править код]
| Тело | Описание | Положение оси a | Момент инерции Ja |
|---|---|---|---|
| Материальная точка массы m | На расстоянии r от точки, неподвижная | 
|
|

|
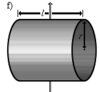
Полый тонкостенный цилиндр или кольцо радиуса r и массы m | Ось цилиндра |
|

|
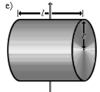
Сплошной цилиндр или диск радиуса r и массы m | Ось цилиндра | 
|
|
Полый толстостенный цилиндр массы m с внешним радиусом r2 и внутренним радиусом r1 | Ось цилиндра |  [Комм 1] [Комм 1]
|
|
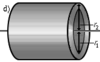
Сплошной цилиндр длины l, радиуса r и массы m | Ось перпендикулярна образующей цилиндра и проходит через его центр масс | 
|
|
Полый тонкостенный цилиндр (кольцо) длины l, радиуса r и массы m | Ось перпендикулярна к цилиндру и проходит через его центр масс | 
|
|
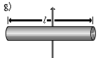
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его центр масс | 
|

|
Прямой тонкий стержень длины l и массы m | Ось перпендикулярна к стержню и проходит через его конец | 
|

|
Тонкостенная сфера радиуса r и массы m | Ось проходит через центр сферы | 
|

|
Шар радиуса r и массы m | Ось проходит через центр шара | 
|

|
Конус радиуса r и массы m | Ось конуса | 
|
| Равнобедренный треугольник с высотой h, основанием a и массой m | Ось перпендикулярна плоскости треугольника и проходит через вершину (при высоте) | 
|
|
| Правильный треугольник со стороной a и массой m | Ось перпендикулярна плоскости треугольника и проходит через центр масс | 
|
|
| Квадрат со стороной a и массой m | Ось перпендикулярна плоскости квадрата и проходит через центр масс | 
|
|
| Прямоугольник со сторонами a и b и массой m | Ось перпендикулярна плоскости прямоугольника и проходит через центр масс | 
|
|
| Правильный n-угольник радиуса r и массой m | Ось перпендикулярна плоскости и проходит через центр масс | ![{displaystyle {frac {mr^{2}}{6}}left[1+2cos(pi /n)^{2}right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bf60937eb16b822e5b6212250fa8f13c794f3cb)
|
|

|
Тор (полый) с радиусом направляющей окружности R, радиусом образующей окружности r и массой m | Ось перпендикулярна плоскости направляющей окружности тора и проходит через центр масс | 
|
Вывод формул[править | править код]
Тонкостенный цилиндр (кольцо, обруч)
Вывод формулы
Момент инерции тела равен сумме моментов инерции составляющих его частей. Разобьём тонкостенный цилиндр на элементы с массой dm и моментами инерции dJi. Тогда

Поскольку все элементы тонкостенного цилиндра находятся на одинаковом расстоянии от оси вращения, формула (1) преобразуется к виду

Толстостенный цилиндр (кольцо, обруч)
Вывод формулы
Пусть имеется однородное кольцо с внешним радиусом R, внутренним радиусом R1, толщиной h и плотностью ρ. Разобьём его на тонкие кольца толщиной dr. Масса и момент инерции тонкого кольца радиуса r составит

Момент инерции толстого кольца найдём как интеграл


Поскольку объём и масса кольца равны

получаем окончательную формулу для момента инерции кольца

Однородный диск (сплошной цилиндр)
Вывод формулы
Рассматривая цилиндр (диск) как кольцо с нулевым внутренним радиусом (R1 = 0), получим формулу для момента инерции цилиндра (диска):

Сплошной конус
Вывод формулы
Разобьём конус на тонкие диски толщиной dh, перпендикулярные оси конуса. Радиус такого диска равен

где R – радиус основания конуса, H – высота конуса, h – расстояние от вершины конуса до диска.
Масса и момент инерции такого диска составят


Интегрируя, получим

Сплошной однородный шар
Вывод формулы
Разобьём шар на тонкие диски толщиной dh, перпендикулярные оси вращения. Радиус такого диска, расположенного на высоте h от центра сферы, найдём по формуле

Масса и момент инерции такого диска составят

Момент инерции шара найдём интегрированием:

Тонкостенная сфера
Вывод формулы
Для вывода воспользуемся формулой момента инерции однородного шара радиуса R:

Вычислим, насколько изменится момент инерции шара, если при неизменной плотности ρ его радиус увеличится на бесконечно малую величину dR.

