Моменты инерции
тел сложной формы часто удается вычислить,
если их предварительно разбить на тела
простой формы. Моменты инерции сложных
тел получают, суммируя моменты инерции
частей этих тел. Получим формулы для
вычисления моментов инерции некоторых
однородных простейших тел.
О z’ днородный стержень
И
Рис. 21
меем однородный стержень длиной
и массой
(рис. 21). Направим по стержню ось
.
Вычислим момент инерции стержня
относительно оси
,
проходящей перпендикулярно стержню
через его конец. Согласно определению
момента инерции сплошного юла относительно
оси, имеем
![]()
,
так
как
![]()
,
где
![]()
– -плотность стержня.
Вычисляя интеграл,
получаем
![]()
. (69)
Момент
инерции стержня относительно оси
,
проходящей через центр масс и параллельной
оси
,
определяется по теореме Штейнера
,
где
![]()
.
Следовательно,
![]()
. (70)
Прямоугольная пластина
Прямоугольная
тонкая пластина имеет размеры
и
![]()
и массу
(рис. 22). Оси
и
расположим в плоскости пластины, а ось
– перпендикулярно ей. Для определения
момента инерции пластины относительно
оси
разобьем пластину на элементарные
полоски шириной
![]()
и массой
![]()
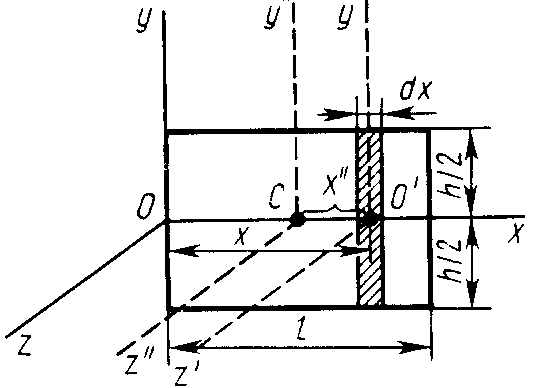
и проинтегрируем по
от 0 до
.
Получим

y”
y‘
,
т
Рис. 22
ак как
![]()
.
Аналогичные
вычисления для оси
дадут
![]()
,
так
как эта ось проходит через середину
пластины.
Для
определения момента инерции пластины
относительно оси
следует предварительно вычислить момент
инерции отдельной заштрихованной
полоски относительно параллельной оси
![]()
по формуле (70) для стержня и применить
затем теорему Штейнера. Для элементарной
полоски имеем
![]()
.
Интегрируя
это выражения по
от 0 до
,
получим

.
Для
моментов инерции пластины относительно
осей координат получено:
,
![]()
,
![]()
. (71)
Круглый диск
Имеем
тонкий однородный диск радиусом
![]()
и массой
(рис. 23). Вычислим момент его инерции
![]()
относительно т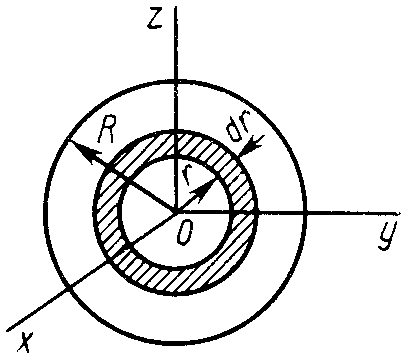
очки
.
Этот момент инерции для тонкого диска
совпадает с моментом инерции
![]()
относительно координатной оси
,
перпендикулярной плоскости диска.
Разобьем диск на концентрические полоски
шириной
![]()
,
принимаемые в пределе за материальные
окружности. Масса полоски равна ее
площади
![]()
,
умноженной на плотность
![]()
,
т.е.
![]()
.
Момент одной полоски относительно точки
равен
![]()
.
Для всего диска
![]()
Рис. 23
.
Таким образом
![]()
. (72)
Для
осей координат
и
,
расположенных в плоскости диска, в силу
симметрии
![]()
.
Используя (66), имеем
![]()
,
но
![]()
,
поэтому
![]()
. (73)
В случае топкого
проволочного кольца или круглого колеса,
у которых масса распределена не по
площади, а по его ободу, имеем
![]()
,
![]()
. (74)
Круглый цилиндр
Для
круглого однородного цилиндра, масса
которого
,
радиус
и длина
(рис. 24), вычислим его момент и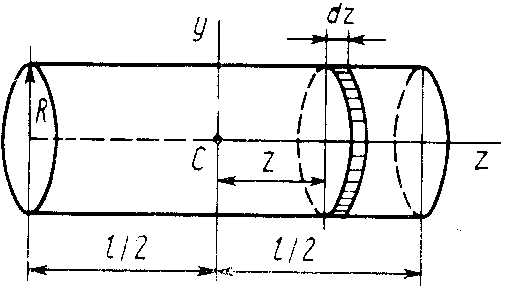
нерции
относительно продольной оси симметрии
:
разобьем цилиндр плоскостями,
перпендикулярными оси
на тонкие диски массой
и толщиной
![]()
.
Для такого диска момент инерции
о
Рис. 24
тносительно оси
равен
![]()
.
Для всего цилиндра
![]()
. (75)
Вычислим
момент инерции цилиндра относительно
его поперечной оси симметрии
![]()
.
Для этого разобьем цилиндр поперечными
сечениями, перпендикулярными его
продольной оси, на элементарные диски
толщиной
.
Момент инерции элементарного диска
массой
![]()
относительно оси
по теореме Штейнера
![]()
.
Чтобы
получить момент инерции всего цилиндра
относительно оси
следует проинтегрировать полученное
выражение по
![]()
в пределах от 0 до
![]()
и результат удвоить. Получим
![]()
Но
![]()
– масса цилиндра. Следовательно
![]()
.
Таким
образом, момент инерции цилиндра
относительно его поперечной оси симметрии
получается как сумма моментов инерции
относительно этой оси диска и стержня,
массы которых равны по отдельности
массе цилиндра. Диск получается из
цилиндра симметричным сжатием его с
торцов до срединной плоскости при
сохранении радиуса, а стержень – сжатием
цилиндра в однородный стержень,
расположенный по оси цилиндра, при
сохранении длины.
Шар
П
Рис. 25
усть масса шара
,
радиус
(рис. 25). Разобьем шар на концентрические
сферические слои радиусом
и толщиной
.
Масса такого слоя
![]()
,
где
![]()
,
– объем слоя, равный произведению
площади поверхности сферы радиусом
на толщину слоя
,
т.е.
![]()
.
Таким образом, масса элементарного слоя
![]()
.
Для
момента инерции шара относительно его
центра
имеем
![]()
. (76)
Для
осей координат, проходящих через центр
шара, в силу симметрии
![]()
.
Используя (66), имеем
![]()
.
Поэтому
![]()
. (77)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Механические приложения двойного интеграла
Будем считать, что $mathbf { textit { D } } $ – неоднородная плоская пластина с поверхностной плотностью материала в точке $P$ равной $mu (P)$. В механике $mu (P)$ определяется так. Точка $P$ окружается малой областью $mathbf { textit { S } } $, находится масса $mathbf { textit { m } } (mathbf { textit { S } } )$ и площадь этой области { площадь тоже будем обозначать буквой $mathbf { textit { S } } $ } и $mu (P)=mathop { lim } limits_ { diam(S)to 0 } frac { m(S) } { S } $. 
Для нахождения массы по заданной плотности мы решим обратную задачу. Разобьём $mathbf { textit { D } } $ на малые подобласти $mathbf { textit { D } } _ { 1 } $, $mathbf { textit { D } } _ { 2 } $,$mathbf { textit { D } } _ { 3 } , { ldots } , mathbf { textit { D } } _ { n } $, в каждой из подобластей $mathbf { textit { D } } _ { i } $ выберем произвольную точку $mathbf { textit { P } } _ { i } $, и, считая что в пределах $mathbf { textit { D } } _ { i } $ плотность постоянна и равна $mu (P_i )$, получим, что масса $mathbf { textit { D } } _ { i } $ приближённо есть $mu (P_i )cdot s(D_i )$, а масса всей пластины $sumlimits_ { i=1 } ^n { mu (P_i )cdot s(D_i ) } $.
Это интегральная сумма, при уменьшении $d=mathop { max } limits_ { i=1,2,ldots ,n } diam(D_i )$ точность приближения увеличивается, и в пределе $m(D)=mathop { lim } limits_ { begin{array} { l } dto 0 \ (nto infty ) \ end{array} } sumlimits_ { i=1 } ^n { mu (P_i )cdot Delta s(D_i ) } =iintlimits_D { mu (P)ds } $.
Аналогично находятся другие параметры пластины:
Координаты центра тяжести
$x_c =frac { 1 } { m(D) } iintlimits_D { xcdot mu (P)ds } $, $y_c =frac { 1 } { m(D) } iintlimits_D { ycdot mu (P)ds } $;
Моменты инерции пластины
- $I_x =iintlimits_D { y^2cdot mu (P)ds } $ { относительно оси $mathbf { textit { Ox } } $ } ,
- $I_y =iintlimits_D { x^2cdot mu (P)ds } $ { относительно оси $mathbf { textit { Oy } } $ } ,
- $I_O =iintlimits_D { (x^2+y^2)cdot mu (P)ds } =I_x +I_y $ { относительно начала координат } .
Пластина расположена в области (R) и ее плотность в точке ( { left( { x,y }right) } ) равна ( { rho left( { x,y }right) } ).
Масса пластины
(m = largeiintlimits_Rnormalsize { rho left( { x,y }right)dA } )
Статические моменты пластины
Момент пластины относительно оси (Ox) определяется формулой
( { M_x } = largeiintlimits_Rnormalsize { yrho left( { x,y }right)dA } )
Аналогично, момент пластины относительно оси (Oy) выражается в виде
( { M_y } = largeiintlimits_Rnormalsize { xrho left( { x,y }right)dA } )
Координаты центра масс пластины
- (bar x = largefrac { { { M_y } } } { m } normalsize = largefrac { 1 } { m } normalsize largeiintlimits_Rnormalsize { xrho left( { x,y }right)dA } = largefrac { { iintlimits_R { xrho left( { x,y }right)dA } } } { { iintlimits_R { rho left( { x,y }right)dA } } } normalsize,;)
- (bar y = largefrac { { { M_x } } } { m } normalsize = largefrac { 1 } { m } normalsize largeiintlimits_Rnormalsize { yrho left( { x,y }right)dA } = largefrac { { iintlimits_R { yrho left( { x,y }right)dA } } } { { iintlimits_R { rho left( { x,y }right)dA } } } normalsize ).
Заряд пластины
(Q = largeiintlimits_Rnormalsize { sigma left( { x,y }right)dA } ),
где электрический заряд распределен по области (R) и его плотность в точке ( { left( { x,y }right) } ) равна ( { sigma left( { x,y }right) } ).
Среднее значение функции
(mu = largefrac { 1 } { S } iintlimits_Rnormalsize { fleft( { x,y }right)dA } ,;) где (S = largeiintlimits_Rnormalsize { dA } ).
Пример 1
Найти параметры неоднородной плоской пластины, ограниченной кривыми
$D:left[{ begin{array} { l } y=x^2, \ y=4; \ end{array} }right.$ если плотность $mu (x,y)=y+1$.