Тонкий стержень (ось проходит через центр)
Вывод формулы
Разобьём стержень на малые фрагменты длиной dr. Масса и момент инерции такого фрагмента равна

Интегрируя, получим

Тонкий стержень (ось проходит через конец)
Вывод формулы
При перемещении оси вращения из середины стержня на его конец, центр тяжести стержня перемещается относительно оси на расстояние l⁄2. По теореме Штейнера новый момент инерции будет равен

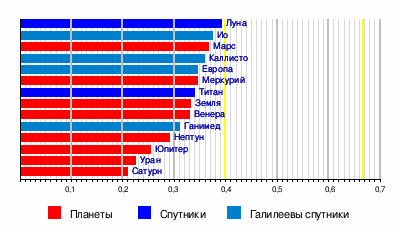
Безразмерные моменты инерции планет и их спутников[2][3][4]
Безразмерные моменты инерции планет и спутников[править | править код]
Большое значение для исследований внутренней структуры планет и их спутников имеют их безразмерные моменты инерции. Безразмерный момент инерции тела радиуса r и массы m равен отношению его момента инерции относительно оси вращения к моменту инерции материальной точки той же массы относительно неподвижной оси вращения, расположенной на расстоянии r (равному mr2). Эта величина отражает распределение массы по глубине. Одним из методов её измерения у планет и спутников является определение доплеровского смещения радиосигнала, передаваемого АМС, пролетающей около данной планеты или спутника. Для тонкостенной сферы безразмерный момент инерции равен 2/3 (~0,67), для однородного шара — 0,4, и вообще тем меньше, чем большая масса тела сосредоточена у его центра. Например, у Луны безразмерный момент инерции близок к 0,4 (равен 0,391), поэтому предполагают, что она относительно однородна, её плотность с глубиной меняется мало. Безразмерный момент инерции Земли меньше, чем у однородного шара (равен 0,335), что является аргументом в пользу существования у неё плотного ядра[5][6].
Центробежный момент инерции[править | править код]
Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины[1][7]:



где x, y и z — координаты малого элемента тела объёмом dV, плотностью ρ и массой dm.
Ось OX называется главной осью инерции тела, если центробежные моменты инерции Jxy и Jxz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции данного тела[7].
Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела, а моменты инерции относительно этих осей — его главными центральными моментами инерции. Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции[7].
Геометрические моменты инерции[править | править код]
Геометрический момент инерции объёма относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где, как и ранее r — расстояние от элемента dV до оси a.
Размерность JVa — длина в пятой степени (
Геометрический момент инерции площади относительно оси — геометрическая характеристика тела, выражаемая формулой[8]:

где интегрирование выполняется по поверхности S, а dS — элемент этой поверхности.
Размерность JSa — длина в четвёртой степени (
Через геометрический момент инерции площади выражается момент сопротивления сечения:

Здесь rmax — максимальное расстояние от поверхности до оси.
| Геометрические моменты инерции площади некоторых фигур | |
|---|---|
Прямоугольника высотой  и шириной и шириной  : :
|

|
Прямоугольного коробчатого сечения высотой и шириной по внешним контурам  и и  , а по внутренним и соответственно , а по внутренним и соответственно
|

|
Круга диаметром 
|

|


Момент инерции относительно плоскости[править | править код]
Моментом инерции твёрдого тела относительно некоторой плоскости называют скалярную величину, равную сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до рассматриваемой плоскости[9].
Если через произвольную точку 







В случае сплошного тела суммирование заменяется интегрированием.
Центральный момент инерции[править | править код]
Центральный момент инерции (момент инерции относительно точки O, момент инерции относительно полюса, полярный момент инерции) 
где:
Центральный момент инерции можно выразить через главные осевые моменты инерции, а также через моменты инерции относительно плоскостей[9]:


Тензор инерции и эллипсоид инерции[править | править код]
Момент инерции тела относительно произвольной оси, проходящей через центр масс и имеющей направление, заданное единичным вектором 
(1)
где 




Выбором соответствующей системы координат матрица тензора инерции может быть приведена к диагональному виду. Для этого нужно решить задачу о собственных значениях для матрицы тензора


где 


откуда получается уравнение эллипсоида в собственных координатах. Разделив обе части уравнения на 

и произведя замены:

получаем канонический вид уравнения эллипсоида в координатах 

Расстояние от центра эллипсоида до некоторой его точки связано со значением момента инерции тела вдоль прямой, проходящей через центр эллипсоида и эту точку:

См. также[править | править код]
- Кинематика твёрдого тела
- Метод главных компонент
- Сопротивление материалов
- Теорема Штейнера
- Теорема Кёнига (механика)
- Механические приложения тройного интеграла
- Механические приложения двойного интеграла
- Полярный момент инерции
- Список моментов инерции
- Момент силы
- Момент импульса
Комментарии[править | править код]
- ↑ При получении этой формулы путём вычитания момента инерции сплошного цилиндра радиусом r1 из цилиндра радиусом r2 необходимо обратить внимание, что их массы при этом не будут одинаковыми или равны m. При этом должно выполняться условие
. Из формулы для массы соответствующего цилиндра можно определить, что в этом случае
и
. В правильности использования знака «+» в этой формуле также можно убедиться, если сравнить моменты инерции полого толстостенного и сплошного цилиндров с одинаковыми массами. Действительно, у первого из этих цилиндров масса в среднем сосредоточена дальше от оси, чем у второго, поэтому и момент инерции этого цилиндра должен быть больше, чем у сплошного. Именно такое соотношение моментов инерции и обеспечивает знак «+». С другой стороны, в пределе при стремлении r1 к r2 формула для полого толстостенного цилиндра должна приобрести тот же вид, что и формула для полого тонкостенного цилиндра. Очевидно, что такой переход происходит только при использовании формулы со знаком «+».
Примечания[править | править код]
- ↑ 1 2 3 Тарг С. М. Момент инерции // Физическая энциклопедия / Гл. ред. А. М. Прохоров. — М.: Большая Российская энциклопедия, 1992. — Т. 3. — С. 206—207. — 672 с. — 48 000 экз. — ISBN 5-85270-019-3.
- ↑ Planetary Fact Sheet. Дата обращения: 31 августа 2010. Архивировано 14 марта 2016 года.
- ↑ Showman, Adam P.; Malhotra, Renu. The Galilean Satellites (англ.) // Science. — 1999. — Vol. 286, no. 5437. — P. 77—84. — doi:10.1126/science.286.5437.77. — PMID 10506564.
- ↑ Margot, Jean-Luc; et al. Mercury’s moment of inertia from spin and gravity data (англ.) // Journal of Geophysical Research (англ.) (рус. : journal. — 2012. — Vol. 117. — doi:10.1029/2012JE004161.
- ↑ Галкин И.Н. Внеземная сейсмология. — М.: Наука, 1988. — С. 42-73. — 195 с. — (Планета Земля и Вселенная). — 15 000 экз. — ISBN 502005951X.
- ↑ Пантелеев В. Л. Физика Земли и планет. Гл. 3.4 — Гравитационное поле планеты. Дата обращения: 31 августа 2010. Архивировано 3 октября 2013 года.
- ↑ 1 2 3 Тарг С. М. Краткий курс теоретической механики. — М.: «Высшая школа», 1995. — С. 269—271. — 416 с. — ISBN 5-06-003117-9.
- ↑ 1 2 Бухгольц Н. Н. Основной курс теоретической механики. — 4-е изд. — М.: «Наука», 1966. — Т. 2. — С. 131.
- ↑ 1 2 3 Яблонский А. А. Динамика // Курс теоретической механики. — 3-е изд. — М.: «Высшая школа», 1966. — Т. II. — С. 102—103. — 411 с.
Литература[править | править код]
- Матвеев. А. Н. Механика и теория относительности. М.: Высшая школа, 1986. (3-е изд. М.: ОНИКС 21 век: Мир и Образование, 2003. — 432с.)
- Трофимова Т. И. Курс физики. — 7-е изд. — М.: Высшая школа, 2001. — 542 с.
- Алешкевич В. А., Деденко Л. Г., Караваев В. А. Механика твердого тела. Лекции. Архивная копия от 7 января 2014 на Wayback Machine Издательство Физического факультета МГУ, 1997.
- Павленко Ю. Г. Лекции по теоретической механике. М.: ФИЗМАТЛИТ, 2002. — 392с.
- Яворский Б. М., Детлаф А. А. Физика для школьников старших классов и поступающих в вузы: учебное пособие — М.: Дрофа, 2002, 800с. ISBN 5-7107-5956-3
- Сивухин Д. В. Общий курс физики. В 5 т. Том I. Механика. 4-е изд. М.: ФИЗМАТЛИТ; Изд-во МФТИ, 2005. — 560 с.
- Беляев Н. М. Сопротивление материалов. Главная редакция физико-математической литературы изд-ва «Наука», 1976. — 608 с.
Ссылки[править | править код]
- Определение момента инерции тел простой формы.
Главный вектор инерции колеса
Глава 17. Принцип Даламбера.
17.2. Главный вектор и главный момент сил инерции.
17.2.1. Тело массой 20 кг движется поступательно с ускорением 20 м/с 2 Определить модуль главного вектора сил инерции. (Ответ 400)
17.2.2. Кривошип ОА длиной 0,1 м шарнирного параллелограмма ОАВО1 начинает вращаться из состояния покоя с постоянным угловым ускорением ϵ = 2 рад/с 2 . Определить модуль равнодействующей сил инерции стержня АВ массой 2 кг в момент времени t = 1с. (Ответ 0,894)
17.2.3. Водило 1 длиной l = 0,8 м планетарного механизма вращается с постоянным угловым ускорением ϵ = 10 рад/с 2 . Колесо 2 массой 2 кг при этом движется поступательно. Центр масс колеса 2 совпадает с точкой О1. Определить главный момент сил инерции колеса 2 относительно центра О. (Ответ 12,8)