Решение:
$m(D)=iintlimits_D { (y+1)dxdy } =2intlimits_0^2 { dx } intlimits_ { x^2 } ^4 { (y+1)dy } =2intlimits_0^2 { left. { left( { y^2/2+y }right) }right|_ { x^2 } ^4 dx } =$ $ =2intlimits_0^2 { left( { 12-x^4/2-x^2 }right)dx } =2left. { left( { 12x-x^5/10-x^3/3 }right) }right|_0^2 =2left( { 24-frac { 16 } { 5 } -frac { 8 } { 3 } }right)=frac { 544 } { 15 } . $ $ x_c =frac { 1 } { m(D) } iintlimits_D { x(y+1)dx } dy=frac { 15 } { 544 } intlimits_ { -2 } ^2 { dx } intlimits_ { x^2 } ^4 { x(y+1)dy } =frac { 15 } { 544 } intlimits_ { -2 } ^2 { xleft. { left( { y^2/2+y }right) }right|_ { x^2 } ^4 dx } = $ $=frac { 15 } { 544 } intlimits_ { -2 } ^2 { left( { 12x-x^5/2-x^3 }right)dx } = quad =frac { 1 } { 544 } left. { left( { 6x^2-x^6/10-x^4/4 }right) }right|_ { -2 } ^2 =0$ { что и следовало ожидать, так как область и плотность симметричны относительно оси Оу). $ begin{array} { l } y_c =frac { 1 } { m(D) } iintlimits_D { y(y+1)dx } dy=frac { 15 } { 544 } intlimits_ { -2 } ^2 { dx } intlimits_ { x^2 } ^4 { y(y+1)dy } =frac { 15 } { 272 } intlimits_0^2 { left. { left( { y^3/3+y^2/2 }right) }right|_ { x^2 } ^4 dx } = \ =frac { 15 } { 272 } intlimits_0^2 { left( { 64/3+8-x^6/3-x^4/2 }right)dx } =frac { 15 } { 272 } left. { left( { 88x/3-x^7/21-x^5/10 }right) }right|_0^2 =frac { 15 } { 272 } left( { frac { 176 } { 3 } -frac { 128 } { 21 } -frac { 16 } { 5 } }right)=frac { 15 } { 272 } cdot frac { 1728 } { 35 } approx 2,72. \ end{array} $ $ I_x =iintlimits_D { y^2(y+1)dx } dy=2intlimits_0^2 { dx } intlimits_ { x^2 } ^4 { y^2(y+1)dy } =2intlimits_0^2 { left. { left( { y^4/4+y^3/3 }right) }right|_ { x^2 } ^4 dx } =2intlimits_0^2 { left( { frac { 256 } { 3 } -frac { x^8 } { 4 } -frac { x^6 } { 3 } }right)dx } = $ $ =2left. { left( { frac { 256 } { 3 } x-frac { x^9 } { 36 } -frac { x^7 } { 21 } }right) }right|_0^2 approx 300,7. $ $ I_y =iintlimits_D { x^2(y+1)dx } dy=2intlimits_0^2 { x^2dx } intlimits_ { x^2 } ^4 { (y+1)dy } =2intlimits_0^2 { x^2left. { left( { y^2/2+y }right) }right|_ { x^2 } ^4 dx } =2intlimits_0^2 { x^2left( { 12-frac { x^4 } { 2 } -x^2 }right)dx } = $ $ =2left. { left( { 4x^3-frac { x^7 } { 14 } -frac { x^5 } { 5 } }right) }right|_0^2 approx 32,9. quad I_O =iintlimits_D { left( { x^2+y^2 }right)(y+1)dx } dy=I_x +I_y approx 333,6. $
Пример 2
Вычислить моменты инерции треугольника, ограниченного прямыми (x + y = 1,) (x = 0,) (y = 0) и имеющего плотность $rho left( { x,y }right) = xy.$