17.2.4. Определить главный момент сил инерции колеса относительно центра масс О, если колесо вращается вокруг него по закону φ = 2t 2 , а масса колеса, равная 2 кг, равномерно распределена по ободу радиуса r = 20 см. (Ответ -0,32)
17.2.5. Однородный цилиндр массой 40 кг вращается вокруг оси Oz с угловой скоростью ω = 50t. Определить главный момент сил инерции цилиндра относительно оси Oz, если радиус цилиндра R = 0,15 м. (Ответ 22,5)
17.2.6. Блок шестерен, масса которого 0,3 кг и радиус инерции ρ = 0,1 м, вращается относительно оси Oz но закону φ = 25t 2 . Определить главный момент сил инерции блока относительно оси Oz. (Ответ -0,15)
17.2.7. Тонкий однородный стержень АВ массой m = 1 кг вращается с постоянной угловой скоростью ω = 5 рад/с вокруг оси, перпендикулярной стержню. Определить модуль главного вектора сил инерции стержня, если размеры l1 = 0,2 м, l2 = 0,4 м. (Ответ 2,5)
17.2.8. Однородный тонкий стержень длиной l = 1,5 м вращается с угловым ускорением ϵ вокруг оси, перпендикулярной стержню. Найти размер l1, определяющий положение центра А приведения сил инерции, относительно которого главный момент сил инерции равен нулю. (Ответ 1)
17.2.9. Определить главный момент сил инерции однородного диска радиуса r = 0,2 м массой m = 2 кг относительно оси вращения О, смещенной на расстояние е = 0,1 м от центра масс С. Диск вращается равноускоренно с угловым ускорением ϵ = 10 рад/с 2 . (Ответ 0,6)
17.2.10. Однородная прямоугольная пластина массой 1 кг вращается с угловым ускорением ϵ = 30 рад/с 2 вокруг оси, перпендикулярной плоскости пластины. Определить главный момент сил инерции относительно оси вращения, если размер l = 0,1 м. (Ответ -0,5)
17.2.11. Тонкий однородный стержень массой m = 5 кг вращается с постоянной угловой скоростью ω = 100 рад/с. Определить проекцию вектора главного момента сил инерции на ось Ох, если угол α = 45°, размер l = 0,25 м. (Ответ -521)
17.2.12. Однородная тонкая прямоугольная пластина массой 3 кг вращается вокруг оси Oz по закону φ = 3t 2 . Определить главный момент сил инерции пластины относительно оси Oz, если размер l = 0,5 м. (Ответ 1,5)
17.2.13. Два одинаковых однородных стержня вращаются вокруг оси Оу, имея в данный момент времени угловую скорость ω = 10 рад/с и угловое ускорение ϵ = 100 рад/с 2 . Определить модуль главного вектора сил инерции стержней, если масса каждого стержня 2 кг, а длина l = 0,4 м. (Ответ 80)
17.2.14. Тонкая пластина вращается с постоянной угловой скоростью ω = 200 рад/с. Ее центр тяжести находится на оси вращения, а центробежный момент инерции относительно осей в плоскости пластины равен Ixz = -2,5 · 10 -3 кг·м 2 . Определить главный момент сил инерции относительно оси Оу. (Ответ -100)
17.2.15. Труба вращается вокруг центральной оси Oz с угловым ускорением ϵ = 180 рад/с 2 . Центробежные моменты инерции трубы равны IХZ = 1,6 · 10 -3 кг·м 2 , Iуz = 0. Определить главный момент сил инерции относительно оси Ох. (Ответ 0,288)
17.2.16. Однородный цилиндр радиуса r = 0,2 м катится но плоскости. Определить главный момент сил инерции относительно точки А, если масса цилиндра m = 5 кг, а ускорение его центра масс а = 4 м/с 2 . (Ответ 6)
17.2.17. Однородный цилиндр массой m = 10 кг катится по плоскости согласно закону xC = 0,1 sin 0,25 πt. Определить модуль главного вектора сил инерции цилиндра в момент времени t = 1 с. (Ответ 0,436)
17.2.18. Однородный диск радиуса r1 = 12 см массой 10 кг катится по окружности радиуса r2 = 20 см. Центр О диска перемещается согласно уравнению s = 50t 2 , где s – в см. Определить модуль главного вектора сил инерции диска в момент времени t = 1 с. (Ответ 32,8)
17.2.19. Однородный цилиндр радиуса r1 = 0,24 м массой 20 кг катится по окружности радиуса r2. Ускорение центра О цилиндра а = 60 м/с 2 . Определить главный момент сил инерции цилиндра, принимая за центр приведения точку А. (Ответ -216)
17.2.20. Кривошип 1 вращается с постоянной угловой скоростью ω = 4 рад/с и приводит в движение однородное колесо 2 массой m = 4 кг, которое катится по внутренней поверхности колеса 3. Определить модуль главного вектора сил инерции колеса 2, если радиусы R = 40 см, r = 15 см. (Ответ 16)
17.2.21. Однородный стержень, длина которого АВ = 50 см и масса m = 10 кг, движется в плоскости Оху согласно уравнениям хА = 4t 2 , уа = 0, φ = 6t 2 . Определить главный момент сил инерции стержня относительно его центра масс. (Ответ -2,5)
Принцип Даламбера