Решение:
Найдем момент инерции пластины относительно оси (Ox:) $ { { I_x } = iintlimits_R { { y^2 } rho left( { x,y }right)dxdy } } = { intlimits_0^1 { left[ { intlimits_0^ { 1 – x } { { y^2 } xydy } }right]dx } } = { intlimits_0^1 { left[ { intlimits_0^ { 1 – x } { { y^3 } dy } }right]xdx } } = { intlimits_0^1 { left[ { left. { left( { frac { { { y^4 } } } { 4 } }right) }right|_0^ { 1 – x } }right]xdx } } = \ = { frac { 1 } { 4 } intlimits_0^1 { { { left( { 1 – x }right) } ^4 } xdx } } = { frac { 1 } { 4 } intlimits_0^1 { left( { 1 – 4x + 6 { x^2 } – 4 { x^3 } + { x^4 } }right)xdx } } = \ = { frac { 1 } { 4 } intlimits_0^1 { left( { x – 4 { x^2 } + 6 { x^3 } – 4 { x^4 } + { x^5 } }right)dx } } = { frac { 1 } { 4 } left. { left( { frac { { { x^2 } } } { 2 } – frac { { 4 { x^3 } } } { 3 } + frac { { 6 { x^4 } } } { 4 } – frac { { 4 { x^5 } } } { 5 } + frac { { { x^6 } } } { 6 } }right) }right|_0^1 } = { frac { 1 } { 4 } left( { frac { 1 } { 2 } – frac { 4 } { 3 } + frac { 3 } { 2 } – frac { 4 } { 5 } + frac { 1 } { 6 } }right) } = { frac { { 49 } } { { 120 } } . } $
Аналогично вычислим момент инерции относительно оси (Oy:) $ { { I_y } = iintlimits_R { { x^2 } rho left( { x,y }right)dxdy } } = { intlimits_0^1 { left[ { intlimits_0^ { 1 – x } { { x^2 } xydy } }right]dx } } = { intlimits_0^1 { left[ { intlimits_0^ { 1 – x } { ydy } }right] { x^3 } dx } } = { intlimits_0^1 { left[ { left. { left( { frac { { { y^2 } } } { 2 } }right) }right|_0^ { 1 – x } }right] { x^3 } dx } } = { frac { 1 } { 2 } intlimits_0^1 { { { left( { 1 – x }right) } ^2 } { x^3 } dx } } = \ = { frac { 1 } { 2 } intlimits_0^1 { left( { 1 – 2x + { x^2 } }right) { x^3 } dx } } = { frac { 1 } { 2 } intlimits_0^1 { left( { { x^3 } – 2 { x^4 } + { x^5 } }right)dx } } = { frac { 1 } { 2 } left. { left( { frac { { { x^4 } } } { 4 } – frac { { 2 { x^5 } } } { 5 } + frac { { { x^6 } } } { 6 } }right) }right|_0^1 } = { frac { 1 } { 2 } left( { frac { 1 } { 4 } – frac { 2 } { 5 } + frac { 1 } { 6 } }right) } = { frac { 1 } { { 120 } } . } $
Пример 3
Электрический заряд распределен по площади диска ( { x^2 } + { y^2 } = 1) таким образом, что его поверхностная плотность равна $sigma left( { x,y }right) = 1 + { x^2 } + { y^2 } ;left( { text { Кл/м } ^2 }right)$ Вычислить полный заряд диска.
Решение:
В полярных координатах область, занятая диском, описывается множеством (left[{ left( { r,theta }right)|;0 le r le 1,0 le theta le 2pi }right].)
Полный заряд будет равен $ { Q = iintlimits_R { sigma left( { x,y }right)dxdy } } = { intlimits_0^ { 2pi } { left[ { intlimits_0^1 { left( { 1 + { r^2 } { { cos } ^2 } theta + { r^2 } { sin^2 } theta }right)rdr } }right]dtheta } } = { intlimits_0^ { 2pi } { dtheta } intlimits_0^1 { left( { 1 + { r^2 } }right)rdr } } = { 2pi intlimits_0^1 { left( { r + { r^3 } }right)dr } } = \ = { 2pi left. { left( { frac { { { r^2 } } } { 2 } + frac { { { r^4 } } } { 4 } }right) }right|_0^1 } = { 2pi left( { frac { 1 } { 2 } + frac { 1 } { 4 } }right) } = { frac { { 3pi } } { 2 } ;left( { text { Кл } }right). } $
Содержание:
Геометрия масс:
Центр масс
При рассмотрении движения твердых тел и других механических систем важное значение имеет точка, называемая центром масс. Если механическая система состоит из конечного числа материальных точек 

где  — масса системы. Обозначая декартовы координаты материальных точек
— масса системы. Обозначая декартовы координаты материальных точек  , из (1) проецированием на декартовы оси координат получим следующие формулы для координат центра масс:
, из (1) проецированием на декартовы оси координат получим следующие формулы для координат центра масс:

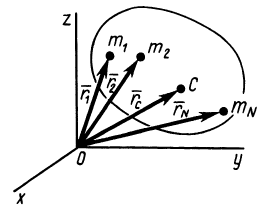
Рис. 21
Центр масс является не материальной точкой, а геометрической. Он может не совпадать ни с одной материальной точкой системы, как, например, в случае кольца. Центр масс системы характеризует распределение масс в системе.
Векторная величина  называется статическим моментом массы относительно точки
называется статическим моментом массы относительно точки  . Скалярная величина
. Скалярная величина  называется статическим моментом
называется статическим моментом
массы относительно координатной плоскости  . Величины
. Величины  и
и  являются соответственно статическими моментами массы относительно координатных плоскостей
являются соответственно статическими моментами массы относительно координатных плоскостей  и
и  .
.
Радиус-вектор и координаты центра масс через статические моменты массы выражаются формулами

Если механическая система представляет собой сплошное тело, то его разбивают на элементарные частицы с бесконечно малыми массами  и с изменяющимися от частицы к частице радиусом-вектором
и с изменяющимися от частицы к частице радиусом-вектором  .
.
Суммы в пределе переходят в интегралы. Формулы (1) и (Г) принимают форму

где  — масса тела.
— масса тела.
Для однородных сплошных тел  , где
, где  — плотность тела, общая для всех элементарных частиц;
— плотность тела, общая для всех элементарных частиц;  —объем элементарной частицы;
—объем элементарной частицы;  —объем тела.
—объем тела.
Для тел типа тонкого листа, которые можно принять за однородные материальные поверхности,  , где
, где  — поверхностная плотность;
— поверхностная плотность;  —площадь поверхности элементарной частицы;
—площадь поверхности элементарной частицы;  —площадь поверхности.
—площадь поверхности.
Для тонкой проволоки, которую можно принять за отрезок линии,  , где
, где  — линейная плотность;
— линейная плотность;  —длина элемента линии;
—длина элемента линии;  —длина отрезка линии.
—длина отрезка линии.
В этих случаях определение центра масс тел сводится к вычислению центра масс объемов, площадей и длин линий соответственно.
Моменты инерции
Для характеристики распределения масс в телах при рассмотрении вращательных движений требуется ввести понятия моментов инерции.
Моменты инерции относительно точки и оси
Моментом инерции механической системы, состоящей из  материальных точек, относительно точки
материальных точек, относительно точки  называется сумма произведений масс этих точек на квадраты их расстояний до точки
называется сумма произведений масс этих точек на квадраты их расстояний до точки  (рис. 22), т. е.
(рис. 22), т. е.

Момент инерции относительно точки часто называют полярным моментом инерции. В случае сплошного тела сумма переходит в интеграл и для полярного момента инерции имеем

где  — масса элементарной частицы тела, принимаемой в пределе за точку;
— масса элементарной частицы тела, принимаемой в пределе за точку;  —ее расстояние до точки .
—ее расстояние до точки .
Моментом инерции  системы материальных точек относительно оси
системы материальных точек относительно оси  называется сумма произведений масс этих точек на квадраты их расстояний
называется сумма произведений масс этих точек на квадраты их расстояний  до оси
до оси  (рис. 22), т. е.
(рис. 22), т. е.

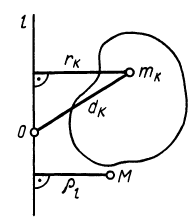
Рис. 22
В частном случае сплошного тела сумму следует заменить интегралом:

Моменты инерции одинаковых по форме однородных тел, изготовленных из разных материалов, отличаются друг от друга. Характеристикой, не зависящей от массы материала, является радиус инерции. Радиус инерции  относительно оси
относительно оси  определяется по формуле
определяется по формуле

где  —масса тела.
—масса тела.
Момент инерции относительно оси через радиус инерции относительно этой оси определяется выражением

В справочниках по моментам инерции приводят таблицы значений радиусов инерции различных тел.
Формула (5′) позволяет считать радиус инерции тела относительно оси расстоянием от этой оси до такой точки, в которой следует поместить массу тела, чтобы ее момент инерции оказался равным моменту инерции тела относительно рассматриваемой оси.
Моменты инерции относительно оси и точки имеют одинаковую размерность — произведение массы на квадрат длины  .
.
Кроме моментов инерции относительно точки и оси используются также моменты инерции относительно плоскостей и центробежные моменты инерции. Эти моменты инерции удобно рассмотреть относительно координатных плоскостей и осей декартовой системы координат.
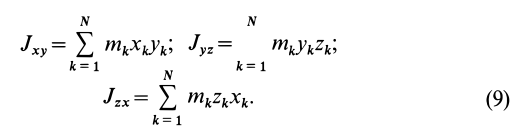
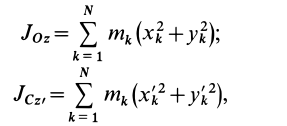
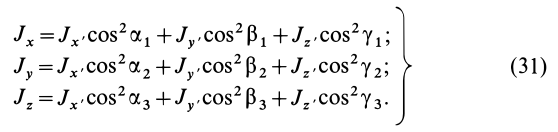
Моменты инерции относительно осей координат
Моменты инерции относительно декартовых осей координат  ,
,  и
и  и их начала — точки
и их начала — точки  (рис. 23) — определяются выражениями
(рис. 23) — определяются выражениями