5.4. ПРИНЦИП ДАЛАМБЕРА
Встречающиеся в тематических структурах АПИМ названия тем заданий: главный вектор сил инерции; главный момент сил инерции (через угловые характеристики); метод кинетостатики (определение реакций опор).
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Принцип Даламбера для механической системы (в записи для сил)
При движении механической системы сумма главных векторов активных сил, реакций связей и сил инерции всегда равна нулю:  .
.
Здесь и далее из рассмотрения исключаются внутренние силы.
Принцип Даламбера для механической системы (в записи для моментов)
При движении механической системы сумма главных моментов активных сил, реакций связей и сил инерции относительно любой точки пространства всегда равна нулю:  .
.
В проекциях на декартовы оси:

Главный вектор сил инерции
Главный вектор сил инерции равен  .
.
Главный момент сил инерции вращающегося тела относительно оси вращения
Главный момент сил инерции вращающегося тела относительно оси вращения равен  .
.
В случае вращения тела вокруг неподвижной оси за центр приведения можно взять точку О, являющуюся пересечением оси вращения z с плоскостью материальной симметрии тела, или точку С (центр масс тела). В зависимости от выбранного центра приведения главный вектор сил инерции приложен либо в точке О, либо в точке С, главный вектор сил инерции вычисляется по-разному (см. конспект в тетради)
ПРИМЕРЫ ТЕСТОВЫХ ЗАДАНИЙ
 Сплошной однородный диск массой
Сплошной однородный диск массой 
 и радиусом
и радиусом 
 катится без скольжения по горизонтальной поверхности.
катится без скольжения по горизонтальной поверхности.
Скорость центра масс диска изменяется по закону 
 , где
, где  – время в секундах. Модуль главного вектора сил инерции равен
– время в секундах. Модуль главного вектора сил инерции равен 
 .
.
Однородная квадратная пластина со стороной  и массой
и массой  вращается вокруг оси, перпендикулярной плоскости пластины и проходящей через середину одной из ее сторон, с постоянной угловой скоростью
вращается вокруг оси, перпендикулярной плоскости пластины и проходящей через середину одной из ее сторон, с постоянной угловой скоростью  .
.
Модуль главного вектора сил инерции этой системы  равен .
равен .
Однородный диск радиусом  и массой вращается вокруг неподвижной оси, проходящей через точку
и массой вращается вокруг неподвижной оси, проходящей через точку  перпендику
перпендику лярно плоскости диска, с угловой скоростью и угловым ускорением
лярно плоскости диска, с угловой скоростью и угловым ускорением  . Модуль главного вектора сил инерции диска равен .
. Модуль главного вектора сил инерции диска равен .
 Задание 5.4.4
Задание 5.4.4
Однородное кольцо массой  и радиусом
и радиусом  , закрепленное на невесомых спицах, вращается вокруг оси, проходящей через центр кольца перпендикулярно плоскости кольца.
, закрепленное на невесомых спицах, вращается вокруг оси, проходящей через центр кольца перпендикулярно плоскости кольца.
Угловая скорость вращения изменяется по закону
 , где – время в секундах.
, где – время в секундах.
Модуль главного момента сил инерции кольца равен  .
.
 Поворотный кран закреплен внизу на подпятнике
Поворотный кран закреплен внизу на подпятнике  , а сверху – в цилиндрическом шарнире
, а сверху – в цилиндрическом шарнире  . Масса крана
. Масса крана  , масса поднимаемого груза
, масса поднимаемого груза  . Груз поднимается с ускорением
. Груз поднимается с ускорением 
 на нерастяжимом и невесомом канате. При расчете ускорение земного притяжения считать
на нерастяжимом и невесомом канате. При расчете ускорение земного притяжения считать  . Вертикальная составляющая реакции в опоре равна
. Вертикальная составляющая реакции в опоре равна  .
.
 Задание 5.4.6
Задание 5.4.6
Однородный стержень  массой вращается вокруг неподвижной горизонтальной оси