где  — координаты материальных точек системы. Для сплошных тел эти формулы примут вид
— координаты материальных точек системы. Для сплошных тел эти формулы примут вид

Из приведенных формул следует зависимость

Если через точку провести другую систему декартовых осей координат  , то для них по формуле (8) получим
, то для них по формуле (8) получим

Из сравнения (8) и (8′) следует, что

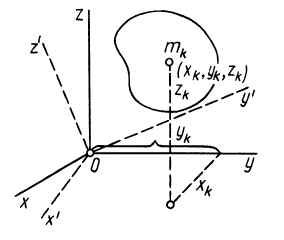
Рис. 23
Сумма моментов инерции относительно декартовых осей координат не зависит от ориентации этих осей в рассматриваемой точке, т. е. является величиной, инвариантной по отношению к направлению осей координат.
Для осей координат  можно определить следующие три центробежных момента инерции:
можно определить следующие три центробежных момента инерции:
Центробежные моменты инерции часто называют произведениями инерции.
Моменты инерции относительно осей и точек — величины положительные, так как в них входят квадраты координат. Центробежные моменты инерции содержат произведения координат и могут быть как положительными, так и отрицательными.
Центробежные моменты инерции имеют важное значение при рассмотрении давлений на подшипники при вращении твердого тела вокруг неподвижной оси и в других случаях.
Кроме рассмотренных моментов инерции иногда используются моменты инерции относительно координатных плоскостей  , которые определяются выражениями
, которые определяются выражениями

Теорема о моментах инерции относительно параллельных осей (теорема Штейнера)
Установим зависимость между моментами инерции системы относительно параллельных осей, одна из которых проходит через центр масс. Пусть имеем две системы прямоугольных, взаимно параллельных осей координат  и
и  . Начало системы координат
. Начало системы координат  находится в” центре масс системы (рис. 24).
находится в” центре масс системы (рис. 24).
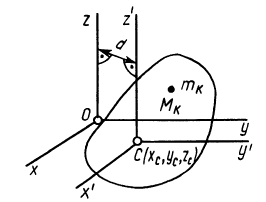
Рис. 24
По определению момента инерции относительно оси имеем
где  — масса точки
— масса точки  , а
, а  и
и  — координаты этой точки относительно систем координат и соответственно. Если обозначить
— координаты этой точки относительно систем координат и соответственно. Если обозначить  координаты центра масс относительно системы координат , то для взаимно параллельных осей координаты одной и той же точки связаны соотношениями параллельного переноса
координаты центра масс относительно системы координат , то для взаимно параллельных осей координаты одной и той же точки связаны соотношениями параллельного переноса

Подставим эти значения координат в выражение момента инерции  . После преобразований получим
. После преобразований получим

В этом соотношении  —масса системы,
—масса системы,  , так как
, так как  и
и  вследствие k = 1
вследствие k = 1
того, что по условию центр масс находится в начале координат этой системы координат.
Величина  , где
, где  —расстояние между осями
—расстояние между осями  и
и  . Окончательно
. Окончательно

Связь моментов инерции относительно двух параллельных осей, одна из которых проходит через центр масс, составляет содержание так называемой теоремы Штейнера или Гюйгенса— Штейнера: момент инерции системы относительно какой-либо оси равен моменту инерции относительно параллельной оси, проходящей через центр масс, плюс произведение массы системы на квадрат расстояния между этими осями.
Из теоремы Штейнера следует, что для совокупности параллельных осей момент инерции является наименьшим относительно оси, проходящей через центр масс.
Если взять ось  параллельной
параллельной  , то для нее получим
, то для нее получим
где  — расстояние между параллельными осями
— расстояние между параллельными осями  и
и  .
.
Исключая момент инерции  из двух последних формул, получим зависимость моментов инерции относительно двух параллельных осей, не проходящих через центр масс:
из двух последних формул, получим зависимость моментов инерции относительно двух параллельных осей, не проходящих через центр масс:

Установим изменение центробежных моментов инерции при параллельном переносе осей координат. Имеем

Учитывая, что  получаем
получаем

где  — координаты центра масс относительно системы координат
— координаты центра масс относительно системы координат  . Аналогичные формулы получаются для двух других центробежных моментов инерции:
. Аналогичные формулы получаются для двух других центробежных моментов инерции:

Так как начало системы координат находится в центре масс, то  ,
,  ,
,  и тогда
и тогда

т. е. центробежные моменты инерции при параллельном переносе осей координат из любой точки в центре масс изменяются в соответствии с (10).
Если производится параллельный перенос осей  из точки
из точки  в центр масс, то, согласно (10), имеем:
в центр масс, то, согласно (10), имеем:

Исключая из (10) и (10′) центробежные моменты инерции Л’з” Лу, получим формулы для изменения центробежных моментов инерции при параллельном переносе осей координат из точки  в точку
в точку  :
:

где  и
и  — координаты центра масс в двух системах взаимно параллельных осей координат.
— координаты центра масс в двух системах взаимно параллельных осей координат.
Моменты инерции простейших однородных тел
Моменты инерции тел сложной формы часто удается вычислить, если их предварительно разбить на тела простой формы. Моменты инерции сложных тел получают суммируя моменты инерции частей этих тел. Получим формулы для вычисления моментов инерции некоторых однородных простейших тел.
Однородный стержень
Имеем однородный стержень длиной  и массой
и массой  (рис. 25). Направим по стержню ось
(рис. 25). Направим по стержню ось  . Вычислим момент инерции стержня относительно оси
. Вычислим момент инерции стержня относительно оси  , проходящей перпендикулярно стержню через его конец. Согласно определению момента инерции сплошного тела относительно оси, имеем
, проходящей перпендикулярно стержню через его конец. Согласно определению момента инерции сплошного тела относительно оси, имеем
так как  , где
, где  —плотность стержня.
—плотность стержня.
Вычисляя интеграл, получаем
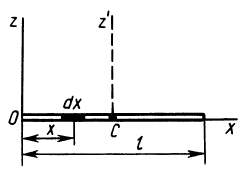
Рис. 25
Таким образом,

Момент инерции стержня относительно оси  , проходящей через центр масс и параллельной оси
, проходящей через центр масс и параллельной оси  , определяется по теореме Штейнера:
, определяется по теореме Штейнера:

Следовательно,

т. е.

Прямоугольная пластина
Прямоугольная тонкая пластина имеет размеры  и
и  и массу
и массу  (рис. 26). Оси
(рис. 26). Оси  и
и  расположим в плоскости пластины, а ось
расположим в плоскости пластины, а ось  —перпендикулярно ей. Для определения момента инерции пластины относительно оси
—перпендикулярно ей. Для определения момента инерции пластины относительно оси  разобьем пластину на элементарные полоски шириной
разобьем пластину на элементарные полоски шириной  и массой
и массой  и проинтегрируем по
и проинтегрируем по  от 0 до
от 0 до  . Получим
. Получим
так как  .
.
Аналогичные вычисления для оси  дадут
дадут
так как эта ось проходит через середину пластины. Для определения момента инерции пластины относительно оси  следует предварительно вычислить момент инерции отдельной заштрихованной полоски относительно параллельной оси
следует предварительно вычислить момент инерции отдельной заштрихованной полоски относительно параллельной оси  по формуле (12) для стержня и применить затем теорему Штейнера. Для элементарной полоски имеем
по формуле (12) для стержня и применить затем теорему Штейнера. Для элементарной полоски имеем
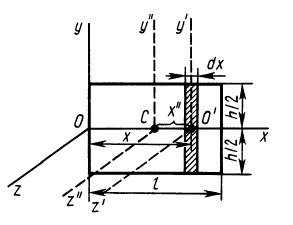
Рис. 26
Интегрируя это выражение в пределах от 0 до  , получим
, получим

Итак, для моментов инерции пластины относительно осей координат получены следующие формулы:

Круглый диск
Имеем тонкий однородный диск радиусом  и массой
и массой  (пис. 27). Вычислим момент его инерции
(пис. 27). Вычислим момент его инерции  относительно точки . Этот момент инерции для тонкого диска совпадает с моментом инерции
относительно точки . Этот момент инерции для тонкого диска совпадает с моментом инерции  относительно координатной оси
относительно координатной оси  , перпендикулярной плоскости диска. Разобьем диск на концентрические полоски шириной
, перпендикулярной плоскости диска. Разобьем диск на концентрические полоски шириной  , принимаемые в пределе за материальные окружности. Масса полоски равна ее площади
, принимаемые в пределе за материальные окружности. Масса полоски равна ее площади  , умноженной на плотность
, умноженной на плотность  , т.е.
, т.е.  . Момент одной полоски относительно точки равен
. Момент одной полоски относительно точки равен  . Для всего диска
. Для всего диска
Таким образом,

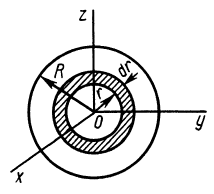
Рис. 27
Для осей координат  и
и  , расположенных в плоскости диска, в силу симметрии
, расположенных в плоскости диска, в силу симметрии  . Используя (8), имеем
. Используя (8), имеем  , но
, но  , поэтому
, поэтому

В случае тонкого проволочного кольца или круглого колеса, у которых масса распределена не по площади, а по его ободу, имеем

Круглый цилиндр
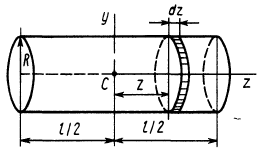
Рис. 28
Для круглого однородного цилиндра, масса которого  , радиус
, радиус  и длина
и длина  (рис. 28), вычислим прежде всего его момент инерции относительно продольной оси симметрии
(рис. 28), вычислим прежде всего его момент инерции относительно продольной оси симметрии  . Для этого разобьем цилиндр плоскостями, перпендикулярными оси , на тонкие диски массой
. Для этого разобьем цилиндр плоскостями, перпендикулярными оси , на тонкие диски массой  и толщиной
и толщиной  . Для такого диска момент инерции относительного оси
. Для такого диска момент инерции относительного оси  равен
равен  . Для всего цилиндра
. Для всего цилиндра
т.е.

Вычислим момент инерции цилиндра относительно его поперечной оси симметрии  . Для этого разобьем цилиндр поперечными сечениями, перпендикулярными его продольной оси, на элементарные диски толщиной
. Для этого разобьем цилиндр поперечными сечениями, перпендикулярными его продольной оси, на элементарные диски толщиной  . Момент инерции элементарного диска массой
. Момент инерции элементарного диска массой  относительно оси , по теореме Штейнера,
относительно оси , по теореме Штейнера,  .
.
Чтобы получить момент инерции всего цилиндра относительно оси , следует проинтегрировать полученное выражение по  в пределах от 0 до
в пределах от 0 до  и результат удвоить. Получим
и результат удвоить. Получим

Но  — масса цилиндра. Следовательно,
— масса цилиндра. Следовательно,

Таким образом, момент инерции цилиндра относительно его поперечной оси симметрии получается как сумма моментов инерции относительно этой оси диска и стержня, массы которых равны по отдельности массе цилиндра. Диск получается из цилиндра симметричным сжатием его с торцов до срединной плоскости при сохранении радиуса, а стержень — сжатием цилиндра в однородный стержень, расположенный по оси цилиндра, при сохранении длины.
Шар
Пусть масса шара  , радиус
, радиус  (рис. 29). Разобьем шар на концентрические сферические слои радиусом
(рис. 29). Разобьем шар на концентрические сферические слои радиусом  и толщиной
и толщиной  . Масса такого слоя
. Масса такого слоя  , где
, где  ;
;  —объем слоя, равный произведению площади поверхности сферы радиусом на толщину слоя , т.е.
—объем слоя, равный произведению площади поверхности сферы радиусом на толщину слоя , т.е.  . Таким образом, масса элементарного слоя
. Таким образом, масса элементарного слоя  . Для момента инерции шара относительно его центра
. Для момента инерции шара относительно его центра  имеем
имеем
т.е.

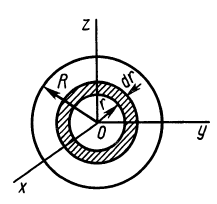
Рис. 29
Для осей координат, проходящих через центр шара, в силу симметрии  . Но
. Но  . Следовательно,
. Следовательно,

Моменты инерции относительно осей, проходящих через заданную точку
В заданной точке выберем декартову систему осей координат  . Ось
. Ось  образует с осями координат углы
образует с осями координат углы  (рис. 30). По определению момента инерции относительно оси имеем
(рис. 30). По определению момента инерции относительно оси имеем

или для сплошных тел
В дальнейшем используется определение (20). Сплошные тела считаются разбитыми на  малых частей, принимаемых за точки.
малых частей, принимаемых за точки.
Из прямоугольного треугольника  получаем
получаем

где  — координаты точки
— координаты точки  . Отрезок
. Отрезок  является проекцией радиуса-вектора
является проекцией радиуса-вектора  на ось
на ось  . Для получения проекции вектора
. Для получения проекции вектора  на ось
на ось  его следует умножить скалярно на единичный вектор этой оси
его следует умножить скалярно на единичный вектор этой оси  . Имеем
. Имеем

Умножая в (21)  , выраженный через координаты точки
, выраженный через координаты точки  , на единицу в виде
, на единицу в виде  и используя значение (22) для
и используя значение (22) для  , получим
, получим

Подставляя (23) в (20) и вынося косинусы углов за знаки сумм, имеем
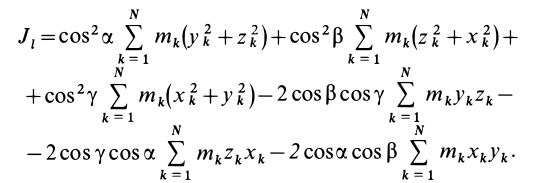
Учитывая, что

— моменты инерции относительно осей координат, а

— центробежные моменты инерции относительно тех же осей, получим

Для определения момента инерции  , кроме углов
, кроме углов  , определяющих направление оси, необходимо знать в точке
, определяющих направление оси, необходимо знать в точке  шесть моментов инерции:
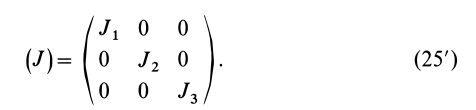
шесть моментов инерции:  . Их удобно расположить как элементы единой таблицы или матрицы:
. Их удобно расположить как элементы единой таблицы или матрицы:

Матрица, или таблица (25), составленная из осевых и центробежных моментов инерции относительно декартовых осей координат, называется тензором инерции в точке . В тензоре инерции условились центробежные моменты инерции брать со знаком минус. Компоненты тензора инерции (отдельные осевые или центробежные моменты инерции) зависят не только от выбора точки, но и от ориентации осей координат в этой точке.
Для определения момента инерции относительно какой-либо оси, проходящей через заданную точку, для рассматриваемого тела необходимо иметь тензор инерции в этой точке и углы, определяющие направление оси с осями координат.
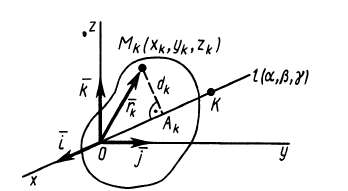
Рис. 30
Эллипсоид инерции
Для характеристики распределения моментов инерции тела относительно различных осей, проходящих через заданную точку, используется поверхность второго порядка — эллипсоид инерции. Для построения этой поверхности на каждой оси (см. рис. 31), проходящей через точку , откладывают от этой точки отрезок

Геометрическое место концов отрезков  расположится на поверхности, которая называется эллипсоидом инерции. Получим уравнение эллипсоида инерции. Для этого выразим косинусы углов
расположится на поверхности, которая называется эллипсоидом инерции. Получим уравнение эллипсоида инерции. Для этого выразим косинусы углов  через координаты
через координаты  точки
точки  . Имеем:
. Имеем:

Подставляя эти значения косинусов углов в (24) и сокращая на  , получим уравнение поверхности второго порядка:
, получим уравнение поверхности второго порядка:

Это действительно уравнение эллипсоида, так как отрезок  имеет конечную длину для всех осей, для которых моменты инерции не обращаются в нуль. Другие поверхности второго порядка, например гиперболоиды и параболоиды, имеют бесконечно удаленные точки. Эллипсоид инерции вырождается в цилиндр для тела в виде прямолинейного отрезка, если точка расположена на самом отрезке. Для оси, направленной по этой прямой линии, момент инерции обращается в нуль и соответственно отрезок равен бесконечности.
имеет конечную длину для всех осей, для которых моменты инерции не обращаются в нуль. Другие поверхности второго порядка, например гиперболоиды и параболоиды, имеют бесконечно удаленные точки. Эллипсоид инерции вырождается в цилиндр для тела в виде прямолинейного отрезка, если точка расположена на самом отрезке. Для оси, направленной по этой прямой линии, момент инерции обращается в нуль и соответственно отрезок равен бесконечности.
Для каждой точки имеется свой эллипсоид инерции. Эллипсоид инерции для центра масс тела называют центральным эллипсоидом инерции. Оси эллипсоида инерции (его сопряженные диаметры) называются главными осями инерции. В общем случае эллипсоид инерции имеет три взаимно перпендикулярные главные оси инерции. Они являются его осями симметрии.
В случае эллипсоида вращения все прямые, расположенные в экваториальной плоскости эллипсоида, перпендикулярной оси вращения, будут главными осями инерции. Для шара любая прямая, проходящая через его центр, есть главная ось инерции.
Моменты инерции относительно главных осей инерции называются главными моментами инерции, а относительно главных центральных осей инерции — главными центральными моментами инерции.
Если уравнение эллипсоида инерции отнести к его главным осям  , то оно примет вид
, то оно примет вид

где  —текущие координаты точки, расположенной на эллипсоиде инерции, относительно главных осей инерции;
—текущие координаты точки, расположенной на эллипсоиде инерции, относительно главных осей инерции; 
 — главные моменты инерции. Уравнение эллипсоида инерции (27′) не содержит слагаемых с произведениями координат точек. Поэтому центробежные моменты инерции относительно главных осей инерции равны нулю, т. е.
— главные моменты инерции. Уравнение эллипсоида инерции (27′) не содержит слагаемых с произведениями координат точек. Поэтому центробежные моменты инерции относительно главных осей инерции равны нулю, т. е.

Справедливо и обратное утверждение: если центробежные моменты инерции относительно трех взаимно перпендикулярных осей равны нулю, то эти оси являются главными осями инерции. Обращение в нуль трех центробежных моментов инерции является необходимым и достаточным условием того, что соответствующие прямоугольные оси координат есть главные оси инерции.
Главные моменты инерции часто обозначают  , вместо . Для главных осей инерции формула (24) принимает форму
, вместо . Для главных осей инерции формула (24) принимает форму

- Заказать решение задач по теоретической механике
Свойства главных осей инерции
Теорема 1. Если одна из декартовых осей координат, например  (рис. 31), является главной осью инерции для точки
(рис. 31), является главной осью инерции для точки  , а две другие оси
, а две другие оси  и
и  — любые, то два центробежных момента инерции, содержащих индекс главной оси инерции , обращаются в нуль, т.е.
— любые, то два центробежных момента инерции, содержащих индекс главной оси инерции , обращаются в нуль, т.е.  и
и  .
.
Главная ось инерции  является осью симметрии эллипсоида инерции. Поэтому каждой точке эллипсоида, например
является осью симметрии эллипсоида инерции. Поэтому каждой точке эллипсоида, например  , соответствует симметричная относительно этой оси точка
, соответствует симметричная относительно этой оси точка  . Подставляя в уравнение эллипсоида инерции (27) последовательно координаты этих точек, получим
. Подставляя в уравнение эллипсоида инерции (27) последовательно координаты этих точек, получим

Вычитая из первого уравнения второе, имеем
Так как всегда можно выбрать точки, для которых  и
и  отличны от нуля, то
отличны от нуля, то  .
.
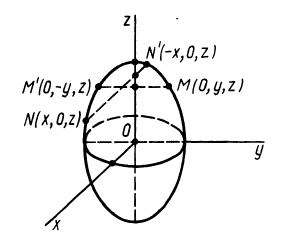
Рис. 31
Аналогичные рассуждения для двух симметричных относительно оси  точек
точек  и
и  приводят к заключению, что
приводят к заключению, что  . В аналитической геометрии при исследовании уравнений поверхностей второго порядка доказывается обратное утверждение, что если
. В аналитической геометрии при исследовании уравнений поверхностей второго порядка доказывается обратное утверждение, что если  и
и  , то ось есть главная ось. Таким образом, обращение в нуль центробежных моментов инерции
, то ось есть главная ось. Таким образом, обращение в нуль центробежных моментов инерции  и
и  является необходимым и достаточным условием, чтобы ось была главной осью инерции для точки .
является необходимым и достаточным условием, чтобы ось была главной осью инерции для точки .
Теорема 2. Если однородное тело имеет плоскость симметрии, то для любой точки, лежащей в этой плоскости, одна из главных осей инерции перпендикулярна плоскости симметрии, а две другие главные оси инерции расположены в этой плоскости.
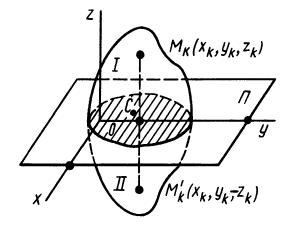
Рис. 32
Для доказательства теоремы выберем в плоскости симметрии  точку и в ней оси прямоугольной системы координат
точку и в ней оси прямоугольной системы координат  , причем ось направим перпендикулярно плоскости симметрии (рис. 32). Тогда каждой точке тела
, причем ось направим перпендикулярно плоскости симметрии (рис. 32). Тогда каждой точке тела  массой
массой  соответствует симметричная относительно плоскости точка
соответствует симметричная относительно плоскости точка  с такой же массой. Координаты точек
с такой же массой. Координаты точек  и
и  отличаются только знаком у координат
отличаются только знаком у координат  .
.
Для центробежного момента инерции  имеем
имеем

так как часть тела (I), соответствующая точкам с положительными координатами , одинакова с частью тела (II), у которой точки имеют такие же координаты , но со знаком минус. Аналогично доказывается, что
Так как центробежные моменты инерции и обращаются в нуль, то ось есть главная ось инерции для точки . Другие две главные оси инерции перпендикулярны оси и, следовательно, расположены в плоскости симметрии.
Центр масс однородного симметричного тела находится в плоскости симметрии. Поэтому одна из главных центральных осей инерции перпендикулярна плоскости симметрии, а две другие расположены в этой плоскости.
Доказанная теорема справедлива и для неоднородного тела, имеющего плоскость материальной симметрии.
Теорема 3. Если однородное тело имеет ось симметрии или неоднородное тело имеет ось материальной симметрии, то эта ось является главной центральной осью инерции.
Теорема доказывается аналогично предыдущей. Для каждой точки тела  с положительными координатами
с положительными координатами  и массой
и массой  существует симметричная относительно оси точка с такой же массой и такими же по величине, но отрицательными координатами
существует симметричная относительно оси точка с такой же массой и такими же по величине, но отрицательными координатами  , если осью симметрии является ось . Тогда
, если осью симметрии является ось . Тогда

так как суммы по симметричным относительно оси частям тела (I) и (II) отличаются друг от друга только знаком у координаты  .
.
Аналогично доказывается, что  .
.
Таким образом, ось является главной осью инерции для любой точки, расположенной на оси симметрии тела. Она есть главная центральная ось инерции, так как центр масс находится на оси симметрии.
Теорема 4. Главные оси инерции для точки , расположенной на главной центральной оси инерции, параллельны главным центральным осям инерции (рис. 33).
Выберем в точке главной центральной оси инерции  систему декартовых осей координат
систему декартовых осей координат  , взаимно параллельных главным центральным осям инерции
, взаимно параллельных главным центральным осям инерции  . Тогда координаты точки тела
. Тогда координаты точки тела  в двух системах осей координат будут связаны между собой формулами параллельного переноса осей
в двух системах осей координат будут связаны между собой формулами параллельного переноса осей

где  . Используя эти формулы, вычисляем центробежные моменты инерции
. Используя эти формулы, вычисляем центробежные моменты инерции  и
и  . Имеем
. Имеем

так как

где  —масса тела;
—масса тела;  — координата центра масс относительно системы координат . Аналогично получаем
— координата центра масс относительно системы координат . Аналогично получаем

Если  — центр масс системы, то
— центр масс системы, то  и
и  . Для главных центральных осей инерции центробежные моменты инерции равны нулю, т. е.
. Для главных центральных осей инерции центробежные моменты инерции равны нулю, т. е.