массой вращается вокруг неподвижной горизонтальной оси  , перпендикулярной стержню, с постоянной угловой скоростью . Размеры заданы на чертеже, массой вала можно пренебречь.
, перпендикулярной стержню, с постоянной угловой скоростью . Размеры заданы на чертеже, массой вала можно пренебречь.
Реакция подшипника  в точке равна .
в точке равна .
Главный вектор и главный момент сил инерции
Находить значения главного вектора и главного момента сил инерции непосредственно по формулам (22.6) затруднительно, так как в общем случае будем иметь дело с множеством сил инерции всех материальных точек системы. Поэтому целесообразно получить выражения главного вектора и главного момента сил инерции через параметры, характеризующие в целом механическую систему и ее движение.
Подставив в первое из равенств (22.7) значение ZT 7 / из теоремы о движении центра масс Мас = ЕГ/ (см. § 17.3), найдем
т. е. главный вектор сил инерции механической системы направлен противоположно вектору ас, а модуль его равен произведению массы системы на ускорение ее центра масс.
Подставив теперь во второе из равенств (22.7) значение ‘Lni0(Fk e ) из теоремы моментов (см. § 18.2) dK0/dt = Y.m0(F?), найдем
т. е. главный момент сил инерции механической системы относительно некоего центра О направлен противоположно вектору производной по времени от кинетического момента системы относительно того же центра.
Аналогичным будет соотношение для моментов относительно оси. Так, относительно оси z будет
Таким образом, все силы инерции механической системы можно эквивалентно заменить двумя векторами: силой Я ф , приложенной в произвольно выбранном центре О, и парой сил с моментом, равным М ф .
Рассмотрим, как эти величины определяются для твердого тела.
Если тело совершает поступательное движение, то ускорения всех его точек одинаковы и равны ускорению ас центра масс С
тела (ак =ас). Следовательно, все силы инерции –ткак образуют систему параллельных сил, которая приводится к равнодействующей Я ф = -Мас, линия действия которой будет проходить через точку С (здесь полная аналогия с силами тяжести). Сумма моментов сил инерции относительно точки С будет равна нулю.
Для твердого тела, вращающегося вокруг неподвижной оси Oz, величину главного момента сил инерции относительно этой оси определим, подставив в формулу (22.11) значение Kz = Jzсо (см. § 18.1):
т. е. модуль M°Z = Jzs, а направление момента противоположно
направлению углового ускорения е (это следует учитывать при выполнении чертежей для расчета).
Следовательно, система сил инерции такого вращающегося тела приводится к приложенной в точке О силе Я ф , определяемой формулой (22.8), и к паре, момент которой определяется формулой (22.12).
В частном случае, когда тело вращается вокруг оси Cz, проходящей через его центр масс С, получим R ф = 0, так как ас = 0, и система сил инерции приводится лишь к одной паре с моментом
ф , определяемой формулой (22.8) и приложенной в центре масс С тела, и паре сил с моментом = — /Сге (ось Cz перпендикулярна плоскости движения).
[spoiler title=”источники:”]
http://pandia.ru/text/78/582/22397.php
http://studref.com/496104/matematika_himiya_fizik/glavnyy_vektor_glavnyy_moment_inertsii
[/spoiler]
Шестаков И.Г. (гр.
513)
Определение
моментов инерции махового колеса
Принадлежности: установка; набор
грузов; линейка; штангенциркуль;
секундомер; весы.
В данной
работе момент инерции колеса определяется
двумя методами.
1. Метод
вращения.
На шкив А
(или В) наматывается нить с прикрепленным
к ней грузом Р (рис. 1). Падая груз
разматывает нить и приводит систему
(маховое колесо К, шкивы А и В, ось С) во
вращательное движение. При этом
потенциальная энергия груза переходит
в кинетическую энергию груза и кинетическую
энергию вращательного движения системы.
|
Рис.1 |
На
Введем |

Тогда уравнение
(I) может быть переписано
в виде:
![]()
![]() .(2)
.(2)
Так как момент
сил трения не зависит от скорости
вращения, то движение системы будет
равноускоренным.
Зная высоту h и время
движения груза t, легко
подсчитать его скорость в нижнем
положение:
![]() .(3)
.(3)
Если нить разматывается
без скольжения, то линейная скорость
точек на поверхности шкива равна скорости
груза и
![]() .(4)
.(4)
Работа против сил
трения пропорциональна числу оборотов,
совершаемых системой, т.е.
![]() ,(5)
,(5)
где
![]()
– работа против сил трения за один оборот.
![]() .(6)
.(6)
![]()
находится следующим образом.
В момент достижения
грузом нижнего положения нить отделяется
от шкива, а система продолжает вращаться,
совершая работу против сил трения за
счет приобретенной кинетической энергии
![]() .
.
![]() .(7)
.(7)
![]() –
–
число оборотов системы до поной остановки.
Используя соотношения
(3), (4), (5), (6) и (7), можно представить (2) в
следующем виде:
![]() ,
,
откуда
![]() .
.
Все величины, входящие
в правую часть этого равенства могут
быть измерены на опыте.
2. Метод
колебаний.
Если на некотором
расcтоянии l
от центра колеса прикрепить к нему
дополнительный груз Q
(рис. 2), то система превращается в
физический маятник.
|
Рис.2 |
Выведенный из
где Для малых углов
или |