Используя полученные формулы при этих условиях, имеем:

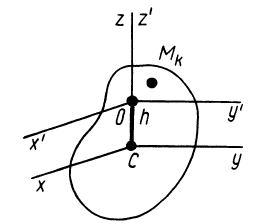
Рис. 33
Следовательно, оси  есть главные оси инерции для произвольной точки
есть главные оси инерции для произвольной точки  , расположенной на главной центральной оси инерции
, расположенной на главной центральной оси инерции  . Теорема доказана.
. Теорема доказана.
Из доказанной теоремы в качестве следствия получаем: главная центральная ось инерции является главной осью инерции для всех своих точек. Действительно, главная ось инерции  для точки
для точки  , лежащей на главной центральной оси инерции
, лежащей на главной центральной оси инерции  , совпадает с этой осью. Главная ось инерции таким свойством не обладает. Главные оси инерции для точки
, совпадает с этой осью. Главная ось инерции таким свойством не обладает. Главные оси инерции для точки  , расположенной на главной оси инерции точки
, расположенной на главной оси инерции точки  , не параллельны главным осям инерции для этой точки. Они в общем случае повернуты относительно этих осей.
, не параллельны главным осям инерции для этой точки. Они в общем случае повернуты относительно этих осей.
Определение главных моментов инерции и направления главных осей
Пусть известны компоненты тензора инерции в точке  относительно осей координат
относительно осей координат  . Для определения направления главных осей инерции в точке
. Для определения направления главных осей инерции в точке  используем уравнение эллипсоида инерции относительно этих осей
используем уравнение эллипсоида инерции относительно этих осей

Если оси координат  являются главными осями инерции, то радиус-вектор
являются главными осями инерции, то радиус-вектор  точки
точки  эллипсоида инерции, расположенной на главной оси инерции, например оси (рис. 34), направлен по нормали к эллипсоиду, т. е. параллельно вектору
эллипсоида инерции, расположенной на главной оси инерции, например оси (рис. 34), направлен по нормали к эллипсоиду, т. е. параллельно вектору  , который, согласно его определению, вычисляется по формуле
, который, согласно его определению, вычисляется по формуле
Параллельные векторы отличаются друг от друга скалярным множителем, который обозначим  . Тогда для параллельных векторов и и их проекций на оси координат имеем:
. Тогда для параллельных векторов и и их проекций на оси координат имеем:
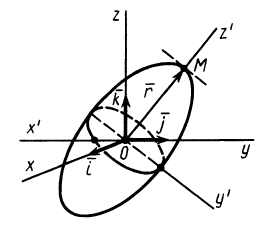
Рис. 34
В этих уравнениях  являются координатами точки конца вектора , проведенного из точки
являются координатами точки конца вектора , проведенного из точки  вдоль какой-либо главной оси инерции для этой точки.
вдоль какой-либо главной оси инерции для этой точки.
Для частных производных из (27′) получаем:
Подставляя их значения в (28′) и перенося все слагаемые в левую часть, после объединения и сокращения на общий множитель получим следующую систему уравнений для определения координат точки , находящейся на главной оси инерции:
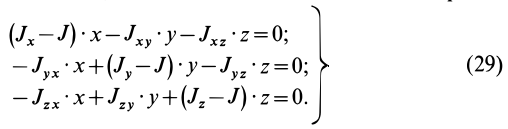
Так как (29) является однородной системой линейных уравнений, то отличные от нуля решения для координат получаются только при условии, что определитель этой системы равен нулю, т. е.

Это кубическое уравнение для определения  называется уравнением собственных значений тензора инерции.
называется уравнением собственных значений тензора инерции.
В общем случае имеется три различных действительных корня кубического уравнения  , которые являются главными моментами инерции. Действительно, если ось
, которые являются главными моментами инерции. Действительно, если ось  совпадает с главной осью инерции, то для точки
совпадает с главной осью инерции, то для точки  эллипсоида инерции, расположенной на этой оси,
эллипсоида инерции, расположенной на этой оси,  и
и  . Первое уравнение (29) принимает вид
. Первое уравнение (29) принимает вид
Так как  , то
, то  и
и  , которое следует обозначить
, которое следует обозначить  . Аналогично можно получить
. Аналогично можно получить  , если оси
, если оси  и
и  — главные оси инерции.
— главные оси инерции.
Подставляя в (29)  получим только два независимых уравнения для определения координат точки
получим только два независимых уравнения для определения координат точки  эллипсоида инерции, соответствующих главной оси инерции, для которой главный момент инерции есть . Третье уравнение системы будет следствием двух других уравнений, так как определитель этой системы равен нулю. Из (29) можно найти только две величины, например
эллипсоида инерции, соответствующих главной оси инерции, для которой главный момент инерции есть . Третье уравнение системы будет следствием двух других уравнений, так как определитель этой системы равен нулю. Из (29) можно найти только две величины, например  и
и  . Они определят направление вектора вдоль главной оси инерции, момент инерции относительно которой есть . Модуль радиуса-вектора
. Они определят направление вектора вдоль главной оси инерции, момент инерции относительно которой есть . Модуль радиуса-вектора  остается неопределенным. Аналогично определяются направления векторов
остается неопределенным. Аналогично определяются направления векторов  и
и  вдоль двух других главных осей инерции, для которых главные моменты инерции равны
вдоль двух других главных осей инерции, для которых главные моменты инерции равны  и . Можно доказать, что векторы ,
и . Можно доказать, что векторы ,  ,
,  , направленные вдоль главных осей инерции, взаимно перпендикулярны.
, направленные вдоль главных осей инерции, взаимно перпендикулярны.
Таким образом, если известен тензор инерции для осей  , то можно определить как направление главных осей инерции, так и главные моменты инерции. Для главных осей инерции тензор инерции (25) принимает форму
, то можно определить как направление главных осей инерции, так и главные моменты инерции. Для главных осей инерции тензор инерции (25) принимает форму
Выражение компонентов тензора инерции через главные моменты инерции
Определим компоненты тензора инерции в точке  относительно осей координат , если в этой точке известны главные моменты инерции относительно главных осей инерции
относительно осей координат , если в этой точке известны главные моменты инерции относительно главных осей инерции  , т. е.
, т. е.  . Предположим, что ориентация осей координат относительно главных осей инерции задана таблицей углов:
. Предположим, что ориентация осей координат относительно главных осей инерции задана таблицей углов:
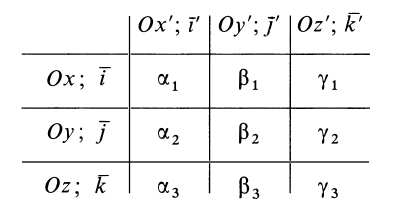
Осевые моменты инерции относительно осей  через главные моменты инерции определяются по формуле (24′). Принимая последовательно за ось
через главные моменты инерции определяются по формуле (24′). Принимая последовательно за ось  оси координат
оси координат  , получим
, получим
Для выражения центробежных моментов инерции через главные моменты инерции используем формулы преобразования координат точек тела при повороте осей координат вокруг точки  (рис. 35). Эти формулы получим проецированием на оси радиуса-вектора
(рис. 35). Эти формулы получим проецированием на оси радиуса-вектора  точки
точки  , разложенного предварительно на составляющие, параллельные осям двух систем осей координат в точке
, разложенного предварительно на составляющие, параллельные осям двух систем осей координат в точке  . Имеем
. Имеем