![]() .(8)
.(8)
Уравнение (8) представляет
собой уравнение гармонических колебаний
с периодом
 .
.
Следовательно,
![]() .
.
Практическая
часть.
1. Определение
момента инерции системы методом вращения
.
![]()
– число оборотов за время раскручивания
нити.
![]() –
–
число оборотов системы без нити.
![]() ;
;
h=M-l,
где M=181 см. – длина нити,
a l –
расстояние, на которое груз отступает
от шкива.
Эксперимент проводился
для 2-х различных грузов и на 2-х разных
шкивах различного радиуса.
А) m=249г;
d=7.47 см; r=3.75см ; h = 163см.
|
№ |
1 |
2 |
3 |
4 |
5 |
|
|
72 |
71 |
71 |
73 |
73 |
|
t, c |
9.7 |
9.6 |
9.5 |
9.6 |
9.6 |
Момент инерции
вычислялся по формуле
![]() ;
;
Во всех вычисления
подразумевается
![]()
Погрешность
вычислялась по формуле :

![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]()
![]()
![]() ;
;
![]() г*м
г*м![]() ;
;
![]()
г*м![]() ;
;
б) m=249г;
d=4.34см; r=2.17см;
|
№ |
1 |
2 |
3 |
4 |
5 |
|
|
63 |
65 |
64 |
63 |
65 |
|
t,с |
15.6 |
15.8 |
16.0 |
15.8 |
15.4 |
![]() ;
;
![]() с;
с;
![]() ;
;
![]() с;
с;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
![]() ;
;
![]() ;
;
![]() г*м
г*м![]() ;
;
![]() г*м
г*м![]() ;
;
в) m=148,0г;
r=2.17см;
|
№ |
1 |
2 |
3 |
4 |
5 |
|
|
30 |
30 |
28 |
29 |
28 |
|
t,c |
20.8 |
20.6 |
20.8 |
20.2 |
20.6 |
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() г*м
г*м![]() ;
;
![]()
г*м![]() ;
;
г) m=148
г; r=3.74 см;
|
№ |
1 |
2 |
3 |
4 |
5 |
|
|
38 |
39 |
38 |
38 |
37 |
|
t,c |
12.1 |
12.2 |
12.3 |
12.2 |
12.2 |
![]() c;
c;
![]() с;
с;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() г*м
г*м![]() ;
;
![]()
г*м![]() ;
;
В результате
обработки данных были получены следующие
значения:
|
№ |
m, |
r, |
I |
|
1 |
249 |
3.735 |
|
|
2 |
249 |
2.17 |
|
|
3 |
148 |
2.17 |
|
|
4 |
148 |
3.375 |
|
Полученные
значения нельзя считать равноточными.
Усредняем по формулам :
 ;
;
 ;
;
Подставляя
наши данные получим:
![]()
г*м![]() ;
;
2.Определение
момента инерции системы методом
колебаний.
a)
![]()
г; n=10;
|
№ |
1 |
2 |
3 |
4 |
5 |
|
t,c |
21.4 |
21.8 |
21.6 |
21.0 |
21.8 |
![]()
![]() c;
c;
![]() с;
с;
![]() ;
;
![]() ;
;
![]() c;
c;
![]() ;
;
![]()
г*м![]() ;
;
![]()
г*м![]() ;
;
б)
![]()
г; n=5;
|
№ |
1 |
2 |
3 |
4 |
5 |
|
t,c |
16.2 |
16.0 |
16.0 |
16.2 |
16.0 |
![]() c;
c;
![]() с;
с;
![]() ;
;
![]() ;
;
![]() c;
c;
![]() ;
;
![]()
г*м![]() ;
;
![]()
г*м![]() ;
;
в)
![]()
г; n=10;
|
№ |
1 |
2 |
3 |
4 |
5 |
|
t,c |
15.8 |
16.0 |
15.8 |
15.6 |
15.8 |
![]() c;
c;
![]() с;
с;
![]() ;
;
![]() ;
;
![]() c;
c;
![]() ;
;
![]()
г*м![]() ;
;
![]()
г*м![]() ;
;
В ходе эксперимента
и последующих вычислений мы получили
:
|
№ |
m, |
I, |
|
1 |
742 |
|
|
2 |
298 |
|
|
3 |
1475 |
|
Эти данные
также необходимо усреднять по формулам
для неравноточных измерений,значит:
![]()
г*м![]() ;
;
3.Расчет
моментов инерции шкивов и оси, через их
размеры и плотность.
М.шкив : d=
4.34см; h= 3.2см;
![]() 0.4г/см
0.4г/см![]()
Б.шкив: d=
7.47см; h= 3.6см;
![]() 8.9г/см
8.9г/см![]()
Ось: d=
1.60см; h= 25.0см;
![]() 8.9г/см
8.9г/см![]()
Мах колеса:
d=27.0 см; h=1.0
см;
![]() 7.8г/см
7.8г/см![]()
![]()
г*м![]() ;
;
![]()
г*м![]() ;
;
![]()
г*м![]() ;
;
![]()
г*м![]() ;
;
Как видим моменты
инерции для оси и шкивов очень малы по
сравнению с моментом инерции махового
колеса. Максимальное из них составляет
всего 0.05% от I махового
колеса. Следовательно, при вычислении
момента инерции махового колеса ,
вычитать из I системы
момент инерции шкивов и оси
нецелесообразно(для метода вращения).
4.Оценим вклад
момента инерции дополнительного груза
в I системы для метода
колебаний.
![]() ;
;
![]()
г*м![]()
– для груза массой m=1475 гр.
Следовательно, этот
момент инерции нужно учитывать. Остальные
грузы будут вносить менее значительный
вклад,т.к. их масса не очень велика.
5.Вычисление
момента инерции махового колеса с
использованием обоих методов.
![]()
г*м![]()
– метод вращения.
![]()
г*м![]() –
–
метод колебаний
Усредняем
значения по формулам для неравноточных
измерений.
![]()
г*м![]() ;
;
Вывод: В ходе работы
мы определили момент инерции махового
колеса двумя методами – вращения и
колебаний. В результате чего, мы получили
следующее значение момента инерции
махового колеса:
![]()
г*м![]() ;
;
Полученное нами
значение лежит довольно близко к
теоретическому:
![]()
г*м![]() ;
;
Метод вращений дает
нам наилучший результат, это связано
с тем, что в методе колебаний существенное
влияние оказывает трение в осях и как
следствие – очень быстрое затухание
колебаний.
Соседние файлы в папке Лабы 2 сем
- #
- #
- #
- #
- #
- #
- #
- #
- #