где 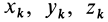 — координаты точки
— координаты точки  относительно системы осей координат
относительно системы осей координат  , а
, а  — относительно
— относительно  . Проецирование вектора на какую-либо ось прямоугольной системы координат эквивалентно скалярному умножению этого вектора на единичный вектор оси. Умножая обе части (32) последовательно на единичные векторы осей координат
. Проецирование вектора на какую-либо ось прямоугольной системы координат эквивалентно скалярному умножению этого вектора на единичный вектор оси. Умножая обе части (32) последовательно на единичные векторы осей координат  и учитывая таблицу углов для осей, получим
и учитывая таблицу углов для осей, получим
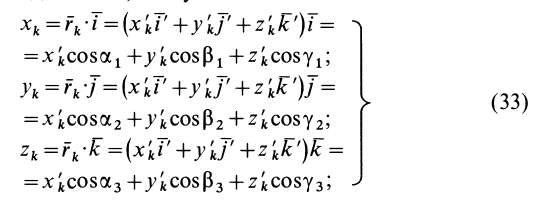
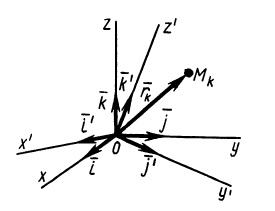
Рис. 35
Используя (33) для центробежного момента инерции  , имеем
, имеем
так как центробежные моменты инерции относительно главных осей инерции равны нулю, т. е.
Оси координат  и
и  взаимно перпендикулярны, поэтому косинусы их углов удовлетворяют условию
взаимно перпендикулярны, поэтому косинусы их углов удовлетворяют условию

или

Используя это соотношение для исключения величины  и добавляя в первом слагаемом (34) под знаком суммы
и добавляя в первом слагаемом (34) под знаком суммы  , а во втором
, а во втором  , после объединения слагаемых с одинаковыми произведениями косинусов получим
, после объединения слагаемых с одинаковыми произведениями косинусов получим
где 
— главные моменты инерции. Аналогично получаются выражения для  и
и  . Итак имеем
. Итак имеем

Формулы (31) и (35) дают выражения всех компонентов тензора инерции для осей координат  через главные моменты инерции, если известны углы этих осей с главными осями инерции. В приложениях встречаются частные случаи, когда одна из осей координат
через главные моменты инерции, если известны углы этих осей с главными осями инерции. В приложениях встречаются частные случаи, когда одна из осей координат  совпадает с главной осью инерции.
совпадает с главной осью инерции.
Если ось  совпадает с главной осью инерции
совпадает с главной осью инерции  (рис. 36), то
(рис. 36), то  . Это же можно получить из (35). Необходимые для вычисления углы соответственно равны:
. Это же можно получить из (35). Необходимые для вычисления углы соответственно равны:

Из (35) имеем

В формуле (35′) с полюсом следует брать главный момент инерции с индексом той оси, на положительное направление которой указывает дуговая стрелка поворота осей  на угол
на угол  до совпадения с осями
до совпадения с осями  . В рассматриваемом случае поворот осей
. В рассматриваемом случае поворот осей  вокруг
вокруг  до совпадения с главными осями производится от оси
до совпадения с главными осями производится от оси  к оси
к оси  ; следовательно, с плюсом следует взять главный момент инерции
; следовательно, с плюсом следует взять главный момент инерции  и с минусом —
и с минусом —  .
.
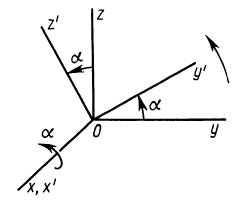
Рис. 36
Если оси расположены, как показано на рис. 37, то дуговая стрелка поворота осей  до совпадения с главными осями инерции
до совпадения с главными осями инерции  на угол направлена к отрицательному направлению оси
на угол направлена к отрицательному направлению оси  . Поэтому в (35′)
. Поэтому в (35′)  , следует взять со знаком минус, а
, следует взять со знаком минус, а  знаком плюс, в чем нетрудно убедиться, используя (35) и таблицу углов. Имеем:
знаком плюс, в чем нетрудно убедиться, используя (35) и таблицу углов. Имеем:
= 90°; р2 = а; Р3 = 90° + а;
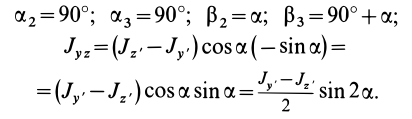
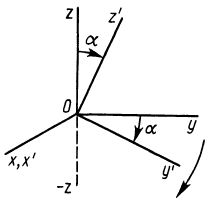
Рис. 37
Аналогично при совпадении осей  с Оу’ и повороте осей Oxz вокруг
с Оу’ и повороте осей Oxz вокруг  до совпадения с осями
до совпадения с осями  на угол
на угол  от
от  к
к  в направлении против часовой стрелки имеем:
в направлении против часовой стрелки имеем:

При совпадении осей  и
и  и повороте осей вокруг на угол
и повороте осей вокруг на угол  от
от  к
к  против часовой стрелки получим:
против часовой стрелки получим:

- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
- Теоремы об изменении количества движения и о движении центра масс
- Теорема об изменении кинетического момента
- Прямолинейное движение точки
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
- Относительное движение материальной точки
Как найти момент инерции прямоугольной пластины относительно свободных осей?
Профи
(522),
закрыт
12 лет назад
Владимир Костюк
Искусственный Интеллект
(120357)
12 лет назад
Согласно теореме Штейнера (теореме Гюйгенса-Штейнера) , момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
J=J(c)+md^2
Если — момент инерции тела относительно оси, проходящей через центр масс тела, то момент инерции относительно параллельной оси, расположенной на расстоянии от неё, равен
J=J(0)+md^2
где — m . полная масса тела.
Главные моменты для пластины
По Y J(y)=bh^3/12
По Z J(z)=hb^3/12.
Приложения кратных интегралов в механике
Краткая теория
Масса и статистические моменты пластики
Если
– область плоскости
, занятая пластинкой, и
– поверхностная плотность пластики в точке
, то масса
пластинки и ее статистические моменты
и
относительно осей
и
выражаются двойными интегралами:
Если
пластика однородна, то
Координаты центра тяжести пластики
Если
– центр тяжести пластики, то
где
– масса пластинки и
– ее статистические моменты относительно осей
координат.
Моменты инерции пластики
Моменты
инерции пластинки относительно осей
и
соответственно равны:
Момент инерции пластики относительно
начала координат:
Полагая
, получаем геометрические моменты инерции плоской
фигуры.
Масса тела, занимающего область
![]() и статистические моменты тела относительно
и статистические моменты тела относительно
координатных плоскостей
где
– плоскость тела в точке
Координаты центра тяжести
Если тело
однородно, то формулах для координат центра тяжести можно положить
.
Моменты инерции относительно
осей координат
Полагая в
этих формулах
, получаем геометрические
моменты инерции тела.
Примеры решения задач
Задача 1
Вычислить
массу материальной пластины, занимающей область
плоскости
, если поверхностная
плотность
и границы области
заданы уравнениями.
Решение
Сделаем
чертеж области
:
Искомая
масса материальной пластины:
Ответ:
Задача 2
Найти
статистический момент фигуры, ограниченной линиями
и
относительно оси абсцисс.
Решение
Сделаем
чертеж:
Статистический
момент относительно оси
:
Ответ:
Задача 3
Вычислить
координаты центра масс однородной
материальной пластины
, ограниченной данными
линиями:
Решение
Сделаем
чертеж:
Масса
пластинки:
Статистические
моменты:
Искомые
координаты центра масс:
Ответ:
.
Задача 4
Вычислить массу тела
, ограниченного заданными поверхностями
-плотность в
точке
.
Решение
На сайте можно заказать решение контрольной или самостоятельной работы, домашнего задания, отдельных задач. Для этого вам нужно только связаться со мной:
ВКонтакте
WhatsApp
Telegram
Мгновенная связь в любое время и на любом этапе заказа. Общение без посредников. Удобная и быстрая оплата переводом на карту СберБанка. Опыт работы более 25 лет.
Подробное решение в электронном виде (docx, pdf) получите точно в срок или раньше.
Изобразим
тело на рисунке:
С боков
тело будет ограничено цилиндром
и плоскостями
. Сверху плоскостью
Проекция на плоскость
:
Ответ:
Задача 5
Найти
момент инерции однородного шара
с массой
относительно оси
.
Решение
Момент
инерции относительно оси
можно найти по формуле:
Шар
однородный, поэтому плотность:
Перейдем
к сферическим координатам:
Получаем:
Ответ:
